能轻松跳跃10米的跳蚤机器人你见过吗
跳跃机器人sandflea

总体方案设计
设计所要满足的要求: (1)总体质量尽可能的轻 (2)机械动力部分所占空间尽可能的小 (3)电机功率尽可能的小 (4)布局要合理 (5)满足强度与稳定性要求 (6)有一定的自我保护功能 (7)有一定的减震吸震作用
钟摆式弹跳装置
弹跳装置设计
弹簧弹射型
混合型
新型弹性储能机构
气动弹跳原理
重额量定:功率0.3:7减K24G速W 比=31.25
驱动支起电机型号选择
驱动前进电机型号选择
型号:R550 额定电压:DC12V 空载转速:1800r/min 额定电流:5.6A 重减量速:比0=.93K牌:优力源 电压:12V (10节5号电池串联 电池类型:镍氢 容量:2800mAh 出品商:北京优力源数码科技
使用时长:20min
Motion分析
车轮与地面间的摩擦因数设定
支架抬升电机所采用的驱动力函数
实现跳起所用的驱动力函数
直行过程中前轮的角速度变化(驱动电机类型为
抬升跳起过程中前轮摩擦力的变化
抬升跳起过程中前轮角速度的变化
抬升跳起过程中小车的各参数变化
位移
速度 加速度
Simulation-蜂窝式无气轮胎与 普通轮辐式轮胎的比较
为什么采用 蜂窝式无气 轮胎???
减震、 减重、耐
从Motion到simulation 自由落体运动求解出轮子作 与地面的接触力,将此接触 限元分析的载荷
Motion-轮子与地面接触力
结论:轮子与地面最大接触力为5119N,将此力作为下面静力分析的输入
Simulation-蜂窝式轮子与轮辐式 比较
Simulation-整体跌落分析示意图
Simulation-整体跌落分析示意图
弹跳机器人

弹跳式机器人研究综述目前,移动机器人采用的两种主要运动方式是:多轮或履带式驱动,仿生爬行或步行。
但是这两类移动机器人共同的缺陷是:它们很难一次性跃过较大的障碍物或沟渠。
随着机器人应用范围的日益广泛,机器人面临的环境也越来越恶劣,诸如考古探测、星际探索、军事侦察以及反恐活动等。
在这样的环境中,要求机器人必须具有较强的地形适应和自主运动能力。
相对于采用以上两种运动方式的移动机器人,弹跳机器人可以轻而易举地跃过与自身尺寸大小相当的障碍物或沟渠,甚至可以跃过数倍于自身尺寸的障碍物,因此更适合复杂和不可预测的环境。
特别值得一提的是在星际探索中,由于月球与火星表面的重力加速度大大低于地球表面的重力加速度(分别为地球的38%和17%)。
弹跳机器人能充分利用这个特点, 来达到扩大运动范围和节省能量的目的。
尤其在探索过程中面对的往往是未知的地形,弹跳机器人相对于其它移动机器人具有更强的地形适应能力。
因此,弹跳机器人特别适合应用于以未知、崎岖地形,低重力环境为特征的星际探索中。
早在1969年美国就有人研制弹跳机器人以用于月球探索[1],根据当时/阿波罗0号飞船登月时的数据以及后期的试验与计算,列出在月球上3种方式的比较(1)。
可见弹跳运动在星际探索中是一种非常高效的运动方式。
CaliforniaInstituteofTechnology和JetPropulsionLabo-ratory在NationalAeronauticsandSpaceAdministration的资助下,对应用于星际探索的弹跳机器人进行了研究,这个项目并且得到了美国国家科学基金的资助。
该项目从1999年起,先后研究开发出了三代弹跳机器人,其中第三代弹跳机器人在远程计算机的控制下基本实现了自主运动。
随着我国载人航天器的发射成功,登陆其它行星必然是下一步目标,弹跳机器人在其中必然会发挥巨大的作用。
1 弹跳机器人的研究现状1.1 弹跳机器人的研究起源最早的弹跳机器人为MarcRaibert于1980年在麻省理工学院机器人实验室研制的单腿弹跳机器人。
世界顶尖科技:6个世界上最厉害的机器人!

6个世界上最厉害的机器人!
【每日学机械】第125期,随着科技的发展,出现了很
机器人▲cubestormer 3 机器人
-- CUBESTORMER 3,其所用的时间只有3.253秒。
Android软件的Galaxy S4。S4手机在这里的作用是分
Cubestormer 3 与手机之间的
(约合48km/h)。这比博尔特在2009年所创造的世
9.69秒,对应23mph。 MIT官网、百科、Engadget和网易科技(小
,看见独特的自己!
