Open loop dynamic control of parts moving on an intelligent motion surface along paths comp
单片机常用英文缩写全称
MCS-51 指令(1)数据传送类指令( 7 种助记符)助记符英文注释功能SFR 的数据进行传送MOV Move 对内部数据寄存器 RAM 和特殊功能寄存器 MOVC Move Code 读取程序存储器数据表格的数据传送MOVX Move External RAM 对外部 RAM 的数据传送XCH Exchange 字节交换XCHD Exchange low-order Digit 低半字节交换 PUSH Push onto Stack)入栈POP Pop from Stack)出栈(2)算术运算类指令( 8 种助记符)ADD Addition 加法ADDC Add with Carry 带进位加法SUBB Subtract with Borrow 带借位减法 DA Decimal Adjust 十进制调整 INC Increment 加 1 DEC Decrement 减 1 MUL Multiplication 、 Multiply 乘法DIV Division 、 Divide 除法(3)逻辑运算类指令( 10 种助记符) ANL And Logic 逻辑与 ORL OR Logic 逻辑或XRL Exclusive-OR Logic 逻辑异或CLR Clear 清零CPL Complement 取反 RL Rotate left 循环左移RLC Rotate Left throught the Carry flag 带进位循环左移RR Rotate Right 循环右移RRC Rotate Right throught the Carry flag 带进位循环右移 SWAP Swap 低 4 位与高 4 位交换(4)控制转移类指令( 17 种助记符)ACALL Absolute subroutine Call 子程序绝对调用 LCALL Long subroutine Call 子程序长调用RET Return from subroutine 子程序返回 RETI Return from Interruption 中断返回JMP Jump IndirectSJMP Short Jump 短转移 AJMP Absolute Jump 绝对转移 LJMP Long Jump 长转移CJNE Compare and Jump if Not Equal 比较不相等则转移DJNZ Decreme nt and Jump if Not Zero 减1后不为0则转移 JZ Jump if Zero 结果为0则转移JNZ Jump if Not Zero 结果不为0则转移 JC Jump if the Carry flag is set 有进位则转移JNC Jump if Not Carry 无进位则转移JB Jump if the Bit is set) B 位为1则转移JNB Jump if the Bit is Not set B 位为 0 则转移JBC Jump if the Bit is set and Clear the bit 位为1则转移,并清除该位NOP No Operation 空操作(5) 位操作指令( 1 种助记符)SETB Set Bit 置位伪指令助记符 英文注释 功能ORG OriginDB Define ByteDW Define WordEQU EqualDATA DataXDATA External DataBIT BitEND End51 外部引脚 缩写 英文解释 中文解释RST (9) Reset 复位信号引脚Receive Data 串口接收端 Transmit Data 串口发送端12--P3.2)Interrupt0 外部中断 0 信号输入引脚 13- -P3.3)Interrupt1 外部中断 1 信号输入引脚 Timer0 定时/计数器 0 输入信号引脚 Timer1 定时 /计数器 1 输入信号引脚 WR( ——— ) (16--P3.6) write 写信号引脚 RD( ——— )(17--P3.7) read 读信号引脚 PSEN(————— ) ( 29)progammer saving enable 外部程序存储器读选通信号 ALE (30) Address Latch Enable 地址锁存允许信号EA( ---- )(31) enable 外部ROM 选择信号 51 内部寄存器SFR special funtion register 特殊功能寄存器 ACC accumulate 累加器 APSW progammer status word 程序状态字CY (PSW.7) carry 进位标志位AC (PSW.6) assistant carry 辅助进位标志位OV (PSW.2) overflow 溢出标志位PC progammer counter 程序计数器DPTR data point register 数据指针寄存器RxD(10--P3.0) TxD (11--P3.1) INT0( ———— ) INT1( ———— )T0(14--P3.4) T1(15--P3.5)SP stack point 堆栈指针TCON timer control 定时器控制寄存器TF1 ( TCON.7 ) Timer1 flag T1 中断标志位TR1 (TCON.6 ) Timer1 Run T1 运行控制位TF0 ( TCON.5 ) Timer0 flag T0 中断标志位TR0 (TCON.4 ) Timer0 Run T0 运行控制位IE1 (TCON.3 ) Interrupt1 exterior 外部中断 1 中断标志位IT1 ( TCON.2 ) Interrupt1 touch 外部中断 1 触发方式选择位IE0 (TCON.1 ) Interrupt0 exterior 外部中断 0 中断标志位IT0 (TCON.0 ) Interrupt0 touch 0-电平触发 1-下降沿触发IE ( A8H ) interrupt enable 中断允许寄存器EA (IE.7) enable all interrupt 中断总允许位ES (IE.4) enable serial 串行口中断允许位ET1 ( IE.3 ) enable timer 1 T1 中断允许位EX1 ( IE.2) enable exterior1 外部中断 1 中断允许位ET0 ( IE.1 ) enable timer 0 T0 中断允许位EX0 ( IE.0) enable exterior0 外部中断 0 中断允许位IP ( B8H ) interrupt priority 中断优先级寄存器PS (IP.4) priority serial 串口优先级标志位PT1 (IP.3) priority timer 1 定时器 1 优先级标志位PX1 (IP.2) priorityexterior 1 外部中断 1 优先级标志位PT0 (IP.1) priority timer 0 定时器 0 优先级标志位PX0 (IP.0) priorityexterior 0 外部中断 0 优先级标志位PCON (87H) power control 电源控制和波特率选择TMOD (89H) timer mode 定时器方式控制寄存器MSB = most significant bit// 最高有效位LSB = last significant bit// 最低有效位OE = output enable // 输出使能AC(alternating current) 交流 (电) tnHh F ( qA /D(analog to digital) 模拟/数字转换"6o T BADC(analog to digital convertor) 模拟/数字转换器GCu[- Z8NDNADM(adaptive delta modulation) 自适应增量调制lO- 6 kCADPCM(adaptive differential pulse code modulation) 自适应差分脉冲编码调制ALU(arithmetic logic unit) 算术逻辑单元dgjd,ikASCII(American standard code for information )F y *&-interchange) 美国信息交换标准码jk8y :J M(AV(audio visual) 声视,视听c-, ( ,$t kBCD(b in ary coded decimal)二进制编码的十进制数…BCR(bi-directional controlled rectifier) 双向晶闸管ZPoLm__ BBCR(buffer courtier reset) 缓冲计数器l@! <& |BZ(buzzer) 蜂鸣器,蜂音器ZB8 nd c+C(capacitance,capacitor) 电容量,电容器9 |0 :~'UyCATV(cable television)电缆电视?CCD(charge-coupled device) 电荷耦合器件 d AU- sD CCTV(closed-circuit television) 闭路电视.3 {qmj&Y I CMOS(complementary) 互补 MOS jd "1 SQCPU(central processing unit)** 处理单元-CS(control signal) 控制信号jf 7=t,: -wD(diode) 二极管? wj ? -/DAST(direct analog store technology) 直接模拟存储技术xp e- i&>,!DC(direct current) 直流;v<Leet 'qDIP(dual in-line package) 双列直插封装- I S%E_ -DP(dial pulse) 拨号脉冲Z y6#!i#yDRAM(dynamic random access memory) 动态随机存储器4;%[{t* s DTL(diode-transistor logic) 二极管晶体管逻辑#A0aq -&IxDUT(device under test) 被测器件bi Q>D DVM(digital voltmeter) 数字电压表… ECG(electrocardiograph) 心电图9y EjG }F!ECL(emitter coupled logic) 射极耦合逻辑&6 / uChD lEDI(electronic data interchange) 电子数据交换@! ?hC&f1 EIA(Electronic Industries Association) 电子工业联合会iS~o 6 ,d EOC(end of conversion) 转换结束B] #& Y ; ]EPROM(erasable programmable read only memory) 可擦可编程只读存储器 EEPROM(electrically EPROM) 电可擦可编程只读存储器-X #5O[ESD(electro-static discharge) 静电放电RW~fIv,/ -FET(field-effect transistor) 场效应晶体管P$ P0D cFS(full scale) 满量程NF. PV-3*e6F/V(frequency to voltage convertor) 频率/电压转换 FM(frequency modulation) 调频CBRbc5+TrFSK(frequency shift keying) 频移键控FSM(field strength meter) 场强计"sZw* W S &Q FST(fast switching shyster) 快速晶闸管7 %wlX S >eFT(fixed time) 固定时间ey -xkRFU(fuse unit) 保险丝装置b$Oo 1} zFWD(forward) 正向的GAL(generic array logic)通用阵列逻辑-GND(ground)接地,地线• %GTO(Sate turn off thruster) 门极可关断晶体管sR:-Yi*jW\HART(highway addressable remote transducer) 可寻址远程传感器数据公路 HCMOS(high density COMS)高密度互补金属氧化物半导体(器件)… HF(high frequency) 高频bh~ -MHaa kHTL(high threshold logic) 高阈值逻辑电路\y =JHTS(heat temperature sensor)热温度传感器- IC(integrated circuit) 集成电路x h .ID(international data) 国际数据 IGBT(insulated gate bipolar transistor) 绝缘栅双极型晶体管LM ] VH %M IGFET(insulated gate field effect transistor)绝缘栅场效应晶体管-I/O(input/output)输入/输岀-I /V(current to voltage convertor)电流-电压变换器「一IPM(incidental phase modulation) 附带的相位调制L uEF IPM(intelligent power module) 智能功率模块%<$ %YsC]' IR(infrared radiation) 红外辐射{Ns Z gZ7 IRQ(interrupt request)中断请求-JFET(junction field effect transistor)结型场效应晶体管•LAS(light activated switch) 光敏开关"?qn tq7LASCS(light activated silico n con trolled switch) 光控可控硅开关•> LCD(liquid crystal display) 液晶显示器Mh=3 "V ]A1LDR(light dependent resistor) 光敏电阻(t %.(VLED(light emitting diode) 发光二极管<Y[3C:; (LRC(longitudinal redundancy check) 纵向冗余 (码)校验--D [2u C|:LSB(least significant bit)最低有效位LSI(1arge scale integration) 大规模集成电路X*t@ [v'#M(motor) 电动机MCT(MOS controlled gyrator) 场控晶闸管& p @ }gaMIC(microphone) 话筒,微音器,麦克风3=n&)([ Nqmin(minute)分•MOS(metal oxide semiconductor)金属氧化物半导体-MOSFET(metal oxide semiconductor FET) 金属氧化物半导体场效应晶体管 N(negative)负NMOS(N-channel metal oxide semiconductor FET) N 沟道MOSFET \ oVPVN-B NTC(negative temperature coefficient) 负温度系数X C/W/9OC(over current) 过电流OCB(overload circuit breaker) 过载断路器OCS(optical communication system) 光通讯系统} VR oN <hOR(type of logic circuit) 或逻辑电路Cm N~ rr LOV(over voltage) 过电压kzVu4a,]P(pressure) 压力FAM(pulse amplitude modulation) 脉冲幅度调制9Vtm6l $;v zPC(pulse code) 脉冲码QR%) 7D4HPCM(pulse code modulation)脉冲编码调制-PDM(pulse duration modulation) 脉冲宽度调制- * | @ :HPF(power factor) 功率因数Y[ 7oA8 67 EPFM(pulse frequency modulation) 脉冲频率调制NR Y n +PG(pulse gen erator)脉冲发生器-PGM(programmable) 编程信号J l@i A-sPI(proportional-integral(controller)) 比例积分(控制器)…PID(proportional-integral-differential(controller)) 比例积分微分 ( 控制器 ) PIN(positiveintrinsic-negative) 光电二极管%A >M:S )/ 2PIO(parallel input output) 并行输入输岀 5 s3J<{j]p PLD(phase-locked detector) 同相检波O :sgpYn -PLD(phase-locked discriminator) 锁相解调器1J ( >I [PLL(phase-locked loop) 锁相环路{A+dFw F iYnPMOS(P-channel metal oxide semiconductor FET) P 沟道 MOSFET P-P(peak-to-peak) 峰-- 峰+:@$ z] ,dPPM(pulse phase modulation) 脉冲相位洲制[ dw F$Y PRD(piezoelectric radiation detector) 热电辐射控测器BaEX !w PROM(programmable read only memory) 可编只读程存储器 PRT(platinum resistance thermometer) 铂电阻温度计PRT(pulse recurrent time)脉冲周期时间-PUT(programmable unijunction transistor) 可编程单结晶体管EbiCt PWM(pulse width modulation) 脉宽调制/QlZ %|XR(resistance,resistor) 电阻,电阻器JN/ CvmWRRAM(random access memory) 随机存储器/Ml( P4~i NRCT(reverse conducting thyristor) 逆导晶闸管hO xoraREF(reference) 参考,基准J / LIG ZFoREV(reverse)反转R/F(radio frequency) 射频jnl (X 9-rh RGB(red/green/blue) 红绿蓝w"aGP _w ROM(read only memory) 只读存储器f z - Eh( N RP(resistance potentiometer) 电位器gyKs /_ 3 RST(reset) 复位信号b5b *C{eqJRT(resistor with in here nt variability depe ndent) 热敏电阻一 RTD(resistance temperature detector) 电阻温度传感器6]r, \5 RTL(resistor transistor logic) 电阻晶体管逻辑(电路) 6TW 2 s$0+ RV(resistor with inherent variability dependent on the a 8?# voltage) 压敏电阻器,] x<5#Z SA( switching assembly) 开关组件SBS(silicon bi-directional switch) 硅双向开关,双向硅开关c6 c[ sYU!SCR(silicon controlled rectifier) 可控硅整流器w-.{ S 7i ESCS(safety control switch) 安全控制开关|GhWf: (SCS(silicon controlled switch) 可控硅开关#e&/ yDYpYSCS(speed control system) 速度控制系统}ed /N-=SCS(supply control system) 电源控制系统S 5 2} JoRSG(spark gap) 放电器XM- dAVm. 8SIT(static in duction tran sformer)静电感应晶体管-SITH(static induction thyristor) 静电感应晶闸管s J B .]SP(shift pulse) 移位脉冲w S nT] ]#ASPI(serial peripheral interface) 串行外围接口 B o&+@ ]SR(sample realy,saturable reactor) 取样继电器,饱和电抗器p -V7 )"nSR(silicon rectifier) 硅整流器 E " 6K}SRAM(static random access memory) 静态随机存储器TADw@ cX SSR(solid-state relay)固体继电器-SSR(switching select repeater) 中断器开关选择器"X?,MWn / SSS(silicon symmetrical switch) 硅对称开关,双向可控硅- ?1 bPnru SSW(synchro-switch) 同步开关=cMw M@Z~zST(start)启动…ST(starter)启动器• •STB(strobe)闸门,选通脉冲-T(transistor)晶体管,晶闸管…TACH(tachometer)转速计,转速表TP(temperature probe)温度传感器-TRIAC(triodes AC switch)三极管交流开关TTL(transistor-transistor logic)晶体管一晶体管逻辑TV(televisi on)电视•UART(universal asynchronous receiver transmitter) 通用异步收发器•••VCO(voltage con trolled oscillator)压控振荡器 -VD(video decoders)视频译码器-VDR(voltage dependent resistor)压敏电阻VF(video frequency)视频*V/ F(voltage-to-frequency)电压/频率转换V/ I(voltage to current convertor)电压-电流变换器■?VM(voltmeter)电压表-VS(vacuum switch)电子开关•VT(visual telephone)电视电话-VT(video terminal)视频终端51系列单片机的中斷系统如圏组2所示口它由屮断源、中断标志位、中斷控制位、W 件査询机构组成口其中*中斷源、个.叩外部中断0(而定时器/计数器中斷Q(T/C0)> 外部中斷1(而h定时器小数掘中断1CT/C1).串行口中BKTXD. RXD);外部中斷触发方戌控制位2个,CPITO. IT1,中断标志位6个,即IEO、TFO. IE1, TF1, TI、RJ:'I' 斷控制总开关位1个,叩EA*中断控制分开关隹5个,HP EXO. ETO、EXL ETE ES:中斷控制忧先级位5个* UIJ PXO. PTO. PX1. PTK PS.T J CI. KJXi 1T9-1蓦堰#前上口图4.2 51系列单片机的中断系统TF3沮%•:TA总线:指能为多个部件服务的信息传送线,在微机系统中各个部件通过总线相互通信。
LT8637 42V, 5A Synchronous Step-Down Silent Switch
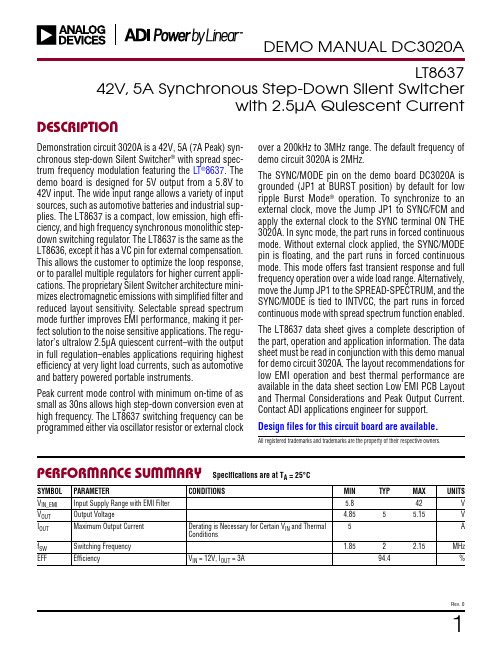
1Rev. 0DESCRIPTIONLT863742V, 5A Synchronous Step-Down Silent Switcherwith 2.5μA Quiescent CurrentDemonstration circuit 3020A is a 42V, 5A (7A Peak) syn-chronous step-down Silent Switcher ® with spread spec-trum frequency modulation featuring the L T ®8637. The demo board is designed for 5V output from a 5.8V to 42V input. The wide input range allows a variety of input sources, such as automotive batteries and industrial sup-plies. The LT8637 is a compact, low emission, high effi-ciency, and high frequency synchronous monolithic step-down switching regulator . The LT8637 is the same as the LT8636, except it has a VC pin for external compensation. This allows the customer to optimize the loop response, or to parallel multiple regulators for higher current appli-cations. The proprietary Silent Switcher architecture mini-mizes electromagnetic emissions with simplified filter and reduced layout sensitivity. Selectable spread spectrum mode further improves EMI performance, making it per-fect solution to the noise sensitive applications. The regu-lator’s ultralow 2.5μA quiescent current–with the output in full regulation–enables applications requiring highest efficiency at very light load currents, such as automotive and battery powered portable instruments.Peak current mode control with minimum on-time of as small as 30ns allows high step-down conversion even at high frequency. The LT8637 switching frequency can be programmed either via oscillator resistor or external clockAll registered trademarks and trademarks are the property of their respective owners.PERFORMANCE SUMMARYover a 200kHz to 3MHz range. The default frequency of demo circuit 3020A is 2MHz.The SYNC/MODE pin on the demo board DC3020A is grounded (JP1 at BURST position) by default for low ripple Burst Mode ® operation. To synchronize to an external clock, move the Jump JP1 to SYNC/FCM and apply the external clock to the SYNC terminal ON THE 3020A. In sync mode, the part runs in forced continuous mode. Without external clock applied, the SYNC/MODE pin is floating, and the part runs in forced continuous mode. This mode offers fast transient response and full frequency operation over a wide load range. Alternatively, move the Jump JP1 to the SPREAD-SPECTRUM, and the SYNC/MODE is tied to INTVCC, the part runs in forced continuous mode with spread spectrum function enabled. The LT8637 data sheet gives a complete description of the part, operation and application information. The data sheet must be read in conjunction with this demo manual for demo circuit 3020A. The layout recommendations for low EMI operation and best thermal performance are available in the data sheet section Low EMI PCB Layout and Thermal Considerations and Peak Output Current. Contact ADI applications engineer for support.Design files for this circuit board are available .Specifications are at T A = 25°CSYMBOL PARAMETERCONDITIONSMIN TYPMAX UNITSV IN_EMI Input Supply Range with EMI Filter 5.842V V OUT Output Voltage4.855 5.15V I OUT Maximum Output Current Derating is Necessary for Certain V IN and Thermal Conditions 5Af SW Switching Frequency 1.852 2.15MHz EFFEfficiencyV IN = 12V, I OUT = 3A94.4%QUICK START PROCEDUREDemonstration circuit 3020A is easy to set up to evalu-ate the performance of the LT8637. Refer to Figure 1 for proper measurement equipment setup and follow the procedure below:NOTE: When measuring the input or output voltage ripple, care must be taken to avoid a long ground lead on the oscilloscope probe. Measure the output voltage ripple by touching the probe tip directly across the output capacitor.1. Make sure the Jump JP1 is on the BURST position. Refer to the schematic.2. With power off, connect the DC power supply to VEMI and GND. Connect the load from VOUT to GND.3. Connect the voltage meter across the VIN_SENSE and GND for V IN measurement, and VOUT_SENSE and GND for V OUT measurement.4. Turn on the power at the input.NOTE: Make sure that the input voltage does not exceed 42V.5. Check for the proper output voltage (V OUT = 5V). NOTE: If there is no output, temporarily disconnect theload to make sure that the load is not set too high or is shorted.6. Once the proper output voltage is established, adjust the load within the operating ranges and observe the output voltage regulation, ripple voltage, efficiency and other parameters. For efficiency measurement, use the VIN_SENSE, GND, and VOUT_SENSE, GND accordingly.7. An external clock can be added to the SYNC terminal when SYNC function is used (JP1 on the SYNC position). When JP1 is in SYNC, and no external clock is connected to the SYNC terminal of the board, the SYNC/FCM pin is floating, and the LT8637 runs in forced continuous mode. JP1 can also set LT8637 in spread spectrum mode (JP1 on the SPREAD-SPECTRUM position).Figure 1. Proper Measurement Equipment Setup2Rev. 0QUICK START PROCEDUREEfficiency, 12V IN, FCMFigure 2. Efficiency vs Load Current, 12V IN, V OUT = 5VCISPR25 Radiated Emission Test with Class 5 Average LimitsFigure 3. Radiated Emission Test with CISPR 25, Average Limit, SS Mode. V IN = 14V, I OUT = 5A, V OUT = 5V3Rev. 0PARTS LISTITEM QTY REFERENCE PART DESCRIPTION MANUFACTURER/PART NUMBERRequired Circuit Components11C1CAP., 22µF, ALUM. ELECT., 63V, 20%, 6.3mm × 7.7mm, CE-BS SUN ELECTRONIC INDUSTRIES CORP, 63CE22BS 23C2, C10, C11CAP., 10µF, X7R, 50V, 10%, 1210, NO SUBS. ALLOWED MURATA, GRM32ER71H106KA12L32C3, C4CAP., 1µF, X5R, 50V, 10%, 0603AVX, 06035D105KAT2A41C5CAP., 0.1µF, X7R, 16V, 10%, 0603WURTH ELEKTRONIK, 885012206046 51C6CAP., 10pF, X7R, 50V, 10%, 0603AVX, 06035C100KAT2A61C7CAP., 100µF, X5R, 6.3V, 10%, 1206MURATA, GRM31CR60J107KE39L72C8, C16CAP., 1µF, X7R, 10V, 10%, 0603AVX, 0603ZC105KAT2A83C12, C13, C15CAP., 0.1µF, X7R, 50V, 10%, 0402AVX, 04025C104KAT2A91C17CAP., 560pF, C0G, 50V, 5%, 0603AVX, 06035A561JAT2A101C18CAP., 68pF, C0G, 50V, 5%, 0603AVX, 06035A680JAT2A111FB1IND., 30Ω AT 100MHz, FERRITE BEAD, 25%, 5A, 10mΩ, 0603TDK, MPZ1608S300ATAH0121L1IND., 2.2µH, 20%, 18.1A, 6.70mΩ, 6.56mm × 6.36mm,COILCRAFT, XEL6060-222MEBXEL6060, AEC-Q200131L2IND., 0.33µH, 20%, 19.2A, 3.52mΩCOILCRAFT, XAL5030-331MEB142R1, R4RES., 100k, 1%, 1/10W, 0603, AEC-Q200VISHAY, CRCW0603100KFKEA151R2RES., 17.8k, 1%, 1/10W, 0603, AEC-Q200NIC, NRC06F1782TRF161R3RES., 243k, 1%, 1/10W, 0603VISHAY, CRCW0603243KFKEA171R6RES., 1M, 1%, 1/10W, 0603, AEC-Q200VISHAY, CRCW06031M00FKEA181R7RES., 0Ω, 1/10W, 0603, AEC-Q200VISHAY, CRCW06030000Z0EA191R9RES., 8.06k, 1%, 1/10W, 0603YAGEO, RC0603FR-078K06L201U1IC, SYN. STEP-DOWN Silent Switcher, LQFN-20, 42V, 5A/7A ANALOG DEVICES, LT8637EV#PBF Additional Demo Board Circuit Components10R8RES., OPTION, 0603Hardware: For Demo Board Only14E2, E9, E11, E12TEST POINT, TURRET, 0.064" MTG. HOLE, PCB 0.062" THK MILL-MAX, 2308-2-00-80-00-00-07-0 26E4-E8, E10TEST POINT, TURRET, 0.094" MTG. HOLE, PCB 0.062" THK MILL-MAX, 2501-2-00-80-00-00-07-0KEYSTONE, 575-4 34J1-J4CONN., BANANA JACK, FEMALE, THT, NON-INSULATED,SWAGE, 0.218"41JP1CONN., HDR., MALE, 2 × 3, 2mm, VERT, STR, THT WURTH ELEKTRONIK, 6200062112154MH1-MH4STANDOFF, NYLON, SNAP-ON, 0.50"WURTH ELEKTRONIK, 70293500061XJP1CONN., SHUNT, FEMALE, 2-POS, 2mm SAMTEC, 2SN-BK-G4Rev. 05Rev. 0Information furnished by Analog Devices is believed to be accurate and reliable. However , no responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other rights of third parties that may result from its use. Specifications subject to change without notice. No license is granted by implication or otherwise under any patent or patent rights of Analog Devices.SCHEMATIC DIAGRAMP h o n e : (4086Rev. 0ANALOG DEVICES, INC. 202103/21ESD CautionESD (electrostatic discharge) sensitive device. Charged devices and circuit boards can discharge without detection. Although this product features patented or proprietary protection circuitry, damage may occur on devices subjected to high energy ESD. Therefore, proper ESD precautions should be taken to avoid performance degradation or loss of functionality.Legal Terms and ConditionsBy using the evaluation board discussed herein (together with any tools, components documentation