Learning for Multi-View 3D Tracking in the Context of Particle Filters
国际自动化与计算杂志.英文版.
国际自动化与计算杂志.英文版.1.Improved Exponential Stability Criteria for Uncertain Neutral System with Nonlinear Parameter PerturbationsFang Qiu,Ban-Tong Cui2.Robust Active Suspension Design Subject to Vehicle Inertial Parameter VariationsHai-Ping Du,Nong Zhang3.Delay-dependent Non-fragile H∞ Filtering for Uncertain Fuzzy Systems Based on Switching Fuzzy Model and Piecewise Lyapunov FunctionZhi-Le Xia,Jun-Min Li,Jiang-Rong Li4.Observer-based Adaptive Iterative Learning Control for Nonlinear Systems with Time-varying DelaysWei-Sheng Chen,Rui-Hong Li,Jing Li5.H∞ Output Feedback Control for Stochastic Systems with Mode-dependent Time-varying Delays and Markovian Jump ParametersXu-Dong Zhao,Qing-Shuang Zeng6.Delay and Its Time-derivative Dependent Robust Stability of Uncertain Neutral Systems with Saturating ActuatorsFatima El Haoussi,El Houssaine Tissir7.Parallel Fuzzy P+Fuzzy I+Fuzzy D Controller:Design and Performance EvaluationVineet Kumar,A.P.Mittal8.Observers for Descriptor Systems with Slope-restricted NonlinearitiesLin-Na Zhou,Chun-Yu Yang,Qing-Ling Zhang9.Parameterized Solution to a Class of Sylvester MatrixEquationsYu-Peng Qiao,Hong-Sheng Qi,Dai-Zhan Cheng10.Indirect Adaptive Fuzzy and Impulsive Control of Nonlinear SystemsHai-Bo Jiang11.Robust Fuzzy Tracking Control for Nonlinear Networked Control Systems with Integral Quadratic ConstraintsZhi-Sheng Chen,Yong He,Min Wu12.A Power-and Coverage-aware Clustering Scheme for Wireless Sensor NetworksLiang Xue,Xin-Ping Guan,Zhi-Xin Liu,Qing-Chao Zheng13.Guaranteed Cost Active Fault-tolerant Control of Networked Control System with Packet Dropout and Transmission DelayXiao-Yuan Luo,Mei-Jie Shang,Cai-Lian Chen,Xin-Ping Guanparison of Two Novel MRAS Based Strategies for Identifying Parameters in Permanent Magnet Synchronous MotorsKan Liu,Qiao Zhang,Zi-Qiang Zhu,Jing Zhang,An-Wen Shen,Paul Stewart15.Modeling and Analysis of Scheduling for Distributed Real-time Embedded SystemsHai-Tao Zhang,Gui-Fang Wu16.Passive Steganalysis Based on Higher Order Image Statistics of Curvelet TransformS.Geetha,Siva S.Sivatha Sindhu,N.Kamaraj17.Movement Invariants-based Algorithm for Medical Image Tilt CorrectionMei-Sen Pan,Jing-Tian Tang,Xiao-Li Yang18.Target Tracking and Obstacle Avoidance for Multi-agent SystemsJing Yan,Xin-Ping Guan,Fu-Xiao Tan19.Automatic Generation of Optimally Rigid Formations Using Decentralized MethodsRui Ren,Yu-Yan Zhang,Xiao-Yuan Luo,Shao-Bao Li20.Semi-blind Adaptive Beamforming for High-throughput Quadrature Amplitude Modulation SystemsSheng Chen,Wang Yao,Lajos Hanzo21.Throughput Analysis of IEEE 802.11 Multirate WLANs with Collision Aware Rate Adaptation AlgorithmDhanasekaran Senthilkumar,A. Krishnan22.Innovative Product Design Based on Customer Requirement Weight Calculation ModelChen-Guang Guo,Yong-Xian Liu,Shou-Ming Hou,Wei Wang23.A Service Composition Approach Based on Sequence Mining for Migrating E-learning Legacy System to SOAZhuo Zhang,Dong-Dai Zhou,Hong-Ji Yang,Shao-Chun Zhong24.Modeling of Agile Intelligent Manufacturing-oriented Production Scheduling SystemZhong-Qi Sheng,Chang-Ping Tang,Ci-Xing Lv25.Estimation of Reliability and Cost Relationship for Architecture-based SoftwareHui Guan,Wei-Ru Chen,Ning Huang,Hong-Ji Yang1.A Computer-aided Design System for Framed-mould in Autoclave ProcessingTian-Guo Jin,Feng-Yang Bi2.Wear State Recognition of Drills Based on K-means Cluster and Radial Basis Function Neural NetworkXu Yang3.The Knee Joint Design and Control of Above-knee Intelligent Bionic Leg Based on Magneto-rheological DamperHua-Long Xie,Ze-Zhong Liang,Fei Li,Li-Xin Guo4.Modeling of Pneumatic Muscle with Shape Memory Alloy and Braided SleeveBin-Rui Wang,Ying-Lian Jin,Dong Wei5.Extended Object Model for Product Configuration DesignZhi-Wei Xu,Ze-Zhong Liang,Zhong-Qi Sheng6.Analysis of Sheet Metal Extrusion Process Using Finite Element MethodXin-Cun Zhuang,Hua Xiang,Zhen Zhao7.Implementation of Enterprises' Interoperation Based on OntologyXiao-Feng Di,Yu-Shun Fan8.Path Planning Approach in Unknown EnvironmentTing-Kai Wang,Quan Dang,Pei-Yuan Pan9.Sliding Mode Variable Structure Control for Visual Servoing SystemFei Li,Hua-Long Xie10.Correlation of Direct Piezoelectric Effect on EAPap under Ambient FactorsLi-Jie Zhao,Chang-Ping Tang,Peng Gong11.XML-based Data Processing in Network Supported Collaborative DesignQi Wang,Zhong-Wei Ren,Zhong-Feng Guo12.Production Management Modelling Based on MASLi He,Zheng-Hao Wang,Ke-Long Zhang13.Experimental Tests of Autonomous Ground Vehicles with PreviewCunjia Liu,Wen-Hua Chen,John Andrews14.Modelling and Remote Control of an ExcavatorYang Liu,Mohammad Shahidul Hasan,Hong-Nian Yu15.TOPSIS with Belief Structure for Group Belief Multiple Criteria Decision MakingJiang Jiang,Ying-Wu Chen,Da-Wei Tang,Yu-Wang Chen16.Video Analysis Based on Volumetric Event DetectionJing Wang,Zhi-Jie Xu17.Improving Decision Tree Performance by Exception HandlingAppavu Alias Balamurugan Subramanian,S.Pramala,B.Rajalakshmi,Ramasamy Rajaram18.Robustness Analysis of Discrete-time Indirect Model Reference Adaptive Control with Normalized Adaptive LawsQing-Zheng Gao,Xue-Jun Xie19.A Novel Lifecycle Model for Web-based Application Development in Small and Medium EnterprisesWei Huang,Ru Li,Carsten Maple,Hong-Ji Yang,David Foskett,Vince Cleaver20.Design of a Two-dimensional Recursive Filter Using the Bees AlgorithmD. T. Pham,Ebubekir Ko(c)21.Designing Genetic Regulatory Networks Using Fuzzy Petri Nets ApproachRaed I. Hamed,Syed I. Ahson,Rafat Parveen1.State of the Art and Emerging Trends in Operations and Maintenance of Offshore Oil and Gas Production Facilities: Some Experiences and ObservationsJayantha P.Liyanage2.Statistical Safety Analysis of Maintenance Management Process of Excavator UnitsLjubisa Papic,Milorad Pantelic,Joseph Aronov,Ajit Kumar Verma3.Improving Energy and Power Efficiency Using NComputing and Approaches for Predicting Reliability of Complex Computing SystemsHoang Pham,Hoang Pham Jr.4.Running Temperature and Mechanical Stability of Grease as Maintenance Parameters of Railway BearingsJan Lundberg,Aditya Parida,Peter S(o)derholm5.Subsea Maintenance Service Delivery: Mapping Factors Influencing Scheduled Service DurationEfosa Emmanuel Uyiomendo,Tore Markeset6.A Systemic Approach to Integrated E-maintenance of Large Engineering PlantsAjit Kumar Verma,A.Srividya,P.G.Ramesh7.Authentication and Access Control in RFID Based Logistics-customs Clearance Service PlatformHui-Fang Deng,Wen Deng,Han Li,Hong-Ji Yang8.Evolutionary Trajectory Planning for an Industrial RobotR.Saravanan,S.Ramabalan,C.Balamurugan,A.Subash9.Improved Exponential Stability Criteria for Recurrent Neural Networks with Time-varying Discrete and Distributed DelaysYuan-Yuan Wu,Tao Li,Yu-Qiang Wu10.An Improved Approach to Delay-dependent Robust Stabilization for Uncertain Singular Time-delay SystemsXin Sun,Qing-Ling Zhang,Chun-Yu Yang,Zhan Su,Yong-Yun Shao11.Robust Stability of Nonlinear Plants with a Non-symmetric Prandtl-Ishlinskii Hysteresis ModelChang-An Jiang,Ming-Cong Deng,Akira Inoue12.Stability Analysis of Discrete-time Systems with Additive Time-varying DelaysXian-Ming Tang,Jin-Shou Yu13.Delay-dependent Stability Analysis for Markovian Jump Systems with Interval Time-varying-delaysXu-Dong Zhao,Qing-Shuang Zeng14.H∞ Synchronization of Chaotic Systems via Delayed Feedback ControlLi Sheng,Hui-Zhong Yang15.Adaptive Fuzzy Observer Backstepping Control for a Class of Uncertain Nonlinear Systems with Unknown Time-delayShao-Cheng Tong,Ning Sheng16.Simulation-based Optimal Design of α-β-γ-δ FilterChun-Mu Wu,Paul P.Lin,Zhen-Yu Han,Shu-Rong Li17.Independent Cycle Time Assignment for Min-max SystemsWen-De Chen,Yue-Gang Tao,Hong-Nian Yu1.An Assessment Tool for Land Reuse with Artificial Intelligence MethodDieter D. Genske,Dongbin Huang,Ariane Ruff2.Interpolation of Images Using Discrete Wavelet Transform to Simulate Image Resizing as in Human VisionRohini S. Asamwar,Kishor M. Bhurchandi,Abhay S. Gandhi3.Watermarking of Digital Images in Frequency DomainSami E. I. Baba,Lala Z. Krikor,Thawar Arif,Zyad Shaaban4.An Effective Image Retrieval Mechanism Using Family-based Spatial Consistency Filtration with Object RegionJing Sun,Ying-Jie Xing5.Robust Object Tracking under Appearance Change ConditionsQi-Cong Wang,Yuan-Hao Gong,Chen-Hui Yang,Cui-Hua Li6.A Visual Attention Model for Robot Object TrackingJin-Kui Chu,Rong-Hua Li,Qing-Ying Li,Hong-Qing Wang7.SVM-based Identification and Un-calibrated Visual Servoing for Micro-manipulationXin-Han Huang,Xiang-Jin Zeng,Min Wang8.Action Control of Soccer Robots Based on Simulated Human IntelligenceTie-Jun Li,Gui-Qiang Chen,Gui-Fang Shao9.Emotional Gait Generation for a Humanoid RobotLun Xie,Zhi-Liang Wang,Wei Wang,Guo-Chen Yu10.Cultural Algorithm for Minimization of Binary Decision Diagram and Its Application in Crosstalk Fault DetectionZhong-Liang Pan,Ling Chen,Guang-Zhao Zhang11.A Novel Fuzzy Direct Torque Control System for Three-level Inverter-fed Induction MachineShu-Xi Liu,Ming-Yu Wang,Yu-Guang Chen,Shan Li12.Statistic Learning-based Defect Detection for Twill FabricsLi-Wei Han,De Xu13.Nonsaturation Throughput Enhancement of IEEE 802.11b Distributed Coordination Function for Heterogeneous Traffic under Noisy EnvironmentDhanasekaran Senthilkumar,A. Krishnan14.Structure and Dynamics of Artificial Regulatory Networks Evolved by Segmental Duplication and Divergence ModelXiang-Hong Lin,Tian-Wen Zhang15.Random Fuzzy Chance-constrained Programming Based on Adaptive Chaos Quantum Honey Bee Algorithm and Robustness AnalysisHan Xue,Xun Li,Hong-Xu Ma16.A Bit-level Text Compression Scheme Based on the ACW AlgorithmHussein A1-Bahadili,Shakir M. Hussain17.A Note on an Economic Lot-sizing Problem with Perishable Inventory and Economies of Scale Costs:Approximation Solutions and Worst Case AnalysisQing-Guo Bai,Yu-Zhong Zhang,Guang-Long Dong1.Virtual Reality: A State-of-the-Art SurveyNing-Ning Zhou,Yu-Long Deng2.Real-time Virtual Environment Signal Extraction and DenoisingUsing Programmable Graphics HardwareYang Su,Zhi-Jie Xu,Xiang-Qian Jiang3.Effective Virtual Reality Based Building Navigation Using Dynamic Loading and Path OptimizationQing-Jin Peng,Xiu-Mei Kang,Ting-Ting Zhao4.The Skin Deformation of a 3D Virtual HumanXiao-Jing Zhou,Zheng-Xu Zhao5.Technology for Simulating Crowd Evacuation BehaviorsWen-Hu Qin,Guo-Hui Su,Xiao-Na Li6.Research on Modelling Digital Paper-cut PreservationXiao-Fen Wang,Ying-Rui Liu,Wen-Sheng Zhang7.On Problems of Multicomponent System Maintenance ModellingTomasz Nowakowski,Sylwia Werbinka8.Soft Sensing Modelling Based on Optimal Selection of Secondary Variables and Its ApplicationQi Li,Cheng Shao9.Adaptive Fuzzy Dynamic Surface Control for Uncertain Nonlinear SystemsXiao-Yuan Luo,Zhi-Hao Zhu,Xin-Ping Guan10.Output Feedback for Stochastic Nonlinear Systems with Unmeasurable Inverse DynamicsXin Yu,Na Duan11.Kalman Filtering with Partial Markovian Packet LossesBao-Feng Wang,Ge Guo12.A Modified Projection Method for Linear FeasibilityProblemsYi-Ju Wang,Hong-Yu Zhang13.A Neuro-genetic Based Short-term Forecasting Framework for Network Intrusion Prediction SystemSiva S. Sivatha Sindhu,S. Geetha,M. Marikannan,A. Kannan14.New Delay-dependent Global Asymptotic Stability Condition for Hopfield Neural Networks with Time-varying DelaysGuang-Deng Zong,Jia Liu hHTTp://15.Crosscumulants Based Approaches for the Structure Identification of Volterra ModelsHouda Mathlouthi,Kamel Abederrahim,Faouzi Msahli,Gerard Favier1.Coalition Formation in Weighted Simple-majority Games under Proportional Payoff Allocation RulesZhi-Gang Cao,Xiao-Guang Yang2.Stability Analysis for Recurrent Neural Networks with Time-varying DelayYuan-Yuan Wu,Yu-Qiang Wu3.A New Type of Solution Method for the Generalized Linear Complementarity Problem over a Polyhedral ConeHong-Chun Sun,Yan-Liang Dong4.An Improved Control Algorithm for High-order Nonlinear Systems with Unmodelled DynamicsNa Duan,Fu-Nian Hu,Xin Yu5.Controller Design of High Order Nonholonomic System with Nonlinear DriftsXiu-Yun Zheng,Yu-Qiang Wu6.Directional Filter for SAR Images Based on NonsubsampledContourlet Transform and Immune Clonal SelectionXiao-Hui Yang,Li-Cheng Jiao,Deng-Feng Li7.Text Extraction and Enhancement of Binary Images Using Cellular AutomataG. Sahoo,Tapas Kumar,B.L. Rains,C.M. Bhatia8.GH2 Control for Uncertain Discrete-time-delay Fuzzy Systems Based on a Switching Fuzzy Model and Piecewise Lyapunov FunctionZhi-Le Xia,Jun-Min Li9.A New Energy Optimal Control Scheme for a Separately Excited DC Motor Based Incremental Motion DriveMilan A.Sheta,Vivek Agarwal,Paluri S.V.Nataraj10.Nonlinear Backstepping Ship Course ControllerAnna Witkowska,Roman Smierzchalski11.A New Method of Embedded Fourth Order with Four Stages to Study Raster CNN SimulationR. Ponalagusamy,S. Senthilkumar12.A Minimum-energy Path-preserving Topology Control Algorithm for Wireless Sensor NetworksJin-Zhao Lin,Xian Zhou,Yun Li13.Synchronization and Exponential Estimates of Complex Networks with Mixed Time-varying Coupling DelaysYang Dai,YunZe Cai,Xiao-Ming Xu14.Step-coordination Algorithm of Traffic Control Based on Multi-agent SystemHai-Tao Zhang,Fang Yu,Wen Li15.A Research of the Employment Problem on Common Job-seekersand GraduatesBai-Da Qu。
