新型并联机床的固有特性研究
并联机器人刚度与静力学研究现状与进展_艾青林
第42卷第5期力学进展Vol.42No.5 2012年9月25日ADVANCES IN MECHANICS Sep.25,2012并联机器人刚度与静力学研究现状与进展∗艾青林†黄伟锋张洪涛张立彬浙江工业大学特种装备制造与先进加工技术教育部重点实验室,浙江省特种装备制造与先进加工技术重点实验室,杭州310014摘要并联机器人的刚度与静力学分析,对于机构力学性能研究具有重要的理论价值和意义.本文围绕杆支撑、绳牵引和钢带传动3种结构形式,详细阐述了国内外并联机构刚度和静力学分析的研究现状.着重从有限元、解析模型和性能分析3方面分析了杆支撑并联机构的刚度研究进展.讨论了有关绳牵引并联机构中绳拉力、动载荷频率、绳牵引预紧力与刚度、静力学之间关系的研究成果.根据钢带并联机器人结构的特殊性,对钢带并联机构的刚度与静力学分析中可能遇到的失稳与振动问题进行了探讨.最后,对并联机器人技术发展情况进行总结与展望,指出随着刚度分析与静力学分析的不断深入,并联机器人的力学理论将会日趋成熟和完善,为并联机器人机构优化设计提供更深入、系统的理论依据.关键词并联机器人,刚度,静力学分析,杆支撑,绳牵引1引言并联机构与串联机构相比,具有刚度大、结构稳定、承载能力强、精度高、运动惯性小、运动学反解简单、实时控制性强等特点.从连接上下平台的运动链结构形式看,可把并联机构分为杆支撑并联机构与绳牵引并联机构.杆支撑并联机构的支撑及传动部件主要是液压缸、普通刚性杆、滚珠丝杠,以及其他的一些组合的刚性结构件.而绳牵引并联机器人是一种以柔性绳为传动和牵引机构的并联机构,绳只能承受拉力,受力具有单向性.最近出现一种新型的钢带并联机构[1],其运动链是横截面具有一定圆弧形状的钢带.与杆支撑并联机构相比,钢带并联机器人的工作空间比同体积的杆支撑并联机构要大得多.由于钢带质量轻,钢带并联机器人的运动速度比杆支撑并联机构快得多;与绳牵引并联机构相比,钢带并联机器人由于不用冗余约束控制,钢带并联机器人运动学分析和动力学分析及控制较绳牵引并联机构更简单.要掌握并联机构的性能,必须先对该机构的力学特性进行彻底深入的分析.人们早已将刚度作为并联机构研究中必须分析的一项指标.而在分析刚度之前,往往先进行并联机构的静力学分析,为后续研究作准备.本文按照杆支撑、绳牵引和钢带并联机器人这3种机构形式,对国内外关于这3种并联机构的刚度分析和静力学分析的研究现状进行了详细阐述,之后对并联机器人的未来发展趋势进行了展望.2刚度分析刚度包括了静刚度和动刚度.作为一项重要的性能评价指标,刚度不仅与机器人机构的拓扑结构有关,还与机构的尺度参数和截面参数密切相关.显而易见,一种由细杆组成的并联机构不一定比粗杆构成的串联机构刚度高.于是,为设计出大刚度的并联机器人,基于刚度性能分析和设计的参数优化设计研究至关重要[2].2.1杆支撑并联机构杆支撑并联机构一般具有结构刚性好、承载能力强等特点,运用较为广泛,较之绳牵引和钢带收稿日期:2011-05-20,修回日期:2012-03-04doi:10.6052/1000-0992-11-073∗国家自然科学基金项目(50805129,51275470)资助,浙江省自然科学基金项目(LY12E07004),浙江省教育厅重点项目(Z201121137)和浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室开放基金项目(2010EM003)资助†E-mail:aiql@584力学进展2012年第42卷并联机构,其最大特点就是刚度大.而关于并联机构刚度分析的文献大部分是针对杆支撑并联机构的.2.1.1静刚度从对杆支撑并联机构的静刚度分析总结中发现,现有的静刚度分析方法包括有限元分析法、静刚度解析模型法、静刚度性能分析法等.2.1.1.1有限元分析法随着计算机技术的发展,有限元分析法成为了并联机构设计和静刚度性能预估的重要手段.该方法主要是借助如ANSYS等有限元分析软件对所设计的虚拟样机进行应力应变分析,从而对样机的尺寸结构参数等进行改进.静刚度是金属切削机床重要的性能指标之一,提高机床的静刚度有利于提高机床的效率、加工精度和表面加工质量.在计算新型3-TPS并联机床的静刚度时,罗继曼等[3]应用有限元分析软件ANSYS仿真了不同位姿下的静刚度,得到沿主刚度方向的刚度比其他方向大,以及远离极限位置可以提高刚度的结果.为研究新型四自由度并联机床的刚度,Cor-radini等[4]和Company等[5]采用一种用多梁表达模型的有限单元分析方法.对于典型机构6-UPS 并联机床的静刚度问题,李育文等[6]是基于该机床的有限元模型,通过过渡点并利用Matrix27单元来定义铰链本身的刚度,以表现铰链本身的变形情况.在研究并联刨床时,刘红军等[7]采用有限元软件对其床身框架及平面约束机构进行刚度分析,并以仿真和实验方式进行刚度特性研究的验证.陈光伟等[8]建立了新型龙门式并联机床平面并联机构整机静刚度的有限元模型,得到动平台在广义工作空间下的刚度分布规律.另外,吴镇等[9]在子结构和结构对称的基础上,采用有限单元数值仿真,对Isoglide3-T3并联机构进行刚度分析.Li等[10]先建立改进型3-PRC全柔性并联微操作机构的模型,之后利用有限元软件ANSYS分析了该模型的刚度和静力学,从中获得了该机构相关结构参数的刚度变化趋势.而Xu等[11]对新型XYZ柔性并联微操作机构建立了工作空间内的刚度模型,并用有限元分析软件ANSYS的非线性静力分析功能测试了其刚度模型.从分析过程与结果中发现,利用有限元软件计算分析机构刚度虽然精确度较高,但其耗时多,工作量大.于是,为便于对并联机构多参数变量进行优化设计,可以建立静刚度的解析或半解析模型.2.1.1.2静刚度解析模型静刚度解析模型就是建立机构操作力与末端器变形之间映射关系.早在20世纪90年代,Cho 等[12]就根据运动影响系数,给出了一种通用运动并联系统的完整解析模型和反驱动系统的刚度公式解析方法,解决了混联操作器系统的系统化建模问题.通过几何关系Lee等[13]推导出了并联机器人静刚度模型的计算公式.另外,Gosselin[14]根据虚功原理,给出了空间机构操作力与末端变形之间的映射关系.近几年来,Chakarov[15]建立了冗余并联机构的刚度解析模型,并得出了该机构的刚度控制图谱.而对于柔性机构,Dong等[16]通过组合单个柔性铰链的刚度模型和公式化约束方程,建立了整个柔性机构的系统刚度解析模型,并提出了刚度的图形分析方法.Pham等[17]将柔性部件以串联或并联的方式连接起来,建立刚度解析模型.该模型允许建立刚度与尺寸之间的函数关系,但排除了在设计过程中柔性并联机构的自由变形.通过采用螺旋理论方法求出4-RUC 四自由度并联机构的雅可比矩阵,韩书葵等[18]推导了四自由度并联机器人的刚度计算公式.而对于Stewart平台[19],El-Khasawneh等[20]计算了其在不同方向上变化的解析刚度,给出了在给定姿态下寻找机构最小最大刚度及其方向的方法,并得出Stewart平台最小最大任意方向和单尺度刚度图.为研究并联机构在机床领域的运用,陈俊等[21]建立了四自由度混联机床并联部分的支链子系统、机架子系统和整机的刚度解析模型,并分析评价了该混联机床并联部分的刚度.吕亚楠等[22]利用刚度矩阵组集方法和考虑轴承导轨系统,建立了XNZ2010型冗余驱动混联机床并联机构的可变整机刚度解析模型.Lu等[23]还得到了对称四自由度4SPS+SP并联运动机床的总刚度解析矩阵.注意到并联机构静刚度映射和雅可比矩阵的必然联系这一特性.Han等[24]建立了3-RPS 并联机床包括力雅可比矩阵变化的瞬时刚度模型,并用例子证明了雅可比矩阵变化对3-RPS并联机床瞬时刚度模型的影响.王友渔等[25]对含有恰约束支链的Tricept机械手三自由度球坐标型并联机构提出了完备静刚度映射解析模型的简单建模方法.汪满新等[26]基于全变形雅可比矩阵,建立一种新型混联机器人模块Bicept的静刚度半解析模型.该方法首先将末端执行器位姿变形分解为无约束主动支链的拉压变形、恰约束支链的弯曲变形及其扭转变形3个部分,之后利用虚功原理和第5期艾青林等:并联机器人刚度与静力学研究现状与进展585结构矩阵法建立各子结构系统的静柔度模型,最后用线性叠加原理组装整机末端静柔度模型.