基于ARM的辅助倒车系统的设计
基于ARM的一种智能倒车系统
基于ARM的一种智能倒车系统摘要:本文介绍了以m0为核心的arm lpc11c14的主要功能特性,给出了用lpc11c14和tm8835组成的电路来设计智能倒车系统的具体办法。
本智能倒车系统应用在带有电子稳定功能的汽车上。
关键词:lpc11c14;tw8835;can总线;智能倒车系统中图分类号:tp31 文献标识码:a 文章编号:1674-7712 (2013)02-0046-02随着人们生活水平的提高,汽车的普及率越来越高,越来越多的人享受汽车带来的便利,但开车容易,倒车,停车难。
面对日益拥挤的停车位,如何能安全方便地把车停在规定的停车位,对有些车主来讲是一个难题。
智能倒车系统能有效地解决这个难题。
其工作原理是从原车obd-ii数据检测口通过can总线协议读取原车方向盘角度传感器的方向盘角度数据,雷达数据,根据车长车宽规划出倒车的运动轨迹线,并将此轨迹线和倒车摄像头的影像合成,输出在屏幕上显示,以此来辅助车主轻松泊车。
一、系统设计本系统主要由两大模块组成,一个是系统控制模块,一个是图像处理模块。
系统控制模块由nxp公司生产的lpc11c14完成,图像处理模块由techwell公司生产的tw8835完成。
(一)芯片的选型本系统是车载系统,所以在选择芯片时要考虑到功耗问题,集成度高,体积小的芯片是首选,同时图像的清晰度也是考虑的重点。
lpc11c14是nxp公司生产的运行速度高达50mhz,采用cortex-m0内核的32位微处理器,m0系列的arm是目前市面上最小巧,最低功耗及最有能效的arm。
它内含32kb片内flash程序存储器、8kb 片内sram、可通过片内引导装载程序软件来实现在系统编程(isp)和在应用编程(iap),方便了系统的调试;集成了pmu (电源管理单元),能最大降低系统的功耗;集成了1路can控制器,简化了传统单片机外接can控制器和can收发器的复杂外围电路内部,外部只需要接一个can收发器就可以完成对can数据的读取;rom集成供can和canopen标准使用的初始化和通信的api函数,用户可直接调用,兼容can2.0a/b,传输速率高达1mbit/s,能为can设备节点提供强大的信息和数据处理能力,使得can通讯模块的设计更加方便。
基于ARM的防汽车追尾碰撞系统的设计
齐齐哈尔大学毕业设计(论文)题目基于ARM的防汽车追尾碰撞报警系统的设计学院通信与电子工程学院专业班级通信工程092班学生姓名指导教师成绩2013年6月17号摘要随着我国人民生活质量的的提高以及汽车工业的发展,汽车似乎已经融入每个百姓的家庭中,当然,事物都有双面性,于此同时发生了好多交通事故,其中追尾事故是最严重的,本文介绍了关于ARM嵌入式微控制器的性能和特点,设计了以其为核心技术的一种低成本、高精确度、微型化、数字显示的汽车防碰撞追尾报警器。
该防撞报警器将ARM嵌入式控制器的实时控制及数据处理功能与传感器技术相结合,系统主要由处理器、控制电路、传感器组、存储器、摄像头、显示屏组成。
超声波可检测汽车运行中后方障碍物与汽车的距离,传送给处理器,存储器存储视频数据然后通过显示屏装置显示后方的实时路况,并由发声电路根据距离远近情况发出警告声。
该设计提高了汽车的安全性能,对汽车倒车追尾事故的预防具有重要的意义。
关键词:ARM嵌入式控制器;追尾;防撞AbstractWith the improvement of people's life quality and the development of auto indust ry, cars have been integrated into each peoples’family,of course, everything has a doub le side, a lot of traffic accident happened at the same time,rear-end collision is one of the most serious problems among them.This paper introduces the properties and cha racteristics of ARM embedded microcontroller controller,then use it as the core techn ology to designed a low cost, high precision, miniaturization, digital display car collis ion alarm system.The anti-collision alarm combine the ARM embedded controller real-t ime control and data processing function to sensor technology,system is mainly compo sed of a processor and a control circuit, sensor group, memory, camera , display scree n.Ultrasonic can detection the distance between movement of the car and roadblock,tra nsmitted to the processor,storage store video data,then display the real-time traffic behi nd through the display screen,and sound circuit raise the alarm according to the distan ce.The design improve the safety performance of the car,and it is of great significance to prevent car reversing collision.Keywords:The ARM embedded microcontroller controller; Collision; Collision avoidanc e目录摘要 (I)Abstract .............................................................................................................................. I I第1章绪论 (1)1.1 研究背景 (1)1.2 研究意义 (1)1.3 研究的现状 (2)第2章系统的总体设计 (3)2.1 系统设计思想和目标 (3)2.2 总体方案 (3)2.3 CMOS图像传感器的分类 (4)2.4 CMOS图像传感器工作原理 (5)2.5 视频的采集方案 (5)2.6 视频处理芯片的分析 (6)2.7 视频的压缩与传输方案 (6)2.8 超声波测距方案 (7)第3章防汽车追尾碰撞系统硬件设计 (8)3.1 硬件系统的构成 (8)3.2 STM32F103RCT6主控系统硬件设计 (8)3.2.1 最小微控制器系统设计 (9)3.2.2 石英晶振电路的设计 (9)3.2.3 复位电路的设计 (10)3.2.4 电源电路的设计 (10)3.2.5 调试电路的设计 (11)3.2.6 启动配置电路电路的设计 (12)3.3 摄像头信号采集的设计 (12)3.4 视频传输电路的设计 (13)3.6 超声波电路的设计 (14)第4 章防汽车追尾碰撞系统软件设计 (17)4.1 程序设计流程图 (17)4.2 KELL软件的介绍 (17)4.3 图像采集与处理 (18)4.3.1 摄像头的驱动 (18)4.3.2 图像采集 (20)4.4 视频显示系统 (22)第5章系统的调试及误差分析 (23)5.1 系统的硬件调试 (23)5.2 系统的软件调试 (24)5.3 系统的误差分析 (25)结论 (30)参考文献 (1)附录1 (2)附录2 (3)附录3 (4)致谢 (22)第1章绪论1.1 研究背景目前我国公路的总长度已经是世界第二,其带来了庞大的经济利益和国家之间的贸易。
基于Stm32的倒车雷达系统(Proteus+代码)
设计报告——题目名称:基于STM32的倒车雷达系统一、题目要求使用STM32F401VE芯片为核心,添加超声波测距模块、DHT11温湿度检测模块、串口打印模块等,实现测距报警、温湿度检测并显示等功能。
二、设计目的随着人们生活水平质量的日益提高,私家车现在十分的普遍了,但是道路上行驶的车辆越来越多,由此引发的交通问题也值得人们关注。
在开车行驶的过程中,车辆会有很多的视野盲区,无法观察到前后的障碍物,导致交通事故频发。
倒车雷达是汽车泊车安全辅助装置,能够以声音或者更为直观的显示,告知驾驶员在视野盲区外的障碍物的信息,以降低驾驶者在倒车时出现事故的概率。
温湿度检测模块可以用来检测汽车内外环境的温湿度,以便于在车内了解实际的温湿度数据,让驾驶者能够更为灵活的使用空调或者加热设备,来调整汽车内的温湿度,保证了汽车内的环境适宜,给驾驶者和乘坐者一个更为舒适的环境。
三、设计原理(1)系统整体设计图1、系统整体设计框图将系统框图搭建完成后接下来对模块进行分别的设计,来完成最终的效果。
(2)温湿度检测模块图2、温湿度检测模块设计框图温湿度检测模块使用的是DHT11数字温湿度传感器,所以只需要通过STM32芯片对数据位进行读取,不需要经过AD转换的操作,使用起来比较方便,将获取到的数据显示到八位数码管上以提供观察,使得更为直观,并且串口也有相关的数据进行打印。
(3)HCSR04超声波测距模块图3、超声波测距模块设计框图超声波测距模块使用了HCSR04超声波测距器件,该器件通过TR触发测距,通过ECHO得到高电平时间,最终通过公式计算出距离。
(4)报警距离改变模块图4、报警距离改变模块设计框图通过两个按键,将所预设的标注距离来进行改变,通过使用不同的预设距离来对不同的实际情况进行一个调整,以满足在不同情况下的需求,保证其灵活性。
四、设计内容4.1设计方案通过四个按键来进行不同功能之间的进入,使用标志位来判断不同的按键按下,使得在不同功能之间的切换。
基于单片机的倒车系统设计
毕业论文(设计)基于单片机的倒车系统设计学生姓名:王彤指导教师:姜凤娇副教授专业名称:电子信息工程所在学院:信息工程学院2015 年6 月目录摘要 (I)Abstract ............................................................................................................. I I 第一章前言.. (1)1.1研究目的和意义 (1)1.2国内外发展现状 (1)1.3本文研究的主要内容 (1)第二章系统硬件电路的设计 (2)2.1系统总体方案设计 (2)2.2系统相关器件的介绍 (2)2.3系统硬件方案的设计 (12)第三章系统软件方案的设计 (17)3.1主程序设计及其流程图 (17)3.2超声波测距的计算 (18)3.3程序的主要算法 (20)第四章系统误差分析及解决方案 (25)4.1影响超声波探测的因素 (25)4.2超声波测距的误差分析 (25)4.3误差解决方案 (26)结论 (29)致谢 (30)参考文献 (31)附录 (32)摘要随着交通运输业进入一个兴盛的时代,以及社会经济技术水平不断地提高,汽车的数量日益增加,呈现出大幅增长的趋势。
但是就在汽车的日益普及的同时,在倒车以及停车的过程中出现的事故也越来越多。
为了减少事故的发生,具有反应灵敏、安全可靠以及成本较低的汽车防撞预警系统成为人们日益迫切的需求。
在这种情况下,在倒车以及停车具有有利作用的倒车报警器就产生了。
在本文中主要阐述了以单片机为平台设计的脉冲反射形式的利用超声波进行距离测量和红外传感循迹的系统。
此设计中采用的核心单片机芯片为STC89C52,发挥超声波和红外传感的优点,综合STC89C52单片机与利用超声波测量距离和红外传感循迹的模块。
介绍了利用超声波设计的传感器,整个电路分为了主程序以及很多的子程序模块构成,其中子程序模块包括预置、发射、接收、显示以及报警等。
基于单片机的倒车防撞报警系统的设计

基于单片机的倒车防撞报警系统的设计专业:2010级电气工程及其自动化(3)班摘要本设计的基本内容为基于AT89S52单片机的倒车防撞报警系统的设计。
主要是结合了超声波的特点和优势,将AT89S52单片机和超声波测距系统结合成一体,设计出一种稳定准确可靠地倒车防撞报警系统。
本设计的系统具有模块化和多用途的特点,因为采用了软件和硬件结合的办法。
在本文中,采用了一种简单可行的三路测距原理搭建了防撞报警系统,并且对倒车防撞系统的设计及各部分的设计原理进行详细的分析,介绍了单片机的原理,超声波测距原理,HC-SR04模块以及它们的应用。
利用这些原理,本系统最后可实现小车后方的全方位实时监控显示并报警的功能,很大程度上解决了倒车泊车的安全问题。