6:0
不过波尔也很快发现了机器人对手的弱点,擦网球、
最终,波尔以 11:9 的
Agilus是KUKA旗下的一系列机器人,存在
6个轴线上做运动,伸展所及的最
901mm。KUKA宣称Agilus乃是世界上最快的机
今年5月18日,美的宣布将以不超过292亿元要
94.55%。截至北京时间2016年8月20日,
(我想说“美的干的漂亮”)
机器人▲robot OutRunner
可能是世界上第一种靠腿奔跑的机器人,可用于
OutRunner非常节能,其腿部装有能源储
OutRunner非
OutRunner 靠着6条以上的可旋转长腿不断的
OutRunner 可通过手机App來遥控操作,计划推出
OutRunner,Core这款采用的是塑料材质,拥有6条'
Quattro的高效率设计可节省23%的能耗。
WIFI环境下观看! ▲新松并联
6kg以上。如果在不影响精度和速度的情况下提高并联机
机器人▲ robot janken
Ishikawa Oku实验室日前研发出了一种专门
Janken Robot。Janken
昆虫仿生

当水黾运动时,其前后四条腿保持与水面接触,主要起对水黾本体 的支撑作用;当向前运动时,水黾的前后四条腿保持与水面接触,左 右两条驱动腿按相同的运动规律前后划动,不同时刻运动位置相同, 这样就能保证水黾平衡的向前运动;当拐弯运动时,如向左拐弯,水 黾前后四条支撑腿保持不动,同时左驱动腿也保持不动,只有右驱动 腿进行划动,这样就实现了水黾的向左拐弯运动。可以看出,水黾的 运动方式同划船的运动方式是相同的,因此设计的水上行走机器人将 采用椭圆形运动轨迹进行机器人驱动。
水黾机器人的发展史
1. 2004年卡内基梅隆大学的 Metin Sitt(迈汀-斯廷)教授研制出首个 具备水面行走能力的微型机器人。
2. 美国麻省理工学院的数学家约翰〃布什教授研制同水黾更为相似的 机器人模型。 3. 哥伦比亚大学的Girard(戈德)教授研制出的水上机器人。 4. 日本的中央大学研发的水陆两用的水黾机器人。
基于国内外对水黾的研究,以及国内外学者对仿生水上行走机 器人的研究,在采用圆柱体作为支撑腿下,本论文设计的水上行走 机器人也采用六条腿结构,其前后四条腿主要起支撑作用,两边两 条腿为驱动腿。 采用四条腿漂浮机构相对于整体漂浮机构具有很多优点,采用整 体作为漂浮机构,如船型,其平衡性较差;采用四条腿漂浮机构,水 上行走机器人的整体重量将分配到四条腿上,能够较好的使机器人保 持运动平衡,并且具有较大的漂浮力。
1
昆虫形 态的仿 生。
I.
2
昆虫感 觉器官 的仿生 。
3
昆虫运 动功能 的仿生 。
4
昆虫其 他特异 能力的 仿生。
形态的仿生:应用于军事和航空航天领域,例如:模仿蝴蝶色彩和 花纹的军事伪装设施 感觉器官的仿生:研究昆虫复眼电子模型以及听觉和嗅觉感受器电 子模型,并将昆虫的这类特异的感觉原理用于机器人导航系统,以 提高机器人的自主功能水平。
昆虫机器人diy详解

昆虫机器人diy详解
一、基本原理
本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
本项目虽然驱动原理比较简单,但是由于造型的差异其实分成了三款不同的机器人(分别是Ⅰ型、Ⅱ型、Ⅲ型),而且由于结构的不同也导致运动的规律和效果有所不同。
在开始的时候只是实现了基本的随着震动做不规则运动的效果,后来的升级版本中同时也给后面的Ⅱ型和Ⅲ型两款额外增加了一对会发光的眼睛。
1、驱动原理
本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
下图中左边的两个震动马达是在普通马达上接了偏心摆锤,而右边扁平的其实把马达和摆锤融为一体了,效果其实相当于左边马达竖着放而已,只不过结构更紧凑了。
本项目的Ⅰ型和Ⅱ型采用的是扁平的震动马达,而Ⅲ型采用的是普通的震动马达。
扁平震动马达的震动(幅度)效果不如普通的震动马达,但是扁平震动马达的消耗电流小,有着更强的续航能力可以持续运动的时间更长。