or support materials, the “Evaluation Board”), you are agreeing to be bound by the terms and conditions set forth below (“Agreement”) unless you have purchased the Evaluation Board, in which case the Analog Devices Standard Terms and Conditions of Sale shall govern. Do not use the Evaluation Board until you have read and agreed to the Agreement. Your use of the Evaluation Board shall signify your acceptance of the Agreement. This Agreement is made by and between you (“Customer”) and Analog Devices, Inc. (“ADI”), with its principal place of business at One Technology Way, Norwood, MA 02062, USA. Subject to the terms and conditions of the Agreement, ADI hereby grants to Customer a free, limited, personal, temporary, non-exclusive, non-sublicensable, non-transferable license to use the Evaluation Board FOR EVALUATION PURPOSES ONL Y. Customer understands and agrees that the Evaluation Board is provided for the sole and exclusive purpose referenced above, and agrees not to use the Evaluation Board for any other purpose. Furthermore, the license granted is expressly made subject to the following additional limitations: Customer shall not (i) rent, lease, display, sell, transfer , assign, sublicense, or distribute the Evaluation Board; and (ii) permit any Third Party to access the Evaluation Board. As used herein, the term “Third Party” includes any entity other than ADI, Customer , their employees, affiliates and in-house consultants. The Evaluation Board is NOT sold to Customer; all rights not expressly granted herein, including ownership of the Evaluation Board, are reserved by ADI. CONFIDENTIALITY. This Agreement and the Evaluation Board shall all be considered the confidential and proprietary information of ADI. Customer may not disclose or transfer any portion of the Evaluation Board to any other party for any reason. Upon discontinuation of use of the Evaluation Board or termination of this Agreement, Customer agrees to promptly return the Evaluation Board to ADI. ADDITIONAL RESTRICTIONS. Customer may not disassemble, decompile or reverse engineer chips on the Evaluation Board. Customer shall inform ADI of any occurred damages or any modifications or alterations it makes to the Evaluation Board, including but not limited to soldering or any other activity that affects the material content of the Evaluation Board. Modifications to the Evaluation Board must comply with applicable law, including but not limited to the RoHS Directive. TERMINATION. ADI may terminate this Agreement at any time upon giving written notice to Customer . Customer agrees to return to ADI the Evaluation Board at that time. LIMITATION OF LIABILITY. THE EVALUATION BOARD PROVIDED HEREUNDER IS PROVIDED “AS IS” AND ADI MAKES NO WARRANTIES OR REPRESENTATIONS OF ANY KIND WITH RESPECT TO IT . ADI SPECIFICALL Y DISCLAIMS ANY REPRESENTATIONS, ENDORSEMENTS, GUARANTEES, OR WARRANTIES, EXPRESS OR IMPLIED, RELATED TO THE EVALUATION BOARD INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTY OF MERCHANTABILITY, TITLE, FITNESS FOR A PARTICULAR PURPOSE OR NONINFRINGEMENT OF INTELLECTUAL PROPERTY RIGHTS. IN NO EVENT WILL ADI AND ITS LICENSORS BE LIABLE FOR ANY INCIDENTAL, SPECIAL, INDIRECT , OR CONSEQUENTIAL DAMAGES RESUL TING FROM CUSTOMER’S POSSESSION OR USE OF THE EVALUATION BOARD, INCLUDING BUT NOT LIMITED TO LOST PROFITS, DELAY COSTS, LABOR COSTS OR LOSS OF GOODWILL. ADI’S TOTAL LIABILITY FROM ANY AND ALL CAUSES SHALL BE LIMITED TO THE AMOUNT OF ONE HUNDRED US DOLLARS ($100.00). EXPORT . Customer agrees that it will not directly or indirectly export the Evaluation Board to another country, and that it will comply with all applicable United States federal laws and regulations relating to exports. GOVERNING LAW . This Agreement shall be governed by and construed in accordance with the substantive laws of the Commonwealth of Massachusetts (excluding conflict of law rules). Any legal action regarding this Agreement will be heard in the state or federal courts having jurisdiction in Suffolk County, Massachusetts, and Customer hereby submits to the personal jurisdiction and venue of such courts. The United Nations Convention on Contracts for the International Sale of Goods shall not apply to this Agreement and is expressly disclaimed.。
可控串补保护控制系统的设计

可控串补保护控制系统的设计苏春华【摘要】TCSC是FACTS家族中一名重要成员,其使用使串联补偿具有更大的灵活性与实用性.在TCSC基本原理及运行模式的基础上对该套装置的保护和控制系统进行了配置和设计.详细分析了可控串补中电容器、金属氧化物可变电阻(MOV)、晶闸管阀、火花放电间隙、平台、旁路断路器、冷却系统等设备的保护原理,阐述了各保护的功能及其作用.另外,还简单分析总结了TCSC本体保护对输电线路保护的影响,并针对实际工程中可控串补保护系统在调试及试运行期间发现的问题提出了相应的改进措施.最后,给出了TCSC保护控制系统的动作过程及通信流程的描述.【期刊名称】《电气开关》【年(卷),期】2011(049)006【总页数】5页(P26-30)【关键词】FACTS;可控串补(TCSC);控制系统;本体保护【作者】苏春华【作者单位】惠州供电局,广东惠州516001【正文语种】中文【中图分类】TM531 引言晶闸管控制的串联补偿电容器(TCSC)最早是在1986年由Virhayathil等人作为一种快速调节网络阻抗的方法提出来的。
在美国、瑞典、巴西的电网中已投运了部分可控串补装置,此外,印度、澳大利亚等国也在进行TCSC的研制计划。
我国自20世纪90年代中期开始对TCSC技术进行了长期的研究。
针对多条线路进行了安装TCSC的可行性论证,包括:伊敏—冯屯线、阳城—淮阴线、天平线(贵州天生桥——广西平果)。
2003年6月,我国第一个TCSC工程在天平线平果侧变电站建成投运,对500kV天平线Ⅰ,Ⅱ回采用FSC+TCSC补偿模式,总补偿度为40%。
2005年,由中国电力科学院研制的第一套国产化TCSC装置在甘肃省壁口—成县220kV电网投运,线路串补偿度达到50%[1]。
发展到今天,TCSC已是柔性交流输电系统(FACTS)家族中的重要成员。
文献[2]中详细介绍到:它通过调节线路电抗来控制潮流,从而提高线路传输能力,此外其快速控制能力可以更有效抑制低频功率振荡,消除次同步谐振,对提高电力系统运行可靠性和灵活性及改善线路性能具重大意义,对实现我国电力工业西电东送的发展战略有着十分广阔的应用前景[3]。
SRAM 设计介绍2007

Static Read Access Memory (SRAM) DesignAbhinandan Majumdar MS. Computer Engineering am2993@Srinivas Satish MS. Computer Engineering ssn2111@December 10, 2007Final ProjectEE 4321VLSI Circuits Prof. Azeez BhavnagarwalaI DEX1.I TRODUCTIO (1)1.1 Design (1)1.2 SRAM Operation (2)1.3 Applications and Uses (3)2.DESIG (5)2.1 Block Diagram (5)2.2 Decoder (6)2.2.1 2 Input And Gate Design (7)2.2.2 3 Input And Gate Design (11)2.2.3 3x8 Decoder (13)2.2.4 6x64 Decoder (14)2.2.5 Decoder Resizing (15)2.3 SRAM Cell and Array Design (17)2.3.1 Precharge Circuitry (17)2.3.2 SRAM Cell (18)2.3.3 Read Sensing Circuit (19)2.3.4 Write Driver (19)2.3.5 SRAM Array (20)2.3.6 SRAM Cell with Decoder (20)2.3.7 Read Stability (21)2.4 DC Simulation (22)2.4.1 Static Noise Margin (SNM) (21)2.4.2 Cell Read Current (23)2.4.3 Effect of Threshold Voltage (V t) (24)YOUT (27)3.1 Decoder (27)3.1.1 AND2 Gate (27)3.1.2 AND3 Gate (28)3.1.3 3x8 Decoder (29)3.1.4 6x64 Decoder (29)3.2 SRAM (30)3.2.1 Precharge (30)3.2.2 Read Sensing Circuit (31)3.2.3 SRAM 64x64 Array (32)4.RESULTS (35)4.1 Simulation Results (35)4.1.1 Simulation of One SRAM Cell (35)4.1.2 Simulation of 64x64 SRAM Array (36)4.2 DRC & LVS Results (37)5.CO CLUSIO (38)6.REFERE CES (39)1.I TRODUCTIOStatic random access memory (SRAM) is a type of semiconductor memory. The word "static" indicates that the memory retains its contents as long as power remains applied, unlike dynamic RAM (DRAM) that needs to be periodically refreshed.DesignFig 1.1 A six-transistor CMOS SRAM cell.Random access means that locations in the memory can be written to or read from in any order, regardless of the memory location that was last accessed.Each bit in an SRAM is stored on four transistors that form two cross-coupled inverters. This storage cell has two stable states which are used to denote 0 and 1. Two additional access transistors serve to control the access to a storage cell during read and write operations. It thus typically takes six MOSFETs to store one memory bit.Access to the cell is enabled by the word line (WL in figure) which controls the two access transistors M5 and M6 which, in turn, control whether the cell should be connected to the bit lines: BL and BL’. They are used to transfer data for both read and write operations. While it's not strictly necessary to have two bit lines, both the signal and its inverse are typically provided since it improves noise margins.During read accesses, the bit lines are actively driven high and low by the inverters in the SRAM cell. This improves SRAM speed compared to DRAMs—in a DRAM, the bit line is connected to storage capacitors and charge sharing causes the bitline to swing upwardsor downwards. The symmetric structure of SRAMs also allows for differential signaling, which makes small voltage swings more easily detectable. Another difference with DRAM that contributes to making SRAM faster is that commercial chips accept all address bits at a time. By comparison, commodity DRAMs have the address multiplexed in two halves, i.e. higher bits followed by lower bits, over the same package pins in order to keep their size and cost down.The size of an SRAM with m address lines and n data lines is 2m words, or 2m × n bits.1.2. SRAM operationA SRAM cell has three different states it can be in: standby where the circuit is idle, reading when the data has been requested and writing when updating the contents. The three different states work as follows:a) StandbyIf the word line is not asserted, the access transistors M5 and M6 disconnect the cell from the bit lines. The two cross coupled inverters formed by M1 – M4 will continue to reinforce each other as long as they are disconnected from the outside world.b) ReadingAssume that the content of the memory is a 1, stored at Q. The read cycle is started by precharging both the bit lines to a logical 1, then asserting the word line WL, enabling both the access transistors. The second step occurs when the values stored in Q and Q are transferred to the bit lines by leaving BL at its precharged value and discharging BL through M1 and M5 to a logical 0. On the BL side, the transistors M4 and M6 pull the bit line toward VDD, a logical 1. If the content of the memory was a 0, the opposite would happen and BL would be pulled toward 1 and BL toward 0.c) WritingThe start of a write cycle begins by applying the value to be written to the bit lines. If we wish to write a 0, we would apply a 0 to the bit lines, i.e. setting BL to 1 and BL to 0. This is similar to applying a reset pulse to a SR-latch, which causes the flip flop to change state. A 1 is written by inverting the values of the bit lines. WL is then asserted and the value that is to be stored is latched in. Note that the reason this works is that the bit line input-drivers are designed to be much stronger than the relatively weak transistors in the cell itself, so that they can easily override the previous state of the cross-coupledinverters. Careful sizing of the transistors in a SRAM cell is needed to ensure proper operation.1.3. Applications and Usesa) CharacteristicsSRAM is a little more expensive, but faster and significantly less power hungry (especially idle) than DRAM. It is therefore used where either speed or low power, or both, are of prime interest. SRAM is also easier to control (interface to) and generally more truly random access than modern types of DRAM. Due to a more complex internal structure, SRAM is less dense than DRAM and is therefore not used for high-capacity, low-cost applications such as the main memory in personal computers.b) Clock speed and powerThe power consumption of SRAM varies widely depending on how frequently it is accessed; it can be as power-hungry as dynamic RAM, when used at high frequencies, and some ICs can consume many watts at full speed. On the other hand, static RAM used at a somewhat slower pace, such as in applications with moderately clocked microprocessors, draw very little power and can have a nearly negligible power consumption when sitting idle — in the region of a few microwatts.Static RAM exists primarily as:(i) General purpose products•with asynchronous interface, such as the 28 pin 32Kx8 chips (usually named XXC256), and similar products up to 16 Mb per chip•with synchronous interface, usually used for caches and other applications requiring burst transfers, up to 18 Mb (256Kx72) per chip(ii) Integrated on chip•as RAM or cache memory in microcontrollers (usually from around 32 bytes up to 128 kilobytes)•as the primary caches in powerful microprocessors, such as the x86 family, and many others (from 8 KB, up to several megabytes)•on application specific ICs, or ASICs (usually in the order of kilobytes)•in FPGAs and CPLDs (usually in the order of a few kilobytes or less)c) Uses(i) Embedded UseMany categories of industrial and scientific subsystems, automotive electronics, and similar, contains static RAM. Some amounts (kilobytes or less) is also embedded in practically all modern appliances, toys, etc that implements an electronic user interface. Several megabytes may be used in complex products such as digital cameras, cell phones, synthesizers, etc. SRAM in its dual-ported form is sometimes used for realtime digital signal processing circuits.(ii)In computersSRAM is also used in personal computers, workstations, routers and peripheral equipment: internal CPU caches and external burst mode SRAM caches, hard disk buffers, router buffers, etc. LCD screens and printers also normally employ static RAM to hold the image displayed (or to be printed). Small SRAM buffers are also found in CDROM and CDRW drives; usually 256 KB or more are used to buffer track data, which is transferred in blocks instead of as single values. The same applies to cable modems and similar equipment connected to computers. The so called "CMOS RAM" on PC motherboards was originally a battery-powered SRAM chip, but is today more often implemented using EEPROM or Flash.2.DESIG2.1 Block DiagramThere are two major blocks to be designed:•Address decoder: The address decoder takes in the 6 address lines a4:0 coming from the latch, and decodes them to generate 64 wordlines WL0-63 for the SRAM array.•SRAM array: Consists of an array of 64 x 64 bit SRAM cells. In addition to these blocks, the array also contains circuitry that allows data to be written intothe array, and for precharging the bitlines to V DD before the read operation; these circuits are not shown in figure.2.2 DECODERTo construct a 64x64 bit SRAM, we need 6x64 Address Decoder to select one of the word lines of 64 rows, each containing 64 1b SRAM cells. Hence we need to make the decoder logic fastest so as it doesn’t become the bottleneck of our whole design. Hence considering speed and layout issues, we are taking up Domino Logic for all the intermediate nodes being used.For designing a 6x64 Decoder, we can either have three 2x4 decoders in 1st stage and perform ANDING of the corresponding outputs to have a 6x64 decoder logic, or we can have two 3x8. But for the former case, we need 64 three input AND gate and 12 two input AND gate and which is designed through domino logic, while the later design has 64 two input AND gates and 16 three input AND gate, hence considering the space limitations as three input AND gate takes much more area and offer higher gate capacitance, we choose the later design for 6x64 decoder.Fig 2.2: 6x64 Decoder using 2x4 decodersFig 2.2: 6x64 Decoder design using two 3x8 decoders2.2.1 2 Input A D Gate Design – We designed 2 Input AND gate using DominoLogic. Here is the schematic of the designFig 2.3: Schematic Design of AND2 Gatei)Frequency Calculation. We kept input A & B at 1.2V, and saw how fast canit be operated at higher frequency, and we found that it atleast needs 0.4ns or2.5Ghz.Fig 2.4: Frequency Variation for AND2 Gateii)PFET size calculation. We tried to simulate for varying Pfet size and found that we need to keep pfet minimal as well as optimum to charge the bitline faster at a given frequency of 2.5Ghz. We decided upon pfet size to be 715nm so as precharges at a faster rate.Fig 2.5: Pfet width variation for AND2 Gateiii)Sizing of nfets – We try to scale the nfet array so as the propagation delay could be minimized. Increasing the scaling decreases the propagation delay, hence decided upon a = 1.3Fig 2.6: NFET Size variation for NFETiv)Keeper PFET sizing – Keeper PFET is the one whose gate is driven by the output of the inverter, and prevents the voltage drop across the intermediate capacitance to drop below the V M of the inverter during evaluation stage. First graph is that of clock. Second graph shows that if we don’t have any pfet, the output voltage rises by mV. If we connect it to a pfet and increase its size by b*(sum of the width of nfet array), we see the outout to be stable at 0 and randomness decreases by increase in b. Hence we find b = 0.15.Fig 2.7: Keeper PFET sizing for AND2 gatev)Inverter Sizing. Though we should make the nfet stronger than pfet so as the voltage drop across intermediate capacitance is greater than VM of inveter.But making nfet stronger adds delay, so by adding a Keeper Pfet so as to keep the intermediate capacitance charged, we can increase our pfet to have same rise and fall time. Hence we find the beta ratio to be 2.45.Fig 2.8: Inverter size variation for AND2 Gate2.2.2 3 I PUT A D GATE. The ratios which we got for 2 INPUT AND Gate arekept same for 3 INPUT too, but the confusion should we use 2 cascadedAND2 gate for a 3 Input AND or single 3 INPUT AND. Hence we computedthe propagation delay, and found following things. AND2_1 and AND2_2 iscascade 2 AND with changing line in 1st and 2nd AND respectively.Gate High to Low Low to High PropagationDelayAND2 0 1.15ns 0.575nsAND2_1 (cascaded) 0 1.18ns 0.59nsAND2_2 (cascaded) 0 1.19ns 0.595nsAND3 0 1.46ns 0.73nsHence cascaded AND2 would make our design faster but could make it asymmetrical, hence we chose AND3.AND2 (Only one 2 Input AND) AND2_1 (Cascaded 2 Input AND)AND2_2 (Cascaded 2 Input AND) AND3 (3 Input AND)2.2.33x8 DECODER – Here is the schematic for the Decoder.Fig 2.9: 3x8 Decoder SchematicAnd, here is the simulation graph,Fig 2.10: Simulation of 3x8 Decoder2.2.46x64 Decoder – We used two 3x8 decoders and used 2 AND for having the64x6 decoder logic. Here is the schematicFig 2.11: Schematic of 6x64 DecoderWe kept all inputs A1-A5 at 0 and sweeped A0 from 0 to 1.2V, and saw that Y0 dropping out and Y1 rising to 1.2V.Fig 2.12: Propagation Delay at the Critical Path for 6x64 Decoder2.2.5Decoder Resizing.The delay what we got after designing was 5.177ns – 5.025ns = 0.152ns when running at 1Ghz and driving a capacitance of 39.931fF. We computed the end capacitance having the value of gate capacitance as 1fF/um and width capacitance as0.2fF/um. In this case the AND3 nfets have W1 = 1u and rest being size by the ratio1.3, inveter nfet has W2 = 1um, AND2 nfets have W3 = 1u and sized accordingly with ratio 1.3 and inverter has W4 = 1um.To have minimal delay so as to have equal rise time and fall time, we optimized the