基于ADAMS微型观光旅游电动汽车平顺性优化_裴未迟
基于ADAMS的汽车多种工况的仿真

右后轮: Step ( tmi e, 0, 0, 5, 60) + Step ( tmi e,
15, 0, 20, 30); 左右后轮的制动力表达式: Step ( t im e, 50, 0,
3结 语
建立了某轿车的整车动力学仿真模型, 包括前悬
68
华北水利水电学院学 报
2009年 8月
产品设计开发周期、降低设计成本、提高设计质量的 目的.
1) 轻载爬坡速度; 2) 满载爬坡速度 3) 轻载爬坡加速度; 4) 满载爬坡加速度
图 3 轻、满 载爬坡速度和加速度
架、转向机构、后悬架以及底盘车身等. 完成了车辆 直行工况和爬坡工况在轻载、满载的情形下仿真和 分析, 并对各自的特点作出对比. 该方案为车辆在虚 拟环境下进行多工况的仿真分析提 供了一个新平 台, 为车辆深层次的设计和优化提供了一种新手段. 可以帮助相关企业摆脱对物理样机的依赖, 达到缩短
1 汽车模型的创建
1. 1 建 模 汽车包括车身、发动机、行走系、转向系、制动
系、传动系 和辅助设 备 [ 2- 3] , 是 一个复杂 的机械系 统, 如果按照车辆的真实构造进行建模, 工作量非常 大. 因此根据研究的目的, 在建模时对车辆的结构进 行了适当的抽象、简化, 对建立的整车动力学模型作
参考文献
[ 1] 唐应时, 廖丹, 李克安, 等. 汽车 双前桥转 向系统 的运动 学和动力学的 建模与 仿 真分 析 [ J]. 湘 潭大 学学 报: 自 然科学版, 2003, 28( 3): 98- 101.
[ 2] 王望予. 汽车设计 [M ]. 北京: 清华大学出版杜, 2002. [ 3] 陈家瑞. 汽车构造 [M ]. 北京: 人民交通出版社, 2000. [ 4] 李军, 邢俊文, 覃文洁, 等. ADAM S 实例教程 [M ]. 北京:
基于ADAMS的汽车平顺性仿真分析

基于ADAMS的汽车平顺性仿真分析贺翠华,王树凤(山东理工大学交通与车辆工程学院,山东淄博255049)摘要:本文利用动力学仿真软件ADAMS对汽车的平顺性进行了分析。
首先在view中建立了车身与车轮双质量二自由度振动模型,然后用vibration模块对其进行了振动仿真分析。
分别研究了悬架刚度、悬架阻尼系数、非悬挂质量和轮胎刚度对平顺性的影响。
结果表明,在相同的路面输入下,通过合理选择悬架和轮胎参数可以明显改善汽车平顺性。
关键词:平顺性;仿真;性能评价;虚拟样机技术The Research of Vehicle Riding Comfort Based onADAMSHE Cui-hua;WANG Shu-feng(School of Transportation and Vehicle Engineering,Shandong University of Technology,Zibo China255049)Abstract:The riding comfort is one of the most important performances of vehicle.This paper analyses the vehicle riding comfort performance using ADAMS/view.According to the vehicle vibration theory,the vehicle is simplified to a dual mass model with two freedoms.The simulation of the model is carried out using ADAMS/Vibration.The influence of suspension stiffness,damping,body mass and tire stiffness on the comfort has been investigated.The result shows that choosing the appropriate parameters of suspension and tire can improve the vehicle riding comfort performance. Key words:riding comfort performance;simulation;performance assessment1引言随着汽车车速的提高,汽车的乘坐舒适性越来越受到人们的重视,而汽车的乘坐舒适性与汽车的平顺性息息相关。
基于ADAMS的有轨引导小车运动学仿真及设计改进

图 4小车导 向轮在水平平行轨道方 向( 轴向) 受力
通过图 4可看 出, 小车前后导 向轮在接触轨道侧栏后产生
压 力 , 车 前后 两 导 向轮所 受 平 均压 力 之 和 达 到 3 0 小 0 N左 右 。 南
于导向轮功能和结构限制 , 向轮润滑和受力能 力都差。长期承 导
受 如 此 大 的力 , 车导 向轮 容 易损 坏 而 引起 事 故 。 小
第 l 0期 21 0 2年 l 0月
文 章 编 号 :0 1 3 9 ( 0 2 1— 0 l 0 10 — 9 7 2 1 )0 0 8 一 3
机 械 设 计 与 制 造
Ma h ne y De i n c i r sg & Ma fc u e nu a t r 81
基于 A A D MS的有轨 引导 小车运动 学仿 真及设 计改进 水
5原 因分析及设计改进
为考虑小车运行平稳 , 小车大部分结构都对称设计 , 而电机
} C lb s l e n d t x ,sln nori e frao t a.co -{ CTo y eit e o t e i o h air ui iu o n d e mt n h s fA cr I n n a d nh o s ef e s e tg n c d a d o i o e h t t l t f d
Ve il( hce RGV)a e nAD B s do AMS
H n, A GJa— u I u -i H A G D n- i2 U Z i u U MiI N i g o, X e t , U N o g xn, h- n Y n WU  ̄ L j
( .olg f c a ia gn e ig Do g u iest , h n h i 01 2 C ia 2S a g a o it sEq ime t 1C l eo h nc l e Me En ie rn , n h aUnv ri S a g a 6 0, hn ; .h n h i gsi up n y 2 L c
基于ADAMS微型观光旅游电动汽车平顺性优化
步 对 这 些 参 数 优 化 达 到 对 整 车 平 顺 性 优 化 的
目的 。
1 悬架刚度 、 阻尼 参 数 约 束 条 件
前后悬 架 刚度 和 阻尼对 汽车 的平顺 性 有重要 的 影 响。汽 车车 身从 满载 位置 经压 缩到 达最 大运 动位 置后所 经过 的 z轴 方 向位移 。 悬架 的 设 计 要 综 合 考 虑其运 动 的 限位 块位 置 , 当两 者设 计不 合理 , 会
改 弹簧 刚度 和减震 器 阻尼 相 对 比较 容 易 , 成 本 比较 低 。基 于唐 山市 电动 汽车重 点 实验 室前 期研 制 的微 型观 光旅 游 电动 汽 车 的平 顺 性 差 的 缺 点 , 本 文 以 此
降低汽车平顺性 。 车轮与路面间相对动载 能够表 现 出汽车行 驶 时接地 特性 的好 坏 , 越 小反 应 汽 车 接 地特 性越 差 , 故 其 安 全性 能差 。故综 合 以上 因素 得 出汽 车悬 架 的 以下 约束 条件 。
⑥
2 0 1 4 S c i . T e c h . E n g r g .
