AVR单片机绘图函数库(Syany)
AVR单片机绘图函数库(Syany)
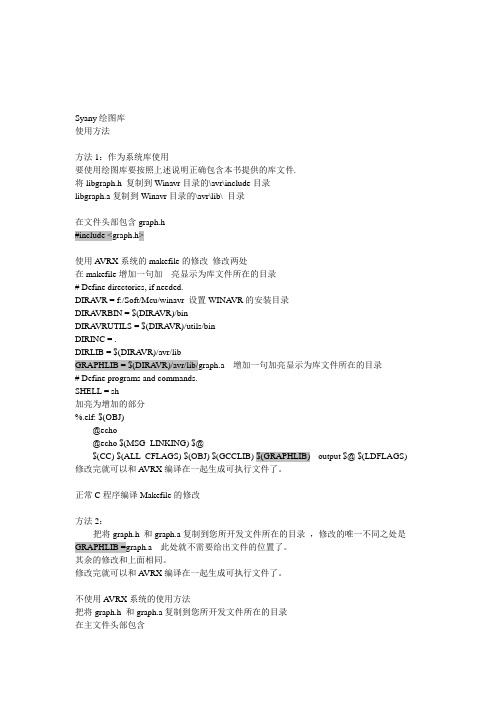
Syany绘图库使用方法方法1:作为系统库使用要使用绘图库要按照上述说明正确包含本书提供的库文件.将libgraph.h 复制到Winavr目录的\avr\include目录libgraph.a复制到Winavr目录的\avr\lib\ 目录在文件头部包含graph.h#include <graph.h>使用A VRX系统的makefile的修改修改两处在makefile增加一句加亮显示为库文件所在的目录# Define directories, if needed.DIRA VR = f:/Soft/Mcu/winavr 设置WINA VR的安装目录DIRA VRBIN = $(DIRA VR)/binDIRA VRUTILS = $(DIRA VR)/utils/binDIRINC = .DIRLIB = $(DIRA VR)/avr/libGRAPHLIB = $(DIRA VR)/avr/lib/graph.a 增加一句加亮显示为库文件所在的目录# Define programs and commands.SHELL = sh加亮为增加的部分%.elf: $(OBJ)@echo@echo $(MSG_LINKING) $@$(CC) $(ALL_CFLAGS) $(OBJ) $(GCCLIB) $(GRAPHLIB) --output $@ $(LDFLAGS) 修改完就可以和A VRX编译在一起生成可执行文件了。
正常C程序编译Makefile的修改方法2:把将graph.h 和graph.a复制到您所开发文件所在的目录,修改的唯一不同之处是GRAPHLIB =graph.a 此处就不需要给出文件的位置了。
其余的修改和上面相同。
修改完就可以和A VRX编译在一起生成可执行文件了。
不使用AVRX系统的使用方法把将graph.h 和graph.a复制到您所开发文件所在的目录在主文件头部包含#include“graph.h”用Mfile生成您系统所需的Makefile,然后增加下面所示的内容。
AVR单片机入门详细介绍
4. 编程烧入器
编程烧入器也称为程序烧入器或编程器,它的作用是将开 发人员编写生成的嵌入式系统的二进制运行代码下载(写入) 到单片机的程序存储器中。
万用编程器,它不仅可以下载运行代码到多种类型和型号的单 片机中,还可以对EPROM、PAL、GAL等多种器件进行编程。
AVR单片嵌入式系统的软件开发平台
1.汇编语言开发平台
如果你对单片机的内部结构和汇编语言根本不了解,请 先不要用C语言编程。
如果你对单片机的内部结构和汇编语言根本不了解,也 写不出好的单片机的C程序。
二. 单片嵌入式系统的开发软件平台
好的单片嵌入式系统的开发软件通常具备以下几个重要的功能:
单片机系统程序编写和运行代码的生成。(编辑、编译功能) 嵌入式系统开发平台支持用户采用专用汇编程序设计语
采用汇编语言开发系统程序的优点:能够全面和深入的理解 单片机硬件的功能,充分发挥单片机的硬件特性。汇编语言编写 的程序可读性、可移植性和结构性都较差。采用汇编语言编开发 单片机应用系统程序比较麻烦,调试和排错也比较困难,产品开 发周期长,同时要求软件设计人员要具备相当高的能力和经验。
3.高级语言 高级语言是一种“基本”不依赖硬件的程序设计语言。
采用JTAG硬件调试接口进行仿真调试也是实时的在线调 试。不同的是,采用这种方式的调试不需要将芯片取下,用户 得到的运行数据就是芯片本身运行的真实数据,所以这种调试 手段和方式称为实时在片调试(On Chip Debug),并正在替 代传统的实时再板仿真调试(On Board Debug)技术。
AVR单片机C语言编程

步骤2
将时钟芯片的数据输入/输出引脚连接到AVR单片机的I/O口
步骤4
完善程序,实现时钟芯片的读写功能和数据显示
步骤3
通过编写C语言程序,读取时钟芯片的实时时间数据,并将数据存储到指定的变量中
AVR单片机C语言编程常见问题及解决方案
05
总结词:在烧录程序时,AVR单片机可能因为各种原因导致程序无法成功烧录到芯片中。
使用编译器调试功能:使用编译器的调试功能可以帮助定位错误所在位置,以便更准确地解决问题。
程序编译时出现错误或警告
AVR单片机C语言编程的进阶学习建议
06
阅读经典应用案例和项目经验
通过阅读成功的项目案例,了解AVR单片机在各个领域的应用情况及技术实现。
参考优秀的代码库和开源项目
学习并理解其他开发者分享的代码库和开源项目,掌握优秀的编程技巧和经验。
AVR单片机的开发环境和工具链
03
Atmel Studio
01
Atmel旗下的集成开发环境(IDE),支持AVR系列单片机的设计与开发。
AVR单片机的开发环境
WinAVR
02
在Windows平台上进行AVR单片机开发的开源集成开发环境(IDE)。
AVR-GCC
03
AVR单片机的C编译器,可将C语言源码编译成可在AVR单片机上运行的二进制代码。
参加线下技术研讨会和培训课程
参加相关的学习研讨会、技术分享会和培训课程,与行业专家面对面交流,深入了解AVR单片机领域的最新动态和发展趋势。
参加相关的技术论坛和社区交流活动
THANKS
感谢观看
程序无法烧录成功
程序运行时出现异常
总结词:在编译程序时,编译器可能会给出错误或警告信息,这些信息可能是由于代码语法错误、类型转换不正确等原因引起的。
AVR单片机位操作的C语言编程实现

