1pg
常用单位换算表
常用单位换算表,常用单位换算公式常用单位换算表,常用单位换算公式一度电=1000W.H(一千瓦.时)即一千瓦的功率用一小时为一度电.一匹=0.735KW.一般预10%的损耗.即一匹的空调一般取800W的功率来算.如果你的空调是一匹的,那么八度电大概能用十二小时.常用单位换算表长度1千米(km)=0.621英里(mile) 1米(m)=3.281英尺(ft)=1.094码(yd) 1厘米(cm)=0.394英寸(in)1英里(mile)=1.609千米(km) 1英尺(ft)=0.3048米(m) 1英寸(in)=2.54厘米(cm)1海里(n mile)=1.852千米(km) 1码(yd)=0.9144米(m) 1英尺(ft)=12英寸(in)1码(yd)=3英尺(ft) 1英里(mile)=5280英尺(ft) 1海里(n mile)=1.1516英里(mile)质量1吨(t)=1000千克(kg)=2205磅(lb)=1.102短吨(sh.ton)=0.934长吨(long.ton) 1千克(kg)=2.205磅(lb) 1短吨(sh.ton)=0.907吨(t)=2000磅(1b)1长吨(long.ton)=1.016吨(t) 1磅(lb)=0.454千克(kg) 1盎司(oz)=28.350克(g)密度1千克/米3(kg/m3)=0.001克/厘米3(g/cm3)=0.0624磅/英尺3(lb/ft3) 1磅/英尺3(lb/ft3)=16.02千克/米3(kg/m3) 1磅/英寸3(lb/in3)=27679.9千克/米3(kg/m3)1磅/美加仑(lb/gal)=119.826千克/米3(kg/m3) 1磅/英加仑(lb/gal)=99.776千克/米3(kg/m3) 1磅/(石油)桶(lb/bbl)=2.853千克/米3(kg/m3)1波美密度=140/15.5℃时的比重-130 API=141.5/15.5℃时的比重-131.5压力1兆帕(MPa)=145磅/英寸2(psi)=10.2千克/厘米2(kg/cm2)=10巴(bar)=9.8大气压(at m) 1磅/英寸2(psi)=0.006895兆帕(MPa) =0.0703千克/厘米2(kg/cm2)=0.0689巴(bar)=0.068大气压(at m) 1巴(bar)=0.1兆帕(MPa)=14.503磅/英寸2(psi)=1.0197千克/厘米2(kg/cm2)=0.987大气压(at m)1大气压(at m)=0.101325兆帕(MPa)=14.696磅/英寸2(psi)=1.0333千克/厘米2(kg/cm2)=1.0133巴(bar)面积1平方公里(km2)=100公顷(ha)=247.1英亩(acre)=0.386平方英里(mile2) 1平方米(m2)=10.764平方英尺(ft2) 1公亩(acre)=100平方米(m2)1公顷(ha)=10000平方米(m2)=2.471英亩(acre) 1平方英里(mile2)=2.590平方公里(km2) 1英亩(acre)=0.4047公顷(ha)=40.47*10-3平方公里(km2)=4047平方米(m2)1平方英尺(ft2)=0.093平方米(m2) 1平方英寸(in2)=6.452平方厘米(cm2) 1平方码(yd2)=0.8361平方米(m2)体积1立方米(m3)=1000升(liter)=35.315立方英尺(ft3)=6.290桶(bbl) 1立方英尺(ft3)=0.0283立方米(m3)=28.317升(l) 1千立方英尺(mcf)=28.317立方米(m3)1百万立方英尺(MMcf)=2.8317万立方米(m3) 10亿立方英尺(bcf)=2831.7万立方米(m3) 1万亿立方英尺(tcf)=283.17亿立方米(m3)1立方英寸(in3)=16.3871立方厘米(cm3) 1英亩·英尺=1234立方米(m3) 1桶(bbl)=0.159立方米(m3)=42美加仑(gal)1美加仑(gal)=3.785升(l) 1美夸脱(qt)=0.946升(l) 1美品脱(pt)=0.473升(l)1美吉耳(gi)=0.118升(l) 1英加仑(gal)=4.546升(l)运动粘度1英尺2/秒(ft2/s)=9.29030*10-2米2/秒(m2/s) 1斯(St)=10-4米2/秒(m2/s) 1厘斯(eSt)=10-6米2/秒(m2/s)=1毫米2/秒(mm2/s)动力粘度1泊(P)=0.1帕·秒(Pa·s) 1厘泊(cP)=10-3帕·秒(Pa·s) 1千克力秒/米2=9.80505帕·秒(Pa·s)1磅力秒/英尺2(1bf·s/ft2)=47.8803帕·秒(Pa·s)力1牛顿(N)=0.225磅力(1bf)=0.102千克力(kgf) 1千克力(kgf)=9.81牛顿(N) 1磅力(1bf)=4.45牛顿(N)1达因(dyn)=10-5牛顿(N)温度K(开尔文度)=5/9(℉+459.67) K=℃+273.15n℉=[(n-32)*5/9]℃n℃(摄氏度)=(5/9·n+32)℉ 1℉(华氏度)=5/9℃(温度差)传热系数1千卡(米2·时·℃)[kcal/(m2·h·℃)]=1.6279瓦/(米2·开尔文)[W(m2·K)] 1英热单位/(英尺2·时·℉)[Btu/(ft2·h·℉)]=5.67826瓦/(米2·开尔文)[W(m2·K)] 1米2·时·℃/千卡(m2·h·℃/kcal) =0.86000米2·开尔文/瓦(m2·K/W)1千卡(米2·时)(kcal/m2·h)=1.16279瓦/米2(W/m2)热导率1千卡(米2·时·℃)[kcal/(m2·h·℃)]=1.16279瓦/(米·开尔文)[W(m·K)] 1英热单位/(英尺2·时·℉)[Btu/(ft2·h·℉)]=1.7303瓦/(米·开尔文)[W(m·K)]比容热1千卡/(千克·℃)[kcal/(kg·℃)]=1英热单位/(磅·℉)[Btu/(lb·℉)]=4186.8焦耳/(千克·开尔文)[J/(kg·K)]热功1焦耳=0.10204千克·米=2.778*10-7千瓦·小时=3.777*10-7公制马力小时=3.723*10-7英制马力小时=2.389*10-4千卡=9.48*10-4英热单位 1卡(cal)=4.1868焦耳(J) 1英热单位(Btu)=1055.06焦耳(J)1千克力米(kgf·m)=9.80665焦耳(J) 1英尺磅力(ft·1bt)=1.35582焦耳(J) 1米制马力小时(hp·h)=2.64779*106焦耳(J)1英制马力小时(UKHp·h)=2.68452*106焦耳(J) 1千瓦小时(kw·h)=3.6*106焦耳(J) 1大卡=4186.75焦耳(J)功率1千克力·米/秒(kgf·m/s)=9.80665瓦(W) 1米制马力(hp)=735.499瓦(W) 1卡/秒(cal/s)=4.1868瓦(W)1英热单位/时(Btu/h)=0.293071瓦(W)速度1英尺/秒(ft/s)=0.3048米/秒(m/s) 1英里/时(mile/h)=0.44704米/秒(m/s)渗透率1达西=1000毫达西 1平方厘米(cm2)=9.81*107达西核酸纯化常用单位及转换一、Metric PrefixesG = giga = 109M = mega = 108k = kilo = 103m = milli = 10-3μ= micro = 10-6n = nano = 10-9p = pico = 10-12f = femto = 10-15a = atto = 10-18二、重量换算1μg=10-6 g1ng =10-9 g1pg =10-12g1fg =10-15 g三、A260单位的换算1A260单位的双链DNA=50μg/ml1A260单位的单链RNA=40μg/ml1A260单位的单链DNA=40μg/ml1A260单位的寡糖苷酸=33μg/ml四、重量与摩尔的换算1μg的 1kb DNA = 1.52pmol1μg的pBR322 DNA =0.36pmol1pmol of 1,000bp