基于LDC1314电感数字传感器的智能循迹小车控制与设计
1题自动循迹小车

1题:自动循迹小车1.任务设计制作一个自动循迹小车。
小车采用一片TI公司LDC1314或LDC1000电感数字转换器作为循迹传感器,在规定的平面跑道自动按顺时针方向循迹前进。
跑道的标识为一根直径0.6~0.9mm的细铁丝,按照图1的示意尺寸,用透明胶带将其贴在跑道上。
图中所有圆弧的半径均为为20cm±2cm。
图1 跑道示意图2.要求(1)在图1小车所在的直线区任意指定一起点(终点),小车依据跑道上设置的铁丝标识,自动绕跑道跑完一圈。
时间不得超过10分钟。
小车运行时必须保持轨迹铁丝位于小车垂直投影之下。
如有越出,每次扣2分。
((2)实时显示小车行驶的距离和运行时间。
(3)在任意直线段铁丝上放置4个直径约19mm的镀镍钢芯硬币(第五套人民币的1角硬币),硬币边缘紧贴铁丝,如图1所示。
小车路过硬币时能够发现并发出声音提示。
(4)尽量减少小车绕跑道跑完一圈运行时间。
3.说明(1)自动循迹小车允许用玩具车改装。
小车用自带电池供电运行,不能使用外接电源。
小车的尺寸为其在地面的投影不超过A4纸大小。
小车自动运行后,不得有任何人工干预小车运动的行为,如遥控等。
(2)电感传感器除了使用TI公司配发的LDC1314芯片外,也可使用LDC1000芯片或模块,数量也仅限一只。
不得使用任何其他类型的传感器用于循迹。
(3)跑道除指定的铁丝外,不得另外增加任何标记。
跑道附近不应有其他额外金属物体。
2题:平衡杆小车二、要求1.基本要求(1)控制小车在原地前后小范围运动,保持倒立杆平衡10s以上;(2)小车的倒立摆平衡时,用10cm细绳系一30g砝码,拉开45度撞击摆杆顶端,撞击方向与行车方向一致,摆杆能自动恢复平衡并保持5s以上;(3)控制小车巡迹行走在直线上(图中从A到B点)行驶并保持倒立杆平衡,100s内行驶100cm以上。
2.发挥部分(1)在完成基本要求的前提下,控制小车放在B点开始巡迹行走,以最短时间(180s)走完如图圆形部分轨迹(B-C-D-E),并保持倒立杆平衡;(2)在摆杆顶端固定一个网球,如图所示,控制小车放在B点开始巡迹行走,以最短时间(180s)走完如图圆形轨迹(B-C-D-E-B),并保持倒立杆平衡。
2024年度-智能循迹小车设计
智能循迹小车设计目录•项目背景与意义•系统总体设计•循迹算法研究•控制系统设计•调试与测试•项目成果展示•总结与展望01项目背景与意义智能循迹小车概述定义智能循迹小车是一种基于微控制器、传感器和执行器等技术的自主导航小车,能够按照预定路径进行自动循迹。
工作原理通过红外、超声波等传感器感知周围环境信息,将感知数据传输给微控制器进行处理,微控制器根据预设算法控制执行器调整小车行驶状态,实现循迹功能。
随着工业自动化的发展,智能循迹小车在生产线、仓库等场景中的应用需求不断增加。
自动化需求教育领域需求娱乐领域需求智能循迹小车作为教学实验平台,在高等教育、职业教育等领域具有广泛应用前景。
智能循迹小车可以作为玩具或模型车进行娱乐竞技活动,满足消费者休闲娱乐需求。
030201市场需求分析通过本项目的研究与实践,掌握智能循迹小车的核心技术,包括传感器技术、微控制器技术、控制算法等。
技术目标将智能循迹小车应用于实际场景中,提高生产效率、降低成本、提升产品品质等方面的效益。
应用目标通过智能循迹小车的研发与教学应用,培养学生动手实践能力、创新精神和团队协作能力。
教育意义推动智能循迹小车相关产业的发展,促进就业和经济增长,提升国家科技竞争力。
社会意义项目目标与意义02系统总体设计主控制器传感器模块电机驱动模块电源管理模块总体架构设计01020304负责接收和处理传感器数据,控制小车运动。
包括红外传感器、超声波传感器等,用于感知环境和障碍物。
驱动小车前进、后退、转弯等动作。
为整个系统提供稳定可靠的电源。
硬件选型及配置选用高性能、低功耗的微控制器,如STM32系列。
选用高灵敏度、低误差的传感器,如红外反射式传感器、超声波测距传感器等。
选用高效、稳定的电机驱动器,如L298N电机驱动板。
选用合适的电池和电源管理芯片,确保系统长时间稳定运行。
主控制器传感器模块电机驱动模块电源管理模块初始化模块传感器数据处理模块运动控制模块调试与测试模块软件功能划分负责系统启动时的初始化工作,包括硬件初始化、参数设置等。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的不断发展,智能小车作为智能交通系统的重要组成部分,在日常生活和工业生产中得到了广泛的应用。
自循迹智能小车控制系统作为小车的核心部分,其设计与实现对于提高小车的自主导航能力和运行效率具有重要意义。
本文将详细介绍自循迹智能小车控制系统的设计与实现过程。
二、系统需求分析在系统设计之前,首先需要对自循迹智能小车控制系统的需求进行分析。
该系统需要具备以下功能:能够自主循迹、避障、路径规划以及实时反馈信息等功能。
此外,还需要考虑系统的实时性、稳定性和可靠性。
在明确了需求之后,我们才能有针对性地进行系统设计。
三、硬件设计自循迹智能小车的硬件设计主要包括传感器模块、控制模块、驱动模块和电源模块等部分。
传感器模块包括红外传感器、摄像头等,用于检测道路信息和障碍物信息;控制模块采用高性能的微控制器,负责处理传感器信息并发出控制指令;驱动模块根据控制指令驱动小车前进、后退、左转或右转;电源模块为整个系统提供稳定的电源。
四、软件设计软件设计是自循迹智能小车控制系统的核心部分,主要包括算法设计和程序编写。
算法设计包括循迹算法、避障算法和路径规划算法等。
循迹算法通过分析道路信息,使小车沿着预定路线行驶;避障算法通过分析障碍物信息,使小车能够及时避开障碍物;路径规划算法根据实时道路信息和障碍物信息,为小车规划出最优路径。
程序编写采用C语言或Python等编程语言,实现算法的逻辑控制和数据交互。
五、系统实现在硬件和软件设计完成后,开始进行系统的实现。
首先,将传感器模块与微控制器连接,实现传感器信息的采集与传输;其次,编写程序实现算法的逻辑控制和数据交互;最后,对驱动模块进行控制,使小车按照预定路线行驶。
在实现过程中,需要注意系统的实时性、稳定性和可靠性。
六、实验与测试为了验证自循迹智能小车控制系统的性能,我们进行了实验与测试。
首先,在室内和室外环境下进行循迹实验,测试小车是否能够准确沿着预定路线行驶;其次,进行避障实验,测试小车是否能够及时避开障碍物;最后,进行路径规划实验,测试小车是否能够根据实时道路信息和障碍物信息规划出最优路径。
自动循迹小车(附有程序)

大学生电子设计竞赛自动循迹小车目录摘要 (1)1.方案论证 (2)1.1方案描述 (2)1.2单片机方案的比较与论证 (2)1.3编码器选择与论证 (2)1.4 LDC1000与LDC1314选择与论证 (3)1.5 OLED显示方案 (3)1.6蜂鸣器发声方案 (3)2.理论分析与计算 (3)2.1速度增量式PID计算 (3)2.2舵机位置式PID算法 (3)3.电路与程序设计 (4)3.1系统组成 (4)3.2系统流程图 (5)4.测试方案与测试结果 (5)4.1测试方案 (5)4.1.1舵机测试方案 (6)4.1.2电机测试方案 (6)4.2系统测试结果分析 (6)5.结论 (6)6.参考文献 (7)摘要本循迹小车以单片机XS128为控制核心,主要由LDC1314感应模块、稳压模块、液晶显示模块、驱动控制模块、蜂鸣器模块、编码器、舵机以及小车组成。
跑道的标识为一根直径0.6~0.9mm的细铁丝,小车在规定的平面跑道自动按顺时针方向循迹前进。
在任意直线段铁丝上放置4个直径约19mm的镀镍钢芯硬币(第五套人民币的1角硬币),硬币边缘紧贴铁丝。
实验结果表明,在直线区任意指定一起点(终点),小车都能够依据跑道上设置的铁丝标识,能够自动绕跑道跑完一圈,而且时间不超过10分钟,小车运行时始终保持轨迹铁丝位于小车垂直投影之下,小车路过硬币时能够发现并发出声音提示,显示屏上能够实时显示小车行驶的距离和运行时间。
关键词:自动循迹 LDC1314 实时显示自动循迹小车1.方案论证1.1方案描述自动循迹小车依据电磁感应原理,由单片机XS128控制,控制系统是由XS128控制模块、LDC1314感应模块、稳压模块、液晶显示模块、驱动控制模块、蜂鸣器模块、编码器、舵机以及电动小车组成的闭环控制系统。
LDC1314感应模块采集小车在跑道上位置与角度信息,利用XS128单片机处理位置与角度数据后调节舵机打角并通过PID精确算法调整后轮速度。
基于LDC1314的自动循轨机器人实验系统设计

2017年第10期 信息通信2017 (总第 178 期)INFORMATION&COMMUNICATIONS(Sum.No 178)基于LDC1314的自动循轨机器人实验系统设计郝玲,王艳春,庞健,马驰(齐齐哈尔大学通信与电子工程学院,黑龙江齐齐哈尔161006)摘要:采用STC89C52R C为核心设计一款自动循轨机器人。