} BYTE_BIT; //B 口宏定义,此值参见相应头文件。 #define_PINB ox23 #define_DDRB ox24 #define PORTB ox25 //定义 B 端口每个位,进行地址绑定。 #define PINB_BITO (*(volatileBYTE_BIT*)(_PINB)).BTTO PINB_BITl BITl…… #dcfinc PORTB_BIT0(*(volatilcBYTE_BIT*)(_PORTB))BIT0 PORTB_BIT1 BIT1…… #define DDRB BITO (*(volatilcBYTE_BIT*)(_DDRB)BITO DDRB_B1T1 Bitl…… 对各端口依同一规律均进行各位的定义即可。 结合头文件的相关定义,重新对其特定地址进行另外的绑定,结合位域的概念,进而一步步 将各寄存器由一个字节分成了可操控的 8 个位。在上述文件中,笔者仅表述了 B 端口。另外, Atmega48 的端口不完全,只有 B、C、D 口,没有 A 口,且 D 口为 8 位,C 口为 6 位,B 口为 7 位,若外接晶体,则 PB6 和 PB7 不能另作端口运用。所以,端口很不完整,但为了保持位域完 整性和一致性,便于理解,将 B、C、D 三口均作 8bit 对待。实际操作时,千万注意不要去操作 那些实际不存在的位。当然,若感兴趣,大家可改动头文件相关定义,来完善它。 为验证这个头文件,笔者很快编写了一个测试程序 Beep.c,具体如下: Beep.c 程序代码 #include<iom48r.h> #include"avr_bith”//包含自定义头文件 #define time 40000 Void beepcunsigned int); Void portint(); Void main(); { while(1) { portint(); beep(time); } } Void beep cunsigned intr)//蜂鸣器发声函数 { unsignedinti; PORTB_BIT0=0;//PB0 输出低电平 for{i=r,i>o,i..) PORTB_BIT0=1;//PB0 输出高电平 for(i=r;i>0;i..) } void portint()端口初始化函数
AVR库函数介绍

CodeVisionA VR C Library Functions ReferenceCodeVisionA VR C 库函数介绍译自CodeVisionA VR C Compiler Help目录:1. Character Type Functions -字符类型函数2. Standard C Input/Output Functions -标准输入输出函数3. Standard Library Functions -标准库和内存分配函数4. Mathematical Functions -数学函数5. String Functions -字符串函数6. BCD Conversion Functions - BCD 转换函数7. Memory Access Functions -存储器访问函数8. Delay Functions -延时函数9. LCD Functions - LCD函数10. LCD Functions for displays with 4x40 characters -4×40字符型LCD函数11. LCD Functions for displays connected in 8 bit memory mapped mode -以8位外部存储器模式接口的LCD显示函数12. I2C Bus Functions - I2C总线函数13. National Semiconductor LM75 Temperature Sensor Functions - LM75温度传感器函数14. Dallas Semiconductor DS1621 Thermometer/Thermostat Functions - DS1621温度计函数15. Philips PCF8563 Real Time Clock Functions - PCF8563实时时钟函数16. Philips PCF8583 Real Time Clock Functions - PCF8583实时时钟函数17. Dallas Semiconductor DS1302 Real Time Clock Functions - DS1302实时时钟函数18. Dallas Semiconductor DS1307 Real Time Clock Functions - DS1307实时时钟函数19. 1 Wire Protocol Functions -单线通讯协议函数20. Dallas Semiconductor DS1820/DS1822 Temperature Sensors Functions - DS1820/1822温度传感器函数21. SPI Functions - SPI函数22.Power Management Functions -电源管理函数23.Gray Code Conversion Functions -格雷码转换函数前言:如果你要使用库函数,就必须用 #include 包含相应的头文件。
基于AVR的绘图型12864图形库文件

#define __avr_huitu12864_h
#include <_const.h>
#include <math.h>
#define uchar unsigned char
#define uint unsigned int
{
uchar i;
rd_data();//读空
for(i=0;i<z;i++)
{
rd_onebytel(x,y+i);
rd_zhanchun[i]=read_dat;
}
}
void point(uchar x,uchar y,uchar zheng)
void delay_5us(uint n)
{
for(;n>0;n--);
}
void delay_ms(uint n)
{
uint i;
for(;n>0;n--)
for(i=0;i<1140;i++);
}
void init(void)
{
DDRA=0xff;
wr_command(0xc0); //起始行地址
wr_command(0xb8 + x/8);//页地址
wr_command(0x40 + y); //列地址0-63
rd_data();//读空
rd_data();
if(zheng==1)
{
xieru=0x00;
PORTA=0xff;
PORTC&=~RS; //RS=0
AVR单片机C语言编程

AVR单片机广泛应用于各种领域,如智能家居、电子门锁、自动控制等。
