cosa0000000000
FANUC 0i 系统参数
伺服参数:1020:轴号(88 89 90 ) 1013#1=0,IS—B设定1022 1023:轴名(1 2 3)1006#0#1=0,直线轴2020:电机号(代码)1815#1=1:使用分离脉冲编码器2021:负载惯量比3002#4=0,倍率相关的信号逻辑不变2165:放大器最大电流值1815#4=0的原因显示诊断310 311中2022:电机旋转方向(111 -111)20=4,138=7:存储卡加工有效2023: 速度脉冲数(8192)=快移速度/(60X增益)2024:位置脉冲数(12500 半闭环)全闭环:丝杠螺距/光栅尺分辨率2185:位置脉冲数转换系数(位置脉冲数〉32767时)2084:柔性进给齿轮比(分子)2085:柔性进给齿轮比(分母柔性齿轮比=电机旋转一周所需的位置脉冲/100万1010:CNC控制轴数8130:总控制轴数1820:指令倍乘比=(指令到位/检测单位)X21821:参考计数器容量1825:各轴伺服环增益1826:各轴到位宽度1827:各轴到位宽度(切削进给)1801#4:CCI切削进给时的到位宽度0:使用1826 1:专用18271828:移动中最大偏差1829:停止时最大偏差1850:栅格偏移量或参考点偏移量2000#0=1,使参数(2023 2024)的值增大10倍#1=0,进行数字伺服参数的初始设定1803#1,是否在到位极限中进行停止/移动中误差过大的检查0:进行1:不进行1804#4:在VRDY OFF忽略信号处于1的状态执行紧急停止时0:为0之前不会解除紧急停止1:解除#5=0:在检测异常负载情况下使所有轴停止并报警#6:当VRDY OFF报警忽略为1或各轴VRDY OFF为1时(0:伺服准备就绪信号SA为0 1:SA=1)1311#0=1:刚通电后的存储行程限位检测有效1300#6=0:进行手动回零前存储行程检测(1311#0=1时)1301#6=0:超程信号不向PMC输入#7:是否进行移动前行程检测0:不进行1:进行3111#0=1:显示伺服设定画面3111#5=1:予以进行操作监视显示#6=1:操作监视画面的速度表上是主轴速度0:主轴电机速度3160:MDI单元类别设定3202#0 NE8=1,禁止8000—8999程序编辑#4=1 NE9 禁止9000-9999程序编辑#6使受到保护的程序的号检索0:无效1:有效3290#7:存储器保护信号0:使用KEY1、2、3、4信号(G46。
ARTISAN

390National Instruments • Tel: (800) 433-3488•Fax: (512) 683-9300•***********•C o u n t e r /T i m e r A c c e s s o r i e s a n d C a b l e sD a t a A c q u i s i t i o n a n d S i g n a l C o n d i t i o n i n gAccessory and Cable Selection ProcessStep 1.Select your counter/timer device from Tables 1 and 2.Step ing Tables 1 and 2 as a guide,determine which accessories are appropriate for that device.Select an accessory using Table 3 as reference.Step ing Tables 1 and 2,determine the appropriate cable solution for your selected counter/timer device and accessory.AccessoriesBNC-2121 (See Figure 1)Connector block with BNC and spring terminal connections for easy connection of I/O signals to counter/timer devices.The BNC-2121 offers spring terminals,as well as eight dedicated and six user-defined BNC connectors,which provide access to all I/O signals.This connector block is also a full-featured test accessory that provides pulse-train,trigger,and quadrature encoder signals.For the connections,refer to the BNC-2121 user guide at /manualsBNC-2121......................................................................................................778289-01Dimensions – 26.7 by 11.2 by 5.5 cm (8.0 by 4.4 by 2.2 in.)CA-1000 (See Figure 2)Configurable signal connectivity solution for connecting counter/timers to different types of standard I/O connectors.You can also incorporate switches and LED indicators.You can place the CA-1000 under a laptop PC,on a benchtop,or in a 19 in.rack.CA-1000......................................................................................................See page 351Dimensions – 30.7 by 25.4 by 4.3 cm (12.1 by 10 by 1.7 in.)Counter/Timer Accessories and CablesFigure 2. CA-1000 Configurable Signal Conditioning SolutionFigure 1. BNC-2121 Connector BlockAccessory DescriptionPage BNC-2121BNC connector block with built-in test features390CA-1000Configurable connector accessory 390SCB-68Shielded screw connector block 391TB-2715Front-mount terminal block for PXI-660x391TBX-68DIN-rail connector block 391CB-68LP Low-cost screw connector block 391CB-68LPR Low-cost screw connector block 391Table 1. Accessories and Cables for PXI-6601 and PCI-6602Table 2. Accessories and Cables for PXI-6602 and PXI-6608Table 3. Overview of AccessoriesPCI-6601, PCI-6602AccessoriesCables BNC-2121, CA-1000, SCB-68,–TBX-68, CB-68LP , and CB-68LPR R6868 or SH68-68-D1TB-2715N/APXI-6602, PXI-6608AccessoriesCables BNC-2121, CA-1000, SCB-68,–TBX-68, CB-68LP , and CB-68LPR R6868 or SH68-68-D1TB-2715Connects directly to the deviceCounter/Timer Accessories and CablesSCB-68 Shielded I/O Connector Block (See Figure 3)Shielded I/O connector block for easy connection of I/O signals to the counter/timer devices.T he screw terminals are housed in a metal enclosure for protection from noise bined with a shielded cable,the SCB-68 provides rugged,very low-noise signal termination.T he SCB-68 also includes two general-purpose breadboard areas.SCB-68..............................................................................................................776844-01Dimensions – 19.5 by 15.2 by 4.5 cm (7.7 by 6.0 by 1.8 in)TB-2715 Terminal Block (See Figure 4)With the T B-2715 terminal block for PXI counter/timer devices,you can connect signals directly without additional cables.Screw terminals provide easy connection of I/O signals.The TB-2715 latches to the front of your PXI module with locking screws and provides strain relief.TB-2715............................................................................................................778242-01Dimensions – 8.43 by 10.41 by 2.03 cm (3.32 by 4.1 by 0.8 in.)TBX-68 I/O Connector Block with DIN-Rail Mounting (See Figure 5)Termination accessory with 68 screw terminals for easy connection of field I/O signals to the counter/timer devices.The TBX-68 is mounted in a protective plastic base with hardware for mounting on a standard DIN rail.TBX-68..............................................................................................................777141-01Dimensions – 12.50 by 10.74 cm (4.92 by 4.23 in.)CB-68LP and CB-68LPR I/O Connector Blocks (See Figure 6)Low-cost termination accessories with 68 screw terminals for easy connection of field I/O signals to the counter/timer devices.The connector blocks include standoffs for use on a desktop or mounting in a custom panel.T he CB-68LP has a vertically mounted 68-pin connector.The CB-68LPR has a right-angle mounted connector for use with with the CA-1000.CB-68LP............................................................................................................777145-01Dimensions – 14.35 by 10.74 cm (5.65 by 4.23 in.)CB-68LPR ........................................................................................................777145-02Dimensions – 7.62 by 16.19 cm (3.00 by 6.36 in.)391National Instruments • Tel: (800) 433-3488•Fax: (512) 683-9300•***********•Counter/Timer Accessories and CablesData Acquisition andSignal ConditioningFigure 6. CB-68LP and CB-68LPR I/O Connector BlocksFigure 5. TBX-68 I/O Connector BlockFigure 4. TB-2715 I/O Terminal BlockFigure 3. SCB-68 Shielded I/O Connector Block392National Instruments • Tel: (800) 433-3488•Fax: (512) 683-9300•***********•C o u n t e r /T i m e r A c c e s s o r i e s a n d C a b l e sD a t a A c q u i s i t i o n a n d S i g n a l C o n d i t i o n i n gCablesRTSI Bus Cables (See Figures 7 and 8)Use RT SI bus cables to connect timing and synchronization signals among measurement,vision,motion,and CAN boards for PCI.For systems using long and short boards,order the extended RTSI cable.2 boards ..........................................................................................................776249-023 boards ..........................................................................................................776249-034 