地面检测采用LD C1314传感器来感应铁轨进行寻迹和搜寻其他金属障碍物体,单片机对传感器的数据进行分析来控制电机左右行驶,当检测到有除铁轨外的其他金属物体时,会发出声光提示,通过液晶显示屏实时显示运行时间,行走距离,速度以及传感器检测数值。
实验结果显示机器人沿金 属轨道运行穩定,遇到障碍物能够及时发出警报,而且能够负重匀速行驶。
关键词:自动寻轨机器人;单片机;金属传感器;P ID算法中图分类号:TP212 文献标识码:A文章编号:1673-1131( 2017 )10-0066-03Experiment system design of automatic tracking robot based on LDC1314(College O f Communication and Electrani^Qgineering,Qiqihar University,Qiqihar,Hdlong)iaiig>161006,China)Fang Jian,Wang Yanchun»Hao Ling^Vfa chiAbstract:STC89C52RC MCU is used to core to design a automatic tracing cars.Detection sraisor to track the LD C1314 ground tracing and search for other metal objects,single ctup microcomputer o f s ensor data is analyzed to control motor driving around, when detected in addition to tbe track o f o ther metal objects,will send out sound and light hint,through the LCD scFeen.The experiment results show that the car along the metal orbit is stable,encounter objects to sound an alarm in time,and can carry on the uniform load.K ey words:A utomatic tracking robot;Smgle Chip Microcamputer;Metal sensor;PID algorithm0引言目前我国的工业机器人技术发展迅速,在灭火、救援、物流、医疗等领域广泛应用,替代了人们危险、繁重的劳动,提髙 了生产率M。
《2024年自循迹智能小车控制系统的设计与实现》范文
《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的不断进步,自动化、智能化已成为现代社会发展的必然趋势。
自循迹智能小车作为智能化移动平台的一种,其应用领域广泛,如物流配送、环境监测、军事侦察等。
本文将详细介绍自循迹智能小车控制系统的设计与实现过程,包括系统架构、硬件设计、软件设计以及实验结果等方面。
二、系统架构设计自循迹智能小车控制系统架构主要包括硬件层、驱动层、控制层和用户层。
硬件层负责小车的机械结构与电子元器件的连接;驱动层通过电机驱动模块、传感器模块等实现对小车的控制;控制层负责处理传感器数据,并根据算法决策小车的行驶路径;用户层则是人与小车交互的界面,可以发送控制指令。
三、硬件设计1. 电机与驱动模块:采用直流电机和电机驱动模块,通过PWM信号控制电机的转速和方向。
2. 传感器模块:包括红外传感器、超声波传感器等,用于检测小车周围的环境信息,为循迹提供依据。
3. 控制器模块:采用单片机或微控制器作为核心处理器,负责处理传感器数据,控制电机驱动模块。
4. 电源模块:为整个系统提供稳定的电源供应。
四、软件设计1. 算法设计:采用路径规划算法、循迹算法等,实现小车的自动循迹功能。
路径规划算法可以根据环境信息规划出最优路径,循迹算法则负责控制小车按照规划的路径行驶。
2. 软件架构:采用模块化设计思想,将软件分为传感器数据处理模块、电机控制模块、路径规划模块等,便于后期维护和升级。
3. 编程语言与开发环境:采用C语言或Python等编程语言进行软件开发,使用Keil、Arduino等开发环境进行程序编写和调试。
五、控制系统实现1. 传感器数据采集与处理:通过红外传感器、超声波传感器等检测小车周围的环境信息,如道路边缘、障碍物等。
传感器将检测到的数据传输给控制器模块进行处理。
2. 路径规划与决策:控制器模块根据传感器数据和路径规划算法规划出最优路径,并发出控制指令给电机驱动模块。
3. 电机控制与驱动:电机驱动模块根据控制指令输出PWM 信号,控制电机的转速和方向,从而实现对小车的控制。
配合3D打印技术的自动循迹小车
配合3D打印技术的自动循迹小车作者:靳庆文来源:《中国科技博览》2017年第32期[摘要]本设计是一种基于单片机控制的自动控制小车系统,包括小车系统构成软硬件设计方法。
小车以89C51单片机为控制核心,利用LDC1314电感数字转换器对黑带轨迹进行检测,并将路面检测信号反馈到单片机。
单片机对采集到的信号予以分析判断,及时控制驱动电机以调整小车转向,从而使小车能够沿着黑带轨迹行驶并使小车运行时必须保持轨迹黑带位于小车垂直投影之下达到自动控制的作用。
在小车两侧安装微型高清摄像头用于拍摄周围环境,同时拍摄装置系统与微机建立联系,拍摄的图像传输到计算机中进行3D打印,以此勘察周围环境完成作业。
[关键词]STC89C51单片机,LDC1314电感数字转换器,直流减速电机,微型高清摄像头,3D打印技术中图分类号:TH857 文献标识码:A 文章编号:1009-914X(2017)32-0000-010 引言智能小车作为机器人的典型代表。
它可以分为三大组成部分:传感器检测部分、CPU、执行部分。
机器人要实现自动循迹功能,还可以扩展避障等功能,感知导引线和障碍物。
可以实现小车自动识别路线,选择正确的行进路线,并检测到障碍物自动躲避。
基于上述要求,传感检测部分考虑到小车一般不需要感知清晰的图像,只要求粗略感知即可。
3D打印机又称三维打印机(3DP),是一种累积制造技术,即快速成形技术的一种机器,它是一种数字模型文件为基础,运用特殊蜡材、粉末状金属或塑料等可粘合材料,通过打印一层层的粘合材料来制造三维的物体。
现阶段三维打印机被用来制造产品。
逐层打印的方式来构造物体的技术。
3D打印机的原理是把数据和原料放进3D打印机中,机器会按照程序把产品一层层造出来。
3D打印机与传统打印机最大的区别在于它使用的“墨水”是实实在在的原材料,堆叠薄层的形式有多种多样,可用于打印的介质种类多样,从繁多的塑料到金属、陶瓷以及橡胶类物质。
有些打印机还能结合不同介质,令打印出来的物体一头坚硬而另一头柔软。
金属丝循迹检测智能小车设计

金属丝循迹检测智能小车设计∗曾宪阳;杨红莉;郑子超【摘要】Smart car tracking steadily and fast has been a hot topic in scholars research, and smart car tracking the track formed by 0. 8 mm di-ameter wire steadily and fast has become the difficulty of research. This paper selects the STM32 high speed single chip microcomputer as con-trol core, and chooses LDC1314 metal detection combined with four groups of inductance coils to form four-line tracking sensor. According dif-ferent data parameters returned by sensors, it identifies the difference between a wire and a coin, so as to realize the tracking and alarming. A fast tracking algorithm is proposed. The experimental results show that the smart car can steadily and fast track, and when it encounters coins, it can send out sound and light alarm signal, and display real-time speed, distance and time.%智能小车稳定快速循迹一直是学者们研究的热门话题,能在直径0.8 mm左右的铁丝形成的轨迹上稳定快速循迹已成为研究的难点。