交通运输
基于 A D A MS微 型 观 光 旅 游 电动 汽 车 平 顺 性优 化
裴未迟 , 张文明 乔 长胜 李耀刚。
( 北京科技大学机械工程学 院 , 北京 1 0 0 0 8 3; 河北联 合大学机械工程学 院 , 唐山 0 6 3 0 0 9 )
第 1 4卷
第 6期
2 0 1 4年 2月
科
学
技
术
与
工
程
Vo L 1 4 No . 6 Fe b. 2 01 4
1 6 7 1 —1 8 1 5 ( 2 0 1 4 ) 0 6 — 0 2 5 1 — 0 5
基于 ADAMS/Car 微型观光电动汽车典型路面平顺性仿真
基于 ADAMS/Car 微型观光电动汽车典型路面平顺性仿真乔长胜;李耀刚;琚立颖;冯泽;张文明【摘要】Based on the situation that the micro tourism electric vehicles which are made in domestic have bad ride comfort,based on the micro tourism electric vehicle of Tangshan electric vehicle key laboratory ,build a full vehicle ADAMS/Car virtual prototype model .Make this micro tourism electric vehicle at a certain speed pass long slope form convex block of the road and triangle convex block of the road for ride comfort simulation analysis of typical road surface .Draw cars center of mass vertical acceleration curve in the postprocessor module ,and then evaluate the ride comfort of the car .For the future to improve the electric car performance to provide certain theoretical basis da-ta in all respects .%基于国内以传统汽车底盘为基础进行改装设计所研制的电动汽车出现平顺性差等缺点,以唐山市电动汽车重点实验室前期研制的微型观光旅游电动汽车为基础,建立整车AD-AMS/Car虚拟样机模型。
基于ADAMS的空气悬架客车平顺性仿真与试验

图 5 车身三维模型
Fig1 5 Body 3D modelJx2×来自B l×J y ,
J y ( m1 + Km2) a2 + (1 - K) m2 b2 ,
其中 ,车辙宽度 B = 2 m;车身总长度 l = 81985 m;汽车
满载时前 、后轴载质量 m1 = 4 190 kg , m2 = 8 000 kg;汽
收稿日期 : 2008Ο09Ο16 基金项目 : 浙江省科技厅重大科技专项重点攻关项目 (2006C11089) 作者简介 : 李仲兴 (1963 - ) , 男 , 上海人 , 教授 , 博士生导师 , 从事汽车动态性能及安全性能研究 (zhxli @ujs1edu1cn)
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
供了一种全新的方法[2 - 3] 。以某空气悬架客车为研究 对象 , 首先应用三维制图软件建立其三维实体模型 , 将模型的数据文件转化为 ADAMS 软件数据文件 ; 利 用 ADAMS/ Car 建立整车多体系统动力学仿真模型 , 然后对其进行整车平顺性仿真和悬挂系统固有频率仿 真试验 。最后对样车进行相应的试验 , 并将仿真结果 与试验结果进行了对比 。结果表明 , 该车的平顺性能 良好 , 整车虚拟试验可行 , 虚拟仿真技术能够对车辆 的行驶平顺性进行有效预测和评估 。
spectrum density
平顺性仿真数据处理后的垂向 、纵向 、横向 、及总 加权加速度均方根值分别为 : 01392 4 、01088 2 、01104 0 、01436 4 m/ s2 。 212 固有频率仿真试验
基于ADAMS的电动汽车专用底盘平顺性分析
底盘平顺性是评判汽车质量好坏的重要因素之 一[1],传统汽车底盘大多采用经典的h 型底盘车架,经 过 数 十 代 设 计 师 的 改 进 和 试 验 ,其 平 顺 性 已 经 满 足 大 多 数 车 型 ,但 这 种 底 盘 并 不 适 用 于 近 年 来 日 趋 流 行 的 两座轻型电动汽车[],需要重 新 定 义 、设计专用底盘来 满 足 它 的 平 顺 性 。直 接 制 造 样 机 进 行 试 验 会 浪 费 人 力 和 物 力 ,所 以 文 章 提 出 利 用 ADAMS软件构建底盘平 顺 性 的 虚 拟 试 验 平 台 ,对 一 款 轻 型 电 动 汽 车 专 用 底 盘 的平顺性进行试验和优化,验证并确定了该轻型轮毂 电机驱动型电动汽车的最优底盘形态。 1 ADAMS在机械动力学分析中的运用
基金项目 :20 1 4 年 杭 州 萧 山 区 科 技 计 划 项 目 ( 2014110)
— 技术聚焦 FOCUS
Er4i^ 汽车工_师
台 ,在样机试验前排除大部分不合理的设计。文章设计 了一款两座轻型电动汽车专用底盘,如 图 1 所 示 ,使用 轮毂电机作为动力源,并 利 用 ADAMS平台分析底盘的 平 顺 性 ,然后优化设计的轮毂电机驱动型专用底盘,以 下简称专用底盘。
Ride Comfort Analysis of Special Chassis for Electric Vehicles Based on ADAMS<
A b s tra c t:Electric vehicle has elim inated the transmission system and engine system, its principle is completely different from that of a conventional fuel vehicle. It is necessary to redefine and design a special chassis to meet its ride comfort. The experim enter designed a lightweight two -s e a t electric vehicle chassis, built and designed a sim ulation test using ADAMS dynamic simulation software, extracted and quantified the vibration values of the chassis before and after optimization using ADAMS's unique dynamic analysis processing function, made a table for chassis smoothness comparison, and selected a light hub motor. The optimal chassis shape for a car is a field type rather than a traditional H type. This method can be further applied to the chassis design of other types of electric vehicles. K ey w o r d s :C a r ch assis; R id e c o m fo rt; A D A M S ; V irtu a l te s t