2、电路原理
本项目的电路非常简单,只是一个简单的电学电路,稍微有点物理电学知识的人都可以制作出来。
仿袋鼠跳跃机器人机构的动力学综合
仿袋鼠跳跃机器人机构的动力学综合近年来,仿生机器人技术受到了广泛关注。
仿袋鼠跳跃机器人作为一种仿生机器人,具有出色的跳跃能力,引起了研究人员的浓厚兴趣。
在进行仿袋鼠跳跃机器人机构的动力学综合研究时,研究人员首先需要了解仿袋鼠的跳跃原理。
仿袋鼠跳跃机器人的跳跃原理主要包括两个部分:弹跳力和姿态控制。
弹跳力是指仿袋鼠在跳跃时所产生的推动力,而姿态控制则是指仿袋鼠在空中维持平衡的能力。
在弹跳力方面,仿袋鼠跳跃机器人通过其特殊的腿部机构实现。
仿袋鼠的腿部结构非常灵活,具有弹性,能够在着地时储存能量并释放出巨大的弹跳力。
仿袋鼠跳跃机器人的腿部机构也采用了类似的设计理念,通过弹性材料和气压系统实现能量储存和释放,从而获得较高的跳跃高度。
在姿态控制方面,仿袋鼠跳跃机器人依靠其尾部来进行平衡调节。
仿袋鼠的尾部能够在空中扮演重要的稳定作用,通过改变尾部的位置和角度,能够使机体保持平衡并控制落地时的姿态。
仿袋鼠跳跃机器人的姿态控制机制也参考了这一原理,通过尾部的活动和传感器的反馈,实现机体的平衡控制。
对于仿袋鼠跳跃机器人机构的动力学综合研究,研究人员需要进行复杂的数学建模和仿真分析。
通过数学建模,可以描述仿袋鼠跳跃机器人的运动学和动力学特性,进而分析机器人的跳跃性能并优化设计。
同时,仿真分析可以模拟仿袋鼠跳跃机器人的运动过程,验证数学模型的准确性,并为后续实验提供指导。
综上所述,仿袋鼠跳跃机器人机构的动力学综合研究对于提高机器人的跳跃性能和稳定性具有重要意义。
通过深入研究仿袋鼠的跳跃原理,并结合数学建模和仿真分析的方法,可以为仿袋鼠跳跃机器人的设计和控制提供理论依据和技术支持,推动仿生机器人技术的发展。
昆虫机器人制作方法
昆虫机器人制作方法
制作昆虫机器人的方法有很多种,通常包括以下几个步骤:
1. 设计,首先需要设计昆虫机器人的外形和结构,包括身体、腿部、感知器官等部分的布局和形状。
2. 材料选择,根据设计要求,选择合适的材料,比如塑料、金属、电子元件等,用于制作机器人的外壳和内部零部件。
3. 机械结构制作,根据设计图纸,制作机器人的机械结构,包括连接杆、关节等部件,通常需要使用3D打印、铣削、激光切割等技术。
4. 电子元件安装,将电机、传感器、控制器等电子元件安装在机器人内部,并进行连线和焊接。
5. 编程控制,编写控制程序,使机器人能够根据传感器获取的信息执行相应的动作,比如行走、转向、感知环境等。
6. 测试调试,对机器人进行测试,调试程序和机械结构,确保
其能够正常运行。
需要注意的是,制作昆虫机器人需要具备机械设计、电子技术、编程等多方面的知识和技能,因此在制作过程中可能需要多个领域
的专业人士合作。
跳跃机器人的知识点总结
跳跃机器人的知识点总结一、跳跃机器人的定义跳跃机器人是一种能够进行跳跃动作的机器人,它能够通过自身的动力系统和传感器来实现在空中做出姿势调整、落地稳定等动作。
跳跃机器人通常使用内置的控制系统来实现自身姿态稳定控制,通过动力驱动和传感器反馈来实现跳跃动作的计算和执行。
二、跳跃机器人的结构和原理1. 结构:跳跃机器人通常由机械结构、动力系统、传感系统和控制系统组成。
机械结构包括骨架、关节和连接件,用于支撑和连接机器人的各个部件;动力系统包括电机、液压马达、气动马达等用于提供机器人跳跃所需的动力;传感系统包括陀螺仪、加速度计、力传感器等用于感知机器人的姿态和环境;控制系统包括微控制器、运动控制器等用于控制机器人的动作和姿态。
2. 原理:跳跃机器人的跳跃原理主要包括动力产生、动作控制和动态稳定三个方面。
动力产生通过动力系统来提供足够的能量,使机器人产生足够的推力来完成跳跃动作;动作控制通过传感系统和控制系统来感知和调整机器人的姿态和动作,使机器人在空中能够稳定地调整姿态;动态稳定通过控制系统来实现机器人在落地时的稳定性,避免由于落地造成的姿态失稳。