boards ..........................................................................................................776249-045 boards ..........................................................................................................776249-05Extended,5 boards ........................................................................................777562-05SH68-68-D1 Shielded Cable (See Figure 9)Shielded 68-conductor cable terminated with two 68-pin female 0.050 series D-type connectors.This cable connects counter/timer devices to accessories.1 m..................................................................................................................183432-012 m..................................................................................................................183432-02R6868 Ribbon I/O Cable (See Figure 10)68-conductor flat ribbon cable terminated with two 68-pin e this cable to connect the NI PCI-6601 to an accessory.For signal integrity with high-frequency signals,use the SH68-68-D1 with the NI 6602 and NI 6608.1 m..................................................................................................................182482-01Custom Connectivity Components68-Pin Custom Cable Connector/Backshell Kit (See Figure 11)68-pin female mating custom cable kit for use in making custom 68-conductor cables.Solder-cup contacts are available for soldering of cable wires to the connector.68-pin custom cable kit ................................................................................776832-01PCB Mounting ConnectorsPrinted circuit board (PCB) connectors for use in building custom accessories that connect to 68-conductor shielded and ribbon cables.Two connectors are available,one for right-angle and one for vertical mounting onto a PCB.68-pin,male,right-angle mounting..............................................................777600-0168-pin,male,vertical mounting....................................................................777601-01Counter/Timer Accessories and CablesFigure 10. R6868 Ribbon I/O CableFigure 9. SH68-68-D1 Shielded CableFigure 8. Extended RTSI Bus CableFigure 7. RTSI Bus CableFigure 11. 68-Pin Custom Cable Kit。
Additel ADT681数字压力仪说明书

ModelADT681: Regular gaugeADT681IS: ATEX certified intrinsically safe Accuracy681(IS)-02: 0.025% of full scale 681(IS)-05: 0.05% of full scale 681(IS)-10: 0.1% of full scale 681(IS)-20: 0.2% of full scale(For detailed accuracy, please see pressure range table)Gauge TypesGauge pressure Compound pressure Absolute pressure Differential pressureFan-shaped Graph ScaleSimilar to analog dials, including pressure swing, % indication with fan-shaped graph scale for visual reference, low/high alarm.DisplayDescription: 5 full digit FSTN LCDDisplay rate: 3 readings per second (Default setting).Adjustable from 10 readings per second to 1 reading every ten secondsNumeral display height: 16.5mm (0.65")OVERVIEWGauge pressure Differential pressureWith advanced microprocessor technology and state-of-the-art silicon pressure sensors, the 681 series digital pressure gauges provide an accurate, reliable, and economic solution for a wide range of pressure applications. They are loaded with functionality and remarkably easy to use. To reach the best performance, every silicon pressure sensor in our gauges is specially aged, tested and screened before assembly. The 681 series digital pressure gauges are unmatched in performance and reliability. Best of all, they are very affordableFEATURESPressure ranges to 36,000 psi (2500 bar) 0.025% full scale accuracy (681-02) 0.05% full scale accuracy (681-05) 0.1% full scale accuracy (681-10) 0.2% full scale accuracy (681-20)Fully temperature compensated accuracy from 14°F to 122°F (-10°C to 50°C) Up to eleven selectable pressure unitsLarge, easy to read display with 5-digit resolution Backlit display% pressure indication with fan-shaped graph scale for visual referenceDisplay flash warning when pressure over 120% of FSBottom mount or panel mountATEX certified intrinsically safe (Model 681IS) NIST traceable calibration with data(included)9V battery power or AC adapter (optional)SPECIFICATIONSPressure ranges to 36,000 psi (2500 bar)0.025%, 0.05%, 0.1% or 0.2% FS accuracy% pressure indication with fan-shaped graphscale for visual referenceFully temperature compensated accuracy Panel mount gauges are availableDigital Pressure GaugesAdditel 681Pressure RangesNote: [1]. Sealed gauge pressure for above 1000 psi[2]. G=Gas, L=Liquid (please specify media type when place order) [3]. 0.025% FS for gas media onlyPressure UnitsPa, kPa, MPa, psi, bar, mbar, kgf/cm 2, inH 2O@4°C mmH2O@4°C, inHg@0°C, mmHg@0°CEnvironmentalCompensated Temperature: 14°F to 122°F (-10°C to 50°C)Operating Temperature*: 14°F to 122°F(-10°C to 50°C)*0.025%FS accuracy guaranteed only over the ambient temperature range of 68°F to 79°F (20°C to 26°C)Storage Temperature: -4°F to 158°F (-20°C to 70°C)Humidity: <95%SPECIFICATIONS681 with rubber bootSPECIFICATIONSORDERING INFORMATIONPressure Port1/4NPT male, 1/4BSP male, M20×1.5 male (≤15,000 PSI)1/4HP female or 1/4HP male(≥15,000 PSI)*1/4HP female: Autoclave F-250-C, 9/16" - 18 UNF-2B *1/4HP male: Autoclave M-250-C, 9/16" - 18 UNF-2A0.236 inch (Ø6 mm) test hose (for differential pressure)Other connections available per requestPowerBattery: One 9V alkaline battery (included)Battery life: 300 hours (10 readings/s), 600 hours (3 reading/s), or 6000 hours (1 reading/10s)Power auto-off: 60 minutes power auto-off. Auto-off may be disableExternal power: 110/220V external power adapter (optional)*(Do not use the external power adapter in a hazardous atmosphere)Model NumberModel:ADT681ADT681ISAccuracy:02-0.025% of full scale 05-0.05% of full scale 10-0.1% of full scale 20-0.2% of full scaleRange type:PSI-range by psi BAR-range by bar H 2O-range by inH 2OPressure port type:N- 1/4NPT male N2- 1/2NPT male B-1/4BSP male M-M20X1.5 maleAF-Autoclave F-250-C female AM-Autoclave M-250-C malePressure range P/N:See pressure range table PB:Panel mount with back pressure portEnclosureCase material: Aluminum alloy Wetted parts: 316L SS Dimension:Ø110mm X 35mm depth X 176mm height(panel mount gauge: Ø140mm X 86mm depth)Weight: 0.6kgIntrinsic Safety and European Compliance CE markedATEX certified intrinsically safe (ADT681IS)Communication: RS232*(Do not use the RS-232 connector in a hazardous atmosphere)Warranty: 1 yearAccessories includedRubber boot (Except panel mount gauges)9V alkaline battery (1 pc)ManualNIST traceable calibration certificateOptional AccessoriesGP300PSI PB02N 681 Panel mount with back pressure port。
交流接触器结构创新与智能控制技术综述
交流接触器结构创新与智能控制技术综述!周煜源,刘向军(福州大学电气工程与自动化学院,福建福州350108)摘要:交流接触器是保证配电系统及低压控制系统安全和稳定运行的重要控制 电器之一。
提升交流接触器工作性能和经济指标,以满足日益提高的市场需求成为重 要的研究方向。
交流接触器研究 , 和工作性能岀发,就交流接触器的 优化与创新及智能化方面,总 目前交流接触器相关的新技术和研究方案,理和应用场合。