基于Adams_Car的汽车平顺性仿真研究
第27卷第3期2009年5月北京工商大学学报(自然科学版)Journal of Beijing Technology and Business University (Natural Science Edition )Vol 127No 13May 2009 文章编号:167121513(2009)0320024204基于Adams/C ar 的汽车平顺性仿真研究邹 丹, 黄志刚, 朱 慧(北京工商大学机械工程学院,北京 100048)摘 要:依据多体动力学理论,利用Adams 的专业模块Adams/Car 建立某型号汽车的整车样机模型,探索进行汽车仿真的途径,进行了直线加减速仿真,将仿真结果与试验结果进行了对比,并做了相应的分析.关键词:Adams/Car ;平顺性;仿真中图分类号:TP39119 文献标识码:A 收稿日期:2008-12-30作者简介:邹 丹(1984—),女,湖北襄樊人,硕士研究生,研究方向为虚拟现实技术与计算机仿真.黄志刚(1966—),男,上海人,教授,博士,主要从事车辆工程方面的研究.通讯作者.朱 慧(1973—),女,陕西西安人,副教授,博士,主要从事图像处理方面的研究. 影响汽车平顺性的因素是多方面的,它包括路、车、人三个环节,其中人是最活跃的因素,因此汽车平顺性的评价极为复杂.振动对人体的直接影响涉及躯干和身体局部的生物动态反应行为、生理反应、性能减退和敏感度障碍,是影响车辆乘坐舒适性的主要因素.振动加速度是评价振动对人体影响的基本参数,振动频率是振动运动速度的表征.在汽车的各种性能评定方法中,以平顺性较为困难和复杂,人体对机械振动的反应既取决于机械振动的强度、频率、作用方向、曝露时间,也取决人的心理和生理状况.人体对振动的反映是一个十分复杂的心理和生理过程,因人而异.能客观评价一辆汽车的平顺性好坏是一件不容易的事情[1].利用虚拟样机技术可以实现在计算机上建立汽车的三维实体模型,并对虚拟模型进行动力学分析,还可以通过修改不同参数并快速观察车辆的运转状态、动态显示仿真数据结果.本文依据多体动力学理论,利用Adams 的专业模块Adams/Car 建立某型号汽车的整车样机模型,进行了汽车平顺性仿真实验,将仿真结果与试验结果进行对比,并做了相应的分析.1 整车模型的建立建立轿车各子系统的模型,包括前后悬架、转向系统、动力总成、轮胎及车架的模版,然后生成各子系统模型,包括前后悬架系统、转向系统、操纵系统、制动系统、前后轮模型以及底盘系统等部分[2],最后装配成整车虚拟样机模型.建成后的整车模型如图1.坐标系说明:X 轴2汽车纵向,正向向后;Y 轴2汽车横向,正向向左;Z 轴2汽车垂向,正向向上.汽车的主要技术参数见表1.图1 某型号汽车整车模型在Adams/Car 中,刚体动力学参数的确定有两种方式:第一,根据用户的自定义数据来确定;第二根据构件的几何形状和密度来确定.文中对车身及动力总成系统等动力学参数采用用户的自定义数据.虽然所建模型与实际汽车有差别,但并不影响其动力学特性.建模时,只要保证各系统之间的连接方式和连接位置正确,车辆模型就是合理的.42表1 汽车的主要技术参数名称单位数值车身质量kg1380前轮距mm1535长×宽×高mm4680×1700×1423主销内倾角°13°35′前悬架弹簧刚度N/mm18后悬架弹簧刚度N/mm23转向系传动比—2617名称单位数值轴距mm2860后轮距mm1565主销后倾角°1°30′前轮外倾角′-15′±15′后轮外倾角°1°40′±20′阻力系数—0136转向系刚度N/mm117×105 整车模型建立之后,为得到正确的仿真结果,要保证仿真模型能够反映实际系统的结构,并能在计算机上运行,需要检验模型的有效性.在Adams/ Car中,模型的检验主要包括:模型的验证和确认[3].模型的检验主要用于考察模型能否在计算机上正确实现.利用Adams/View中的Model Verify 功能来验证整车模型没有过约束.模型的确认主要是用于考察整车模型与实际系统之间的关系,即在相同的输入条件和运行环境下,通过比较仿真结果和实际系统输出结果的一致性来评价模型的可信度.本文通过仿真分析和试验研究来确认模型的可信度.2 仿真分析211 随机路面输入的平顺性评价体系最新的ISO2631:1997(E)标准及我国的《汽车平顺性随机输入行驶试验方法》等标准,推荐以总加权加速度均方根值评价汽车平顺性及振动对人体舒适和健康的影响.由ISO2631:1997(E)知,当评价振动对人体健康的影响时,仅需考虑纵向、横向、垂向三个轴向,且水平、横向两个轴向的加权系数比垂直轴向更加敏感,另外规定靠背水平轴向可由椅面水平轴向代替.本仿真模型采用总加权加速度均方根值评价汽车的平顺性,其包括汽车纵向、横向、垂向的加权加速度均方根值.取水平轴向加权系数k=114,总加权加速度均方根值的计算公式为[4]:a w={(114a w x)2+(114a w y)2+a2w z}1 2,其中:a w为总加权加速度均方根值,m/s2;a w x为x 方向加速度,m/s2;a w y为y方向加速度,m/s2;a w z为z方向加速度,m/s2.将Adams/Car仿真得到的曲线,在Adams/Car的后处理器中转化为二进制文件,经过数学计算,得到总加权加速度均方根值a w.同理,将试验得到的数据进行MA TLAB处理,得到总加权加速度均方根值a w的试验值.212 直线加减速仿真按照国家标准G B/T4970—1996《汽车平顺性随机输入行驶试验方法》[5]的规定,对整车进行汽车平顺性仿真试验.设定车辆在B级路面上以60 km/h的速度匀速行驶,车辆状态为空载,测试点为驾驶员座椅处,测量出X,Y,Z方向的加速度曲线,并对加速度曲线做快速傅立叶变换得到加速度功率谱曲线.得到的X方向的加速度功率谱曲线如图2.其他方向的加速度功率谱曲线同理可以得到.图2 加速度功率谱的仿真曲线将初始车速设为30km/h,重复上述试验,得到相应的加速度功率谱曲线.根据总加权加速度的计算公式,可求得各个速度下的总加权加速度值.总加权加速度与人的主观感觉的对应关系,见表2.表2 总加权加速度与人的主观感觉的对应关系总加权加速度均方根值/m・s-2人的主观感觉<01315没有不舒服01315~0163有一些不舒服015~1相当不舒服018~116不舒服1125~215很不舒服>210极不舒服 根据仿真曲线数据及总加权加速度的计算公52第27卷第3期 邹 丹等:基于Adams/Car的汽车平顺性仿真研究式:车速为30km/h 时,a w =0101774m/s 2;车速为60km/h 时,a w =0104437m/s 2.