三、跳跃机器人的关键技术1. 动力系统技术:包括电机、液压系统、气压系统等用于提供足够的动力来驱动机器人跳跃的技术,需要满足高效、轻量、高功率等要求。
2. 传感系统技术:包括陀螺仪、加速度计、力传感器等用于感知机器人姿态和环境的技术,需要满足高精度、低功耗、抗干扰等要求。
3. 控制系统技术:包括微控制器、运动控制器等用于控制机器人动作和姿态的技术,需要满足高速、高精度、实时性等要求。
4. 机械结构技术:包括骨架、关节、连接件等机械结构的设计和制造技术,需要满足轻量、坚固、抗应力等要求。
四、跳跃机器人的应用领域1. 军事领域:跳跃机器人可以用于战场侦察、救援行动等,通过其跳跃能力可以通过复杂的地形快速移动,执行各种任务。
2. 民用领域:跳跃机器人可以用于救援、勘察、娱乐等领域,例如在地震、泥石流等自然灾害中可以用于搜救被困者。
盘点全球10大最牛仿生机器人--能跑能跳还能潜水概要

盘点全球 10大最牛仿生机器人能跑能跳还能潜水随着人工智能的快速发展,越来越多的机器人,开始走进人们的世界。
这些机器人功能不尽相同,形态也是各异,但是在人类的生活中,逐渐起到了越来越重要的作用。
今天小编为小伙伴们盘点了全球 10大最牛的仿生机器人,赶快来涨涨姿势吧!10、机器狗波士顿动力公司研制的机器狗使用电动 /液压系统,它能够室内和户外操作,这种四腿机器狗可以在崎岖地形奔跑,攀爬楼梯,当身体被踢后仍能保持身体平衡。
9、袋鼠机器人袋鼠机器人是德国费斯托公司研制一款模拟动物的机器人,它能够模拟袋鼠独特的运动特征,跳跃中能够恢复能量,存储并有效地用于下一次跳跃。
8、乌龟机器人这种外型颇似乌龟的机器人被命名为“沙滩机器人” ,是由迪斯尼研究实验室研制的, 它装配一个可收缩耙状装置和传感器,能够在沙滩中行进。
7、大象机器人大象机器人是使用 45吨可回收木材和钢铁制造的,它能一次携载 49名乘客,行走 45分钟。
6、机器鸟美国俄勒冈州立大学动力机械实验室研制一款机器鸟,它能够两腿奔跑,是移动速度最快,最敏捷的机器人,它的平衡能力较强,可以抵挡踢打和重击,甚至抵挡躲避球碰撞。
5、机器蛇日本研制的 ACM-R5H 模拟蛇,可用于搜索营救任务,以及水下环境勘测。
在机器蛇身体前端安装着无线相机,能够拍摄到清晰的图像。
4、蚂蚁机器人德国费斯托公司擅长研制模拟动物的机器人,蚂蚁机器人就是其中之一,一群蚂蚁机器人能够协同工作处理任务,类似于真实蚂蚁在一起完成一个共同任务。
3、鲨鱼机器人美国海军最新研制一款机器人叫做“幽灵游泳者” ,外型颇似鲨鱼,可以实现无人操控潜水航行,体长 1.5米,重量 45公斤,它可用于情报侦察、监测任务,以及检测船体安全性 2、猎豹机器人波士顿动力公司研制一款猎豹机器人,奔跑速度快于任何人类,可达到时速 45.5公里,能够模拟猎豹的奔跑方式。
1、狼蛛机器人Robugtix 公司研制 T8机器人,它采用 3D 打印部件组装而成,能够模拟狼蛛运动方式, 身体上安装着 26个不同电动机,每条腿上安装 3个,腹部安装 2个。
工业SCARA机械手臂简介说明
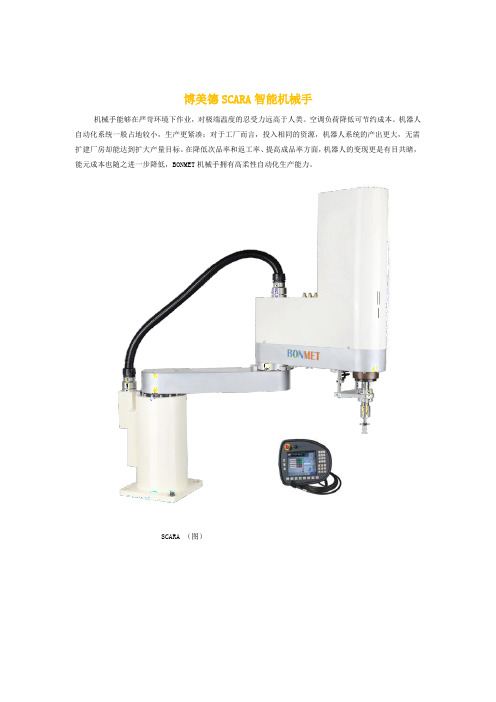
博美德SCARA智能机械手机械手能够在严苛环境下作业,对极端温度的忍受力远高于人类。
空调负荷降低可节约成本。
机器人自动化系统一般占地较小,生产更紧凑;对于工厂而言,投入相同的资源,机器人系统的产出更大,无需扩建厂房却能达到扩大产量目标。
在降低次品率和返工率、提高成品率方面,机器人的变现更是有目共睹,能元成本也随之进一步降低,BONMET机械手拥有高柔性自动化生产能力。
SCARA (图)SCARA 产品简介博美德数控高速智能SCARA 机械手是实现高精度、快速拾放料作业的机器人解决方案,具有体积小巧,速度快、安装空间小等特点。
广泛用于电子零部件组装、搬运、上下料、涂胶、点焊等行业。
通过CANopen 或EtherCAT 总线实现数据通讯,集成EUROMAP ,完成多轴联动插补。