另外,对一些特殊并联机构运用简单的方法会对刚度的提高起到很大作用.例如,利用静力学弹性变形概念与轴承方法,Yoon等[27]通过分析修正Delta并联连杆定位机构的解析结构刚度,从而改进设计出了具有更好平衡刚度的Delta机构.在微动器的研究中,张建军等[28]建立了6-PSS并联微动平台的静刚度模型,并求解出了其刚度矩阵.通过坐标变换和虚功原理,荣伟彬等[29]得到了3-PPSR构型六自由度并联微动机器人的静刚度矩阵模型,并从中获得各参数对该并联微动机器人静刚度的影响规律.Liu等[30]将一般宏动并联机器人的力和刚度的分析方法用于并联微动机器人,分析了雅可比矩阵的重要依据数、刚度指数与微动机器人运动链长度之间的关系,得到了所设计的运动空间中各相关指数曲线图集.最近出现的大行程柔性铰链并联机器人,在微操作、微装配、精密定位,甚至大型光学设备的大范围精密位姿调整等方面具有广泛的应用.对于6-PSS大行程柔性并联机构,孙立宁等[31-32]基于刚度方程提出其弹性模型.通过利用刚度组集加入协调方程,构建得到整机系统的刚度模型,并绘制出系统刚度影响图谱来进行系统刚度性能分析.此外,白志富等[33]利用有限元分析方法将球铰链刚度抽象成一个特征参数,加入到机构的解析模型中.从以上研究可知,在每次建立机构的静刚度解析模型时,其建立过程都较繁琐,且建模方法缺乏通用性.因此,非常有必要创建通用的静刚度建模方法,为今后研究并联机器人静刚度提供便利.2.1.1.3静刚度性能分析静刚度性能分析主要是基于静刚度解析模型来评价并联机构在整个工作空间内的静刚度性能,同时为参数设计提供参考.Carbone等[34]通过将串并混联机构的刚度性能指标公式化,来求解出刚度矩阵.在仅考虑主动关节弹性的基础上,Tsai 等[35]对比分析了4种三自由度平动机构的刚度特性.通过采用小变形叠加原理,周玉林等[36-38]分别对2-RRR+RRS球面并联机构、3-RRR三自由度球面并联机构和3-RRS三自由度球面并联机构进行分析,并以机构静力学分析结果为基础,建立整体静刚柔度矩阵并分析在整个工作空间内其静刚度性能和6个主刚度指标及所在主方向.对上述3种机构的研究表明,它们的主刚度在3个主方向上较大、另3个方向较小,而零点附近刚度较小,离零点越远刚度越大.Wu等[39]分析了带有驱动冗余度的三自由度平面并联机构的刚度和灵巧性,依据刚度指标的最小特征值指标,证实驱动冗余性能改善并联机构的刚度.魏轩等[40]对3-RRR 并联机构运动学模型推导了其雅可比矩阵,提出了一种评价并联机构刚度的评价指标.在对机床的研究中,张华等[41]对龙门式混联机床中平面三自由度并联机构的静刚度性能,提出了一种新的分析方法.此方法依据微分误差模型建立机床刚度矩阵,可计算出机床位置刚度和转动刚度的分布情况.Huang等[42]准确预估了Tripod并联机床的静刚度性能,并得到实验验证.而研究微动器时,Li等[10]在刚度解析模型的基础上评价3-PRC 并联微操作机构的静刚度性能,得到了该机构结构参数对刚度的变化趋势.Bashar等[43]通过分析Stewart平台的静刚度特性,确定了系统最大最小刚度的边界,为参数设计奠定了基础.另外,通过定义和计算平面二自由度驱动冗余并联机器人的全域性能指标,包括雅可比矩阵条件数、承载能力及刚度等,张立杰等[44]绘制出了空间模型内相应的性能图谱.从上述研究可知,静刚度性能评价指标的物理含义及使用范围各不相同,缺少统一的标准.因此制定统一的静刚度性能评价指标,能极大地推动并联机构刚度性能分析研究的发展.2.1.2动刚度动刚度反映了机构在动载荷作用下抵抗变形的能力,是衡量结构抵抗预定动态激扰能力的特性.目前国内外有关这方面研究的文献报道很少.在机床应用中,动刚度最受关注,这是由于其决定了零部件加工质量的稳定性.动刚度检测有助于我们了解在整个机械系统中力是如何产生和传递的.一般来说动刚度是一个频率的函数,它可同时测定瞬时冲击力和采样系统响应信号.在讨论了冲击试验和测量中要考虑的因素后,Xu等[45]提出了两种方案来研究机床主轴冲击试验.结果表明动刚度检测可以有效地解决机床应用上的振动问题,且发生最低动刚度处的频率比所测动刚度处的幅值更加一致.陈吉清等[46]利用螺旋矢量法,建立了机床动态加工过程中6-6Stewart并联机构的动刚度数学模型,计算了动态瞬时刚度和刀具的偏移误差,并对6-6Stewart并联机床的多种不同参数变化条件进行了数值模拟.针对典型的并联机构,敖银辉等[47]分析了在外力输入时机构的静刚度和动刚度.而梁辉等[48]采用能量法推586力学进展2012年第42卷导了3PRS/UPS冗余并联机床的动刚度模型,并对具有内力的该并联机床刚度进行分析,并给出特定位姿下的刚度计算实例.Pashkevich等[49]对三轴快速机床的一类过约束Delta并联运动机构(Orthoglide)提出一种分析机构动刚度的新方法,并依据其几何性分析了工作空间的占用率、刚度准则、转动刚度和移动刚度等.2.2绳牵引并联机构相比杆支撑并联机构而言,绳牵引并联机构中绳具有单方向受力性[50],即只能承受拉力,不能承受压力的特性.因此绳牵引并联机构的刚度分析大多是绳在受拉情况下进行的.理论分析认为,绳牵引并联机构的静刚度矩阵可分为动平台位姿变化产生的静刚度和绳位形变化产生的静刚度两项[51].目前绳牵引并联机构在飞行器风洞试验和大型望远镜领域应用广泛.在对低速风洞绳牵引并联支撑系统WDPSS-8进行静刚度分析与仿真时,胡龙等[52]认为在飞行器模型的主位置处进行准静态姿态变化时,支撑系统处于力位可控范围内,且其静刚度值满足静导数试验的要求,并以此为基础对缩比模型进行低速风洞测量试验.因并联机构的动平台位置在其工作空间内处于连续不断的变化中,使得静刚度分析需要根据位姿的变化不断进行重复分析,耗时费力.于是构造一种简易且能揭示其刚度变化趋势的解析分析模型就显得十分必要.刘欣等[53]就针对一种应用于低速风洞试验的六自由度绳牵引冗余并联机构,运用微分变换推导出了其刚度解析表达式.他们还基于微分变换和线几何理论,建立了包含关节弹性变形以及绳拉力等因素在内的绳牵引并联机器人刚度模型,并推导出其刚度矩阵数学表达式[54].汤奥斐等[55]也运用微分变换原理推导出了大型射电望远镜馈源柔索支撑系统的完整刚度的解析表达式,还对LT500m原型馈源支撑系统验证了该刚度分析方法的可行性.而对大型无线望远镜,他们把其绳支撑系统看作是绳驱动并联机器人,并以该系统的非线性模型证实了绳驱动并联机器人可达到工作空间受绳拉力、球面节点和绳长度的限制.还利用有限单元法与矩阵最小特征值估计刚度特性,建立起绳驱动并联机器人的静态刚度矩阵[56].王克义等[57]针对平面1R2T绳索牵引机构,建立系统静力螺旋平衡方程,并通过微分变换推导出动平台静刚度表达式,得出影响系统静刚度的因素为绳索拉伸刚度和绳索拉力,且两者的影响是相互耦合的.Sui等[58]研究了一种利用绳弹性与冗余驱动的刚度可变三自由度并联绳驱动机构.以静力和刚度分析为基础,根据微分变换理论推导出了节点刚度矩阵和机构总刚度矩阵,并用数值模拟证实,刚度不仅与绳刚度有关,还与绳拉力有关,且刚度变化受绳拉力控制.对于绳牵引并联机器人,动刚度也是一项基本指标,其随动载荷频率变化而变化.一般频率越高动刚度越大且趋于平坦,而在低频时动刚度变化较大.另外动刚度与振动的幅值也有关系,同一频率下振动幅值越大动刚度反而越小.但当动载荷频率与结构的固有频率相近时,有可能出现共振现象,此时动刚度最小,变形最大,应避开该共振点.为了克服绳低刚度引起的振动问题,Won 等[59]有效运用绳间的内力开发了一种基于并联绳机构的六自由度超高速机器人机构FALCON-7.通过分析该绳机器人的内部刚度,发现一些自由度的刚度不能有效地随着内力增加而增大,从而导致了预期振动问题的产生.他们还通过改进运动机构的约束,来降低由绳的弹性产生的振动,并通过实验对其进行验证.2.3钢带并联机构关于钢带并联机器人及其机构的研究在国内外仍未见报道.浙江工业大学提出了一种新型的钢带并联机器人结构,如图1所示.䕈䩶⬉ ㄦ㺙㕂Ⲃ 䕂⧗䫄图1钢带并联机器人三维模型该机构中连接上下平台的中间部件是钢带运动副装置.其中钢带横截面具有一定的圆弧弯曲第5期艾青林等:并联机器人刚度与静力学研究现状与进展587形状,能够承受一定的压力.