sizes as follows,For AND3,NFET Array: 2u, 2.6u, 3.38u, 4.395uPFET: 3uKeeper PFET: 800nmInverter: NFET – 3uPFET – 2.9uFor AND2,NFET Array: 5.8u, 7.54u, 9.8uPFET: 3.2uKeeper PFET: 2.2uInverter: NFET – 3uPFET – 2.9uHere’s the critical pathFig 2.13: Schematic of Critical Path in 6x64 DecoderWe obtained a fall and rise time for the four stages as follows 33.94ps, 34,94ps, 33.23ps, 34.99ps. By this, our propagation delay got reduced from 152ps to 89ps (1.594ns – 1.505ns = 89ps). Hence we stick to this sizes.Fig 2.14: Propagation of Critical Path in 6x64 Decoder after Optimization2.3 SRAM cell and array design2.3.1 Precharge circuitryThe schematic of the precharge circuit is shown below. The pfet are of 1um width. This large width of the pfet is required to be able to charge the bitline quickly during the pre-charge phase. The huge width ensures that the bit-line BIT and BIT_B are charged to VDD in half the clock cycle.Fig 2.15: Schematic of Precharge Circuit2.3.2SRAM Cell.Schematic of the cell is shown below. The sizes of the access transistors, inverternfet, pfet widths are as per the ones given in the layout.Fig 2.16: Schematic of SRAM Cell2.3.3 Read Sense CircuitSchematic of the read large sense circuit is shown below. The basic NAND gate is sized with nfet=280nm and pfet width of 560nm a ratio of 4.8:1. This is the required ratio in the 90nm process with channel length=80nm for achieving ideal rise and fall times.Fig 2.17: Schematic of Read Sense Circuit2.3.4 Write driverThe write driver is enabled by a Write_enable line. The schematic is shown below.Fig 2.18: Schematic of Write Circuit2.3.5 The complete SRAM ArrayFollowing is the schematic of 64x64 bit SRAM cellFig 2.19: Schematic of SRAM Array2.3.6 SRAM Array with DecoderHere is the schematic of the complete SRAM with DECODER,Fig 2.20: Schematic of SRAM Array with 6X64 Decoder2.3.7 Read StabilityThis is an important characteristic of the SRAM Cell. During a read-operation one of the bitlines either BIT or BIT_B is discharged though the access transistor and an nfet of the inverter. During this discharge process, a large amount of current flows through node A ( shown below). Read stability is a measure of the potential at node A, this potential should not exceed the switching threshold of the other inverter. If it does then the state of the SRAM has changed. An analogous analysis was done in identifying tradeoffs in Read Current and Static Noise Margin.Following is the READ STABILITY Graph.Fig 2.21: Simulation of Read Stability2.4DC SIMULATIO2.4.1STATIC OISE MARGIHere is the schematic of the SRAM for Static Noise Margin Measurement. We sweep the left voltage and measure the right voltage and do vice versa and find the min edge of the max box that can fit into the butterfly curve.Fig 2.22: Schematic of SRAM Array with 6X64 Decoder(i)HOLD operation. We keep the gate of the pass transistors at GND and getthe following curve. The SNM for this is 0.4604.Fig 2.23: Hold operation(ii)READ - The SNM we got was 0.1616V. The graph is as follows.Fig 2.24: Static Noise Margin estimation of SRAM Cell2.4.2Cell Read CurrentCell read current equals the current that flows through the pass gate nfet connected to the BL draining charge on the BL into the cell ground terminal. The larger the current the faster BL gets discharged and develops a signal for the sensing circuit to detect. Having a very large Read Current flowing through the discharge path from bit line to the ground could result in the exceeding the read stability threshold. This can be avoided by optimally choosing the sizing of the access nfet and the discharge nfet of the respective inverted during a read operation cycle.Fig 2.25: Cell Read Current Simulation2.4.3 Effect of Threshold Voltage (V t )We change Vt by 25mV, 50mV, 100mV and 200mV by adding a –ve voltage to the gate and got following values. Vt Pass nfet Pull down nfet Pfet 25mV 0.1638 0.1626 0.1518 50mV 0.1725 0.1655 0.1483 100mV 0.1900 0.1732 0.1422 200mV 0.2246 0.1778 0.1252Fig 2.26 - Effect of SNM by increasing V t at pass nfetFig 2.27- Effect of SNM on increasing V t at pull down nfetFig 2.28- Effect of increasing V t at one end of pfet and measuring other side.YOUT3.1 DECODER3.1.1 A D2 Gate.Here is the layout of AND2 gate which passes both DRC and LVSFig 3.1- DRC and LVS results for AND2 Gate along with layout.3.1.2 A D3 Gate.Here is the layout of AND3 gate which passes both DRC and LVSFig 3.2- DRC and LVS results for AND3 Gate along with layout.3.1.3 3x8 DECODERHere is the layout of 3x8 Decoder which passes both DRC and LVSFig 3.3- DRC and LVS results for 3x8 Decoder along with layout.3.1.4 6x64 DECODERHere is the layout of 3x8 Decoder which passes both DRC and LVSFig 3.4- DRC and LVS results for 6x64 Decoder along with layout.3.2 SRAM3.2.1 Precharge circuit layoutThe width of the entire precharge circuit layout should be equal to the width between the two bit lines BIT and BIT_B. Below is an image of our layout of this circuit with its DRC and LVS results.Fig 3.5- DRC and LVS results for Precharge Circuit along with layout3.2.2Read Sense Amp CircuitIn the layout of the read circuit, care has to be taken to ensure that it fits exactly in between the two bitlines. The symmetric lateral reflection layout of the SRAM cells adds some degree of complexity, this being due to the fact that now we would have a series of BIT, BIT_B, BIT_B, BIT followed by the same pattern. For a read it is sufficient to sense one of the bit lines, either BIT or BIT_B. Two read sense amps would have to be fit between the two BIT lines. The LVS results and the layout of the Read Sense amp can be found in the image below.Fig 3.6 DRC and LVS results for Read Sense Amplifier along with layout3.2.3SRAM 64 X 64 arrayUsing the SRAM Cell provided from the standard library, we created a symmetrical and laterally inverted 2 X 2 network of SRAM cells. This was done to achieve a good sharing of the power rails and to reduce the bit line noise reduction. Though not done in our layout cross coupling bit lines would reduce the bit line noise to a very good extent.Using an instance of 2 X 2 SRAM cells the entire array of 64 X 32 top half and 64 X 32 bottom halves as shown in the schematic of phase two was laid out. Following this is the insertion of the Read Sense Amplifiers in between the top half and bottom halves of theentire SRAM array layout. To the left of the image below is the layout of the 2 X 2 network of SRAM cells and to the right the 64 X 64 layout of SRAM cells.Fig 3.7- Array of SRAM Cells, 2 X 2 and 64 X 64 arrays.Image below shows the DRC test results:Fig 3.8: DRC results for the 64 X 64 SRAM arrayHere’s the complete layout of SRAM cell with decoder.Fig 3.9: 64 X 64 SRAM array along with 6x64 Decoder4.RESULTS4.1 Simulation Results4.1.1 Simulation for One Cell SRAMWe simulated a single cell SRAM with following schematicFig 4.1 – One Cell SRAM SchematicBelow is a graph showing the Write – 1 Read – 1 Write – 0 simulation on a single SRAM cell.Fig 4.2 – One Cell SRAM Simulation4.1.2Simulation for 64x64 bit SRAM ArrayHere is the schematic used for 64x64 bit SRAM ArrayFig 4.3 –64x64 SRAM Arrayand here are the simulation results, when din<0> = 1, din<1> = 0, and din<2> = 1 with address line as 000000, and clock running at 1 Ghz.Fig 4.4 – Simulation for complete 64x64 SRAM cell Array4.2 DRC and LVS ResultsThe DRC and LVS were checked for each component individually. The following is a summary of the results:Functional Component DRC LVS6 X 64 Decoder Passed PassedPrecharge Passed PassedRead Sense Amp Passed Passed64 X 64 SRAM array Errors ErrorsPlease find all reports to these tests at the following location on/home/user5/fall07/ssn2111/LVS_FinalReports/home/user5/fall07/ssn2111/DRC_FinalReports5.CO CLUSIOAs a SRAM project for EE 4321 VLSI course, we designed 64x64 bit SRAM cell both at the schematic and layout level. We attempted to design the 6x64 decoder using 3x8 decoder using two and three input AND gates using Domino Logic. We could successfully simulate and verify the functionality of the components which we targeted to design. Though we couldn’t successfully pass the DRC and LVS of entire unit because of the primary reason that the unit cell being provided to us failed at DRC and LVS level, but we could successfully pass the DRC and LVS of other individual components including Pre-Charge, Read Sensing Circuit and 6x64 Decoder.The experience on working for such a design oriented project gave us a thorough insight what all critical issues we need to consider while designing a simple unit. This also made us familiar with the different approaches to implement the same design and decide what the tradeoffs between different alternatives are. Also, it made us aware of the critical physical implementation issues which we not only have to consider during actual layout but also during schematic level design. It also gave a hand-on experience upon CAD tools like Cadence, Virtuoso, Spice and Spectre widely used both at industrial and academic level for circuit designing. Overall, it was a nice experience both at learning, practicing and designing a most critical part of processor unit widely used in any Computer Architecture.6.REFERE CES1./wiki/Static_random_access_memory2.Cmos Logic – Uyemura3.CMOS VLSI Design – Weste & Harris4.Static-Noise Margin Analysis of CMOS SRAM Cells EVERT SEEVINCK,SENIOR MEMBER, IEEE, FRANS J. LIST, AND JAN LOHSTROH, MEMBER, IEEE.5.Analyzing Static Noise Margin for Subthreshold SRAM in 65nm CMOS BentonH. Calhoun and Anantha Chandrakasan6.Transistor Sizing for Reliable Domino Logic Design in Dual Threshold VoltageTechnologies by Seong-Ook Jung, Ki-Wook Kim, Sung-Mo (Steve) Kang。
Proceedings of the Institution of Mechanical Engineers, Part D- Journal of Automobile Engineering

951 Dynamics and control of gearshifts on twin-clutch transmissionsM Goetz*,M C Levesley,and D A CrollaSchool of Mechanical Engineering,University of Leeds,Leeds,UKThe manuscript was received on14May2004and was accepted after revision for publication on30March2005.DOI:10.1243/095440705X34720Abstract:Based on a detailed dynamic model of an automotive powertrain containing a twin-clutchtransmission,an integrated powertrain control for gearshifts is developed.The operation of this con-troller is demonstrated on the basis of simulation results for upshifts,downshifts,and multiple gear-shifts taking place within the same half of the transmission.The control algorithm makes use ofclosed-loop control of clutch slip for a smooth transfer of engine torque with the aim of reproducingthe operation of a one-way clutch.Further elements are a closed-loop control of engine speed througha combination of a manipulation of engine controls and clutch pressure.In addition,it is demonstratedthat the control of transmission output torque during gearshifts can add robustness to the controland provides a means to manipulate directly the gearshift character.Finally,the dynamic effects ofgear preselection through conventional hydraulically actuated cone-type synchronizers on the overallshift quality are discussed.Keywords:twin-clutch transmission,dual-clutch transmission,gearshift control,automatictransmission control,clutch control1INTRODUCTION friction clutch.The two halves of the twin-clutchtransmission consist of simple gear sets and syn-chronizers such as found on conventional manual The design principle of the twin-or dual-clutchgearboxes.This mechanical design offers superior transmission originates in a patent by Ke´gresse[1]mechanical efficiency to that of planetary-type auto-back in1939.The idea behind this transmission con-matic transmissions equipped with a hydraulic torque cept is to split a manual gearbox into two halves.Oneconverter and explains why the twin-clutch trans-half of the transmission carries the odd gear ratiosmission is of interest from an economical and driving while the other carries the even gear ratios,as shownperformance point of view.in Fig.1.Each of the two halves(each half consistsHowever,the automatic control of the two friction of an input shaft,gears,synchronizers and a layshaft)clutches during gearshifts has to be performed with of the twin-clutch transmission is connected to thegreat care.In particular,the lack of one-way clutches engine through a separate friction clutch.The torque(i.e.clutching element that engages when running of both transmission halves is gathered at the out-in one direction of rotation and disengages when put of the transmission by a gear stage meshing withrunning in the other direction),which help to smooth output gears located on both layshafts.Gearshiftsthe transfer of engine torque in the torque phase can be accomplished as clutch-to-clutch shifts byof gearshifts on planetary-type automatic trans-changing from one half to the other,thereby retain-missions,seemed for a long time difficult to com-ing full traction at the wheels.This characteristic ofpensate through clutch control.Also,the inability to the twin-clutch design enables powershifts as on askip one gear(i.e.multiple gearshifts such as from conventional planetary-type automatic transmissionfourth to second gear)without disengaging the and thus eradicates the principal disadvantage oftorque-transmitting clutch was considered a major automated manual transmissions utilizing only oneshortcoming.After renewed interest in the1980s *Corresponding author:School of Mechanical Engineering,[2,3],where the twin-clutch design had been applied University of Leeds,Woodhouse Lane,Leeds LS29JT,UK.email:to race cars,only the advent of faster and morecapable electronics at the end of the1990s led to full menmg@952M Goetz,M C Levesley,and D A CrollaFig.1Twin-clutch transmission of two-layshaft typeinterest from all major car and transmission manu-for gearshifts,which produces high shift quality facturers.In2003,the twin-clutch transmission[4]comparable with that of planetary-type automatic wasfinally put into production for thefirst time.transmissions.Another important aim is to create a The problems of the control of both a singlegearshift control that is robust against changes in gearshift and multiple gearshifts on twin-clutch the clutch friction coefficient and allows the track-transmissions are addressed in this paper.Theing of transmission output torque trajectories,thus requirement for robust operation of the control of providing a basis for integration in torque-based gearshifts under a variety of operating points andpowertrain control schemes.conditions(e.g.changes in clutch friction)necessitatethe employment of closed-loop control techniques.For conventional automatic transmissions,closed-2DYNAMIC POWERTRAIN MODELloop control has been mainly applied to enginesynchronization[5],leaving the control of the engine For the simulation of gearshift performance,adynamic model of a vehicle powertrain was torque transfer to a combination of one-way clutchoperation and open-loop clutch pressure manipu-developed.lation.For twin-clutch transmissions the potentialsThe whole powertrain model is depicted in Fig.2 of various gearshift control concepts applied to up-and features a mean value torque production model shifts was compared in reference[6].The solutionof a spark ignition engine that was given in reference that offered the best gearshift performance was a[8]and that makes use of regression functions for closed-loop strategy,where the transmission outputairflow through throttle body and intake manifold torque was controlled throughout the whole gear-and for the torque generated in the combustion shift.The control of multiple gearshifts was addressedprocess.Also included in the engine model are the in reference[7]where a solution for so-called‘double rotational dynamics of the engine and accessory shifts’was proposed.The control described in thatloads.Inputs to the engine model are throttle angle article used the second clutch to provide somefill-and spark advance.The block representing the twin in torque for the time that the torque-transmittingclutch transmission in Fig.2consists of two parts: clutch has to be disengaged in order to be able to the rotational dynamics of clutches,synchronizers change the gear in that particular transmission half.and geartrain,and the dynamics of the hydraulic The control strategy presented in that paper,how-system.Inputs to the transmission block are pressure ever,made exclusive use of open-loop techniques.values for clutches and synchronizers,which are The objectives of this paper are to investigate the actually voltage inputs to the solenoid valves con-dynamics of gearshifts on twin-clutch transmissionstrolling the hydraulic actuation of clutches and and to develop an integrated powertrain control synchronizers.Dynamics and control of gearshifts on twin-clutch transmissions953Fig.2Model of a vehicle powertrain including a twin-clutch transmissionThe dynamic models of powertrain and hydraulic components of the transmission,while massless system were created in MATLAB/Simulink A,whichspring–damper elements are employed to model the was also used to generate the simulation results compliances of the shafts in the gearbox.To model presented in this paper.the drag that is created in the twin-clutch trans-mission,the inertias are‘connected’to the groundvia damper elements.2.1Rotational dynamics of the twin-clutchIn order to model the dynamics of a shift from transmissionsynchronizer to synchronizer where both gear ratios Figure3shows the dynamic model of the twin-clutch(i.e.synchronizers)are located within the same half transmission,which is based on the layout presented of the transmission,the dynamic model of the in Fig.1.twin-clutch transmission depicted in Fig.3had to Inputs to this part of the transmission model are be extended by an additional synchronizer model the clamp forces at clutches and synchronizers.Non-(indicated by the dashed rectangle in Fig.3).This compliant discs represent the inertias of the internalprovided the basis for realistic modelling of a changeFig.3Rotational dynamics of the twin-clutch transmission,depicted for the configuration of first and second gears.Extension is shown for third gear954M Goetz,M C Levesley,and D A Crollabetween synchronizers without producing discon-additional rules given bytinuities in the simulation results.This extension to IF {v in =v out }AND {x s Áx s,max }THENthe transmission model is used later in sections 3.3and 4.