DNA =0.66μg1pmol of pUC18/19 DNA(2.686bp) =1.77μg1pmol of pBR322 DNA(4,361 bp) =2.88μg1pmol of M13mp18/19 DNA(7,249bp) =4.78μg1pmol of DNA(48,502 bp)=32.01μg五、核酸碱基对与分子量的换算1kb的双链DNA(钠盐)=6.6×105D1kb的单链DNA(钠盐)=3.3×105D1kb单链RNA(钠盐)=3.4×105D脱氧核苷酸的平均分子量=324.5D六、常见核酸的分子量核酸核苷酸数分子量(D)入DNA(环状双链)48502 3.1×107pBR322DNA 4363(双链) 2.8×10628SrRNA 4800 1.6×106 23SrRNA 3700 1.2×10618SrRNA 1900 6.1×10616SrRNA 1700 5.5×1055SrRNA 120 3.6×104 tRNA(大肠) 75 2.5×104七、核酸碱基分子量AMP 347.2CMP 323.2GMP 363.3UMP 324.2damp 331.2dCMP 307.2dGMP 347.2dTMP 322.2八、蛋白质重量的换算100pmoles of 100,000 dalton protein=10μg100pmoles of 500,000 dalton protein=5μg100pmoles of 10,000 dalton protein=1μg九、蛋白质与核酸的换算lkb DNA=333个氨基酸的编码能力333个氨基酸3.7×104D(道尔顿)10,000D蛋白质=270bp DNA30,000D蛋白质=810bp DNA50,000D蛋白质=1.35kb DNA100,000D蛋白质=2.7kb DNA1 英里码17602 码英尺 33 英尺英寸124 英寸英分85 英寸密耳10006 米英尺 3.280847 米英寸39.37018 密耳毫米0.02549 码米0.914410 英里英尺528011 英里米1609.3412 海里千米 1.85213 海里英里 1.1507814 毫米英寸0.039415 公亩平方米10016 公倾公亩10017 平方码平方英尺 918 平方英尺平方英寸 14419 英亩平方码484020 英亩平方英尺4356021 平方米平方厘米 1000022 平方米平方毫米 100000023 平方米平方英尺 10.763924 平方米平方英寸 155025 公倾英亩 2.4710526 升立方分米 127 升立方厘米100028 毫升立方厘米 129 立方米升100030 立方米立方英寸 6102331 立方米英加仑219.96932 立方米美加仑(液量) 264.17233 毫克千克0.00000134 厘克千克0.0000135 分克千克0.000136 克千克0.00137 十可千克0.0138 百克千克0.139 吨千克100040 英吨磅224041 美吨磅200042 磅盎司1643 磅格令700044 吨英吨0.98420745 吨美吨 1.1023146 吨磅2204.6247 磅千克0.45361 基础知识1.1 用于构成十进制倍数和分数单位的词头(词冠)词头中文名词头英文名符号所表示的因数词头中文名词头英文名符号所表示的因数分 deci d10-1 皮 pico p 10-12厘 centi c10-2 千 kilo K 103毫 milli m10-3 兆 mega M 106微 micro μ10-6 吉 giga G 109纳 nano n10-9 太 tera T 1012为不失一般性,下面的一些公式中将以希腊字母Θ代表无词头和十进制分数单位的词头(m、μ、n、p)。
常用单位换算表
常用单位换算表,常用单位换算公式常用单位换算表,常用单位换算公式一度电=1000W.H(一千瓦.时)即一千瓦的功率用一小时为一度电.一匹=0.735KW.一般预10%的损耗.即一匹的空调一般取800W的功率来算.如果你的空调是一匹的,那么八度电大概能用十二小时.常用单位换算表长度1千米(km)=0.621英里(mile) 1米(m)=3.281英尺(ft)=1.094码(yd) 1厘米(cm)=0.394英寸(in)1英里(mile)=1.609千米(km) 1英尺(ft)=0.3048米(m) 1英寸(in)=2.54厘米(cm)1海里(n mile)=1.852千米(km) 1码(yd)=0.9144米(m) 1英尺(ft)=12英寸(in)1码(yd)=3英尺(ft) 1英里(mile)=5280英尺(ft) 1海里(n mile)=1.1516英里(mile)质量1吨(t)=1000千克(kg)=2205磅(lb)=1.102短吨(sh.ton)=0.934长吨(long.ton) 1千克(kg)=2.205磅(lb) 1短吨(sh.ton)=0.907吨(t)=2000磅(1b)1长吨(long.ton)=1.016吨(t) 1磅(lb)=0.454千克(kg) 1盎司(oz)=28.350克(g)密度1千克/米3(kg/m3)=0.001克/厘米3(g/cm3)=0.0624磅/英尺3(lb/ft3) 1磅/英尺3(lb/ft3)=16.02千克/米3(kg/m3) 1磅/英寸3(lb/in3)=27679.9千克/米3(kg/m3)1磅/美加仑(lb/gal)=119.826千克/米3(kg/m3) 1磅/英加仑(lb/gal)=99.776千克/米3(kg/m3) 1磅/(石油)桶(lb/bbl)=2.853千克/米3(kg/m3)1波美密度=140/15.5℃时的比重-130 API=141.5/15.5℃时的比重-131.5压力1兆帕(MPa)=145磅/英寸2(psi)=10.2千克/厘米2(kg/cm2)=10巴(bar)=9.8大气压(at m) 1磅/英寸2(psi)=0.006895兆帕(MPa) =0.0703千克/厘米2(kg/cm2)=0.0689巴(bar)=0.068大气压(at m) 1巴(bar)=0.1兆帕(MPa)=14.503磅/英寸2(psi)=1.0197千克/厘米2(kg/cm2)=0.987大气压(at m)1大气压(at m)=0.101325兆帕(MPa)=14.696磅/英寸2(psi)=1.0333千克/厘米2(kg/cm2)=1.0133巴(bar)面积1平方公里(km2)=100公顷(ha)=247.1英亩(acre)=0.386平方英里(mile2) 1平方米(m2)=10.764平方英尺(ft2) 1公亩(acre)=100平方米(m2)1公顷(ha)=10000平方米(m2)=2.471英亩(acre) 1平方英里(mile2)=2.590平方公里(km2) 1英亩(acre)=0.4047公顷(ha)=40.47*10-3平方公里(km2)=4047平方米(m2)1平方英尺(ft2)=0.093平方米(m2) 1平方英寸(in2)=6.452平方厘米(cm2) 1平方码(yd2)=0.8361平方米(m2)体积1立方米(m3)=1000升(liter)=35.315立方英尺(ft3)=6.290桶(bbl) 1立方英尺(ft3)=0.0283立方米(m3)=28.317升(l) 1千立方英尺(mcf)=28.317立方米(m3)1百万立方英尺(MMcf)=2.8317万立方米(m3) 10亿立方英尺(bcf)=2831.7万立方米(m3) 1万亿立方英尺(tcf)=283.17亿立方米(m3)1立方英寸(in3)=16.3871立方厘米(cm3) 1英亩·英尺=1234立方米(m3) 1桶(bbl)=0.159立方米(m3)=42美加仑(gal)1美加仑(gal)=3.785升(l) 1美夸脱(qt)=0.946升(l) 1美品脱(pt)=0.473升(l)1美吉耳(gi)=0.118升(l) 1英加仑(gal)=4.546升(l)运动粘度1英尺2/秒(ft2/s)=9.29030*10-2米2/秒(m2/s) 