但当该压力超过了临界失稳压力值时,机构就会产生失稳.苏先义[60]采用有限元方法对六自由度钢带并联机器人进行了失稳分析.他们介绍了钢带并联机器人的工作原理,给出了弯曲截面钢带开口薄壁类型杆件的失稳临界力计算方法,并利用有限元ANSYS软件分析了在钢带厚度、长度、姿态等因素不同的条件下,单根异形或圆弧形截面钢带、两根异形或圆弧形截面钢带联接体与6根异形或圆弧形截面钢带组成的钢带并联机构,为进一步研究钢带并联机器人的性能提供了理论依据.不同于杆支撑与绳牵引并联机构,钢带并联机构既能够承受很大的拉力,又能够承受一定的压力,且承压能力取决于钢带厚度材料及其形状.如果机构承受的压力超过了临界失稳压力值就会产生失稳.而钢带并联机器人在高速运动中,也会因为钢带质量轻且薄而发生振动.故非常有必要对钢带并联机器人静刚度及动刚度进行研究.基于以上分析,钢带并联机构的静刚度应以是否失稳作为评价的标准和依据.其动刚度应该和振动频率与幅值相关,可以通过模态识别方法对其进行研究.钢带并联机器人发生失稳和振动时其机构的刚度瞬时变为最差,因此钢带并联机器人在运动时应尽量避免失稳与振动发生.但是目前没有文献对钢带并联机构的刚度特性进行系统地研究.3静力学分析目前关于并联机构静力学研究方面的文献相对较少.但是静力学分析是机构分析的必要环节,是机构刚度分析和动力学分析的基础.文献中提到的静力学分析方法有螺旋理论法[61]、有限元法、矢量法、坐标变换、影响系数法[62]等,其中以螺旋理论法、影响因数法与有限元法的运用最广.3.1杆支撑并联机构对于杆支撑并联机构来说,静力学分析是对其进行其他力学分析的基础,一般少自由度机构静力学分析相对较简单,而多自由度机构静力学分析较复杂.静力学分析方法以螺旋理论法、影响因数法、虚功原理与有限元法居多,也不乏有矢量法、柔性摩擦圆法和虚位移法等.对于少自由度并联机构,很多学者运用不同的方法对其静力学分析进行过研究.像吴培栋等[63]对3/6-SPS并联机构应用螺旋理论,建立了静力学平衡方程并求出了该并联机构的雅可比矩阵J.在研究并联机床过程中,基于螺旋理论,Han等[64]对3-RPS 并联机床进行静力学分析,并得到一种等价于广义外力下6条链并联机床的变形协调方程.运用虚功原理也是静力学分析的一种方法,Li等[65]利用微分迭代理论和虚功原理,合成了3-UPU低移动并联机构末端器在广义力空间内的机构输入输出力间的广义力综合图.之后,他们[66]又利用虚功原理,建立少自由度并联机构输入端和末端广义力间的静力映射关系.朱春霞等[67]利用有限元软件ANSYS对特定位姿不同受力下的3-TPT并联机床整机进行静力分析,得出了在不同位姿下机床的应力应变图.另外,静力关系与速度传递关系的对偶性可通过力雅可比矩阵联系在一起.于是,静力分析中对雅可比矩阵的求解成为了重要步骤.在对3-UPS/S并联机构动平台进行静力学分析过程中,赵云峰等[68]得到了该机构的静力学雅可比矩阵和动平台静力平衡方程.Hu等[69-70]建立了3-RPS并联移动机构的6×6雅可比矩阵,并运用虚功原理建立静力学模型.他们[71]还基于观测RPS脚的约束力和虚功原理,得到2SPS+ 2RPS并联机构6×6雅可比矩阵和带有约束力的6×6刚度矩阵.Gosselin等[72]推导了六自由度空间并联机构雅可比矩阵的通用公式,从而确定了带有6个输入角度的Pluker向量.而于凌涛等[73]通过对单个杆件在铰链约束及重力作用下的受力情况进行分析,推导出3-RPS机构处于任意位姿时的连杆与动平台负载间完整静力学模型.除此之外,还可利用柔性摩擦圆法等其他方法分析.在研究微操作器时,杨启志等[74]利用伪刚体模型和柔性摩擦圆法,对三平移全柔性微动并联机构各支路与动平台进行详细的静力分析. Russo等[75-76]运用矢量法将六自由度并联机构中球质心的位置矢量表述为平台与6个驱动柱面节点方向和位置的函数,从而得到静力平衡条件表达式.Xu等[11]在考虑刚度与自然频率时,对一种新设计的XY Z柔性并联微机构,进行了静力学和动力学方面的性能评估.周玉林等[77]通过拆杆法建立机构静力学平衡方程,又利用小变形叠加原理建立起变形协调补充方程,完成对三自由度球面并联机构的静力学分析.孟祥志等[78]运用虚位移原理求解了3-TPS(RRR)并联机床各构件和末端执行器上受到各种广义外力时的静力学正逆解. Li等[79]对球面三自由度机构进行了静力学分析,。
并联机构运动分岔与稳定性分析

机械传动 2008 年 10
一条构型分支曲线跳动到另外一条构型分支曲线上 , 从而造成该位置分量的运动不确定 ; 在不同的构型分 岔点 , 构成分岔点的两条构型分支曲线之间的距离最 接近的位置分量也不同 , 如 M3 点为 x 分支曲线 ; 另外 还可以发现 , 在某些分岔点 , 如 M2 点 , 位置分量 x , y 和 z 分岔点前后的两条构型分支曲线间的距离都比较 远 , 由一条构型分支曲线转换到另外一条构型分支曲 线上的可能性比较小 , 因而这些位置分量构型都比较 稳定 , 不容易失控 。
© 1994-2008 China Academic Journal Electronic Publishing House. All rights reserved.
第 32 卷 第 2 期 并联机构运动分岔与稳定性分析 9
) 发生变化 , 则称 化经过μ 0 时 , 方程 ( 2 ) 解的数目 n (μ F 在 ( X0 ,μ 0 ) 处产生静态分岔 。称 ( X 0 , μ 0 ) 为静态分 岔点 ,μ0 为静态分岔值 。
设 ( X0 , μ 0 ) 为构型分岔点 , 取坐标变换 X = X X0 ,μ = μ - μ 0 。为方便起见 , 仍记 X 为 X ,μ 为μ。此
R1 + R2 - l i = 0 ( i = 1 , 2 , …, 6)
2 2 2
。特别是在航空航天领域 ,一旦出现运动失控 ,将
发生灾难性后果 。国内外学者对并联机构的奇异性问 题进行了大量的研究 ,研究主要集中在奇异性识别 、 分 析 ,以及运动奇异性规避等方面 。奇异性识别的方法 主要为 Jacobian 方法 [2 ] 、 Screw 理论 [3 ] 和 Grassmann [4 ] 等 。Basu
两种并联机器人的机构性能分析与运动控制研究
两种并联机器人的机构性能分析与运动控制研究并联机器人是一种具有多个机械臂、执行器和传感器的机器人系统,具有高精度、高稳定性和高可靠性的特点。
在工业自动化和生命科学等领域,广泛应用于精密操作、装配、搬运等任务。
为了进一步提高并联机器人的机构性能和运动控制精度,研究人员提出了许多创新的方法和算法。
目前,主要有两种并联机器人的机构性能分析与运动控制研究,分别是基于刚性机械臂的并联机器人和柔性物体的并联机器人。
基于刚性机械臂的并联机器人是指机器人系统中,机械臂和执行器由刚性材料构成。
这种机器人通常具有较大的负载能力和较高的运动速度。
在机构性能分析方面,研究人员主要关注并联机器人的刚度、可重复性和精度等指标。
而在运动控制方面,传统的方法包括基于位置控制、速度控制和力控制的算法。
此外,还有许多创新的方法,如基于模型的控制、自适应控制和优化控制等。
柔性物体的并联机器人是指机器人系统中,机械臂和执行器由柔性材料构成,可以适应复杂的非刚性工件。
在机构性能分析方面,研究人员主要关注并联机器人的柔性度、变形能力和稳定性等指标。
而在运动控制方面,传统的方法无法直接应用于柔性机械臂的运动控制。
因此,研究人员提出了许多创新的方法,如基于模型的控制、自适应控制和协调控制等。
在并联机器人的机构性能分析方面,主要包括刚度分析、可重复性分析和精度分析等。
刚度分析是指研究机器人系统在外力作用下的刚度性能。
可重复性分析是指研究机器人系统的姿态误差和姿态精度。
精度分析是指研究机器人系统的位置误差和位置精度。
在机构性能分析的基础上,可以进一步优化机器人的机构参数和设计。
在并联机器人的运动控制研究方面,主要包括位置控制、速度控制和力控制等。
位置控制是指控制机器人系统到达目标位置的控制方法。
速度控制是指控制机器人系统运动速度的控制方法。
力控制是指控制机器人系统对外力的敏感性和响应能力。
在运动控制方面的研究中,可以根据具体任务和要求,选择合适的控制算法和控制策略。
三自由度并联机床驱动分支动力学分析
软 件 中的示 意 图 。