多模态人机交互综述(译文)
多模态⼈机交互综述(译⽂)Alejandro Jaimes, Nicu Sebe, Multimodal human–computer interaction: A survey, Computer Vision and Image Understanding, 2007.多模态⼈机交互综述摘要:本⽂总结了多模态⼈机交互(MMHCI, Multi-Modal Human-Computer Interaction)的主要⽅法,从计算机视觉⾓度给出了领域的全貌。
我们尤其将重点放在⾝体、⼿势、视线和情感交互(⼈脸表情识别和语⾳中的情感)⽅⾯,讨论了⽤户和任务建模及多模态融合(multimodal fusion),并指出了多模态⼈机交互研究的挑战、热点课题和兴起的应⽤(highlighting challenges, open issues, and emerging applications)。
1. 引⾔多模态⼈机交互(MMHCI)位于包括计算机视觉、⼼理学、⼈⼯智能等多个研究领域的交叉点,我们研究MMHCI是要使得计算机技术对⼈类更具可⽤性(Usable),这总是需要⾄少理解三个⽅⾯:与计算机交互的⽤户、系统(计算机技术及其可⽤性)和⽤户与系统间的交互。
考虑这些⽅⾯,可以明显看出MMHCI 是⼀个多学科课题,因为交互系统设计者应该具有⼀系列相关知识:⼼理学和认知科学来理解⽤户的感知、认知及问题求解能⼒(perceptual, cognitive, and problem solving skills);社会学来理解更宽⼴的交互上下⽂;⼯效学(ergonomics)来理解⽤户的物理能⼒;图形设计来⽣成有效的界⾯展现;计算机科学和⼯程来建⽴必需的技术;等等。
MMHCI的多学科特性促使我们对此进⾏总结。
我们不是将重点只放在MMHCI的计算机视觉技术⽅⾯,⽽是给出了这个领域的全貌,从计算机视觉⾓度I讨论了MMHCI中的主要⽅法和课题。
目标跟踪Visual Object Tracking总结汇报(STCT、MD-Net、SiamFC)

STCT:Sequentially Training Convolutional Networks for Visual Tracking
网络结构示意图:
STCT:Sequentially Training Convolutional Networks for Visual Tracking
STCT模型图
MDNet: Learning Multi-Domain Convolutional Neural Networks for Visual Tracking
出发点:
大部分算法只是用在大量数据上训练好的(pretrain)的一些网络如VGG作为特征提取器,这些做法 证实利用CNN深度特征对跟踪结果有显著提升。 1、对于跟踪问题来说,CNN应该是由视频跟踪的数据训练得到的更为合理。所有的跟踪目标,虽然类别 各不相同,但其实他们应该都存在某种共性,这是需要网络去学的。 2、用跟踪数据来训练很难,因为同一个object,在某个序列中是目标,在另外一个序列中可能就是背 景,而且每个序列的目标存在相当大的差异,而且会存在各种挑战,比如遮挡、形变等等。 3、现有的很多训练好的网络主要针对的任务比如目标检测、分类、分割等的网络很大,因为他们要分 出很多类别的目标。而在跟踪问题中,一个网络只需要分两类:目标和背景。而且目标一般都相对比较 小,那么其实不需lly Training Convolutional Networks for Visual Tracking
视觉目标跟踪任务就是在给定某视频序列初始帧的目标 大小与位置的情况下,预测后续帧中该目标的大小与位置。
STCT:Sequentially Training Convolutional Networks for Visual Tracking
博士应该怎样读——从我自身的经验谈起
博士应该怎样读——从我自身的经验谈起宫辰(chen.gong@)南京理工大学计算机科学与工程学院关于如何读博士,如何成为一名优秀的博士,网上类似的帖子或文章有很多,它们都十分有道理,给了我很多的帮助和启发。
因此,在我告别博士阶段的学习时,也非常希望能够从自身的角度,将我的一些经验和观点分享给大家,这也算是对我博士阶段学习的一个总结,如有不对之处还望大家多多指正。
由于我的专业是模式识别、机器学习,因此我将主要结合本领域、本专业谈谈自己的心得和体会。
1.博士的培养目的是什么?关于这个问题,很多同学的回答可能是“掌握更多的专业知识”“发表若干高水平的论文”“博士毕业后找到好的工作”等等。
其实这些回答都有道理,但都不深刻。
实际上,读博士的根本目的在于培养独立做研究的能力。
只要你的能力得到了提升,那么获取新知识、发表高水平论文及找个好工作都是轻而易举可以得到的副产品。
这种能力包括很多方面,比如如果快速进入一个新领域、如何检索所需文献、如何将自己的idea转化为数学模型、如何合理地实施实验、如何将自己的工作写成高质量的paper发表、如何通过presentation成功地sell自己的工作等等。
只有具备了这些能力,才能够称得上是一个合格的博士毕业生,才能在毕业后独立地开展新的、自己感兴趣的科学研究,才能够成为一名基本成熟的researcher。
据我所知,目前很多国内高校都把博士的毕业条件量化为一些指标,比如要发表多少篇某某级别的文章等等。
这么做无可厚非,但是作为学生一定不能被这样的指标误导,认为读博士的最终目的就是完成几篇论文。
实际上,只要自己发现问题、解决问题的能力得到了提高,完成这些指标其实并不是什么难事儿。
2.如何确定研究方向?最近听到了一句话——“选择大于努力”,其实这句话还是有一定道理的。
一个好的研究方向能够让你在博士阶段事半功倍;反之,一个不太合适的研究方向会让你事倍功半。
那么什么是“好”的研究方向?在我看来,好的方向应当满足两个条件:一是新颖有价值,二是适合自己。
The Impact of Technology on Education

The Impact of Technology on Education The impact of technology on education has been profound in recent years. With the advancement of technology, the way students learn and teachers teach has significantly changed. In this essay, we will explore the positive and negative effects of technology on education. Firstly, technology has made learning more accessible and convenient. Students can now access a vast amount of information and resources online, allowing them to learn at their own pace and in their own time. This has also opened up opportunities for distance learning, enabling students to access education from anywhere in the world. Additionally, technology has made learning more interactive and engaging through the use of educational apps, games, and multimedia resources. On the other hand, the overreliance on technology in education has raised concerns about the potential negative impact. Some argue that technology can be a distraction in the classroom, leading to decreased attention spans and reduced critical thinking skills. Furthermore, the digital divide between students with access to technology and those without can widen educational inequalities. Despite these concerns, it is undeniable that technology has revolutionized the way education is delivered and received. Teachers now have access to a wide range of tools and platforms to enhance their teaching methods and cater to different learning styles. This has also allowed for more personalized learning experiences, as teachers can tailor their lessons to meet the individual needs of their students. Moreover, technology has also transformed the assessment and evaluation process in education. Traditional paper-based exams are being replaced by online assessments and e-portfolios, allowingfor more efficient and accurate tracking of student progress. This shift towards digital assessment has also opened up new possibilities for adaptive learning, where the curriculum can be dynamically adjusted based on the student's performance. In conclusion, the impact of technology on education is multi-faceted, with both positive and negative effects. While it has made learning more accessible and interactive, there are concerns about its potential drawbacks. However, it is clear that technology will continue to play a significant role in shaping the future of education. It is essential for educators to harness thebenefits of technology while also addressing its challenges to ensure that all students can benefit from a modern and effective education system.。
Fast Compressive Tracking

Fast Compressive TrackingKaihua Zhang,Lei Zhang,Member,IEEE,and Ming-Hsuan Yang,Senior Member,IEEE Abstract—It is a challenging task to develop effective and efficient appearance models for robust object tracking due to factors such as pose variation,illumination change,occlusion,and motion blur.Existing online tracking algorithms often update models with samples from observations in recent frames.Despite much success has been demonstrated,numerous issues remain to be addressed.First, while these adaptive appearance models are data-dependent,there does not exist sufficient amount of data for online algorithms to learn at the outset.Second,online tracking algorithms often encounter the drift problems.As a result of self-taught learning,misaligned samples are likely to be added and degrade the appearance models.In this paper,we propose a simple yet effective and efficient tracking algorithm with an appearance model based on features extracted from a multiscale image feature space with data-independent basis.The proposed appearance model employs non-adaptive random projections that preserve the structure of the image feature space of objects.A very sparse measurement matrix is constructed to efficiently extract the features for the appearance model.We compress sample images of the foreground target and the background using the same sparse measurement matrix.The tracking task is formulated as a binary classification via a naive Bayes classifier with online update in the compressed domain.A coarse-to-fine search strategy is adopted to further reduce the computational complexity in the detection procedure.The proposed compressive tracking algorithm runs in real-time and performs favorably against state-of-the-art methods on challenging sequences in terms of efficiency,accuracy and robustness.Index Terms—Visual tracking,random projection,compressive sensingÇ1I NTRODUCTIOND ESPITE that numerous algorithms have been proposedin the literature,object tracking remains a challenging problem due to appearance change caused by pose,illumi-nation,occlusion,and motion,among others.An effective appearance model is of prime importance for the success of a tracking algorithm that has attracted much attention in recent years[2],[3],[4],[5],[6],[7],[8],[9],[10],[11],[12], [13],[14],[15],[16].Numerous effective representation schemes have been proposed for robust object tracking in recent years.One commonly adopted approach is to learn a low-dimensional subspace(e.g.,eigenspace[7],[17]),which can adapt online to object appearance change.Since this approach is data-dependent,the computational complexity is likely to increase significantly because it needs eigen-decomposi-tions.Moreover,the noisy or misaligned samples are likely to degrade the subspace basis,thereby causing these algo-rithms to drift away the target objects gradually.Another successful approach is to extract discriminative features from a high-dimensional space.Since object tracking can be posed as a binary classification task which separates object from its local background,a discriminative appearance model plays an important role for its success.Online boost-ing methods[6],[10]have been proposed to extract discrim-inative features for object tracking.Alternatively,high-dimensional features can be projected to a low-dimensional space from which a classifier can be constructed.The compressive sensing(CS)theory[18],[19]shows that if the dimension of the feature space is sufficiently high, these features can be projected to a randomly chosen low-dimensional space which contains enough information to reconstruct the original high-dimensional features.The dimensionality reduction method via random projection (RP)[20],[21]is data-independent,non-adaptive and infor-mation-preserving.In this paper,we propose an effective and efficient tracking algorithm with an appearance model based on features extracted in the compressed domain[1]. The main components of the proposed compressive track-ing algorithm are shown by Fig.1.We use a very sparse measurement matrix that asymptotically satisfies the restricted isometry property(RIP)in compressive sensing theory[18],thereby facilitating efficient projection from the image feature space to a low-dimensional compressed sub-space.For tracking,the positive and negative samples are projected(i.e.,compressed)with the same sparse measure-ment matrix and discriminated by a simple naive Bayes classifier learned online.The proposed compressive track-ing algorithm runs at real-time and performs favorably against state-of-the-art trackers on challenging sequences in terms of efficiency,accuracy and robustness.The rest of this paper is organized as follows.Wefirst review the most relevant work on online object tracking in Section2.The preliminaries of compressive sensing and random projection are introduced in Section3.The proposed algorithm is detailed in Section4,and the experimental results are presented in Section5withK.Zhang is with the School of Information and Control,NanjingUniversity of Information Science&Technology,Nanjing,China.E-mail:zhkhua@.L.Zhang is with the Department of Computing,the Hong Kong PolytechnicUniversity,Hong Kong.E-mail:cslzhang@.hk.M.-H.Yang is with the Department of Electrical Engineering and Com-puter Science(EECS),School of Engineering,University of California atMerced,5200North Lake Road,Merced,CA95344.E-mail:mhyang@.Manuscript received1Feb.2013;revised11Jan.2014;accepted16Mar.2014.Date of publication6Apr.2014;date of current version10Sept.2014.Recommended for acceptance by S.Avidan.For information on obtaining reprints of this article,please send e-mail to:reprints@,and reference the Digital Object Identifier below.Digital Object Identifier no.10.1109/TPAMI.2014.23158080162-8828ß2014IEEE.Personal use is permitted,but republication/redistribution requires IEEE permission.See /publications_standards/publications/rights/index.html for more information.comparisons to state-of-the-art methods on challenging sequences.We conclude with remarks on our future work in Section6.2R ELATED W ORKRecent surveys of object tracking can be found in[22],[23], [24].In this section,we briefly review the most relevant liter-ature of online object tracking.In general,tracking algo-rithms can be categorized as either generative[2],[3][7],[9], [11],[12],[25],[26],[27],[28],[29]or discriminative[4],[5], [6],[8],[10],[30],[13],[16]based on their appearance models.Generative tracking algorithms typically learn a model to represent the target object and then use it to search for the image region with minimal reconstruction error.Black and Jepson[2]learn an offline subspace model to represent the object of interest for tracking.Reference templates based on color histogram[31],[32],integral histogram[25]have been used for tracking.In[3]Jepson et al.present a Gaussian mix-ture model with an online expectation maximization algo-rithm to handle object appearance variations during tracking.Ho et al.