1斯(St)=10-4米2/秒(m2/s) 1厘斯(eSt)=10-6米2/秒(m2/s)=1毫米2/秒(mm2/s)动力粘度1泊(P)=0.1帕·秒(Pa·s) 1厘泊(cP)=10-3帕·秒(Pa·s) 1千克力秒/米2=9.80505帕·秒(Pa·s)1磅力秒/英尺2(1bf·s/ft2)=47.8803帕·秒(Pa·s)力1牛顿(N)=0.225磅力(1bf)=0.102千克力(kgf) 1千克力(kgf)=9.81牛顿(N) 1磅力(1bf)=4.45牛顿(N)1达因(dyn)=10-5牛顿(N)温度K(开尔文度)=5/9(℉+459.67) K=℃+273.15n℉=[(n-32)*5/9]℃n℃(摄氏度)=(5/9·n+32)℉ 1℉(华氏度)=5/9℃(温度差)传热系数1千卡(米2·时·℃)[kcal/(m2·h·℃)]=1.6279瓦/(米2·开尔文)[W(m2·K)] 1英热单位/(英尺2·时·℉)[Btu/(ft2·h·℉)]=5.67826瓦/(米2·开尔文)[W(m2·K)] 1米2·时·℃/千卡(m2·h·℃/kcal) =0.86000米2·开尔文/瓦(m2·K/W)1千卡(米2·时)(kcal/m2·h)=1.16279瓦/米2(W/m2)热导率1千卡(米2·时·℃)[kcal/(m2·h·℃)]=1.16279瓦/(米·开尔文)[W(m·K)] 1英热单位/(英尺2·时·℉)[Btu/(ft2·h·℉)]=1.7303瓦/(米·开尔文)[W(m·K)]比容热1千卡/(千克·℃)[kcal/(kg·℃)]=1英热单位/(磅·℉)[Btu/(lb·℉)]=4186.8焦耳/(千克·开尔文)[J/(kg·K)]热功1焦耳=0.10204千克·米=2.778*10-7千瓦·小时=3.777*10-7公制马力小时=3.723*10-7英制马力小时=2.389*10-4千卡=9.48*10-4英热单位 1卡(cal)=4.1868焦耳(J) 1英热单位(Btu)=1055.06焦耳(J)1千克力米(kgf·m)=9.80665焦耳(J) 1英尺磅力(ft·1bt)=1.35582焦耳(J) 1米制马力小时(hp·h)=2.64779*106焦耳(J)1英制马力小时(UKHp·h)=2.68452*106焦耳(J) 1千瓦小时(kw·h)=3.6*106焦耳(J) 1大卡=4186.75焦耳(J)功率1千克力·米/秒(kgf·m/s)=9.80665瓦(W) 1米制马力(hp)=735.499瓦(W) 1卡/秒(cal/s)=4.1868瓦(W)1英热单位/时(Btu/h)=0.293071瓦(W)速度1英尺/秒(ft/s)=0.3048米/秒(m/s) 1英里/时(mile/h)=0.44704米/秒(m/s)渗透率1达西=1000毫达西 1平方厘米(cm2)=9.81*107达西核酸纯化常用单位及转换一、Metric PrefixesG = giga = 109M = mega = 108k = kilo = 103m = milli = 10-3μ= micro = 10-6n = nano = 10-9p = pico = 10-12f = femto = 10-15a = atto = 10-18二、重量换算1μg=10-6 g1ng =10-9 g1pg =10-12g1fg =10-15 g三、A260单位的换算1A260单位的双链DNA=50μg/ml1A260单位的单链RNA=40μg/ml1A260单位的单链DNA=40μg/ml1A260单位的寡糖苷酸=33μg/ml四、重量与摩尔的换算1μg的 1kb DNA = 1.52pmol1μg的pBR322 DNA =0.36pmol1pmol of 1,000bp DNA =0.66μg1pmol of pUC18/19 DNA(2.686bp) =1.77μg1pmol of pBR322 DNA(4,361 bp) =2.88μg1pmol of M13mp18/19 DNA(7,249bp) =4.78μg1pmol of DNA(48,502 bp)=32.01μg五、核酸碱基对与分子量的换算1kb的双链DNA(钠盐)=6.6×105D1kb的单链DNA(钠盐)=3.3×105D1kb单链RNA(钠盐)=3.4×105D脱氧核苷酸的平均分子量=324.5D六、常见核酸的分子量核酸核苷酸数分子量(D)入DNA(环状双链)48502 3.1×107pBR322DNA 4363(双链) 2.8×10628SrRNA 4800 1.6×106 23SrRNA 3700 1.2×10618SrRNA 1900 6.1×10616SrRNA 1700 5.5×1055SrRNA 120 3.6×104 tRNA(大肠) 75 2.5×104七、核酸碱基分子量AMP 347.2CMP 323.2GMP 363.3UMP 324.2damp 331.2dCMP 307.2dGMP 347.2dTMP 322.2八、蛋白质重量的换算100pmoles of 100,000 dalton protein=10μg100pmoles of 500,000 dalton protein=5μg100pmoles of 10,000 dalton protein=1μg九、蛋白质与核酸的换算lkb DNA=333个氨基酸的编码能力333个氨基酸3.7×104D(道尔顿)10,000D蛋白质=270bp DNA30,000D蛋白质=810bp DNA50,000D蛋白质=1.35kb DNA100,000D蛋白质=2.7kb DNA1 英里码17602 码英尺 33 英尺英寸124 英寸英分85 英寸密耳10006 米英尺 3.280847 米英寸39.37018 密耳毫米0.02549 码米0.914410 英里英尺528011 英里米1609.3412 海里千米 1.85213 海里英里 1.1507814 毫米英寸0.039415 公亩平方米10016 公倾公亩10017 平方码平方英尺 918 平方英尺平方英寸 14419 英亩平方码484020 英亩平方英尺4356021 平方米平方厘米 1000022 平方米平方毫米 100000023 平方米平方英尺 10.763924 平方米平方英寸 155025 公倾英亩 2.4710526 升立方分米 127 升立方厘米100028 毫升立方厘米 129 立方米升100030 立方米立方英寸 6102331 立方米英加仑219.96932 立方米美加仑(液量) 264.17233 毫克千克0.00000134 厘克千克0.0000135 分克千克0.000136 克千克0.00137 十可千克0.0138 百克千克0.139 吨千克100040 英吨磅224041 美吨磅200042 磅盎司1643 磅格令700044 吨英吨0.98420745 吨美吨 1.1023146 吨磅2204.6247 磅千克0.45361 基础知识1.1 用于构成十进制倍数和分数单位的词头(词冠)词头中文名词头英文名符号所表示的因数词头中文名词头英文名符号所表示的因数分 deci d10-1 皮 pico p 10-12厘 centi c10-2 千 kilo K 103毫 milli m10-3 兆 mega M 106微 micro μ10-6 吉 giga G 109纳 nano n10-9 太 tera T 1012为不失一般性,下面的一些公式中将以希腊字母Θ代表无词头和十进制分数单位的词头(m、μ、n、p)。
FX3U-1PG用户手册 (2015.10)
认安全的情况下方可进行操作。
操作错误有可能导致机械破损及事故发生。
请勿擅自拆解、改动产品。 否则有可能引起故障、误动作、火灾。 *关于维修事宜,请向三菱电机自动化(中国)有限公司维修部咨询。
对扩展电缆等连接电缆进行拆装时请在断开电源之后再进行操作。 否则有可能引起故障、误动作。
在对以下的设备进行拆装时请务必将电源切断。 否则有可能引起故障、误动作。 - 外围设备、显示模块、功能扩展板、特殊适配器 - 输入输出扩展单元/模块、FX系列终端模块、特殊功能单元/模块 - 电池、存储器盒