两种车速下的a w不同,说明车速对汽车的平顺性有一定的影响,但a w 在两种车速下的值均小于01315m/s 2.根据加权加速度均方根值与人体主观感觉的对应关系知,当加权加速度均方根值小于01315m/s 2时,人体主观没有不舒适的感觉.这两个加权加速度值属于人体能接受的范围以内,此时不会产生不舒适的感觉.根据仿真结果可以得到:该车在30km/h 和60km/h 速度下的平顺性能良好.3 试验研究测量车辆座椅处的加速度响应,并对响应做快速傅立叶变换,进行频谱分析,得到测试结果,从而得到车辆座椅处加速度响应的能量分布,了解整车的行驶平顺性,进一步验证利用Adams/Car 建立的整车模型的正确性[6].试验天气:晴朗.试验道路:平整水泥路面(假定为B 级路面).试验工况:车速60km/h.试验仪器:XW V G 7100陀螺仪、YUASA (日本汤浅)N1202H 蓄电池、笔记本电脑、某型号轿车,软件为星网迅达惯性测量演示软件.试验规范:温度12℃;风力3~4级;试验方案按照汽车平顺性随机行驶试验方法制定.图3 采集的路面随机信号试验过程说明:对某型号汽车进行道路测试,利用陀螺仪测量加速度信号,根据信号处理知识,将所得数据文件导入MA TLAB ,得到时域图形,并对时域图形作快速傅立叶变换,并进行频谱分析.主要给出座椅处的加速度功率谱曲线.用于直线加减速试验的为水泥路面.图3为采集到的路面随机信号;图4为经过MA TLAB 处理后的路面随机信号.重复上述试验,采集到汽车30km/h 时路面信号曲线,并据此信号曲线经MA TLAB 处理得到处理后的路面随机信号曲线.根据总加权加速度公式,得到汽车总加权加速度.车速30km/h 时,a w =01021m/s 2;车速为60km/h 时,a w =01047m/s 2,根据试验结果和加权加速度均方根值与人体主观感觉的对应关系知,汽车在30km/h 和60km/h 速度下的平顺性能良好.仿真结果与试验结果吻合.图4 处理后的路面随机信号对比图2和图4的功率谱曲线知道:同样的速度下,最大的波峰都出现在2Hz 左右,仿真结果与试验结果基本吻合.另外,试验得到的时域波形包含了噪声信号、随机干扰信号,本文频谱分析没有进行滤波,造成图形局部失真.在利用Adams/Car 对汽车进行平顺性仿真分析时,各种状况都处在理想状态,没有实际试验中的各种干扰因素,因而仿真结果两个图形没有重合,仿真曲线比较光滑,实测信号相对比较杂乱,但它是汽车真实运行情况的反映.因此,进行汽车设计只进行仿真还不够,一定要和试验结合起来,才能更真实地反映汽车的状态.4 结 论利用Adams/Car 建立轿车的虚拟样机模型,并利用Adams/Car 虚拟试验台进行了汽车平顺性仿真分析,得到了不同车速下的加速度功率谱曲线,仿真结果与试验结果达到了工程上的满意度,验证了虚拟样机模型的正确性.仿真结果表明,运用虚拟试验台技术对汽车进行平顺性仿真研究能够反映实际情况,并且可以考虑到系统的非线性,仿真结果可靠,对整车设计开发有一定的参考意义.参考文献:[1] 黄志刚,毛恩荣,梁新成,等.微型轿车八自由度整车动力学仿真与试验[J ].农业机械学报,2008,39(6):29-33.[2] 隗寒冰,邓楚南,何文波.基于ADAMS 软件的汽车平62北京工商大学学报(自然科学版) 2009年5月顺性仿真分析[J ].机械设计与制造,2006(7):75-76.[3] 黄承修.基于虚拟样机技术的汽车行驶平顺性仿真研究[D ].浙江:浙江大学,2006.[4] 余志生.汽车理论[M ].4版.北京:机械工业出版社,2006.[5] G B/T4970—1996.汽车平顺性随机输入行驶试验方法[S].[6] 雷良育.基于虚拟现实的汽车平顺性仿真试验系统设计[J ].传感技术学报,2006,19(4):1065-1069. ADAMS/CAR 2BASED VEHIC LE RIDE COMFORT SIMU LATIONZOU Dan , HUAN G Zhi 2gang , ZHU Hui(College of Mechanical Engi neeri ng ,Beij ng Technology and B usi ness U niversity ,Beiji ng 100048,Chi na )Abstract :Based on the multi 2body dynamic theory ,a multi 2body dynamic model was established with the use of Adams/Car.The line 2change simulation of the model was carried out successfully .The re 2sult of the simulation agreed well with the practical situation.In addition ,more analysis on the result has been done.K ey w ords :Adams/Car ;ride comfort ;simulation(责任编辑:檀彩莲)(上接第23页)参考文献:[1] 北京市工程建设质量管理协会.DBJ/T0126922003,建筑结构长城杯工程质量评审标准[S].北京:中国建筑工业出版社,2003.[2] 国营北京电子管厂.冷冲压与弯曲机模具[M ].北京:国防工业出版社,1982.DESIGN AN D MANUFACTURE OF PLATFORM E LECTR OMOTIVETURN OVER FORMWORKCHEN G Jian 2bing 1, WAN G Xiao 2bei 1, YAN G Feng 2qing 2(1.College of Mechanical Engineering ,Beijing T echnology and B usiness University ,Beijing 100048,China;2.The No.2Engineering Co L td ,China Railw ay Eighteenth B ureau Group ,Tangshan 064000,China )Abstract :A kind of new typed platform electromotive turnover formwork has been designed accordingto the structure characteristic of tower column of concrete self 2anchor cable bridge ,it had successfully resolved the problem of pouring concrete ,the vertical transport and installation of tower column form 2work ,the structure of formwork and shift platform and the key manufacture technology are introduced in detail.K ey w ords :cable bridge ;shifting platform ;electromotive turnover formwork(责任编辑:檀彩莲)72第27卷第3期 邹 丹等:基于Adams/Car 的汽车平顺性仿真研究。