关键词AT89S52,超声波,多路测距,倒车防撞ABSTRACTThe basic design is based on the contents of this AT89S52 microcontroller reversing collision avoidance warning system design. Mainly a combination of ultrasound features and advantages, will combine AT89S52 microcontroller and ultrasonic ranging system as a whole, to design a stable and accurate and reliable parking proximity warning system. The system has a modular design and versatile features, because the use of software and hardware combination approach. In this paper, using a simple three-way ranging principle feasible to build a collision warning system, and the design principles of the design of each part reversing collision avoidance system to conduct a detailed analysis of the principles of the MCU, ultrasonic testing from principle, HC-SR04 module and their applications. Using these principles, the system can achieve the final round the back of the car to display real-time monitoring and alarm functions, largely solve the security problem of reversing parking.Key Words AT89S52, ultrasound, multi-ranging, reversing crash绪论在当今社会不断发展的经济和工业科学技术的不断提升,汽车已经成为大部分家庭的一个成员。
基于单片机的智能倒车系统
基于单片机的智能倒车系统摘要随着汽车工业的迅猛发展,倒车系统成为人们日常行车安全的一个重要组成部分。
基于单片机的智能倒车系统就其功能实用、体积小、价格便宜适合大规模批量生产等优点被很多汽车辅助设备生产厂家所青睐。
在本设计中首先介绍智能倒车系统的基本原理,并对几种测距方法进行分析,选择了更具性价比、更简单实用的红外测距法,然后对重点模块进行了详细描述,而整个系统最重要的测距模块的调试在本文最后进行了阐述。
关键词:智能倒车系统;红外测距法;单片机Microcontroller Based Smart Parking SystemAbstractWith the rapid development of automobile industry , reversing the system has become an important part of people's daily driving safety . Microcontroller - based smart parking system functional , small , cheap and suitable for mass production , etc. favored many automotive auxiliary equipment manufacturer . In this design, first introduced the basic principles of smart parking system , and several ranging methods of analysis, selected a more cost-effective , more simple and practical infrared distance method , then a detailed description of the key module , and the entire system debugging of the most important distance measuring module at the end of this article are described.Key Words: smart parking system ; Infrared distance method ; Microcontroller目录前言 (4)1.1设计思路 (5)1.2器材和方案的选取 (5)1.2.1 电机驱动电路选取 (5)1.2.2 显示模块选取 (6)1.2.3主控芯片选取 (6)1.2.4障碍物检测方案选取 (7)2.主要芯片介绍 (7)2.1 STC89C52RC (7)3.系统总体框架设计 (10)3.1系统框图介绍 (10)3.2系统功能介绍 (10)4.系统硬件电路设计 (11)4.1单片机最小系统 (11)4.2显示模块 (11)4.3输入模块 (12)4.4驱动模块 (12)4.5红外检测模块 (13)5.系统程序设计 (15)6.系统整体调试 (16)7.结束语 (17)参考文献 (18)前言上世纪90年代,电子产品开始应用于汽车生产领域,汽车电子产品出现在汽车发展的历史舞台。
基于ARM的防汽车追尾报警系统的开题报告

一.选题的目的及研究意义设计的内容是基于AT89C51单片机倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞报警系统。
该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
此设计采用超声波测距原理,当汽车与障碍物的距离小于所设定的安全距离时,系统能发出声光报警,并随着距离的不断缩近,报警频率不断提高。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
第四代智能倒车系统的设计与探讨——基于arm的教学平台开发

2 . 3 角度 采 集
角度采集使用 ADX L 3 4 5三轴加速度传感
器,A D X L 3 4 5 直接 输 出数字信 号,模 块与 单 片机 之间 采用 I I C通信 协议 。I I C通信 只需 要
两根线,一条时钟线 ,一条数据线 即可完成数
[ 1 】 蔡杏 山 .电子 电路 超 简单 [ M ] . 北京 : 机 械工业 出版社 , 2 0 1 3 . [ 2 】 刘火 良 , 杨森 . S T M 3 2 库开发 实战指 南 [ M 】 .