(3)
安全方面注意事项
(使用之前请务必阅读)
MEMO
(4)
FX3U-1PG 用户手册
FX3U-1PG
用户手册
手册编号 版本号 制作年月
JY997D65601 A 2015年10月
通知
此次承蒙购入FX3U-1PG型脉冲输出模块,诚表谢意。本手册针对FX3U-1PG型脉冲输出模块的使用进行介绍。在使 用之前,请阅读本书以及相关产品的手册,希望在充分理解其规格的前提下正确使用产品。 总之,希望本手册能够送达至最终用户处。
(1)
安全方面注意事项
(使用之前请务必阅读)
参考页
请在可编程控制器主机手册所记载的一般规格的环境下使用。
请勿在有灰尘、油烟、导电性粉尘、腐蚀性气体(海风、Cl2、H2S、SO2、NO2 等)、可燃性气体的
场所,暴露在高温、结露、风雨中的场所,有振动、冲击的场所中使用。
否则有可能导致触电、火灾、误动作、产品损坏以及变质。
孔内。
否则有可能导致火灾、故障及误动作。
请在作业结束后取下安装在可编程控制器通风孔上的防尘膜。
否则有可能导致火灾、故障及误动作。
2023年燃气管理人员考试题第65套

1、(判断题)民用燃气用具的燃烧器主要由引射器和头部组成。
参考答案:正确2、(判断题)液态NG的体积约为气态时的1/600,有利于运输和贮存。
参考答案:正确3、(判断题)气体在管道中流动时,不会产生静电火花。
参考答案:错误4、(判断题)物体与剖切面相接触部分的投影图称为断面图或截面图。
参考答案:正确5、(判断题)液化石油气钢瓶运输时可以重叠卧放,但不能超过2层。
参考答案:错误6、(判断题)我国城市燃气标准中规定,每立方米天然气硫化物含量小于20mg o参考答案:错误7、(判断题)容积、压力和温度三个可测的状态参数称为基本状态参数。
参考答案:错误8、(判断题)1PG的热值较高,所以燃烧时需要大量的空气与之混合O参考答案:正确9、(判断题)对燃气发展规划范围内的燃气设施建设工程,城乡规划主管部门在依法核发选址意见书时,应当就燃气设施建设是否符合燃气发展规划征求燃气管理部门的意见。
参考答案:正确10、(判断题)根据不同的工作原理,燃气压力表可分为液柱、弹性、电气、活塞式四种类型。
参考答案:正确11、(判断题)炎热、高温、地面导电性高等场所属于危险场所。
参考答案:正确12、(判断题)天然气的组成是固定不变的,产地不同,其组成也相同。
参考答案:错误13、(判断题)消防工作方针是“安全第一,预防为主”。
参考答案:错误14、(判断题)单位工程是单项工程中具有独立施工条件的工程,单项工程是单位工程的组成部分。
参考答案:错误15、(判断题)NG管道调压器的被调参数是进口压力。
参考答案:错误16、(判断题)燃气经营者不得要求用户购买其指定的产品。
参考答案:正确17、(判断题)生产经营单位可以短期将生产经营项目、场所、设备发包或者出租给不具备安全生产条件或者相应资质的单位或者个人。
参考答案:错误18、(判断题)高层建筑燃气立管应有承重支撑和消除燃气附加压力的措施。
参考答案:正确19、(判断题)绝热指数K=CV/CP。
浅谈FX2n—1PG的定位控制
浅谈FX2n—1PG的定位控制作者:周日祥来源:《职业·中旬》2013年第07期摘要:在定位控制系统中,常常需要采用大量的传感器作定位控制,使得在工程中安装的位置控制器较多,而且在较远程的位置安装更不方便,容易受外界的影响出现信号误差,造成位置偏差。
本文主要介绍三菱PLC定位模块1PG在定位控制中的应用,并通过实例介绍了与PLC的硬件联接与软件编程方法。
关键词:定位模块控制运行方式位置控制在自动化控制工业领域中,一直是人们关注的问题。
位置控制从初始的机械开关再到现在的传感器,定位控制从以前通过编码器反馈信号到现在的1PG、20GM等定位模块,人们一直在想办法让位置控制变得更可靠、更便捷。
对于定位控制,PLC无疑是被首先选择的,它可靠性高,程序编辑、修改和调试便捷。
另外,在PLC扩展一个定位模块无需在硬件处理上花太多的精力,而且它可以采用积木式结构不断扩展,从而有效地控制1台到8台的定位模块可实现多轴联动的控制方式。
一、FX2n-1PG简介FX2n-1PG脉冲输出模块相当于一种脉冲发生器单元。
1PG脉冲输出模块是一种根据PLC 功能指令FROM/TO指令进行与FX系列PLC进行数据交换的特殊功能模块。
用一台FX-1PG 脉冲模块可以独立进行轴定位控制,而一台PLC则最多可连接8台1PG,也就是说可以实现8个独立的操作。
FX-1PG脉冲输出模块的主要技术指标如下:①可输出最高频率为100kbit/s的脉冲;②定位目标的追踪、运转速度及各种参数通过PLC用FROM/TO指令设定;③除脉冲序列输出外,还备有各种高速响应的输出端子,而其他的I/O通常需要通过PLC进行控制;④编制定位用程序不需专用程序设计工具,用PLC的程序就可以控制。
定位数据的设定和瞬时位置的显示均可通过PLC实现。
二、系统的组成及控制方式FX2n-1PG系统的组成要观察现场实际需要而定。
例如,只用1PG控制独轴,即设备在单轨道上左右运行时,系统就较为简单,如图1所示。
定位模块FX2N-1PG和伺服驱动实现纸张定位控制
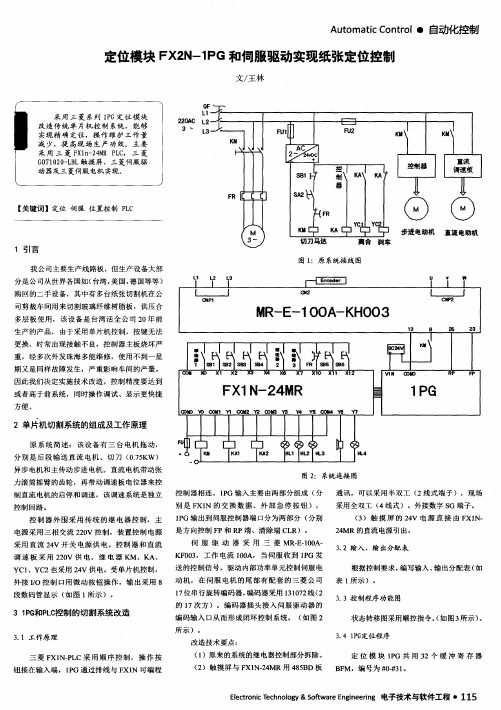
别是 F X1 N 的 交换 数 据、 外部 急 停按 钮 ), 1 P G输出到伺服控制器端 口分为 两部分 ( 分别 是方向控制 F P和 RP端、清 除端 CL R)。 伺 服 驱 动 器 采 用 三 菱 MR- E 一 1 0 0 A— KF O 0 3 ,工 作 电流 1 0 0 A, 当伺服 收到 1 P G 发 送的控制信号 ,驱动 内部功率单元控制 伺服 电 动机 ,在 伺 服 电机 的尾部 有配 套 的三菱 公 司 1 7 位 串行旋转编码器, 编码器采用 1 3 1 0 7 2线( 2 的1 7次方 )。编码器 插头接入 伺服 驱动器 的 编码 输入 口从而 形成 闭环控 制系统 。 ( 如图2
在输入端 ,I P G通过排线与 F XI N 可编程
定位 模 块 1 P G共用 3 2个 缓 冲 寄 存 器
( 2 )触 摸屏 与 F X1 N一 2 4 MR用 4 8 5 B D板 B F M,编号为 # 0 - # 3 1 。
E l e c t r o n i c T e c h n o l o g y &S o f t w a r e E n g i n e e r i n g 电子技 术 与软件 工程 ・ 1 1 5
操 作 维 护工作 量 f 减 少,提 高现 场 生 产 功效 。主要 I 采用 三 菱 F X l n 一 2 4 M R P L C , 三 菱 f
,
G O T 1 0 2 0 - L B L 触摸屏、三菱伺服驱 l 动器及三菱伺服 电机 实现 。 【
J
键词 】定位 伺服 位置控制 P L C
所示 )。
采用全双工 ( 4线 式)。外接数字 S G端 子。 ( 3 )触 摸 屏 的 2 4 V 电源 直 接 由 F X1 N. 2 4 MR的直流 电源 引出。 3 . 2输入 、输 出分配表 根据 控制要求, 编写输入、 输 出分配表 ( 如 表 1所示 )。 3 . 3控制程序功 能图
定位模块1PG实际运行设定程序
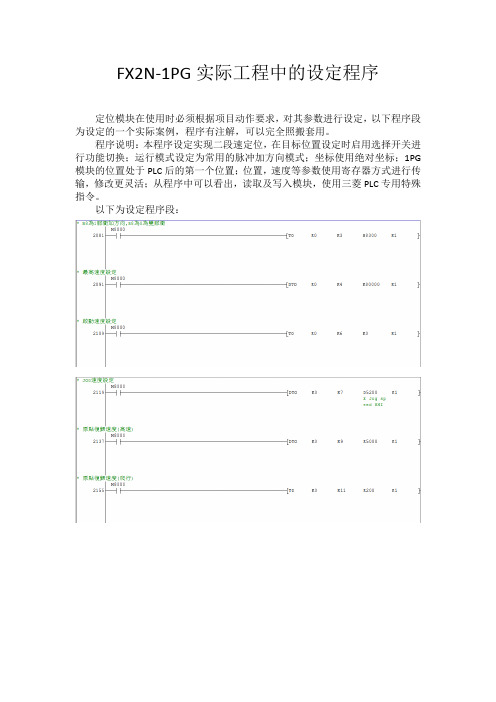
FX2N-1PG实际工程中的设定程序
定位模块在使用时必须根据项目动作要求,对其参数进行设定,以下程序段为设定的一个实际案例,程序有注解,可以完全照搬套用。
程序说明:本程序设定实现二段速定位,在目标位置设定时启用选择开关进行功能切换;运行模式设定为常用的脉冲加方向模式;坐标使用绝对坐标;1PG 模块的位置处于PLC后的第一个位置;位置,速度等参数使用寄存器方式进行传输,修改更灵活;从程序中可以看出,读取及写入模块,使用三菱PLC专用特殊指令。
以下为设定程序段:。
FX2N-1PG模块性能参数
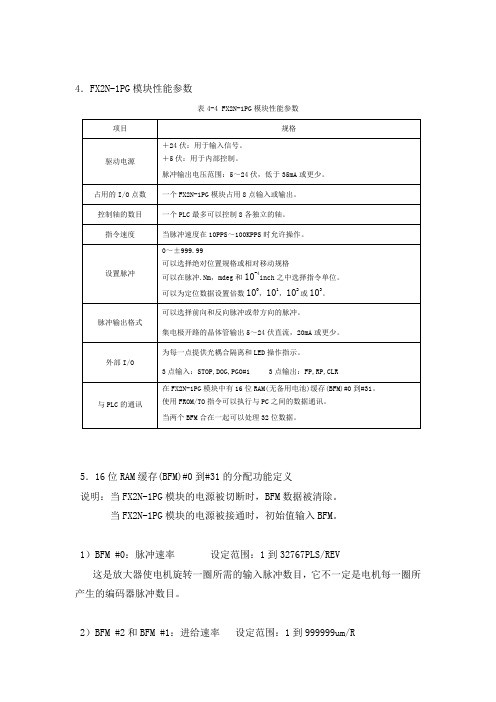