,交流接触器 的发展趋势进行了展望。
关键词:交流接触器;结构创新;结构优化;智能控制中图分类号:TM 572.2 文献标志码:3 文章编号:2095-8188(2021)02-0001-07DOI : 10.16628/j. cnki. 2095-8188. 2021.02. 001周煜源(1994―),男,硕士研究生,研究方向为电机与电器。
Overview of Structure Innovation and Intelligent ControlTechnology of AC ContactorZHOU Yuyuan , LIU Xiangjun(College of Electrical Engineering and Automation ,Fuzhou University ,Fuzhou 350108,China )Abstract : AC contactos is one of the importani control appliances to ensurs the safe and stable operation of powcs distribution system and low voltage control system. Improving the working performance and economicindicators of AC contactors to meet the increasing market demand has become an important research direction. Inthis papes ,the research status of AC contactos at home and abroad is summarized. Based on the tructuro andworking performanco of AC contactor ,the new technology and research scheme ao summarized in terms of structurooptimization ,structure innovation and intellectualization ,and itr principte and application are illustrated in detaii.Finally,the future development trend of AC contactor is prospected.Key worUt : AC contactor ; structurr ienovation ; structural optimization ; intelligent control0引言电大以及智能电网的发展,对低压电器的性能指标提 高的要求,也为低压电器的发展为 的发展 ,是 应用 电力控制系统中的交流接触器(1-)。
阿尔法6000功能代码表MicrosoftWord文档
阿尔法6000功能代码表MicrosoftWord文档阿尔法6000功能代码表注意:“○”运行中参数可更改;“×”运行中参数不可更改*”实际检测值或固定参数,不可更改;“-”厂家设定,用户不可改。
P0:基本参数菜单显示模式0:标准菜单1:校验模式菜单0 0100控制方式0:V/F控制1:闭环矢量控制2:开环矢量控制3:V/F分离控制(闭环矢量控制方式只在__00V系列有效)2 ×0101频率数字设定0~最大频率0.00Hz 0102频率设定源10:NULL 1:频率数字设定,数字旋钮调节2:端子AI1 3:端子AI2 4:端子AI3(3004GB及以下保留)5:脉冲输入6:通讯给定7:线速度(保留)8:多段速度9:端子UP/DOWN10:程序定时运行(PLC) 11:PID12:摆频运行(保留)频率源为0~7时若多段速端子有效按“多段速度”处理1 ×0103频率设定源20~8(与P0.03一致)9:转矩差补偿量此频率源无多段速端子优先机制0 ×0104频率设定组合10:频率设定源1 1:频率设定源22:MIN(频率设定源1,频率设定源2)3:MAX(频率设定源1,频率设定源2)4:频率设定源1 + 频率设定源25:频率设定源1 - 频率设定源26:频率设定源1×频率设定源27:频率设定源1÷频率设定源28:|频率设定源1 - 频率设定源2|9:频率设定源2×(最大输出频率+频率设定源1)÷ 最大输出频率0 ×0105频率设定组合20~9,同上在定义了FC端子且端子有效时有效0 × 0106阿尔法6000功能代码表运行命令给定方式设定0:键盘控制1:端子控制1(STOP键无效)2:端子控制2(STOP键有效) 3:串行通讯1(STOP键无效) 4:串行通讯2(STOP键有效) 5:端子控制3(STOP、JOG键无效)0 0107键盘方向设定0:正转1:反转0 0108基本频率3004GB及以下:0.10~650.0Hz35R5GB及以上:0.10~400.0Hz50.00Hz × 0109最大输出频率3004GB及以下:MAX[50.00Hz,上限频率,设定频率,多段频率,跳跃频率]~650.0Hz35R5GB及以上:MAX[50.00Hz,上限频率,设定频率,多段频率,跳跃频率]~400.0Hz50.00Hz ×010A上限频率源0:数字设定1:端子AI1 2:端子AI23:端子AI3 (3004GB及以下保留)4:脉冲输入5:通迅给定0 ×010B上限频率MAX[下限频率、点动频率、UP/DN给定幅值、休眠阀值]~最大频率50.00Hz ○ 010C上限频率偏Z0.00Hz~上限频率0.00Hz ○ 010D电机额定电压60~480V 额定电压* 010E下限频率0.00Hz~上限频率0.00Hz ○ 010F最大输出电压60~480V 额定电压× 0110旋钮调整速率阿尔法6000功能代码表0:数字旋钮积分调节(1~250)×(0.01Hz/1rpm) 旋钮调整速率50 × 0111加速时间1功率≤132kW 0.1~3600s功率≥160kW 1.0~3600s22kW及以下:6.0s其它:20.0s○0112减速时间1功率≤132kW 0.1~3600s功率≥160kW 1.0~3600s22kW及以下:6.0s其它:20.0s○0113P1:启停控制启动方式0:从启动频率启动1:先制动(励磁),再从启动频率启动2:转速追踪(需接PG或转速跟踪板,3004GB及以下不支持转速跟踪板) 注:启动过程包括第一次上电、瞬停后的供电恢复、外部故障复位、自由停车后的一切启动过程0 ○ 0200启动频率60.00Hz 0.50Hz ○ 02010.0~10.0s 0.0s ○ 0202启动直流制动电流依机型确定0~100.0%电机额定电流。
关于智能卡cos指令错误状态返回码

SW含义
6400状态标志位未变
6581内存失败
6982不满足安全状态
6984引用数据无效
6987安全报文数据项丢失
6988安全报文数据项不正确
6A86参数P1P2不正确
6A88未找到引用数据
9303应用已被永久锁定
6700Lc不正确
6983认证方法(个人密码)锁定
6A81不支持此功能
6Cxx长度错误xx表示实际长度
6F00数据无效
6882不支持安全报文
6985不满足使用条件
6A80数据域参数不正确
6981命令与文件结构不相容6986不满足命令执行的条件(非当前EF) 6A82未找到文件
6B00参数错误(偏移地址超出了EF) 6A83未找到记录
6A84文件中存储空间不够
6D00INS不支持或错误
6E00CLA不支持或错误
63Cx验证失败,还剩下x次尝试机会6901命令不接受(无效状态) 9302MAC无效
9301金额不足
9406所需MAC和TAC不可用
9401金额不足
9402交易计数器达到最大值9403密钥索引不支持
9408应用灰锁锁定
6900不能处理
6F01公钥不完整
6F08KFL(密钥格式列表)长度不正确6F81系统错误。
AMKASYN AC Servo和主轴电机:一般技术数据说明书

AMKASYNAC Servo and Main Spindle MotorsGeneral technical dataVersion: Part-No.: 2002/22 27853About this documentationName: PDK_027853_Motoren_Uebersicht_enWhat has changed:Copyright notice: © AMK GmbH & Co. KGCopying, communicating, and using the contents of this documentation is not permitted,unless otherwise expressed. Offenders are liable to the payment of damages. All rights arereserved in the event of the grant of a patent or the registration of a utility model or design.Reservation: We reserve the right to modify the content of the documentation as well as to the deliveryoptions for the product.Publisher: AMK Arnold Müller Antriebs- und Steuerungstechnik GmbH & Co. KGGaußstraße 37 – 39,73230 Kirchheim/TeckTel.: 07021/5005-0,Fax: 07021/5005-176E-Mail:********************Dr.h.c. Arnold Müller, Eberhard A.Müller, Dr. Günther VogtRegistergericht Stuttgart HRB 231283; HRA 230681Service: Phone: +49/(0)7021 / 5005-191, Fax -193Office hours: Mo-Fr 7.30 - 16.30, on weekends and holidays, the telephone number of theon-call service is provided through an answering machine. .You can assist us in finding a fast and reliable solution for the malfunction by providing ourservice personnel with the followingInformation located on the ID plate of the devicesthe software versionthe device setup and applicationthe type of malfunction, suspected cause of failurethe diagnostic messages (error messages)Internet address: www.amk-antriebe.deContent1 AMKASYN Motor Series DS, DV, DH and DW 41.1 Short description 42 General technical data 53 Technical Data Holding brake and External fan 63.1 Holding brake 63.2 External fan 64 Motor connection 74.1 Terminal box types and terminal block wiring 74.2 Connector types 84.3 Dimensions of the motor connector and connection wiring 85 Motor encoders 106 Abbreviations 127 Important notes 138 AMK Motor type codes 141 AMKASYN Motor Series DS, DV, DH and DW1.1 Short descriptionThe AMKASYN series of motors consits of the compact, highly dynamic AC-servo motor types DS and DV as well as the heavy-duty AC main spindle motor types DH and DW with high power density and precision balanced rotors.The AMKASYN motors are optimally tuned to be used with the AMKASYN digital AC-servo inverters for multi-motor applications in the power range of 1.3 to 75 kVA and with the AMKASYN digital compact servo drive in the power range of 0.7 to 50 kVA. Together the motors and inverters form an intelligent, digital drive system for servo and main spindle applications, which satisfies every demand.Advantages of the AMKASYN motor series Maintenance-freeSturdyPowerfulCompactHigh efficiencyOptimum power to weight ratiohighly dynamic responseHigh overload capacityWinding temperature sensors asprotection against overloadIntegrated encoder for speed andposition controlAreas of applicationThe AMKASYN motors are especially suitable for use as servo and main drive motors in: Plant construtionElevator technologyPrinting machinesWoodworking machinesPlastic processing machinesWarehousing and conveyortechnologyTest standsProcess engineeringTextile machinesPackaging machinesMachine tools2 General technical dataAmbient temperature: +5 ... +40°C / 94°F. At higher ambient temperatures up to maximum 60°C / 140°F the ratingdata must be reduced by 1% per 1° Kelvin temperature rise.Installation altitude: Up to 1000m / 3281ft above sea level. In operation above 1000m / 3281ft altitude, ambienttemperatures corresponding to DIN VDE 0530 table 4 shall be used as basis.Humidity: Maximum 85% relative humidity, non-condensating.Degree of protection: IP 54. Higher degree of protection on request.The stated maximum speeds apply for the IP 54 version with seal ring.Rating data: Refer to 100 Kelvin temperature rise in the windings. The test motor is mounted using athermally insulating flange.Insulating material class: F according to DIN VDE 0530.Thermal protection: PTC resistor, cold resistance approx. 