基于LDC1314的机车位置检测电路的设计
0 引言随着我国高速铁路的快速发展,对铁路运输类人才的培养需求越来越旺盛,为了更好的切近实际,让学生尽快适应职业培养需求和更直观的教学,沙盘模型教学无疑是一种最为有效的教学模式,因其直观性强,更加接近现场,但相比现场教学更加安全、便利,使得越来越多的铁路大专院校采用这种教学模式,也催生了越来越多的教学设备制造企业投入研发相关的沙盘教学模型,为了让沙盘教学模型更加的接近实际,就需要沙盘模型具备整个铁路系统的所有环节,轨道电路作为整个沙盘模型的重要组成部分之一,用于检测轨道区间车辆占用情况,同时也起到列车位置检测的作用,目前主要有两种实现方式,一种是采用干簧管检测,这种检测的方法是在钢轨相应区段的分界处安装干簧管,然后在机车模型上加装磁铁,当机车通过时,机车上的磁铁对干簧管作用,干簧管闭合的方式进行检测;另一种方式是射频卡检测方式,这种检测方式是在轨道上或侧面安装RFID卡,RFID卡内写有相关的区段信息,在机车上安装RFID读卡器,当机车通过时,RFID读卡器读取安装在轨道上(旁)的RFID卡信息的方式来获取机车位置信息。
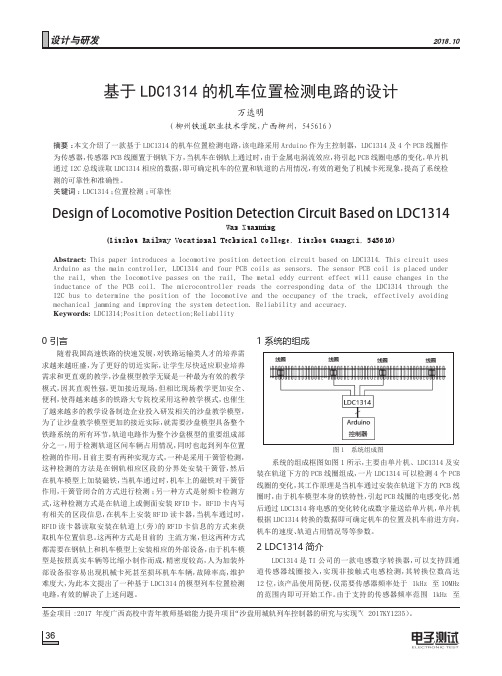
这两种方式是目前的 主流方案,但这两种方式1 系统的组成图1 系统组成图系统的组成框图如图1所示,主要由单片机、LDC1314及安装在轨道下方的PCB线圈组成,一片LDC1314可以检测4个PCB 线圈的变化,其工作原理是当机车通过安装在轨道下方的PCB线圈时,由于机车模型本身的铁特性,引起PCB线圈的电感变化,然后通过LDC1314将电感的变化转化成数字量送给单片机,单片机根据LDC1314转换的数据即可确定机车的位置及机车前进方向,机车的速度、轨道占用情况等等参数。
简介TI公司的一款电感数字转换器,可以支持四通道传感器线圈接入,实现非接触式电感检测,其转换位数高达该产品使用简便,仅需要传感器频率处于 1kHz 至10MHz 的范围内即可开始工作。
由于支持的传感器频率范围 1kHz 至mechanical jamming and improving the system detection� Reliability and accuracy�Keywords: LDC1314;Position detection;Reliability“沙盘用城轨列车控制器的研究与实现”( 2017KY1235)。
毕业设计---基于光电传感器的自动循迹智能车系统设计
摘要新一代汽车研究与开发将集中表现在信息技术、微电子技术、计算机技术、智能自动化技术、人工智能技术、网络技术、通信技术在汽车上的应用。
智能汽车是是现代汽车发展的方向。
大学生智能车比赛是智能汽车设计的一个实践平台,光电传感器的自动循迹智能车系统,采用光电传感器作为道路信息的采集传感器,单片机为控制系统的核心来处理信号和控制小车行驶。
MC9S12系列单片机在汽车电子控制领域得到广泛应用。
本课题就是利用Freescale的MC9S12XS128微控制器对智能车系统进行设计。
智能车系统设计包括硬件电路和控制软件系统的设计。
硬件系统使用专门软件Altium Designer设计。
硬件电路系统主要包括freescale单片机最小系统、电源管理系统、路径识别与检测系统、电机驱动系统。
而控制系统软件的设计主要包括单片机的初始化、PID控制算法、路径识别算法、舵机控制算法、速度控制算法。
软件设计是用Freescale公司的Codewarrior软件作为软件开发和仿真下载的平台。
最后完成了整个自动循迹智能车系统设计。
关键字:智能车;光电传感器;自动循迹;控制算法;PID;I基于光电传感器的自动循迹智能车系统设计ABSTRACTThe design of autoguiding smartcar system based onphotoelectric sensorN ew generation automobile development and researched focus on information technology, microelectronic technology, computer technology, intelligent automation technology, artificial intelligence technology, networking technology, communication technology and so on. The intelligent automobile is the direction in which the modern automobile developed.The university students intelligence vehicle competition is a practice platform in which intelligence automobile designed , we use the photoelectric sensor as gathering sensor to take path information , The microcontroller is used as the control system core ,and process the signal, and controls car to run . signal-chip microcomputer MC9S12 series be widespread utilized in the automobile electronic control domain. I use the Freescale microcontroller MC9S12XS128 to design the intelligent vehicle system. The design of intelligent vehicle system including hardware circuit and control software system. I adopt the software of electronics design Altium Designer to complete designing the hardware . Hardware circuit system mainly includes the freescale ’s Single-chip Microcomputer smallest system, the power source management system , the way recognition and the detecting system, the motor-driven system. But the control software system mainly includes Single-chip Microcomputer 's initialization, the PID control algorithm, the way recognition algorithm, the steering engine control algorithm, the speed control algorithm . It uses Freescale Corporation's Codewarrior as the software development ,the simulation and downloading…s platform in the software designing . Finally The design of auto track smartcar system based on photoelectric sensor is completed.Key words: Intelligent vehicle; photoelectric Sensor; auto track; Control algorithm ;PID;II摘要 (I)ABSTRACT ........................................................................................................................ I I 插图清单 (I)第1章绪论................................................................................................................. - 1 -1.1 毕业设计(论文)内容及研究意义(价值)............................................. - 1 -1.2 毕业设计(论文)研究现状和发展趋势..................................................... - 2 -第2章控制系统整体方案设计................................................................................... - 3 -2.1 整体设计方案概述........................................................................................... - 3 -2.2 控制系统整体方案设计................................................................................. - 4 -2.2.1 模型车硬件整体方案设计...................................................................... - 4 -2.2.2 系统软件模块分析 ................................................................................. - 7 -2.2.3 控制算法设计方案 ................................................................................. - 8 -第3章单片机最小系统模块....................................................................................... - 9 -3.1 单片机以及最小系统简介............................................................................... - 9 -3.2 MC9S12XS128最小系统设计 ...................................................................... - 9 - 第4章电源管理模块................................................................................................. - 11 -第5章路径识别模块和测速检测模块..................................................................... - 13 -5.1 路径识别模块................................................................................................. - 13 -5.1.1 光电传感器 ........................................................................................... - 13 -5.1.2 光电传感器发射与接收电路设计 ....................................................... - 13 -5.1.3 路径识别传感器布局设计 ................................................................... - 14 -5.2 测速检测模块 .......................................................................................... - 16 -第6章电机驱动模块................................................................................................. - 19 -6.1 直流电机驱动模块......................................................................................... - 19 -6.1.1 电机的工作原理 ................................................................................... - 19 -6.1.2 MC33886介绍....................................................................................... - 21 -6.1.3 PWM信号控制电机的转速.................................................................. - 22 -6.2 舵机驱动模块............................................................................................... - 23 -第7章智能车软件的设计......................................................................................... - 29 -7.1 单片机初始化................................................................................................. - 30 -7.2 PID控制算法 ............................................................................................... - 32 -7.3 路径识别算法............................................................................................... - 34 -7.4 舵机控制算法............................................................................................... - 34 -7.5 速度控制算法............................................................................................... - 36 -I基于光电传感器的自动循迹智能车系统设计第8章开发制作与调试............................................................................................. - 38 -8.1 CodewarriorV4.7软件及其应用.................................................................. - 38 -8.2 BDM for S12的使用.................................................................................... - 43 -结论和展望................................................................................................................... - 44 - 致谢........................................................................................................................... - 