4.FX2N-1PG模块性能参数表4-4 FX2N-1PG模块性能参数5.16位RAM缓存(BFM)#0到#31的分配功能定义说明:当FX2N-1PG模块的电源被切断时,BFM数据被清除。
当FX2N-1PG模块的电源被接通时,初始值输入BFM。
1)BFM #0:脉冲速率设定范围:1到32767PLS/REV这是放大器使电机旋转一圈所需的输入脉冲数目,它不一定是电机每一圈所产生的编码器脉冲数目。
2)BFM #2和BFM #1:进给速率设定范围:1到999999um/R这是电机旋转一圈的机器移动量。
3)BFM #3:参数设定。
① b0到b1的内容设定含义如下② b3到b2的内容无意义。
③ b5到b4的内容设定含义如下举例:当设置的位置(BFM#18和#17)的值是356并且BFM#3(b5,b4)是(1,1)时,实际位置(或移动距离)如下:对于电机系统单位有 356×103=356000(脉冲)对于机器系统和复合系统单位有 356×103=356000(um,mdeg, 10-4inch)=356(mm,deg, 10-1inch)④ b7到b6的内容无意义。
⑤ b8的内容决定脉冲输出的格式。
FX2N-1PG模块的脉冲输出端子FP和RP根据b8的设置(0或1)发生如下改变:当b8=0时,前向脉冲(FP)和反向脉冲(RP)波形如下:⑥ b9的内容决定旋转方向当b9=0时,每有一个前向脉冲(FP),当前位置(CP)值就增加一次。
当b9=1时,每有一个前向脉冲(FP),当前位置(CP)值就减少一次。
该位用于初始设置,在每个实际操作中,不需要改变旋转方向。
⑦ b10的内容决定原点返回方向,b11的内容无意义。
当b10=0时,在返回原点的过程中当前位置(CP)值减少。
当b10=1时,在返回原点的过程中当前位置(CP)值增加。
⑧ b12的内容决定DOG输入的极性,b13的内容决定计数开始定时。
pg换成ng计算公式

pg换成ng计算公式从pg到ng的计算公式。
在物理学和工程学中,我们经常需要进行单位换算,特别是在涉及到能量、功率、电荷等方面的计算时。
在这些计算中,我们经常需要将单位从皮高(pg)转换成纳高(ng)。
为了帮助大家更好地理解这个单位转换过程,本文将介绍如何从pg到ng的计算公式。
首先,我们需要了解pg和ng分别代表什么。
皮高(pg)是一种质量单位,相当于千克的百万亿分之一。
而纳高(ng)也是一种质量单位,相当于千克的十亿分之一。
因此,从pg到ng的转换实际上是将质量的百万亿分之一转换成十亿分之一的过程。
在进行单位转换时,我们可以使用以下的计算公式:1pg = 0.001ng。
这个公式非常简单,意思是1pg等于0.001ng。
也就是说,如果我们要将pg转换成ng,只需要将pg的数值乘以0.001即可得到ng的数值。
相反地,如果我们要将ng转换成pg,只需要将ng的数值除以0.001即可得到pg的数值。
举个例子,假设我们有一块质量为5pg的物体,我们想将其转换成ng。
根据上面的公式,我们只需要将5pg乘以0.001,即可得到5pg等于0.005ng。
同样地,如果我们有一块质量为8ng的物体,我们想将其转换成pg,只需要将8ng除以0.001,即可得到8ng等于8000pg。
除了上面的简单计算公式外,我们还可以通过使用单位换算器来进行pg到ng的转换。
单位换算器是一种非常方便的工具,可以帮助我们快速准确地进行单位转换。
在单位换算器中,我们只需要输入要转换的数值和单位,然后选择要转换成的单位,即可得到转换后的数值。
这样可以避免手动计算过程中出现的错误,同时也可以节省时间和精力。
总的来说,从pg到ng的计算公式非常简单,只需要将pg的数值乘以0.001即可得到ng的数值。
如果我们需要进行大量的单位转换,可以使用单位换算器来提高效率。
希望本文能够帮助大家更好地理解pg到ng的单位转换过程,同时也能够在实际应用中起到一定的指导作用。
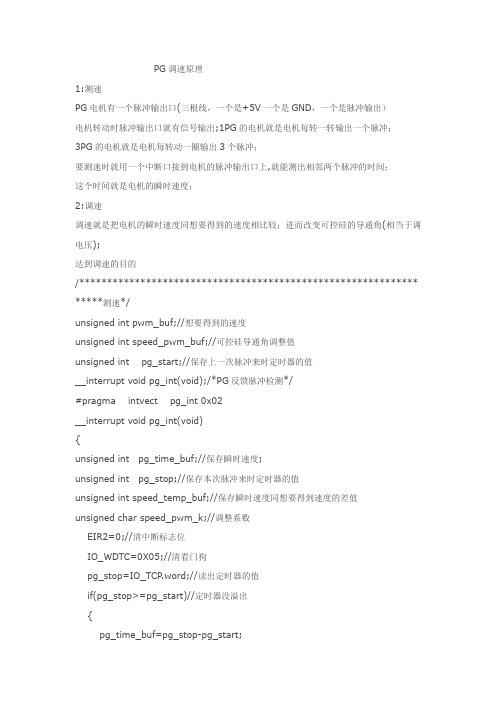
PG调速原理

PG调速原理1:测速PG电机有一个脉冲输出口(三根线,一个是+5V一个是GND,一个是脉冲输出)电机转动时脉冲输出口就有信号输出;1PG的电机就是电机每转一转输出一个脉冲;3PG的电机就是电机每转动一圈输出3个脉冲;要测速时就用一个中断口接到电机的脉冲输出口上,就能测出相邻两个脉冲的时间;这个时间就是电机的瞬时速度;2:调速调速就是把电机的瞬时速度同想要得到的速度相比较;进而改变可控硅的导通角(相当于调电压);达到调速的目的/************************************************************* *****测速*/unsigned int pwm_buf;//想要得到的速度unsigned int speed_pwm_buf;//可控硅导通角调整值unsigned int pg_start;//保存上一次脉冲来时定时器的值__interrupt void pg_int(void);/*PG反馈脉冲检测*/#pragma intvect pg_int 0x02__interrupt void pg_int(void){unsigned int pg_time_buf;//保存瞬时速度;unsigned int pg_stop;//保存本次脉冲来时定时器的值unsigned int speed_temp_buf;//保存瞬时速度同想要得到速度的差值unsigned char speed_pwm_k;//调整系数EIR2=0;//清中断标志位IO_WDTC=0X05;//清看门狗pg_stop=IO_TCP.word;//读出定时器的值if(pg_stop>=pg_start)//定时器没溢出{pg_time_buf=pg_stop-pg_start;}else//定时器已经溢出{pg_time_buf=50000;pg_time_buf=(pg_time_buf-pg_start)+pg_stop;}pg_start=pg_stop;//交换本次脉冲来时定时器的值作为下次的值speed_count++;if(speed_count<=6)//多测几次;相当于滤波{return;}speed_count=0;if(pg_time_buf==pwm_buf)//假如瞬时速度等于想要得到速度{speed_up_buf=0;//正偏差量清零speed_down_buf=0;//负偏差量清零return;}if(pg_time_buf>pwm_buf)//假如瞬时速度小于想要的速度{speed_temp_buf=pg_time_buf-pwm_buf;//得到瞬时速度同想要得到速度的差值speed_up_buf++;//正偏差量增加speed_down_buf=0;}if(pg_time_buf<pwm_buf)//假如瞬时速度大于想要的速度{speed_temp_buf=pwm_buf-pg_time_buf;//得到瞬时速度同想要得到速度的差值speed_down_buf++;//负偏差量增加speed_up_buf=0;}if(speed_temp_buf<=100)//如果瞬时速度同想要得到速度的差值比较小{speed_pwm_k=101-speed_temp_buf;//调整系数比较大}else//如果瞬时速度同想要得到速度的差值比较大{speed_pwm_k=1;//调整系数比较小}if(speed_up_buf>=speed_pwm_k)//如果是正偏差量就减小可控硅导通角(加速) {speed_pwm_buf-=1;speed_up_buf=0;}if(speed_down_buf>=speed_pwm_k)//如果是负偏差量就加大可控硅导通角(减速){speed_pwm_buf+=1;speed_down_buf=0;}}//注意速度大小和测得的相邻脉冲时间大小成反比///////////////////////////////////////////////////////unsigned