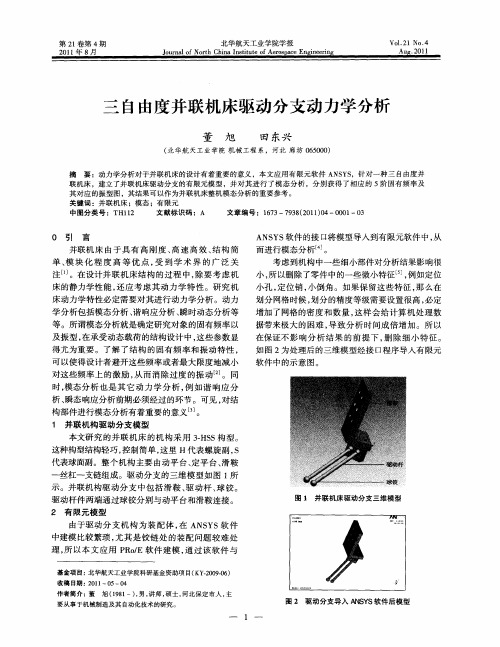
本文研究 的并 联机床 的机构采用 3H S构型。 .S 这种构型结构轻巧 , 控制简单 , 这里 H代表螺旋副 , s 代表球面副。整个机构主要 由动平 台、 定平 台、 滑鞍
—
丝杠 一支链 组成 。驱 动 分支 的三 维 模 型如 图 1 所
基金项 目: 华航天工业学 院科研基金资助项 目( Y 2 0 —6 北 K . 90 ) 0
收稿 日期 : 0 1 5—0 2 1 一O 4
作者简介 : 董
旭 (9 1 , , 18 一) 男 讲师 , 士, 硕 河北保定 市人 , 主
要从事于机械制造及其 自动化技术的研 究。
一
图 2 驱 动分 支 导 入 A S S软 件 后 模 型 NY
床的静力学性能 , 还应考虑其动力学特性。研究机 床动力学特性必定需要对其进行动力学分析 。动力 学分 析包 括模 态 分析 、 响应 分析 、 时动态 分 析等 谐 瞬
等 。所谓 模 态分 析就 是确 定研 究对 象 的 固有 频率 以
及振型 , 在承受动态载荷的结构设计 中, 这些参数显 得尤 为重 要 。 了解 了 结构 的 固有 频 率 和 振 动 特性 , 可以使得设计者避开这些频率或者最大限度地减小 对这 些频 率 上 的激 励 , 而 消 除过 度 的振 动 _ 。同 从 2 ]
考虑 到机构 中一些 细小部 件对 分析 结果 影 响很
小 , 以删 除 了零 件 中的一些微 小特 征 , 所 ]例如 定 位 小孔 , 位 销 , 倒 角 。如果 保 留这些 特 征 , 么在 定 小 那 划分 网格 时候 , 划分 的精 度等 级需要 设 置很高 , 定 必 增加了网格的密度和数量 , 这样会 给计算机处理数 据带来极 大 的 困难 , 导致 分 析 时 间 成倍 增 加 。所 以
并联机床运动学自标定方法研究

并联机床运动学自标定方法研究机床运动学自标定方法是现代制造技术中重要的研究领域之一、并联机床作为一种特殊的机床结构,其运动学参数标定更加复杂。
本文将对并联机床运动学自标定方法进行研究,并进行详细介绍。
首先,我们需要了解并联机床的基本结构和运动学模型。
并联机床由多个平行连杆组成,每个连杆由旋转副连接,形成一个闭链运动系统。
在运动学模型中,需要确定每个连杆的长度和连接角度,以及工作台的位置和姿态。
这些参数决定了机床的运动学特性。
然而,并联机床的运动学参数往往无法直接测量,因此需要通过自标定方法来求解。
自标定方法的核心思想是通过机床的运动状态和姿态数据,在已知的参考点或者已知位置的情况下,通过数学模型和优化算法,反推机床自身的运动学参数。
目前,关于并联机床运动学自标定方法的研究有很多,下面将介绍几种常见的方法。
第一种方法是基于传感器数据的自标定方法。
该方法通过传感器测量机床的运动状态和姿态数据,如位置、速度、加速度等,然后将这些数据作为参数输入到数学模型中,通过优化算法求解机床的运动学参数。
该方法的优点是适用范围广,可以用于各种类型的并联机床。
缺点是需要准确的传感器测量数据,对传感器的要求较高。
第二种方法是基于机器视觉的自标定方法。
该方法利用摄像头或其他视觉传感器获取机床的运动状态和姿态数据,然后通过图像处理和计算机视觉算法,提取特征点或轮廓线,进而求解机床的运动学参数。
该方法的优点是非接触性,适用于各种环境和工况下的机床标定。
缺点是对图像处理和计算机视觉算法的要求较高。
第三种方法是基于强化学习的自标定方法。
该方法利用强化学习算法,在已知的参考点或已知位置下,通过多次尝试和优化,不断调整机床的参数,使得机床的运动状态和姿态数据与真实值尽可能接近。
该方法的优点是自动化程度高,对机床本身的要求较低。
缺点是求解时间较长,需要大量的试验数据。
总结来说,并联机床运动学自标定方法是一项复杂且具有挑战性的任务。
研究人员可以根据具体情况和需求选择合适的自标定方法,同时结合机床的特点和性能进行优化和改进。
并联机床的设计理论与关键技术

详解并联机床的设计理论与关键技术1 概述为了提高对生产环境的适应性,满足快速多变的市场需求,近年来全球机床制造业都在积极探索和研制新型多功能的制造装备与系统,其中在机床结构技术上的突破性进展当属90年代中期问世的并联机床(Parallel Machine Tool),又称虚(拟)轴机床(Virtual Axis Machine Tool) 或并联运动学机器(Parallel Kinem atics Machine)。
并联机床实质上是机器人技术与机床结构技术结合的产物,其原型是并联机器人操作机。
与实现等同功能的传统五坐标数控机床相比,并联机床具有如下优点:刚度重量比大:因采用并联闭环静定或非静定杆系结构,且在准静态情况下,传动构件理论上为仅受拉压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
响应速度快:运动部件惯性的大幅度降低有效地改善了伺服控制器的动态品质,允许动平台获得很高的进给速度和加速度,因而特别适于各种高速数控作业。
环境适应性强:便于可重组和模块化设计,且可构成形式多样的布局和自由度组合。
在动平台上安装刀具可进行多坐标铣、钻、磨、抛光,以及异型刀具刃磨等加工。
装备机械手腕、高能束源或CCD摄像机等末端执行器,还可完成精密装配、特种加工与测量等作业。
技术附加值高:并联机床具有“硬件”简单,“软件”复杂的特点,是一种技术附加值很高的机电一体化产品,因此可望获得高额的经济回报。
目前,国际学术界和工程界对研究与开发并联机床非常重视,并于90年代中期相继推出结构形式各异的产品化样机。
1994年在芝加哥国际机床博览会上,美国Ingersoll铣床公司、Giddings & Lewis公司和Hexal公司首次展出了称为“六足虫”(Hexapod)和“变异型”(VARIAX)的数控机床与加工中心,引起轰动。
此后,英国Geodetic公司,俄罗斯Lapik公司,挪威Multicraft公司,日本丰田、日立、三菱等公司, 瑞士ETZH和IFW研究所,瑞典Neos Robotics公司,丹麦Braunschweig公司,德国亚琛工业大学、汉诺威大学和斯图加特大学等单位也研制出不同结构形式的数控铣床、激光加工和水射流机床、坐标测量机和加工中心。
哈量新一代并联机床LINKS_EXE700

2004年,Tricept并联机床发明创始人纽曼先生组建了Exechon公司,发明了新一代Exechon并联机床技术。
新一代并联机床技术突破了阻碍并联机床发展与广泛应用的诸多瓶颈和障碍,性能指标与易用性均大幅优于Tricept技术。
该项技术通过了PCT(国际专利合作协议组织)的审定,并在所有PCT协议参与国家和地区(包括中国)申请并获得了发明专利。
哈量LINKS-EXE7100是在结合哈量原有并联机床经验积累,加上引进使用Exechon并联机床最新专利技术的基础上设计制造的新一代并联机床,在机床动态性能、刚性、精度以及用户编程操作简易性方面都达到了很高水平。
1LINKS-EXE700并联机床特点1.1运动关节及机构自由度数量对机床性能的影响并联运动结构从外观来看,像是很多“手臂”一端彼此相连,另一端与基座相连。
这种设计要求各关节是多自由度的。
并联运动机床(PKM)手臂的数目取决于动平台运动轴的设计数量,但是不论哪种设计,遵循的目标都应将灵活性与刚性结合在一起。
因关节点结构复杂,既要刚性好、无间隙,又要成本低,是设计并联机床的突出问题。
这个技术问题限制了市场上的并联机床数量,这也是为什么关节点少、自由度少的并联机床成为目前最成功的并联机床的原因。
Tricept并联机床使用了相对少的关节和自由度数,正是Tricep当年在世界并联机床市场能占70%份额的原因。
1.2Tricept并联机床的缺陷Tricept并联机床的每一个关节点都有一个以上的自由度,像一个万向铰链。
各伸缩杆只承担轴向载荷,故必需设置中心管来实现约束更多的自由度。
中心管承受的荷载对中心管造成的挠曲和扭转,会严重影响机床的整体刚性。
为解决这一问题,在设计上应使挠曲和扭转对中心管精度和动态性能的影响降低到最小。
这种优化设计是把中心管的直径加粗,管壁减薄,可是这样一来机床的工作范围大大地缩小了。
唯一的解决办法是找出钢管壁厚与直径之间的均衡点。