基于ADAMS 软件的汽车平顺性仿真分析
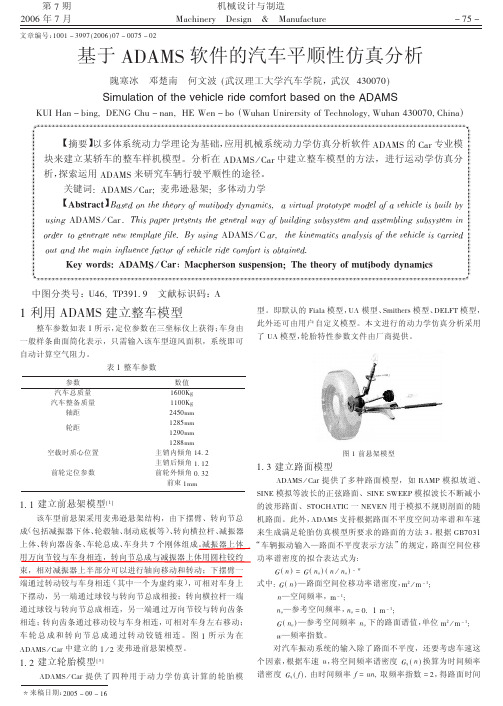
**********************************************************************************************************************************************************++++基于ADAMS 软件的汽车平顺性仿真分析隗寒冰邓楚南何文波(武汉理工大学汽车学院,武汉430070)SimuIation of the vehicIe ride comfort based on the ADAMSKUI Han -bing,DENG Chu -nan,HE Wen -bo (Wuhan Unirersity of Technology,Wuhan 430070,China )1利用ADAMS 建立整车模型整车参数如表1所示,定位参数在三坐标仪上获得;车身由一般样条曲面简化表示,只需输入该车型迎风面积,系统即可自动计算空气阻力。
表1整车参数1.1建立前悬架模型[1]该车型前悬架采用麦弗逊悬架结构,由下摆臂、转向节总成(包括减振器下体、轮毂轴、制动底板等)、转向横拉杆、减振器上体、转向器齿条、车轮总成、车身共7个刚体组成。
减振器上体用万向节铰与车身相连,转向节总成与减振器上体用圆柱铰约束,相对减振器上半部分可以进行轴向移动和转动;下摆臂一端通过转动铰与车身相连(其中一个为虚约束),可相对车身上下摆动,另一端通过球铰与转向节总成相接;转向横拉杆一端通过球铰与转向节总成相连,另一端通过万向节铰与转向齿条相连;转向齿条通过移动铰与车身相连,可相对车身左右移动;车轮总成和转向节总成通过转动铰链相连。
图1所示为在ADAMS /Car 中建立的1/2麦弗逊前悬架模型。
1.2建立轮胎模型[3]ADAMS /Car 提供了四种用于动力学仿真计算的轮胎模型。
即默认的Fiala 模型,UA 模型、Smithers 模型、DELFT 模型,此外还可由用户自定义模型。
基于ADAMS和MATLAB的汽车悬架系统仿真分析
基于ADA MS和MAT LAB的汽车悬架系统仿真分析3韩朝晖(湖南文理学院继续教育学院,湖南常德 415000)摘要:文中对汽车半主动悬架系统的仿真分析采用了ADAMS和MAT LAB联合仿真方法。
在ADAMS中建立了1/4汽车悬架的动力学模型,然后用MAT LAB软件建立汽车半主动悬架的阻尼控制模型,通过改变阻尼系数减小汽车的垂直振动。
在MAT LAB/SI M UL I N K中建立采用模糊逻辑控制的控制系统模型,分析汽车车身垂直方向的加速度,来达到汽车行驶的平顺性。
ADAMS和MAT LAB联合仿真方法为汽车动力学仿真提供了一种新途径。
关键词:虚拟样机技术;半主动悬架;模糊控制;联合仿真中图分类号:TH122 文献标识码:A 文章编号:1001-2354(2008)07-0016-04 车辆振动是影响车辆行驶性能的重要因素,这种振动不仅大大降低了车辆行驶平顺性,也影响其操纵稳定性。
车辆振动严重时,还影响其行驶速度,同时车辆振动也是车内噪声的主要来源。
为了提高汽车平顺性,减少振动,对汽车的悬架控制系统进行研究显得尤为重要。
1 ADAMS与MAT LAB软件简介ADA MS是目前世界上最著名的虚拟样机分析软件,广泛应用于汽车制造业、工程机械、航空航天、国防等领域。
ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统动力学模型,利用拉格朗日第一类方程建立系统最大量坐标动力学微分-代数方程,求解器算法稳定,对刚性问题十分有效,可以对虚拟机械系统进行静力学、运动学和动力学分析,后处理程序可输出位移、速度、加速度和反作用力曲线以及动画仿真。
仿真结果可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷,以及计算有限元的输入载荷等[1~3]。
MAT LAB是矩阵实验室(M atrix Laborat ory)的简称,除具备卓越的数值计算能力外,还具有功能强大的工程应用工具箱,广泛应用于我国的各项领域[4,5]。
某电动商用车平顺性仿真优化研究

71 引言汽车行驶的平顺性主要指路面不平引起的汽车振动,研究平顺性的目的是,保持汽车在行驶过程中,产生的振动和冲击环境对乘员舒适性或货物完整性的影响在一定界限之内。
汽车平顺性是评价汽车性能的主要指标之一,其优劣对乘坐舒适性、零部件及路面的疲劳寿命和行驶安全性均有重要影响,如何提高平顺性一直以来受到各整车厂、各国研究机构和学者的重视。
电动汽车作为区别于传统内燃机汽车的新能源车型,具备绿色、环保、节能等技术优势,将是未来汽车的主要类型。
围绕汽车平顺性,国内外学者已开展了大量研究,从已有的研究来看,有关传统内燃机汽车平顺性分析模型的研究已较为成熟。
但对于电动汽车平顺性的研究尚较少,且在已有的电动汽车平顺性分析中,一般不考虑驱动电机振动。
而电机本身的动力学特点与内燃机存在差异,电动汽车行驶在不平路面时,电机的振动状态及其对整车平顺性的影响鲜有研究。
有鉴于此,本文针对某型电动商用车,建立整车ADAMS 平顺性分析模型。
在此基础上,分析电动商用车驾驶室半浮和全浮、电池前置和电池中置对平顺性的影响规律。
此外,由于考虑电机参振,还分析了不同减振器布置形式、减振器刚度、阻尼对电机和整车平顺性特性的影响规律。
2 电动汽车的主要结构传统汽车是通过液态能源在发动机内燃烧后释放的热能转化为机械能,再通过传动系统来驱动汽车运动,与其不同,电动汽车以蓄电池、太阳能电池、燃料电池、电容器或飞轮作为能源,并把能量通过电机来直接驱动汽车。
不管是电容器还是飞轮,比能量都很低,所以很少把它们作为电动汽车单独的能量源。
除了能量源不同外,电动汽车和传统汽车的驱动系统有很大的差别。
传统汽车基本上都是通过车桥及变速机构驱动,而电动汽车是通过电动机直接驱动。
电动汽车发展比较晚,所以很多方面都是运用传统汽车的发展技术,但是作为新生物,电动汽车所需要的技术特性都是传统汽车无法企及的。
与传统汽车不同,高配置性能强的电动汽车基本上都是以某种原有的、特定车型的车体和车架为设计基础。
基于ADAMS的商务车平顺性仿真

基于ADAMS的商务车平顺性仿真
刘婷;朱中华;姜武华
【期刊名称】《客车技术》
【年(卷),期】2005(000)003
【摘要】在ADAMS环境下建立了某商务车前后悬架、轮胎、车身、转向系和人--椅等子系统和整车的多体动理学模型,编制了路面生成软件,生成不同等级的随机路面文件,对模型分别进行前后悬架偏频仿真和随机路面输入的动理学仿真,把仿真的数据输入编制的平顺性评价程序中进行计算,结果与实车试验结果吻合较好.
【总页数】4页(P32-35)
【作者】刘婷;朱中华;姜武华
【作者单位】深圳市运发实业公司;江淮汽车股份公司;合肥工业大学机械与汽车工程学院
【正文语种】中文
【中图分类】U46
【相关文献】
1.基于ADAMS对商用车推力杆布置及整车平顺性的仿真分析和探讨 [J], 陈运广;朱庆晓
2.基于ADAMS的巴哈赛车悬架平顺性及操纵稳定性仿真 [J], 郑英龙;汪博文