{dog clutch is engaged}(6)Both the synchronizer and the clutch models con-IF {x s <x s,max}THEN {dog clutch is disengaged}sist of a friction model that describes the torque transmitted in the slipping and in the sticking states.(7)It also contains the logic of the transitions between the two states.The synchronizer model incorporates These two equations essentially reflect the fact that a third state,which accounts for a mechanical lock-the dog clutch can be engaged once the two halves ing of its two halves via the dog-clutch-like part of of the synchronizer run with the same speed and the synchronizer.The friction behaviour of clutch thus the teeth can slide to their maximum axial dis-and synchronizer is given by the equations placement,thereby mechanically locking the syn-chronizer.If the teeth of the dog clutch are slid back T C =sgn(v in −v out )R m F N m k z (1)into their initial position,the mechanical coupling is neutralized.The information about the displacement with of the dog clutch comes from the actuator model of the synchronizer.m k=f (D v )(2)for the clutch,and 2.2Hydraulic actuation of clutches andsynchronizersTsyn =sgn(v in −v out )Rm sin a F N m kz (3)The hydraulic system of the transmission model gen-erates a clamp force at its output (i.e.input to the rotational dynamics described in the last section)withfrom a voltage input to the solenoid valves.The hydraulic actuation scheme is the most commonly m k=constant (4)used so far,particularly in conjunction with wet friction clutches.Electric actuation in conjunction for the synchronizer.If the clutch–synchronizer slips with dry friction clutches o ffers increased simplicity (v in ≠v out),the friction torque is given by equation and e fficiency but tends to show more compliance (1)for the clutch and equation (3)for the syn-in the actuation system and hence slower response chronizer.The friction coe fficient of the clutch is times.dependent on the sliding speed across the clutch and First,a detailed dynamic model of the hydraulic was represented by a higher-order polynomial as a actuation system was developed.The hydraulic clutch function of the sliding speed.This allowed modelling actuation consists of a proportional solenoid valve,of various friction materials of both wet and dry which controls oil flow to the hydraulic actuator.friction types.The friction coe fficient at the syn-Increasing the pressure in the hydraulic actuator chronizer has been assumed constant.extends the actuator piston,which acts on the clutch If both halves of the clutch–synchronizer stick pack,thus producing a clamp force.The model of together (v in =v out)the torque at the clutch–synch-the clutch pack essentially contained the equations ronizer is determined by the applied load torques of motion of the piston including the opposing forces and inertial torques and is limited by of the return spring and the clutch pack.This clutch pack model permits a simulation of the dynamic |T C,syn|∏m s R m F Nz(5)behaviour of the hydraulic clutch actuation at the A frictional lock-up of the clutch–synchronizer takes point where the clutch piston has ended its idle place if the di fferential speed across the clutch stroke and makes contact with the clutch pack,lead-vanishes and the criterion of equation (5)is fulfilled.ing to a sharp rise in clutch pressure.Based on The frictional contact of the clutch–synchronizer the detailed model,a simplified phenomenological breaks apart if the torque at the clutch–synchronizer model was generated for the development of the exceeds the limit given by equation (5).gearshift controller,since it was less complex and The additional state coming from a mechanical more flexible.The simplified model of the hydraulic locking of the synchronizer through engagement actuation is depicted in Fig.4and consists of two linear transfer functions and a feedback loop.of the dog clutch was accounted for by simpleDynamics and control of gearshifts on twin-clutch transmissions955Fig.4Simplified dynamic model of the hydraulic actuation and clutch pack in the s domain3INTEGRATED POWERTRAIN CONTROL OF of engine torque transfer without creating too much GEARSHIFTSvehicle jerk.If it is possible to mimic the operationof a one-way clutch by careful control of a friction Gearshifts on twin-clutch transmissions can beclutch,then the optimal transfer of engine torque accomplished as so-called clutch-to-clutch shifts could be accomplished even on a twin-clutch trans-by changing from one half of the transmission tomission.Such a control was suggested in references the other.However,before commencing the clutch-[9]and[10]and requires closed-loop control of to-clutch shift,the target gear needs to be engagedclutch slip.(preselected)on the opposite half of the trans-The problem of obtaining the torque signal and mission.Essentially,the gearshift on a twin-clutchthe advantages and disadvantages of each technique transmission consists of two parts:(sensor measurement versus mathematical observer)are not discussed here but are well covered in the (a)the preselection of the target gear on the torque-literature(see,for example,references[6],[11],and free half of the transmission;[12]).(b)the clutch-to-clutch shift.The clutch-to-clutch shift is the subject of this3.1Control of upshiftssection whereas the preselection(in particular,thedynamic effects of the gear change)is discussed in The control algorithm for power-on upshifts is section4.depicted in Fig.5.The control sequence is shown in The clutch-to-clutch shift consists of two distinctive the clutch pressure profiles of the simulation result parts:a‘torque phase’where engine torque is trans-(upshift fromfirst to second gear)in Fig.6.In step1 ferred from the offgoing clutch to the oncoming of the control algorithm,hydraulic pressure is reduced clutch and an‘inertia phase’where the speed of theat the offgoing clutch.The nearer the pressure is engine is synchronized to that of the target gear.decreased to the value where the clutch starts to The order of the two phases depends on the type ofslip,the smaller are the resulting torque vibrations shift(i.e.upshift or downshift)and the direction coming from the stick–slip transition.However,theactual transition from stick to slip at this clutch of the transmission of drive power(i.e.power-on orpower-off).is accomplished by the clutch slip control,which is The clutch-to-clutch shift can be controlled inactivated in step3.Prior to activation of the clutch principle in the same manner as on planetary-type slip controller,the oncoming clutch is prefilled in transmissions.However,because of differences instep2.This pressure needs to be selected on the the design(in particular,the absence of one-way basis of a compromise between fastfilling on one clutches on twin-clutch transmissions)the transferhand and little effect on driveline torque on the of engine torque in the torque phase becomes more other.The closed-loop control of clutch slip main-tains a small clutch slip reference value(5rad/s)by difficult to control.This is due to the difficulty incontrolling the timing of the application and release manipulating the pressure at the offgoing clutch.By of the two clutches.One-way clutches and theirramping up the pressure at the oncoming clutch ability to disengage automatically once the trans-(step4),the slip controller automatically reduces the mitted torque has become negative aid the controlpressure at the offgoing clutch,thus transferring956M Goetz,M C Levesley,and D A CrollaFig.5Algorithm for upshift controlFig.6Simulation result of an upshift fromfirst to second gear(BTDC,before top dead centre).The arrows and numbers indicate the steps of the control algorithm depicted in Fig.5engine torque without creating negative torque at In this phase,the engine speed is synchronized to this clutch.At the point where the pressure at thethat of the target gear while tracking a reference offgoing clutch has become zero,the slip controller speed profile.The closed-loop speed controller,whichis activated in step5,achieves this by manipulating is deactivated and the control can proceed to theinertia phase.both engine throttle angle and spark advance(SA),957 Dynamics and control of gearshifts on twin-clutch transmissionsthus uniting the advantages of large engine torque From the output torque profile in Fig.6,it can be variations and fast engine response.In the inertiaseen that the torque does not show any abrupt phase,transmission output torque control can be changes at the point of the transition from the torque activated(step6)in which closed-loop trackingto the inertia phase,thus verifying the smooth of a reference torque profile is achieved through control of the engine torque transfer by the clutch manipulation of pressure at the oncoming clutch byslip controller.the controller.The reference torque profile used heregoverns the transmission output torque to a level3.2Control of downshiftscorresponding to the change in gear ratio over thewhole gearshift.At the end of the inertia phase the The power-on downshift starts with the inertia phase clutch pressure is raised to the line pressure(step7),where the engine is synchronized to the target gear, which is the main pressure in the hydraulic system.followed by the torque phase where engine torque istransferred between the two clutches.The control It was observed that the torque vibrations createdat the end of the gearshift where the clutch locks up algorithm for downshifts is depicted in Fig.7.Again could be reduced by abruptly raising the sparkthe steps of the control algorithm are indicated in the advance to its original value at this point.Further simulation result depicted in Fig.8.At the beginning details of the upshift control including a discussionof the inertia phase(step1in Fig.7),the pressure at of robustness against changes in the clutch friction the offgoing clutch is reduced in a similar way as in material have been given in reference[13].the torque phase of the upshift control.Through-Figure6shows a simulation result for an upshift out the inertia phase of the downshift the engine from thefirst to second gear.The graph depicts theneeds to be accelerated in order to reach the syn-time profiles of transmission output torque T out,the chronous speed of the target gear.A combination rotational speeds v at both clutches including engineof an increase in throttle angle(step2)and clutch speed(denoted as input speed),the pressure pro-pressure modulation by the speed controller(step3)files p C at both clutches,the throttle angle and theallows tracking of a reference speed profile without spark advance(denoted Throttle and SA).In general,having to decrease the clutch pressure too much, good tracking of the reference profiles for enginethus transmitting as much engine torque as possible. speed(second graph)and transmission output torque Prior to the end of the inertia phase,the oncoming (uppermost graph)can be observed.clutch is prefilled in step4(low pressure to suppressFig.7Algorithm for downshift control958M Goetz,M C Levesley,and D A CrollaFig.8Simulation result of a downshift from second tofirst gear(BTDC,before top dead centre).The arrows and numbers indicate the steps of the control algorithm depicted in Fig.7torque vibrations)and the throttle angle is decreased a downshift from second tofirst gear is depicted again in step5.in Fig.8.Once again,it can be seen that the track-In a similar way as previously explained for the ing performances of speed and torque reference upshift,clutch slip control is employed in the torquetrajectories are good.The output torque profile of phase for a smooth transfer of engine torque(step6).the downshift depicted in Fig.6looks reasonably In parallel with the clutch slip control,the optionalsmooth,owing to the relatively shallow gradient transmission output control can be activated(step7).of the reference torque trajectory selected in the Although the clutch slip controller takes care oftorque phase.the engine torque transfer,the transmission outputtorque profile can take different shapes depending3.3Control of multiple gearshiftson the operating point of engine and the gear ratio.To be able to manipulate the profile of the trans-As explained in the introduction,gearshifts thatchange between gears within the same half of the mission output torque,closed-loop torque controlcan be activated in the torque phase.To implement transmission(e.g.from fourth to second gear)cannot the output torque control without losing the functionbe accomplished as simple clutch-to-clutch shifts. of the clutch slip control,the pressure manipulation During the period of time where the original gear is at the oncoming clutch is split into two actions.Thedisengaged and the target gear engaged,the appro-first action requires ramping up the pressure,but at priate half of the transmission needs to be torque a lower rate than required in the torque phase of thefree.This means,however,that since both the upshift.This is necessary to force the slip controller original gear and the target gear are located within to transfer engine torque gradually.Then,the secondthe same half of the transmission,the torque-action comes from the closed-loop torque control,transmitting clutch has to be disengaged for the which adds its contributions in the pressure manipu-change in gears.The result would be a gearshift lation to the pressure ramp of thefirst control action.similar to a manual or automated manual trans-Further details of the downshift control havemission with interruption in traction,which is not been given in reference[14].A simulation result for acceptable for a powershift transmission.959 Dynamics and control of gearshifts on twin-clutch transmissionsTwo or more consecutive gearshifts would fulfil the transferred to the other clutch in steps5and6.The requirement of transmitting power to the wheelsremainder of engine torque is used for continuing during the gearshift,but these would result in un-the acceleration of the engine.The change of clutch acceptably long shift times and would be distinguish-in steps5and6is accomplished through conven-able as two separate gearshift events by the driver.tional open-loop pressure ramps.Owing to the small To solve the problem,it was proposed to use theamount of engine torque transferred,no significant second clutch during the gear change in order to improvement in clutch slip control over the open-provide somefill-in torque[7].This technique isloop controlled clutch change was noticed.A second adopted here and combined with the techniques reason why the clutch slip control was not aseffective here as it was in the normal torque phase of engine control,clutch slip,and torque controldeveloped in the previous sections.Since multiple is that,for its operation,the engine needs to be downshifts are,because of the importance ofdecelerated to the input shaft speed of the inter-response time,more critical than multiple upshifts,mediate gear,which would result in increased vehicle only multiple downshifts are discussed here.Thejerk.control algorithm for multiple downshifts is depicted While the gear is changed in the torque-free halfof the transmission through a change in synchronizer in Fig.9.The steps in the control algorithm that aredifferent from the control of single downshifts are in steps8and9,the engine speed controller is active indicated by arrows in the simulation result shownat the torque-carrying clutch(step7).The pressure in Fig.10.value at the engaging synchronizer is mainly deter-Up to step4,the control algorithm in Fig.9is themined by the time available for synchronization and same as for single downshifts.However,instead of the gear ratio.After synchronization of the input transferring the full amount of engine torque in theshaft to the target gear is completed,the syn-subsequent phase,only a part of engine torque is chronizer pressure is raised to line pressure(step10).Fig.9Control algorithm for multiple downshifts960M Goetz,M C Levesley,and D A CrollaFig.10Simulation result of a downshift from fourth to second gear(BTDC,before top dead centre).The arrows and numbers indicate the steps of the control algorithm depictedin Fig.9Subsequent to the prefilling of the original clutch In this section,the dynamic effects of preselection (step11)the actual torque phase begins,which ison the overall gearshift quality will be investigated. controlled in the same way as for single downshifts,A simple preselection strategy is employed thatrequires that a gear lower than the presently engaged again employing clutch slip control and transmissionoutput torque control.gear has to be selected on the torque-free half of the Figure10depicts a simulation result for a down-transmission.This has the advantage that the trans-shift from fourth to second gear.The speed trajectory mission is always prepared for a downshift without of the engine in Fig.10clearly indicates that thefirst having to change the target gear.engine accelerates constantly throughout the whole The engagement of the target gear ratio on the inertia phase,comparable with a single gearshift.torque-free half of the transmission requires syn-Thus,the driver experiences the multiple–gearshift chronization of the input shafts to the speed level event as a single gearshift event.Traction is inof the target gear.When changing to a target gear general maintained throughout the gearshift.In the lower than the gear currently engaged,the input torque phase the reference torque profile is trackedshaft needs to be accelerated.When changing to a accurately apart from an initial deviation.target gear higher than the gear currently engaged,the input shaft needs to be decelerated.If this syn-chronization process is carried out by use of conven-tional synchronizers,the energy for this speed change 4DYNAMIC EFFECTS OF GEAR PRESELECTIONis transferred from the output of the transmission.ON GEARSHIFT PERFORMANCE Other methods of synchronization include central syn-chronization with an external energy supply(external As mentioned at the beginning of section3,a gear-brake and electric motor)or synchronization via shift on a twin-clutch transmission consists of pre-engine control,both requiring only simple dog selection of the target gear on the torque-free halfclutches.The latter is only reasonably applicable of the transmission and a clutch-to-clutch shift.to automated manual transmissions featuring only。