150-800 Ω.Bearings: Ball bearings, lifetime lubricated.Axial eccentricity run-out: N according to DIN 42955.Balancing grade: G 2,5 corresponding to VDI 2056.Vibrational grade: N according to DIN ISO 2373.Painting: RAL 9005, flatt black.Cooling: Non-ventilated or fan-cooled; airflow toward output shaft. Reverse airflow as option.3 Technical Data Holding brake and External fan 3.1 Holding brakeThe motors can be equipped optionally with holding brakes. These are not suitable as service brakes. The brakes are lifted with 24V DC input. In the case of changed operating conditions, the operating instructions of the brake manufacturer must beobserved.For the maximum speed of the motor the maximum speed of the brake must also be considered.3.2 External fan4 Motor connectionDV, DH and DW motors feature terminal box connections for motor leads, fan and holding brake. The motors of the DS series and optionally of the DV series feature plug-style connectors. Connection cables with the corresponding cross-sections can be purchased preassembled.Shielded cables must be used for EMC reasons.* The current values IL for the connection cable refer to applications according to EN 60204-1:1992 in the cable laying type B2, or according to DIN 46200 for connection bolts.KG 1and KG 3 KG 4 and KG 5Picture name: ZCH_Motoren_Klemmkasten4.2 Connector types* The current values IL for the connection cable refer to applications according to EN 60204-1: 1992 in the cable laying type B24.3 Dimensions of the motor connector and connection wiringConnector pin designation is true for view on to the motor connector socket in each case. Power connection size BG 1picture name: ZCH_Motoren_Leistungsstecker1.0picture name: ZCH_Motoren_Leistungsstecker1.0_querPower connection size BG 1,5picture name: ZCH_Motoren_Leistungsstecker1,5picture name: ZCH_Motoren_Leistungsstecker1.5_querSocket and connector for external fanpicture name: ZCH_Motoren_Einbaudosepicture name: ZCH_Motoren_Anschlussstecker5 Motor encodersThe motors are equipped with one of these encoders.The motor maximum speed can be limited additionally by the encoder !picture name: ZCH_Motoren_Einbausteckdose_MotorgeberSignal description6 AbbreviationsMotor tables Holding brakeCharacter Unit Description Character Unit DescriptionM0Nm Zero speed torque M Br Nm Holding torqueM N Nm Rated torque n maxBR1/min Brake maximum speed P N kW Rated power U Br V Rated voltage 24V ≅n N 1/min rated speed (unregulated)n F1/min speed limit for constant rated power I BrJ Br Akgm2Brake rated currentBrake moment of interian max 1/min Maximum speed m Br kg Weight of the brake, total U N V Rated voltage motor weight is m + M BR I N A Rated currentJ kgm2 Rotor inertiam kg Motor weightkT Nm/A torque constant(M=I*kT) External fanQ I/min Rated flow rate Character Unit DescriptionΔT K Temperature rise of the liquid atpoint of rated operation U FI FVAExternal fan rated voltageExternal fan rated currentL Br mm Length of motor including brakeL1 Br mm Length of fan cooled motor includingbrake7 Important notesMotors can reach surface temperatures above 100°C / 212°F during operation. Before touching the motor check the surface temperature to avoid injury.In the case of motors with keyways and freely rotating shaft ends, the key must be removed or secured against being thrown off.Before opening the terminal box or pulling out or plugging in a connector on the motors, ensure that there is no voltage at the termination end. Voltage can be present a the connections even when the motor is not moving. If not complied with injuries or death may occur.A low-resistance connection of the motor housing to the PE ground bus in the control cabinet is required for trouble freeand safe operation of the motors.Pounding or uncontrolled impact of force onto the motor shaft during transport, storage and installation of the motors in the machine can lead to damage of the bearings and shaft.Inadmissible axial and radial loads lead to reduction of the bearing life. Bearing load diagrams are available on request.When using couplings, attention to correct assembly of the coupling components has to be observed. Alignment errors or offset of the coupling can lead to premature destruction of bearings and of the coupling.All motors listed may not be connected directly to the main power lines. The motors are intended exclusively foroperation on AMK inverter systems.8 AMK Motor type codespicture name: ZCH_Motoren_Typenschluessel_DVAMK Arnold Müller GmbH & Co. KG Antriebs- und Steuerungstechnik Gaußstrasse 37-3973230 Kirchheim/Teck DEUTSCHLANDTelefon: +49 (0) 70 21 / 50 05-0 Telefax: +49 (0) 70 21 / 50 05-199 ********************www.amk-antriebe.de。
ACS510ABB变频器故障代码
AUTOCHANGE
•
PFC INTERLOCK
PFC
•
•
PID SLEEP
PID
•
START ENABLE 1
MISSING
•
1
• •
START ENABLE 2
MISSING
•
2
• •
EMERGENCY STOP
31 AUTOMATIC RESET
PFC
81 48 "
: PFC
"
PFC
PFC (
•
(0308 0309)
67
03 FB
•
•
"
"
•
198 "
"
1
OVERCURRENT
•
•
(
ACCELER TIME 2
2202 ACCELER TIME 1 2)
•
1 2205
2
DC OVERVOLT
DC
•
• TIME 2
( 2203 DECELER TIME 1 2)
1
2206 DECELER
•
(
)
•
(
2005)
3
DEV OVERTEMP
R1 R4 115 癈
R5/R6 125 癈
• • • • •
4
SHORT CIRC
•
•
5
6
DC UNDERVOLT
DC
•
•
•
7
AI1 LOSS
1
3021 AI1FLT LIMIT (AI
)
AI1 •
•
FANUC-0系统报警代码表

之袁州冬雪创作FANUC-0系统报警代码表 1. 程序报警(P/S报警)报警号报警内容000 修改后须断电才干生效的参数,参数修改完毕后应该断电.001 TH报警,外设输入的程序格式错误.002 TV报警,外设输入的程序格式错误.003 输入的数据超出了最大允许输入的值.参考编程部分的有关内容.004 程序段的第一个字符不是地址,而是一个数字或“-”.005 一个地址后面跟着的不是数字,而是别的一个地址或程序段竣事符.006 符号“-”使用错误(“-”出现在一个不允许有负值的地址后面,或持续出现了两个“-”).007 小数点“. ”使用错误.009 一个字符出现在不克不及够使用该字符的位置.010 指令了一个不克不及用的G代码.011 一个切削进给没有被给出进给率.014 程序中出现了同步进给指令(本机床没有该功能).015 企图使四个轴同时运动.020 圆弧插补中,起始点和终点到圆心的间隔的差大于876号参数指定的数值.021 圆弧插补中,指令了不在圆弧插补平面内的轴的运动.029 H指定的偏置号中的刀具抵偿值太大.030 使用刀具长度抵偿或半径抵偿时,H指定的刀具抵偿号中的刀具抵偿值太大.033 编程了一个刀具半径抵偿中不克不及出现的交点.034 圆弧插补出现在刀具半径抵偿的起始或取消的程序段.037 企图在刀具半径抵偿模态下使用G17、G18或G19改变平面选择.038 由于在刀具半径抵偿模态下,圆弧的起点或终点和圆心重合,因此将发生过切削的情况.041 刀具半径抵偿时将发生过切削的情况.043 指令了一个无效的T代码.044 固定循环模态下使用G27、G28或G30指令.046 G30指令中P地址被赋与了一个无效的值(对于本机床只能是2).051 自动切角或自动圆角程序段后出现了不成能实现的运动.052 自动切角或自动圆角程序段后的程序段不是G01指令.053 自动切角或自动圆角程序段中,符号“,”后面的地址不是C或R.055 自动切角或自动圆角程序段中,运动间隔小于C或R的值.060 在顺序号搜索时,指令的顺序号没有找到.070 程序存储器满.071 被搜索的地址没有找到,或程序搜索时,没有找到指定的程序号.072 程序存储器中程序的数量满.073 输入新程序时企图使用已经存在的程序号.074 程序号不是1~9999之间的整数.076 子程序调用指令M98中没有地址P.077 子程序嵌套超出三重.078 M98或M99中指令的程序号或顺序号不存在.085 由外设输入程序时,输入的格式或波特率不正确.086 使用读带机/穿孔机接口停止程序输入时,外设的准备信号被关断.087 使用读带机/穿孔机接口停止程序输入时,虽然指定了读入停止,但读过了10个字符后,输入不克不及停止.090 由于间隔参考点太近或速度太低而不克不及正常执行恢复参考点的操纵.091 自动运转暂停时(有剩余移动量或执行辅助功能时)停止了手动返回参考点.092 G27指令中,指令位置到达后发现不是参考点.100 PWE=1,提示参数修改完毕后将PWE置零,并按RESET键.101 在编辑或输入程序过程中,NC刷新存储器内容时电源被关断.