北 京 :机 械 工 业 出版 社 , 2 0 1 3 .
作 者简介
朱婷 ( 1 9 8 1 一 ) ,女 ,湖北 省随 州市人 。大学
业控制 中流 行的 S T M3 2单 片 机 , 性 能 稳 定 ,
3 . 2 光 电 测速
效率高 ,所用传感器稳定准确 ,使 用寿命长。
图 2 光 电测 速 模 块 使 用 的 是 P B 7 , 模 块 的 本 次设 计增 加 了重力 感 应遥 控。小 车会 OUT端接 P B 7 。 模块没经过 一个码盘 上的小孔, 输出不 同电平控制 。两路 P WM 输入 是根据遥 随着重力感应遥控 器的倾斜方 向和程度 ,改变 即状态跳变一次 ,遮住为高 电平 。通过 单片机 控器的倾斜程度来确定, 如果倾斜角度相对大 , 行驶方 向和速度 ,与体感游戏无二,便 于测试 外部 中断计数 ,在 1 s 时 间到 的时候计 数值清 则 P WM 占空 比也会相应增大 ,进而控 制小车 的 同 时 也 增 加 了产 品 的趣 味 性 。 零。计数值乘 以单位孔所对应 的外轮周长 即可 的行驶速度 。 1汽车测速倒车提 示系统组 成 算出 1 s内的路程 ( 即速度 )。
基于汽车倒车辅助系统的设计探讨
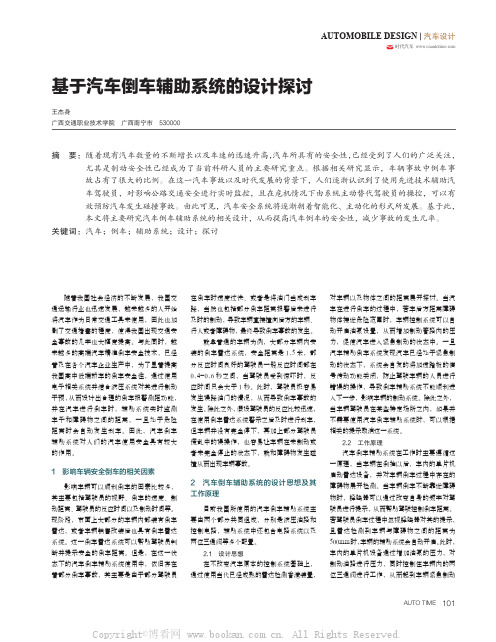
AUTOMOBILE DESIGN | 汽车设计时代汽车 基于汽车倒车辅助系统的设计探讨王杰身广西交通职业技术学院 广西南宁市 530000摘 要: 随着现有汽车数量的不断增长以及车速的迅速升高,汽车所具有的安全性,已经受到了人们的广泛关注,尤其是制动安全性已经成为了当前科研人员的主要研究重点。
根据相关研究显示,车辆事故中倒车事故占有了很大的比例。
在这一汽车事故以及时代发展的背景下,人们逐渐认识到了使用先进技术辅助汽车驾驶员,对影响公路交通安全进行实时监控,且在危机情况下由系统主动替代驾驶员的操控,可以有效预防汽车发生碰撞事故。
由此可见,汽车安全系统将逐渐朝着智能化、主动化的形式所发展。
基于此,本文将主要研究汽车倒车辅助系统的相关设计,从而提高汽车倒车的安全性,减少事故的发生几率。
关键词:汽车;倒车;辅助系统;设计;探讨随着我国社会经济的不断发展,我国交通运输行业也迅速发展,越来越多的人开始将汽车作为日常交通工具来使用,因此也加剧了交通堵塞的程度,使得我国出现交通安全事故的几率也大幅度提高。
与此同时,越来越多的高端汽车精准倒车安全技术,已经普及在各个汽车企业生产中,为了显着提高我国高中低端轿车的倒车安全性,通过使用电子相关系统并结合液压系统对其进行制动干预,从而设计出合理的倒车报警测距功能,并在汽车进行倒车时,辅助系统实时监测车子和障碍物之间的距离,一旦处于危险距离时会自动发生刹车。
因此,汽车倒车辅助系统对人们的汽车使用安全具有较大的作用。
1 影响车辆安全倒车的相关因素影响车辆可以顺利倒车的因素比较多,其主要包括驾驶员的视野、倒车的速度、制动距离、驾驶员的反应时间以及制动时间等。
现阶段,市面上大部分的车辆内都装有倒车雷达,或者车辆销售改装后也具有倒车雷达系统。
这一倒车雷达系统可以帮助驾驶员判断并提示安全的倒车距离。
但是,在这一状态下的汽车倒车辅助系统使用中,依旧存在着部分倒车事故,其主要是由于部分驾驶员在倒车时速度过快、或者是将油门当成刹车踩,当然也包括部分倒车距离报警后未进行及时的制动,导致车辆直接撞向后方的车辆、行人或者障碍物,最终导致倒车事故的发生。
基于ARM的行人检测汽车辅助系统设计
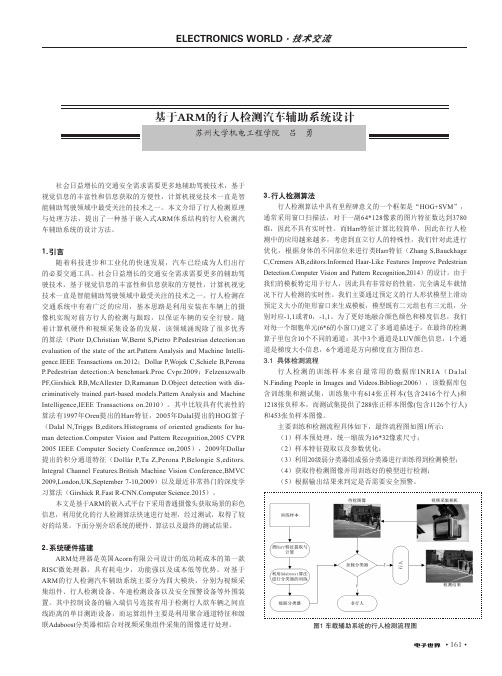
• 161•社会日益增长的交通安全需求需要更多地辅助驾驶技术,基于视觉信息的丰富性和信息获取的方便性,计算机视觉技术一直是智能辅助驾驶领域中最受关注的技术之一。