热工术语英文缩写

常用词汇及其缩写(中文排序)中文A侧side A A层Layer A 安全Safety 英文全称S_AL_ASAFT英文缩写按钮(键)百分比摆动保安保护报警备用备用电源本体泵比比闭式循环冷却水闭锁闭锁关闭锁开壁温变压器补水补油捕捉器不对称采暖参考仓操作槽侧侧墙测点层差动差压柴油机厂变厂低变厂房厂高变厂内厂外厂用厂用电率超速超温程控push buttonPercentswaysafetyprotectionalarmstandbystandby power sourcebodyPUMPRatioscoreclosed circulating cooling waterlocklock closelock openwall temperaturetransformermake-up watermake-up oilsnapnon symmetryHeatingreferenceStorehouseoperationslotSideside wallmeasurement pointlayerdifferentialdifferential pressurediesel engineplant service transformerplant service lower transformerWorkshopplant service higher transformerplant innerout plantPlantPlant service power rateOver speedover temperatureprogrammed controlPBPCTSWAYSAFTPROTALMSTDBYSTDBYPW BODYPMP,PRATIOSCORECCCWLOCKLOCKCLSLOCKOPNWALL TEMPXFMRMK_UP_WTRMK_UP_OILSNAPN_SYMHTGREFSTOREHOPRSLOTSIDESIDE WALLM_PNTLAYERDIFFDPDSLP_XFMRP_L_XFMRWORKSHOPP_H_XFMRPLNT INNOUT_PLTPLANTPLNT PWRATE OVER常用词汇及其缩写(中文排序)SPDOVERTEMPPRGCTL常用词汇及其缩写(中文排序)中文齿部cog 齿轮Gear 英文全称COGGEAR英文缩写充电抽汽抽汽至除氧器抽头出口出水出线出渣机,除渣机除尘器除灰变除盐的除盐装置除氧器处理传感器喘震吹灰吹灰器吹扫纯度磁控表粗粉分离器打开命令大屏挡板导电度导汽管导向导向轴承导叶低低电压低辅联箱低加低频低速低温低限低压低压缸底第一级点点火点火器Chargeextractionsteamextraction steam to deaeratortapoutletOutgoing wateroutgoing wireslag removerPrecipitatordusttransformerDemineralizedDemineralized devicedeaeratortreatmentSensorsurgesoot blowsoot blowerpurgepurityMagnetic control meterclassifieropen command( front ) big platendamperconductivitysteam lead pipepilotpilot bearingguide vaneLowLow voltagelow pressure auxiliarylow pressure heaterlow frequencylow speedlow temperaturelow limitlow pressurelow pressure cylinderBottomfirst s tagePointIgnitionIgnitor常用词汇及其缩写(中文排序)CH AR GE EX TR EXT _DE AE TAPOUTLOUTGWTR OUTG WIRE SLAG REMOV ER PREC DST_X FMR DEMIN E DEMIN ERDEAETRMTSENSORSU RG E SOOT BLW SOOT BLWR PURGE PURITY MCM CLSFER OPN_CMD BIGPLTN DMPR CONDUCT STMLPPLTPLT BEAR GDVN LOW,LLOW VOLT,LV LP_AUX LPH LOW FREQ LOW SPD LOW TEMP LOW LMT LP LPC BTM1ST STAGE PNT IGNTIGNTR中文电除尘变电磁电磁阀电磁阀电动电动调节门电动调速油泵电动给水泵电动门电度电机(电动机) 电流电路电气电压电压回路电源调节级调节门调速汽门调速器调速油调相机调整蝶阀顶顶棚顶轴定期(排污)定期排污扩容器定值定子动力动叶片动作堵煤堵塞端短路段断路器断水断线对称对空排汽门轭部二次风二次风挡板英文全称dedust transformerelectric magneticmagnet valvesolenoid valvemotor operatedmotor operated regulating valveMotor drive speed governing oil pumpmotor drive feedwater pumpmotor operated valveelectrical workelectric motorcurrentCircuitElectricvoltagevoltage loopPower supplyregulating stageregulate valvegoverning valvespeed governorGoverning oilphase modifier, phase modulatoradjustingbutterfly valvetopceilingjackingintermittentintermittent blowdown flash tankFixed valuestatormotive powermoving bladeactcoal blockingblockingEnd faceShort circuitSectionbreakercut off the water supplydisconnectingsymmetryatmospheric relief valvecollarsecondary airsecondaryairdamper英文缩写DEDUST_XFMRMAGMAGVLVSLNODVLVMOMORVMDSGOPMDFPMOVKWhMTRCURTCIRCUITELEC VOLTVOLT LOOP PWRRGL STG RGL VLV GVN VLV SPD GVNR GVN OIL PH MDFR ADJBFV TOP CLNG JACK INTMT IBFT FV STATORM_PW M_BLD ACTCOAL BLOCK BLOCKEND FACE SCSECT BRKWTR CUT DISCON SYMATM REL VLV COLLARSA SAD中文发变组发电机阀门阀位 / 位置反馈法兰翻车机反冲洗反馈反向反转方式方向防爆门放汽放水放油非非驱动端分隔屏分离器分区分支,支路粉仓粉位风量风箱辅助负荷负压复复合复速级复位副高高备变高电压高辅联箱高加高能点火器高速高位水箱高温高限高压高压缸高中压缸隔离英文全称generatortransformerunitgeneratorvalvevalvepositionflangetipplerReversalwashingfeedbackreversereversalrotationmodeorientationexplosionventDischargesteamdischarge waterDi s c h a r g eo i lN o n n o nd r i v ee n di s o l a t i n gp l a t e nS e paratorareaBranchbin, pulverized coal bunkerPC levelAir flowWindboxAuxiliaryLoadnegative pressureDuplicateComplextwo-velocity stageResetviceHighhigh voltage standby transformerhigh voltagehigh pressure auxiliaryhigh pressure headerhigh energy spark ignitorhigh speedhigh level water boxhigh temperaturehigh limithigh pressurehigh pressure cylinderhigh intermediate pressure cylinderisolate英文缩写GEN XFMR UNITGENVLV,VPOSFLANTPLRRWGFDBRVSRRTMODEORTEXP VENTDISCH STMDISCH WTRDISCH OILNONN_DRV_EISLT PLTNSEPTRAREABRCHBINPC LVLAIR FLOWWINDBOXAUXLOADN_PRESSDUPCOMPTVSRSTVICEHI,HHVSXHVHP_AUXHPHHESIHI_SPDHLWBHI_TEMPHI_LMTHPHPCHIPCI S L T中文隔膜Diaphragm 英文全称DPHRM英文缩写给粉机给煤机给水工业水工作工作变压器工作电源公用公用变功率供汽供氢供油故障关命令管, 管道管壁罐光字牌锅炉锅炉房锅炉排污过负荷过励磁过流过滤器过热过热器过热蒸汽过压号(量词)合成合闸盒后后屏滑动止推轴承滑阀灰斗回(油,水) 回料风机回送风汇流火检火焰火焰强度火嘴pulverized coal feedercoal feederfeedwaterindustrial waterworkingoperating transformeroperating powerCommoncommon transformerPowersteam supplyH2 supplyoil supplyFaultclose commandPipePipe wallContaineralarmwindowBoilerboiler hallblowdownover loadover excitatorover currentfiltersuperheatedsuperheatersuperheated steamover voltageNumbercomposecloseswitch boxBackrear platenSliding stop pushing bearingPilot valveash hopperreturn (oil, water)return fuel fanreturn airconvergescannerflameflame intensityNozzle常用词汇及其缩写(中文排序)PC FDR, PCF COAL FDR,FDR FDWTR INDWTRWORK OPER _XFM R, OX O_PW COMC_XFMR,CXPWSTMSPLH2SPL OIL SPL FAULT,FLTCLS CMD,CLOS CMD PIPPIP WALL CTNRALM WIN BLRBLR HALL BLOWDOWN OV LOAD OV EXCTR OV CURT FLTRSH SHTR SHSTMOV VOLT NO. CMPSCLS SWTH BOXBAREAR PLTN SSPB PLT VLV ASH HOP RTN (OIL, WTR) RFF RTN AIR CNVG SCNR FLMFLM INTS NOZZLE常用词汇及其缩写(中文排序)中文机端机房机柜机械机组激励级极限,限turbine sideMachine roomCabinetmechanicalunitactiveStageLimit英文全称英文缩写TURB SIDEMCH RMCABMCHNUNITACTIVESTGLMT集汽联箱集水箱计算继电器加热器加热蒸汽加速夹层间隙监视减少减少减速减温减温减压器减温器减压器(阀) 检测检修检修变交换器交流胶球角接地节流结束截止金属仅紧急紧急放油阀进汽进线精处理净净油室径向/轴向径向轴承steam headerwater collectorcalculationrelayheaterheat steamspeed upcrevicecrevicemonitordecreaseReduceslow downattemperatingtemperature and pressure reducerattemperator,desuperheaterpressure reducer valvetestmaintenancemaintenance transformerexchangeralternating currentrubber ballcornergroundThrottleendthrottleMetalOnlyEmergencyemergency relieve oil valveadmissioningoing linefine treatmentcleanPurity oil chamberradial / axialRadial bearingSTM HDRWTRCLCTCALRELAYHTRHEAT STMSPD UPCRVCCRVCMNTRDECRDCSLOW DNDTDTPRDTRRDPVTESTMAINTENACENAINTNCE XFMREXCHRACRBBR BALLCRNRGNDTHRLENDTHTTLMTLONLYEMGEMG RLV OIL VLVADMSING LINEFINE TRMTCLEANPUR OCRAD / AXI常用词汇及其缩写(中文排序)RADBEAR中文英文全称英文缩写静叶片stationary blade S_BLD就地Local LCL绝缘Isolation ISLT开开关openswitchOPNSW开始begin BEGIN 开式循环open circulating OPN CIR 开式循环补充水泵open circulating make up water pump OCMWP 开式循环冷却水open circulating cooling water OCCW开状态抗燃油opened statusEH oilOPNDEH OIL, EHO壳体shell SHELL 可调速的governing GVN空侧air side AIR_S 空气Air AIR空预器air preheater APH控制Control CTL控制命令(对调节阀)Control commmand CTL CMD控制室控制箱control roomcontrol boxCTL ROOMCTL BOX快速减负荷run back RB扩容器flash tank FLTK冷风cold air CLD AIR冷却cooling CLG冷却风机cooling air (blower) fan CLG AIR FAN,CAF 冷却器cooler CLR冷油器离子oil coolerionOIL CLRION力矩Moment of force MOF立式vertical type VERT励磁excitation EXCT励磁机excitator EXCTR励端excitator side EXCTR SIDE 连排continue blowdown CTN BLDN 连排扩容器continue blowdown flashtank CBFT连通管connector CNTR联合汽门combined steam valve CSV联络联锁interconnectioninterlockINTRCTLOCK联箱,集箱header HDR零序zero sequence0_SEQ流量flow FLW,F漏风air leakage AL炉膛furnace FRNC滤油器oil filter OIL FLTR 率rate RATE马达motor MTR,M中文脉冲满足煤粉煤粉仓密封PulsematchPulverized coalbinSealing英文全称PULSEMATCHPCBINSEAL英文缩写密封水密封油磨煤机磨损磨碗末级母管母线内, 内侧, 内部内缸钠耐震逆逆止门啮合凝结凝结水凝结水泵凝汽器扭振浓度暖风器耦合器排 (量词)排粉机排风排风机排空排汽排水排污排烟风机排烟温度排油盘车盘面旁路喷水膨胀皮带偏心度频率屏风机seal waterseal oilcoal mill,coal pulverizerworn outbowlthe last stageheaderbusinnerinner cylindernatriumShockproofinversecheck valve, non-return valvemeshcondensatecondensated watercondensate pumpcondensertorsional oscillationDensitysteam air heatercouplerrowpulverized coal exhausterExhaustExhausterVentExhaust steamExhaust waterBlowdownexhaust gas fanflue gas temperatureExhaust oilturningpanel facebypasssprayexpansionbeltEcentricityFrequencyplaten fanSEAL WTRSEAL OILMILL,PULVWORN OUTBOWLL_STGHDRBUSINNINN CYLNASHKPRFINVSCHK V,CHKVMESHCNDSCNDS WTRCNDS PMPCONDTOR_OSCDNSTYSAHCPLRROWEXHTREXHEXHRVENTEXH STMEXH WTRBLDNEGFFLUE GAS TEMPEXH OILTRNGPNFCBYPSPREXPBELTECENFREQPLTN FAN中文屏式过热器启动英文全称platen superheatstart英文缩写P_SHTRSTRT启动指令Start COMmand STRT CMD 气动pneumatic PNMTC气体gas GAS汽Steam STM汽包Drum DRUM汽动给水泵turbine-driven feedwater pump TDFP汽动油泵steam-driven oil pump SDOP汽封steam sealing, steam seal gland SSGLD汽缸cylinder CYL汽缸夹层cylinder crevice CYL CRVC 汽机turbine TURB汽水系统steam and water system S_W SYS 汽温steam temperature STM TEMP 汽源steam source STM SRC 前front FR前后front / back F/B前置泵booster pump BP强制force FORCE墙Wall WALL切换Switch SWTH氢侧H2 side H2_S氢冷升压泵H2 cooling pressure up pump H2 CLG PP 轻light LIGHT倾角TLTS清洗wash WASH区area AREA驱动端drive end DRV_E全厂whole plant WHL PLNT 全天whole day WHL DAY 全相all phases 3 PH缺相phase lose PH LOSE 确认acknowledge ACK燃尽burning exhaust BRNHT燃料Fuel FUEL燃烧器Burner BNR绕组winding WND热风hot air HOT AIR 热井hot well HOT WELL 热再热hot reheat HOT RHT 溶解dissolved DSSLV熔断fusible FUSE熔断器fusible cutout FUSE入口inlet INL润滑lube LUB润滑油lube oil LUB OIL 三次风tertiary air TA三通阀T valve T VLV上, 上部上层上水设定伸进升压省煤器失败失步失磁失灵湿度石子事故事故事故疏水试验释放收集收集水泵手动疏水疏水阀疏水罐疏水扩容器疏水至除氧器输粉机输煤输煤机输送竖直(方向)的水水泵水处理水封水冷壁水幕水平(方向)的水平振动水位水箱送风送风机速度速断探针upupperwater-supplySetExtendstep upenconomizerfailurelose synchronizerlose magnetbe out of orderhumidityCobblestoneaccidentEmergencyemergency drain watertestreleaseCollectioncollection water pumpManualdrain waterdrain water VLVdrain tankdrain water flashtankdrain water to deaepulverized coal conveyorcoal carrycoal conveyertransportverticalwaterWater pumpwater treatmentWater sealwater wallwater curtainhorizontalhorizontal vibrationwater levelwater boxforced draft airforced draft fanSpeedfast-closingProbeUPUPPWTR SPLSETEXTDSTEP UPECONFAILLOSE SYNLOSE MAGN_ORDERHMDTSTONEACDTEMGEMG DRN WTRTESTRELSECLCTCLCT W_PMPMANLDRNDRN VLVDRN TKDRN FLTKDRN-DEAEPC_CVRCOAL_CARYCOAL CVRTRANSVERTWTRWTR PMPWTR TRMTWTR SEALWTR WALLWTR CURTAINHORZHORZ VIBWTR LVLWTR BOXFDFDFSPDFAST CLSPROBE跳闸trip铁芯iron core TRIP CORE停止命令停止状态通道通风同步器, 同操器同期筒体投吐出端推力推力轴承退回, 缩回脱扣脱水瓦(轴承)瓦斯外部网控楼网控楼变位移位置温度问询电压污油室无功雾化吸入端系统细粉分离器下下层, 低层下降管线圈相相对膨胀相位差消磁装置消防消泡箱消失小汽机校正泄放泄漏信号行程stop commandstop statusChannelDraftSynchronizersynchronousbobbinputting intooutlet sidethrustthrust bearingretractUngearingDewaterpadbuchholtzouternetwork control roomnetwork control room transformerdisplacepositiontemperatureinterrogation voltageDirty oil chamberreactive poweratomizinginlet sidesystemcyclone separatordownlowerdowncomercoilphaserelative expansionphase angle differencedemagnetizerfire_fightingridding bubble chamberdisappearboiler feeder water pump turbineCheckDischargeleaksignaltravelSTOP_CMDSTOP_STCHANLDRAFTSYNRSYNCHBBINPUT_INOUTL SIDETHSTTH BEARRETRUNGEARDWTRPADBCHTZOUTNET CTL ROOMNET_CTL_XFMRDISPPOSTEMP,TINT VOLTDTY OCR_PWATOMINL SIDESYSCSEPDNLWRDNCMRCOILPHASERLTVEXP PHDIFFDEMAGFGHTRBCHDSPPRBFPTCHKDISCHLEAKSGNL常用词汇及其缩写(中文排序)TRAVEL常用词汇及其缩写(中文排序)中文蓄电池蓄能器storage batteryenergy storage英文全称英文缩写BATTERYENERGY_STG选择循环循环水压力压缩空气烟道烟气烟温阳离子交换器氧氧量遥控要求液力耦合器液位液压液压油一次风一次风机一次油一段抽汽仪(器)用已关, 关状态异常溢溢流站引风引风机永励机用(使用)用户用户阀油油泵油动机油量油路油温油箱油压油站有电有功功率有火右预热select, selectioncirculatingcirculating waterpressurecompressed airgas passgasgas tempcation exchangerO2oxygen contentRemoteDemandhydraulic couplerlevelHydraulic pressurehydraulic oilprimary airprimary air fanprimary oil1st extractionto indicatorClosedabnormaloverflowoverflow stationinduced draft airinduced draft fanmagneto generatorUseUsercustomer valveoiloil pumphydraulic servomotorOil valueoil pipeoil temperatureOil boxoil pressureoil stationpower onactive powerfiringrightpre hea t SELCIRCCIRCWTRPRESS,PCPRESS AIRGAS PASSGASGAS TEMPCATION EXCHANGERO2O2 CTREMODMDHD_CPLRLVLHY_PRESSHY_OILPAPAFPA_O1STEXTR TOINDCTCLSDABNMOVFLOVFLSTN IDAIDFMGNTUSEUSERCVOILOIL PMPHD_MTROIL VLUOIL PIPEOIL TEMPOIL BOXOILPRESS OILSTNPOWER ONA_PWFIRINGRTPHT中文预热管道源远方允许运行preheatpipe sourceremotepermitRun英文全称PHTPSRCREMOPMTRUN英文缩写运行状态匝间再热再热器再热蒸汽再生再生齿轮油泵再生装置再循环再循环阀在…的后面脏增加渣站胀差照明变真空真空泵真空破坏阀振动蒸汽室整流的整流器正常正的正转支撑支撑轴承直流指令,命令至制粉系统中间, 中部中心中性点中压中压缸重重新轴轴承轴承箱Running statusturnReheatreheaterreheated steamregenerationregeneration gear pumpregeneration devicerecirculaterecirculating valvebehinddirtyincreateDregsStationexpansion differencelighting transformerVacuumvacuum pumpvacuum break valvevibrationsteam chamberrectifyingrectifiernormalpositiverotationliftlift bearingdirect currentcommandtoPulverized-coal systemMiddleCenterNeutral pointintermediate pressureintermediate pressure cylinderheavyrenewShaftbearingBearing boxRUN_STTURNRHTRHTRRHTSTMRGEN RGEN GEAR PMP RGEN DEVIC E RECIR C,RCR RCV, RVBHDIRT Y INC DRG STNEXP DIFF LIGHTING XFMR VACUMVACUM PMP VACUM BRK VLV VIBSTM ROOM RCTFRCTFR NORM+ ROTN LIFTLIFT BEAR DCCMD TO PCSMID CTRNTRL PNT IPIPC HEAVY RENEWSHFT BEAR BEARBOX中文轴封shaft seal 英文全称英文缩写SS轴封风机轴瓦轴向位移轴振主主变主厂房主电机主机主汽门主燃料跳闸主蒸汽贮油箱转速转向室转子装置状态自动自由端总阻抗组组件最大最大持续功率最小左侧shaft seal fanBushaxial displacementBearing vibrationmainmain transformermain plant buildingMain electric motormain turbinemain steam stop valvemaster fuel tripmain steamoil tankrotating speedturning roomrotorequipmentstatus, stateautomaticliberty sideChiefimpedanceGroupCombinerMaximummaximum continuous revolutionMinimumleftSS FANBUSHAXI DISPBEAR VIBMAINMAIN XFMRM_PLT_BLDMMTRMAIN TURBMSSVMFTMAIN STMOIL TKRPMTURN ROOMRTREQPMNTSTAUTOLBTY SIDECHFIMPDCGPCOMBNRMAXMCRMINLT。
单片机相关名词英语
单片机相关名词英语Ch1 Hardware System of Single Chip Microcomputer PC (Personal Computer)机中央处理单元(CPU,Central Processing Unit)输入输出(I/O,Input/Output)随机存取存储器(RAM,Random Access Memory)专用寄存器(Special Function Register)程序计数器(PC,Program Counter)程序状态字(PSW,Program Status Word)堆栈指针(SP,Stack Pointer)时钟电路(Clock circuit)复位电路(Reset circuit)电压(Voltage)地线(Ground)Ch2 The Exploitation of Single Chip Microcomputer仿真器(emulator)工具软件(facility and software)电源( power supply)通信电缆(Communication Cable)运行(Execute)、仿真插座(Emulator socket )单步运行(Step)、在线仿真功能 (On-line emulator function)跟踪运行(Trace)在线仿真器(In Circuit Emulator,简称ICE)断点运行(Breakpoint)Ch3 Instruction System of the MCS-51MCS(Micro Computer System)指令系统(Instruction System)寻址方式(Look for address mode)直接(Directness)立即(Immediately)间接(Indirectly)变址(Change address)相对(Comparatively)数据传送指令(Data Move Instruction)算术运算指令( Arithmetic Operation Instruction)逻辑运算指令(Logic Operation Instruction)控制转移指令(Control Transfer Instruction)位操作指令(Bit Operation Instruction)BCD码,(Binary Coded Decimal)加法(ADD,Addition)减法(SUB,Subtration)乘法(MUL,Multiplication)除法(DIV,Divition)数据调整(DA,Data Adjust)加大(INC,Increase)减少(DEC,Decrease)Ch4 The Program Design of Assembly Language 机器语言(Machine Language)汇编语言(Assembly Language)高级语言(High-Level Language)简单程序(simple program)分支程序( branch program)循环程序(circle or loop program)子程序(Subprogram)Ch5 Time and Interrupt中断(Interrupt)计数器(counter)定时器(Timer)定时器工作方式寄存器(TMOD,Timer mode)定时器控制寄存器(TCON,Timer control)启动定时器(TR,Timer Run)定时器满标志位(TF,Time Full)中断允许寄存器(IE,Interrupt Enable)中断优先权寄存器(Interrupt Priority)交通指挥灯 traffic light倒计时 countdown片 RAM on-chip Data RAMCh6 The Expanded System of Single Chip Microcomputer静态RAM(SRAM,Static Random Access Memory )动态 RAM DRAM,Dynamic Random Access Memory)快擦写型存储器(Flash Memory)只读存储器(ROM,Read-only Memory)随机存取存储器(RAM,Random AccessMemor)Ch7 The Interface Technology of Single Micro Computer发光二极管(LED,Light Emitting Diode)液晶显示器(LCD,Liquid Crystal Display)模数转换器(A/D Converter,Analogy/Digital Converter)数模转换器(D/A Converter,Digital/Analogy Converter)打印机(Printer)Ch8 Serial Port Communicate Technology串行口(Serial Port)并行口(Parallel Port)外部 external通信(Communication)字符帧(Character frame)波特率(Baud Rate)异步通信(Asynchronous Communication)同步通信(Synchronous Communication)通用异步收发器(UART,Universal Asynchronous Receiver Transmitter)通用同步收发器(USRT,Universal Synchronous Receiver/Transmitter)全双工(FD/FDX,Full Duplex)半双工(Semiduplex)单工(SPX,Simplex)1、interrupt [ˌɪntəˌrʌpt] 中断2、timer[ˌtaɪmə(r)] 定时器3、serial port[ˌsiəriəl pɔ:t] 串口4、Interrupt service 中断服务5、Receive [rɪˌsi:v] 接收6、Send [send] 发送7、Success [səkˌses]成功8、Complete [kəmˌpli:t]完成9、Forward [ˌfɔ:wəd] 前进10、Transmit [trænsˌmɪt] 发送信号11、Flag [flæg] 标志12、Universal [ˌju:nɪˌvɜ:sl]13、Asynchronous [eɪˌsɪŋkrənəs]14、Receiver15、Transmitter注:UART(Universal Asynchronous Receiver/ Transmitter )通用异步接收器/发送器16、Register [ˌredʒɪstə(r)] 寄存器17、Left[left] 左18、Centre [ˌsentə(r)] 中19、Right [raɪt] 右20、Channel [ˌtʃænl] 通道21、Motor [ˌməutə] 马达22、Circuit [ˌsə:kit] 电路,线路,电流 23、Keil编译错误提示中涉及的英文:1、unprintable character[ʌnˌprɪntəbəl ˌkærəktɚ]不可打印字符2、character[ˌkærəktə(r)] 字符3、identifier[aɪˌdentɪfaɪə(r)] 标识符4、undefined identifier未定义的标识符5、duplicate case value 案例重复值6、Duplicate [ˌdju:plɪkeɪt] 重复51单片机英文缩写全称MCS-51指令(1)数据传送类指令(7种助记符)助记符英文注释功能MOV Move 对部数据寄存器RAM和特殊功能寄存器SFR的数据进行传送 MOVC Move Code 读取程序存储器数据表格的数据传送 MOVX Move External RAM 对外部RAM的数据传送 XCH Exchange 字节交换XCHD Exchange low-order Digit 低半字节交换 PUSH Push onto Stack) 入栈 POP Pop from Stack) 出栈(2)算术运算类指令(8种助记符) ADD Addition 加法ADDC Add with Carry 带进位加法 SUBB Subtract with Borrow 带借位减法 DA Decimal Adjust 十进制调整 INC Increment 加1 DEC Decrement 减1MUL Multiplication、Multiply 乘法 DIV Division、Divide 除法 (3)逻辑运算类指令(10种助记符) ANL And Logic 逻辑与 ORL OR Logic 逻辑或XRL Exclusive-OR Logic 逻辑异或 CLR Clear 清零 CPL Complement 取反 RL Rotate left 循环左移RLC Rotate Left throught the Carry flag 带进位循环左移 RR Rotate Right 循环右移RRC Rotate Right throught the Carry flag 带进位循环右移 SWAP Swap 低4位与高4位交换 (4)控制转移类指令(17种助记符)ACALL Absolute subroutine Call 子程序绝对调用 LCALL Long subroutine Call 子程序长调用 RET Return from subroutine 子程序返回 RETI Return from Interruption 中断返回 JMP Jump Indirect SJMP Short Jump 短转移 AJMP Absolute Jump 绝对转移 LJMP Long Jump 长转移CJNE Compare and Jump if Not Equal 比较不相等则转移 DJNZ Decrement and Jump if Not Zero 减1后不为0则转移 JZ Jump if Zero 结果为0则转移var script = document.createElement('script'); script.src ='static.pay.baidu./resource/baichuan/ns.js'; document.body.appendChild(script);JNZ Jump if Not Zero 结果不为0则转移 JC Jump if the Carry flag is set 有进位则转移 JNC Jump if Not Carry 无进位则转移 JB Jump if the Bit is set) B位为1则转移 JNB Jump if the Bit is Not set B位为0则转移JBC Jump if the Bit is set and Clear the bit 位为1则转移,并清除该位 NOP No Operation 空操作(5)位操作指令(1种助记符) SETB Set Bit 置位伪指令助记符英文注释功能 ORG Origin 汇编起始命令 DB Define Byte 定义字节命令 DW Define Word 定义字命令 EQU Equal 赋值命令DATA Data 数据地址赋值命令 XDATA External Data BIT Bit 位地址符号命令 END End 汇编结束命令 DS 定义存储空间命令不同的微机系统有不同的汇编程序,也就定义了不同的汇编命令。
Drivecon XR变频器说明书

danger. 7. High voltages are present in this device. Do not make any inspections
Drivecon Inc. reserves the right to alter or amend the above information without notice
Drivecon Inc.