AVR单片机的应用领域
AVR单片机的特点和应用领域
AVR单片机的主要产品线
AVR单片机主要有ATmega和ATtiny两个系列,其中ATmega系列单片机具有较高的性能和丰富的外设接口,适用于较为复杂的控制系统。
AVR单片机的主要型号
AVR单片机的起源
1980年代,美国国家半导体公司推出了第一片AVR单片机,它具有高性能、可编程和低功耗的特点。
AVR单片机的诞生
随着技术的不断发展,AVR单片机逐渐被广泛应用于各种领域,包括工业控制、智能家居、汽车电子等。
AVR单片机的成长
AVR单片机具有高性能、可编程、低功耗、易于开发等特点。
内存限制
AVR单片机的寄存器是直接映射到内存中的,必须了解寄存器的使用方法;
寄存器访问
AVR单片机的中断处理需要特别注意,必须了解中断源、中断向量表和中断处理程序编写等。
中断处理
01
关键字
C语言中的关键字和数据类型
02
数据类型
03
特殊关键字
04
数据类型扩展
04
AVR单片机的编程实例
总结词:基本了解
定时器和中断的使用
串口通信的实现
总结词:高级应用
详细描述:串口通信是AVR单片机中非常常用的通信方式之一,通过串口通信可以实现多个设备之间的数据传输和通信。本节将介绍串口通信的基本原理和实现方法,包括串口的接口电路和程序代码,让读者能够了解串口通信的基本框架和应用技巧。同时,通过实际案例来讲解串口通信的实现方法,让读者更好地掌握相关知识。
详细描述:AVR Studio的安装和设置包括以下步骤
AVR-GCC常见库函数

AVRGCC
include ANSI C 8 8
GNU typedef signed char int8_t
typedef unsigned char uint8_t typedef int int16_t 16
typedef unsigned int uint16_t 16 typedef long int32_t 32
'''' '''' ''''\f'''' ''''\r'''' ''''\t'''' ''''v''''
AVRGCC
EEPROM
EEPROM 0
void eeprom_read_block(void *buf, unsigned int addr, size_t n) addr n buf int eeprom_is_ready() 0 EEPROM (EECR =0)
strcasecmp src
s1 s2 0 str * strstr(const char *s1,const char *s2)
s2
timer.h
include timer.h enum { STOP = 0, CK = 1, CK8 = 2, CK64 = 3, CK256 = 4, CK1024 = 5, /
int isnaf(double x) x (-INF 0xff800000)
0x7f800000) double
AVR单片机教程03
本文由脑雅贡献pdf文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
第四章单片机系统设计与开发工具在学习和掌握如何应用单片机来设计和开发嵌入式系统时,除了首先要对所使用的单片机有全面和深入的了解外,配备和使用一套好的开发环境和开发平台也是必不可缺的。
在嵌入式系统的设计开发中,选用了好的开发工具和开发平台,往往能加速嵌入式应用系统的研制开发、调试、生产和维修,起到事半功倍的效果。
国外许多公司根据不同单片机的性能和特点,研制推出了各种类型的用于开发单片嵌入式系统的单片机开发装置和软件开发平台。
不同类型的单片机使用的开发系统是不同的。
对同一类型的单片机来讲,也有多种类型和功能的开发装置和开发平台。
价格便宜、性能适中的系统在几百元,高性能的开发系统则要数千元到上万元,甚至仅仅一套软件开发平台就要上万元。
虽然设计开发一个嵌入式系统,可以选用多家公司、多种类型的单片机,但在决定学习和使用哪种单片机时,应对单片机的性能价格,开发装置和开发平台的性能价格,以与是否方便使用等,几方面做一个综合的评估。
由于 AVR 单片机的程序存储器采用的是可多次下载的 Flash 存储器,具有可在线下载(ISP)等的优良特性,给学习和使用都带来极大的方便。
本章将在介绍单片机嵌入式系统设计开发基础知识后,重点讲述本书推荐和使用的一套采用 C 高级语言的软件开发平台—CodeVisionAVR(简称 CVAVR),和一套简易并且开放的,集下载编程、实验开发一体的实验板。
4.1 单片机嵌入式应用系统设计4.1.1 单片机嵌入式系统开发所需的基础知识和技能在 IT 行业,应用系统设计可以分成两大类,一类用于科学计算、数据处理、企业管理、 Internet 建立等;另一类用于工业过程检测控制、智能仪表仪器和自动化设备、小型电子系统、通信设备、家用电器等。
对于前一类的应用系统设计,通常都是基于通用计算机系统和网络的系统开发,硬件设备也是通用的,可以从市场购买,而其主要的工作是软件开发,使用的开发平台以 C++、VB、数据库系统、建立开发平台等。
AVR单片机ppt教程课件

三、中断屏蔽与管理
AVR对中断采用两级控制方式。 为全局中断允许控制位:
中断允许的总控制位I(标志寄存器SREG中的I标志位SREG.7) 每一个中断源都设置了独立的中断允许位
这些中断允许位分散位于各中断源所属模块的控制寄存器中。
AVR响应一个可屏蔽中断源(假定为A中断)的中断的条件是:
1.响应A中断 = 全局中断允许标志 AND 中断A允许标志 AND 中断A标志 2.AVR复位后,各个中断允许位以及全局中断允许位均被清零,这保证了 程序在开始执行时(一般程序开头是对芯片内部以及外围系统的初始化配置) 不会受到中断的干扰。 3.在AVR复位后的用户初始化程序中,需要先对需要使用的中断源进行必 要的配置。待系统初始化过程结束后再置位I,使系统进入正常的工作状态, 开始响应中断请求。
4种触发方式中,还有以下的一些不同的特点: 1.低电平触发是不带中断标志类型的,即只要中断输入引脚PD2 或PD3保持低电平,那么将一直会产生中断申请。