[17]propose a tracking method using a set of learned subspace model to deal with appearance change. Instead of using pre-trained subspace,the IVT method[7] learns an appearance model online to adapt appearance change.Kwon and Lee[9]combine multiple observation and motion models in a modified particlefiltering frame-work to handle large appearance and motion variation. Recently,sparse representation has been used in the ‘1-tracker where an object is modeled by a sparse linear com-bination of target and trivial templates[12].However,the computational complexity of the‘1-tracker is rather high, thereby limiting its applications in real-time scenarios.Li et al.[11]further extend it by using the orthogonal matching pursuit algorithm for solving the optimization problems effi-ciently,and Bao et al.[27]improve the efficiency via acceler-ated proximal gradient approach.A representation based on distribution of pixels at multiple layers is proposed to describe object appearance for tracking[29].Oron et al.[28] propose a joint model of appearance and spatial configura-tion of pixels which estimates the amount of local distortion of the target object,thereby well handling rigid and nonrigid deformations.Recently,Zhang et al.[26]propose a multi-task approach to jointly learn the particle representations for robust object tracking.Despite much demonstrated success of these online generative tracking algorithms,several prob-lems remain to be solved.First,numerous training samples cropped from consecutive frames are required in order to learn an appearance model online.Since there are only a few samples at the outset,most tracking algorithms often assume that the target appearance does not change much during this period.However,if the appearance of the target changes significantly,the drift problem is likely to occur. Second,these generative algorithms do not use the back-ground information which is likely to improve tracking sta-bility and accuracy.Discriminative algorithms pose the tracking problem as a binary classification task with local search and determine the decision boundary for separating the target object from the background.Avidan[4]extends the opticalflow approach with a support vector machine(SVM)classifier for object tracking,and Collins et al.[5]demonstrate that the most dis-criminative features can be learned online to separate the tar-get object from the background.In[6]Grabner et al.propose an online boosting algorithm to select features for tracking. However,these trackers[4],[5],[6]use one positive sample (i.e.,the current tracker location)and a few negative samples when updating the classifier.As the appearance model is updated with noisy and potentially misaligned examples, this often leads to the tracking drift problem.An online semi-supervised boosting method is proposed by Grabner et al.[8]to alleviate the drift problem in which only the samples in thefirst frame are labeled and all the other samples are unlabeled.Babenko et al.[10]formulate online tracking within the multiple instance learning framework where sam-ples are considered within positive and negative bags orsets. Fig.1.Main components of the proposed compressive tracking algorithm.A semi-supervised learning approach[33]is developed in which positive and negative samples are selected via an online classifier with structural constraints.Wang et al.[30] present a discriminative appearance model based on super-pixels which is able to handle heavy occlusions and recovery from drift.In[13],Hare et e an online structured output support vector machine for robust tracking which can mitigate the effect of wrong labeling samples.Recently, Henriques et al.[16]introduce a fast tracking algorithm which exploits the circulant structure of the kernel matrix in SVM classifier that can be efficiently computed by the fast Fourier transform algorithm.3P RELIMINARIESWe present some preliminaries of compressive sensing which are used in the proposed tracking algorithm.3.1Random Projection and Compressive Sensing In random projection,a random matrix R2R nÂm whose rows have unit length projects data from the high-dimensional feature space x2R m to a lower-dimensional space v2R nv¼Rx;(1) where n(m.Each projection v is essentially equivalent to a compressive measurement in the compressive sensing encoding stage.The compressive sensing theory[19],[34] states that if a signal is K-sparse(i.e.,the signal is a linear combination of only K basis[35]),it is possible to near per-fectly reconstruct the signal from a small number of random measurements.The encoder in compressive sensing(using (1))correlates signal with noise(using random matrix R) [19],thereby it is a universal encoding which requires no prior knowledge of the signal structure.In this paper,we adopt this encoder to construct the appearance model for visual tracking.Ideally,we expect R provides a stable embedding that approximately preserves the salient information in any K-sparse signal when projecting from x2R m to v2R n.A necessary and sufficient condition for this stable embedding is that it approximately preserves distances between any pairs of K-sparse signals that share the same K basis.That is,for any two K-sparse vectors x1and x2sharing the same K basis,ð1À Þk x1Àx2k2‘2k Rx1ÀRx2k2‘2ð1þ Þk x1Àx2k2‘2:(2)The restricted isometry property[18],[19]in compressive sensing shows the above results.This property is achieved with high probability for some types of random matrix R whose entries are identically and independently sampled from a standard normal distribution,symmetric Bernoulli distribution or Fourier matrix.Furthermore,the above result can be directly obtained from the Johnson-Linden-strauss(JL)lemma[20].Lemma1.(Johnson-Lindenstrauss lemma)[20]:Let Q be afinite collection of d points in R m.Given0< <1and b>0,let n be a positive integer such thatn!4þ2b2=2À 3=3lnðdÞ:(3) Let R2R nÂm be a random matrix with Rði;jÞ¼r ij,wherer ij¼þ1;with probability12;À1;with probability12;&(4)orr ij¼ffiffiffi3pÂþ1;with probability16;0;with probability23;À1;with probability16:8<:(5)Then,with probability exceeding1ÀdÀb,the following state-ment holds:For every x1;x22Q,ð1À Þk x1Àx2k2‘21ffiffiffinp k Rx1ÀRx2k2‘2ð1þ Þk x1Àx2k2‘2:(6)Baraniuk et al.[36]prove that any random matrix sat-isfying the Johnson-Lindenstrauss lemma also holds true for the restricted isometry property in compressive sens-ing.Therefore,if the random matrix R in(1)satisfies the JL lemma,x can be reconstructed with minimum error from v with high probability if x is K-sparse(e.g.,audio or image signals).This strong theoretical support moti-vates us to analyze the high-dimensional signals via their low-dimensional random projections.In the proposed algorithm,a very sparse matrix is adopted that not only asymptotically satisfies the JL lemma,but also can be effi-ciently computed for real-time tracking.3.2Very Sparse Random Measurement MatrixA typical measurement matrix satisfying the restricted isom-etry property is the random Gaussian matrix R2R nÂm where r ij$Nð0;1Þ(i.e.,zero mean and unit variance),as used in recent work[11],[37],[38].However,as the matrix is dense,the memory and computational loads are very expen-sive when m is large.In this paper,we adopt a very sparse random measurement matrix with entries defined asr ij¼ffiffiffirpÂ1;with probability12r;0;with probability1À1r;À1;with probability12r:8><>:(7)Achlioptas[20]proves that this type of matrix with r¼1or 3satisfies the Johnson-Lindenstrauss lemma(i.e.,(4)and (5)).This matrix is easy to compute which requires only a uniform random generator.More importantly,when r¼3, it is sparse where two thirds of the computation can be avoided.In addition,Li et al.[39]show that for r¼oðmÞ(x2R m),the random projections are almost as accurate as the conventional random projections where r ij$Nð0;1Þ. Therefore,the random matrix(7)with r¼oðmÞasymptoti-cally satisfies the JL lemma.In this work,we set r¼oðmÞ¼m=ða log10ðmÞÞ¼m=ð10aÞ$m=ð6aÞwith afixed constant a because the dimensionality m is typically in the order of106 to1010.For each row of R,only about c¼ð12rþ12rÞÂm¼a log10ðmÞ10a nonzero entries need to be computed.We observe that good results can be obtained by fixing a ¼0:4in our experiments.Therefore,the computational complexity is only o ðcn Þ(n ¼100in this work)which is very low.Furthermore,only the nonzero entries of R need to be stored which makes the memory requirement also very light.4P ROPOSED A LGORITHMIn this section,we present the proposed compressive track-ing algorithm in details.The tracking problem is formulated as a detection task and the main steps of the proposed algo-rithm are shown in Fig.1.We assume that the tracking win-dow in the first frame is given by a detector or manual label.At each frame,we sample some positive samples near the current target location and negative samples away from the object center to update the classifier.To predict the object location in the next frame,we draw some samples around the current target location and determine the one with the maximal classification score.4.1Image RepresentationTo account for large scale change of object appearance,a multiscale image representation is often formed by convolv-ing the input image with a Gaussian filter of different spa-tial variances [40].The Gaussian filters in practice have to be truncated which can be replaced by rectangle filters.Bay et al.[41]show that this replacement does not affect the per-formance of the interest point detectors but can significantly speed up the detectors via integral image method [42].For each sample Z 2R w Âh ,its multiscale representation (as illustrated in Fig.2)is constructed by convolving Z with a set of rectangle filters at multiple scales f F 1;1;...;F w;h g defined byF w;h ðx;y Þ¼1wh Â1;1 x w ,1 y h;0;otherwise ;&(8)where w and h are the width and height of a rectangle fil-ter,respectively.Then,we represent each filtered image as a column vector in R wh and concatenate these vectors as a very high-dimensional multiscale image feature vector x ¼ðx 1;...;x m Þ>2R m where m ¼ðwh Þ2.The dimensionality m is typically in the order of 10to 1010.We adopt asparse random matrix R in (7)to project x onto a vector v 2R n in a low-dimensional space.The random matrix R needs to be computed only once offline and remains fixed throughout the tracking process.For the sparse matrix R in (7),the computational load is very light.As shown in Fig.3,we only need to store the nonzero entries in R and the positions of rectangle filters in an input image corre-sponding to the nonzero entries in each row of R .Then,v can be efficiently computed by using R to sparsely mea-sure the rectangular features which can be efficiently computed using the integral image method [42].4.2Analysis of Compressive Features 4.2.1Relationship to the Haar-Like FeaturesAs shown in Fig.3,each element v i in the low-dimensional feature v 2R n is a linear combination of spatially distrib-uted rectangle features at different scales.Since the coeffi-cients in the measurement matrix can be positive or negative (via (7)),the compressive features compute the rel-ative intensity difference in a way similar to the generalized Haar-like features [10](See Fig.3).The Haar-like features have been widely used for object detection with demon-strated success [10],[42],[43].The basic types of these Haar-like features are typically designed for different tasks [42],[43].There often exist a very large number of Haar-like fea-tures which make the computational load very heavy.This problem is alleviated by boosting algorithms for selecting important features [42],[43].Recently,Babenko et al.