char pwm_pinter;unsigned char speed_up_buf,speed_down_buf,speed_count;extern void mode_turn(void);extern void iic_read_task(void);extern void iic_write_task(void);extern void temp_test_task(void);/*********************************************同步*/__interrupt void zero_int(void);/*过零检测*/#pragma intvect zero_int 0x01__interrupt void zero_int(void){EIR1=0;//清中断标志位IO_WDTC=0X05;//清看门狗NFJ_IO=0;//关断内风机IO_CNTR.byte=0X28;//停止可控硅导通角计算定时器IO_ILR3=0Xff;pwm_pinter=1;//if(fan_able_bit)//假如可以开风机{if(speed_pwm_buf<=80)//限定可控硅导通角最小值{speed_pwm_buf=80;//此时风机速度最高}if(speed_pwm_buf>220)//限定可控硅导通角最大值{speed_pwm_buf=220;//此时风机速度最低}IO_CNTR.byte=0xf7&IO_CNTR.byte;IO_ILR3=0XFB;IO_COMR=speed_pwm_buf;//给可控硅导通角计算定时器赋值;因为第一部分哪里随时在改变speed_pwm_buf的值所以可控硅导通角计算定时器随时在变IO_CNTR.byte=0X29;}else{speed_pwm_buf=150;////可控硅导通角默认值}}////////////////////////////////////////////////////////////__interrupt void pwm_int(void);#pragma intvect pwm_int 0x09__interrupt void pwm_int(void)/*PG调速*/{IO_CNTR.byte=0X28;if(pwm_pinter>1)//触发脉冲(下降沿){pwm_pinter=0;NFJ_IO=0;IO_ILR3=0Xff;}else//调整的导通角时间到产生触发脉冲(上升沿){pwm_pinter=2;NFJ_IO=1;IO_CNTR.byte=0xf7&IO_CNTR.byte;IO_ILR3=0XFB;IO_COMR=80;IO_CNTR.byte=0X29;}}/***********************************************把风机速度转换为时间周期*///pwm_buf=60*f/转数*PG数*分频比(f=8000000)unsigned int pwm_buf;#define hight_speed 7936//1260高风#define mid_speed 9346//1070中风#define low_speed 10869//920低风#define low_low_speed 16666//600超低风if(hight_bit)//{pwm_buf=7936;//1260}if(mid_bit){pwm_buf=9524;//1050}if(low_bit){pwm_buf=10869;//920}//////////////////////////////////////////////////////实际空调程序中测速定时器和遥控接收定时器;主定时器和用意个Timer 显示用一个定时器TimerPG触发脉冲定时器用一个Timer最少要用3个Timer(没有PG调速就可只用两个)。
PG调速原理
PG调速原理1:测速PG电机有一个脉冲输出口(三根线,一个是+5V一个是GND,一个是脉冲输出)电机转动时脉冲输出口就有信号输出;1PG的电机就是电机每转一转输出一个脉冲;3PG的电机就是电机每转动一圈输出3个脉冲;要测速时就用一个中断口接到电机的脉冲输出口上,就能测出相邻两个脉冲的时间;这个时间就是电机的瞬时速度;2:调速调速就是把电机的瞬时速度同想要得到的速度相比较;进而改变可控硅的导通角(相当于调电压);达到调速的目的/************************************************************* *****测速*/unsigned int pwm_buf;//想要得到的速度unsigned int speed_pwm_buf;//可控硅导通角调整值unsigned int pg_start;//保存上一次脉冲来时定时器的值__interrupt void pg_int(void);/*PG反馈脉冲检测*/#pragma intvect pg_int 0x02__interrupt void pg_int(void){unsigned int pg_time_buf;//保存瞬时速度;unsigned int pg_stop;//保存本次脉冲来时定时器的值unsigned int speed_temp_buf;//保存瞬时速度同想要得到速度的差值unsigned char speed_pwm_k;//调整系数EIR2=0;//清中断标志位IO_WDTC=0X05;//清看门狗pg_stop=IO_TCP.word;//读出定时器的值if(pg_stop>=pg_start)//定时器没溢出{pg_time_buf=pg_stop-pg_start;}else//定时器已经溢出{pg_time_buf=50000;pg_time_buf=(pg_time_buf-pg_start)+pg_stop;}pg_start=pg_stop;//交换本次脉冲来时定时器的值作为下次的值speed_count++;if(speed_count<=6)//多测几次;相当于滤波{return;}speed_count=0;if(pg_time_buf==pwm_buf)//假如瞬时速度等于想要得到速度{speed_up_buf=0;//正偏差量清零speed_down_buf=0;//负偏差量清零return;}if(pg_time_buf>pwm_buf)//假如瞬时速度小于想要的速度{speed_temp_buf=pg_time_buf-pwm_buf;//得到瞬时速度同想要得到速度的差值speed_up_buf++;//正偏差量增加speed_down_buf=0;}if(pg_time_buf<pwm_buf)//假如瞬时速度大于想要的速度{speed_temp_buf=pwm_buf-pg_time_buf;//得到瞬时速度同想要得到速度的差值speed_down_buf++;//负偏差量增加speed_up_buf=0;}if(speed_temp_buf<=100)//如果瞬时速度同想要得到速度的差值比较小{speed_pwm_k=101-speed_temp_buf;//调整系数比较大}else//如果瞬时速度同想要得到速度的差值比较大{speed_pwm_k=1;//调整系数比较小}if(speed_up_buf>=speed_pwm_k)//如果是正偏差量就减小可控硅导通角(加速) {speed_pwm_buf-=1;speed_up_buf=0;}if(speed_down_buf>=speed_pwm_k)//如果是负偏差量就加大可控硅导通角(减速){speed_pwm_buf+=1;speed_down_buf=0;}}//注意速度大小和测得的相邻脉冲时间大小成反比///////////////////////////////////////////////////////unsigned char pwm_pinter;unsigned char speed_up_buf,speed_down_buf,speed_count;extern void