基于2RPUUPR并联机构的五轴混联机床设计与分析
基于2RPU/UPR并联机构的五轴混联机床设计与分析课题组基于2RPU/UPR并联机构提出了一种(2RPU/UPR+R)+P五自由度混联机构,本论文基于该混联机构设计了一种五轴混联机床结构,对其进行了运动学、静刚度及工作空间的分析。
该机床兼具并联机构刚度大、承载能力强、无累积误差以及串联机构工作空间大且运动灵活等优点,能够达到加工较高精度复杂曲面的目的。
本文主要内容如下:首先,根据加工需求,定性地对比分析了包括课题组提出的(2RPU/UPR+R)+P机构在内的几种典型五自由度机构,并最终选用课题组提出的混联机构作为五轴混联机床的机构构型。
采用螺旋理论对该新型五自由度混联机构的转轴进行分析,分析得到其具有两条连续转轴。
其次,采用闭环矢量法和D-H法分别对该混联机构的并联和串联部分进行位置正反解分析,并求得了并联部分的多组正解。
在此基础上利用齐次变换矩阵推导得到整体混联机构的正反解模型,并验证了推导结果的正确性。
再次,在假设机构仅各分支杆为柔性杆的前提下,结合螺旋理论和材料力学的知识,基于小变形叠加原理推导了各分支杆的刚度矩阵,并利用分支与机构之间的位姿变换关系,得到整体混联机构的静刚度表达式。
利用有限元软件对机构的简化模型进行受力分析,将机构末端变形值与理论值对比,两者之间偏差较小,验证了静刚度模型的正确性。
然后,在考虑移动副行程,转角的限制和分支杆干涉的条件下,利用极限边界搜索法求得混联机构的整体工作空间,并分析其工作空间特点,验证以其为构型而设计为可加工大型复杂结构件的混联机床的可行性。
最后,根据加工要求完成机床的主轴选型,进而对机床中各关键部件以及整体结构进行设计,并利用有限元软件得到机床完整模型在初始位姿和其他典型位姿下的静刚度值,并与理论值作对比,验证前文理论推导得到的静刚度模型的有效性,随后分析了机床模态,得到其固有频率和振动特性。
并联机床
由来:(串联机床缺陷)理论上串联机构具有工作范围大,灵活性好等特点,但精度低,刚性差,传统机床串联机构刀具只能沿固定导轨进给、刀具作业自由度偏低、设备加工灵活性和机动性不够等固有缺陷。
定义与介绍:并联机床(又称虚拟轴机床)是指用并联机构作为进给传动机构的数字控制机床。
与传统机床相比并联机床具有刚度重量比大、响应速度快、对环境适应性高、技术附加值高等优点。
并联机床是近年才出现的一种新概念机床,它是并联机器人机构与机床结合的产物,是空间机构学、机械制造、数控技术、计算机软硬技术和CAD/CAM技术高度结合的高科技产品。
它克服了传统机床串联机构的缺陷,可实现多坐标联动数控加工、装配和测量多种功能,更能满足复杂特种零件的加工。
自其1994年在美国芝加哥机床展上首次面世即被誉为是“21世纪的机床”,成为机床家族中最有生命力的新成员。
并联机床具有以下特点:1.结构简单、价格低机床机械零部件数目较串联构造平台大幅减少,机床的制造和库存成本比相同功能的传统机床低得多,容易组装和搬运。
2.结构刚度高由于采用了封闭性的结构使其具有高刚性和高速化的优点,其结构负荷流线短,而负荷分解的拉、压力由六只连杆同时承受,以材料力学的观点来说,其拥有高刚性。
其刚度重量比高于传统的数控机床。
3.加工速度高、惯性低两力构件是最节省材料的结构,它的移动件重量减至最低且同时由六个致动器驱动,因此机器很容易高速化,且拥有低惯性。
4.加工精度高由于其为多轴并联机构组成,六个可伸缩杆杆长都单独对刀具的位置和姿态起作用,因而不存在传统机床(即串联机床)的几何误差累积和放大的现象,甚至还有平均化效果;其拥有热对称性结构设计,因此热变形较小;并联机床下平台主轴无论处于加工范围的任何位置,其动态特性都保持高度一致。
5.机床加工效率更高,加工产品尺寸范围更大机床在有效工作空间内可实现5~6面及全部复合角度的位置加工,适合用于敏捷加工;需一次装夹即可完成5~6面的复杂异型件及复合角度孔和曲面的加工等,可广泛用于航天航空、船舶、国防、汽车、大型模具、发电设备等大型复杂零件的自由曲面加工。
并联机床

并联机床一定义:并联机床(Parallel Machine Tools),又称并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),也曾被称为六条腿机床、六足虫(Hexapods)。
并联机床是基于空间并联机构Stewart平台原理开发的,是近年才出现的一种新概念机床,它是并联机器人机构与机床结合的产物,是空间机构学、机械制造、数控技术、计算机软硬技术和CAD/CAM技术高度结合的高科技产品。
它克服了传统机床串联机构刀具只能沿固定导轨进给、刀具作业自由度偏低、设备加工灵活性和机动性不够等固有缺陷,可实现多坐标联动数控加工、装配和测量多种功能,更能满足复杂特种零件的加工。
自其1994年在美国芝加哥机床展上首次面世即被誉为是“21世纪的机床”,成为机床家族中最有生命力的新成员。
2.并联机床的特点整体而言,传统的串联机构机床,是属于数学简单而机构复杂的机床,而相对的,并联机构机床则机构简单而数学复杂,整个平台的运动牵涉到相当庞大的数学运算,因此虚拟轴并联机床是一种知识密集型机构。
这种新型机床完全打破了传统机床结构的概念,抛弃了固定导轨的刀具导向方式,采用了多杆并联机构驱动,大大提高了机床的刚度,使加工精度和加工质量都有较大的改进。
另外,由于其进给速度的提高,从而使高速、超高速加工更容易实现。
由于这种机床具有高刚度、高承载能力、高速度、高精度以及重量轻、机械结构简单、制造成本低、标准化程度高等优点,在许多领域都得到了成功的应用,因此受到学术界的广泛关注。
由并联、串联同时组成的混联式数控机床,不但具有并联机床的优点,而且在使用上更具实用价值。
随着高速切削的不断发展,传统串联式机构构造平台的结构刚性与移动台高速化逐渐成为技术发展的瓶颈,而并联式平台便成为最佳的候选对象,而相对于串联式机床来说,并联式工作平台具有如下特点和优点:结构简单、价格低。
并联运动机床1ppt课件

一、并联运动机床概述 二、并联机床技术的研究和发展 三、并联机床的特点 四、并联运动机床结构 五、并联机构的应用
一、并联运动机床概述
1. 新概念机床-并联运动机床 并联机床(Parallel Machine Tools),又称
并联结构机床(Parallel Structured Machine Tools),虚拟轴机床(Virtual Axis Machine Tools),也曾被称为六条腿机床、六足虫 (Hexapods)、21世纪的机床。如图1所示
Stewart平台适合于模块化生产。 对于不同的 机器加工范围,只需改变连杆长度和接点位置,维 护也容易,无须进行机件的再制和调整,只需将新 的机构参数输入。
7. 变换座标系方便
由于没有实体座标系,机床座标系与工件座标 系的转换全部靠软件完成,非常方便。
Stewart平台应用于机床与机器人时,可以降 低静态误差(因为高刚性),以及动态误差(因为低惯 量)。
• 机床底座上有 3 根按照 120°分布的立柱,立柱 的顶端借助框形横梁连接,以加强机床刚度。
• 机床由 3 组杆件通过球铰支撑主轴部件,每组由 两根固定杆长的杆件组成。
• 杆件的位移由滑板移动来实现,滑板由滚珠丝杆 (直线电机)驱动,沿立柱导轨上下移动。
• 主轴部件可以实现 3 个坐标的运动,除完成切削 加工工作外,还抓取待加工零件和放回加工完毕 的零件。
并联机构
直线电动机 沿导轨移动 万向饺
万向铰链
固定杆长 的杆件
主轴 万向铰链
电滚珠丝杆
电滚珠丝杆是伺服电动机与滚珠丝杆的集 成,具有减少传动环节、结构紧凑等一系列优 点。采用电滚珠丝杆可以大大简化数控机床的 结构。
并联机床(共10张PPT)
六杆并联机床
介绍一种结构新颖、高速加工用的并联运动机床。 它采用5杆并联机构和5环驱动的主轴部件,在并联运动 机构理论上有所突破,从而实现主轴部件的偏转角大于 90º,能够真正实现5轴联动、5面加工。
创新在于:首次采用5杆并联机构和5环驱动的主 轴部件,在并于90º,能够真正进行5面加工。
伺服电动机 万向铰链
环形铰链
主轴部件
滚珠丝杠
崭新的5杆配置使机床具有以下特点:
介绍一种结构1新)颖机、高床速加运工用动的并部联件运动的机床质。 量很小,采用功率小的驱动装置就可以达到很 高的加速度,所产生的惯性反作用力也非常小。 一次装夹,完成5面、5轴联动加工曲面的例子(汽车模型外形)如图所示。