本文介绍了行人检测原理与处理方法,提出了一种基于嵌入式ARM体系结构的行人检测汽车辅助系统的设计方法。
1.引言随着科技进步和工业化的快速发展,汽车已经成为人们出行的必要交通工具。
社会日益增长的交通安全需求需要更多的辅助驾驶技术,基于视觉信息的丰富性和信息获取的方便性,计算机视觉技术一直是智能辅助驾驶领域中最受关注的技术之一。
行人检测在交通系统中有着广泛的应用,基本思路是利用安装在车辆上的摄像机实现对前方行人的检测与跟踪,以保证车辆的安全行驶。
随着计算机硬件和视频采集设备的发展,该领域涌现除了很多优秀的算法(Piotr D,Christian W,Bernt S,Pietro P.Pedestrian detection:an evaluation of the state of the art.Pattern Analysis and Machine Intelli-gence.IEEE Transactions on.2012;Dollar P,Wojek C,Schiele B,Perona P.Pedestrian detection:A benchmark.Proc Cvpr.2009;Felzenszwalb PF,Girshick RB,McAllester D,Ramanan D.Object detection with dis-criminatively trained part-based models.Pattern Analysis and Machine Intelligence,IEEE Transactions on.2010)。
其中比较具有代表性的算法有1997年Oren提出的Harr特征,2005年Dalal提出的HOG算子(Dalal N,Triggs B,editors.Histograms of oriented gradients for hu-man puter Vision and Pattern Recognition,2005 CVPR 2005 IEEE Computer Society Conference on,2005),2009年Dollar 提出的积分通道特征(Dollár P,Tu Z,Perona P,Belongie S,editors. Integral Channel Features.British Machine Vision Conference,BMVC 2009,London,UK,September 7-10,2009)以及最近非常热门的深度学习算法(Girshick R.Fast puter Science.2015)。
基于单片机汽车倒车防撞系统设计与制作

基于单片机汽车倒车防撞系统设计与制作题目:基于单片机的汽车倒车防撞系统的设计与制作毕业设计说明书(论文)中文摘要随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断的增加。
交通拥挤状况也日益严重,撞车事件也经常发生,造成了很多不可避免的人声伤亡和经济损失,面对这种情况,设计一种响应快、可靠性高并且比较经济的汽车防撞预警系统显得非常的重要。
超声波测距法是一种最常见的距离测量方法。
本文介绍的就是利用超声波测距法设计一种倒车防撞报警系统。
本文的内容是基于超声波测距的倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和51单片机结合于一体,设计出一种基于51单片机的倒车防撞系统。
本系统采用软硬结合的方法,具有模块化和多用化的特点。
倒车测距仪是一个由单片机控制的汽车泊车安全辅助装置。