2.MCU对INT0和INT1的引脚上的上升沿或下降沿变化的识别 (触发),需要I/O时钟信号的存在(由I/O时钟同步检测), 属于同步边沿触发的中断类型。
3.MCU对INT2的引脚上的上升沿或下降沿变化的识别(触 发),以及低电平的识别(触发)是通过异步方式检测的,不 需要I/O时钟信号的存在。因此,这类触发类型的中断经常作 为外部唤醒源,用于将处在Idle休眠模式,以及处在各种其它 休眠模式的MCU唤醒。这是由于除了在空闲(Idel)模式时, I/O时钟信号还保持继续工作,在其它各种休眠模式下,I/O时 钟信号均是处在暂停状态的。
在ICCAVRR中,只要用#pragma 伪指令和中断向量说明 中断服务程序的入口地址。
中断服务函数按以下格式定义:
avr单片机_教程_实例_附电路图
AVR单片机特点每种MCU都有自身的优点与缺点,与其它8-bit MCU相比,AVR 8-bit MCU最大的特点是:● 哈佛结构,具备1MIPS / MHz的高速运行处理能力;● 超功能精简指令集(RISC),具有32个通用工作寄存器,克服了如8051 MCU采用单一ACC 进行处理造成的瓶颈现象;● 快速的存取寄存器组、单周期指令系统,大大优化了目标代码的大小、执行效率,部分型号FLASH非常大,特别适用于使用高级语言进行开发;● 作输出时与PIC的HI/LOW相同,可输出40mA(单一输出),作输入时可设置为三态高阻抗输入或带上拉电阻输入,具备10mA-20mA灌电流的能力;● 片内集成多种频率的RC振荡器、上电自动复位、看门狗、启动延时等功能,外围电路更加简单,系统更加稳定可靠;● 大部分AVR片上资源丰富:带E2PROM,PWM,RTC,SPI,UART,TWI,ISP,AD,Analog Comparator,WDT等;● 大部分AVR除了有ISP功能外,还有IAP功能,方便升级或销毁应用程序。
● 性价比高。
开发AVR单片机,需要哪些编译器、调试器?AVR Studio IDE、汇编编译器ATMEL AVR Studio集成开发环境(IDE),可使用汇编语言进行开发(使用其它语言需第三方软件协助),集软硬件仿真、调试、下载编程于一体。
ATMEL官方及市面上通用的AVR开发工具都支持AVRStudio。
GCCAVR (WinAVR) C编译器GCC是Linux的唯一开发语言。
GCC的编译器优化程度可以说是目前世界上民用软件中做的最好的,另外,它有一个非常大优点是,免费!在国外,使用它的人几乎是最多的。
但,相对而言,它的缺点是,使用操作较为麻烦。
ICC AVRC编译器(集烧写程序功能)市面上(大陆)的教科书使用它作为例程的较多,集成代码生成向导,虽然它的各方面性能均不是特别突出,但使用较为方便。
AVR单片机教程

AVR单片机教程一、AVR单片机的基本概念AVR(Alf and Vegard's RISC processor)是一种基于精简指令集(RISC)架构的微控制器,由爱尔兰的Atmel公司开发。
AVR系列微控制器以其高性能和低功耗而闻名,常用于嵌入式系统中。
AVR单片机使用C 语言进行编程,可以通过简单的指令完成各种功能。
二、AVR单片机的硬件结构AVR单片机由一个中央处理单元(CPU)、存储器、输入输出(IO)端口和定时器等组成。
其中,CPU是控制单元,负责执行指令;存储器用于存储程序和数据;IO端口用于与外部设备进行数据交互;定时器用于生成时间延迟。
三、AVR单片机的编程方法1. 安装开发环境:首先,需要安装一个开发环境,如Atmel Studio 等。
安装完成后,打开开发环境并创建一个新项目。
2.配置项目:在创建新项目后,需要配置项目的属性。
包括选择单片机型号、时钟频率等。
3.编写程序:使用C语言编写单片机程序。
可以通过调用库函数实现各种功能,如控制IO口、定时器等。
编写程序时,需要注意编码规范和注释。
4.编译程序:编写完程序后,需要将其编译成机器语言。
在开发环境中,可以通过点击编译按钮来完成编译。
5.烧录程序:将编译好的程序烧录到单片机中。
可以使用外部编程器或直接通过IDE进行烧录。
6.调试程序:将程序烧录到单片机后,可以进行调试。
可以通过添加断点、监视变量等方式来进行调试,以查找和修复错误。
四、AVR单片机的应用示例```c#include <avr/io.h>#include <avr/delay.h>void delayMs(uint16_t delay)while (delay--)_delay_ms(1);}int main(void)DDRA,=(1<<PA0);//将引脚PA0设置为输出while (1)PORTA,=(1<<PA0);//输出高电平delayMs(500); // 延时500msPORTA&=~(1<<PA0);//输出低电平delayMs(500); // 延时500ms}return 0;```以上示例代码实现了一个LED灯的闪烁,通过控制引脚PA0的电平状态来控制LED灯的亮灭。
AVR单片机C语言编程

输入输出端口的电压范围通常为0-5V。
输入输出端口的编程实例
• 以下是一个简单的AVR单片机输入输出端口的C语言编程示例
输入输出端口的编程实例
```c
int main(void)
输入输出端口的编程实例
{
DDRB |= (1 << DDB0); // 设置PB0为输出端口
串口发送数据
使用AVR单片机的发送缓冲寄存器,可以将数据发送到串口。
串口接收数据
使用AVR单片机的接收缓冲寄存器,可以接收来自串口的数据。
串口通信的扩展方法
扩展串口通信协议
根据实际需要,可以扩展串口通信协议,增加数据 传输的效率和可靠性。
多设备串口通信
通过多设备串口通信技术,可以实现多个设备之间 的数据传输和共享。
网络化串口通信
将串口通信与网络技术结合,可以实现远程控制和 数据传输。
06
AVR单片机的中断处理控 制
中断处理的工作原理
中断源
01
02
03
中断优先级
中断向量
AVR单片机具有多种中断源,包 括定时器/计数器中断、外部中 断、串行通信中断等。
多个中断同时发生时,需要根据 中断优先级来决定哪个中断先被 处理。
看门狗定时器控制
总结词