2) 采用封闭框架结构和对称配置,使机床工作时产生的力 。
传统数控机床是按笛卡尔坐标将沿3个坐标轴线的移动 X、Y、Z 和绕3个坐标轴线转动 A、B、C的控制依次串联叠加,形成所需的刀具运动轨迹
尽可能相互抵消,从而保证机床的高动态性能。 。
1) 机床运动部件的质量很小,采用功率小的驱动装置就可以达到很高的加速度,所产生的惯性反作用力也非常小。 按笛卡尔坐标控制沿3个轴线的移动和绕2个轴线的转动 六轴联动的并联机床有六个自由度,可用于加工具有负杂曲面的零件。 并联机床(虚拟轴机床):有六根驱动杆并行连接在固定平台和活动平台之间,每根杆的两端均采用球面支撑,刀具装在活动平台上。
六自由度并联机床开题报告
毕业设计(论文)开题报告题目:六自由度并联机床结构设计与分析专业机械电子工程学生指导教师日期1.课题背景及研究的目的和意义1.1课题背景并联机器人具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,已广泛应用于工业、航天、航海、医疗、娱乐等领域,与目前广泛应用的串联机器人在应用上构成互补关系,因而扩大了整个机器人的应用领域。
由于其卓越的优点及巨大的潜在应用前景,并联机器人的理论及应用研究受到了国内外学者的重视,在过去几十年取得了长远的发展。
并联机床作为机床技术和机器人技术相结合的产物,与传统结构机床相比具有很多的优点,展现出广阔的发展和应用前景。
传统机床中,驱动刀具与工件作相对运动的进给轴按照笛卡尔坐标布置,为串联、开链结构。
为了实现5轴加工,需在传统的3轴机床上再增加两个轴来控制刀具的姿态,所有这些轴都按串联结构布置。
当一个轴运动时,需带动串联运动链上后面的所有轴一起运动,因此其运动惯性大,动态性能较差。
同时,产生的切削力沿开链传递,使每一部件的缺陷都会对切削精度产生影响。
基于并联机器人开发的并联机床,由于其运动平台由几个简单的串联运动链并行驱动,与传统串联结构的机床相比,具有如下优点:(1)并联机床刚度大,结构稳定,承载能力强。
上下平台之间由六根杆支撑,形成并联闭环静定结构,传动构件理论上仅为受拉、压载荷的二力杆,故传动机构的单位重量具有很高的承载能力。
(2)并联机床没有误差的累积和放大(串联式末端误差是各关节的积累和放大)所以可以达到更高的加工精度。
(3)并联机床移动部件质量小,运动灵活,响应速度快,动态性能好,易于实现空间复杂曲面加工,适合于高速加工。
(4)并联机床正解困难反解容易,而机器人在线实时计算是要计算反解的,故轨迹规划简单,易于实现控制。
(5)并联机床结构简单,零件总数较少,成本容易控制,集成化、模块化程度高,使得并联机床结构设计和加工多方面得以简化。
并联机床的特性与应用
并联机床的特性与应用摘要:并联机床是机床技术与机器人结合的一项新产物,在技术的革新下,并联机床类型愈加多样,在工程界与学术界有着良好的发展前景。
关于并联机床,国内外也投入了大量的人力、物力、财力来研究,取得了良好的成效。
本文主要针对并联机床的类别、特征与应用进行分析。
关键词:并联机床;特性;应用并联机床是并联机器人机构和机床结合并建立在空间机构学、机械制造、数控技术和计算机的软硬件技术以及CAD和CAM等技术上的一种高科技产品,可以实现加工工件的多坐标的联动数控加工、装配和测量以及对各种复杂的特种零件的加工工作。
在设计上无导轨,克服了传统的数控机床刀具只能沿着固定导轨行进而造成的刀具作业自由度偏低、灵活性差和机动性不够的缺陷,被广泛应用于航天航空、船舶、国防和大型模具等大型复杂零件或特种零件的加工制造。
相较于传统的串联机床来说,并联机床具有以下特性:一、简单的结构形式和传统的串联结构的机床相比,并联机床的机床机械零部件数目大幅减少,其组成部件主要由滚珠丝杠、虎克铰、球铰以及伺服电机等组成。
其通用组件多可以由专门厂家进行生产制造,因而并联机床在制造和库存成本上都大幅降低,并且容易进行部件的组装和搬运。
二、良好的结构刚性封闭性结构的采用使得并联机床具有相对较高的刚性。
由于并联机床的结构负荷流线短,并且其负荷分解的拉力和压力是有六只连杆同时承受的,在外力一定的情况下,从材料力学的角度来看,在应力和变形方面,悬臂量的应力和变形最大,两端插入次之,随后依次是两端简支撑和受力的二力结构,最后是受张力的二力结构。
因而,并联机床拥有高刚性的特点,优于传统的串联机床。
三、加工速度高而且惯性低在设计上,并联机床的结构所承受的力能发生方向的改变,两力构件因此成为最能节省材料的结构,并且并联机床的移动件的组成数目减少且受六个致动器的同时驱动,机器运转达到高速化很容易,并且惯性相对较低。
四、良好的加工精度并联机床的组成是多轴并联机构,其六个可伸缩杠杆长都可以单独作用于刀具的位置和姿态,不会造成传统串联机床出现的几何误差积累和放大的问题,甚至还可以产生平均化效果,具有结构设计的热对称性,热变形相对较小,所以会产生工件加工的高精度。
并联机床UG编程及Vericut仿真

1引言1.1 并联机床并联机床是近年发展起来的一种新一代机床,其工作原理和结构,与传统的以笛卡尔坐标为基础的串联运动机床,有很大的不同。
与传统机床相比,并联运动机床具有结构简单、刚度高、动态性能好、速度快、可重构等优点。
由于它易于实现较复杂的空间运动,因而具有十分广阔的应用前景,是加工复杂零件的一个生力军。
1.1.1 并联机床在国际上的发展状况自60年代并联机构首次应用于飞行模拟器,并联机构在许多领域的应用显示了它所具有的强大的技术优势和实用价值,越来越多的专家学者尝试将并联机构应用于机床制造业。
同时传统机床由床身、立柱、主轴箱和工作台等部件串联而成的非对称“C”型结构布局所固有的缺陷,迫使全球机床制造业开发新型制造设备与系统。
早在1993年美国得克萨斯州自动化与机器人研究所,成功地研制出可完成铣、磨、钻、惶、抛光和高能束等多种加工的并联加工机械手。
1994年在美国芝加哥MTS'94博览会上美国Ingersoll铣床公司、Giddings&Lewis公司和Hexel公司,首次展出了称为“六足虫”和“变异型”的数控机床与加工中心并引起轰动,标志着并联机构正式进入机床制造领域。
1.1.2 并联机床在国内的发展状况1994年并联机床在国际上首次展出之后,中国各高校和科研单位也纷纷投入力量进行研究[53-66] 自1998年至今的历界北京机床展,均有新型的并联机床问世。
在1998年的北京机床展上,展出了由清华大学和天津大学联合研制的我国第一台并联机床样机. 1999年北京中国国际机床展上,哈尔滨工业大学研制的BJ-30型并联机床成功地进行了叶轮加工的演示,同时,(这次展览会上还展出了由天津大学与天津机床厂联合研制的3自由度并联机床。
2001年北京中国国际机床展上,哈尔滨工业大学与哈尔滨量具刃具厂联合研制了BLJ一工型并联机床成功地进行了不锈钢汽轮机叶片的加工演示,这是目前国际上首次在公开场合利用并联机床切削不锈钢件。
5-UPS_PRPU五自由度并联机床精度分析(1)
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
覃艳明, 张一同, 鹿玲, 赵永生 燕山大学,机械工程学院,秦皇岛,066004
机械设计与研究 MACHINE DESIGN AND RESEARCH 2004,20(4) 1次
参考文献(9条)
1.Oren Masory.Jian Wang and Hanqi Zhuang Kinematic modeling and Calibration for a Stewart Platform
[3] 杩琳,黄田.面向制造的并联机床精度设计[J].中国机械工 程,1999,(10):1114~1117.
[4]曾宪菁,黄田,曾子平.3.融水型数控回转台的精度分析[J].机
械工程学报,200l,7(11):42~45.
[5]刘文涛,李建生,祁勇.并联杆系机床工作空间与精度分析[J].
制造技术与机床,1998,11:9~11.
参考又献:
[1] 0r∞Mas。ry,Jian wang and Hanqi Zhuang.Kin锄atic modeling and Calibmtion for a stewan P1atfo肌[J].Adanced Robotics.