该测距仪将单片机的实时控制及数据处理功能,与超声波的测距技术、传感器技术相结合,能够测量并显示车辆后部障碍物里车辆的距离,同时用间歇的“嘟嘟”声发出警报,“嘟嘟”声间隙随障碍物距离的缩小而缩短,司机不但可以直接观察到显示的距离,还可以凭听觉判断车后障碍物离车辆的远近,解除了司机倒车和起动车辆时前后左右探视所引起的困扰,并可以帮助司机扫除视野死角和视线模糊的缺陷,提高倒车的安全性。
1.2超声波测距的研究历史与发展趋势众所周知,关于超声波的研究起始于1876年,这是人类首次有效产生的高频声波,这些年来,随着超声波技术的不断深入,再加上其具有高精度,无损,非接触等优点,超声波的应用变得越来越普及,多年来已在一些领域的要应用。
超声波测距是一种传统而实用的非接触测量方法,和激光、涡流和无线电测距方法相比,具有不受外界光及电磁场等因素的影响的优点,在比较恶劣的环境中也具有一定的适应能力,且结构简单,成本低,因此在工业控制、建筑测量、机器人定位方面得到了广泛的应用。
但由于超声波传播声时难于精确捕捉,温度对声速的影响等原因,使得超声波测距的精度受到了很大的影响,限制了超声测距系统在测量精度要求更高的场合下的应用。
arm9倒车雷达

3.3.4 风险控制
做什么项目都存在风险,所以我们不保证一 定不存在风险,但尽可能的把风险降至最低。我 们的目标是实现项目的需求,但对我们而言,刚 接受做一个项目,可以说存在难度,不管是技术 上,还是管理上。我们尽自己最大的努力去完成 它。当我们发现问题及时的讨论并找出解决方案, 从自个方面寻找资料、信息,每一次都进行组内 沟通和交流,力争把项目做的好,降低项目的风 险程度。
ห้องสมุดไป่ตู้100
1
1
50
100
总价:
800
RMB
系统开发环境如下:
综上所述,由本公司开发的嵌入式 倒车雷达以及可视倒车装置是极具兼容 性和稳定性的监控系统。
三、项目管理及实施计划
3.1 实施计划 3.2 项目管理方案
3.2.1 整体管理 3.2.2 会议制度 3.2.3 临时工作调配
3.3 质量控制管理
3.3.1 质量基本规划 3.3.2 质量保证 3.3.3 质量检查 3.3.4 风险控制
1.3 公司对本项目中的认识
倒车雷达是针对日益拥挤的道路交通状况、以及在停车场、 车库、街道等比较狭窄区域,避免车与车,车与人以及车 与墙壁等障碍物发生碰撞,摩擦而出现的一种着眼于倒车 防护的汽车防撞系统。随着越来越多的高科技产品逐渐融 入了日常生活中,倒车准雷达系统发生了巨大的变化。仿 生学,声学等前沿学科的日趋成熟与实用化,赋予了倒车 雷达系统新的研究方向与意义。
3.1 实施计划
3.27~4.7 分析项目要求及需求分析,搜集、整理项 目素材,制定项目规划方案、设计概要(初步细化),修 正技术路线,理清项目实施思路,撰写《产品需求文档》, 学习所需相关知识; 4.8~5.8 项目详细设计,研发(技术人员编码及测 试),中间穿插问题资料的整理; 5.9~6.9 整机组装测试、项目优化、细化及成品运 行、、修改及完善、确认测试; 6.10~7.01 技术报告书写、部署,项目收尾工作;
基于-ARM新型倒车雷达系统设计-开题报告书