通过AVR单片机的C语言编程,可以实现看门狗定时器的控制。
详细描述
AVR单片机的看门狗定时器是一种用于系统恢复的机制。在C语言编程中,可 以使用内置的定时器/计数器或外部中断,实现对看门狗定时器的控制。
系统时钟设置控制
总结词
通过AVR单片机的C语言编程,可以实现对系统时钟 的设定和控制。
AVR单片机
由于ATmega8片内集成了UART,SPI,I2C等接口,该接口模块可利用这些接口与其他系统通信,使得该接口 模块成为通用的接口转换器。
AVR单片机AVR单片机硬件结构采取8位机与16位机的折中策略,即采用局部寄存器存堆(32个寄存器文件)和 单体高速输入/输出的方案(即输入捕获寄存器、输出比较匹配寄存器及相应控制逻辑)。提高了指令执行速度 (1Mips/MHz),克服了瓶颈现象,增强了功能;同时又减少了对外设管理的开销,相对简化了硬件结构,降低了 成本。
早期单片机主要由于工艺及设计水平不高、功耗高和抗干扰性能差等原因,所以采取稳妥方案:即采用较高 的分频系数对时钟分频,使得指令周期长,执行速度慢。以后的CMOS单片机虽然采用提高时钟频率和缩小分频系 数等措施,但这种状态并未被彻底改观(51以及51兼容)。此间虽有某些精简指令集单片机(RISC)问世,但依然沿 袭对时钟分频的作法。
该系统模块的控制核心是AVR高速单片机ATmega8。AVR单片机是新一代基于哈佛结构的高速RISC微控制器, 具有速度快、价格低、可靠性高,I/O口线驱动能力强和片内集成外设资源丰富等特点,其内部集成有可进行ISP 下载编程的Flash,EEPROM、熔丝位和锁定位。AVR单片机的ISP下载电缆制作简单、成本低廉,还有免费的下载 软件(例如PonyProg)支持。PDIUSBD12是一款高性价比USB接口器件,完全符合USB1.l规范,易于与各种微处 理器接口。
USB固件程序设计
本系统模块的USB固件程序采用符合ANSI C标准的GCC编译器设计,结合分层次的模块化结构,可移植性强, 只需稍微修改硬件接口层即可将其移植到别的硬件平台,可重复利用代码。USB固件程序设计是基于状态机和标 准的前后台式程序架构。首先编写硬件接口层hal.c和PDIUSBD12器件的命令接口层,以供上层模块调用。硬件接 口层含有对PDIUSBD12写指令和读写数据的函数,以供上层模块调用。当CPU不同时,只需修改这些函数即可。由 于CPU访问PDIUS-BD12与普通存储器一样,只需根据硬件连接关系,在硬件抽象层中编写对PDIUSBD12写指令、 写读数据的函数,供上层调用即可。实现PDIUSBD12的命令接口层需调用硬件抽象层函数,供上层模块调用。再 设计前后台程序及标准设备请求程序模块。
AVR单片机的库函数

AVR单片机的库函数目录:1. Character Type Functions -字符类型函数2. Standard C Input/Output Functions -标准输入输出函数3. Standard Library Functions -标准库和内存分配函数4. Mathematical Functions -数学函数5. String Functions -字符串函数6. BCD Conversion Functions - BCD 转换函数7. Memory Access Functions -存储器访问函数8. Delay Functions -延时函数9. LCD Functions - LCD函数10. LCD Functions for displays with 4x40 characters -4×40 字符型LCD函数11. LCD Functions for displays connected in 8 bit memory mapped mode -以8 位外部存储器模式接口的LCD显示函数12. I2C Bus Functions - I2C 总线函数13. National Semiconductor LM75 Temperature Sensor Functions - LM75 温度传感器函数14. Dallas Semiconductor DS1621 Thermometer/Thermostat Functions -DS1621 温度计函数15. Philips PCF8563 Real Time Clock Functions - PCF8563 实时时钟函数16. Philips PCF8583 Real Time Clock Functions - PCF8583 实时时钟函数17. Dallas Semiconductor DS1302 Real Time Clock Functions - DS1302 实时时钟函数18. Dallas Semiconductor DS1307 Real Time Clock Functions - DS1307 实时时钟函数19. 1 Wire Protocol Functions -单线通讯协议函数20. Dallas Semiconductor DS1820/DS1822 Temperature Sensors Functions -DS1820/1822温度传感器函数21. SPI Functions - SPI 函数22. Power Management Functions -电源管理函数23. Gray Code Conversion Functions -格雷码转换函数CodeVisionAVR C 库函数介绍-刘汧2前言:如果你要使用库函数,就必须用 #include 包含相应的头文件。
AVR单片机新手入门必看教程

详细描述
首先检查硬件连接,确认外设的电源和信号线是否正 确连接,以及信号线是否被正确地连接到单片机的相 应I/O口。其次,检查软件设置,包括单片机的I/O口 配置、外设的初始化参数等是否正确设置。最后,确 认外设本身是否正常工作,可以尝试更换外设或使用 外设的调试接口进行调试。
06
总结与展望
AVR单片机学习的收获与体会
AVR单片机的发展
随着AVR单片机的广泛应用,其发展历程中经历了多次升级 换代。从TinyAVR到megaAVR系列,再到32位AVR系列, AVR单片机不断向更高的性能和更丰富的外设接口方向发展 。