1997,(5):519~539.
[2]苏玉鑫,段宝岩.六自由度stewart平台运动精度分析[J].西安 电子科技大学学报(自然科学版),2000,27(4):401~403.
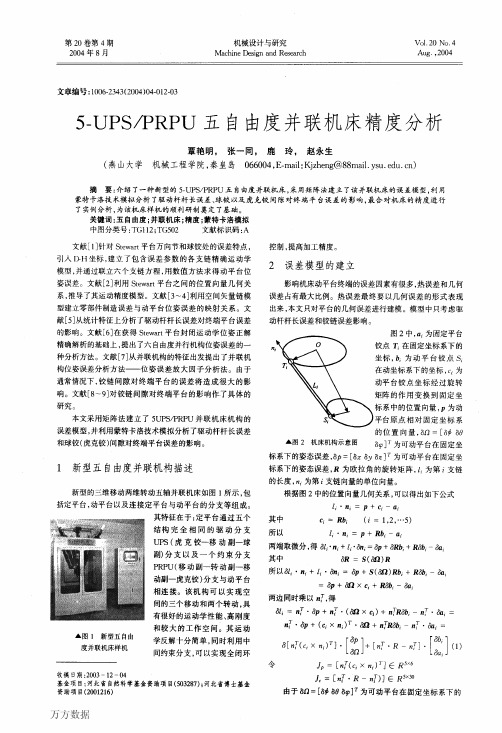
为动平台铰点s在动坐标系下的坐标一为动平台铰点坐标经过旋转矩阵的作用变换到固定坐标系中的位置向?p为动平台原点相对固定坐标系的位置向?占n6声踟8妒1为可动平台在固定坐标系下的姿态误差劬融勋艿21为可动平台在固定坐标系下的姿态误差r为欧拉角的旋转矩阵z为第i支链的长度卵i为第i支链向?的单位向?
基于有限元法6-UPS并联机床模态分析

S h o o ca ia adV hclr n ier g B in ntueo eh ooy e ig10 8 , hn ) col f Meh ncl n e i a gnei , e igIs tt f cn l ,B in 0 0 C ia u E n j i T g j 1
( . 华大 学 精仪 系 , 京 10 8 2 北 京理 3大 学 机械 与车 辆3 程 学院 , 京 10 8 ) 1清 北 004; . - - - - 北 00 1
摘 要 : 章 应 用 有 限 元 法 , 一 种 6 UP 文 对 - S型 并 联 机 床 进 行 了 详 细 的 模 态 分 析 , 别 获 得 了 该 机 床 的 低 阶 分
个 伸 缩 杆 和 6个 万 向 节 的 十 字 架 ( 向 节 的 其 它 部 分 万 分 属 机 床 框 架 和 伸 缩 杆 ) 。
划 分 机 床 子 结 构 的基 本 思 想 是 : 任 意 工 作 瞬 间 , 在
个模 态 都 有 其 特 定 的 固有 频 率 、 尼 比 以 及 振 型 。 阻
它 们 不 仅 是 并 联 机 床 承 受 动 态 载 荷 结 构 设 计 过 程 中 的 重 要参 数 , 且对 于分 析 和评 价机 床 结 构 的动 态 性 能 、 而 指 导 结 构 优 化 设 计 和 操 作 空 间 的 设 计 与 分 析 、 时 控 实
制 以及 标 定 等 均 有 指 导 意 义 。本 文 应 用 有 限 元 分 析 软
中 图 分 类 号 : H1 T 4 T 2; G 3 文献标 识码 : A
T e M o a a y i o n fPKM a e n FE h d lAn l ss fa Ki n ,C IJn q a HEN Ke n ,DI n +h n NG Ho g s e g
并联机构及其应用

并联机构可以用于卫星姿态的调整, 实现卫星的快速、准确姿态控制。
医疗康复领域
手术机器人
并联机构可以用于手术机器人,实现微创手术的高精度操作。
康复设备
并联机构可以用于康复设备,帮助患者进行精准的康复训练。
军事装备领域
无人驾驶车辆
并联机构可以用于无人驾驶车辆,实现快速、准确的移动和定位。
稳定性好、可靠性高
并联机构具有较好的稳定性和可靠性, 适用于对稳定性要求较高的场合。
易于实现模块化和标准化
并联机构可以通过模块化的设计和标 准化的制造,实现快速组装和互换, 方便维修和替换。
并联机构的发展历程
起源
并联机构最早起源于机械加工领 域,用于实现高精度定位和加工。
应用拓展
随着技术的发展,并联机构逐渐拓 展到其他领域,如机器人、航空航 天、医疗器械等。
助中风或脊髓损伤患者进行康复训练。
军事装备案例
军事装备案例
并联机构在军事领域的应用主要涉及无人驾驶车辆、无人机和火炮等装备的设计和制造。 由于并联机构具有高精度和快速响应等特点,它们在执行军事任务时具有显著优势。
具体应用
无人驾驶车辆的导航和地形识别、无人机的飞行控制和火炮的快速瞄准等任务,都离不 开并联机构的精确控制。此外,并联机构还可以用于制造高精度的军事装备部件,如导
创新发展
近年来,随着新型材料、智能控制 等技术的不断发展,并联机构在结 构创新、驱动方式、控制算法等方 面取得了重要突破。
02
并联机构的类型与结构
按自由度分类
平面并联机构
具有2个自由度,通常用于平面运 动,如平面定位、加工和检测。
空间并联机构
具有3个或更多自由度,能够实现 空间运动,适用于复杂的三维操 作和制造。
并联机器人的发展、特点
基 于串联机构的机械其电机及传动系统都放在运动件上,增加了系统的惯性, 恶而串联机构的 正 解容易、逆解十分困难,由于在实时控制这些机构时要计算逆解,故并联机 构在这方面很有优势。
感谢观看
点击此处添加正文,请言简意赅的阐述观点。
美国Ingersoll公司于1987年、 美国Giddings&Lewis公司以 及英国Geodetic公司于1988 年开始进行并联机床的研制, 其中GiddingS&LewiS公司以 及Geodetic公司在芝加哥 IMTs’94国际展览会上展出 了此种机床,被誉为“本世 纪机床机构的最大变革与创 新”、“21世纪的机床”
并 点
击 此
联 处
添
机 加
正 文
器 ,
文 字
人 是
您 思
的 想
的
发 提
炼 ,
展 请
言 简
、 意
赅 的
特 阐
述
点 您
的 观 点 。
并联机器人的发展
并联机器人的并联机构是由多个相同类型的运动链在运动平台和固定平台 之间并联而成‘幻。最早的并联机械是V.E. Gough于1949年设计的轮胎压 力试验机。1965年,D.Stewart为解决飞行员飞行训练模拟问题构思了一 种三杆六自由度并联机构,并对其运动学、工作空间、控制等问题进行了 研究。
并联机器人的特点
并联机器人与串联机器人相比,其缺点是活动空间小。 活动平台的运动远远不如串联机器人手部来得灵活, 并联结构的机器人,工作空间往往只是一个厚度不大 的蘑菇形空间,位于机构的活动平台上方。表示灵活 度的末端件三维转动的活动范围一般只在60度左右。 角度最大也超不过于正负90度
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1001-2354(1999)09-0013-03新型并联机床的固有特性研究*李 兵,王知行,刘文涛,李建生(哈尔滨工业大学机械工程系,黑龙江哈尔滨 150001)摘要:新型并联机床是空间多环机构在数控机床上的应用,本文建立了该机床的弹性动力学有限元模型,并确定了机床的结构参数及几种典型的加工轨迹,经过有限元实例计算得到了机床一阶固有频率变化曲线,通过对计算结果的分析得出机床固有频率随机床结构参数和刀头姿态变化的规律。
本文的研究对在机床设计阶段提高机床的动力学性能具有重要意义。
关键词:并联机床;固有频率;有限元中图分类号:T G502.3 文献标识码:A新型并联机床是空间多环机构在数控机床上的应用,其结构原型是6-6型Stew art 平台机构,具有承载能力强、刚度大、结构简单、重量轻等较多优点。
如图1所示,并联机床主要由固定平台框架结构、可变长六支路、活动平台和动力头结构等部分组成,在六个分支中每个分支的长度变化由滚珠丝杠副实现,当机床加工工件时,动平台位姿的变化使得刀头能加工复杂曲面工件如模具、叶轮等。
此类机床正成为国内外研究者的研究热点,目前国外已有多台样机出现,国内已有多家研究单位对此类机床原型样机展开理论分析与实验研究工作,为未来的工业化奠定了基础。
图1 新型并联机床结构示意图现代数控机床正在向高速高精度方向发展,对机床进行动态设计是发展的必然,因此研究新型并联机床的固有特性具有重要意义。
本文建立了并联机床的弹性动力学有限元模型,并确定了几种典型机床加工轨迹,在此基础上研究了并联机床结构参数和刀头姿态的变化对机床固有频率的影响,得出一些重要的结论。
对机床设计中提高其动力学性能有指导意义。
1 并联机床弹性动力学有限元模型的建立如图2所示为并联机床有限元单元划分示意图,固定平台上六个球铰点为A 1,A 2,,,A 6,活动平台上六个球铰点为B 1,B 2,,,B 6,取固定平台中心点O 为整体坐标系O -xyz 的原点,y 轴垂直平分A 1A 6,z 轴垂直平台向上,x 轴符合右手定则。
固定平台上六个可变长支路中,每个支路因其结构由丝杠和螺母套筒两部分组成而划分为两个空间梁单元,分别为A 1C 1B 1、A 2C 2B 2、A 3C 3B 3、A 4C 4B 4、A 5C 5B 5和A 6C 6B 6;固定平台上有六个支柱A 1D 1、A 2D 2、A 3D 3、A 4D 4、A 5D 5和A 6D 6与地基相连被划分为六个空间梁单元;固定平台沿各铰点向中心点连线划分为六个三角形板单元;活动平台沿各铰点向中心点连线然后倍分动平台板单元而形成六个三角形弯曲板单元和六个矩形弯曲板单元;主轴部分等效为两个空间梁单元。