当该报警出现时,应将PWE置1,关断电源,再次打开电源时按住DELETE 键以清除存储器中的内容.131 PMC报警信息超出5条.179 597号参数设置的可控轴数超出了最大值.224 第一次返回参考点前企图执行可编程的轴运动指令. 2. 伺服报警报警号报警内容400 伺服放大器或电机过载.401 速度节制器准备号信号(VRDY)被关断.404 VRDY信号没有被关断,但位置节制器准备好信号(PRDY)被关断.正常情况下,VRDY和PRDY信号应同时存在.405 位置节制系统错误,由于NC或伺服系统的问题使返回参考点的操作失败.重新停止返回参考点的操纵.410 X轴停止时,位置误差超出设定值.411 X轴运动时,位置误差超出设定值.413 X轴误差寄存器中的数据超出极限值,或D/A转换器承受的速度指令超出极限值(能够是参数设置的错误).414 X轴数字伺服系统错误,检查720号诊断参数并参考伺服系统手册.415 X轴指令速度超出511875检测单位/秒,检查参数CMR.416 X轴编码器故障.417 X轴电机参数错误,检查8120、8122、8123、8124号参数.420 Y 轴停止时,位置误差超出设定值.421 Y轴运动时,位置误差超出设定值.423 Y轴误差寄存器中的数据超出极限值,或D/A转换器承受的速度指令超出极限值(能够是参数设置的错误).424 Y轴数字伺服系统错误,检查721号诊断参数并参考伺服系统手册.425 Y轴指令速度超出511875检测单位/秒,检查参数CMR.426 Y轴编码器故障.427 Y轴电机参数错误,检查8220、8222、8223、8224号参数.430 Z轴停止时,位置误差超出设定值.431 Z轴运动时,位置误差超出设定值.433 Z轴误差寄存器中的数据超出极限值,或D/A转换器承受的速度指令超出极限值(能够是参数设置的错误).434 Z轴数字伺服系统错误,检查722号诊断参数并参考伺服系统手册.435 Z轴指令速度超出511875检测单位/秒,检查参数CMR.436 Z轴编码器故障.437 Z轴电机参数错误,检查8320、8322、8323、8324号参数. 3. 超程报警报警号报警内容510 X轴正向软极限超程.511 X轴负向软极限超程.520 Y轴正向软极限超程.521 Y轴负向软极限超程.530 Z轴正向软极限超程.531 Z轴负向软极限超程. 4. 过热报警及系统报警700号报警为NC主印刷线路板过热报警,704号报警为主轴过热报警.其它的6××为PMC系统报警,9××为NC系统报警.用户如发现以上两种报警,请及时通知我们或直接向FANUC公司咨询,以便接洽维修.2×××为机床报警。
爱斯顿MPNC404YEAXX2A 型号的爱斯顿Magnum低压电源电路保护器说明书
Eaton MPNC404YEAXX2AEaton Magnum low voltage power circuit breaker, Magnum PXR,Double narrow frame, 4000 A (NNABCABC), 100 kA, Four-pole,Drawout horizontal with motorized racking (without clusters)mounting, PXR20 LSI trip unitGeneral specificationsEaton Magnum low voltage power circuitbreakerMPNC404YEAXX2A78668961624316.3 in16.8 in32.4 in177 lbNEMA Compliant SABA Listed CCC MarkedCE Marked CSA CertifiedANSIKEMA CertifiedLloyd's Register Certified UL ListedABS CertifiedDNV GL CertifiedProduct Name Catalog NumberUPCProduct Length/Depth Product Height Product Width Product Weight Compliances CertificationsApplication notesZone selective interlocking application paperBrochuresMagnum circuit breakers with Power Xpert Release trip units product aidCatalogsSelevctive coordination application paper - IA0120000E3Certification reportsMagnum PXR and PD-SB double and double narrow frame UL Certificate of ComplianceMagnum PXR and PD-SB standard and narrow frame UL Certificate of ComplianceManuals and user guidesMicrosoft Word - Power Xpert Protection Manager Quick StartGuide.docxMagnum PXR low voltage power circuit breakers user manualPower Xpert Release trip unit for Magnum PXR circuit breakers PXR20/25 user manualSoftware, firmware, and applicationsPower Xpert Protection Manager x32 22.06 1Power Xpert Protection Manager x64 22.6 1Specifications and datasheetsEaton Specification Sheet - MPNC404YEAXX2ALow voltage circuit breakers guide specTime/current curvesMagnum PXR 20/25 electronic trip units time current curvesWhite papersCyber security white paperSafer by design: arc energy reduction techniquesMolded case and low-voltage power circuit breaker healthEaton Corporation plc Eaton House30 Pembroke Road Dublin 4, Ireland © 2023 Eaton. All Rights Reserved. Eaton is a registered trademark.All other trademarks areproperty of their respectiveowners./socialmedia。
atoi十进制最大值 -回复
atoi十进制最大值-回复问题:什么是atoi十进制最大值?解答:atoi(Ascii to Integer)是一个函数,用于将字符串转换为对应的整数。
在atoi函数中,针对输入的字符串,会判断其中的每个字符,并根据ASCII 码表的规定,将其转换为对应的整数。
atoi函数会从字符串的起始位置开始解析,直到遇到一个非数字字符,或者字符串结束为止。
而atoi十进制最大值,则是指在使用atoi函数转换字符串为整数时,整数的取值范围的上限。
在C语言中,整数的数据类型为int,其取值范围在不同的编译环境下有所不同。
然而,在大多数编译环境下,int的取值范围通常被限制在-2,147,483,648到2,147,483,647之间。
为了更好地理解atoi十进制最大值,让我们一步一步地进行探究。
第一步:了解ASCII码表为了正确地转换字符串为整数,我们需要了解ASCII码表。
ASCII (American Standard Code for Information Interchange,美国信息交换标准代码)是一种用于对英语字符进行编码的字符集。
在ASCII码表中,每个字符都有一个对应的整数值。
例如,字符'0'对应的整数值为48,字符'A'对应的整数值为65。
第二步:理解atoi函数的工作原理当调用atoi函数时,它会从字符串的起始位置开始解析,并判断每个字符的ASCII值,直到遇到一个非数字字符或者字符串结束。
在解析每个数字字符时,atoi函数会将其对应的ASCII值减去字符'0'的ASCII值得到一个整数值,并将其累积计算为最终的整数结果。
第三步:限制条件在C语言中,int类型的数据通常使用32位进行存储。
根据这个限制条件,int的取值范围被限制在-2,147,483,648到2,147,483,647之间。
当atoi 函数转换一个字符串为整数时,如果结果超出了int的取值范围,则会导致数据溢出,结果将不再是预期的整数值。
granafa避免除数为0的方法
Granafa是一款流行的开源数据可视化工具,它可以帮助用户快速地分析和展现复杂的数据。
在使用Granafa的过程中,我们经常会遇到一些小问题,比如除数为0的情况。
本文将为大家介绍如何在Granafa中避免除数为0的方法。
1. 理解除数为0的含义在进行数据分析和可视化的过程中,我们经常会进行除法运算,而除数为0是一个常见的问题。
在数学中,除数为0是一个未定义的情况,它表示我们无法进行这样的除法运算。
在数据可视化中,如果我们的除数为0,就表示我们的数据处理存在问题,我们需要及时地进行修正和处理。
2. 使用IF函数进行条件判断在Granafa中,我们可以使用IF函数来进行条件判断,进而避免除数为0的情况。
IF函数的语法比较简单,它可以根据指定的条件返回不同的数值。
我们可以利用IF函数来判断除数是否为0,如果为0,则返回一个默认值,避免除数为0的情况。
3. 使用CASE WHEN语句进行条件分支处理除了IF函数,我们还可以使用CASE WHEN语句进行条件分支处理。
CASE WHEN语句可以根据不同的条件返回不同的结果,非常灵活。
我们可以在使用除法运算时,先判断除数是否为0,如果为0,则返回一个默认值,从而避免除数为0的情况。
4. 使用COALESCE函数处理NULL值在数据处理过程中,我们经常会遇到NULL值的情况。
在Granafa中,我们可以使用COALESCE函数来处理NULL值,进而避免除数为0的情况。
COALESCE函数可以接受多个参数,返回其中第一个非NULL的数值。
我们可以利用COALESCE函数来处理可能出现的NULL值,从而确保除法运算的正确性。
5. 数据清洗和预处理除了在数据可视化工具中进行处理,我们还可以在数据清洗和预处理阶段就避免除数为0的情况。
在进行数据清洗和预处理时,我们可以对可能出现除数为0的情况进行检查和处理,确保数据的质量和准确性。
总结:在Granafa中避免除数为0的方法包括理解除数为0的含义、使用IF 函数进行条件判断、使用CASE WHEN语句进行条件分支处理、使用COALESCE函数处理NULL值以及数据清洗和预处理。
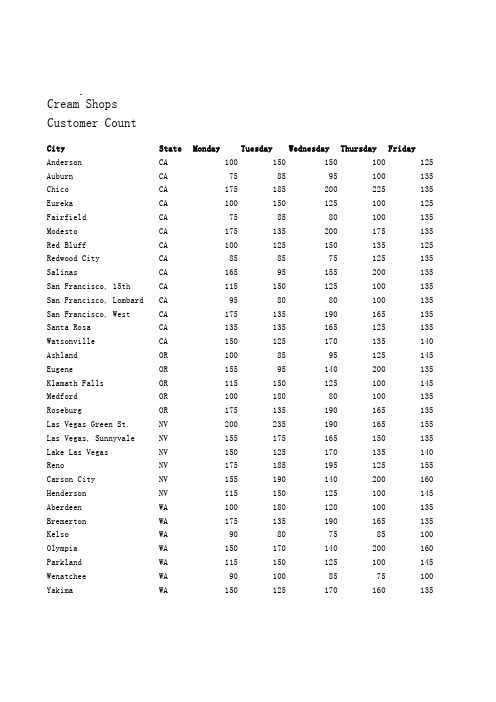
CustCount
All Over 150 on on Weekend? FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE FALSE TRUE FALSE FALSE TRUE FALSE FALSE FALSE FALSE FALSE TRUE FALSE FALSE FALSE
Saturday 175 150 175 135 150 175 140 185 185 145 150 175 130 140 185 185 150 150 175 250 230 140 185 185 170 130 175 125 175 170 125 170
Sunday 195 100 150 150 100 150 195 100 150 150 100 160 150 200 175 150 150 100 160 200 150 200 175 150 180 100 160 115 180 180 100 160
Sunday>150? TRUE FALSE TRUE TRUE FALSE TRUE TRUE FALSE TRUE TRUE FALSE TRUE TRUE TRUE TRUE TRUE TRUE FALSE TRUE TRUE TRUE TRUE TRUE TRUE TRUE FALSE TRUE FALSE TRUE TRUE FALSE TRUE
Any Over 150 on on Weekend? TRUE FALSE TRUE FALSE FALSE TRUE TRUE TRUE TRUE FALSE FALSE TRUE FALSE TRUE TRUE TRUE FALSE FALSE TRUE TRUE TRUE TRUE TRUE TRUE TRUE FALSE TRUE FALSE TRUE TRUE FALSE TRUE
PMAC回零编程代码
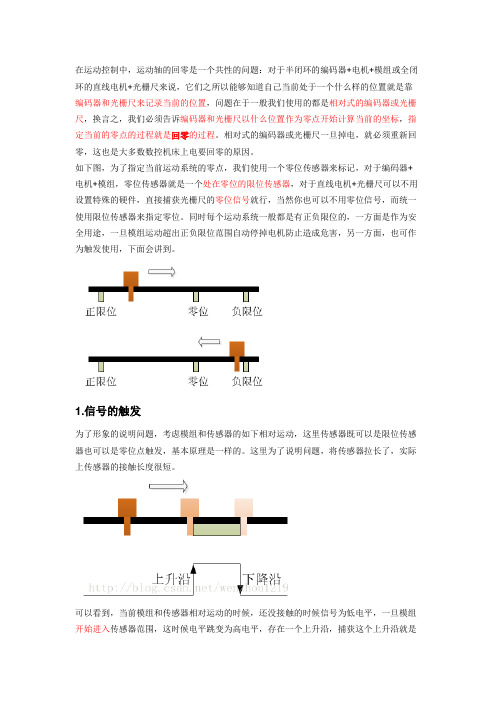
在运动控制中,运动轴的回零是一个共性的问题:对于半闭环的编码器+电机+模组或全闭环的直线电机+光栅尺来说,它们之所以能够知道自己当前处于一个什么样的位置就是靠编码器和光栅尺来记录当前的位置,问题在于一般我们使用的都是相对式的编码器或光栅尺,换言之,我们必须告诉编码器和光栅尺以什么位置作为零点开始计算当前的坐标,指定当前的零点的过程就是回零的过程。
相对式的编码器或光栅尺一旦掉电,就必须重新回零,这也是大多数数控机床上电要回零的原因。
如下图,为了指定当前运动系统的零点,我们使用一个零位传感器来标记,对于编码器+电机+模组,零位传感器就是一个处在零位的限位传感器,对于直线电机+光栅尺可以不用设置特殊的硬件,直接捕获光栅尺的零位信号就行,当然你也可以不用零位信号,而统一使用限位传感器来指定零位。
同时每个运动系统一般都是有正负限位的,一方面是作为安全用途,一旦模组运动超出正负限位范围自动停掉电机防止造成危害,另一方面,也可作为触发使用,下面会讲到。
1.信号的触发为了形象的说明问题,考虑模组和传感器的如下相对运动,这里传感器既可以是限位传感器也可以是零位点触发,基本原理是一样的。
这里为了说明问题,将传感器拉长了,实际上传感器的接触长度很短。
可以看到,当前模组和传感器相对运动的时候,还没接触的时候信号为低电平,一旦模组开始进入传感器范围,这时候电平跳变为高电平,存在一个上升沿,捕获这个上升沿就是模组刚刚进入传感器范围的时刻。
模组继续运动,一旦模组完全离开传感器范围,这时候电平跳变为低电平,存在一个下降沿,捕获这个下降沿就是模组刚刚完全离开传感器范围的时刻。
因为最开始的时候没有回零,这时候模组是不知道自己当前到底处于什么位置的,但是在高低电平跳变的时候会发送中断,我们可以捕获这两个中断从而判断当前模组是否运动到指定的位置,从而将当前指定位置标记为零点。
2.回零策略上面其实已经叙述了最基本的思想:利用信号触发的上下沿来通知PMAC是否已经运动到指定位置,从而将当前模组在的位置标记为相对零点。
PSP游戏GTA血战唐人街金手指