3.基于ADAMS的牵引车平顺性仿真与参数优化 [J], 赵化刚;范养强;刘强
4.基于ADAMS的巴哈赛车悬架平顺性及操纵稳定性仿真 [J], 郑英龙;汪博文
5.基于Adams/car汽车平顺性仿真与分析 [J], 张晨光;王琳;苏罗;秦昊雯
因版权原因,仅展示原文概要,查看原文内容请购买。
某电动观光车平顺性仿真分析

某电动观光车平顺性仿真分析石明顺; 温博伦; 张严芬【期刊名称】《《汽车实用技术》》【年(卷),期】2019(000)017【总页数】4页(P8-11)【关键词】电动观光车; 虚拟样机; 平顺性仿真【作者】石明顺; 温博伦; 张严芬【作者单位】安徽理工大学机械工程学院安徽淮南 232001【正文语种】中文【中图分类】U461.4前言随着我国经济水平的不断提高以及电动车行业的快速发展,电动观光车作为一种在固定区域内使用的代步车辆,不仅其良好的续航能力和经济性能一直被作为追求的重点,对于整车舒适性的改善,也正逐渐受到广泛关注。
整车平顺性作为乘车舒适性的一个重要指标,主要受到路面激励的影响,而整车大多通过悬架系统衰减振动,因此悬架对平顺性具有决定性的影响。
传统整车平顺性研究需要对真实车辆进行试验,这样往往耗费较大的人力以及财力。
自计算机技术发展以来,国内外已经有很多学者针对汽车行驶平顺性的模型建立和虚拟样机的仿真进行了诸多研究。
如何建立合理正确的虚拟样机不仅影响仿真结果的正确性,同时还会影响汽车行驶的舒适性和安全性预测。
本文采用ADAMS/View 建立虚拟样机对整车平顺性进行模拟仿真,通过虚拟样机建立了悬架以及整车仿真模型,并通过输入随机输入激励和脉冲输入激励进行平顺性仿真,分析了电动观光车的整车舒适性。
1 虚拟样机模型建立1.1 整车模型由于现有五座电动车的实际模型与传统汽车的制作加工略有不同,为了能够真实反应该型号的电动观光车行驶平顺性,本次通过针对实际车辆的零件进行测绘,并且通过运用SolidWorks 建立三维模型。
建模过程中,部分电动观光车的车架、悬架、转向机构、动力总成的质量参数和尺寸参数无法通过测量绘制,故选择询问厂家获取五座电动观光车外壳和整车质量参数。
五座电动观光车的主要参数如表1 所示:表1 五座电动观光车主要参数参数 ?在搭建完整模型之后,在ADAMS/View 中对零件修改材料属性,建立五座电动观光车动力学模型。
基于ADAMS的电动汽车后悬架性能分析与优化

基于ADAMS的电动汽车后悬架性能分析与优化陈双;孙艳【摘要】为了满足后轮定位参数的优化设计要求,基于虚拟样机技术,建立电动汽车后悬架系统模型,并与ADAMS/Car中提供的悬架系统试验台相结合,完成±50 mm 双轮同向跳动试验,分析后悬架系统在随车轮跳动过程中后轮前束角和外倾角随车轮跳动的变化;以此为优化目标,应用ADAMS/Insight模块,进行多目标遗传算法优化,使后轮前束角的变化范围由-0.631~0.536°变为-0.214~0.168°,后轮外倾角的变化范围由-0.957~1.284°变为-0.760~1.148°,达到理想的设计变化范围.优化结果表明,结合ADAMS/Insight进行电动汽车后悬架遗传算法优化确保了后悬架系统的良好性能.【期刊名称】《汽车工程师》【年(卷),期】2016(000)003【总页数】3页(P33-35)【关键词】电动汽车;后悬架;灵敏度分析;遗传算法优化【作者】陈双;孙艳【作者单位】辽宁工业大学;辽宁工业大学【正文语种】中文悬架是将车架(或承载式车身)与车轴弹性连接起来的装置总称[1],是汽车的重要总成之一。
悬架系统运动特性的研究一般利用特制的悬架试验台对其运动特性进行测量,而不是在汽车的行驶过程中对悬架运动特性进行测量。
车辆性能仿真软件ADAMS/Car提供了一个专门用于悬架性能测试的悬架特性虚拟试验台_MDI_SUSPENSION_TESTRIG。
应用该试验台进行悬架运动学仿真分析时,可以向车轮施加垂向运动,如果是对前悬架系统仿真分析,还会辅之以转向盘的仿真形式,使仿真更能体现悬架真实的运动特性。
因此,文章将基于ADAMS/Car悬架仿真试验台进行后悬架运动学性能仿真,并通过遗传算法进行后轮前束角和外倾角随车轮跳动变化的优化,确保后悬架系统的良好性能。
1 后悬架系统虚拟样机模型的建立1.1 后悬架系统三维模型的建立文章研究的电动汽车实车,如图1所示。
基于ADAMS_Carride的轿车平顺性仿真分析_姜波_潘毓学

间频率 n 存在如下函数关系:
Gd( n)
=
Ge
+
Gs ( 2πn) 2
+
Ga ( 2πn) 4
( 1)
▲图 11 车速 60 km / h 时车型Ⅱ车身的垂向加速度曲线
通过频谱分析得到功率谱密度函数,进而计算出各轴向 加权加速度均方根值 axw 、ayw 、azw 。图 10、11 相应的垂向功率 谱密度曲线如图 12、13 所示。
随着计算机技术的发展,数字化虚拟样机技术得到越来 越多的应用。ADAMS 软件是美国 MDI 公司开发的虚拟样 机分析软件,ADAMS / Car 是 MDI 公司与 Audi、BMW、Renault 和 Volvo 等公司合作开发的整车设计软件包[2],集成了他们
收稿日期: 2013 - 11 - 22 基金项目: 吉林省教育厅资助项目( 2011 ~ 446) 、吉林省教育厅“十
本文采用magicformula轮胎模型中的pac200223560r16轮胎模型其特性参数如表轮胎特性参数列表参数数值轮胎自由半径mm344轮胎宽度mm235胎体半径mm190轮胎垂向刚度210000轮胎径向阻尼50最大载荷10125车轮滑移角整车装配模型依次在templatebuilder界面下建立前后悬架轮胎车168机械设计与研究转向系统的模板及建立各子系统连接所需的通讯器转入standardinterface界面下建立相应等式右边由三个部分组成分别由三个相互独立的白噪声所获得10的子系统模型进入adamscarride依次打开各子系统模型选择aridefourposttestrig试验台用通讯器将各子系统连接进行整车装配得到如图车型ii的整车平顺性仿真模型
< 9 时,用基本的评价方法—加权加速度均方根值来评价振
基于ADAMS的电动客车平顺性仿真与试验研究的开题报告
基于ADAMS的电动客车平顺性仿真与试验研究的开题报告题目:基于ADAMS的电动客车平顺性仿真与试验研究一、研究背景随着环保意识的不断提高和政府对新能源汽车的支持,电动客车逐渐成为城市公共交通的重要组成部分。
与传统的燃油客车相比,电动客车具有环保、安静、高效等优点。
但是,在实际运行过程中,电动客车的平顺性问题成为制约其发展的一大难题。
电动客车的电池、驱动电机等重要组件极易受到路况、悬挂系统等因素的影响,加之电动客车本身重量大、车身高等特点,使得其在行驶过程中易出现弹跳、颠簸等问题,影响了乘客的乘坐舒适性和驾驶员的驾驶稳定性。
为解决电动客车平顺性问题,需要进行系统的仿真与试验研究。
利用仿真技术,可以通过建立电动客车的运动模型,模拟不同路况下车辆的运动情况,分析车辆的平顺性问题,并优化车辆的悬挂系统、轮胎、阻尼器等元件的参数,提高车辆的平顺性。
而试验研究则可以直接检验车辆在实际路面条件下的平顺性,优化车辆的设计,提高车辆的运行质量。
二、研究目的与意义本次研究的目的在于,针对电动客车平顺性问题,利用ADAMS仿真软件进行电动客车运动模型建立和仿真分析,结合实际道路试验,研究电动客车的平顺性问题,优化车辆设计,提高车辆的运行质量。