毕业设计(论文)开题报告题目:基于ARM的新型倒车雷达系统设计.参考文献【1】H. Wang, M. Toda. Curved PVDF Airborne Transducer. IEEE Trans. Ultrasonic Ferroelect Freq Contr., 1999, 46(6):679~683.【2】S. C. Ponmeroy, H. J. Dixon. Ultrasonic Distance measuring and imaging system for industrial Robot. Proc of 6th Int. Conf, Robot Vision and Sensory Controls, 1985, 10(3):121~126.【3】 C. Charles, Chang and kai - Tai Song. Ultrasonic Sense Data Integration and its Application to Environment Perception. Journal of Robotic System, 1996,13(10):663~677.【4】柳长立. 日本未来汽车的安全预警系统. 汽车电器, 1999, 1:23~24.【5】纪寿文等. 国外智能车辆研究进展. 中国交通研究与探索. 第三届全国交【6】通领域青年学者会议, , 2001.【7】余瑞芬. 传感器原理. , 航空工业, 1995:25~43.【8】杜春雷.ARM体系结构与编程【M】:清华大学,2003.【9】艳臻. 超声波的声纳原理和空化效应. 广西物理. 1996, (4):7~9.【10】于大安. 超声检测技术讲座.基础自动化. 1995, (6):53~57.【11】茂山. 超声波测距原理及实践技术. 使用测试技术.1994,(1):12~20.【12】马大猷. 声学手册. , 科学, 1983:121~155.【13】和生. 提高超声测距精度的设计. 电子产品世界. 2004, (7):86~89.【14】许天增, 许克平等. 超声传输特性和超声传感系统研究. 大学学报.【15】田燕. 超声波的物理特性及应用.现代物理知识. 1996, 11(1):24~26.。
基于单片机的汽车倒车防撞报警系统设计

警系统由控制系统 、测距子系统 (超声波发送接收系 统 )和显示报警子系统组成 。 系统电路的实现简单 , 成本低 , 功耗低 , 体积小 。 系统主要 功能是当汽车挂 入倒车挡位后 , 在显示屏上显示车距 ;在汽车距障碍 物距离小于 0.50m时 , 蜂鸣器报警 。
1 超声波及其工作原理
1.1 超声波和超声波传感器 人耳的听音范围是 20Hz~ 20kHz, 超声波是一种
的低电压 、高性能 CMOS8位单片机 , 采用高密度 、非 易失性存储技术生产 , 兼容 MCS51指令系统 , 片内置 通用 8 位 中央 处理器 和 FLASH存 储单 元 。 片 内含 4kB的可反复擦写的程序存储器和随机存储器 , 随机 存储器用于存取数据 。 2.1 控制部分的设计
控制系统方框图如图 1所示 。该系统全部由单片 机控制 , 超声波发射电路能在单片机的控制下发出超 声波 。接收电路 接收到信号之后送入单片机进行处 理 , 算出车尾与障碍物之间的距离 , 将处理结果送入 显示电路进行显示 , 再按照技术指标的要求由声光报 警电路进行报警 。
外部中断子程序流程如图 7所示 。
图 6 主程序流程 图 7 外部中断子 12期
仪器仪表 /检测 /监控
3.2 仿真验证 Proteus的 ISIS是一款 Labcenter公司研制的电路
基于ARM的无线倒车后视系统设计

基于ARM的无线倒车后视系统设计
王浩;李绍荣
【期刊名称】《电脑知识与技术》
【年(卷),期】2009(005)027
【摘要】随着经济的快速增长,我国汽车数量不断增加,停车和倒车问题成为困扰驾驶员的一大难题,针对这一问题,本文设计了一种基于S3C2440处理器的无线倒车后视系统来提高倒车和停车的效率及安全性.系统通过车尾部的摄像头采集图像信息,无线发射模块将视频信号传送至车内的接收模块并在LCD上实时显示.