PSP游戏 GTA血战唐人街金手指_S ULES-01347_G GTA血战唐人街_C0 Max Cash_L 0x20F83774 0x05F5E0FF_L 0x20F83778 0x05F5E0FF_C0 Infinite Health_L 0x00F82B06 0x000000FF_C0 Infinite Armor_L 0x00F82B07 0x000000FF_C0 Infinite Run_L 0x6040D160 0x00000000_L 0x00020001 0x000001C8# <*Wanted Level Codes*>_C0 Max Wanted Level_L 0x202BCC5C 0x24020006_C0 No Wanted Level_L 0x202BCC5C 0x24020000_C0 Disable Wanted Level Codes_L 0x202BCC5C 0x8C820000# <*Car Damage Codes*>_C0 Player Car has Infinite Health_L 0x20268318 0x0A200800_L 0x20002000 0x240900FF_L 0x20002004 0xA08903E1_L 0x20002008 0x0A29A0C8_L 0x2000200C 0x908403E3_C0 Player Car is on Fire_L 0x20268318 0x0A200800_L 0x20002000 0x2409000F_L 0x20002004 0xA08903E1_L 0x20002008 0x0A29A0C8_L 0x2000200C 0x908403E3_C0 Player Car is Smoking_L 0x20268318 0x0A200800_L 0x20002000 0x24090020_L 0x20002004 0xA08903E1_L 0x20002008 0x0A29A0C8_L 0x2000200C 0x908403E3_C0 Disable Car Damage Codes _L 0x20268318 0x908403E3# <*Weapon Codes*>_C0 One Hit Kill_L 0x20000050 0x3C0808C1_L 0x20000054 0x0A26650D_L 0x20000058 0x8D08D260_L 0x2019942C 0x0A200014_L 0x20199438 0x15050007_C0 Disable One Hit Kill_L 0x2019942C 0x00C7402B_L 0x20199438 0x15000007_C0 Infinite Ammo_L 0x2006A4A8 0x00000000_L 0x2006A4B4 0x00000000_L 0x2006A4E8 0x00000000_C0 Disable Infinite Ammo_L 0x2006A4A8 0x00B02823_L 0x2006A4B4 0x00902023_L 0x2006A4E8 0x00902023_C0 Rapid Fire_L 0x2013E450 0x24840000_L 0x202C65CC 0x20800013_C0 Disable Rapid Fire_L 0x2013E450 0x2484FFFF_L 0x202C65CC 0x1C800013_C0 Explosive Handgun Bullets _L 0x00F829ED 0x00000001_C0 Normal Handgun Bullets_L 0x00F829ED 0x00000000# <*Walking Speed Codes*>_C0 Normal Walk Speed_L 0x2034C9D4 0x10001000_C0 Quicker Walk Speed_L 0x2034C9D4 0x14001400_C0 Much Quicker Walk Speed _L 0x2034C9D4 0x18001800_C0 Very Fast Walk Speed_L 0x2034C9D4 0x20002000_C0 Insane Walk Speed_L 0x2034C9D4 0x40004000# <*Timer Codes*>_C0 Disable Timer_L 0x20092910 0x24840000_C0 Enable Timer_L 0x20092910 0x2484FFFF_C0 Disable Clock_L 0x2028DE7C 0x24840000_C0 Backwards Clock_L 0x2028DE7C 0x2484FFFF_C0 Normal Clock_L 0x2028DE7C 0x24840001_C0 Infinite Ambulance Time _L 0x2038932C 0x24850000_C0 Infinite Taxi Time_L 0x20092910 0x24840000# <*Other Codes*>_C0 Auto Kill Mode_L 0x200513FC 0x0E200480 _L 0x20001200 0x3C0B08BF _L 0x20001204 0x256B2148 _L 0x20001208 0x3C0C0978 _L 0x2000120C 0x8D8C2A0C _L 0x20001210 0x116C0004 _L 0x20001214 0x00000000 _L 0x20001218 0x8D8C0000 _L 0x2000121C 0xA5800246 _L 0x20001220 0xA18003E1 _L 0x20001224 0x03E00008 _L 0x20001228 0x0E213A5C_C0 Disable Auto Kill Mode _L 0x200513FC 0x0E213A5C_C0 Reset Cheat Counter_L 0x2023AD38 0x34050000# <*Garage Codes*>_C0 Admiral in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040000 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Blista in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040001_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Dukes in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040002_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Hellicopter in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040003_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Noose Enforcer in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040004_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Buccaneer in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040005_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Fire Truck in Garage_L 0x20002010 0x24040006 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Rhino in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040007 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Ambulance in Garage _L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040008 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Burrito in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040009 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Flatbed in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404000A _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Boat in Garage_L 0x20222BF8 0x0A200804_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Angel Motorcycle in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x2404000C_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cabbie in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404000D_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Hellenback in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404000E_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Tanker in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404000F_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Banshee in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040010_L 0x20002018 0xAE4400B8_C0 Comet in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040011_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Police Patrol in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040012_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Yankee (Blue) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040013_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Turismo in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040014_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cognoscenti in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040015_L 0x20002014 0x0A288B00_C0 Chavos in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040016_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cavalcade in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040017_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cavalcade FXT in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040018_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Bobcat in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040019_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Recovery in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404001A_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Formula R in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404001B _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Resolution X in Garage _L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404001C _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Mk GT9 in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404001D _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 500 XLR8 in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404001E _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Style SR in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404001F _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 CityScape in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040020_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Bulldozer in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040021_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 FBI Rancher in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040022_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Boat in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040023_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Coast