45 - 参考文献....................................................................................................................... - 46 - 主要参考文献摘要....................................................................................................... - 48 - 附录A ........................................................................................................................... - 50 -II插图清单图2-1 系统信息的控制流程图....................................... - 4 - 图2-2 智能车控制系统整体结构图................................... - 5 - 图2-3 系统硬件结构图............................................. - 6 - 图2-4 系统软件结构............................................... - 7 - 图3-1 最小系统原理图和PCB图.................................... - 10 - 图4-1 电源系统结构框图.......................................... - 11 - 图4-2 LM7805电路图.............................................. - 12 - 图4-3 LM7806电路图.............................................. - 12 - 图5-1 光电传感器的基本组成...................................... - 13 - 图5-2 单对红外传感器电路图...................................... - 14 - 图5-3 红外探测布局的PCB图...................................... - 16 - 图5-4 霍尔原理.................................................. - 17 - 图5-5 霍尔测速电路图............................................ - 18 - 图6-1 H桥式电机驱动电路......................................... - 20 - 图6-2 H桥电路驱动电机顺时针转动................................. - 20 - 图6-3 H桥电路驱动电机逆时针转动................................. - 21 - 图6-4 MC33886电机驱动原理图..................................... - 22 - 图6-5 舵机工作原理示意图........................................ - 24 - 图6-6 舵机输出转角与控制信号脉宽之间关系........................ - 25 - 图6-7 不同占空比的PWM波形控制的转向伺服电机状态图.............. - 26 - 图6-8 转向伺服电机控制方法图.................................... - 27 - 图6-9 舵机转角控制模块程序流程图................................ - 28 - 图7-1 光电传感器方案主程序流程图................................ - 29 - 图7-2 典型PID控制结构.......................................... - 33 - 图7-3 舵机控制流程图............................................ - 35 - 图7-4 速度控制流程图............................................ - 37 - 图8-1 CodearrierV4.7 创建新的工程窗口........................... - 40 - 图8-2 CodearrierV4.7的工程的初始设置窗口........................ - 41 - 图8-3 CodearrierV4.7的编译窗口.................................. - 42 -图8-4 BDM的PCB原理图........................................... - 43 -I第1章绪论自动循迹智能车是一个集环境感知、规划决策、自动驾驶等多种功能于一体的综合系统。
智能寻迹小车设计方案

智能寻迹小车设计方案智能寻迹小车设计方案一、项目概述智能寻迹小车是一种能够自主行走并根据黑线路径进行导航的小型机器人。
本设计方案旨在实现小车的自主控制和路径识别功能,为用户提供一个可以根据预定路径行走的智能小车。
二、技术原理智能寻迹小车的核心技术包括光电传感器模块、控制模块和驱动模块。
光电传感器模块用于感知黑线路径,控制模块用于辨识路径信号并控制小车的行走方向,驱动模块用于控制小车的轮子转动。
小车通过光电传感器模块获取黑线路径的信号,经过控制模块的处理后,驱动模块控制轮子的转动实现小车的行走。
三、硬件配置1. 光电传感器:用于感知黑线路径,采用多个红外线光电二极管和光敏二极管进行测量。
2. 控制模块:采用单片机作为控制核心,用于接收和处理光电传感器的信号,并根据信号控制车轮转动。
3. 驱动模块:采用直流电机作为驱动装置,驱动车轮的转动。
四、软件架构1. 信号处理算法:根据光电传感器模块的输出信号,设计信号处理算法,将感知到的黑线路径转化成可识别的控制信号。
2. 路径识别算法:分析感知到的黑线路径信号,识别出黑线的走向,并根据识别结果控制小车的行走方向。
3. 控制算法:根据路径识别算法的结果,控制驱动模块产生适当的电压,实现小车轮子的转动。
五、功能实现1. 自主行走功能:小车能够根据识别的黑线路径自主地行走,避免碰撞障碍物或偏离路径。
2. 路径识别功能:小车能够准确地识别黑线路径,并根据路径进行相应的控制。
3. 远程控制功能:用户可以通过无线遥控器对小车进行远程控制,包括行走方向和速度的控制。
六、性能指标1. 导航准确性:小车在正确识别黑线路径的情况下完成整个行程,保持在路径上的偏离范围小于5mm。
2. 响应速度:小车对路径信号的处理和控制反应时间小于100ms。
3. 可靠性:小车在连续行走1小时内不发生故障,并能正常完成指定的行走任务。
七、安全性考虑1. 碰撞检测:小车装配超声波传感器,能够检测前方的障碍物并自动停止行走,避免碰撞事故的发生。
自动循迹机器人(附有程序)
全国大学生电子设计竞赛自动循迹小车摘要摘要:本设计主要包括信号检测模块、主控模块、电机驱动模块。
信号检测模块采用LCD1314电感数字转换器,通过IIC总线与从机通信从而实现循迹和检测硬币。
主控电路采用MC9S12SX128单片机为控制芯片。
电机驱动模块采用L298N 专用电机驱动芯片。
信号检测模块将采集到的路况信号发送给MC9S12SX128单片机,经单片机处理过后对L298N 发出指令进行相应的调整。
单片机通过输出PWM波和对LDC1314采集的信息进行处理,来控制小车的速度及转向并实现自动循迹的功能。
关键词:智能小车,MC9S12SX128,L298N IIC总线ldc1314目录一、系统方案论证 (4)1.系统结构 (4)2.方案论证比较 (4)(1)微控制器模块 (4)(2)电机模块 (4)(3)电机驱动模块 (4)(4) 显示模块 (5)(5) 电源模块 (5)二、测控方法分析 (5)1.控制算法分析 (5)2.运动控制分析 (6)三、系统电路设计 (7)1.系统结构 (7)2.电路设计 (7)四、系统测试与分析 (8)1.测试方案 (8)2.测试条件与仪器 (8)3.测试结果 (8)(1)基本一测试 (8)(2)基本二测试 (8)(3) 基本三测试 (8)五、测试分析与结论 (9)参考文献 (9)附录1:部分源程序 (10)自动循迹小车(C题)【本科组】一、系统方案论证1.系统结构系统以MC9S12XS128单片机为主控器,以5110显示屏、L298N驱动模块、直流电机分别实现转速、时间、距离显示、驱动等功能。