博美德SCARA 机械手拥有无可媲美的灵活性、通用性、性价比以及速度、精度的高度稳定性;可实现多种复杂运动;可配置多台机械手同时相互协调工作。
行业应用电子 食品 生物制药 医疗器械 计算机 航空航天 日用品 LCD/LED 汽车半导体典型应用物料搬运部件组装 涂胶 上下料 视觉检验 点焊 计量分配 传送带跟踪 切断装置 医疗试验参数图示动作范围图纸:安装部详细图纸:参数图示动作范围:安装部详细:※所需行程超出以上范围时,请于本公司联系。
※循环时间及Z轴的工作范围规格不同,请于本公司联系。
博美德SCARA机械手产品设计从多方面考虑并满足了追加用途环境设计博美德SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。
另一个关节是移动关节,用于完成末端件在垂直于平面的运动。
手腕参考点的位置是由两旋转关节的角位移φ1和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z),如图所示。
这类机器人的结构轻便、响应快,例如Adept1型SCARA机器人运动速度可达10m/s,比一般关节式机器人快数倍。
它最适用于平面定位,垂直方向进行装配的作业。
新种发现跳跳研究所
新种发现跳跳研究所新种发现跳跳研究所跳跳研究所是一家专门研究和保护跳跳类生物的机构。
最近,他们在一次实地考察中,发现了一种前所未见的新种跳跳,引起了世界各地科学家的极大兴趣。
这种新种跳跳体型较小,身长不超过10厘米,全身覆盖着细密的羽毛状鳞片,看起来十分美丽。
它的腿部特别发达,而且非常灵活。
在跳跳研究所的观察中,这种新种跳跳能够以惊人的力道跳跃,几乎可以达到10米远的距离。
令人惊讶的是,它还能够在空中进行灵活的转向,控制自己的落点。
跳跳研究所决定给这种新种跳跳取名为“飞天跳跳”。
根据对飞天跳跳的研究,科学家们发现,它的腿部有一种特殊的结构,可以储存和释放弹力。
这种结构使得飞天跳跳能够在一瞬间释放出巨大的能量,从而实现高速跳跃。
此外,飞天跳跳的羽毛状鳞片也具有一定的空气动力学特性,可以减少空气阻力,使得跳跃更为顺畅。
然而,飞天跳跳的生存环境十分有限。
根据跳跳研究所的初步调查,飞天跳跳仅在某些特定地区的树木上出现,并且数量极为稀少。
由于其独特的外表和行为,飞天跳跳面临着被人类猎捕和栖息环境破坏的威胁。
因此,跳跳研究所呼吁保护飞天跳跳,保护其栖息环境,以确保其种群的繁衍和生存。
为了更好地研究和保护飞天跳跳,跳跳研究所组织了一支由科学家和保护志愿者组成的团队,开展了一系列的调查和保护行动。
他们与当地政府合作,设立保护区,限制人类活动对飞天跳跳栖息地的影响。
同时,他们还通过捕获一定数量的飞天跳跳进行繁殖和放归,希望增加其种群数量。
随着时间的推移,跳跳研究所逐渐积累了大量的关于飞天跳跳的数据和经验。
通过对飞天跳跳的研究,他们还发现了一些具有潜在价值的应用。
例如,飞天跳跳的弹力机构可以应用于机械工程领域,羽毛状鳞片的空气动力学特性可以用于改进飞行器的设计。
这为跳跳研究所带来了更多的合作机会和发展空间。
总之,新种发现的飞天跳跳给科学家们带来了巨大的惊喜和挑战。
跳跳研究所将继续致力于研究和保护飞天跳跳,希望能够更好地了解它们的生活习性和生存状态,并为保护生物多样性做出更大的贡献。
机器人跳跃原理
机器人跳跃原理嘿,朋友们!今天咱来聊聊机器人跳跃这个神奇的事儿。
你想想看啊,机器人那家伙,平时看着硬邦邦的,可它居然还能跳起来,这多有意思呀!就好像一个一直很严肃的人,冷不丁给你来个后空翻,是不是很让人惊讶?机器人跳跃的原理呢,其实就像是我们小时候玩的弹弓。
我们把皮筋往后拉,一松手,石头就“嗖”地飞出去了。
机器人也是这样,它得先储存能量,然后在合适的时机释放出来,才能完成那精彩的一跳。
这就好比我们要跑个长跑,得先攒足了劲儿,不然跑一半就没力气啦。
那机器人是怎么储存能量的呢?这可就有很多门道啦。
有的是通过电池,就像我们吃饭获取能量一样,电池就是机器人的“饭”。