Guard Dinghy in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040024_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Coast Guard Launch in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040025_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Destroyer in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040026_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Dinghy in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040027_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Bus in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040028_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Resolution X Mini in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040029_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Gumshoe in Garage_L 0x20222BF8 0x0A200804_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Wet Skii in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404002B_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cruiser in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404002C_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Hellicopter in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404002D_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Red) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x2404002E_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (White) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x2404002F_L 0x20002018 0xAE4400B8_C0 Burrito (Blue/White) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040030_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Red/White) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040031_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Green) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040032_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Go Kart in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040033_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Yankee (White/Blue) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040034_L 0x20002014 0x0A288B00_C0 Yankee (Star) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040035_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Yankee Yellow) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040036_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Yankee (Red) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040037_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Yankee (White/Grey) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040038_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Infernus in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040039_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Patriot in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404003A _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Sabre GT in Garage _L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404003B _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Stallion in Garage _L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404003C _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Sultan in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404003D _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Pyote in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404003E _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Ingot in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x2404003F _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Perennial in Garage _L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040040 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Hearse in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040041 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Limo in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040042 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Admiral in Garage_L 0x20222BF8 0x0A200804 _L 0x20002010 0x24040043 _L 0x20002014 0x0A288B00 _L 0x20002018 0xAE4400B8_C0 Banshee in Garage_L 0x20002010 0x24040044_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (White) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040045_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Black) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040046_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Angel Van (Red) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040047_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Bobcat (Green/Red) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040048_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Ladder) in Garage _L 0x20222BF8 0x0A200804_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Yellow) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404004A_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Purple) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404004B_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Mini) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404004C_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Black Roof) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x2404004D_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Orange) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404004E_L 0x20002018 0xAE4400B8_C0 Burrito (Tan) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404004F_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Burrito (Light Purple) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040050_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Chavos (Blue/Black) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040051_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cognoscenti (Sunroof) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040052_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Comet (Neon Lights) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040053_L 0x20002014 0x0A288B00_C0 Turismo in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040054_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Dukes (Blower) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040055_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cavalcade FXT (Yellow) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040056_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Hellenback (Purple/White) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040057_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Manana (Green) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040058_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 NRG 900 (Motorcycle) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040059_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Alphamail in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404005A_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Angel (Blue Motorcycle) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x2404005B_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Baggage