使用C语言编写程序,通过速度编码器检测并读出车轮的转速,并通过触摸按键选择系统的转速模式,实现不同速度的调节。
2.方案论证比较(1)微控制器模块方案一:MC9S12XS128单片机飞思卡尔官方函数库应用简便,开发周期短,速度和功耗方面优势明显。
方案二:51单片机指令集简便,超低功耗,熟练使用开发周期长。
智能循迹小车

智能循迹小车2016年TI杯大学生电子设计竞赛自动循迹小车(C题)摘要本次设计的智能循迹小车是以单片机MSP430F5529为主控制器运用TI 公司提供LDC1314和LDC1000电感数字装换器作为循迹传感器与速度监测模块。
将检测数据传回单片机进行处理,同时,用单片机产生PWM波来控制小车的行进速度,并实时控制小车的行进状态。
另外,在小车上还扩展了LCD作为人机交互界面,以便于实时了解小车各个监测传感器的状态机小车的实时数据,由于本次设计的是自动循迹小车,整个任务过程无需人工的任何干预,故而没有进行键盘及遥控等的人工操作设备。
用多路传感器的实时监测和算法的紧密配合来保证小车的顺畅完成任务。
报告是以小车的总体设计为主要线索,包括小车的设计分析及发案论证、小车的软件设计、小车的硬件设计、以及总体的设计流程。
共分为六章xxx小结。
其中第一章主要是对小车总体设计及各个设计方案进行了论证,第二章是对小车硬件部分的设计做了详细的介绍,第三章重点叙述了软件的设计及流程和各种相关的算法,第四章介绍了我们小车设计的开发流程,第五章叙述了我们在设计过程中遇到的问题和解决方法,并对本次的设计活动做了总结报告和在本次活动中的心得。
The design of intelligent tracking car based on MCU msp430f5529 based controller using Ti provides LDC1314 and LDC1000 digital inductance loading converter as the tracking sensor and speed monitoring module. Will the detection data returned microcontroller for processing, at the same time, MCU to produce PWM waves to control the moving speed of the car, and real-time control of the car moving state. Also in the car also expanded the LCD as the man-machine interface, in order to facilitate the real-time data of real-time understanding of the car each monitoring sensor state machine car, because the design of the automatic vehicle tracking, the whole process of task without any manual intervention is required, and therefore no rowkeyboard and remote control and manual operation of the equipment. To ensure the smooth completion of the vehicle, the real-time monitoring and algorithm of the multi-channel sensor are closely combined to ensure the smooth completion of the task.The report is in the overall design of the car as the main clues, including the hardware design of the software design of the car design analysis and demonstration of incidence, the car, the car, and the overall design process. The total is divided into six chapters XXX summary. The first chapter is mainly the car overall design and various design schemes are discussed. Chapter two is, a detailed introduction of the car hardware design, in the third chapter, the author describesthe software design and the various processes and related algorithms, chapter four introducesthe development process of our car design, the fifth chapter describes the problems we encountered in the design process and the methods to solve, and of the design activities do the summary report and experience in the event.目录第一章:方案设计与分析 (8)一、设计要求 (8)二、总体设计 (9)三、方案论证 (10)1. 小车主体设计方案 (10)2. 电机设计方案 (11)3. 传感器使用设计方案 (12)4. 显示模块设计方案 (13)5. 电源设计方案 (14)四、单片机资源分配 (14)五、电源分配 (16)第二章:智能循迹小车硬件设计 (17)一、机械设计 (17)1.小车模块分布 (17)2.小车传感器位置排布 (18)3.测速计程 (19)4.小车骨架设计 (20)二、电路设计 (21)1. 驱动 (21)2. LDC1000 (23)3. 1602液晶显示 (24)4. 蜂鸣器 (25)5. 单片机 (25)三、元件清单 (27)元件 (27)数量 (27)元件 (27)数量 (27)元件 (27)数量 (27)第三章:智能循迹小车软件设计 (28)第四章:总结与心得 (31)一、开发与调试 (31)1.总体方案论证和确立 (31)2.各分立模块调试 (32)二、典型问题举例 (32)1.电感切割铁线产生电流 (32)2. (32)三、总结与展望 (33)第一章:方案设计与分析一、设计要求本次比赛要求任务是,在规定的平面自动按顺时针方向循迹前进。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的飞速发展,智能小车在物流、军事、科研等领域的应用越来越广泛。
自循迹智能小车作为其中的一种重要应用,其控制系统的设计与实现显得尤为重要。
本文将详细介绍自循迹智能小车控制系统的设计思路、实现方法及实验结果。
二、系统设计1. 硬件设计自循迹智能小车控制系统硬件主要包括:电机、车轮、控制器、传感器等部分。
其中,电机和车轮是驱动小车运动的核心部件,控制器负责处理传感器数据并发出控制指令,传感器则用于感知小车周围环境信息。
在硬件设计过程中,我们需要根据实际需求选择合适的电机、控制器及传感器。
例如,电机应具备较高的转矩和转速,以保障小车的运动性能;控制器应具备强大的数据处理能力和快速响应能力,以保证小车的循迹效果;传感器应具备较高的灵敏度和稳定性,以准确感知周围环境信息。
2. 软件设计软件设计是自循迹智能小车控制系统的核心部分。
我们采用模块化设计思想,将软件系统分为传感器数据处理模块、路径规划模块、控制算法模块等。
传感器数据处理模块负责收集并处理传感器数据,为路径规划模块提供准确的环境信息。
路径规划模块根据传感器数据和预设的循迹算法,规划出最优路径。
控制算法模块则根据路径规划结果,发出控制指令给电机,驱动小车按照规划的路径行驶。
三、实现方法1. 传感器选择与数据处理我们选择了红外线传感器作为循迹的主要传感器。
红外线传感器可以感知地面的黑白线,将循迹线转化为电信号,为路径规划提供依据。