AVR单片机的应用场景
AVR单片机的应用领域
AVR单片机广泛应用于各种嵌入式系统中,如智能家居、智能仪表、工业控 制、消费电子、医疗器械等。它作为主控制器,负责协调和管理各个外设的 工作,从而实现整个系统的智能化和自动化。
掌握AVR单片机的基本原理、组成结构以及编程技术 。
熟悉常用的电子元件和电路设计,掌握基本的电路仿 真和调试方法。
学会使用C语言进行编程,了解嵌入式系统开发流程 和调试技巧。
了解嵌入式系统的应用场景和发展趋势,培养对嵌入 式系统开发的兴趣和热情。
AVR单片机未来的发展前景
AVR单片机的应用领域越来越广泛,例如智能家居、 物联网、机器人等。
AVR单片机的内部结构
AVR单片机主要包括CPU、存储器、I/O口、定时器/计数器、串口通信接口等模块。
AVR单片机的原理
AVR单片机的原理是通过对内部各个模块进行编程,实现对外部设备的控制,从而实现智 能化控制。
AVR单片机的编程语言及编译器
AVR单片机的编程语言
AVR单片机的编程语言主要有汇编语言和C语言,其中C语言使用较为广泛。
函数与编译预处理_AVR单片机(C语言)项目开发实践教程_[共2页]
![函数与编译预处理_AVR单片机(C语言)项目开发实践教程_[共2页]](https://img.taocdn.com/s3/m/948ad29de45c3b3566ec8bb9.png)
AVR单片机(C语言)项目开发实践教程五、函数与编译预处理1.函数C语言是由函数构成的,函数是C语言中模块化编程的最小单位,可以把每个函数看作一个模块,若干相关的函数可以合并为一个“模块”。
一个C语言程序由一个主函数和若干个函数组成,由主函数调用其他函数,其他函数之间也可以相互调用。
C语言的函数可以分为系统自带的函数和用户自己定义的函数。
系统自带的函数称为库函数,不需要用户编写,只要在程序中调用即可。
用户自定义函数需要由用户自己编写,用于解决用户的专门问题。
(1)函数的声明和定义。
函数的声明就是告诉编译器函数的名称、返回值类型和参数。
C 语言规定函数必须先声明才能使用。
其一般形式为:函数返回值类型函数名称(类型名形式参数1,类型名形式参数2,……);函数返回值类型可以是任何C语言个数据类型。
函数名称可以是任何C语言合法的标识符。
函数的形式参数在一个函数里必须唯一,在函数外可以重名。
如果函数不需要任何形式参数,则在形式参数说明部分使用void关键字。
函数声明之后必须定义其功能,函数定义的形式为:函数返回值类型函数名称(类型名形式参数1,类型名形式参数2,……){语句;┇return函数内部的某变量;}(2)函数的调用。
函数调用的一般形式为:函数名(实际参数1, 实际参数2,……);在函数调用时,实参列表的参数数据类型和参数个数必须与函数声明时的形式参数的数据类型和参数个数一致。
发生函数调用时,传递给函数的是实参的一个副本,实参本身不会改变。
如果需要传递给函数的参数在函数内部能够改变,则需要按照指针的方式传递给函数。
如果调用的是一个无参函数,则不用实参列表,但括号不能省略。
2.预处理预处理是C语言在编译程序之前对源程序的编译。
C语言的预处理功能有3种—宏定义、文件包括和条件编译。
(1)宏定义。
宏定义的作用是用指定的标识符代替一个字符串。
一般定义为:#define标识符字符串34。
AVR单片机基础知识
AVR单片机基础知识AVR单片机的特点:单片机按CPU的处理能力分类目前有4位、8位、16位、32位,位数越高的单片机在数据处理能力和指令系统方面就越强,AVR、51、PIC都属于8位机。
8位单片机也是目前应用最广泛的单片机,在各个领域上都可以看到它的身影。
AVR单片机是1997年由ATMEL公司研制开发的一种新型的8位单片机,AVR单片机分抵挡的ATtiny系列、中档的AT90S系列、高档的ATmega系列,本站推荐初学者选择学习的芯片型号是ATmega48/88/168或者ATmega16;不推荐使用中档的AT90S系列,因为它们都是比较早期的产品,现在它们早已经停产了。
AVR单片机全部型号(个别老型号除外)都支持ISP在线编程(烧写)、芯片可以反复擦写,这样学习AVR就变得非常的方便,设计者可以通过下载线直接在目标电路板上对芯片进行编程、调试,而不需要把芯片放在专用的编程器或者仿真器上烧写与调试。
51单片机也有一部分型号支持ISP在线编程,如AT89S51、AT89S52等。
PIC单片机也是部分支持ISP,但是它有很多型号是OPT 一次性烧写的,这些的确为难了广大初学者。
<二> AVR与51、PIC单片机相比具有一系列的优点,用通俗的说法主要体现在这几个方面:1、在相同的系统时钟下AVR运行速度最快;2、所有AVR单片机的FLASH、EEPROM蓄存器都可以反复烧写、支持在ISP在线编程(烧写),入门费用非常少;3、片内集成多种频率的RC振荡器、上电自动复位、看门狗、启动延时等功能,使得电路设计变得非常简单;4、每个IO口作输出时都可以输出很强的高、低电平,作输入时IO口可以是高阻抗或者带上拉电阻;5、片内具有丰富实用的资源,如AD模数器、DA数模器,丰富的中断源、SPI、USART、TWI通信口、PWM等等;6、片内采用了先进的数据加密技术,大大的提高了破解的难度;7、片内FLASH空间大、品种多,引脚少的有8脚,多的有64脚等各种封装8、部分芯片的引脚兼容51系列,代换容易,如ATtiny2313兼容AT89C2051,ATmega8515/162兼容AT89S51等<三> 开发AVR单片机的基本条件:1:下载线(烧写器/编程器)一个,常见的有“并口AVRISP下载线”和“AVRISP/STK500下载线”;2:下载线的控制软件一套;3:编译程序代码的开发软件一套(可以用C语言,也可以用汇编语言);4:试验板一块;5: 电脑一台。
avr单片机的总结

1、A VR单片机中断总结A VR单片机只是A TMEL公司推出的一款基于RISC指令构架的高性能、低功耗单片机。
ATmega16单片机具有21个中断源,如下表所示。