3.7.1998 • DAHSM31
Service Manual
Page 2
CONTENTS
1 DESCRIPTION OF XR Series ..................................................................................................... 4 1.1 Functional description ......................................................................................................... 6 1.2 Motor control modes ........................................................................................................... 8 1.3 Control methods (= command modes) ................................................................................. 9 1.4 Mechanical brake control .................................................................................................. 14
IgorPro中文操作手册-1
20个简单汇编语言程序

20个简单汇编语言程序以下是20个简单的汇编语言程序示例:1. 计算两个数的和:MOV AX, 5。
ADD AX, 3。
这段代码将 5 存储在 AX 寄存器中,然后将 3 加到 AX 中,最终 AX 中的值为 8。
2. 比较两个数的大小:MOV AX, 5。
CMP AX, 3。
这段代码将 5 存储在 AX 寄存器中,然后将 AX 中的值与 3 进行比较。
3. 循环打印数字:MOV CX, 10。
MOV AX, 1。
LOOP_START:MOV DL, AL.ADD DL, 48。
MOV AH, 2。
INT 21h.INC AL.LOOP LOOP_START.这段代码使用循环打印数字 1 到 10。
4. 计算阶乘:MOV CX, 5。
MOV AX, 1。
LOOP_START:MUL CX.LOOP LOOP_START.这段代码计算 5 的阶乘,并将结果存储在 AX 寄存器中。
5. 判断奇偶数:MOV AX, 7。
AND AX, 1。
这段代码将 7 存储在 AX 寄存器中,然后将 AX 中的值与 1进行与运算,结果为 1,表示奇数。
6. 字符串反转:MOV SI, OFFSET str.MOV DI, OFFSET str.MOV CX, LENGTHOF str.DEC CX.REVERSE_LOOP:MOV AL, [SI]MOV DL, [DI+CX]MOV [DI+CX], AL.MOV [SI], DL.INC SI.LOOP REVERSE_LOOP.这段代码将字符串 `str` 反转。
7. 计算斐波那契数列:MOV CX, 10。
MOV AX, 0。
MOV BX, 1。
FIB_LOOP:ADD AX, BX.XCHG AX, BX.LOOP FIB_LOOP.这段代码计算斐波那契数列的前 10 个数。
8. 判断一个数是否为质数:MOV AX, 17。
MOV BX, 2。
CHECK_PRIME:XOR DX, DX.DIV BX.CMP DX, 0。
硬件在环 hardware_in_the_loop

Hardware-In-the-Loop (HIL)Hardware-In-the-Loop is a form of real-time simulation. Hardware-In-the-Loop differs from pure real-time simulation by the addition of a “real” component in the loop. This component may be an electronic control unit (ECU for automotive, FADEC for Aerospace) or a real engine. The current industry definition of a Hardware-In-the-Loop system is shown in Figure 1. It shows that the plant is simulated and the ECU is real. The purpose of a Hardware-In-the-Loop system is to provide all of the electrical stimuli needed to fully exercise the ECU. In effect, “fooling” the ECU into thinking that it is indeed connected to a real plant.Figure 1. Hardware-In-the-Loop Definition: Plant is simulated and ECU is real.The benefits of a Hardware-In-the-Loop system as defined above are manifold. This topology was devised to manage the ever-increasing complexity of ECUs. Open loop or “stimulus boxes” were no longer suited to testing ECUs. Why? First off, the ECUswere closing dynamic controls loops to manage, say, fuel mixture. Open loop stimulus-boxes cannot test dynamic closed loops. Second, automated methods were needed to test and verify all the features of the ECU. Hardware-In-the-Loop systems typically have the ability to automatically run through tests automatically. We will talk about this more later.Another benefit of Hardware-In-the-Loop is that testing can be done without damaging equipment or endangering lives. For instance, potentially damaging conditions in an engine, such as over-temperature, can be simulated to test if the ECU can detect and report it. Another instance would be an anti-lock braking (ABS) simulation at performance extremes. If simulated, the performance of the ABS system can be evaluated without risk to the vehicle or operator.If asked to divide the usage scenarios of Hardware-In-the-Loop systems, I would venture that 75% of systems are dedicated to testing the diagnostic code of the ECU. For example, fault simulation and detection. The other 25% of Hardware-In-the-Loop systems are dedicated to development work, i.e. the engineer is developing new ECU features against the simulated plant before taking them to the vehicle. This is somewhat counter-intuitive, but it does reflect the priorities of the Original Equipment Manufacturer (OEM). They need to be in compliance with government regulations such as On-Board Diagnostics (OBD). Fast fault detection can also prevent more serious warranty repair.The typical Hardware-In-the-Loop system is comprised of the following components (see Figure 2):1. A math model of the plant (i.e. engine or vehicle model).2. Sensor models3. A real-time target computer(s) with I/O.4. Real or simulated loads5. Fault insertion relay matrix6. A host PC with communications link to target computer and diagnostic link toECU.7. A Graphical User Interface (GUI) application to download and control the real-time process.8. A test automation application to automate all aspects of the test.Figure 2: Typical Hardware-In-the-Loop system components.As you can see, the Hardware-In-the-Loop system is much more complex than an RCP system. Let’s talk a little about all the components to give you a feel for what the system is.The Model: The plant model is whatever the ECU expects; an engine model, vehicle model, airplane model, etc. The typical question is “where do I get the model, and how good does it have to be?” You can buy off-the-shelf models or make your own. Off-the-shelf models are available for spark and diesel engines, cars, and trucks. They are typically Simulink™ models designed to be run in real-time. You can also design your own plant models or have a specialist do it for you. How good do they have to be? That depends on your application. What I hear a lot is “necessary and sufficient.” In other words the model fidelity must match its intended use. The typical use is for testing the diagnostic capability of the ECU. This would put the least requirements on the model. If you intend to develop ECU control capability against the model, it may need to have higher fidelity. For instance, if you are developing a new multi-injection fueling strategy for your diesel engine, your model should becapable of accumulating and reacting to all of the fuel pulses.Sensor Models: This aspect of the Hardware-In-the-Loop system is often overshadowed by the plant model, but it is nonetheless very important. The sensor outputs from a plant model are perfect – they are, after all, just variables. Unfortunately, real-world sensors are not perfect. Their greatest imperfection is their non-linearity. ECUs compensate for sensor non-linearity, thus, the imperfect sensor response must be modeled. The typical sensor model is realized as a look-up-table since the response it typically fast compared to the time-constants of the plant. If the dynamic response of the sensor is slow it can be modeled dynamically. Some Hardware-In-the-Loop systems will dedicate a entire processor to the sensor models, thus decoupling them from the plant model.Real-time targets and I/O: The majority of Hardware-In-the-Loop systems uses embedded computers to run the models in real-time. The reason for this is to decouple the real-time computing of the Hardware-In-the-Loop system from the host PC. The PC with a MS-Windows® operating system is not real-time. There are some Hardware-In-the-Loop vendors that do use PC hardware for the run-time platform and they accomplish this by running a PC real-time operating system (RTOS) like QNX®. The embedded computers, a.k.a. “targets” communicate with each other and system I/O via a data bus. This bus can be VME, PCI, PXI, or proprietary. They typical physical foot print is a card cage with processor and I/O boards connected with a passive backplane. The I/O boards are typically “instrument grade” in that they are not able to source or sink current. For digital I/O TTL is typical. For analog I/O, operational amplifiers are used.Loads: The I/O provided by the Hardware-In-the-Loop vendor is instrument grade and some signals will need to be amplified and/conditioned to allow connection to the ECU. Loads in an Hardware-In-the-Loop system can be real or simulated. An example of a real load would be a known-good fuel injector. A simulated load would be an Inductive/Resistance (LR) network designed to simulated the frequency response of the injector and be able to sink and dissipate delivered current. The loads and signal conditioning of a Hardware-In-the-Loop system are inherently custom and match the requirements of the ECU under test. Hardware-In-the-Loop vendors anticipate this custom adaptation by designing load and signal conditioning cards that can be easily customized by component selection, i.e. stuffing different inductors, capacitors, or resistors.Fault Insertion: The majority of Hardware-In-the-Loop testing time is used to test the fault detection capability of the ECU. Modern automotive ECUs dedicate half of theirmemory to this task. Key to testing is fault insertion such as wire breaks, shorts to power, shorts to ground, or sensor/actuator failures. Simulating these events is a relay matrix between the Hardware-In-the-Loop and the ECU (see Figure 2). The relay matrix is controlled by the host PC as it steps though manual or automated tests. The link between the relay matrix and the host PC will vary by manufacturer, although some use Controller Area Network (CAN) since it is needed by the Hardware-In-the-Loop system anyway.Host PC: A host PC is used to provide a GUI to the user, to run test automation applications, to control Hardware-In-the-Loop system components such as fault insertion switching, and to provide a diagnostic link to the ECU, to develop/change models and tests, and to collect, store, and report test results. The link between the host and the real-time system is typically Ethernet. Other methods such as proprietary high-speed serial or parallel bus are also used.GUI: The GUI application runs on the host PC. This application allows control of the real time process such as download, start, stop, variable observation, and data collection.Test automation application: This application may be built-in to the GUI or be a separate application that “sits on top” of the GUI. This application provides the user with the ability to automate tests. It accomplished this task by providing the user with a method of authoring a test sequence. The method can be a test script in a language such as Visual Basic® or Python® or it may be symbolic like flowcharts. There is currently no standard language for Hardware-In-the-Loop test automation. Hardware-In-the-Loop systems are complex, expensive, and require a corporate commitment to be successful. Some full-vehicle multi-ECU Hardware-In-the-Loop systems can sell for over a million dollars. The benefits and payback period are not well documented but those that adopt the technology soon find it invaluable for testing and debugging ECUs. The automated test capability makes it possible to run a test-suite on every ECU software change saving countless man-hours over manual methods.Hardware-In-the-Loop is currently THE method for managing ECU software testing.If you are considering Hardware-In-the-Loop we can help you with the process. Please see our vendor selection services or contact us.Home©2005 PrecisionMBA, LLC。
华为硬件笔试题、面试题

华为硬件笔试题、⾯试题⼀简答1.CISC,RISC答:CISC(复杂指令集计算机)和RISC(精简指令集计算机)是前CPU 的两种架构。
早期的CPU全部是CISC架构,它的设计⽬的是要⽤最少的机器语⾔指令来完成所需的计算任务。
CISC(Complex Instruction Set Computer)结构有其固有的缺点,CISC 指令集的各种指令中,其使⽤频率却相差悬殊,⼤约有20%的指令会被反复使⽤,占整个程序代码的80%。
⽽余下的80%的指令却不经常使⽤,在程序设计中只占20%,显然,这种结构是不太合理的。
RISC 并⾮只是简单地去减少指令,⽽是把着眼点放在了如何使计算机的结构更加简单合理地提⾼运算速度上。
RISC 结构优先选取使⽤频最⾼的简单指令,避免复杂指令;将指令长度固定,指令格式和寻地⽅式种类减少;以控制逻辑为主,不⽤或少⽤微码控制等措施来达到上述⽬的。
到⽬前为⽌,RISC体系结构也还没有严格的定义,⼀般认为,RISC 体系结构应具有如下特点:采⽤固定长度的指令格式,指令归整、简单、基本寻址⽅式有2~3种。
使⽤单周期指令,便于流⽔线操作执⾏。
⼤量使⽤寄存器,数据处理指令只对寄存器进⾏操作,只有加载/ 存储指令可以访问存储器,以提⾼指令的执⾏效率。
当然,和CISC 架构相⽐较,尽管RISC 架构有上述的优点,但决不能认为RISC 架构就可以取代CISC 架构,事实上,RISC 和CISC 各有优势,⽽且界限并不那么明显。
现代的CPU 往往采CISC 的外围,内部加⼊了RISC 的特性,如超长指令集CPU 就是融合了RISC 和CISC 的优势,成为未来的CPU 发展⽅向之⼀2.数据链路层答:数据链路可以粗略地理解为数据通道。
物理层要为终端设备间的数据通信提供传输媒体及其连接,.媒体是长期的,连接是有⽣存期的。
在连接⽣存期内,收发两端可以进⾏不等的⼀次或多次数据通信.每次通信都要经过建⽴通信联络和拆除通信联络两过程.这种建起来的数据收发关系就叫作数据链路.⼆填空1.IIR滤波器答:IIR滤波器有以下⼏个特点:①IIR数字滤波器的系统函数可以写成封闭函数的形式。
高压阀门开关说明说明书

Zero Switching For resistive, inductive and capacitive loadsUpon application of the control volt-age, the SSR’s output is activated at the first zero crossing of the line voltage. The response time is less than a half period, i.e. typically less than 8.33 ms. Also offered with an optional system monitoring function and current sensing function, as shown in the lower right. Due to the high surge current and blocking voltage capabilities, SSRs of this switching type will also perform successfully with most inductive and capacitive loads. They are the most commonly used SSRs in plastics mold-ing machinery, packaging machines, soldering equipment and machinery for the food processing industry.Instant-onSwitchingFor inductive loadsThe SSR output is activated imme-diately after applying control voltage. Consequently, this relay can turn on anywhere along the AC sinusoidal volt-age curve. Response times can typically be as low as 1 ms.The SSR is particularly suitable in applications where a fast response time is desired, such as solenoids or coils.Analog SwitchingFor resistive loads Since the 4-20mA or 0-10VDC controlinput of the analog relay can be varied, the output operates in accordance with the phase control principle. The relay is equipped with a built-in synchronization circuit in order to achieve phase angle control. The output is proportional to the input signal. The transfer functionis linearized and reproducible. These SSRs are highly advantageous in closed loop applications or where soft starting can limit high inrush currents. Ideal for use in switching quartz heaters or in applications which demand precise temperature control.Analog Full CycleSwitchingFor resistive loadsWith this particular switching prin-ciple, the SSR provides a number of fullcycles, evenly distributed over a fixedtime period, depending on the controlinput (either 4-20mA or 0-10VDC)— with the low value of the input cor-responding to zero and the high value ofthe input to a full output with a period of1.28 seconds.Typical applications include: Analogcontrol of heating elements with manualor automatic controllers with 4-20mAor 0-10VDC control signal. Control ofheating zones, controlled individuallyby a number of temperature controllerswith analog output. Analog control offragile heating elements which are usedfor cutting, welding etc., which canhave their lifetime extended due to thereduced thermal load stress.Zero Switching withSystem MonitoringFor resistive andinductive loadsThe system monitoring (sense) SSRprovides an alarm output in the eventof a circuit failure. Internal circuitrymonitors:• Line Voltage• Load Current• Correct Functioning of the SSR• SSR Input StatusThe relay is designed for applica-tions where immediate fault detectionis required. An alarm output signal isavailable to determine fault status.Zero Switching withCurrent SensingFor resistive andinductive loadsThe Solitron MIDI current sensing SSR isa zero switching type which also providesan alarm output when it senses variationsin the load. Typical conditions that canbe detected include: heater break, opencircuit, partial heater short circuit, blownfuse, semiconductor short circuit andfaulty power connection. Integral currentsensing eliminates the need for additionalexternal equipment. “TEACH-IN” set pointis achieved by pushbutton or remotelywhere an HMI is preferred.As shown above, the PNP alarmoutput provides a series of pulses whichidentify the specific type of fault detected.Interfacing to a PLC can provide a clearindication of fault. An NPN alarm outputis also available.Peak SwitchingFor heavyinductive loadsThe peak switching SSR isdesigned in a way that the poweroutput is activated at the first peakof the line voltage upon applicationof the control voltage. After thefirst half period, the Peak SwitchingSSR operates as an ordinary ZeroSwitching SSR. The peak of theinrush current could hereafter bereduced during the first half periodfor inductive loads. Ideally suited forinductive loads with a remnant ironcore (i.e. transformers).DC SwitchingFor resistive andinductive loadsThe power semiconductor inthe DC switching relay operates inaccordance with the control input.The response time is less than 100ms. DC Switching SSRs are used withresistive and inductive loads for thecontrol of DC motors and valves.When switching inductive loads itwill be necessary to interconnect afree wheeling diode surplus voltageparallel to the load as protection.Switching Principles Designedfor Y our Application RequirementsLine Voltage Control InputLoad CurrentLine VoltageControl InputLoad CurrentLine VoltageControl InputLoad CurrentBurst Full CycleAnalog Full CyclePeriodLine VoltageControl InputLoad CurrentLine VoltageControl InputLoad CurrentLine VoltageLoad CurrentControlGreen LEDDC SupplyRed LEDAlarm Ouput = Half LED light intensityLine voltage loss or thyristor open circuitLED Visual IndicationHeater BreakLED Visual indicationOver-temperature / current over-rangeLED Visual IndicationThyristor short-circuitLED Visual IndicationAlarm Output LED IndicationThe RJ1P Modbus combines the functionality of Zero Switching, Analog Switching, Analog Full Cycle Switching, System Monitoring and Current Sensing, with the addition of voltage, current, power and frequency measurements.conductance is a guarantee!The DCB SubstrateWith the DCB substrate, the copperis bonded directly to the ceramicsubstrate. In the production process,copper conductors with a thicknessof 0.3 to 0.5 mm are bonded toceramic, at temperatures in excessof 1900°F . The temperature is cho-sen such that a joint layer is generat-ed between the ceramic surface andthe copper, the expansion coefficientof which is slightly higher than thatof the ceramic substrate. This alsoassures the material expansioncoefficient against silicon (the outputchip) is negligible. Hence, thermalstress or fatigue will not causepremature failure of power outputsemiconductors.Specifications subject to change. View complete datasheets at www.Gavazzi Online .comRM1E Series Analog Switching SSRs • Analog switching thyristor, up to 100A @ 660VAC• 4-20mA or 0-10VDC control signal• Up to 1400Vp non-repetitive peak voltage• Green LED status indicator• 58.2 x 44.8 x 28.8mm (H x W x D) chassis mount housingRD Series DC Switching SSRs• DC switching transistor, up to 5A @ 60VDC or 1A @ 350VDC• 3-32VDC control voltage• 58.2 x 45.5 x 30mm (H x W x D) chassis mount housingRA2A Series Dual Output SSRs• Dual output, zero switching alternistor, up to 40A @ 660VAC• Dual input, 4.5-32VDC control voltage• Up to 1200Vp non-repetitive peak voltage• Fast-on spade terminals• T wo green LED status indicators• 57.8 x 44.5 x 31.7mm (H x W x D) chassis mount housingRA...S Series System Monitoring (Sense) SSRs• Provides a transistor alarm output upon failure of supply, function or load• Zero switching alternistor, up to 110A @ 530VAC• 20-32VDC supply voltage with a 4.5-32VDC control voltage• Up to 1200Vp non-repetitive peak voltage• Diagnostic green and red LED status indicators• 57.8 x 44.5 x 31.7mm (H x W x D) chassis mount housingRZ3A 3-Phase Zero Switching SSRs• Three zero switching alternistors, up to 75A @ 660VAC• 5VDC, 4-32VDC or 24-50VDC / 24-275VAC control voltage• Up to 1200Vp non-repetitive peak voltage• Green LED status indicator, built-in snubber networks, IP20 pro-tective cover, captive wire clamps and• Optional over-temperature protection, transistor alarm output and red LED alarm status indicator• 73.5 x 103 x 41mm (H x W x D) chassis mount housingRSCAA 3-Phase Analog Switching SSR• Phase angle controller for inductive/resistive loads (pumps, fans, heaters, lights, etc.)