还有的呢,是通过一些特殊的装置,把能量一点点积攒起来,等要用的时候,“哗”地一下放出来,厉害吧!再说说机器人跳跃的过程,那真的是像一场精彩的表演。
它要计算好力度、角度,就跟我们投篮似的,得瞄得准准的,才能投进去。
要是没计算好,那可就跳歪了,或者跳不起来,那不就尴尬啦。
你说机器人跳起来有啥用呢?用处可大啦!可以去那些我们人类不容易去到的地方呀,比如高高的山峰,深深的峡谷。
它一跳,就轻松到达了,多牛呀!而且在一些危险的环境中,机器人能代替我们去探索,这样我们不就安全多了嘛。
哎呀,想想未来,满世界都是会跳跃的机器人,它们在各种地方忙碌着,帮助我们解决各种难题,那场面,得多壮观呀!难道不是吗?总之呢,机器人跳跃原理虽然听起来有点复杂,但其实也没那么难理解。
就像我们生活中的很多事情一样,只要我们用心去观察、去思考,就能发现其中的奥秘。
所以呀,别小看了这些机器人,它们可有着大本事呢!说不定哪天,它们就能给我们带来更大的惊喜呢!。
生物学家曾做过实验,将跳蚤随意向地上一抛,它能从地面上跳起一米多高.但是如果在
生物学家曾做过实验,将跳蚤随意向地上一抛,它能从地面上跳起一米多高.但是如果在跳蚤为属于蚤目(siphonaptera)的完全变态类。
俗称革子,跳蚤是小型、无翅、善跳跃的寄生性昆虫,成虫通常生活在哺乳类动物身上,少数在鸟类。
触角粗短。
口器锐利,用于吸吮。
腹部宽大,有9节。
后腿发达、粗壮,可以轻松跳起一米多高——跟它们自身的大小比起来,相当于一个人一跃跳上八十层的摩天大楼!生物学家曾经将跳蚤随意向地上一抛,它能从地面上跳起一米多高。
但是如果在一米高的地方放个盖子,这时跳蚤会跳起来,撞到盖子,而且是一再地撞到盖子。
过一段时间后,拿掉盖子就会发现,虽然跳蚤继续在跳,但已经不能跳到一米以上了,直至结束生命都是如此。
为什么呢?理由很简单,它们已经调节了自己跳的高度,而且适应了这种情况,不再改变。
不但跳蚤如此,人也一样,有什么样的目标就有什么样的人生。
我们周围有许多人都明白自己在人生中应该做些什么,可就是迟迟拿不出行动来。
根本原因乃是他们欠缺一些能吸引他们的未来目标。
有什么样的目标,就有什么样的人生!这种对自己人生设限的现象被心理学家称为“跳蚤效应”。
哈佛大学的心理学家曾对一群年轻人做过一个长达二十五年的追踪调查。
这些被调查的年轻人的智力、学历、环境等客观条件都差不多,唯一的区别在于对未来是否有清晰且长远的目标。
二十五年后,这些调查对象的生活状况如下:3%有清晰的长远目标的人,他们几乎都成了社会各界顶尖的成功人士;10%有清晰的短期目标的人,大都生活在社会的中上层;60%目标模糊的人,几乎都生存在社会的中下层;而剩下的27%没有目标的人,则庸庸碌碌地生活在社会的最底层。
由此可见,一个人是否有清晰且长远的目标与其能否取得重大的人生成就之间存在着紧密的联系。
梭罗的《狱卒》中有这样一句话:“我不知道有什么比一个人能下定决心改善他的生活能力更令人振奋的了……要是一个人能充满信心地朝他理想的方向努力,下定决心过他所想过的生活,他就一定会得到意外的成功。
科技感十足的动物机器人
科技感十足的动物机器人作者:暂无来源:《发明与创新·中学生》 2020年第9期小花/整理在科学界,从动物身上找灵感的事屡见不鲜。
近年来,机器人研究领域也将目光投向动物界。
它们之间又将擦出什么样的火花?蟑螂机器人HAMR-JR微型机器人只有一个硬币大小,是迄今为止最灵巧的微型机器人之一。
它可以奔跑、跳跃、快速转弯,并能携带超过自身重量十倍的重物。
HAMR-JR之所以被称为“蟑螂机器人”,并不是因为长相,而是在设计上模仿了蟑螂的速度和机动性。
如今,研究团队正在从其他昆虫身上寻找灵感,希望研发出体积更小、功能更多的机器人。
蝴蝶机器人eMotionButterflies是会飞的电子蝴蝶,有一对蓝色翅膀。
有人说它是世界上最像真实生物的机器人。
蝴蝶机器人可以独立飞行,且多只蝴蝶之间不会“撞车”。
这得益于蝴蝶身体中的导航和互联系统。