Handler in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404005C_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Chopper (Motorcycle) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404005D_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Voodoo in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404005E_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Hellicopter in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x2404005F_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Boat in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040060_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Angel (Black Motorcycle) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040061_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Sanchez (Dirt Bike) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040062_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Boat in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040063_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Dragon Wagon in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040064_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Cognosenti (Purple) in Garage _L 0x20222BF8 0x0A200804_L 0x20002010 0x24040065_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8_C0 Recovery (Red) in Garage_L 0x20222BF8 0x0A200804_L 0x20002010 0x24040066_L 0x20002014 0x0A288B00_L 0x20002018 0xAE4400B8。
cosamp算法代码
cosamp算法代码CoSaMP算法是一个基于稀疏编码的信号恢复算法,适用于高维数据的稀疏表示和低维数据的恢复。
本文将介绍CoSaMP算法的基本原理和代码实现。
基本原理:1.稀疏性约束:CoSaMP算法假设信号是基于一个稀疏字典的线性组合,因此需要对信号的稀疏性进行限制。
2.匹配追踪:CoSaMP算法通过匹配追踪来选取最强的信号成分,进而确定相应的字典原子。
具体来说,它选择的原则是在当前残余信号中,最能与稀疏字典原子匹配的信号成分。
3.反卷积:CoSaMP算法使用反卷积操作来确保移动选取的稀疏成分之后,残余信号的幅值尽可能小。
4.迭代过程:CoSaMP算法通过迭代过程来对信号进行重建。
它在每一轮迭代中,首先根据当前的残余信号进行筛选,提取出最强的k个信号成分,然后对这些成分进行反卷积,得到新的估计信号。
在重建误差满足一定条件时,CoSaMP算法停止迭代。
代码实现:CoSaMP算法的代码实现,需要使用一些矩阵运算和数值优化方法。
以下是CoSaMP算法的Python实现代码:```import numpy as npfrom scipy.linalg import normdef cosamp(A, y, s, eps, num_iter):m, n = A.shapex = np.zeros(n)residual = y.copy()idx = set()for i in range(num_iter):prod = np.abs(A.T @ residual)Omega = np.concatenate((idx, np.argsort(prod)[::-1][:2 * s -len(idx)]))z = np.zeros(n)z[Omega] = np.linalg.pinv(A[:, Omega]) @ yidx = set(np.argsort(np.abs(z))[::-1][:s])x[idx] = z[idx]residual = y - A @ xif norm(residual) < eps:breakreturn x```其中,输入参数包括:稀疏字典A、已采样信号y、稀疏度s、停止误差eps和最大迭代次数num_iter。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
视线高程:是指视准轴到地面的垂直高度。
通过视线高推算出待定点的高程,视线高程=后视点高程+后视读数。
视线高程:即仪器高,水准尺读数加水准点高程高差:地面两点高度之差,为两点高程之差,也可为两点尺读数之差高程:地面点到某一高程基准面的垂直距离,有绝对高程和相对高程之分测点就是你要测的目标的点数,测站是你测量过程中所设的站数,也就是你仪器所要放的位置的数量。
.如果是闭合导线```角度闭合差可以用你实际测的值-理论的值(180*(7-2))2.高程计算,你最起码要知道后视点的高程``但是可以假设.视线高程=后视读数+测点高程转点高程=视线高程-前视读数3.你要先算出整个坐标增量的和``再调整,,这是根据导线的等级表来看了``△x=SINぁ*边长`` △y=COSぁ*边长,,,根据这个就可以推出坐标了``先架设好水准仪,从水准点(BM)上读取后视读数,然后转动水准仪,读取目标点的读数(记为前视或中视),然后依此类推.计算时用水准点高程+后视读数-前视或中视读数.这是最基本的高程测量方法. 测量工作必须遵循“从整体到局部,先控制后碎部”的原则,主要有以下几个步骤:控制点(桩)的闭合,道路的中线准确的定位,道路原状横断面的测量,设计道路边线的确定,管线定位及测量,模板边线及高程,竣工高程及线型。
其中道路中线的定位是最为严谨的工作,它直接决定了道路的线形,而圆曲线的定位是测量过程中最为突出的一个方面,圆曲线测设一般分为两步,先确定曲线上起控制作用的主点,即曲线的起点(ZY)、曲线的中点(QZ)和曲线中点(YZ);然后结合设计给出的圆的半径(R)、切线长(L)、外矢距(E)和曲线对应的圆心角(á)测设所求曲线上每隔一定距离的加密细部点,用于详细标定圆曲线的形状和位置。
主点的测设方法为:先将经纬仪置于JD,望远镜后视ZY方向,自JD点沿此方向量取切线长T,打下曲线起点桩;然后转动望远镜前视YZ方向,自JD点沿方向量切线长T,打下曲线中点桩,再以YZ为零方向,测设水平角(90-á/2),沿此方向,从JD量外矢距E,打下曲线中点桩。
现在着重介绍一下偏角法放样圆曲线细部点,具体步骤为:1.检核ZY、QZ、ZY三主点的位置。
计算固定弦长L’对应偏角á’。
2.安置经纬仪于ZY点,经纬仪调平后,将水平度盘置零,照准JD点。
3.向YZ方向转动照准部,将度盘读数对准1点之偏角值á’,用钢尺沿ZY-1方向量取弦长L’以标定细部点1。
继续转动照准部,将度盘读数对准2点之偏角值2á’,并从1点起量取弦长L’与ZY-2方向相交(即距离与方向交会),以定细部点2,依法放样曲线上所有细部点。
4.最后应闭合于曲线终点YZ。
转动照准部,将度盘读数对准YZ点偏角á/2,由曲线上最后一个细部点起量出尾段弧长相应的弦长与视线方向相交,应为先前测设的主点YZ。
5.如果闭合差超出规定后,则要分析误差对测量数据进行平差,引起闭合差超出的原因除了仪器系统误差、读数误差、气候影响外,最主要的是拉尺的人为误差而产生的测点误差的积累,要减少误差的积累,可将经纬仪安置于ZY和YZ点分别向中点QZ测设曲线细部点。
并且将多次测量的点记录进行平差。
如果条件允许的话,可以先在电脑上绘制一份大样图,详细的标注每个细部点的偏角和距测站点距离,然后应用全站仪进行放样。
施工放样作业指导书(一)施工测量放样工艺流程图二)施工测量放样作业方法及要求一、说明本指导书是根据常规放样方法编写的,放样人员必须根据实际情况,如精度要求、控制点分布、现有仪器、现场条件、计算工具等来选择测站点和放样点的测设方法的不同组合及不同的检核方法。
各类工程及同一工程的不同阶段、不同部位对放样点的精度要求不同,所以对测站点和放样点的精度要求也不相同。
作业时请严格执行《工程测量规范》、《水电水利工程施工测量规范》和《施工测量控制程序》。
本书中提到的限差指规范要求的限差,如果设计上有特殊要求,按设计要求执行。
二、测量资料收集与放样方案制定1.测量放样前,应从合法、有效途径获取施工区已有的平面和高程控制成果资料。
2.根据现场控制点标志是否稳定完好等情况,对已有的控制点资料进行分析,确定是否全部或部分对控制点进行检测。
3.已有控制点不能满足精度要求应重新布设控制,已有的控制点密度不能满足放样需要时应根据现有的控制点进行加密。
4.必须按正式设计图纸、文件、修改通知进行测量放样,不得凭口头通知和未经批准的图纸放样。
5.根据规范规定和设计的精度要求并结合人员及仪器设备情况制定测量放样方案。
其内容应包括:控制点的检测与加密、放样依据、放样方法及精度估算、放样程序、人员及设备配置等。
三、放样前准备1.阅读设计图纸,校算建筑物轮廓控制点数据和标注尺寸,记录审图结果。
2.选定测量放样方法并计算放样数据或编写测量放样计算程序、绘制放样草图并由第二者独立校核。
3.准备仪器和工具,使用的仪器必须在有效的检定周期内。
给仪器充电,检查仪器常规设置:如单位、坐标方式、补偿方式、棱镜类型、棱镜常数、温度、气压等。
4.使用有内存的全站仪时,可以提前将控制点(包括拟用的测站点、检查点)和放样点的坐标数据输入仪器内存,并检查。
四、全站仪坐标法设站+极坐标法放点1.在控制点上架设全站仪并对中整平,初始化后检查仪器设置:气温、气压、棱镜常数;输入(调入)测站点的三维坐标,量取并输入仪器高,输入(调入)后视点坐标,照准后视点进行后视。
如果后视点上有棱镜,输入棱镜高,可以马上测量后视点的坐标和高程并与已知数据检核。
2.瞄准另一控制点,检查方位角或坐标;在另一已知高程点上竖棱镜或尺子检查仪器的视线高。
利用仪器自身计算功能进行计算时,记录员也应进行相应的对算以检核输入数据的正确性。
3.在各待定测站点上架设脚架和棱镜,量取、记录并输入棱镜高,测量、记录待定点的坐标和高程。
以上步骤为测站点的测量。
4.在测站点上按步骤1安置全站仪,照准另一立镜测站点检查坐标和高程。
5.记录员根据测站点和拟放样点坐标反算出测站点至放样点的距离和方位角。
6.观测员转动仪器至第一个放样点的方位角,指挥司镜员移动棱镜至仪器视线方向上,测量平距D。
7.计算实测距离D与放样距离D°的差值:ΔD=D-D°,指挥司镜员在视线上前进或后退ΔD。
8.重复过程7,直到ΔD小于放样限差。
(非坚硬地面此时可以打桩)9.检查仪器的方位角值,棱镜汽泡严格居中(必要时架设三脚架),再测量一次,若ΔD小于限差要求,则可精确标定点位。
10.测量并记录现场放样点的坐标和高程,与理论坐标比较检核。
确认无误后在标志旁加注记。
11.重复6~10的过程,放样出该测站上的所有待放样点。
12.如果一站不能放样出所有待放样点,可以在另一测站点上设站继续放样,但开始放样前还须检测已放出的2~3个点位,其差值应不大于放样点的允许偏差。
13.全部放样点放样完毕后,随机抽检规定数量的放样点并记录,其差值应不大于放样点的允许偏差值;14.作业结束后,观测员检查记录计算资料并签字。
15.测量放样负责人逐一将标注数据与记录结果比对,同时检查点位间的几何尺寸关系及与有关结构边线的相对关系尺寸并记录,以验证标注数据和所放样点位无误。
16.填写测量放样交样单。
五、全站仪(测距仪)边角交会法设站+极坐标法放样1. 在未知点P上架设全站仪(测距仪),整平;在已知点A上安置棱镜,量测棱镜高;在已知点B、C上安置照准标志。
2. 测量PA间平距D、高差DH和PA至PB、PC方向间的水平角α,β。
3.用D、α及A、B点的坐标计算P点的一组坐标;用D、β及A、C点的坐标计算P点的另一组坐标;两组坐标的差值不超过规定限差,取中数即为P点的最后坐标。
4.根据A点的高程HA和高差DH计算仪器的视线高:H视=HA-DH。
5.如果需要可以将P点坐标投影到地面上,并作好标记。
量取仪器高,求出地面P点的高程。
6.用极坐标法开始放样,放样过程与“四4~16”步骤相同。
六、经纬仪测角后方交会法+极坐标法放样1.在未知点上安置经纬仪(或全站仪,当已知点上不便安置棱镜时),整平;在已知点A、B、C、D上安置照准标志。
2.以四点中较远点A为零方向,用方向观测法测量A、B、C、D、A方向值两个测回;3.分两组数据用后方交会程序分别计算测站点P的坐标;两组坐标的差值不超过规定的限差,取中数作为P点最后坐标。
4.如果测站周围200米以内有两个已知高程的平面控制点,且放样点高程精度要求不高(大于±5厘米),可以观测仪器到两控制点的天顶距两个测回,分别用三角高程反算测站仪器的两个视线高(如果精度要求高或距离大于200米时,则要加入球气差改正)。
如果差值不超过限差,可取中数作为仪器的视线高。
5.如果需要,可以将仪器中心点坐标或高程投影到地面上,作好标记。
6.用极坐标法开始放样,选择一较远的控制点作为后视方向配置度盘(配置成零方向或方位角方向),用另一控制点检查后视方向,差值不能超过限差要求。
如果放样点的精度要求较高,且检核方向相差超过20〃时应对设置的方向进行改正。
7.记录员根据测站点和放样点坐标反算出测站点至放样点的距离和方位角(或相对于后视方向的角度)。
8.观测员转动经纬仪至第一个放样点的方向上,指挥司尺员用钢尺从测站点沿放样点的方向量取计算好的平距D°,并标定下来。
9.如果无法直接量取平距,可以用钢尺丈量从仪器中心至放样点的斜距,并测记天顶距(或立角),计算平距D,与理论平距D°比较:ΔD=D-D°,用钢尺在经纬仪视线方向上量取ΔD,标定放样点。
(非基岩和砼地面此时可以打桩)10.重复8、9步骤,放样出该测站的所有欲放样点位。
11.照准控制点,检查后视方向。
12.钢尺丈量放样点之间的间距,与理论值进行比较检核,其差值应不大于放样点的允许误差值。
13.测量放样负责人逐一将标注数据与记录结果比对,同时检查点位间的几何尺寸关系及与有关结构边线的相对关系尺寸并记录,以验证标注数据和所放样点位无误;14.如果一站不能放样出所有欲放样点,此时需在测站上利用极坐标法测设测站点,第二次设站,开始放样前还须检测已放出的2~3个点位,其差值应不大于放样点的允许误差;然后继续放样直至放样出所有需要放样的点位。
15.作业结束后,观测员检查记录计算资料并签字;16.绘制测量放样交样单。
七、方向交会法放样1. 在两个平面控制点A、B上各安置一台经纬仪,盘左后视其它控制点,并对度盘进行坐标方位角配置。
2. 计算A、B点至拟放样点P的方位角α、β。
3.旋转经纬仪A使方位角为α,观测员指挥画点人员在两视线交点附近画点P1P2。
4.旋转经纬仪B使方位角为β,观测员指挥画点人员在两视线交点附近画点P3P4。