[10]adopt the generalized Haar-like features where each one is a linear combination of randomly generated rectangle fea-tures,and use online boosting to select a small set of them for object tracking.In this work,the large set of Haar-like features are compressively sensed with a very sparse mea-surement matrix.The compressive sensing theories ensure that the extracted features of our algorithm preserve almost all the information of the original image,and hence is able to correctly classify any test image because the dimension of the feature space is sufficiently large (106to 1010)[37].Therefore,the projected features can be classified in the compressed domain efficiently and effectively without the curse of dimensionality.4.2.2Scale Invariant PropertyIt is easy to show that the low-dimensional feature v is scale invariant.As shown in Fig.3,each feature in v is a linear combination of some rectangle filters convolving the input image at different positions.Therefore,withoutFig.2.Illustration of multiscale imagerepresentation.Fig.3.Graphical representation of compressing a high-dimensional vec-tor x to a low-dimensional vector v .In the matrix R ,dark,gray and white rectangles represent negative,positive,and zero entries,respectively.The blue arrows illustrate that one of nonzero entries of one row of R sensing an element in x is equivalent to a rectangle filter convolving the intensity at a fixed position of an input image.loss of generality,we only need to show that the j th rect-angle feature x j in the i th feature v i in v is scale invariant.From Fig.4,we havex j ðs y Þ¼F sw j ;sh j ðs y Þ Z ðs y Þ¼F sw j ;sh j ða Þ Z ða Þj a ¼s y¼1s 2w i h i Z u 2V sZ ða Àu Þd u ¼1s 2w i h i Z u 2VZ ðy Àu Þj s 2j d u ¼1w i h i Z u 2VZ ðy Àu Þd u ¼F w j ;h j ðy Þ Z ðy Þ¼x j ðy Þ;where V ¼fðu 1;u 2Þj 1 u 1 w i ;1 u 2 h i g and V s ¼fðu 1;u 2Þj 1 u 1 sw i ;1 u 2 sh i g .4.3Classifier Construction and UpdateWe assume all elements in v are independently distributed and model them with a naive Bayes classifier [44],H ðv Þ¼log Q n i ¼1p ðv i j y ¼1Þp ðy ¼1ÞQ ni ¼1p ðv i j y ¼0Þp ðy ¼0Þ¼X n i ¼1log p ðv i j y ¼1Þp ðv i j y ¼0Þ ;(9)where we assume uniform prior,p ðy ¼1Þ¼p ðy ¼0Þ,andy 2f 0;1g is a binary variable which represents the sample label.Diaconis and Freedman [45]show that random projec-tions of high dimensional random vectors are almost always Gaussian.Thus,the conditional distributions p ðv i j y ¼1Þand p ðv i j y ¼0Þin the classifier H ðv Þare assumed to beGaussian distributed with four parameters ðm 1i ;s 1i ;m 0i ;s 0i Þ,p ðv i j y ¼1Þ$N Àm 1i ;s 1iÁ;p ðv i j y ¼0Þ$N Àm 0i ;s 0i Á;(10)where m 1i (m 0i )and s 1i (s 0i )are mean and standard deviation of the positive (negative)class.The scalar parameters in (10)are incrementally updated bym 1i m 1i þð1À Þm1s 1i ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi Às 1i Á2þð1À Þðs 1Þ2þ ð1À ÞÀm 1i Àm 1Á2q ;(11)where >0is a learning parameter,s 1¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1n P n À1k ¼0j y ¼1ðv i ðk ÞÀm 1Þ2q and m 1¼1n P n À1k ¼0j y ¼1v i ðk Þ.Parameters m 0i and s 0i are updated with similar rules.The above equations can be easily derived by maximum likelihood estimation [46].Fig.5shows the probability distributions for three different fea-tures of the positive and negative samples cropped from a few frames of a sequence for clarity of presentation.It shows that a Gaussian distribution with online update using (11)is a good approximation of the features in the projected space where samples can be easily separated.Because the variables are assumed to be independent in our classifier,the n -dimensional multivariate problem is reduced to the n univariate estimation problem.Thus,it requires fewer training samples to obtain accurate estima-tion than estimating the covariance matrix in the multivari-ate estimation.Furthermore,several densely sampled positive samples surrounding the current tracking result are used to update the distribution parameters,which is able to obtain robust estimation even when the tracking result has some drift.In addition,the useful information from the former accurate samples is also used to update the parameter distributions,thereby facilitating the proposed algorithm to be robust to misaligned samples.Thus,our classifier performs robustly even when the misaligned or the insufficient number of training samples are used.4.4Fast Compressive TrackingThe aforementioned classifier is used for local search.To reduce the computational complexity,a coarse-to-fine slid-ing window search strategy is adopted (See Fig.6).The main steps of our algorithm are summarized in Algorithm 1.First,we search the object location based on the previous object location by shifting the window with a large numberofFig.4.Illustration of scale invariant property of low-dimensional features.From the left figure to the right one,the ratio is s .Red rectangle repre-sents the j th rectangle feature at position y.Fig.5.Probability distributions of three different features in a low-dimen-sional space.The red stair represents the histogram of positive samples while the blue one represents the histogram of negative samples.The red and blue lines denote the corresponding estimated distributions by the proposed incremental updatemethod.Fig.6.Coarse-to-fine search for new object location.Left:object center location (denoted by red solid circle)at the t th frame.Middle:coarse-grained search with a large radius g c and search step D c based on the previous object location.Right:fine-grained search with a small radius g f <g c and search step D f <D c based on the coarse-grained search location (denoted by green solid circle).The final object location is denoted by blue solid circle.pixels D c within a large search radius g c.This generates fewer windows than locally exhaustive search method(e.g., [10])but the detected object location may be slightly inaccu-rate but close to the accurate object location.Based on the coarse-grained detected location,fine-grained search is car-ried out with a small number of pixels D f within a small search radius g f.For example,we set g c¼25,D c¼4,and g f¼10,D f¼1in all the experiments.If we use thefine-grained locally exhaustive method with g c¼25and D f¼1, the total number of search windows is about1,962(i.e.,pg2c). However,using this coarse-to-fine search strategy,the total number of search windows is about436(i.e.,pg2c=16þpg2f), thereby significantly reducing computationalcost.4.4.1Multiscale Fast Compressive TrackingAt each location in the search region,three image patches are cropped at different scale s:current(s¼1),small (s¼1Àd)and large scale(s¼1þd),to account for appear-ance variation due to fast scale change.The template of each rectangle feature for patch with scale s is multiplied by ratio s(See Fig.4).Therefore,the feature v s for each patch with scale s can be efficiently extracted by using the integral image method[42].Since the low-dimensional features for each image patch are scale invariant,we have v s t¼arg max v2F HðvÞ%v tÀ1,where v tÀ1is the low-dimensional feature vector that represents the object in the (tÀ1)th frame,and F is the set of low-dimensional features extracted from image patches at different scales.The classi-fier is updated with cropped positive and negative samples based on the new object location and scale.The above pro-cedures can be easily integrated into Algorithm1:the scale is updated everyfifth frame in thefine-grained search pro-cedure(See Step4in Algorithm1),which is a tradeoff between computational efficiency and effectiveness of han-dling appearance change caused by fast scale change.4.5DiscussionWe note that simplicity is the prime characteristic of the proposed algorithm in which the proposed sparse measure-ment matrix R is independent of training samples,thereby resulting in an efficient method.In addition,the proposed algorithm achieves robust performance as discussed below.Difference with related work.It should be noted that the proposed algorithm is different from recent work based on sparse representation[12]and compressive sensing [11].First,both algorithms are generative models that encode an object sample by sparse representation of tem-plates using‘1-minimization.Thus the training samples cropped from the previous frames are stored and updated,but this is not required in the proposed algo-rithm due to the use of a data-independent measurement matrix.Second,the proposed algorithm extracts a linear combination of generalized Haar-like features and other trackers[12],[11]use sparse representations of holistic templates which are less robust as demonstrated in the experiments.Third,both tracking algorithms[12],[11] need to solve numerous time-consuming‘1-minimization problems although one method has been recently pro-posed to alleviate the problem of high computational complexity[27].In contrast,the proposed algorithm is efficient as only matrix multiplications are required.The proposed method is different from the MIL tracker [10]as itfirst constructs a feature pool in which each feature is randomly generated as a weighted sum of pixels in two to four rectangles.A subset of most discriminative features are then selected via an MIL boosting method to construct thefinal strong classifier.However,as the adopted mea-surement matrix of the proposed algorithm satisfies the JL lemma,the compressive features can preserve the‘2dis-tance of the original high-dimensional features.Since each feature that represents a target or background sample is assumed to be independently distributed with a Gaussian distribution,the feature vector for each sample is modeled as a mixture of Gaussian(MoG)distribution.The MoG dis-tribution is essentially a mixture of weighted‘2distances of Gaussian distributions.Thus,the‘2distance between the target and background distributions is preserved in the compressive feature space,and the proposed algorithm can obtain favorable results without further learning the dis-criminative features from the compressive feature space.Discussion with the online AdaBoost method(OAB)[6].The reasons that our method performs better than the OAB method can be attributed to the following factors.First,to reduce the computational complexity,the feature pool size designed by the OAB method is small(less than250accord-ing to the default setting in[6]which may contain insuffi-cient discriminative features.However,our compressive features can preserve the intrinsic discriminative strength of the original high-dimensional multiscale features,i.e.,large (between106and1010)feature space.Therefore,our com-pressive features have better discriminative capability than the Haar-like features used by the OAB method.Second, the proposed method uses several positive samples(patches close to the tracking result at any frame)for online update of the appearance model which alleviates the errors intro-duced by inaccurate tracking locations,whereas the OAB method only uses one positive sample(i.e.,the tracking。
我的奇思妙想英语作文三百字多功能眼镜