这不仅有助于提高电动客车的安全性和舒适性,也可以促进电动客车在市场上的发展,推动我国新能源汽车产业的发展。
三、研究内容及方法(一)研究内容1.建立电动客车的运动模型;2.利用ADAMS仿真软件对不同路况下车辆的运动进行仿真分析;3.分析电动客车在行驶过程中可能存在的平顺性问题;4.优化电动客车的悬挂系统、轮胎、阻尼器等元件的参数,提高车辆的平顺性;5.进行实际道路试验,检验车辆在实际路面条件下的平顺性。
(二)研究方法1.利用ADAMS软件建立电动客车的运动模型;2.选取不同的路况进行仿真分析;3.分析仿真结果,优化车辆的设计参数;4.进行实际道路试验,检验车辆的平顺性;5.分析试验结果,优化车辆的设计。
车辆平顺性建模与仿真分析
车辆平顺性建模与仿真分析夏建满;李成华【摘要】以某型号专用车为研究对象,以多体系统动力学为研究方法,以国家标准为试验依据,对整车进行了脉冲路面下的实车试验.同时,利用ADAMS软件进行了整车建模和仿真,分析了车辆不同行驶速度下不同测量点的加权加速度变化和功率谱密度分布,并与车辆行驶的平顺性相联系,确定了试验车辆的振动响应关键部位,为整车的进一步优化设计提供了理论和试验依据.【期刊名称】《农机化研究》【年(卷),期】2013(035)003【总页数】5页(P232-236)【关键词】车辆;平顺性;建模;仿真【作者】夏建满;李成华【作者单位】沈阳农业大学工程学院,沈阳110168;沈阳理工大学,沈阳 110159【正文语种】中文【中图分类】TP391.910 引言汽车平顺性是指汽车在一定速度范围内行驶时保证乘员不会因车身振动而引起不舒服和疲劳的感觉以及保持所运货物完好无损的性能[1]。
汽车平顺性研究的本质是研究“路面—车—人”构成的振动系统[2],使汽车振动系统在给定“输入”下的“输出”限制在一定界限范围内,确保乘员具有良好的舒适性[3]。
某型号专用车在低速行驶时主要担负某装备的运输保障任务,在较高车速下行驶时主要担负各种路面条件下运送人员、物资和器材的任务,相应地对车辆本身的行驶平顺性提出了较高的要求。
在给出某型号专用车的总体结构以及技术特点的基础上,应用多体动力学理论及ADAMS软件进行车辆建模和运动学仿真分析,为车辆的优化设计提供理论和试验依据。
1 总体结构及技术特点1.1 总体结构该车发动机前置,长头驾驶室结构,单排座,双侧门;变速箱中置,3个前进挡和一个倒退挡,传动形式为液力传动,能随着外负荷的变化而相应改变其输出扭矩和转速,而且能够吸收和消除来自发动机和外负荷对传动系统的冲击振动;分时四轮驱动,前后桥带机械式差速锁;前悬挂采用双摆臂扭杆弹簧独立悬挂,后悬挂采用二级变刚度钢板弹簧悬挂;制动系采用液压制动、独立双管路系统,前盘式制动器、后鼓式制动器;转向系采用齿轮齿条式转向器;车厢为敞开式,便于运送人员和机具、器材等物资。
基于ADAMS重型汽车操纵稳定性仿真研究

基于ADAMS重型汽车操纵稳定性仿真研究
姜春生;李韶华;路永婕
【期刊名称】《动力学与控制学报》
【年(卷),期】2011(009)003
【摘要】重型汽车如今在交通运输中起着主导作用,其操纵稳定性对于行车的安全性影响巨大.以多体动力学理论为基础,依据东风重型汽车的真实结构与相关特性参数,采用机械动力学分析软件ADAMS,建立了整车虚拟样机模型,并且对该虚拟样车在不同车速下进行双移线的操纵稳定性性能仿真分析.结果表明,本文所建立的虚拟样车与实际东风重型汽车相吻合,为后来的仿真和优化提供了可靠的模型基础.【总页数】3页(P268-270)
【作者】姜春生;李韶华;路永婕
【作者单位】石家庄铁道大学机械工程学院,石家庄050043;石家庄铁道大学机械工程学院,石家庄050043;石家庄铁道大学机械工程学院,石家庄050043
【正文语种】中文
【相关文献】
1.基于Adams重型汽车操纵稳定性仿真分析 [J], 钟亮;雍文亮;居刚
2.基于ADAMS的汽车操纵稳定性仿真试验研究 [J], 程源;张翼;李鹏;董亮
3.基于ADAMS/CAR的方程式赛车操纵稳定性仿真研究 [J], 陈云;
4.基于ADAMS的某款电动车操纵稳定性仿真研究 [J], 胡延明;王凯;王彦婷
5.基于ADAMS的全地形车操纵稳定性仿真研究 [J], 罗钢;李红
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第14卷第6期2014年2月1671—1815(2014)06-0251-05科学技术与工程Science Technology and EngineeringVol.14No.6Feb.2014 2014Sci.Tech.Engrg.交通运输基于ADAMS 微型观光旅游电动汽车平顺性优化裴未迟1,2张文明1乔长胜2李耀刚2*(北京科技大学机械工程学院1,北京100083;河北联合大学机械工程学院2,唐山063009)摘要基于国内所研制的微型观光旅游电动汽车平顺性差的缺点,以多体动力学理论为基础,在ADAMS /Car 中建立唐山市电动汽车重点实验室前期研制的微型观光旅游电动汽车虚拟样机模型。
分析并建立其前后悬架系统弹簧刚度和减震器阻尼约束条件,采用正交实验法在ADAMS /Car Ride 中对整车进行各参数组合的平顺性仿真分析。
获得前后悬架系统参数对此微型观光旅游电动汽车平顺性影响主次顺序,最终得到前后悬架弹簧刚度和减震器阻尼匹配的相对最优解。
大幅度改善了此微型观光旅游电动汽车平顺性,并为进一步提高其平顺性指引了优化方向。
关键词弹簧刚度和减震器阻尼约束正交实验平顺性中图法分类号U469.72;文献标志码A2013年9月29日收到国家自然科学基金项目(50975076)、河北省自然科学基金项目(E2010000939)资助第一作者简介:裴未迟(1975—),男,博士研究生,讲师。
研究方向:车辆虚拟样机与仿真技术,计算机辅助工程等。
E-mail :which_pay@163.com 。
*通信作者简介:李耀刚(1962—),男,博士,教授。
研究方向:机构学与机械力学、计算机辅助工程。
E-mail :jxlyg@heut.edu.cn 。
汽车作为一个非常复杂的振动系统,它的整车结构和外界对此振动系统的“输入”决定了其振动的“输出”[1,2]。
前后悬架减震器阻尼、前后悬架弹簧刚度、车轮空间参数等悬架参数决定了汽车复杂振动系统的结构特征。
通过对悬架系统参数研究进一步对这些参数优化达到对整车平顺性优化的目的。
微型观光旅游电动汽车整车设计结束之后,因质量和几何外形因素修改的成本比较高且难度较大,所以一般不予考虑;对于汽车零部件等的缺陷问题,属于不可控因素且模拟相当复杂,则一般也不予作为影响平顺性因素。
外界输入因素,比如汽车速度、路面的不平度、汽车载荷状态等都属于难以控制的因素,可以使汽车处于不同工况下行驶来研究这些因素对平顺性的影响。
悬架刚度和减震器阻尼对此微型观光旅游电动汽车平顺性影响最为突出且修改弹簧刚度和减震器阻尼相对比较容易,成本比较低。
基于唐山市电动汽车重点实验室前期研制的微型观光旅游电动汽车的平顺性差的缺点,本文以此类型电动汽车前期平顺性仿真分析数据为基础,在ADAMS /Car 汽车专用模块中,通过优化前悬架弹簧刚度、后悬架弹簧刚度、前悬架减震器阻尼、后悬架减震器阻尼4个设计变量来达到对此微型旅游观光电动汽车整车质心处加权加速均方根值的优化,即对整车平顺性的优化。