mode_turn(void);extern void iic_read_task(void);extern void iic_write_task(void);extern void temp_test_task(void);/*********************************************同步*/__interrupt void zero_int(void);/*过零检测*/#pragma intvect zero_int 0x01__interrupt void zero_int(void){EIR1=0;//清中断标志位IO_WDTC=0X05;//清看门狗NFJ_IO=0;//关断内风机IO_CNTR.byte=0X28;//停止可控硅导通角计算定时器IO_ILR3=0Xff;pwm_pinter=1;//if(fan_able_bit)//假如可以开风机{if(speed_pwm_buf<=80)//限定可控硅导通角最小值{speed_pwm_buf=80;//此时风机速度最高}if(speed_pwm_buf>220)//限定可控硅导通角最大值{speed_pwm_buf=220;//此时风机速度最低}IO_CNTR.byte=0xf7&IO_CNTR.byte;IO_ILR3=0XFB;IO_COMR=speed_pwm_buf;//给可控硅导通角计算定时器赋值;因为第一部分哪里随时在改变speed_pwm_buf的值所以可控硅导通角计算定时器随时在变IO_CNTR.byte=0X29;}else{speed_pwm_buf=150;////可控硅导通角默认值}}////////////////////////////////////////////////////////////__interrupt void pwm_int(void);#pragma intvect pwm_int 0x09__interrupt void pwm_int(void)/*PG调速*/{IO_CNTR.byte=0X28;if(pwm_pinter>1)//触发脉冲(下降沿){pwm_pinter=0;NFJ_IO=0;IO_ILR3=0Xff;}else//调整的导通角时间到产生触发脉冲(上升沿){pwm_pinter=2;NFJ_IO=1;IO_CNTR.byte=0xf7&IO_CNTR.byte;IO_ILR3=0XFB;IO_COMR=80;IO_CNTR.byte=0X29;}}/***********************************************把风机速度转换为时间周期*///pwm_buf=60*f/转数*PG数*分频比(f=8000000)unsigned int pwm_buf;#define hight_speed 7936//1260高风#define mid_speed 9346//1070中风#define low_speed 10869//920低风#define low_low_speed 16666//600超低风if(hight_bit)//{pwm_buf=7936;//1260}if(mid_bit){pwm_buf=9524;//1050}if(low_bit){pwm_buf=10869;//920}//////////////////////////////////////////////////////实际空调程序中测速定时器和遥控接收定时器;主定时器和用意个Timer 显示用一个定时器TimerPG触发脉冲定时器用一个Timer最少要用3个Timer(没有PG调速就可只用两个)。
浅谈FX2n―1PG的定位控制[权威资料]
![浅谈FX2n―1PG的定位控制[权威资料]](https://img.taocdn.com/s3/m/15b0a7c627fff705cc1755270722192e453658f8.png)
浅谈FX2n―1PG的定位控制本文档格式为WORD,感谢你的阅读。
摘要:在定位控制系统中,常常需要采用大量的传感器作定位控制,使得在工程中安装的位置控制器较多,而且在较远程的位置安装更不方便,容易受外界的影响出现信号误差,造成位置偏差。
本文主要介绍三菱PLC定位模块1PG 在定位控制中的应用,并通过实例介绍了与PLC的硬件联接与软件编程方法。
关键词:定位模块控制运行方式位置控制在自动化控制工业领域中,一直是人们关注的问题。
位置控制从初始的机械开关再到现在的传感器,定位控制从以前通过编码器反馈信号到现在的1PG、20GM等定位模块,人们一直在想办法让位置控制变得更可靠、更便捷。
对于定位控制,PLC无疑是被首先选择的,它可靠性高,程序编辑、修改和调试便捷。
另外,在PLC扩展一个定位模块无需在硬件处理上花太多的精力,而且它可以采用积木式结构不断扩展,从而有效地控制1台到8台的定位模块可实现多轴联动的控制方式。
一、FX2n-1PG简介FX2n-1PG脉冲输出模块相当于一种脉冲发生器单元。
1PG脉冲输出模块是一种根据PLC功能指令FROM/TO指令进行与FX系列PLC进行数据交换的特殊功能模块。
用一台FX-1PG 脉冲模块可以独立进行轴定位控制,而一台PLC则最多可连接8台1PG,也就是说可以实现8个独立的操作。
FX-1PG脉冲输出模块的主要技术指标如下:①可输出最高频率为100kbit/s的脉冲;②定位目标的追踪、运转速度及各种参数通过PLC用FROM/TO指令设定;③除脉冲序列输出外,还备有各种高速响应的输出端子,而其他的I/O通常需要通过PLC进行控制;④编制定位用程序不需专用程序设计工具,用PLC的程序就可以控制。
定位数据的设定和瞬时位置的显示均可通过PLC实现。
二、系统的组成及控制方式FX2n-1PG系统的组成要观察现场实际需要而定。
例如,只用1PG控制独轴,即设备在单轨道上左右运行时,系统就较为简单,如图1所示。
1GP特殊功能模块的使用
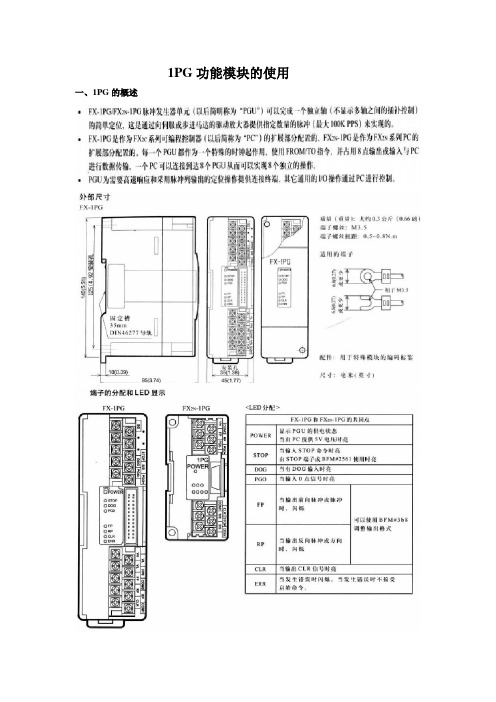
1PG功能模块的使用一、1PG的概述二、缓冲存储器(BFM)的分配注:PGO为原点检测,DOG为减速点检测,STOP为行程终端检测。
以下讲述的是用FX2N-1PG控制步进电机使用FX2N-1PG控制,首先要对其缓冲存储器(BFM)进行设定,BFM总共有32个地址单元,每个地址单元有16位,通过改变这32个地址单元的值来进行控制。
主要理解#25、#26、#27、#28中每一位表示的含意。
#25为操作命令,#27、#26为当前位置,#28为状态和错误代码,以下将有介绍。
其它的单元的内容查看三菱《FX系列特殊功能模块用户手册》说明书的FX2N-1PG功能模块的介绍。
PLC通过FROM/TO功能指令对FX2N-1PG中缓冲存储器的值进行读/写。
不同操作模式和缓存设置三、TO/FROM指令的概述四、程序实例用此功能模块控制SX-815L设备上机器人的直行运行。
(1).FX2N-1PG输出模式为脉冲输出模式。
既能实现JOG操作,又可以定位运行。
(2).缓冲存储器设置1.将#3的值设为H100,即为脉冲输出模式,改变BFM#3的值就可以改变1PG 的输出模式(请参照BFM列表)。
最大速度(BFM#4)设为k9000,基速(BFM#6)设为k300,JOG速度(BFM#7)设为k6000,原点返回速率(BFM#9)设为k6000,回原点过减速点后的爬行速率(BFM#11)为k2000,原点返回的0点个数即POG 的输入次数(BFM#12)设为1,原点的位置(BFM#13)设为0,加减速时间设为可k300.(3).操作命令(BFM#25)设置注意:BFM#25b6到b4和b12到b8中只有一位可以置位,如果其中有两个或更多被置位,不会有操作执行。
(4).状态和错误代码读取(BFM#28)如:将BFM#28中的值送入K4M100中,把BFM#28的状态标志位通过M100~M116表示,PLC可通过这辅助继电器来做出判断。
三菱PLCFX2N系列FX1PGFX2N-1PG模块用户手册中文高清版