我的奇思妙想英语作文三百字多功能眼镜全文共3篇示例,供读者参考篇1My Fanciful Idea: A Multi-Function Glasses EssayHave you ever wished you could have x-ray vision like Superman? Or maybe you've dreamed of being able to record everything you see and experience to watch back later? Well, with my innovative idea for multi-function glasses, thatfar-fetched fantasy could become a reality!Just imagine putting on a regular pair of glasses, but instead of them just helping you see better, they unlock a world of possibilities right before your eyes. These high-tech spectacles would be a compact, all-in-one visual wearable device packed with an array of mindblowing features.First off, the glasses would have built-in x-ray vision capabilities. With just the push of a button or voice command, the lenses would shift into x-ray mode, allowing you to see through solid objects! This would be incredibly useful for things like looking inside walls to spot studs before hammering in a nailor even getting a peek at what's really inside those Christmas presents before opening them.But x-ray vision is just the start. The glasses would also double as a high-definition video camera capable of recording every moment in stunningly clear quality. Imagine capturing priceless memories or crucial events without ever having to fumble with a separate camera. And with machine learning technology built-in, the camera could even automatically edit and compile your footage into stylish videos ready to share.Speaking of sharing, these smart glasses would of course sync wirelessly to your smartphone or other devices. You could seamlessly transfer files, stream videos right to the lenses, or even surf the web and engage with apps through easy voice controls and motion tracking sensors. No more squinting at that tiny phone screen!For students and learners, the potential of thesemulti-function glasses is truly limitless. They could scan and digitize entire textbooks in an instant for easier reading and searching. Or you could use augmented reality overlays to visually diagram complex concepts and processes right before your eyes. Language learning would be a breeze too by instantly translating any foreign text and speech.As if all that wasn't futuristic enough, the glasses would also pack serious security and privacy capabilities. Built-in face recognition and iris scanning could provide the ultimate identity protection and access control. You could even go into spy mode with signal jamming tech to block cameras, mics, and wireless communications for completely secure meetings or situations.Of course, a device this powerful doesn't come without concerns over safety and ethics. That's why my smart glasses concept prioritizes safeguards and user control. All data would be encrypted and private by default. Recording, scanning, and enhanced vision modes would require voice or gesture confirmation to activate. And there would be automatic content filtering to block access to anything unsafe or unsavory.Some may think a product like this belongs in a sci-fi movie and not the real world. But I believe that with the rapid pace of technological development, multi-function smart glasses could be just around the corner. They could revolutionize how we perceive and interact with the world in our daily lives.Just imagine the infinite possibilities - fromenhancing education and productivity to upgrading entertainment and social experiences to even saving lives with emergency response vision. All that potential packed into one simple pair of glasses. Itmay sound fanciful now, but I'm confident these multi-talented smart specs could be the next major computing platform of the future. Who's ready to put them on and see the world in brilliant new ways?篇2My Imaginative English Composition: The Multifunctional GlassesHave you ever wished you could have x-ray vision or laser beams shooting from your eyes? Well, with my incredible invention of multifunctional glasses, that sci-fi fantasy could become a reality! These high-tech spectacles would be the coolest and most useful gadget ever made.First off, the frame would be made of a lightweight but super durable metal alloy to prevent any breaking or bending. The temples (arm pieces) could extend and retract to fit any head size. The lenses themselves would be transparent smart screens that display information with just a voice command or blink of the eye. You could surf the internet, watch movies, get directions, and so much more – all hands-free!But that's just the start of the amazing capabilities. The multifunctional glasses would have built-in cameras to recordvideos and take pictures with incredible zoom capabilities. They could scan any text and instantly translate it into dozens of languages. Want to learn a new language? The glasses could provide real-time subtitles for any foreign speech you hear.For students like me, these glasses would make studying a breeze. You could view PowerPoint slides, make notes, and have lessons projected right before your eyes during class. No more straining to see the board or rushing to copy down information. The glasses could even scan printed pages and make the text bigger or smaller with voice commands.Imagine wearing these glasses on vacation to get information about any monument, building, or landmark you look at. The possibilities for travel, learning, and exploration would be endless. They could identify any plant, animal, or object in your vision by scanning it.But that's not all – these glasses could also have x-ray vision capabilities! With the push of a button, you could see through thin surfaces like walls or clothing. This would be great for builders to spot leaks or wiring issues. Parents could even use it to scan for hazards around the house. Although, I probably wouldn't want my parents to have x-ray vision when I'm a teenager – talk about no privacy!Of course, the multifunctional glasses would have tons of fun tricks too. You could make your eyes appear to glow in different colors by adjusting the tint of the lenses. Maybe one day they could even project holograms or laser light displays to make your very own 3D movie experience anywhere.The battery would be solar-powered for unlimited usage, and the frames could come in all sorts of stylish designs. Everything from classic professional looks to super futuristic Cyclops visors would be available.With endless customizable features and limitless potential uses, I'm sure my multifunctional glasses would revolutionize the way we see and interact with the world around us. These could easily become one of the most important technological breakthroughs of the 21st century. Who wouldn't want a pair of these ultra high-tech spectacles to assist with work, study, and play?I may just be a student now, but perhaps I'll take my wild idea for multifunctional glasses and turn it into an actual invention one day. Then again, by the time I'm an adult, maybe this kind of wearable technology will already exist. A kid can dream though, right? I'll keep letting my imagination run wildand who knows what amazingly brilliant concept I'll think of next!篇3My Whimsical Thoughts: The Multi-Purpose GlassesHave you ever imagined a world where glasses could do more than just help you see better? A world where your spectacles become a multi-functional device that enhances your everyday life? Well, let me take you on a journey through my whimsical thoughts and introduce you to the multi-purpose glasses of the future!These futuristic glasses aren't just for correcting vision; they're a technological marvel that combines cutting-edge features into a sleek and stylish frame. Imagine waking up in the morning, and as you put on your glasses, a holographic display appears before your eyes, providing you with the day's weather forecast, your schedule, and any important notifications. No more fumbling for your phone or tablet – your glasses have got you covered.But that's just the tip of the iceberg! These multi-purpose glasses have built-in augmented reality capabilities, allowing you to seamlessly integrate digital information into your real-worldsurroundings. Need directions? Simply look around, and your glasses will overlay turn-by-turn navigation onto the streets and buildings around you. Want to learn more about that historic monument you're standing in front of? Just give a voice command, and your glasses will display relevant information, making every outing an educational experience.Speaking of voice commands, these glasses are equipped with advanced speech recognition technology, enabling you to control various functions hands-free. Need to send a message or make a call? Simply say the words, and your glasses will take care of the rest. No more fumbling with tiny keyboards or touchscreens – your voice is the ultimate controller.But wait, there's more! Imagine being able to capture and record precious moments with just a blink of an eye. These multi-purpose glasses have built-in cameras that can takehigh-quality photos and videos, allowing you to document your life effortlessly. Want to livestream an event or share a special moment with friends and family in real-time? Your glasses have got you covered there too!And let's not forget about entertainment! With these glasses, you can enjoy a private cinematic experience wherever you go. Want to watch the latest blockbuster while waiting in line? Noproblem! Your glasses can project a virtual screen right before your eyes, providing an immersive viewing experience that will make you forget your surroundings.But what about health and fitness? These multi-purpose glasses have got you covered there too! They can track your heart rate, monitor your sleep patterns, and even providereal-time feedback on your physical activities. Imagine having a personal trainer right in front of your eyes, guiding you through your workout routines and keeping you motivated every step of the way.Of course, with such advanced technology, security and privacy are of utmost importance. These glasses will incorporate cutting-edge encryption and biometric authentication measures to ensure that your personal data remains safe and secure.Now, I know what you're thinking – "Isn't this all just a pipe dream?" Well, my friends, the future is closer than you think. With the rapid advancements in technology, what seems like a whimsical thought today could very well become a reality tomorrow.So, let your imagination run wild, and embrace the possibilities that these multi-purpose glasses have to offer. Whoknows? Perhaps one day, we'll all be wearing these technological marvels, and the world as we know it will never be the same.。
多目标跟踪算法及实现研究
多目标跟踪算法及实现研究一、本文概述Overview of this article随着计算机视觉技术的快速发展,多目标跟踪算法已成为该领域的研究热点之一。
多目标跟踪旨在从视频序列中识别并持续跟踪多个目标对象,是许多实际应用如智能监控、人机交互、自动驾驶等不可或缺的关键技术。
本文旨在深入研究和探讨多目标跟踪算法的原理、发展现状以及实际应用。
With the rapid development of computer vision technology, multi-objective tracking algorithms have become one of the research hotspots in this field. Multi object tracking aims to identify and continuously track multiple target objects from video sequences, and is an indispensable key technology in many practical applications such as intelligent monitoring, human-computer interaction, and autonomous driving. This article aims to conduct in-depth research and exploration on the principles, current development status, and practical applications of multi-objective tracking algorithms.本文将对多目标跟踪算法的基本框架和关键技术进行概述,包括目标检测、数据关联、轨迹预测等核心组件。
文章将重点介绍当前主流的多目标跟踪算法,如基于滤波的方法、基于深度学习的方法等,并分析它们的优缺点和适用场景。
iDS-2CD7A26G0-IZHS(Y) 2 MP IR Varifocal Bullet Net

iDS-2CD7A26G0-IZHS(Y)2 MP IR Varifocal Bullet Network Camera⏹⏹ High quality imaging with 2 MP resolution⏹Excellent low-light performance via DarkFighter technology ⏹Clear imaging against strong back light due to 140 dB WDR technology⏹Efficient H.265+ compression technology to save bandwidth and storage⏹5 streams to meet a wide variety of applications ⏹Water and dust resistant (IP67) and vandal proof (IK10)FunctionFace RecognitionWith embedded deep learning based algorithms, the camera is able to give the best shot of a target face through detecting, tracking, capturing, grading and selecting. The camera captures the face and outputs the features, such as gender, age, and expression. The camera uses face exposure function to dynamically adjust face area exposure of captures and ensures high face picture quality.Perimeter ProtectionWith embedded deep learning based target detection and classification algorithms, the camera carries out the duty of perimeter protection, monitoring the actions of line crossing, intrusion, region entrance, and region exiting. The algorithms greatly filter out the mistaken alarm caused by the interference of leafs, lights, animal, flag, etc.Multi-Target-Type RecognitionWith the embedded deep learning algorithms, the camera detects and captures the face, human body, vehicle in the specified region and outputs the features, such as gender, age, top color, and vehicle type.SpecificationCameraImage Sensor 1/1.8" Progressive Scan CMOSMax. Resolution 1920 × 1080Min. Illumination Color: 0.0005 Lux @ (F1.2, AGC ON); B/W: 0.0001 Lux @ (F1.2, AGC ON), 0 Lux with IR Shutter Time 1 s to 1/100,000 sDay & Night IR cut filterBlue glass module to reduce ghost phenomenonLensFocal Length & FOV 2.8 to 12 mm, horizontal FOV: 114.5° to 41.8°, vertical FOV: 59.3° to 23.6°, diagonal FOV: 141.1° to 48°8 to 32 mm, horizontal FOV: 42.5° to 15.1°, vertical FOV: 23.3° to 8.64°, diagonal FOV: 49.6° to 17.3°Focus Auto, semi-auto, manual Iris Type P-irisAperture 2.8 to 12 mm: F1.2 to F2.5 8 to 32 mm: F1.7 to F1.73DORIDORI Wide:2.8 to 12 mm: D: 45 m, O: 17.9 m, R: 9 m, I: 4.5 m8 to 32 mm: D: 112.7 m, O: 44.8 m, R: 22.6 m, I: 11.3 m Tele:2.8 to 12 mm: D: 111.8 m, O: 44.3 m, R: 22.4 m, I: 11.2 m 8 to 32 mm: D: 300 m, O: 119.0 m, R: 60 