每一个中断源都有一个独立的中断向量作为中断服务程序的入口地址,而且所有的中断源都有自己独立的使能位。
如果全局中断IA VR单片机有3个外部中断,由引脚触发。
PB2(INT2),PD2(INT0)、PD3(INT1).。
需要注意:如果允许外部中断的话,即使是INT0,INT1、INT2这三个引脚都设为输出方式,外部中断也会触发。
INT0、INT1外部中断可以选择的触发方式有上升沿触发、下降沿触发以及低电平触发;INT2只有跳变沿触发,没有电平触发。
使用外部中断涉及到的寄存器有:MCU控制寄存器MCUCR,MCU控制欲寄存器MCUCSR,通用中断控制寄存器GICR,通用中断寄存器GIFR。
A VR单片机的中断响应时间最少为4个时钟周期。
在这4个时钟周期里,程序计数器PC的2字节自动入栈,而堆栈指针SP减2。
中断相关的寄存器:外部中断0触发方式选择6位—ISC2:外部中断2的触发方式,异步外部中断2由外部引脚INT2激发。
如果ISC2清零,则INT2的下降沿激活中断;如果ISC2置1,则INT2的上升沿激活中断。
INT2的边沿触发方式是异步的,只要INT2引脚上产生宽度超过50ns就会引起中断。
如果选择了低电平中断,则低电平必须保持到当前的指令完成才会产生中断。
而且只要引脚拉低,就会引发中断请求。
改变ISC2时有可能发生中断。
因此在寄存器GICR里清楚相应的中断使能位INT2,然后再改变ISC2,最后在重新使能中断之前,需要通过对GIFR寄存器的响应中断标志位INF2写“1”使其清零。
位7INT1:使能外部中断请求1.当INT1为1,且状态寄存器SREG的I标志置位的时候,相应的外部引脚中断使能。
MCU通用控制寄存器MCUCR的中断敏感电平控制ISC11和ISC10决定中断是由上升沿、下降沿、还是INT1电平触发的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Syany绘图库使用方法方法1:作为系统库使用要使用绘图库要按照上述说明正确包含本书提供的库文件.将libgraph.h 复制到Winavr目录的\avr\include目录libgraph.a复制到Winavr目录的\avr\lib\ 目录在文件头部包含graph.h#include <graph.h>使用A VRX系统的makefile的修改修改两处在makefile增加一句加亮显示为库文件所在的目录# Define directories, if needed.DIRA VR = f:/Soft/Mcu/winavr 设置WINA VR的安装目录DIRA VRBIN = $(DIRA VR)/binDIRA VRUTILS = $(DIRA VR)/utils/binDIRINC = .DIRLIB = $(DIRA VR)/avr/libGRAPHLIB = $(DIRA VR)/avr/lib/graph.a 增加一句加亮显示为库文件所在的目录# Define programs and commands.SHELL = sh加亮为增加的部分%.elf: $(OBJ)@echo@echo $(MSG_LINKING) $@$(CC) $(ALL_CFLAGS) $(OBJ) $(GCCLIB) $(GRAPHLIB) --output $@ $(LDFLAGS) 修改完就可以和A VRX编译在一起生成可执行文件了。
正常C程序编译Makefile的修改方法2:把将graph.h 和graph.a复制到您所开发文件所在的目录,修改的唯一不同之处是GRAPHLIB =graph.a 此处就不需要给出文件的位置了。
其余的修改和上面相同。
修改完就可以和A VRX编译在一起生成可执行文件了。
不使用AVRX系统的使用方法把将graph.h 和graph.a复制到您所开发文件所在的目录在主文件头部包含#include“graph.h”用Mfile生成您系统所需的Makefile,然后增加下面所示的内容。
GRAPHLIB = graph.a 增加的内容#---------------- Linker Options ----------------# -Wl,...: tell GCC to pass this to linker.# -Map: create map file# --cref: add cross reference to map fileLDFLAGS = -Wl,-Map=$(TARGET).map,--crefLDFLAGS += $(EXTMEMOPTS)LDFLAGS += $(PRINTF_LIB) $(SCANF_LIB) $(GRAPHLIB) $(MATH_LIB)编译即可。
绘图库说明Syany 绘图库是作者在大学时的业余之作,用于A VRAtmega64以上的单片机的用于对单色液晶屏使用的绘图库,提供了常用的绘图函数,绘图库具有代码量小,执行速度快。
绘图库使用C语言开发,绘图函数不涉及到任何液晶屏硬件的信息,本绘图库适用于任何单色图形点阵的液晶屏的绘图操作。
绘图库使用图形缓冲技术,绘图操作全部在内存中执行,然后用户需要编写相应的液晶屏驱动程序,将绘图缓冲的内容写入到液晶屏,即可完成对液晶屏的绘图的操作。
这样做的好处时绘图库不受液晶屏型号和指令的限制,只要液晶屏能和AVR单片机接口,就可以使用本绘图库进行复杂的图形显示。
这样设计唯一的缺点是占用了宝贵的内存空间。
但是现在的A VR单片机内存都比较大,完全可以胜任较大内存的一些需求。
有了绘图库的支持,任何设计计中使用单色液晶屏的绘图操作的实现提供了强大的后台支持,也大大的缩短了复杂界面的开发时间。
绘图库缓冲大小的计算,本绘图库针对单色图形点阵液晶屏而设计,因此液晶屏上的每一点只有两种状态:点亮和熄灭。
用二进制亮用1表示,灭用0表示,这样液晶屏上的一个点(像素)对应图形缓冲中的一个位。
每8个位组成一个字节。
液晶屏显示区域的总像素为液晶屏横向的点数与液晶屏纵向的点数的乘积,需要缓冲的总字节数为总像素除以8。
缓冲区的定义为一个二维数组,定义为SBuffer [液晶屏的横向点数÷8][液晶屏纵向的行数]。