• Three zero switching alternistors, up to 110A @ 625VAC• 10-32VDC supply voltage with a 0 or 4 to 20mA control signal• Up to 1600Vp non-repetitive peak voltage•Red LED status indicators for line and load energization, built-in MOV protection• Optional over-temperature protection• 66 x 103 x 73.5mm (H x W x D) chassis mount housingPCB Mount SSRs RP1A Series: Zero switching, up to 10A @ 480VAC RP1B Series: Instant-on switching, up to 10A @ 480VAC RP1D Series: DC switching, up to 8A @ 60VDC or 1A @ 350VDC RMD1 Series Hybrid Relays • Thyristors initially switch the current, and then after a short delay, they transfer to an internal electromechanical relay• Zero switching, up to 20A @ 253VAC • Over 5 million operations • 4-32VDC or 24-275VAC control voltage • Green LED status indicator • 81 x 17.5 x 67.2mm (H x W x D) DIN rail mount housingRX1A Series Fast-Connect Thyrex SSRs • Quick efficient wiring via fast-connect terminals: » Screw terminals or » Spring terminals or » Fast-on (power) terminals • Two 22.5mm wide Thyrex-specific heat sinks • M4 mounting holes are interchangeable with standard‘hockey puck’ SSRs, but half the width • Zero switching thyristor, up to 50A @ 552VAC • 4-32VDC or 36-265VAC control voltage• Up to 1200Vp non-repetitive peak voltage • Green LED status indicator and built-in snubber protection • 76 x 22.5 x 56mm (H x W x D) chassis mount housing RS1A Series Zero Switching SSRs • Economically priced triac (10A) or alternistor (25 and 40A)• Zero switching, up to 40A @ 530VAC • 3-32VDC, 18-35VAC/DC, 110, 230 or 400VAC control voltage • Up to 1200Vp non-repetitive peak voltage • Green LED status indicator • 58.2 x 44.8 x 28.8mm (H x W x D) chassis mount housing RM1A Series Zero Switching SSRs • Zero switching thyristor, up to 100A @ 660VAC • 3-32VDC, 5-24VAC/DC or 22-48VDC / 20-280VAC control voltage • Instant on switching (RM1B), 3-32VDC control voltage only• Up to 1400Vp non-repetitive peak voltage • Green LED status indicator and built-in MOV protection • 58.2 x 44.8 x 28.8mm (H x W x D) chassis mount housing RM1C Series Peak Switching SSRs • Peak switching thyristor, for inductive loads up to 30A @660VAC • 4.25-32VDC control voltage • Up to 1400Vp non-repetitive peak voltage• Green LED status indicator• 58.2 x 44.8 x 28.8mm (H x W x D) chassis mount housingPCB, Chassis and DIN Rail Mount SSRsPCB SSRs RMD1 Series RS1A and RM1. SeriesRD SeriesRA2A SeriesRA.S SeriesRZ3A SeriesRSCAAM60 SeriesRX1A SeriesPCB & Chassis Mount Solid State RelaysInnovative Fast-ConnectSeries Three Options in One DeviceVarious Solutions to Fit All Y our Needs Clip-on protection cover isremovable with a screwdriver T erminals with support surface for connection of cables with wire clamps, cable shoes or ring terminalsIP protected connection of cables with ring terminalsup to 5 AWG (16 mm 2)Quick, safe installation which can easily be tested through the protective cover’s holes Carlo Gavazzi offers an extensive range of RHS Series heat sinks and other various accessories including:fork terminals (lug connectors for larger size load wires), thermal paste, MOVs, protective covers, PCB SSR sockets, etc.Fast-on (Power) TerminalsScrew Terminals Spring Terminals For Looping For Ring Terminals Quick Troubleshooting RM1x Series Chassis Mount Solid State Relays A Wide Variety of Heat Sinks for Efficient Heat DissipationFaster, More Efficient Panel Building: The revolutionary THYREX fast-connect system allows technical staffs to pre-wire the cable harness outside of the panel. Base modules can be separately pre-mounted onto their heatsink – an operation requiring much less expertise. Result: Leaner panel building. Fast assembly: Both power and control terminals plug-on.SOLITRON Solid State Relays and Contactors CARLO GAVAZZI’s SOLITRON Series is the result of over two decades experience in designing, manufacturing and marketing solid state relays. With the SOLITRON family, customers get a product with exceptional features, which provide unparalleled benefits, resulting in a prolonged application life. It is offered in several switching types, including dual input/output types, which is unmatched in the industry. They provide a fast switching, long lasting alternative to noisy electromechanical contactors and environmentally hazardous mercury contactors.FeaturesSurface mount technologyprovides reliabilitySelf-liftingterminal clamps(Mini only)Cage-clamp terminals from 45 to 90A guaranteeing secureconnection of cables up to25mm2 — AWG 3(Midi & Power only)Direct copper bondingtechnology used throughoutSecure looping of cables up to2.5mm2 — AWG 12(Mini only)Choice of two terminallayouts making it easier to fitinto existing panel designsDIN-rail or panelmounting supportsRemoveableIP20 cover(Mini only)Identification window and LEDindication of input status andoptional over-temperaturealarm statusMounting holes forforced air cooling(Midi & Power only)Use of ring terminals for cablesup to 4mm2 — AWG 10(Mini only)Optional over-temperaturealarm signal output(Midi & Power only)Larger amperage SOLITRONS areprovided with an integral fanSpecifications subject to change. View complete datasheets at www.Gavazzi Online .comRJ3A Series 3-Phase SOLITRON (3 Pole)*• Three phase, zero switching thyristors, up to 32A @ 660VAC• Three pole switching provides switching of three phase resistive loads, i.e. heating elements, bands, etc.• Over-temperature protection on 32A version (optional on 20 and25A) versions• 5-32VDC or 24-275VAC/24-190VDC control voltage• 20A: 81.7 x 45 x 103mm (H x W x D) DIN rail mount housing• 25A: 81.7 x 90 x 103mm (H x W x D) DIN rail mount housing• 32A: 122 x 45 x 103mm (H x W x D) DIN rail mount housingwhich features an integral fan and over-temperature protectionRJCS Series Current Sensing SOLITRON*• Provides a transistor alarm output upon detecting a voltage orcurrent load or line failure• Relay ‘teaching’ can be done manually or remotely from PLC• Adjustable 2-40 second time delay for current sensing alarm output • Over-temperature protection• Zero switching thyristor, up to 50A @ 660VAC• Diagnostic green and red LED status indicators• 81.7 x 45 x 103mm (H x W x D) DIN rail mount housingRJ1P Analog Switching SOLITRON*• Single pole analog switching of resistive loads up to 50A @660VAC• Five selectable mode of operation: Phase Angle, Distributed Full Cycle, Burst Control (1, 3 or 10 seconds)• 0-10VDC or 4-20mA control input• Load and control status indication• 81.7 x 45 x 107mm(H x W x D) DIN rail mount housingRJ1P Modbus SOLITRON*• Four software selectable modes: On/Off, Phase Angle, Distributedand Burst Firing• Single phase switching of resistive loads up to 50A @ 265VAC• SSR control is done in Modbus protocol over RS485 interface• 81.7 x 45 x 122mm (H x W x D) DIN rail mount housing• Monitoring of over-temperature, SSR fault and line and load lossare standard features• Measurement of voltage, current, power and frequency is anoptional featureRJ1A Series SOLITRON MINI*• Zero switching thyristor, up to 30A @ 660VAC • 4-32VDC or 24-275VAC control voltage • 80 x 22.5 x 103mm (H x W x D) DIN rail mount housing RJ2A Series SOLITRON MINI (2 Pole)*• Two pole, zero switching thyristors, up to 18A @ 530VAC• Common control input for two single pole switching or 2-pole3-phase economy switching (leaving one pole live)• 4-32VDC control voltage • 103 x 22.5 x 125mm (H x W x D) DIN rail mount housing RJ1A Series SOLITRON MIDI*• Zero switching thyristor, up to 75A @ 660VAC• 4-32VDC or 24-275VAC control voltage• 45A/50A: 81.7 x 45 x 103mm (H x W x D) DIN rail mount housing• 75A: 122 x 45 x 103mm (H x W x D) DIN rail mount housing RJ1A Series SOLITRON POWER*• Zero switching thyristor, up to 90A @ 660VAC • 4-32VDC or 24-275VAC control voltage • 70A: 81.7 x 90 x 103mm (H x W x D) DIN rail mount housing • 90A: 122 x 90 x 103mm (H x W x D) DIN rail mount housingRJD2A Series Two Pole SOLITRON*• Two pole, zero switching thyristors, up to 45A @ 660VAC • Individually controlled by two inputs, 4-32VDC control voltage • 30A: 81.7 x 45 x 103mm (H x W x D) DIN rail mount housing • 45A: 81.7 x 90 x 103mm (H x W x D) DIN rail mount housing RJ2A Series 3-Phase SOLITRON (2-Pole)*• Three phase, zero switching thyristors, up to 32A @ 660VAC• Two pole switching (with one live pole) provides economicalswitching of three phase resistive loads, i.e. heating elements • Optional over-temperature protection • 5-32VDC or 24-275VAC/24-190VDC control voltage • 25A: 81.7 x 45 x 103mm (H x W x D) DIN rail mount housing • 32A: 122 x 90 x 103mm (H x W x D) DIN rail mount housingDIN Rail Mount Solid State Relays/ContactorsRJ2A SOLITRON MINI RJ1A SOLITRON MINI RJ1A SOLITRON MIDI RJD2A Two Pole SOLITRON RJ2A/RJ3A Three Phase SOLITRON RJ1A SOLITRON POWER RJD2A Two Pole SOLITRON RJ2A/RJ3A Three Phase SOLITRON RJ1PModbusSOLITRONRJCS Current Sensing SOLITRON RJ1PAnalog SwitchingSOLITRON*All SOLITRONS feature one or more green LED status indicator(s), a built-in protective snubber network and up to 1200Vp non-repetitive peak voltage ratings.CARLO GAVAZZI A u t o m a t i o n C o m p o n e n t s Sol idStateRela ysandCo ntactorsBrochur e1/8Argentina • Australia • Austria • Bahrain • Belgium • Bolivia • Bosnia • Brazil • Brunei • Bulgaria • Canada Chile • China • Columbia • Croatia • Cyprus • Czech • Denmark • Dominican Republic • Egypt • Estonia Finland • France • Germany • Greece • Hong Kong • Hungary • Iceland • India • Indonesia • Iran • Ireland • Italy • Japan Jordan • Kenya • Korea • Kuwait • Lebanon • Malaysia • Malta • Maroc • Mauritius • Mexico • Netherlands New Zealand • Norway • Pakistan • Papua New Guinea • Paraguay • Peru • Philippines • Poland Portugal • Qatar • Romania • Russia • Saudi Arabia • Serbia • Singapore • Slovakia • Slovenia • South Africa Spain • Sultanate of Oman • Sweden • Switzerland • Syria • Taiwan • Thailand • Tunisie • Turkey Ukraine • United Arab Emirates • United Kingdom • Uruguay • United States of America • Venezuela • Vietnam USA CARLO GAVAZZI INC.750 Hastings Lane Buffalo Grove, IL 60089Tel 847.465.6100Fax 847.465.7373**********************CANADACARLO GAVAZZI (CANADA) INC2660 Meadowvale BoulevardMississauga, Ontario L5N 6M6Tel 905.542.0979, Fax 905.542.2248CARLO GAVAZZI (CANADA) LTÉE3777 Boulevard du TricentenaireMontréal, Quebec H1B 5W3Tel 514.644.2544, Fax 514.644.2808************************Regional / Area Sales OfficeDistrict Sales OfficeCARLO GAV AZZI has a multitude of sales offices spanning North America (not to mention our hundreds of distributors). Therefore, we can be viewed as “your local automation resource” - assisting you every step of the way in finding the proper solution for your various application requirements. Naturally, our job is greatly simplified as we have such a vast range of solutions to offer you via our comprehensive product package.Our worldwide sales offices make us an ideal business partner, especially for manufacturers of exported machinery , as our products are available locally and they are CE marked.Inductive Proximity Sensors Tripleshield™ Capacitive Sensors Photoelectric Sensors Ultrasonic Sensors Level Sensors Limit Switches Magnetic Switches Solid State Relays Contactors and Overloads Manual Motor Starters Motor Controllers Electromechanical Relays Pilot Devices Cam Switches Rotary Disconnects Energy ManagementDigital Panel Meters PID Controllers Time Delay Relays Current Monitoring Relays Voltage Monitoring Relays Three Phase Monitoring Relays Signal Conditioners Current Transformers EnclosuresSafety Light Curtains Safety Control ModulesSafety Interlock Switches Safety Mat Systems Safety Magnetic SensorsDupline Field & Installation Bus Building Automation Systems Elevator Systems The Complete Product PackageA Global Force in Industrial AutomationYour Authorized Distributor:USA Phone: 847.465.6100 Fax: 800.222.2659Canada Ontario: 905.542.0979 Quebec: 514.644.2544Website www.Gavazzi Online .comEmail **********************Visit our website for downloadable data sheets, brochures & pricing: www.Gavazzi Online .com。
CS4397-KS中文资料

CoDeSys CPX CPX-CEC商业自动化控制器说明书

CoDeSys embedded controller for CPX CPX-CECMore performance, lower costs CPX-CEC: improved cycle times –more connectable actuators. The integrated CANopen Master allows pneumatic and electric axes to be intelligently actuated.The comprehensive CoDeSys library takes care of diagnostics and condition monitoring.SoftmotionFor CPX-CEC-M1, the c ontroller can perform a 2.5-dimensional interpolation of electrically mov-able axes. F lexible electronic camming functions included.Simple, yet efficient: decentralised structuresThe modular I/O system with up to 512 I/O and its CAN-Master func-tion a lity offers complete flexibility.Whether it’s an open- and closed-loop control stand-alone for eco-nomical automation (e.g. of manual work stations) or on-site remote control with pre-processing.Simply unique in IP65The holistic automation platform for standard, proportional and servo-pneumatics, sensors and motion control in IP65. Including easy c ommissioning.Multi-purposeSimple and reliableUnique platformProgramming in a world language, automation and profit - freely in accordance with IEC 61131-3. For standardised pre-processing: CPX-CEC. As an intelligent remote I/O terminal in IP65/IP67 directly on the machine, it reduces installation costs. It’s ideally adapted for CPX and motion applications with up to 31 electric drives. 210.18.PSIProduct Short InformationCoDeSys IEC 61131-3!CoDeSys embedded controller for CPX CPX-CECCPX-CEC functions• Easy control from valve terminal configurations with MPA, VTSA • Connection to all fieldbuses as remote controller and for pre-processing• Activation of electric drives as individual axes via CANopen • Diagnostics with flexible moni-toring possibilities for pressure,flow rate, cylinder run time, air consumption, early warnings and visualisation optionsSoftware platform CoDeSysCoDeSys makes your life easier with simple commissioning, fast programming and parameterisa-Technical data Processor 32 bit MIPS, 400 MHz User memory20 MB flash/4 MB project Remanent memory32 KBCommunication network Ethernet 10/100 Base-TFieldbus masterCANopen optional, only with CPX-CEC-C1PLC operating system CoDeSys 2.3 Full RTSCommunication interface RS 232 optional, only with CPX-CEC Diagnostics Handheld for CPX terminal can be con-nectedOperation All FEDs can be connected via Ethernet Visualisation OPC server for connection to any SCADA packagesNetworkingAll fieldbus modules of the CPX terminal:Profibus, ProfiNet, Ethernet IP , DeviceNet Modbus TCP , CANopen, Interbus etc.EA All modules of the CPX terminal are sup-portedSoftmotion8 axes for interpolation operationProject engineering with control configuration inside CoDeSys• Activation of decentralisedinstallation systems on the basis of CPI• Activation of applications of pro-portional pneumatics• Servo-pneumatic applications • AS-interface control via Gateway CPX-CEC variants:RS232: CPX-CEC CANopen master: CPX-CEC-C1Softmotion:CPX-CEC-M1tion – standardised programming of control systems to IEC 61131-3 standard.2010/03S u b j e c t t o c h a n g eFesto AG & Co. KGRuiter Strasse 8273734 Esslingen Tel. +49 711 347-0 Fax +49 711 347-2144*******************************。
机械工程专业英语单词

Lesson 1 Basic Concepts in M e c h a n i c s机械学的基本概念mechanics n.力学modify v.修改,调解,变更manageable a.可控制管理的incline v.使倾斜ramp n.斜板,斜坡道slope v.使倾斜friction n.摩擦roll v.滚动multiplier n.放大器,乘法器broom n.扫帚convert v.转变化handle n.手柄把sweep v.扫荡描,掠过efficiency n.效率gauge vt.测计量,校验bearing n.轴承ideal mechanical advantage 理想的机械效益neglect vt.忽略Lesson 2 Basic Assumption in Plasticity Theory 塑性理论的基本假设assumption n.假定plasticity n.塑性investigate v.调查,研究deformation n.变形metal forming process 金属成型工艺过程strain rate n.应变速率strength n.强度stress n.应力yield stress 屈服应力flow stress 流动应力tensile stress 拉伸应力compressive stress 压缩应力shear stress 剪切应力geometry n.几何形状elastic a.弹性的springback n.回弹bending n.弯曲,折弯precision forming 精密成型tolerance n.公差continuum n.连续体metallurgical a.冶金学的grain n.晶粒dislocation n.位错uni-,tri-,multi-axial a.单,三,多轴向的anisotropy n.各向异性cylindrical a.圆柱体的cross-section n.横截面platen n.工作台板,模板coincide with 一致,相符validity n.正确有效,合法with ease 轻而易举的,很容易的Lesson 3 Optimization for Finite Element Applications有限元优化的应用optimization n.优化,优选法finite element 有限元iterative a.反复的,迭代的alternative .交替的,可供选择的manual a.手动的,人工的trial-and-error 试凑法bias vt,n.使偏向重、差a desktop platform 计算机桌面平台constraint v,n.强制,约束response n.反响应,灵敏度parameter n.参数parametric a.参数的preprocess vt.预先加工,预处理mesh n,v.网格,啮合capability n.能力,性能,容量loop n.环,回路,循环pose v.提出model n.模型,样品displacement n.位移,排量,替换buckling n.弯翘曲,挠度factor n.因素gradient n.坡梯度,斜率flur n.电,磁,热,光通量,流量multidisciplinary a.多学科的deflection n.偏移转,离,挠曲Lesson 4 Metals 金属toughness n.韧性corrosion n.腐蚀dump v.倾倒,堆放recyle v.反复循环利用copper n.铜aluminum n.铝bronze n.青铜器alloy n.合金wear v.磨损metallic a.含金属制的specification n.操作规程,技术要求,说明书extract vt.提炼,萃取iron n.铁carbon n.碳ferrous a.含铁的ferrous metals 黑色金属lead n.铅zinc n.锌tin n.锡ore n.矿石mineral n,a.矿物的impurity n.杂质,不纯Lesson 5 Metallic and Nonmetallic Materials金属和非金属材料magnesium n.镁nickel n.镍brass n.黄铜luster n.光泽ductility n.延展性,可锻性it is likely that 很可能it is certain to inf.必然,一定density n.密度be distinguished from 与…区分coefficient n.系数in connection with 关于,与…相关结合category n.种类hardness n.硬度elasticity n.弹性beam n.横梁,一束光penetration n.贯穿,渗透abrasion n.磨损耗roll n,v.轧辊,滚,轧mill n.轧钢机,铣床spring n.弹簧permanent a.永久的rupture n.破开裂stamp n.冲压hammer n.锻锤Lesson 6 Plastics and Other Materials塑料和其他材料inorganic acid 无机酸sulphuric acid 硫酸hydrochloric acid 盐酸solvent n.溶剂carbon tetrachloride 四氯化碳rigid a,n.坚硬的,刚性的,刚度mouldmold n.模子,塑模,铸模decoration n.装饰fabricate vt.制造备,生产injection molding 注射模塑法blow molding 吹塑法compression molding 压塑法,模压法extrusion n.挤压vacuum forming 真空模塑法powder metallurgy 粉末冶金constituent n,a.组成的,部分,组元simultaneously adv.同时subsequently adv.随后coherent a.互相凝聚的,协调一致的fusion n.熔化,熔接crystalline n,a.结晶的,晶体的restriction n.限制定,节流blend n,v.混合物,融合press n,v.压力机,压制homogeneous a.均匀的sinter n,vt.烧结物Lesson 7 Die Life and Die Failure 模具的寿命和失效die n.模具,锻冲模,凹模die life 模具寿命die failure 模具损坏deterioration n.变坏,退化,损耗surface finish 表面光洁度breakdown n.破坏,击穿lubrication n.润滑cracking n.裂纹breakage n.断裂mode n.方式,状态,模式thermal fatigue 热疲劳layer n.层abrasive n,a.研磨料的,磨损的impression n.模膛,型腔槽heat checking 热裂纹,龟裂steep n,a.陡坡的,急剧的reversal n.颠倒,相反overload n,v.使过超载initiation n.开初始,发产生discrete a.不连续的,单个的variable n.变量cavity n.模膛,型槽stock n.坯料,原材料impact n,v.冲击,碰撞Lesson 8 Cold Working and Hot Working冷加工和热加工coldhot working 冷热加工forging n.锻造,锻件classification n.分类recrystallization n.再结晶take place 发生strain deformation hardening 应变变形硬化be referred to as 叫做,称为,被认为是warm working 温加工,温锻ultimate a,n.最终的,首要的,极限stress relieving 消除应力处理austenitic a.奥氏体的stainless steel 不锈钢annealing n.退火grain size 晶粒度solid solution 固溶体refinement n.精炼制,细化hazard n.危险,未知数,意外事件inherent a.固有的,先天的,本质的sensitive a.灵敏的,敏感的abnormal a.非正常的critical strain 临界应变Lesson 9 Casting 铸造casting n.铸造件die-casting n.模铸件foundry n.铸造车间pour v.浇注suitability n.适应性pig iron 生铁cupola n.冲天炉,化铁炉erosion n.腐蚀,侵、烧蚀ladle n.铁水包graphite n.石墨solidify v.使凝固disjoin v.拆散,分开ingot n.钢锭destructive a.破坏性的,有害的retard vt,n.使延缓,推迟solvent n,a.溶剂的copper-base alloy 铜基合金Lesson 10 Metal Forming Processes in Manufacturing 制造中的金属成形工艺machine-building 机械制造plastic working 塑性加工billet n 坯料,锻坯blank n.坯料,冲压板坯configuration n.外形,配置,排布stroke n.行程,冲程amortize v.阻尼,缓冲,分期偿还reliability n. 可靠性,安全性drawing n.锻坯拔长,线,管材拉拔deep drawing 深冲压brake forming 压折弯机成型stretch forming 张拉成型military n,a.军队事,人的consumer goods 消费品integrity n.完整性,完全善jet engine 喷气发动机turbine n.涡汽轮机,透平机regarding 考虑到,关于Lesson 11 Forging锻造armor n.铠甲immortalize vt.使不朽灭blacksmith n.锻工mechanical press 机械压力机hydranlic press 液压机anvil n.锤砧,砧座craftsman n.技工handling n.处理,装卸,搬运flexibility n.柔韧性,灵活性drawn out 拔长upset n.镦粗,顶锻closed impression die 闭式模锻rapid-impact blow 快速冲击,猛打vertical a.立式的ram n.锤头,滑块,活动横梁block n.模块draft n.模锻斜度symmetrical a.轴对称的sizing n.整形,校正,定径drop forging 落锻,锤模锻impression die forging 模锻final forging 终锻overheat n.过热furnace n.熔,高炉pyrometer n.高温计Lesson 12 Benefits and Principles of Forging锻造的优点和工作原理metalworking n.金属压力加工knead v.揉搓制refine v.精炼制,细化porosity n.多孔性,疏松orient v.使定取向flow line 流线stress field 应力场manual skill 手工技巧at one’s command 自由使用,支配soundness n.致密性,坚固性,无缺陷attainable a.可达得到的open die forging 自由锻gross n.总共,重大confine vt. 限制,约束convert v.转变换,更换broken up 破断裂,分散microshrinkage n.显微缩孔elimination n.消除,淘汰align v.调整,对中,校直Lesson 13 Welding焊接welding v,n.焊接,熔焊pressurewelding 压力焊spotwelding 点焊buttwelding 对头缝焊fusionwelding 熔焊,熔接fiux-shielded arc welding 熔剂保护电弧焊diversity n.不同多样性fastening v,n.连接件,紧固件shielding n.遮护,屏蔽soldering v,n.软钎焊,低温焊料bismuth n.铋cadmium n.镉rivet n,v.铆钉,铆接braze n,vt.硬钎焊,铜焊oxidation n.氧化flux n.焊接,助溶剂squeeze v.挤压oxy-acetylene n,a.氧乙炔的torch n.焊炬electrode n.电焊极,焊条filler n.填充剂overlap v.搭接,重叠strike v.攻打击,放电Lesson 14 Heat Treatment热处理heat treatment 热处理microstructure n.显微组织low-carbon steel 低碳钢prescribe v.规定,指示microscopic a.显微的,微观的spheroidizing n.球化处理normalizing n.正火,正常化annealing n.退火hardening n.淬火tempering n.回火soaking=holding n.均热,保温retarding media 延缓介质prolonged a.长时间的,持续很久的critical temperature 临界温度globular a.球形状的carbide n.碳化物,硬质合金quenching n.淬火,骤冷removal n.除去,放出Lesson 15 Introduction to Mechanism机构介绍mechanism n.机械,机构,机构学kinematic a.=kinematical 运动的,运动学的kinematic chain 运动链link n.构件,杆件. v.连接结definite a.确定的constrained a.约束的,限定的unconstrained a.无约束的linkage n.连杆组,机构joint n.结接台,铰链. a.连接的,联合的pin n.销钉,铰销revolution v.旋转,转动. n.回转体prismatic a.棱柱形的nonlinear a.非线性的four-bar linkage 四杆机构kinematic chain 运动链prime mover 原动者机,驱动件coupler n.连接件,连杆pivot n.枢轴,轴销,回转副,旋转中心configuration n.外形,构造,结构inversion n.转换,更换slider-crank mechanism 曲柄滑块机构multiloop n.多环链,a.多回路的sketch n.草简,示意图,v.画草图,草拟skeleton diagram 草图,示意图,简图envision v.想象binary a.二双,复的,二元的ternary a.三元的ternary links 三杆组quaternary a.四元的quaternary links 四杆组cam 凸轮cam follower n.凸轮从动件gear n.齿轮sprocket n.链轮belt n.皮,布,钢带pulley n.带轮spherical a.球的,球面的helical a.螺旋的three-dimensional 三维的,空间的intuitively adv.直觉观地synthesis n.合成法,综合kinematician n.运动学研究者家innate a.先天的,固有的Lesson 16 Movement Analysis 运动分析criterion n.判断标准,判据,准则branch n,v.分部,支transmission angle 传动角rock n.摆动, v.摇动oscillate v.摆动,摇动parallelogram n.平行四边形antiparallelogram n.反平行四边形frame n.机架,构架impart v.给予,分给to impart M to N 把M给Ntorque n.力矩,扭矩dynamic a.=dynamical 动力的,动力学的inertia n.惯性物,惯量static a.=statical 静力学的,静的index n.指数,指标friction n.摩擦thumb n.拇指,v.用拇指翻rule of thumb 根据经验和实际所得的做法matrix n.矩阵determinant n.行列式derivative n.导数derivative of M with respect to N M对于N的导数movability n.可动性,易动性parameter n.参数discount v.打折扣,忽视absolute a.绝对的graphical a.图形的,图解的polygon n.多边形theorem n.定理stress n.应力bearing n.轴承centripetal a.向心的Lesson 17 Kinematic Synthesis运动的综合packaging machinery 包装机械lubrication n.润滑specification n.技术要求actuation n.驱动jerk n.震动,冲击axis n.轴线,心,中心线contour n.外形,轮廓线eccentricity n.偏心度,率gear ration 齿轮速,齿数比topologically adv.拓扑学地customary a.通常的,习惯的correlate v.使相关,使发生关系analog n.=analogue 类似物,模拟linear analog 线性模拟second acceleration 二阶加速度higher acceleration 高阶加速度paraphrase v.释义,意译describe v.叙述,描述,作…运动category n.种类,类别deliberation n.慎重考虑province n.省,领域preconceive v.预想,事先想好analog computer 模拟计算机trace v.追踪,描画timing n.定时,计时,配时pitch v.投掷trajectory n.轨迹embed v.嵌入,夹在层间orientation n.定方位,取方向scoop n.勺子,铲斗, v.挖,掘,铲Lesson 18 Cams and Gears凸轮和齿轮cam n.凸轮gear n.齿轮curve n.曲线 a.弯曲的groove n.槽,沟mate v.配合,啮合cylindrical a.圆柱的two-dimensional or planer 两维的或平面的three-dimensional or spatial 三维的或空间的normal n.法线 a.垂直的complement n,a.余角,余的collinear a.共线的lateral a.横向的,侧向的stem n.杆guide n.导向件器,装置,导槽座intermittent a.间断的,不连续的dwell n,v.停止,小停顿inertial a.惯性的,惯量的engage v.啮合rack n.齿条noncircular a.非圆的conjugate a.共轭的,n.共轭值线cycloidal a.摆线的involved a.渐开线的, n.渐开线tolerance n.间隙,公差spur gear 直齿圆柱轮radial a.径向的,沿半径的offset n,vt.偏移,偏心 a.偏心的disk cam 盘形凸轮tangent n.切线 a.相切的,切线的concentric a.同圆的,同心的camshaft n.凸轮轴pitch curve 节线herringbone a.人字形的intersect v.横穿,相交parallel helical gear斜齿轮,平行轴螺旋齿轮crossed helical gear 交错轴螺旋齿轮face gear 端面齿轮spiral bevel gear 螺旋齿圆锥齿轮worm n.蜗杆skew bevel 斜齿圆锥齿轮hypoid gear 准双曲面直角交错轴双曲面齿轮addendum n.齿顶,齿顶高project v.伸出,突出clearance n.间隙dedendum pl. dedendan.齿根,齿根高tooth space 齿间距backlash n.间隙,齿隙Lesson 19 Screws, fasteners and joints螺纹件、紧固件和联接件screw n.螺钉,螺丝, v.旋紧,攻丝fastener n.紧固件joint n.连联接,接合bolt n.螺栓nut n.螺母cap screw 有头螺钉setscrew n.定位固定,调整螺钉rivet n.铆钉, v.用铆钉铆接key n.键weld n,v.焊接,熔焊braze n,v.钎焊,铜焊clip n.夹子, v.夹住,夹紧synonymous a.同意义的monotonous a.单调的taint n.污点,污染 v.弄脏tough a.坚韧的ductile a.可延伸的,有延展性的,韧性的tighten v.上紧,拉紧twist v.扭转jumbo n.大型喷气式客机titanium n.钛close-tolerance 高精密度的tooling n.