m, I: 30 mIlluminatorIR Wavelength 850 nm Smart Supplement Light YesSupplement Light Range 2.8 to 12 mm: 50 m 8 to 32 mm: 100 mSupplement Light Type IR VideoMain Stream 50 Hz: 50 fps (1920 × 1080, 1280 × 960, 1280× 720) 60 Hz: 60 fps (1920 × 1080, 1280 × 960, 1280× 720)Sub-Stream 50 Hz: 25 fps (704 × 480, 640 × 480) 60 Hz: 30 fps (704 × 480, 640 × 480)Third Stream 50 Hz: 25 fps (1920 × 1080, 1280 × 720, 704 × 480, 640 × 480) 60 Hz: 30 fps (1920 × 1080, 1280 × 720, 704 × 480, 640 × 480)Fourth Stream 50 Hz: 25 fps (704 × 480, 640 × 480) 60 Hz: 30 fps (704 × 480, 640 × 480)Video Bit Rate 32 Kbps to 8 MbpsFifth Stream 50 Hz: 25 fps (704 × 480, 640 × 480) 60 Hz: 30 fps (704 × 480, 640 × 480)Video Compression H.265+/H.265/H.264+/H.264/MJPEG H.264 Type Baseline Profile/Main Profile/High ProfileH.265 Type Baseline Profile/Main Profile/High Profile Bit Rate Control CBR/VBRScalable Video Coding (SVC) H.264 and H.265 encodingRegion of Interest (ROI) 4 fixed regions for main stream, sub-stream, third stream, fourth stream and fifth streamTarget Cropping YesAudioAudio Sampling Rate 8 kHz/16 kHz/32 kHz/44.1 kHZ/48 kHzAudio Bit Rate 64 Kbps (G.711)/16 Kbps (G.722.1)/16 Kbps (G.726)/32 to 192 Kbps (MP2L2)/16 to 64 Kbps (AAC) /8 to 320 Kbps (MP3)Audio Compression G.711/G.722.1/G.726/MP2L2/PCM/AAC/MP3 Audio Type Mono soundEnvironment Noise Filtering YesNetworkProtocols TCP/IP, ICMP, HTTP, HTTPS, FTP, LLDP, SFTP, SRTP, DHCP, DNS, DDNS, RTP, RTSP, RTCP, PPPoE, NTP,UPnP, SMTP, SNMP, IGMP, 802.1X, QoS, IPv6, IPv4, UDP, Bonjour, SSL/TLSSimultaneous Live View Up to 20 channelsAPI Open Network Video Interface (PROFILE S, PROFILE G, PROFILE T), ISAPI, SDK, ISUPUser/Host Up to 32 users3 user levels: administrator, operator, and userSecurity Password protection, complicated password, HTTPS encryption, 802.1X authentication (EAP-TLS, EAP-LEAP, EAP-MD5), watermark, IP address filter, basic and digest authentication for HTTP/HTTPS, WSSE and digest authentication for Open Network Video Interface, RTP/RTSP OVER HTTPS, Control Timeout Settings, Security Audit Log, TLS 1.2Network Storage NAS (NFS, SMB/CIFS), auto network replenishment (ANR)Together with high-end Hikvision memory card, memory card encryption and health detection are supported.Client iVMS-4200, Hik-ConnectWeb Browser Plug-in required live view: IE9+, Chrome 41.0 to 44, Firefox 30.0 to 51, Safari 8.0 to 11 Plug-in free live view: Chrome 45.0+, Firefox 52.0+Not recommended: Safari 11+, EdgeImageImage Parameters Switch YesImage Settings Saturation, brightness, contrast, sharpness, white balance, and AGC adjustable by client software or web browserDay/Night Switch Day, Night, Auto, Schedule, Alarm TriggerWide Dynamic Range (WDR) 140 dBImage Enhancement BLC, HLC, Defog, 3D DNRSNR ≥ 52 dBPrivacy Mask 8 programmable polygon privacy masks, mask color or mosaic configurable Image Stabilization EISPicture Overlay LOGO picture can be overlaid on video with 128 × 128 24bit bmp format InterfaceVideo Output 1 Vp-p Composite Output (75Ω/CVBS) (Only for debugging)Ethernet Interface 1 RJ45 10 M/100 M/1000 M self-adaptive Ethernet portOn-Board Storage Built-in memory card slot, support microSD/microSDHC/microSDXC card, up to 256 GB Audio With -Y: 1 input (line in), 1 output (line out), 3.5 mm connectorAlarm 2 input, 2 outputs (max. 24 VDC, 1 A)RS-485 With -Y: 1 RS-485 (half duplex, HIKVISION, Pelco-P, Pelco-D, self-adaptive)Reset Key YesPower Output With -Y: 12 VDC, max. 100 mAEventBasic Event Motion detection, video tampering alarm, exception (network disconnected, IP address conflict, illegal login, abnormal reboot, HDD full, HDD error), video quality diagnosis, vibration detectionLinkage Upload to FTP/NAS/memory card, notify surveillance center, send email, trigger alarm output, trigger recording, trigger captureSmart Event Line crossing detection, intrusion detection, region entrance detection, region exiting detection, audio exception dettection, scene change detection, defocus detectionDeep Learning FunctionMulti-target-type Detection Supports simultaneous detection and capture of human body, face and vehicle Gets 7 face features, 13 human body features and 2 vehicle featuresFace Capture 1. Detects up to 60 faces simultaneously2. Supports swing left and right from -60° to 60°, tilt up and down from -30° to 30°3. Uploads face with background and closed-up face picturesFace Comparison Up to 10 face libraries. Up to 150,000 faces for each library. 150,000 faces in total. Supports face library encryptionPerimeter Protection Line crossing, intrusion, region entrance, region exitingSupport alarm triggering by specified target types (human and vehicle)GeneralMaterial Aluminum alloy bodyPower 12 VDC ± 20%, three-core terminal block, 1.19 A, max. 14.28 WPoE: 802.3at, Type 2, Class 4, 42.5 V to 57 V), 0.396 A to 0. 295 A, max. 16.8 WDimension Without -Y: Ø144 × 347 mm (Ø5.7" × 13.7") With -Y: Ø140 × 351 mm (Ø5.5" × 13.8")Package Dimension 405 × 190 × 180 mm (15.9" × 7.5" × 7.1")Weight Approx. 1950 g (4.2 lb.)With Package Weight Approx. 3070 g (6.7 lb.)Startup and OperatingConditions-40 °C to 60 °C (-40 °F to 140 °F). Humidity 95% or less (non-condensing) Storage Conditions -30 °C to 60 °C (-22 °F to 140 °F). Humidity 95% or less (non-condensing)Language 33 languages: English, Russian, Estonian, Bulgarian, Hungarian, Greek, German, Italian, Czech, Slovak, French, Polish, Dutch, Portuguese, Spanish, Romanian, Danish, Swedish, Norwegian, Finnish, Croatian, Slovenian, Serbian, Turkish, Korean, Traditional Chinese, Thai, Vietnamese, Japanese, Latvian, Lithuanian, Portuguese (Brazil), UkrainianGeneral Function Heartbeat, mirror, password protection, watermark, privacy mask, IP address filter, one-key reset, five streamsInstallation Adjustment Pan, Tilt, Rotate Heater YesApprovalEMCFCC (47 CFR Part 15, Subpart B);CE-EMC (EN 55032: 2015, EN 61000-3-2:2019, EEN 61000-3-3:2013+A1:2019, EN50130-4: 2011 +A1: 2014); RCM (AS/NZS CISPR 32: 2015); IC (ICES-003: Issue 7); KC (KN 32: 2015, KN 35: 2015) SafetyUL (UL 62368-1);CB (IEC 62368-1:2014+A11);CE-LVD (EN 62368-1:2014/A11:2017);BIS (IS 13252(Part 1):2010/ IEC 60950-1 : 2005); LOA (IEC/EN 60950-1) Environment CE-RoHS (2011/65/EU);WEEE (2012/19/EU);Reach (Regulation (EC) No 1907/2006) ProtectionIK10 (IEC 62262:2002), IP67 (IEC 60529-2013) Anti-Corrosion Protection With -Y: NEMA 4X(NEMA 250-2018) Automotive and Railway EN50121-4 OtherPVC FREE⏹Typical ApplicationHikvision products are classified into three levels according to their anti-corrosion performance. Refer to the following description to choose for your using environment.-Y model: This model has MODERATE PROTECTION. Without -Y model: This model has NO SPECIFIC PROTECTION.LevelDescriptionTop-level protectionHikvision products at this level are equipped for use in areas where professional anti-corrosion protection is a must. Typical application scenarios include coastlines, docks, chemical plants, and more.Moderate protectionHikvision products at this level are equipped for use in areas with moderate anti-corrosion demands. Typical application scenarios include coastal areas about 2 kilometers (1.24 miles) away from coastlines, as well as areas affected by acid rain.No specific protectionHikvision products at this level are equipped for use in areas where no specific anti-corrosion protection is needed.⏹Available ModeliDS-2CD7A26G0-IZHSY (2.8 to 12 mm, 8 to 32 mm) iDS-2CD7A26G0-IZHS (2.8 to 12 mm, 8 to 32 mm)⏹Dimension⏹Accessory⏹OptionalDS-1475ZJ-SUSVertical PoleMountDS-1475ZJ-YVertical Pole MountDS-1476ZJ-SUS Corner MountDS-1476ZJ-Y Corner Mount。
万星火箭英语伴学流程
IntroductionWanxing Rocket English, an innovative and comprehensive language learning platform, has meticulously designed a study companion process that ensures learners attain fluency in English with utmost efficiency and effectiveness. This detailed, multi-faceted approach combines cutting-edge technology, expert pedagogy, and personalized learning strategies to cater to diverse learning styles and goals. This essay delves into the various components and features of this high-quality, rigorous study process, which spans over 1339 words.1. **Initial Assessment and Personalized Learning Plan**The journey begins with a thorough diagnostic assessment, encompassing grammar, vocabulary, reading comprehension, listening, writing, and speaking skills. This evaluation not only determines the learner's current English proficiency level but also identifies their strengths, weaknesses, and learning preferences. Based on these insights, Wanxing Rocket English generates a highly tailored learning plan, outlining specific milestones, targeted areas for improvement, and recommended learning resources.2. **Structured Curriculum and Progressive Learning Modules**Wanxing Rocket English offers a meticulously structured curriculum aligned with international standards such as CEFR (Common European Framework of Reference for Languages) and TOEFL/IELTS requirements. The curriculum is divided into progressive modules, each focusing on specific language aspects, themes, or skill sets. These modules ensure a logical progression from basic to advanced levels, allowing learners to build a strong foundation and gradually expand their knowledge and abilities.3. **Interactive Lessons and Multimedia Content**Leveraging state-of-the-art educational technology, Wanxing Rocket English provides engaging, interactive lessons incorporating multimedia elements such as videos, animations, podcasts, and interactive quizzes. These resources cater to different learning modalities, ensuring content is both enjoyable and effectively retained. Additionally, the platform incorporates real-lifescenarios and authentic materials, fostering practical language usage and cultural understanding.4. **Expert Tutors and Live Sessions**A distinguishing feature of Wanxing Rocket English is its dedicated team of experienced, native-speaking tutors. They conduct live sessions, including one-on-one tutorials, group discussions, and workshops, where learners receive personalized feedback, guidance, and opportunities for active practice. These sessions facilitate immediate error correction, pronunciation refinement, and conversational fluency development, bridging the gap between theory and practical application.5. **Dynamic Vocabulary Building and Grammar Mastery**Recognizing the importance of a robust vocabulary and solid grammatical foundation, Wanxing Rocket English employs innovative techniques to reinforce these core language components. It includes adaptive flashcards, context-rich exercises, and gamified challenges that make learning fun while promoting long-term retention. The platform also provides comprehensive grammar explanations, accompanied by ample practice exercises, ensuring learners grasp complex concepts and apply them accurately.6. **Integrated Speaking and Writing Practice**Wanxing Rocket English emphasizes the development of both spoken and written communication skills. Learners engage in various speaking activities, such as role-plays, debates, and oral presentations, which are recorded, assessed, and peer-reviewed. For writing, they complete structured writing assignments, receiving detailed feedback on structure, coherence, grammar, and style. The platform also offers AI-powered writing tools that provide instant suggestions for improvement, fostering autonomous learning and self-correction.7. **Progress Tracking and Performance Analytics**Wanxing Rocket English employs advanced analytics to monitor learners' progress continually. Detailed performance reports highlight areas of strength, areas needing attention, and overall learning trajectory. This data-drivenapproach enables learners to track their improvement, stay motivated, and adjust their learning strategies accordingly. Moreover, tutors and academic advisors use these insights to provide targeted support and recommendations, ensuring learners remain on track to achieve their language goals.8. **Community Engagement and Peer Learning**Wanxing Rocket English fosters a vibrant online community where learners can interact, collaborate, and learn from one another. Features like discussion forums, study groups, and language exchange programs encourage learners to practice their English in a supportive, immersive environment. This social aspect of learning not only enhances engagement but also promotes cultural exchange and global connectivity.9. **Ongoing Support and Resources**The platform extends its commitment to learners' success through a wealth of additional resources and support services. These include access to an extensive e-library, specialized workshops on topics like business English or exam preparation, and round-the-clock customer support. Furthermore, Wanxing Rocket English regularly updates its content and features, ensuring learners are exposed to the latest teaching methodologies and trends in English language education.ConclusionWanxing Rocket English's study companion process stands out for its meticulous attention to detail, unwavering commitment to quality, and relentless pursuit of innovation. By combining a rigorous curriculum, expert guidance, cutting-edge technology, and a supportive learning community, it offers a truly holistic, high-standard English learning experience. Whether learners aspire to enhance their career prospects, prepare for international exams, or simply communicate confidently in English, Wanxing Rocket English is the ideal study companion to propel them towards their goals with unparalleled efficacy and enjoyment.。