【总页数】2页(P7792-7793)
【作者】王浩;李绍荣
【作者单位】电子科技大学,四川,成都,610054;电子科技大学,四川,成都,610054【正文语种】中文
【中图分类】TP301
【相关文献】
1.基于单片机的倒车后视系统设计 [J], 刘永春;王秀碧;陈彬
2.基于无线射频传输的大型车辆智能辅助倒车系统设计 [J], 吕洁印;周受钦;曹广忠
3.基于S3C2440 & WinCE的倒车后视系统设计 [J], 王宗强;刘高同;林跃;宗群
4.基于ARM的超声波倒车雷达报警系统设计 [J], 谢星;孙玲;曹海平;杨玲玲
5.Actel基于Flash架构的FPGA讲座(25) 基于Actel FPGA的倒车后视方案 [J],因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基 于 AR 的辅 助 倒 车 系统 的设 计 M
卞希 宁, 张德 芳 , 雷国亮 , 张 晓冰
( 哈尔滨理工大学 测 控技术与通信工程学 院 , 黑龙江 哈尔滨 10 8 ) 5 0 0
摘
要 : 种基 于 L C 1 1 处理 器的辅 助倒 车 系统. 一 P 23 微 系统 以 L C 1 1 处理 器 为控 制 中心 , P 23 微
Ke r s: u i a y p r i g s se ;u ta o i y wo d a xl r a k n y tm i l s n c;L r PC21 速增 长 和汽 车价 格 的持续 下
1 硬件 电路设 计
本文 所设 计 的辅 助倒 车系 统 主要 由微控 制器 电 路 、 声 波发 射 电路 、 声 波 接 收 放 大 电路 、 示 电 超 超 显
采 用超 声波 测距技 术 , 时显 示 与 障碍物 的距 离 , 实 当超过 闽值距 离时启 动报 警 , 醒 驾驶 员 引起 注 提 意 . 实验验 证 , 经 该设 计 运行 稳 定 , 据 能够 实时的进 行 显示 并且及 时启动报 警 系统 , 够满 足辅 助 数 能
倒 车 系统 的要 求.
Ab t a t T i a t l n r d c s a a x l r e e sn y tm a e n L C 1 ,u i g t e u t s n c r n i g sr c : h s r ce i t u e u i a y r v ri g s se b s d o P 2 3 i o i 1 sn l a o i a gn h r tc n q e t ip a h a" itn e fo te b rir e lt l .On e t e t r s o d d sa c s r a h d h - e h i u d s l y t e c ld sa c r m h a r s r a・ mey o e i c h h e h l itn e i e c e ,t e a
lr i tr d a d aet ed v ratnin am ss t n lr t r e t t .T ee p r nss o h ttesse i tbe h ed t a eds ae sh i e o h x e me t h w ta ytm s l.T aac n b i— i h s a
第1 6卷
第 2期
哈 尔 滨 理 工 大 学 学 报
J OUR NAL OF HARB N UNI I VERS nY CI NC OF S E E AND T HN OGY EC OL
Vo. 6 No 2 11 .
Ap .2 1 r 01
2 1 年 4月 01
收 稿 日期 : 0 9一l 2 20 1— 8
路、 报警电路. 设计结构图如图 1 所示. 1 1 超声 波 发射 电路 . 超声波发射电路如 图 2所示【 . 3 主要 由反相器 J 7 L0 4 S4和超声波发射换能器组成 , 使用 L C 11 P 23 输
出 的 4 H 0k z的方波 信号 , 一路 经反 相 器并 联送 到 T 1 的 电极 2, 路 经反 相器 串并 混联 送 到 T 一 1的电极 1 ,
关键词 : 辅助倒车 系统 ; 超声波; P 23 L C 11 中图分 类 号 : P 7 T 23 文献 标 志码 : A 文章编 号 : 0 7 2 8 ( 0 1 0 — 0 2 0 10 — 6 3 2 1 )2 0 1— 4
Th sg fAu i r v r ig Sy t m s d o e De i n o xl y Re e s n s e Ba e n ARM i a
降, 越来越多的家庭拥有 自己的汽车. 然而 , 在享受 汽车给人们带来便利的同时,由于倒 车时驾驶 员视 觉上存在死角或视线模糊而引起倒车困难而让人难 以忍受. 因此 , 人们迫切需要有倒车装置辅助驾驶员 快 速准 确地 倒 车 . 声 波测 距 技 术 ¨ 可 以测 得 准 超 J
确 的距 离 , 通过 测 距提 醒驾 驶员 注 意. 文设 计 了一 本 种 能 同时 显示 障碍 物 的准确 距 离又 能进 行报 警 提示 的辅助 倒 车系 统.
BA IN 一ig Z A e ag L IC ol n , Z A iob g nn , H NGD - n , E u—ag f i H NGXa—i n
( c ol f  ̄u cnrl ehooyadC mm nct nE gneig abnU ̄ esyo cec n eh o g , abn10 8 C ia Sh o o Me m—ot cn l n o u iao nier ,H ri ivrt f i eadT c nl y H ri 5 0 0,hn ) oT g i n i i S n o
p a e n r a i n t r e a a m.T e r q i me tt h l a o i u i a y r v r i g s se s me e ly d i e lt me a d s t t r a sh l h e ur e n o t e u t s n c a x l r e e n y tms i tv r r i s y w l e1 .
这样可 以提高超声波的发射强度. 使用上拉电阻提
基 金项 目: 黑龙江省高等教育教学改革 指导项 目( 7 8 62 ) 作者简 介 : 卞希宁 (9 o ) 女 , 工程 师 , - a : 34 9 2 .o . 16 一 , 高级 Em i a 9 3 @16 cm l4