同时,我们还选用了超声波传感器和摄像头等设备,用于感知小车周围的环境信息,提高循迹的准确性和安全性。
在数据处理方面,我们采用了数字滤波技术,对传感器数据进行处理,以消除噪声干扰,提高数据的准确性。
此外,我们还采用了卡尔曼滤波算法对位置信息进行融合,以提高循迹的稳定性。
2. 路径规划与控制算法路径规划模块采用了一种基于A算法的循迹算法。
A算法是一种常用的路径规划算法,具有较高的搜索效率和准确性。
《2024年自循迹智能小车控制系统的设计与实现》范文

《自循迹智能小车控制系统的设计与实现》篇一一、引言随着人工智能技术的发展和广泛应用,智能小车系统已经逐渐成为了现代自动化和智能化领域的重要分支。
本文旨在介绍一款自循迹智能小车控制系统的设计与实现过程,从系统需求分析、硬件设计、软件设计、实现与测试等方面详细阐述其设计思路和实现方法。
二、系统需求分析自循迹智能小车控制系统主要应用于自动导航、避障等场景,因此其需求主要包括以下几个方面:1. 能够在各种复杂环境中实现自动导航和避障功能;2. 具备较高的稳定性和可靠性,能够适应不同路面条件;3. 控制系统应具有较高的智能化程度,便于用户操作和维护;4. 系统的硬件和软件设计应具有良好的可扩展性,方便后续升级和维护。
三、硬件设计自循迹智能小车控制系统的硬件设计主要包括电机驱动模块、传感器模块、主控模块等部分。
1. 电机驱动模块:采用直流电机和电机驱动器,通过PWM 信号控制电机的转速和方向,实现小车的运动控制。
2. 传感器模块:包括红外传感器、超声波传感器等,用于检测小车周围的环境信息,实现自动导航和避障功能。
3. 主控模块:采用单片机或微控制器作为主控芯片,负责控制小车的运动和传感器数据的处理。
在硬件设计过程中,需要充分考虑电路的稳定性和抗干扰能力,以及各个模块之间的接口兼容性和通信协议。
四、软件设计自循迹智能小车控制系统的软件设计主要包括操作系统、算法设计、程序设计等部分。
1. 操作系统:采用嵌入式操作系统或实时操作系统,以保证系统的稳定性和实时性。
2. 算法设计:包括导航算法、避障算法等,用于处理传感器数据和控制小车的运动。
其中,导航算法可采用基于路径规划的算法或基于视觉识别的算法;避障算法可采用基于距离阈值的算法或基于机器学习的算法。
3. 程序设计:包括主程序、中断程序、通信程序等,负责控制系统的整体运行和各个模块之间的协调。
在程序设计过程中,需要充分考虑代码的可读性、可维护性和可扩展性。
五、实现与测试在完成硬件和软件设计后,需要进行系统的实现与测试。
《2024年自循迹智能小车控制系统的设计与实现》范文
《自循迹智能小车控制系统的设计与实现》篇一一、引言随着科技的发展和社会的进步,自动化、智能化设备越来越普及。
自循迹智能小车控制系统就是这一技术应用的典型案例。
该系统采用先进的控制算法和传感器技术,实现小车的自主寻迹、避障和导航等功能。
本文将详细介绍自循迹智能小车控制系统的设计思路、实现方法以及应用场景。
二、系统概述自循迹智能小车控制系统主要由硬件和软件两部分组成。
硬件部分包括电机、车轮、电池、传感器等;软件部分则包括控制系统算法、路径规划算法等。
该系统通过传感器获取环境信息,利用控制系统算法对小车进行控制,实现自主寻迹、避障和导航等功能。
三、系统设计1. 硬件设计硬件部分包括电机、车轮、电池、传感器等。
电机和车轮负责小车的运动,电池为小车提供动力,传感器则负责获取环境信息。
传感器包括红外传感器、超声波传感器等,用于检测前方的障碍物和路线。
此外,还需要一个主控芯片来处理传感器信息和控制电机。
2. 软件设计软件部分主要包括控制系统算法和路径规划算法。
控制系统算法负责处理传感器信息,根据环境变化调整小车的运动状态。
路径规划算法则负责规划小车的行驶路径,避免碰撞和偏离路线。
此外,还需要一个友好的人机交互界面,方便用户对小车进行控制和监控。
四、实现方法1. 传感器信息获取传感器通过检测前方障碍物和路线的信息,将数据传输给主控芯片。
主控芯片对传感器数据进行处理,提取出有用的信息,如障碍物的位置、大小、速度等。
2. 控制系统算法实现控制系统算法根据传感器信息,判断小车的运动状态,如前进、后退、左转、右转等。
然后通过控制电机,调整小车的运动状态,使其能够顺利地沿着路线行驶。
3. 路径规划算法实现路径规划算法根据环境信息和目标位置,规划出一条最优的行驶路径。
在行驶过程中,小车会根据实时环境信息对路径进行调整,避免碰撞和偏离路线。
4. 人机交互界面设计人机交互界面需要具备友好的操作界面和丰富的功能。
用户可以通过界面控制小车的运动状态和导航目标,同时也可以实时监控小车的运行状态和环境信息。
基于LDC1000电感数字传感器的自动循迹智能小车控制系统设计

Ab s t r a c t : Au t o ma t i c s ma r t ra t c k i n g c a r u s e s s t e e r i n g e n g i n e t o mo v e LDC1 0 0 0 b a c k a n d f o r t h t o s c a n a f a n ・ s ha p e d re a a , d e t e c t s s i g n a l s a n d s e n d s t h e m t o S TM 3 2 F4 0 7 VGT6 mi c r o c o n t r o l l e r f o r p r o c e s s i n g, t h u s a c c u r a t e l y c o n ro t l s t wo DC mo t o r s s p e e d nd a l i g h t s o u n d s y s t e m t o r e a l i z e wi r e t r a c k t r a c k i n g a n d c o i n s d e t e c t i o n . Me n wh a i l e t h e s ma r t ra t c in k g C r a a d o p t s
基于电感传感器的自动循迹小车系统设计

基于电感传感器的自动循迹小车系统设计蔡力坚;郭业才【摘要】A system of intelligent car is controlled by MSP430F169 microcontroller to realize the car automatic tracking function,inductive sensors are used for data acquisition.The car is made up of coupling isolation motor drive module,geared motor modules,buzzer sound module,LCD module,encoder module,Bluetooth module,battery module.Itis a four-wheel driven vehicle,driven by microcontroller which outputs variable pulse signal,and can change steering and speed by DCmotor.Microcontroller can continually scan four-channel data outputted by LDC1314 and control the car to complete tracing action.If an obstacle is detected,buzzer module yields voice prompt.It uses timer module for precise timing,uses encoder speed detector to detect the car speed,the elapsed time of the car and driving distances can be displayed on the LCD screen.This paper seeks to complete the system design in high precision and low power consumption.%设计了一种基于电感传感器的自动循迹小车系统,该系统以MSP430F169为主控芯片,由电感传感器进行数据采集,实现小车自动循迹功能.系统由光耦隔离电动机驱动模块、减速电动机模块、蜂鸣器声音提示模块、液晶显示模块、编码器测速模块、蓝牙模块、电池模块组成;采用四轮驱动方式,由单片机输出可变脉冲信号驱动减速直流电动机,控制小车转向和速度;单片机通过不断扫描传感器4个通道输出的数据,控制小车完成循迹动作.当检测到障碍物时,单片机控制蜂鸣器模块发出声音提示;由单片机定时器模块实现精确计时,并由编码器测速装置测出小车运行的实时速度,将小车的实时运行时间和行驶距离显示在液晶屏幕上,系统设计精度高、功耗低.【期刊名称】《实验室研究与探索》【年(卷),期】2017(036)010【总页数】5页(P75-79)【关键词】智能小车;电感检测;可变脉冲信号【作者】蔡力坚;郭业才【作者单位】南京信息工程大学电子与信息工程学院,南京210000;南京信息工程大学电子与信息工程学院,南京210000;江苏省大气环境与装备技术协同创新中心,南京210044【正文语种】中文【中图分类】TP273+.1近年来,智能车辆己成为车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。