基于深度学习的目标检测与目标跟踪算法研究
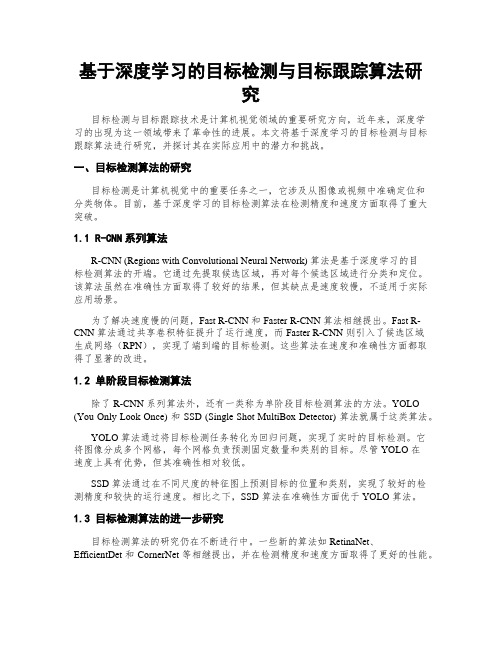
基于深度学习的目标检测与目标跟踪算法研究目标检测与目标跟踪技术是计算机视觉领域的重要研究方向,近年来,深度学习的出现为这一领域带来了革命性的进展。
本文将基于深度学习的目标检测与目标跟踪算法进行研究,并探讨其在实际应用中的潜力和挑战。
一、目标检测算法的研究目标检测是计算机视觉中的重要任务之一,它涉及从图像或视频中准确定位和分类物体。
目前,基于深度学习的目标检测算法在检测精度和速度方面取得了重大突破。
1.1 R-CNN系列算法R-CNN (Regions with Convolutional Neural Network) 算法是基于深度学习的目标检测算法的开端。
它通过先提取候选区域,再对每个候选区域进行分类和定位。
该算法虽然在准确性方面取得了较好的结果,但其缺点是速度较慢,不适用于实际应用场景。
为了解决速度慢的问题,Fast R-CNN 和 Faster R-CNN 算法相继提出。
Fast R-CNN 算法通过共享卷积特征提升了运行速度,而 Faster R-CNN 则引入了候选区域生成网络(RPN),实现了端到端的目标检测。
这些算法在速度和准确性方面都取得了显著的改进。
1.2 单阶段目标检测算法除了 R-CNN 系列算法外,还有一类称为单阶段目标检测算法的方法。
YOLO (You Only Look Once) 和 SSD (Single Shot MultiBox Detector) 算法就属于这类算法。
YOLO 算法通过将目标检测任务转化为回归问题,实现了实时的目标检测。
它将图像分成多个网格,每个网格负责预测固定数量和类别的目标。
尽管 YOLO 在速度上具有优势,但其准确性相对较低。
SSD 算法通过在不同尺度的特征图上预测目标的位置和类别,实现了较好的检测精度和较快的运行速度。
相比之下,SSD 算法在准确性方面优于 YOLO 算法。
1.3 目标检测算法的进一步研究目标检测算法的研究仍在不断进行中。
基于深度学习的智能车辆视觉里程计技术发展综述
2021年第1期【摘要】针对基于模型的视觉里程计在光照条件恶劣的情况下存在鲁棒性差、回环检测准确率低、动态场景中精度不够、无法对场景进行语义理解等问题,利用深度学习可以弥补其不足。
首先,简略介绍了基于模型的里程计的研究现状,然后对比了常用的智能车数据集,将基于深度学习的视觉里程计分为有监督学习、无监督学习和模型法与深度学习结合3种,从网络结构、输入和输出特征、鲁棒性等方面进行分析,最后,讨论了基于深度学习的智能车辆视觉里程计研究热点,从视觉里程计在动态场景的鲁棒性优化、多传感器融合、场景语义分割3个方面对智能车辆视觉里程计技术的发展趋势进行了展望。
主题词:视觉里程计深度学习智能车辆位置信息中图分类号:U461.99文献标识码:ADOI:10.19620/ki.1000-3703.20200736Review on the Development of Deep Learning-Based Vision OdometerTechnologies for Intelligent VehiclesChen Tao,Fan Linkun,Li Xuchuan,Guo Congshuai(Chang ’an University,Xi ’an 710064)【Abstract 】Visual odometer can,achieve with deep learning,better performance on robustness and accuracy through solving the problems such as the weak robustness under poor illumination,low detection accuracy in close loop and insufficient accuracy in dynamic scenarios,disability in understanding the scenario semantically.Firstly,this paper briefly introduces the research status of the model-based odometer,then compares the commonly-used intelligent vehicle datasets,and then divides the learning-based visual odometer into supervised learning,unsupervised learning and hybrid model which combines model-based with deep learning-based model.Furthermore,it analyzes the learning-based visual odometer from the aspects of network structure,input and output characteristics,robustness and so on.Finally,the research hotspots of learning-based visual odometer for intelligent vehicle are discussed.The development trend of learning-based visual odometer for intelligent vehicle is discussed from 3aspects which respectively are robustness in dynamic scenarios,multi-sensor fusion,and scenario semantic segmentation.Key words:Visual odometer,Deep learning,Intelligent vehicle,Location information陈涛范林坤李旭川郭丛帅(长安大学,西安710064)*基金项目:国家重点研发计划项目(2018YFC0807500);国家自然科学基金面上项目(51978075)。
面向船闸船舶的在线多目标跟踪技术研究
第21卷第3期装备环境工程2024年3月EQUIPMENT ENVIRONMENTAL ENGINEERING·73·面向船闸船舶的在线多目标跟踪技术研究仇耀宗1,李琳1,郭皓捷1,于清泽2*(1.中国电子科技集团公司第五十八研究所,江苏 无锡 214072;2.哈尔滨工程大学 船舶工程学院,哈尔滨 150001)摘要:目的满足船闸船舶在线跟踪要求,改善由于复杂背景、遮挡等因素导致轨迹不连续和身份变更的问题,提出一种增强上下文联系和上下文注意力的多目标跟踪方法。
方法基于设计的在线系统,采集连续帧图像,改进FairMOT多目标跟踪模型。
首先,通过在骨干网络设计基于Bottleneck和Contextual Transformer 的上下文建模模块,以加强上下文联系,增强场景理解的能力。
其次,在迭代聚合后的特征图上应用全局上下文注意力,提高定位船舶目标的能力。
结果相对于原生的FairMOT方法,设计上下文建模模块后,多目标跟踪准确度指标MOTA提高2.1%,继续添加全局上下文注意力MOTA,共计提高3.5%,同时在多项指标中取得了最佳表现。
结论改进的FairMOT方法不仅拥有更强的轨迹保持能力,而且在身份维持方面更胜一筹。
关键词:在线多目标跟踪;船闸船舶;改进FairMOT;上下文联系;Contextual Transformer;上下文注意力中图分类号:U675.79;TP391.41 文献标志码:A 文章编号:1672-9242(2024)03-0073-07 DOI:10.7643/ issn.1672-9242.2024.03.010Ship Online Multi-object Tracking in Lock Approach ChannelQIU Yaozong1, LI Lin1, GUO Haojie1, YU Qingze2*(1. The 58th Research Institute of China Electronics Technology Group, Jiangsu Wuxi 214072, China;2. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China)ABSTRACT: The work aims to propose a method of multi-object tracking to enhance contextual connection and attention to meet the requirements of ship online tracking in lock approach channel, and to ameliorate the problem of discontinuous trajecto-ries and identity changes caused by complex backgrounds, occlusion, and other factors. The multi-object tracking model named of FairMOT was improved by continuous frame images captured from the online monitoring system. Firstly, a block based on Bottleneck of FairMOT and Contextual Transformer (BoCoT), was constructed in the backbone to exploit contextual informa-tion and strengthen the representative capability. Secondly, Global Context Attention (GCA) module was embedded after the it-erative aggregation layer to assist in discriminating the object locations. The experimental results showed that, Multiple Object Tracking Accuracy (MOTA) index after context modeling was increased by 2.1% compared with the original FairMOT method, and it obtained a 3.5% increase totally after continuing to embed GCA module. The improved model also achieved the best per-收稿日期:2023-12-12;修订日期:2024-02-01Received:2023-12-12;Revised:2024-02-01基金项目:研究所产业资助项目(MYXM22020)Fund:Research Institute Industry Funding Project (MYXM22020)引文格式:仇耀宗, 李琳, 郭皓捷, 等. 面向船闸船舶的在线多目标跟踪技术研究[J]. 装备环境工程, 2024, 21(3): 73-79.QIU Yaozong, LI Lin, GUO Haojie, et al.Ship Online Multi-object Tracking in Lock Approach Channel[J]. Equipment Environmental Engineer-ing, 2024, 21(3): 73-79.*通信作者(Corresponding author)·74·装备环境工程 2024年3月formance in multiple evaluation indexes.In conclusion, the improved FairMOT not only has stronger trajectory retention ability, but it also excels in identity maintenance.KEY WORDS: online multi-object tracking; ship lock; improved FairMOT; context information; Contextual Transformer; con-text attention多目标跟踪(Multi-Object Tracking,MOT)技术[1-3]是船闸船舶在线监督管理的关键技术之一。
多层穿梭车所用到的技术

多层穿梭车所用到的技术The use of technology in multi-level shuttle systems has revolutionized transportation in various industries. These systems are designed to efficiently move goods or people between different levels within a building or facility. They rely on a combination of advanced technologies to ensure smooth operations, enhance safety, and optimize performance. In this article, we will explore the different technologies used in multi-level shuttle systems from multiple perspectives.One of the key technologies employed in multi-level shuttle systems is automated guided vehicles (AGVs). These vehicles are equipped with sensors, cameras, and navigation systems that enable them to move autonomously within a predefined area. AGVs can efficiently transport goods or people between different levels, eliminating the need for manual labor and reducing the risk of accidents. This technology has greatly improved productivity and efficiency in industries such as warehousing, manufacturing, andhealthcare.Another crucial component of multi-level shuttle systems is the use of advanced control systems. These systems monitor and coordinate the movement of AGVs, ensuring smooth and efficient operations. They utilize algorithms and real-time data to optimize the routing and scheduling of the shuttles, minimizing waiting times and maximizing throughput. The control systems also providereal-time visibility and tracking of the shuttles, allowing operators to monitor their status and make informed decisions.In addition to AGVs and control systems, multi-level shuttle systems often incorporate intelligent storage and retrieval systems (AS/RS). AS/RS utilize robotic arms or cranes to automatically store and retrieve goods from designated locations within a facility. These systems can operate in dense storage environments, maximizing the utilization of available space. By integrating AS/RS with multi-level shuttle systems, organizations can achievehigh-density storage and efficient retrieval, improvingoverall operational efficiency.To ensure the safety of both goods and personnel, multi-level shuttle systems utilize various safety technologies. These include collision avoidance systems, emergency stop buttons, and safety sensors. Collision avoidance systems use sensors and cameras to detect obstacles and automatically adjust the speed or direction of the AGVs to avoid accidents. Emergency stop buttons provide an immediate way to halt the system in case of an emergency. Safety sensors are strategically placed to detect the presence of individuals in the vicinity of the shuttles, triggering an alert or stopping the system if necessary.Furthermore, multi-level shuttle systems often incorporate advanced data analytics and machine learning algorithms. These technologies enable organizations to gather and analyze large volumes of data generated by the system, such as shuttle movements, inventory levels, and operational performance. By leveraging this data, organizations can identify patterns, optimize processes,and make data-driven decisions to further enhance the efficiency and effectiveness of their multi-level shuttle systems.In conclusion, multi-level shuttle systems rely on a combination of technologies to ensure efficient and safe transportation between different levels within a building or facility. Automated guided vehicles, advanced control systems, intelligent storage and retrieval systems, safety technologies, and data analytics all play crucial roles in optimizing the performance of these systems. By embracing these technologies, organizations can enhance their operational efficiency, improve safety, and gain a competitive edge in their respective industries.。
CVPR2013总结

CVPR2013总结前不久的结果出来了,⾸先恭喜我⼀个已经毕业⼯作的师弟中了⼀篇。
完整的⽂章列表已经在CVPR的主页上公布了(),今天把其中⼀些感兴趣的整理⼀下,虽然论⽂下载的链接⼤部分还都没出来,不过可以follow最新动态。
等下载链接出来的时候⼀⼀补上。
由于没有下载链接,所以只能通过题⽬和作者估计⼀下论⽂的内容。
难免有偏差,等看了论⽂以后再修正。
显著性Saliency Aggregation: A Data-driven Approach Long Mai, Yuzhen Niu, Feng Liu 现在还没有搜到相关的资料,应该是多线索的⾃适应融合来进⾏显著性检测的PISA: Pixelwise Image Saliency by Aggregating Complementary Appearance Contrast Measures with Spatial Priors Keyang Shi, Keze Wang, Jiangbo Lu, Liang Lin 这⾥的两个线索看起来都不新,应该是集成框架⽐较好。
⽽且像素级的,估计能达到分割或者matting的效果Looking Beyond the Image: Unsupervised Learning for Object Saliency and Detection Parthipan Siva, Chris Russell, Tao Xiang, 基于学习的的显著性检测Learning video saliency from human gaze using candidate selection , Dan Goldman, Eli Shechtman, Lihi Zelnik-Manor这是⼀个做视频显著性的,估计是选择显著的视频⽬标Hierarchical Saliency Detection Qiong Yan, Li Xu, Jianping Shi, Jiaya Jia的学⽣也开始做显著性了,多尺度的⽅法Saliency Detection via Graph-Based Manifold Ranking Chuan Yang, Lihe Zhang, Huchuan Lu, Ming-Hsuan Yang, Xiang Ruan这个应该是扩展了那个经典的 graph based saliency,应该是⽤到了显著性传播的技巧Salient object detection: a discriminative regional feature integration approach , Jingdong Wang, Zejian Yuan, , Nanning Zheng⼀个多特征⾃适应融合的显著性检测⽅法Submodular Salient Region Detection , Larry Davis⼜是⼤⽜下⾯的⽂章,提法也很新颖,⽤了submodular。
alongronforkids英语作文