绘图库的原点(0,0)坐标为SBuffer [0字节的最高位][0],按顺序写入液晶屏后0相当于液晶屏的左上角。
缓冲的示意图如下N=液晶屏横向点数÷8;M=液晶屏纵向的行数.缓冲区大小的定义如下#define BufferXSize 128L#define BufferYSize 64LBufferXSize 为液晶屏横向点数定义,BufferYSize 为液晶屏纵向的行数定义. 如果需要修改缓冲取的大小,只需要修改这两个定义即可。
缓冲二维数组的定义会根据此定义自动计算得出。
缓冲区的宽度必须是8的整数倍,不足8点的移8计算.屏幕的长度没有限制,根据实际的LCD 大小定义,本库测试环境的大小为128*64,在此情况下缓冲占用内存为128*64/8=1024字节。
ATmega128单片机为4K 字节内存,此大小的液晶屏也是最小系统的最佳配比。
绘图库函数定义和说明unsigned char screen_buffer[buffer_column_z][buffer_lines_z];定义LCD 缓冲所需要的二维数组,数组的大小由定义的Lcd 长宽大小确定,这里不需要修改void ScreenrClr(unsigned char RevClr);该函数的功能是清除缓冲区 有2个参数可选RevClr :参数传递0的时候清空缓冲区域全部置为0RevClr :参数传递1的时候清空缓冲区域全部置为1RevClr: 其它参数无效,不要使用void Pixel(int BX,int BY,unsigned char Fill);缓冲区绘点函数,以缓冲区域的实际坐标计算,不在定义缓冲区范围内的时候不执行任何操作,对行列坐标确定的点(位)进行如下操作x_xx :横坐标 y_yy :纵坐标Fill:画点模式:0将该点置为0 (相当于清点);1将该点置为1 (相当于画点);2将该点取反;其它参数无效,不要使用void MoveLeft(int StartX,int StartY ,int EndX,int EndY ,unsigned char Fill);限定区域向左移动1列,将起始坐标所确定的矩形区域的内容向左移动一列,移动动后形成……… M 列一列空缺,填充模式由Fill确定。
当Fill为0时以0填充,当为1时以1填充,当为2时循环填充,该函数配合其它函数可以实现字幕的效果。
起始坐标和结束坐标之差要大于等于8(end_x-start_x must >= 8)void MoveRight(int StartX,int StartY,int EndX,int EndY,unsigned char Fill);限定区域向右移动1列,使用方法同上void MoveUp(int StartX,int StartY,int EndX,int EndY,unsigned char Fill);限定区域向上移动1列,使用方法同上void MoveDown(int StartX,int StartY,int EndX,int EndY,unsigned char Fill);限定区域向下移动1列,使用方法同上(注意:此版本的绘图库,向上和向下移动一列函数,规定区域内的两边不能有数据)//---------整屏向上移动16点------------------------void MoveUpLines16(void);//---------整屏向上移动8点------------------------void MoveUpLines8(void);void BLoadP(int StartX,int StartY,int PX,int PY,const prog_void *TableP,char Fill);载入存储在程序区任意大小图片(图片要转换成数组)程序(数组必须为8的整数倍,并且宽度要大等于于8),此函数是绘图库的核心函数。
缓冲的原点(0,0)为左上角,StartX, StartY 取值范围-32768~32767当超出定义缓冲定义的大小时不进行载入不操作,只载入屏幕区域内的数据。
StartX, StartY为载入图片的起始坐标;PX, PY,为图片的大小尺寸,以点计算。
* TableP为存储图片数组的名称。
Fill 载入模式选择,目前版本只能为1,其它参数不要使用。
PX 图片宽度的数值,允许非8的整数倍,但是图片转换的数据必须为8的整数倍,picturt_x 当为非8的整数倍时,只载入区域内的数据;picturt_y没有限制。
void LimitReverse(int StartX,int StartY,int EndX,int EndY);规定区域取反函数,将起始坐标和结束座标所确定的矩形区域内的多对应的位取反(相当于反色,一般用于菜单的高亮显示。
void Line(int StartX,int StartY,int EndX,int EndY,char Fill);画线函数,将起始坐标StartX, StartY和结束坐标EndX, EndY,确定的两点坐标以直线连接,起始坐标和结束坐标没有先后顺序,每个参数取值范围可定义的缓冲范围之外,超出缓冲定义范围的不进行操作。
例如:点(-50,-10)到点(5,5)画线。
Fill画线模式选择:0清线,1划线,2取反void Trigon(int XA,int Y A,int XB,int YB,int XC,int YC,char Fill);//Fill 0清,1划,2取反--------画三角形,将3点坐标确定的三条直线连成三角形,3点顺序没有先后draw_clr绘图模式选择同上。
此函数相当于调用3此画线函数。
void Box(int StartX,int StartY,int EndX,int EndY,char DM,char Fill);画矩形函数,画出以起始坐标和结束座标所确定的矩形,draw_clr绘图模式模式:0清除所确定的矩形,1绘制所确定的矩形,2将所确定的矩形边上的点取反,其它参数无效,不要使用。
Fill填充模式:0不填充,1填充,2网格填充(网格只有填充模式没有绘图模式)void Circle(int CX,int CY,int CR,char Fill);绘制圆形圆函数,start_x,start_y为圆心的坐标位置,范围任意。