基于LDC1314的金属丝循迹小车的设计与实现
第10卷第3期2017年6月户*取A辞术#根Journal of G uangxi Vocational and Technical CollegeV o l.lO N o.3J u n e, 2017基于LDC1314的金属丝循迹小车的设计与实现莫家业(南宁职业技术学院机电工程学院,广西南宁,530008)[摘要]以往研究的智能小车循迹大多采用红外对管的方式沿黑线循迹,而针对直径在0.8m m左 右的金属丝循迹是一个新的研究方向。
该文介绍了 一种以STM32为主控制器、以LDC1314电感数 字转换器为传感器的金属丝循迹检测设计方案,重点介绍了 LDC1314的使用方法和注意事项。
实验 结果表明,采用本设计的智能小车可快速稳定地循迹金属丝,并准确地区分识别镀镍硬币。
[关键词]LDC1314;循迹;智能小车;STM32中图分类号:TP216+.1 文献标识码:A文章编号:1674-3083 (2017) 03-0017-04引言机器人循迹小车一直是国内近年来智能小车研宄的热门课题,目前各大高校都在开展这方面的研宄[1]。
以往的循迹模式大都是采用红外方式,红外线针对不同颜色具有不同的反射强度,照射到白色物体时会发生漫反射,而照射到黑色物体时红外光被吸收。
所以被循迹的对象一般都是能吸光的黑线,传感器方面主要用到红外发光管和接收管,或者一体化红外发射接收管。
2016年 多省电子设计联赛提出新的研宄方向,要求 循迹对象是直径为0. 8m m左右的金属丝,且在金属丝旁放置1角硬币(镀镍钢芯,直 径19m m),并能识别区分金属丝与硬币,给出声光报警提示。
本文研宄了一种基于L D C1314的金属丝循迹的设计方案,具有较强的稳定性和较高的灵敏识别度。
1系统设计及实现1.1处理器选型结合实际需要,这里我们以STM32F103VC 系列作为本设计的主控器件。
STM32是基于ARM Cortex_M3内核的32位高级单片机,具 有性能高、成本优、功耗低的特性,其运行时钟达 72M H z,配备有 AD/D A、USA RT、I2C、SPI、CA N、RT C、P W M、定时器、USB 控制器等丰富的外设资源,GPI0率达80%, 512KB 的F l a s h和64K B的S R A M完全可以秒杀51系 列甚至A V R系列的单片机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于LDC1314电感数字传感器的智能循迹小车控制与设计
作者:王宇欣
来源:《科学与财富》2018年第27期
摘要:自动循迹智能小车利用传感器LDC1314扫描式检测,并将检测信号送至12单片机进行处理,从而准确控制直流电机的速度及声光系统,实现按铁丝轨道循迹并检测硬币。
同时采用编码器实现对电机转速的检测,将信号送至单片机进行运算,得到行驶距离,并和时间一起在LCD显示屏上实时显示。
经测试,系统具有良好的自适应性,循迹稳定,硬币识别准确,实时显示距离及时间效果好,实现了预设提出的各项要求。
关键词:STC12LE5A60S2;LDC1314;直流电机;舵机
1 引言
国外很多高校和科研机构研究智能车较早,已有许多技术成熟的产品,我国进行智能车的研究起步较晚,但经济的快速发展必将为智能车的研究提供一个更加广阔的前景。
通过应用自动控制原理、运动控制系统和传感器技术等相关知识,设计了一个对金属轨道自动循迹和识别硬币的小车控制系统。
该设计以C12单片机作为控制核心,使用金属传感器 LDC1314和测速光电编码器来采集相关的数据信息,对智能小车进行了硬软件设计,实现了小车沿着金属轨道快速直行、转弯、测距和记时及识别硬币的功能。
2 系统的方案论证
本设计制作了一个自动循迹智能小车,该小车在规定的直径为0.6~0.9mm的细铁丝跑道上自动循迹前进,同时显示小车行驶的距离和时间,并对跑道上任意放置的硬币进行检测并发出提示音。
跑道示意图如图1所示,图中所有圆弧的半径均为为20cm±2cm。
根据预设的目标要求,对系统方案进行了详细的比较论证,具体如下:
2.1电机选择
方案一:选择步进电机。
步进电机与其他设备进行接口方便,它的精度较好,在执行过程中没有累计误差,且步进电机的步数是通过脉冲数量来控制的,因此它定位较精准,但反应速度却不是特别快。
方案二:选择普通直流电机。
其定位虽不及步进电机精准,但速度很容易控制,且反应快,但本次设计要求对小车行驶的距离进行显示,如果选用普通直流电机,需加测速模块,增加了硬件电路设计的复杂性。
方案三:选择直流电机外加编码器测速。
简化了硬件设计,且同时具有普通直流电机的优势。
因此,选择方案三,电机具体型号为540,驱动采用RZ7886芯片驱动模块实现,测速用E6A2-CW3C编码器实现。
2.2传感器选择
(1)本次设计需要小车对铁丝轨道进行探测并循迹,同时还需要检测硬币,可以采用TI 公司LDC1314或LDC1000任意一款传感器。
据查资料了解到LDC1314传感器功耗低、结构简单、成本低,且能满足系统检测要求,最终设计中选定了LDC1314传感器。
(2)为实时显示小车运行距离,采用了霍尔编码器检测电机转速(直流电机中自带),通过将编码器检测到的数据送至单片机进行具体计算得到距离值并加以显示。
2.3铁丝及硬币检测方案
方案一:将传感器LDC1314直接固定在车体底部并尽量贴近轨道,对铁丝和硬币进行检测,比较检测数据值,控制电机按既定轨道运行,此检测方法检测范围窄,会出现误判,导致小车运行时偏离轨迹几率大。
方案二:在车体底部安装传感器LDC1314扫描式检测,输入信号给单片机,舵机的运动通过单片机输出PWM来控制,当PWM值变化时,可以改变舵机的位置。
检测范围宽,比较的数值为一个数据段,控制灵活,小车运行稳定。
经不断试验,选用了方案二,舵机选用型号MG-996R
2.4 测距方案
方案一:检测小车运行时霍尔编码器输出的脉冲个数,采用适合于低速的T法测速,计算得到电机的实时转速,乘以时间,计算得出距离。
方案二:检测小车运行时霍尔编码器输出的脉冲个数,用测得的脉冲数除以车轮运行一周的脉冲数,再乘以车轮的周长计算得出距离。
经测试,方案一检测出的实时距离误差较小,因此选择方案一。
2.5 系统总体设计方案
基于以上方案论证,循迹小车总体结构框架图如图2所示:
3 传感器LDC1314工作原理
导体在与交变电磁(EM)场接触时将引起磁场变化,可以采用传感器中的电感传感器进行检测。
一个电感器与一个电容器可以构造一个L-C振荡器,可以用来产生电磁场。
在一个LC振荡器中,当电磁场收到干扰时,可以观察到电感发生微小的偏移,与共振频率存在一定关系。
利用这个原理,在LDC1314是一个电感-数字转换器(LDC),通过测量LC谐振器的振荡频率。
该器件输出数字值与振荡频率成比例关系。
此频率测量值可以被转换为一个等效电感。
LDC1314由前端谐振电路驱动构成,其通过一个多路复用器的有效通道序列。
连接他们到芯片对传感器频率进行测量与数字化处理。
芯片使用基准频率来测量传感器的频率,基准频率从一个内部基准时钟(振荡器),或外部提供的时钟频率。
4 软件设计
小车控制程序主要为循迹,检测硬币,测距测时并实时显示,这里主要介绍循迹及硬币检测主程序流程图,如图所示。
5 系统测试
5.1测试工具
铁丝轨道;精度1mm的卷尺;精度1s的秒表;一角硬币。
5.2测试方法与测试结果分析
(1)小车跑完一圈的时间及铁丝轨迹偏离小车垂直投影的情况。
将小车放在跑道任意位置,共测试五次,记录跑完一圈的时间及铁丝偏离小车垂直投影的距离。
(2)小车实时显示测距,测试情况。
小车运行过程中,LCD显示屏上清晰可见实时显示的距离和时间,并与小车实测距离时间进行对比。
(3)一角硬币检测情况。
将多个硬币放置在铁丝轨迹的两侧,记录小车通过时的情况。
6 结束语
通过测试,此次设计的自动循迹小车基本实现了预期的各项需求,循迹稳定。
硬币
识别稳定,且硬币无论放到任何位置均可检测出。
设计中所用的1314芯片功耗低,灵敏度高,很好的实现了各项功能。
通讯作者:岑强。