1悬架刚度、阻尼参数约束条件前后悬架刚度和阻尼对汽车的平顺性有重要的影响。
汽车车身从满载位置经压缩到达最大运动位置后所经过的Z 轴方向位移f d 。
悬架的f d 设计要综合考虑其运动的限位块位置,当两者设计不合理,会降低汽车平顺性。
车轮与路面间相对动载F d 能够表现出汽车行驶时接地特性的好坏,F d 越小反应汽车接地特性越差,故其安全性能差。
故综合以上因素得出汽车悬架的以下约束条件。
1.1刚度约束改善汽车的平顺性,就要考虑悬架弹簧刚度匹配对其性能影响的优劣性。
其中,汽车前后悬架振动系统固有频率———偏频n 1、n 2决定弹簧刚度的匹配是否合理[3],即在本质上决定汽车性能是否合理。
由于现代所设计的汽车前后悬挂质量分配比大都近似为1ʒ1,即它的ε≈1,在此分配系数的条件下,前后轴上簧载质量可以假想成不互相耦合的,且在Z 轴方向是独立的运动。
由上理论分析得出前、后悬架振动固有频率公式:n 1=k 1m ()槡1/2π(1)n 2=k2m()槡2/2π(2)式中,n1,n2为前、后悬架振动固有频率;k1,k2为前、后悬架弹簧的刚度;m1,m2为前、后悬架的簧载集中质量。
对于不同用途的汽车选取设计悬架偏频大小互不相同。
在参考国内大部分汽车的基础上根据此微型观光旅游电动汽车满载时(6人ˑ65kg)选取前悬架偏频取值范围为1.00 1.45Hz,后悬架偏频取值范围为则为1.17 1.58Hz。
由式(1)和式(2)确定前后悬架弹簧刚度约束条件为:前悬架弹簧刚度取值范围:22N/mm≤k1≤45N/mm;后悬架弹簧刚度取值范围:27N/mm≤k2≤49 N/mm。
1.2阻尼约束分配前、后悬架减震器的阻尼常用阻尼比ψ来衡量振动衰减的快慢。
ψ的计算公式为:ψ=c/(2槡km)(3)式(3)中,c为阻尼系数;k为悬架刚度;m为簧载质量。
参考大多数汽车悬架系统的阻尼比ψ的实用范围为0.2 0.4。
所以根据公式(3)确定此微型观光旅游电动汽车前后悬架减震器阻尼约束条件为:前悬架减振器阻尼取值范围:1370N·s/m≤c1≤3970N·s/m;后悬架减振器阻尼取值范围:1460N·s/m≤c2≤3940N·s/m。
1.3动挠度约束从汽车满载位置起到悬架系统压缩到最大位置的运动行程即为悬架的限位行程,记做[f d]。
其中应当合理设计f d和[f d]之间位置,减少汽车撞击限位块的几率,提高汽车行驶平顺性。
对于乘用车f d 取7 9cm。
悬架动挠度标准差3σfd=[f d]时,就可以使撞击限位块的概率小于0.3%。
1.4动载荷约束车轮与地面间相对动载是随着车轮作用于地面的载荷而不断变化的,当车轮对路面的垂直压力G 和动载荷F d方向相反,大小相等时,汽车车轮对地面的压力将为零,汽车在此状态下将会失去车轮的抓地能力,驾驶员将不能控制汽车行驶方向,操纵稳定性大大降低。
车轮脱离路面的临界值应为车轮和地面间的法向作用力与静载荷的比值大于1,即Fd/G≥1,参考同类型汽车,其临界值大小计算为[Fd /G]=1=3σF d/G,一般认为车轮脱离地面的几率应小于0.15%,所以设计此微型观光旅游电动汽车的相对动载荷σfd≤1/3。
2悬架弹簧刚度、减震器阻尼优化设计正交实验设计[7]是通过利用正交实验表来对参数匹配分析实验的一种设计方法。
通过不同水平匹配组合实验寻找最优参数水平匹配。
这种方法需要较少次数的实验、效率高,通过对反应参数特点的典型实验分析来了解所有实验所反映参数特性等优点。
本文将微型旅行观光电动汽车座椅处的总加权加速均方根值作为正交实验的实验指标;以前、后悬架系统的弹簧刚度和减震器阻尼作为实验因素;以每个实验因素取值范围区间段分为三份作为实验水平。
将进行四因素正交试验,各因素均取三水平。
其实验各因素的水平分配如表1所示。
表1因素水平表水平试验因素前悬架弹簧刚度A/(N·mm-1)后悬架弹簧刚度B/(N·mm-1)前悬架减震器阻尼C/(N·s·m-1)后悬架减震器阻尼D/(N·s·m-1)122271370146023338267027003454939703940表2悬架参数正交实验计划仿真结果因素前悬架弹簧刚度A/(N·mm-1)后悬架弹簧刚度B/(N·mm-1)前悬架减震器阻尼C/(Ns·m-1)后悬架减震器阻尼D/(Ns·m-1)总加权加速度均方根值/(m·s-2)实验12227137014600.6948实验22238267027000.5875实验32249397039400.5623实验43327137027000.3618实验53338267039400.3088实验63349397014600.2273实验74527267014600.2312实验84538397027000.2195实验94549137039400.3565实验102227397039400.2594实验112238137014600.4472实验122249267027000.3129实验133327267039400.5839实验143338397014600.5360实验153349137027000.6576实验164527397027000.5293实验174538137039400.6142实验184549267014600.5467均值10.4770.4430.5220.447均值20.4460.4520.4290.445均值30.4160.4440.3890.448极差0.0610.0090.1330.003主次因素3241252科学技术与工程14卷根据国标GB /T 4970—1996《汽车平顺性随机输入行驶试验方法》[6]并考虑到此微型观光旅游电动汽车所设计的最大车速为50km /h ,所以,应使此电动汽车在6人满载的状态下,以常用车速40km /h 的速度在沥青路面(B 级路面)匀速行驶,进行悬架各组参数匹配情况下的平顺性仿真研究。
在ADAMS /Car 模块中按照下实验表修改整车动力学模型悬架弹簧刚度和减震器阻尼,根据国标GB /T 4970-1996《汽车平顺性随机输入行驶试验方法》在ADAMS /Postprocessor 中计算其优化后质心处x 、y 、z 的总加权加速的均方根值并将其转换成座椅处总加权加速度均方根值。
汽车以常用车速40km /h 的速度在沥青路面(B 级路面)匀速行驶时各种工况下仿真结果如表2所示。
根据座椅总加权加速度均方根值最小原则[4,5],由上实验结果表可以看出,A 3B 2C 3D 2的悬架参数匹配使总加权加速度均方根值为最小,即0.2195m ·s -2。
相比于优化前座椅面处总加权加速的均方根值0.622m ·s -2大大降低了,汽车的平顺性由很显著的提高。
由极差大小可以分析出,对本文中所研究的微型旅游观光电动汽车平顺性影响的主次因素依次为:前悬架减震器阻尼影响最大;前悬架弹簧刚度次之;再次为后悬架弹簧刚度;影响最小的为后悬架减震器阻尼。
在ADAMS /Postproces-sor 测量此悬架参数组合的悬架动挠度和车轮动载荷均在乘用车标准范围之内。
3优化前、后悬架参数图像对比将优化后悬架系统的参数输入到整车模型中,在ADAMS /Postprocessor 中绘制汽车以常用车速40km /h 的速度在沥青路面匀速行驶时车身质心位置加速度曲线和加速度功率谱密度曲线,并进行优化前、后曲线比较。
1)优化前后车身质心处Z 轴加速度曲线对比和其功率谱密度曲线对比如图1,图2所示。