蝴蝶机器人每只翼展长度为50厘米,整机质量为32克,其内部设有加速计、陀螺仪、指南针,还有两个容量为90毫安的电池,最高飞行速度可达每秒2.5米。
目前这种机器人主要应用于通信领域,有人猜测,未来,蝴蝶机器人可能会被用于窃听或传递军事情报。
鱼形机器人20世纪末,北京航空航天大学的研究团队率先设计出一款“鱼形机器人”,并拿到了1999年的“大学生挑战杯”一等奖,此后,关于它的研究一直在继续。
随着人工智能技术逐渐成熟和普及,工程学家们正在抓紧研究如何使机器鱼更智能,以便让多条机器鱼拥有真正的鱼的属性。
这种能在水中畅游的机器鱼未来可被应用于海洋资源勘探、执行军事任务和帮助维护海上石油设施等领域。
电鳗机器人名叫“艾勒姆”的水下机器人能在深海钻机上进行检查和维护,这是一项危险的工作。
它的雏形就是电鳗。
尽管电鳗机器人目前是有线的,但它的制造商康斯伯格海事公司已经找到了让机器人电源内部化的方法,从而消除其对电缆的依赖,让它看起来像一条真正的电鳗。
壁虎机器人人类在探索太空的同时也给太空留下了很多垃圾,这些垃圾对宇航员和太空飞船构成了非常大的威胁。
加州大学小型机器人介绍
加州大学小型机器人介绍
来源:宇辰网
体型小巧的机器人在当今这个讲究实效和成本的社会中颇受欢迎。
它们轻便、灵活、易部署,在很多任务中甚至比大型机器人还具优势。
来自加州大学伯克利分校仿生Millisystems实验室的研究人员发明的一系列小型机器人,能跑、能爬、能飞,甚至还可以搜索救援。
而且由于成本仅在10美元-100美元左右,所以完全可以作为一次产品使用,不用心疼。
下面就是关于这些小型无人机的介绍:
爬跳机器人
该机器人长10厘米,借助腿部的跳板跳跃高度可以达到2米,着陆后,腿部收回,翅膀打开,机器人重新调整姿势后,就可以向着目标前进。
为了适应不同的弹跳表面,机器人可以自动调整跳跃力度和速度。
快跑机器人
快跑机器人重52克,形似蟑螂,且步幅颇快,据称是同等大小机器人中速度最快的。
其上扑翼机器人可以借助快跑机器人实现起飞。
自主爬行机器人
机器人有六条腿,能控制腿的爬行角度,可以完成许多需要穿越障碍物的演习。
腿部抬高,整体变瘦,使机器人可以从狭窄的通道通过。
腿部与机身齐平,机器人变扁,可从物体下方的缝隙中通过。
组合式台阶攀爬机器人
由一前一后两个机器人组成,二者可以团结协作完成爬台阶的动作。
前者倾斜机身将前足攀上台阶,后者用力将其推到台阶上,前者再反过来通过线缆装置将后者拉上来。
会“跳跃”的新型“六足机器人”

会“跳跃”的新型“六足机器人”
据国外媒体报道,在2013年于旧金山举行的游戏开发大会上,美国宇航局的代表团展出一款新型“六足机器人”,被命名为ATHLETE,它由NASA的喷推实验室复杂开发,可以通过远程控制实现行走,甚至的跳跃和舞蹈。
来自喷推实验室的科学家维克·多罗和杰夫·诺里斯进行了演示性测试。
ATHLETE机器人实际上是一型全地形地外天体探索者,其最大特点是配备了“六条腿”,即六个负重轮,科学家在腿部也设计了灵活的关节,可以进行大范围的移动。
ATHLETE机器人拥有全地形行走能力,可装卸大型货物,宇航员可在地外天体上使用这款机器人,用它运输货物。
NASA对未来行星登陆机器人项目的开发一直在进行之中,通过全新的界面控制以推动未来机器人探索的技术,从图中可以看出,ATHLETE机器人的六个负重轮拥有极大的灵活性,可在各种复杂的地形下前进,转向也非常方便,杰夫·诺里斯希望未来登陆其他星球的宇航员可以携带这款机器人,大型设备则由机器人来转移,甚至可以建立全息控制室,每个宇航员都配备一个机器人操作平台。
ATHLETE机器人尺寸大约在13英尺,可装卸大型货物,可爬上坡度为36度的斜面,科学家设计的六个全向负重轮可相互配合,保证稳定性。
喷推实验室的科学家维克·多罗是本次任务的首席,他认为机器人导航和灵巧控制应该是重要的设计领域,此外,多罗还参与设计机器人操作的软件编写,完成15个空间无人探测器的相关研发工作。
【hellorobot】你好,机器人!