工具,刀具 v.用刀具切削加工proliferate v.增殖,增殖assembly n.安装,装配,组件tap n.丝锥, v.攻螺丝stud n.双头螺栓resemble v.类似,像thread n.螺纹线,v.车螺纹drill n,v.钻孔hexagon head 六角头fillister n.凹槽flat head 平头hexagon socket head 六角沉头disassemble v.拆开tensile a.拉张力的,受拉的shear n.剪切力 v.剪切断harden v.使硬化washer n.垫圈preload n.预载荷fatigue n.疲劳micrometer n.千分尺,千分表elongation n.拉伸长modulus n.模数,模量wrench n.扳手dial n.刻度盘fractional a.分数的,小数的Lesson 21 Helical, Worm and Bevel Gears斜齿轮、蜗杆蜗轮和锥齿轮helical gear 斜齿轮worm n.蜗杆,螺杆bevel gear 圆锥齿轮helix n,a.pl. helices 或 helixes 螺旋线,螺旋线的right hand 右手,右旋的helicoid .螺旋面,体,螺旋状,纹的wrap v.缠绕unwind v.解开,展开generate v.产生,展成加工engagement n.啮合,接触diagonal n,a.对角线的objectionable a.该反对的,不能采用的spiral n,a. 螺旋线的,卷线的spiral gear 螺旋齿轮mesh n.啮合worm gear 蜗轮pinion n.小齿轮pitch cylinder 节圆柱concave a.中凹的curvature a.曲率screw-like 像螺丝杆的thread n.线状物,螺纹线envelop v.包围,封闭enclose v.包围lead angle 导角cast v.铸造mill v.铣削outboard a,ad.外侧的,向外pronounced a.明确的,显着的stress n.应力tapered a.锥形的positively ad.确定地,强制传动地Pitch-line velocity 节线速度automobile differential 汽车差速器gearing n.齿轮传动装置offset n.偏置,横距hypoid a.准双曲面的hyperboloid n.双曲面,双曲面体Lesson 22 Shafts, Clutches and Brakes轴、离合器和制动器shaft n.轴clutch n.离合器brake n.制动器pulley n.皮,胶带轮flywheel n.飞轮sprocket n.链轮,星轮bending moment 弯曲力矩torsional a.扭转的static a.静力,态的axle n.心轴,轮轴spindle n.心轴,主轴deflection n.偏移,弯曲fillet n.圆角,倒角peening n.喷射加工硬化法shot peening 喷丸硬化stiff a.刚性的inertia n.惯性,惯量slippage n.滑动actuation n.驱动,开动coefficient n.系数statics n.静力学rim n.边缘,轮缘shoe n.闸瓦,制动片块band n.带,条cone n.圆锥miscellaneous a.混合的,杂项的assume v.假设,承担statical a.=static,静态的equilibrium n.平衡reaction n.反应,反力overload-release clutch 超载释放保护离合器magnetic fluid clutch 磁液离合器shift v.变换,使移动lever n.杆,手柄jaw n.颚板,夹爪ratchet n.棘轮circumferentiallyad v.周围地,圆周地mate v.配合,啮合,联接synchronous a.同步的linear drive 线性驱动装置clicking n.‘卡塔’声freewheel v.空转coupling n.联轴器sleeve n.套筒flat n.平面部分 a.平的periphery n.圆周,周边wedge n.楔形物 v.楔入pawl n.棘爪powder n.粉末mixture n.混合物electromagnetic a.电磁的coil n.线圈excitation n.刺激,激励shearing a.剪切的lockup n.锁住Lesson 41 Definition of Robotics and the Robot System manipulator n.操作器,控制器,机械手peripheral a.周围的,外围的idiot n.白痴integrate v.使成为一体,使结合起来hard automation 刚性自动化a host of 许多Lesson 42 Basics of ComputersIexecute v.执行binary a.二进制的read only memory ROM 只读存储器random access memory RAM读写存储器,随机存储器erasable a.可擦去的volatile a.可丢失的Lesson 43 Basics of Computers二harsh a.恶劣的robust a.稳定的configuration n.结构,组态Morse Code 莫尔斯电码suffice v.足够interference n.干扰fluctuation n.脉动,波动expendable a.可消耗的intermediate a.中间的adaptor n.转换器transformer n.变压器rectifier n.整流器capacitor n.电容器Zener diode 齐纳稳压二极管buffer n.缓冲寄存器come across 碰到Baud rate 波特率Lesson 44 Programmable Controllersalbeit conj.虽然light-emitting diodes 发光二极管relay ladder logic 继电器梯形逻辑图archaically a.古体的,旧式的retention n.保留,保持versed a.熟练的,精通的fluidics n.射流sheer a.完全的,绝对的profligate a.浪费的proprietary a.专利的,专有的boolean expression 布尔表达式Lesson 45 CAD/CAMComputed-aided designCAD n.计算机辅助设计Computed-aided manufacturingCAM n.计算机辅助制造automatic factory n.自动化工厂drafting n.制图Computer-aided engineering n.计算机辅助工程management information systems n.管理信息系统graphics terminal n.图像终端a shared data base n.公用数据库three-dimensional a.三维的keyboard n.键盘lightpen=light pen n.光笔magnify v.放大flip v,n.翻转copy v.拷贝a mirror image 镜像symmetrical a.对称的artwork n.印刷线路原图Geometric modeling n.几何模型制造kinematics n.运动学Lesson 48 Flexible Manufacturing Systemsfexible manufacturing systemsFMS 柔性制造系统flexible manufacturing cellesFMC 柔性制造单元automated guided vehicles 自动搬运小车conveyor n.传送装置pallet loading and unloading carts 上下料小车part program 零件程序data base 数据库data processing networks 数据处理网络inspection program 检测程序robot program 自动机程序real-time control data 实时控制数据the Control hierarchy 控制层次real-time fault recovery 实时故障恢复unmanned operation 无人化操作chip removel 排屑module n.模块,组件intelligent node智能节点。
840d轴参数(840daxisparameters)

840d轴参数(840 d axis parameters)30100 Settings: drive type30110 Settings: drive/module number30120 Settings: output to sub-module/moduleThe type of output of the set valueThis axis is the virtual axisThe output of 30134 is not monopolarNumber of encoders for 30200Actual value: driver typeActual value: driving number/measurement circuit number 30230 valid values: enter the module number/measurement loop Actual value: encoder typeThe 30242 encoder is independentType of encoder measurementLocation of internal encoder for 30250Absolute encoder: absolute/incremental precisionAbsolute encoder: location buffer modeThe driver number of the second drive encoder is 30280 30300 rotation axis/spindleChange of rotation axis/spindle modulus30320 rotation axis 360-degree mode displayThe size of the 30330 module scope30340 Modulorange launch locationAxis signal of simulation axis 30350This axis can be programmed with C cycleReset default: neutral or channel axis30455 axis function30460 axis function30,500 is the dividing axis30501 point axis equilocation moleculeThe denominator of the 30502 degree axisThe 30503 point axis first equal position30505 this axis is the dividing axis (Hirt) with a dividing tooth.30550 axis changed channel initial SettingsAutomatic GET when restoring axis 3055230554 initial setting, NCU gives the setting of the axisThe 30560 axis is a local coupling axis30600 G75 axis positionWork area limit type detection31000 linear feet31010 linear ruler separation timeEncoder mark for every turnHigh precision coder31030 screw pitchThe 31040 encoder is directly mounted on the machine toolAn encoder at the top of the gearboxThe denominator of the load gearboxLoad gear box counterThe denominator of the 31064 additional gearbox The counter of the additional gearboxThe denominator of the 31070 solver gearbox The counter of the 31080 solver gear box31090 INC/handwheel increment weight31100 monitors the number of moves31110 monitor the movement of the steps31120 BERO detects the signal edge31122 BERO delay time31123 BERO delay time31130 VCO features modified 62.5khz31140 VCO features modified 125KHz31150 VCO features modified 185.5 kHz31160 VCO features modified 250kHzConversion coefficient when g70/g71 takes effect31300 reserved:31310 reserved:31320 reserved:31330 reserved:31340 reserved:The maximum frequency of stepping motorNumber of steps per revolutionThe axis number of the desired value of 31,500The deviation value of the service setThe gain of the required value monitoring31600 axis Vdi - Signal trajectory listMaximum axis speed32010 JOG fast forward32020 JOG axis feed rateIn the 32040 JOG mode, the rotation rate of overtones is carriedoutThe 32050 JOG method per rotationThe speed initial setting of the positioning axis 32070 handwheel ratio corresponding axis speed32074 FRAME or HHL correction is not allowedLimit of optional incrementLimit of speed coverageEffect of VDI signal on 32084 handwheelThe ratio between JOG and handwheel speedMovement direction (not feedback polarity)Symbol of the actual value of 32110 (feedback polarity) 32200 servo gain coefficientPosition controller reset timeActivate the whole activity position controller32250 rated output voltageRated motor speed32300 axis acceleration32310 speed step overloadThe 32400 axis shock limitThe filter type of the collision limit of 32402 axisThe time constant of the 32410 axis impact filterFrequency of suppression of vibration filter of 32412 axisThe damping of the 32414 axis vibration filterThe enabling of the 32420 axis impact constraint32430 shaft impactMaximum impact of 32431 path axis movementThe maximum axial displacement of block transmission during path motionThe maximum axial acceleration and scaling factor of SOFT with SOFTThe maximum axial acceleration and scaling factor of G00The ratio of the maximum axis impact of the 32435 G00 movementThe smoothing frequency of the predictive function 32450 reverse clearanceThe weight coefficient of the 32452 gap32460 electronic compensation increases torqueType of friction compensationFriction compensation is in forceThe adaptation of friction compensation plays a role Maximum friction compensation valueMinimum friction compensation value of 32530Friction compensation time constantThe acceleration value is 1Adaptive acceleration value 2Adaptive acceleration 332580 friction comparison coefficient (kai)Speed feedforward control coefficientThe type of 32620 feedforward control32630 PRO feedforward controlDynamic rigidity controlDynamic rigid control configurationDynamic hardness control: delay32650 torque feedforward control inertiaAxial mass of 32652 torque feedforward controlCompensation for error compensation of 32700 encoder/screw pitch errorBend the bow to compensate for the energyVertical compensation measurementMaximum sag compensation32730 CEC speed modificationThe type of temperature compensation of 32750Temporary compensation for change in speed of 32760 Equivalent time constant of the 32800 current control loop The equivalent time constant of the speed control loopDynamic response adaptationThe time constant of dynamic adaptationA smooth filter for adaptive controlPosition control output filter activationPosition control output filter time constantThe damping of position control loop32960 location controller dead zone32990 actual location setting delayType of 33000 fine interpolator33050 section distance (PLC signal)Maximum difference of 33100 compressionThis axis has a reference point bump34010 the negative direction is close to the reference point 34020 CAM approach speedThe maximum displacement of reference CAM34040 reference point pulse search speed34050 is close to the direction of the reference point CAM The maximum distance of reference zero pulse34070 reference point approach speed34080 reference point distance34090 reference point biasBias of the electronic CAMReference CAM/marker distance34100 reference point locationThe coder of reference points is synchronized34104 searches for the enabled state of the follow - up state 34110 axis back to reference point sequence34120 BERO polarity changesA 34200 reference point methodAdjustment of the absolute value encoderThe module of the absolute rotation encoderThe serial number of the encoderRange of encoder serial number34300 reference point marker distanceThe interval between the two test pointsThe axis/encoder moves in the opposite directionStop when the reference mark is detected34400 SSI encoder synchronizes data34410 SSI absolute value encoder information length Each step of the 34,420 encoderThe smooth time constant of the actual value of 34990 Distribute the spindle to the shaft of the machine tool The 35010 variable speed can be changed35012 gear level switching positionInitial setting of the main axisActivate basic spindle settingThe characteristics of the single spindle reset mode Main shaft functionFree spindle RESET (RESET)Maximum spindle speedMaximum speed of the 35110 changeoverMinimum speed of change of gear shiftMaximum speed of 35130 speedThe minimum speed of the 35140 gear gearsMain axial velocity toleranceThe spindle speed limit is given by the PLC35200 open-loop acceleration35210 is the acceleration of position controlThe speed of the decreasing acceleration of 35220 Decrease the acceleration35240 the decrement of accelerationType of acceleration reduction35300 position control is effectiveLocation delay of 35310Position rotation direction of position 3535035400 reciprocating speedAcceleration of the reciprocating motion of 35410The starting direction of 35430 reciprocating35440 M3 direction reciprocation timeThe reciprocating time in the direction of 35450 M4 35500 spindle feed activationThe advance of the main axis at rest will enable it The maximum speed of the 35550 drilling functionThe 35590 parameter group can be modified36,000 roughly36010 accuracy to stopPrecision stop coefficient, coarse/precise and standard36020 fine precise stop time delayStatic error36040 static monitoring delay time36042 delay, stop monitoring, torque /36050 clamping errorSpecial features of 36052 shaft clampingThe value of the static valve at 36060The first negative limit switch of 36100The first forward soft limit switchSecond negative to soft limit switchSecond forward soft limit switchThe valve value of the speed monitoringMaximum speed set value of 36210Speed setting monitoring delay timeMaximum frequency of encodersThe limit frequency of the encoder is resynchronized36310 zero pulse monitoring36400 contour monitoring tolerance range36480 toleranceThe real value conversion tolerance of 3650036510 encoder location toleranceThe valve value of the speed monitoring required for 36520 Output distribution of 36989 SC1 - SC4The output distribution of actual stopDisplay axis crossing timeThe date/time of last change of SI - nck-md dataPrior security configuration data for 3699436995 rest position36997 user confirmationActual checksumThe (expected) checksum required for 3699937000 runs to fixed point mode37002 improves fixed stop point function control 37010 default fixed point stop torqueFixed stop clamping moment mode time37014The default fixed point stop monitoring range The valve value of the fixed stop test at 37030 37040 fixed point stop detection via sensorStop the alarm at 37050Fixed stop alarm return36060 PLC confirmed shielding37070 simulation driven torque limitation37080 torque or (FOC) initial settingDefinition of the 37100 synchronous axisError alarm limit of 37110 synchronous error Operating limit of the synchronous axis at 37120Synchronous operation restriction at 37130 reference points 37140 invalidates the sync axis grouping37160 boot value matching37200 & quot; Rough synchronisation & quot; The threshold 37210 & quot; Exact synchronization & quot; The threshold 37220 & quot; Thick & quot; Speed tolerance37230 & quot; Thin & quot; Speed toleranceThe main shaft number of 37250 speed couplingThe spindle number of torque controlProbe balance control biasActivate torque balance controllerTorque balance control gain coefficientComprehensive execution timeTorque balance control limitWe're activating master slave37264 the Master - Slave torque37266 time constant traction momentTorque of the driven shaft37270 is a gross deviation from the speed tolerance37272 is accurate from speed tolerance37274 transformation from the direction of the axis of motionThe workspace restriction of digital measurement in 37300; & quot; - & quot; & quot;The workspace limitation of digital measurement in 37310; & quot; + & quot; & quot;The maximum axial velocity of digital measurement at 37320 The Angle of the Angle identified at 37400The default Angle of the subsequent tangent37500 axle mode & quot; Extension stops and retreats.The delay time of the 37510 ESR single shaft (PLC control shaft) IPO control brake PLC control axis of ESR timeSpeed/acceleration limit warningThe start value of the acceleration axis of 3756037600 input time (Profibus Ti)37602 set output time (Profibus To)37610 Profibus control bit configuration37620 Profibus torque reduced resolutionIntermediate points of the 38000 encoder/spindle compensation Compensation for arc error of 38010MD 34100: after the REFP_SET_POS system finds the reference point, the number shown on the screen is the reference point number.。
Parker电子压力、 vacuum和流量控制器说明书

TMParker Electronic PressureControllers Make it Easy!By converting an electrical control signal into a closed-loop, tightly regulated pneumatic output, Parker’s EPC solutions precisely control critical pressure, vacuum, and fl ow. Replacing manual regulators, needle valves, fl ow controllers, and bleed orifi ces, Parker’s EPC products are available in a range of confi gurations and are ideal for use in:● fl ow cytometry● liquid chromatography ● gas chromatography ● air over liquid ● mass spectrometry ● analyzers● liquid dispensing ● hydro-dynamic focusing ● forensic science● and more...Fast Set-up, Constant Flow, Automatic Adjustments, and Reliable DataDPPC TM - Digital Pneumatic Process Controller*VSO EP TM - Pressure Control ModuleAlso Available:VSO EV TM - Vacuum Control Module VSO GC TM - Flow Control Module57 x 57 x 31mm 57mm57mm 31m m 60m m26mm27mm OEM EP TM -Miniature PressureControl Module26 x 60 x 27mm 75 x 75 x 38mm75mm75m m38m m 39 x 71 x 42mm71mm39m m42m m *Patent pendingEliminate costly manual adjust-ments and set-ups and gain proportional control over a range of dynamic applications.Parker’s full suite of electronic pressure control devices offer “Set and Forget” closed-loop control, high accuracy, and low power consumption.Stop doing things the hard way.OEM-EP MiniaturePressure Controller Basic closed-loop pressure controller with onboard pressuresensor in a compact size.VSO-EP Pressure Control Module VSO-EV Vacuum Control Module VSO-GC Flow Control Module VSO-HP High Performance Pressure ControllerDPPC Digital Pneumatic Process ControllerEPC Product Comparison ChartVSO HP TM -High Performance Pressure ControllerDescriptionTypical ApplicationsFeedback/Output Signal ProductHighly confi gurable pressure controller with choice of onboard or remote pressure sensor .Vacuum controller with range to -345 mbar & choice of onboard or remote pressure sensor . Highly repeatable fl ow controller ideal for GC/MS applications. Solves the most demanding pressure & fl ow control applications with the fastest response & depressurization.Stand alone fl uidic controller that combines the functionality of a 3 channel pressure controller and a PLC Controller . Portable environmental sensing, TOC analyzers, portable GC/MS, column and split fl ow control, air over liquid Pilot pressures, air over liquid,fl ow control Vacuum pressure range,sample aspiration, evacuation,vacuum fl ow control Column head pressure, fl ow control (purge gas and split fl ow)Pilot pressures, dynamic pressure switching, I-to-P applicationsAny application where it is desirable for pressure, vacuum, or fl ow control decisions to be made remotely by a “smart” fl uidic controller 1 Internal Transducer (std)1 Analog Output (std)1 Internal Transducer (std)1 Analog Output (std)1 Internal Transducer (std)1 External Transducer (opt)1 Analog Output (std)1 Internal Transducer (std)1 External Transducer (opt)1 Analog Output (std)1 Internal Transducer (std)1 External Transducer (opt)1 External Digital Trigger (opt)1 Analog Output (std)6 total inputs (confi gurable)Any combination up to 3 Analog or 6 Digital 6 max outputs (confi gurable)1 (Analog Pressure), 3 (Digital),2 PWM, 5 Amplifi edEPC APPLICATIONSABOUT PARKER LIFE SCIENCESParker Life Sciences, a business unit within the Pneutronics Division of Parker Hannifi n, brings leading motion control and fl uidic control solutions together for life sciences applications. Parker products, sub-systems, and systems are integral to the world’s drug discovery, bioanalytical, and medical instrumentation. From miniature solenoid valves to highly integrated automation systems, Parker Life Sciences develops solutions that help OEM instrument builders speed their products to market faster and lower their overall cost of ownership.PARKER HANNIFINPARKER LIFE SCIENCES 26 Clinton Dr ., Unit 103Hollis, NH 03049T: 603-595-1500F: 603-595-8080www.parker .com/lifesciences PNDInfo@parker .comDownload:> Application Notes & Animations > CAD Files> Detailed Specifications/pneutronics/epcLab-on-a-ChipManage fl ow and maintain analytically clean processes.Gas ChromatographyEliminate thermal drift and manual adjustments.Flow CytometryPrecisely control small pressure differentials.Contact us to see if you qualify for a free evaluation unit!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
This work is sponsored by DARPA under Fort Huachuca Contract No. DABT-63-92-C-0052
center of mass. In section 6, we will relax this assumption, making the necessary modifications to the algorithm to take into account the part’s geometry. From now on, up to section 6, the words part and particle will be used interchangeably. 2. Using dynamic force fields to move parts between work cells Dynamic force fields have been introduced as a means of moving parts on an IMS [1]. A dynamic force field is a sub-region of the IMS that has its shape and/or position within the IMS changed on a time-varying basis. The idea is to put a force field around a part and move the force field in a continuous or discrete way, dragging the part along with the field (see Figure 1.) A realistic model of the movement of dynamic force fields was derived in [1], taking into account the discrete placement of the manipulators on the IMS surface. It was shown that the overall movement of the dynamic force field is not continuous, being limited to integer multiples of the length of the manipulators along the direction of movement. The derivation was made for the case of MEMS micromanipulators, but it is valid for the macro scale case as well. This overall movement constraint affects the dynamics of parts being manipulated and how fast we can move the dynamic force field without losing the part during the movement. This last problem is defined as the capture condition [1]. 3. Moving parts along a straight line segment using a squeeze force field A design goal of our algorithms is to maximize throughput. In order to achieve that, we need to move parts robustly and fast between work cells. Robustly implies that we will enforce the capture condition at all times. Fast implies that we will choose a particular dynamic force field and move it in such a way that the part will gain as much velocity as possible. In [1], we have derived a sensorless (open loop) dynamic control algorithm that enforces the capture condition while moving a part along a single straight line path, using a squeeze force field (see Figure 2.) The algorithm consists of moving the squeeze force field by a fixed distance d using non-uniform time steps. The time steps were computed in order to keep the part, as long as possible, entirely inside the squeeze region that has its force vector pointing on the same direction of the movement. The algorithm was designed for the abrupt stop case, in which the squeeze force field stops moving as soon as its center