这样整个机床划分成为由38个单元34个节点构成的空间梁板组合结构模型。
无论对空间梁单元、三角形弯曲板单元还是矩形弯曲板单元,它们在局部坐标系下的单元弹性动力学方程可以统一写成:135机械设计61999年9月l 9 专题论文 机构学与机械动力学*收稿日期:1998-11-24;修订日期:1999-04-05基金项目:黑龙江省科委重大攻关项目作者简介:李兵(1971-),男,博士研究生。
从事机械系统动力学、机械CAD 及机械传动方面研究。
[m e ]{&q e }+[c e ]{¤q e }+[k e ]{q e }={f e }式中:[m e ]、[c e ]、[k e ])))各单元的质量阵、阻尼阵、刚度阵;{f e })))作用在单元上的体力、面力、集中力的等效节点力;{q e }、{¤q e }、{&q e })))单元节点弹性位移、节点速度、节点加速度矢量。
将单元动力学方程坐标变换到整体坐标系下,再经组集可得到整个并联机床的弹性动力学方程:[M ]{&q }+[C ]{¤q }+[K ]{q }={F }式中:[M ]、[C ]、[K ])))整体质量、阻尼、刚度矩阵;{F}、{q }、{¤q }、{&q })))整体节点力矢量、整体节点弹性位移、节点速度、节点加速度矢量。
图2 并联机床有限元单元划分示意图为了提高建模的精度和可靠性,本文根据通用有限元分析软件模型文件的格式,采用高级语言编制了有限元模型自动生成程序FEAMAG ,对单元节点划分、局部坐标系的确定、自由度的凝聚及整体模型的组集等均由分析程序自动进行,从而建立起高效可靠的并联机床弹性动力学有限元模型。
为了对机床进行固有特性分析,忽略阻尼影响得到机床无阻尼自由振动方程:[M ]{&q }+[K ]{q }={0}设结构作简谐运动,可得其自振频率方程为:|[K ]-X 2[M ]|=02 并联机床结构参数与加工轨迹的确定2.1 机床结构参数及加工轨迹曲线与方程如图3所示,并联机床的结构参数包括:固定与活动平台的半径R 、r ;固定与活动平台上球铰位置角H f 、H m ;可变长支路长度范围L min [L i [L max (i =1,2,,,6),支路长度L i 是指各支路与上下平台球铰中心的距离,为了研究方便取R 为一定值,则可变结构参数共有四个:r /R 、H f 、H m 和L ,它们的变化范围设为:r /R I {0.3~1.0},H f I {3b ~30b },H m I {3b ~30b },L I {R ~4R }。
图3 并联机床结构参数示意图取机床刀头点为机床动系参考原点,为了研究机床结构参数对机床固有频率的影响,确定以下四种刀头加工轨迹曲线:当机床三坐标加工(刀头姿态角固定为A =B =C =0b )时,加工轨迹如图4a 、b 、c 所示,当机床五坐标加工(刀轴沿工件表面法向加工)时,加工轨迹如图4d 所示。
各轨迹曲线方程分别为:对加工轨迹a:AB 段:0[x [600;y =600;z =800;BC 段:x =600;0[y [600;z =-800;对加工轨迹b :AB 段:(x -200)2+(y -600)2=2002(y \0);z =-800;BC 段:(x -600)2+(y -600)2=2002(y <0);z =-800:对加工轨迹c:AB 段:x =0;y =0;-2000[z [-500;对加工轨迹d :加工轨迹a 加工轨迹b 加工轨迹c 加工轨迹d图4 并联机床加工轨迹曲线设加工工件为一球面,球面半径为R w ,球心坐标为(0,0,z s ),则当刀轴沿工件加工点法向加工时,各段轨迹曲线为:AB 段:x =R w cos (45b )cos (U ); y =R w cos (45b )si n (U );z =Z s +R w sin (45b ); U I (0b ~90b );BC 段:x =0;y =R w cos (U ); z =Z s +R w sin (U );U I (45b ~60b );CD 段:x =R w cos (60b )cos (U ); y =R w cos (60b )si n (U );z =Z s +R w sin (60b ); U I (0b ~90b );DE 段:x =R w cos (U );y =0; z =z s +R w si n (U );U I (60b ~75b );EF 段:x =R w cos (75b )cos (U ); y =R w cos (75b )sin (U );z =Z s +R w sin (75b ); U I (0b ~90b );FG 段:x =0;y =R w cos (U ); z =Z s +R w sin (U );U I (75b ~90b );2.2 机床刀头姿态角A ,B ,C 的确定14 机构学与机械动力学专题论文 5机械设计61999年9月l 9当并联机床沿加工轨迹d五坐标加工时,机床刀头沿工件加工表面法矢量方向,因此刀头的姿态就由工件加工表面法矢量决定。
令工件待加工点法矢量为:r={(x s-x)i+(y s-y)j+(z s-z)k则其方向余弦为:{cos H cos U cos<}=r x+r+r y+r+r z+r+当机床加工时姿态角并不采用方向余弦角,因而需要确定沿定系x轴姿态角A、沿定系y轴姿态角B及沿定系z轴姿态角C。
通常刀具均为回转体,这样当机床工作时,整个机床结构将出现冗余自由度,因此令C=0,这样仅A和B需要确定。
为了确定A和B将矢量r平移到定系原点,令r 的方向是从工件中心指向刀头则只需在Z\0的范围内讨论即可。
对任一矢量r,可认为是经沿定系x 轴旋转-A角[T-A]x,然后再沿定系y轴旋转B角[T B]y得到,令z轴上一单位矢量为n=[001]T,则有:r=[T B]y[T-A]x[001]T(1)令cos H=A,cos U=B,cos<=C,将它们代入方程(1),得到:si n(-A)=Bcos(-A)si n B=Acos(-A)cos B=C求解上述方程组可根据下述情况分别进行讨论如表1所示:表1z\0y\0A I[-90b,0b]A=-arcsin(B)y\0,x\0B I[0b,90b]B=arcsin(A2/(1-B2) y\0,x<0B I[-90b,0b]B=-arcsin(A2/(1-B2) y<0A I[0b,90b]A=arcsin(B)y<0,x\0B I[0b,90b]B=arcsin(A2/(1-B2) y<0,x<0B I[-90b,0b]B=-arcsin(A2/(1-B2)特别地,当B=?1,则B=0b,A=?90b3并联机床固有特性计算结果与分析由于本文要确定机床结构参数与其固有特性的变化规律,故选取一组确定的机床截面尺寸和基本参数即可,主要有:固定平台厚度90mm,活动平台厚度50mm,公称直径为30mm的滚珠丝杠副,固定平台半径R=500mm,五坐标加工时球面半径R w=150mm,球心坐标为(0,0,-1000)等。
图5a 为加工轨迹a下固定平台与活动平台半径比r/R由0.3变化到1.0时机床一阶固有频率的变化曲线;图5b为加工轨迹b下固定与活动平台上球铰位置角H f 和H m分别由3b变化到30b时机床一阶固有频率的变化曲线;图6a为加工轨迹c下固定结构参数r/R =0.3,H f=H m=10b时支路长度由R变化到4R机床一阶固有频率的变化曲线;图6b为加工轨迹d下固定结构参数r/R=0.3,H f=H m=10b时刀头姿态角的变化对机床一阶固有频率的影响曲线。
(a)(b)图5加工轨迹a和b下机床一阶固有频率的变化曲线通过对上述计算结果的分析得出以下规律:(1)并联机床活动平台与固定平台的半径比r/R从小到大变化时机床的固有频率有下降的趋势;(2)并联机床活动平台的球铰位置角H m从小到大变化时,机床固有频率变化不明显;而机床固定平台的球铰位置角H f从小到大变化时,机床固有频率有下降的趋势;(3)当机床各支路长度由小到大变化时,机床的固有频率有明显的下降趋势;(4)当机床加工轨迹曲线在固定平台球铰所在圆以内变动时,机床固有频率变化不明显;而当机床加工轨迹曲线超出固定平台球铰所在圆以外变动时,机床固有频率有下降的趋势;(5)当机床沿工件表面法向加工时,随着机床姿态角的变化,机床固有频率变化不明显。