微信公众号:hellorobot 微信二维码。
毛毛虫仿生爬行机器人
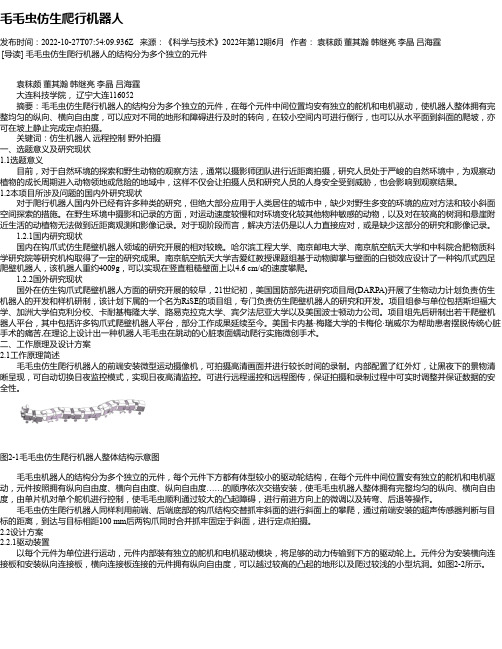
毛毛虫仿生爬行机器人发布时间:2022-10-27T07:54:09.936Z 来源:《科学与技术》2022年第12期6月作者:袁秣颇董其瀚韩继亮李晶吕海霆[导读] 毛毛虫仿生爬行机器人的结构分为多个独立的元件袁秣颇董其瀚韩继亮李晶吕海霆大连科技学院,辽宁大连116052摘要:毛毛虫仿生爬行机器人的结构分为多个独立的元件,在每个元件中间位置均安有独立的舵机和电机驱动,使机器人整体拥有完整均匀的纵向、横向自由度,可以应对不同的地形和障碍进行及时的转向,在较小空间内可进行倒行,也可以从水平面到斜面的爬坡,亦可在坡上静止完成定点拍摄。
关键词:仿生机器人远程控制野外拍摄一、选题意义及研究现状1.1选题意义目前,对于自然环境的探索和野生动物的观察方法,通常以摄影师团队进行近距离拍摄,研究人员处于严峻的自然环境中,为观察动植物的成长周期进入动物领地或危险的地域中,这样不仅会让拍摄人员和研究人员的人身安全受到威胁,也会影响到观察结果。
1.2本项目所涉及问题的国内外研究现状对于爬行机器人国内外已经有许多种类的研究,但绝大部分应用于人类居住的城市中,缺少对野生多变的环境的应对方法和较小斜面空间探索的措施。
在野生环境中摄影和记录的方面,对运动速度较慢和对环境变化较其他物种敏感的动物,以及对在较高的树洞和悬崖附近生活的动植物无法做到近距离观测和影像记录。
对于现阶段而言,解决方法仍是以人力直接应对,或是缺少这部分的研究和影像记录。
1.2.1国内研究现状国内在钩爪式仿生爬壁机器人领域的研究开展的相对较晚。
哈尔滨工程大学、南京邮电大学、南京航空航天大学和中科院合肥物质科学研究院等研究机构取得了一定的研究成果。
南京航空航天大学吉爱红教授课题组基于动物脚掌与壁面的白锁效应设计了一种钩爪式四足爬壁机器人,该机器人重约4009g,可以实现在竖直粗糙壁面上以4.6 cm/s的速度攀爬。
1.2.2国外研究现状国外在仿生钩爪式爬壁机器人方面的研究开展的较早,21世纪初,美国国防部先进研究项目局(DARPA)开展了生物动力计划负责仿生机器人的开发和样机研制,该计划下属的一个名为RiSE的项目组,专门负责仿生爬壁机器人的研究和开发。
斯帕特名词解释
斯帕特名词解释
斯帕特(Spot)是一种四脚机器人,由美国波士顿动力公司研发。
斯帕特主要以机械驱动、电池供电,具有高度可移动性和灵活性。
斯帕特机器人的外形类似一只狗,身体由铝合金和碳纤维构成,具有较强的抗冲击性能。
它的四肢被设计成类似狗腿的结构,每根腿上都装有自由度高的关节,可以实现多种动作和姿态。
斯帕特的头部配备有多种传感器和相机,用于感知周围环境。
斯帕特机器人的移动方式类似于犬类,可以通过四肢行走、奔跑、爬行等方式在不同地形上移动。
它还可以灵活地跳跃、转身、躲避障碍物等,具有较高的机动性和应对能力。
斯帕特的移动速度可以根据需要进行调整,最高时速可达5.2公里。
斯帕特机器人的主要用途是在危险、复杂或恶劣环境中代替人类进行工作。
比如,斯帕特可以用于勘察灾区、执行搜救任务、巡逻保安、检查管道、运送重物等。
它还可以搭载传感器和设备,实现远程监测、数据采集、图像识别等功能。
斯帕特的操作系统具有较高的智能化程度,可以通过自主学习和感知来实现自主控制。
它可以根据环境和任务的需求,自主决策并执行相应动作。
斯帕特还可以与其他机器人和人类进行协作,实现更复杂的任务。
斯帕特机器人的研发和应用具有广阔的前景。
未来可能会在各个领域中得到应用,如工业生产、建筑施工、农业、医疗等。
斯帕特的出现将进一步推动机器人技术的发展,为人类创造更多便利和安全的工作环境。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
能轻松跳跃10米的跳蚤机器人你见过吗
众所周知,波士顿动力公司(Boston Dynamics) 最早是在美国军方的国防高等研究计划署(DARPA)的资助下起家的。
它不仅为美军成功开发出了可适应崎岖地形的四足机器人“Big Dog”,而且还为美国海军开发了取代飞机弹射任务训练影片的“DI-Gug”,这是一套人物互动式的3D电脑模拟系统。
此外波士顿动力还曾专门为美国陆军的快速装备部队开发过一款重约11磅(约5公斤)的迷你机器人“Sand Flea”(沙跳蚤),虽然身材娇小,但它的本领却不容小视。
Sand Flea
这款波士顿动力于2012年开发完成的沙跳蚤是一款11磅重(约5公斤)的迷你机器人,它虽然身材矮小,但是身体的下方却暗藏玄机,正常情况下它就像是一个普通的遥控汽车,但是当遇到难以跨越的障碍物时它可以跳跃到30英尺(约10米)高的空中,这样的跳跃高度可以轻松跨越复合墙、屋顶、楼梯、二楼窗户等障碍物。