工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
工控编程吧 工控编程吧
常见单位换算
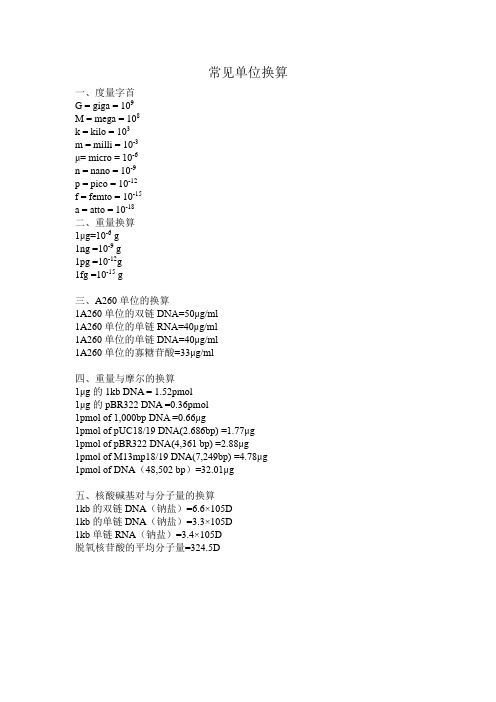
常见单位换算一、度量字首G = giga = 109M = mega = 108k = kilo = 103m = milli = 10-3μ= micro = 10-6n = nano = 10-9p = pico = 10-12f = femto = 10-15a = atto = 10-18二、重量换算1μg=10-6 g1ng =10-9 g1pg =10-12g1fg =10-15 g三、A260单位的换算1A260单位的双链DNA=50μg/ml1A260单位的单链RNA=40μg/ml1A260单位的单链DNA=40μg/ml1A260单位的寡糖苷酸=33μg/ml四、重量与摩尔的换算1μg的1kb DNA = 1.52pmol1μg的pBR322 DNA =0.36pmol1pmol of 1,000bp DNA =0.66μg1pmol of pUC18/19 DNA(2.686bp) =1.77μg1pmol of pBR322 DNA(4,361 bp) =2.88μg1pmol of M13mp18/19 DNA(7,249bp) =4.78μg1pmol of DNA(48,502 bp)=32.01μg五、核酸碱基对与分子量的换算1kb的双链DNA(钠盐)=6.6×105D1kb的单链DNA(钠盐)=3.3×105D1kb单链RNA(钠盐)=3.4×105D脱氧核苷酸的平均分子量=324.5D六、常见核酸的分子量七、核酸碱基分子量AMP 347.2CMP 323.2GMP 363.3UMP 324.2dAMP 331.2dCMP 307.2dGMP 347.2dTMP 322.2八、蛋白质重量的换算100pmoles of 100,000 dalton protein=10μg 100pmoles of 500,000 dalton protein=5μg 100pmoles of 10,000 dalton protein=1μg九、蛋白质与核酸的换算lkb DNA=333个氨基酸的编码能力333个氨基酸3.7×104D(道尔顿)10,000D蛋白质=270bp DNA30,000D蛋白质=810bp DNA50,000D蛋白质=1.35kb DNA100,000D蛋白质=2.7kb DNA。
FX2N-1PG学习笔记(完成)
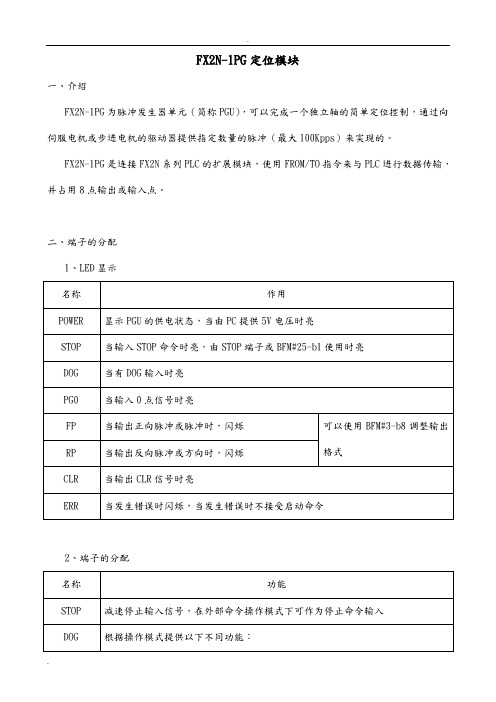
FX2N-1PG定位模块一、介绍FX2N-1PG为脉冲发生器单元(简称PGU),可以完成一个独立轴的简单定位控制,通过向伺服电机或步进电机的驱动器提供指定数量的脉冲(最大100Kpps)来实现的。
FX2N-1PG是连接FX2N系列PLC的扩展模块,使用FROM/TO指令来与PLC进行数据传输,并占用8点输出或输入点。
二、端子的分配1、LED显示2、端子的分配3、步进电机接线图.4、三菱伺服电机MR-E接线图.三、缓冲存储器BFM一览表四、参数设置1、BFM#0 脉冲速率是驱动器使电机旋转一圈所需要的输入脉冲的数目,它不一定是电机每一圈所产生的编码器脉冲数目,根据电子齿轮比而有所不同。
注:如果电机系统的单位被选择时,无须设置该参数。
2、BFM#2、#1 进给速率是电机转动一圈时的机器移动量,根据用途有不同的单位。
注:如果电机系统的单位被选择时,无须设置该参数。
3、BFM#31)单元系统(b1、b0)影响的位置数据:HP、P1、P2、CP;影响的速度数据:V max、V bia、V JOG、V RT、V1、V2;2)定位数据的倍数(b5、b4)注:定位数据HP、P1、P2和CP均可以如上表中所示的倍数。
3)脉冲输出格式(b8)设置为0时,为正反脉冲输出;(FP发出正脉冲;RP发出反脉冲)设置为1时,为方向与脉冲输出。
(FP发出方向信号;RP发出脉冲信号)4)旋转方向(b9)设置为0时,每一个前向脉冲(FP),当前位置(CP)值就增加一次;(顺向)设置为1时,每一个前向脉冲(FP),当前位置(CP)值就减少一次。
(反向)5)原点返回方向(b10)设置为0时,在返回原点的过程中当前位置(CP)值减少;(反向)设置为1时,在返回原点的过程中当前位置(CP)值增加。
(顺向)6)DOG输入极性(b12)设置为0时,当工件接近原点时,DOG(近原点信号)打开;设置为1时,当工件接近原点时,DOG(近原点信号)关闭。
管道DG、DN、PG、PN的区别

管道DG、DN、PG、PN的区别Pg、Dg是部标叫法,DN、PN是国标叫法。
在部标里Pg的单位是“kgf/cm2(公斤力/平方厘米)”,在国标里PN的单位是“MPa(兆帕)”,即1Pg=0.1PN;Pg、PN的名称都叫“公称压力”。
Dg=DN,在部标、国标里Dg、DN的单位都是“mm(毫米)“,Dg、DN的名称都叫“公称通径”。
DN和De、Dg的区别:1、DN是指管道的公称直径,这既不是外径也不是内径(应该与管道工程发展初期与英制单位有关,通常用来描述镀锌钢管)。
它与英制单位的对应关系如下:4分管:4/8英寸:DN15;6分管:6/8英寸:DN20;1寸管:1英寸:DN25;寸二管:1又1/4英寸:DN32;寸半管:1又1/2英寸:DN40;两寸管:2英寸:DN50;三寸管:3项寸:DN80(很多地方也标为DN75);四寸管:4英寸:D民100;2、管道De主要是指管道外径(一般采用De标注的,均需要标注成外径*壁厚的形式),主要用于描述:无缝钢管、PVC等塑料管道和其它需要明确壁厚的管材。
拿镀锌焊接钢管为例,用DN、De两种标注方式如下:DN20:De25*2.5mm DN25:De32*3mmDN32:De40*4mm DN40:De50*4mm我们习惯于使用DN来标注焊接钢管,在不涉及到壁厚的情况下很少使用De来标注管道;但是标注塑料管道就又是另外一回事了,还是跟行业习惯有关,在实际施工过程中我们简略称呼的20、25、32等管道均是指De,而不是指DN。
另外据在现场的实践经验:a、两种管道材料的连接方式不外乎丝扣连接和法兰连接;b、镀锌钢管、PPR管均能采用以上两种连接,只是小于50的管道用丝扣较方便,大于50的用法兰比较可靠;c、如果是两种不同材质的金属管道相连,要考虑是否会产生原电池反应,否则会加速活跃金属材料管道的腐蚀速度,最好要用法兰连接,并用橡胶垫片类的绝缘材质将两种金属分隔开,包括螺栓都要用垫片分隔,避免接触。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、AL.E6 -伺服紧急停止。
引起此故障的原因一般有两个,一个是控制回路24V电源没有接入,
另一个是CN1口EMG和SG之间没有接通。
2、AL.37-参数异常。
内部参数乱,操作人员误设参数或者驱动器受外部干扰导致。
一般参数恢
复成出厂值即可解决。
3、AL.16-编码器故障。
内部参数乱或编码器线故障或电机编码器故障。
参数恢复出厂值或者更
换线缆或者更换电机编码器,若故障依旧,则驱动器底板损坏。
4、AL.20-编码器故障。
电机编码器故障或线缆断线、接头松动等导致。
更换编码器线或伺服电
机编码器。
MR-J3系列发生此故障时,还有一种可能是驱动器CPU接地线烧断导致。
5、AL.30-再生制动异常。
若刚通电就出现报警,则驱动器内部制动回路元件损坏。
若在运行过
程中出现,可检查制动回路接线,必要时外配制动电阻。
6、AL.50、AL.51-过载。
检查输出U、V、W三相相序接线是否正确,伺服电机三相线圈烧坏或接地故障。
监控伺服电机负载率是否长时间超过100%,伺服响应参数设置过高,产生共振等原因。
7、AL.E9-主回路断开。
检查主回路电源是否接入,若正常则主模块检测回路故障,须更换驱动
器或配件。
8、AL.52-误差过大。
电机编码器故障或驱动器输出模块回路元件损坏,通常油污较多的使用场
合此故障较多。