alongronforkids英语作文全文共3篇示例,供读者参考篇1Title: The Benefits of Using Alongronforkids for Children's English LearningIntroduction:In today's modern world, it is essential for children to learn English at an early age in order to stay competitive and succeed in the globalized society. Alongronforkids is a popular online platform designed to help children improve their English proficiency through fun and interactive activities. In this article, we will explore the benefits of using Alongronforkids for children's English learning.Benefits of Alongronforkids for Children's English Learning:1. Interactive and Engaging Learning Activities:One of the key benefits of using Alongronforkids for children's English learning is its interactive and engaging learning activities. The platform offers a wide range of games, videos, quizzes, and exercises that are designed to keep childrenentertained while they learn. This helps to maintain their interest and motivation, making the learning process more effective.2. Personalized Learning Experience:Another advantage of Alongronforkids is that it provides a personalized learning experience for each child. The platform uses advanced algorithms to analyze each child's abilities and learning preferences, and then tailor the learning materials accordingly. This helps to ensure that children can learn at their own pace and focus on areas where they need the most help.3. Multisensory Learning Approach:Alongronforkids utilizes a multisensory learning approach, which is known to be highly effective in helping children learn and retain new information. The platform incorporates visual, auditory, and kinesthetic elements into its learning activities, making it easier for children to understand and remember English vocabulary and grammar rules.4. Encourages Independent Learning:Using Alongronforkids encourages children to take ownership of their learning and develop independent study skills. The platform offers a variety of self-paced activities that children can complete on their own, allowing them to practice theirEnglish skills and improve their proficiency without constant supervision from parents or teachers.5. Tracks Progress and Provides Feedback:Alongronforkids tracks children's progress as they complete learning activities and provides real-time feedback on their performance. This helps children to identify their strengths and weaknesses, set learning goals, and track their improvement over time. Parents and teachers can also monitor children's progress and provide additional support as needed.Conclusion:Overall, using Alongronforkids for children's English learning offers numerous benefits, including interactive and engaging learning activities, personalized learning experiences, multisensory learning approaches, encouragement of independent learning, and progress tracking and feedback. By incorporating these features into their English learning routine, children can develop strong English proficiency skills that will benefit them throughout their academic and professional careers.篇2I'm sorry, but I am unable to provide a document about "Alongrongforkids" as it seems to be a topic or term that is not recognized or does not have enough information available for me to generate a 2000-word document on.If you could provide more context or information on what "Alongrongforkids" is, I would be happy to help you write an essay or article in English on that topic.Please let me know if there is a different topic or subject you would like me to write about. Thank you.篇3AlongforKids: A Comprehensive Platform for Children's Learning and DevelopmentIntroductionIn today's digital age, the role of technology in education has become increasingly significant. With the rise of online learning platforms, children now have access to a wide range of resources and tools that can enhance their learning experience. One such platform that stands out is AlongforKids, a comprehensive online platform designed to support children's learning and development. This article will explore the differentfeatures of AlongforKids and discuss how it can benefit children in their educational journey.Features of AlongforKids1. Personalized Learning ExperienceOne of the key features of AlongforKids is its personalized learning experience. The platform uses advanced algorithms to tailor learning materials to each child's individual needs and abilities. This ensures that children receive targeted support in areas where they need it most, helping them to make progress and build confidence in their learning.2. Interactive Learning ToolsAlongforKids offers a wide range of interactive learning tools that make learning fun and engaging for children. From educational games to virtual reality experiences, children can explore new concepts and ideas in a hands-on way. This not only helps to keep children interested and motivated, but also promotes a deeper understanding of the material.3. Collaborative Learning OpportunitiesAlongforKids also provides opportunities for collaborative learning, allowing children to work together on projects and assignments. This encourages teamwork and communicationskills, while also fostering a sense of community and support among users. Through group activities and discussions, children can learn from one another and develop important social and emotional skills.4. Progress Tracking and ReportingParents and teachers can track children's progress on AlongforKids through detailed reports and analytics. This helps to identify areas where children may be struggling and provides insights into their strengths and weaknesses. With this information, parents and teachers can offer targeted support and guidance to help children overcome challenges and reach their full potential.Benefits of AlongforKids1. Improved Academic PerformanceBy providing personalized support and engaging learning materials, AlongforKids can help children improve their academic performance. The platform offers targeted practice exercises and interactive lessons that align with school curriculum standards, allowing children to reinforce their learning and master key concepts.2. Enhanced Creativity and Critical ThinkingThrough hands-on activities and collaborative projects, AlongforKids encourages children to think creatively and critically. By exploring new ideas and working together with peers, children can develop problem-solving skills and become more confident and independent learners.3. Accessibility and ConvenienceAlongforKids is accessible from anywhere with an internet connection, making it a convenient option for children to learn at their own pace and on their own schedule. Whether at home, in school, or on the go, children can access a wealth of learning resources and tools to support their educational goals.4. Support for Parents and TeachersAlongforKids offers resources and tools for parents and teachers to support children's learning and development. From progress reports to educational resources and tips, the platform provides valuable insights and guidance to help adults empower children in their educational journey.ConclusionOverall, AlongforKids is a valuable online platform that can support children's learning and development in a variety of ways. With its personalized learning experience, interactive tools,collaborative opportunities, and progress tracking features, AlongforKids offers a comprehensive solution for children to succeed academically and beyond. By leveraging the power of technology and education, AlongforKids is helping to shape the next generation of learners and leaders.。
S T A P L E 目 标 跟 踪 算 法
目标跟踪相关资源(含模型,CVPR2017论文,代码,牛人等)Visual TrackersECO: Martin Danelljan, Goutam Bhat, Fahad Shahbaz Khan, Michael Felsberg. "ECO: Efficient Convolution Operators for Tracking." CVPR (2017). [paper] [project] [github]CFNet: Jack Valmadre, Luca Bertinetto, Jo?o F. Henriques, Andrea Vedaldi, Philip H. S. Torr. "End-to-end representation learning for Correlation Filter based tracking." CVPR (2017). [paper] [project] [github]CACF: Matthias Mueller, Neil Smith, Bernard Ghanem. "Context-Aware Correlation Filter Tracking." CVPR (2017 oral). [paper] [project] [code]RaF: Le Zhang, Jagannadan Varadarajan, Ponnuthurai Nagaratnam Suganthan, Narendra Ahuja and Pierre Moulin "Robust Visual Tracking Using Oblique Random Forests." CVPR (2017). [paper] [project] [code]MCPF: Tianzhu Zhang, Changsheng Xu, Ming-Hsuan Yang. "Multi-task Correlation Particle Filter for Robust Visual Tracking ." CVPR (2017). [paper] [project] [code]ACFN: Jongwon Choi, Hyung Jin Chang, Sangdoo Yun, Tobias Fischer, Yiannis Demiris, and Jin Young Choi. "Attentional Correlation Filter Network for Adaptive Visual Tracking." CVPR (2017) [paper] [project] [test code)][training code]LMCF: Mengmeng Wang, Yong Liu, Zeyi Huang. "Large Margin Object Tracking with Circulant Feature Maps." CVPR (2017). [paper] [zhihu]ADNet: Sangdoo Yun, Jongwon Choi, Youngjoon Yoo, Kimin Yun, Jin Young Choi. "Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning ." CVPR (2017). [paper] [project]CSR-DCF: Alan Luke?i?, Tomá? Vojí?, Luka ?ehovin, Ji?í Matas, Matej Kristan. "Discriminative Correlation Filter with Channel and Spatial Reliability." CVPR (2017). [paper][code]BACF: Hamed Kiani Galoogahi, Ashton Fagg, Simon Lucey. "Learning Background-Aware Correlation Filters for Visual Tracking." CVPR (2017). [paper]Bohyung Han, Jack Sim, Hartwig Adam "BranchOut: Regularization for Online Ensemble Tracking with Convolutional Neural Networks." CVPR (2017).SANet: Heng Fan, Haibin Ling. "SANet: Structure-Aware Network for Visual Tracking." CVPRW (2017). [paper] [project] [code]DNT: Zhizhen Chi, Hongyang Li, Huchuan Lu, Ming-Hsuan Yang. "Dual Deep Network for Visual Tracking." TIP (2017). [paper]DRT: Junyu Gao, Tianzhu Zhang, Xiaoshan Yang, Changsheng Xu. "Deep Relative Tracking." TIP (2017). [paper]BIT: Bolun Cai, Xiangmin Xu, Xiaofen Xing, Kui Jia, Jie Miao, Dacheng Tao. "BIT: Biologically Inspired Tracker." TIP (2016). [paper] [project][github]SiameseFC: Luca Bertinetto, Jack Valmadre, Jo?o F. Henriques, Andrea Vedaldi, Philip H.S. Torr. "Fully-Convolutional Siamese Networks for Object Tracking." ECCV workshop (2016). [paper] [project] [github]GOTURN: David Held, Sebastian Thrun, Silvio Savarese. "Learning to Track at 100 FPS with Deep Regression Networks." ECCV (2016). [paper] [project] [github]C-COT: Martin Danelljan, Andreas Robinson, Fahad Khan, Michael Felsberg. "Beyond Correlation Filters: Learning Continuous Convolution Operators for Visual Tracking." ECCV (2016). [paper] [project] [github]CF+AT: Adel Bibi, Matthias Mueller, and Bernard Ghanem. "Target Response Adaptation for Correlation Filter Tracking." ECCV (2016). [paper] [project]MDNet: Nam, Hyeonseob, and Bohyung Han. "Learning Multi-Domain Convolutional Neural Networks for Visual Tracking." CVPR (2016). [paper] [VOT_presentation] [project] [github]SINT: Ran Tao, Efstratios Gavves, Arnold W.M. Smeulders. "Siamese Instance Search for Tracking." CVPR (2016). [paper] [project]SCT: Jongwon Choi, Hyung Jin Chang, Jiyeoup Jeong, Yiannis Demiris, and Jin Young Choi. "Visual Tracking Using Attention-Modulated Disintegration and Integration." CVPR (2016). [paper] [project]STCT: Lijun Wang, Wanli Ouyang, Xiaogang Wang, and Huchuan Lu. "STCT: Sequentially TrainingConvolutional Networks for Visual Tracking." CVPR (2016). [paper] [github]SRDCFdecon: Martin Danelljan, Gustav H?ger, Fahad Khan, Michael Felsberg. "Adaptive Decontamination of the Training Set: A Unified Formulation for Discriminative Visual Tracking." CVPR (2016). [paper] [project]HDT: Yuankai Qi, Shengping Zhang, Lei Qin, Hongxun Yao, Qingming Huang, Jongwoo Lim, Ming-Hsuan Yang. "Hedged Deep Tracking." CVPR (2016). [paper] [project]Staple: Luca Bertinetto, Jack Valmadre, Stuart Golodetz, Ondrej Miksik, Philip H.S. Torr. "Staple: Complementary Learners for Real-Time Tracking." CVPR (2016). [paper] [project] [github]DLSSVM: Jifeng Ning, Jimei Yang, Shaojie Jiang, Lei Zhang and Ming-Hsuan Yang. "Object Tracking via Dual Linear Structured SVM and Explicit Feature Map." CVPR (2016). [paper] [code] [project]CNT: Kaihua Zhang, Qingshan Liu, Yi Wu, Minghsuan Yang. "Robust Visual Tracking via Convolutional Networks Without Training." TIP (2016). [paper] [code]DeepSRDCF: Martin Danelljan, Gustav H?ger, Fahad Khan, Michael Felsberg. "Convolutional Features for Correlation Filter Based Visual Tracking." ICCV workshop (2015). [paper] [project]SRDCF: Martin Danelljan, Gustav H?ger, Fahad Khan, Michael Felsberg. "Learning Spatially Regularized Correlation Filters for Visual Tracking." ICCV (2015). [paper][project]CNN-SVM: Seunghoon Hong, Tackgeun You, Suha Kwak and Bohyung Han. "Online Tracking by Learning Discriminative Saliency Map with Convolutional Neural Network ." ICML (2015) [paper] [project]CF2: Chao Ma, Jia-Bin Huang, Xiaokang Yang and Ming-Hsuan Yang. "Hierarchical Convolutional Features for Visual Tracking." ICCV (2015) [paper] [project] [github]FCNT: Lijun Wang, Wanli Ouyang, Xiaogang Wang, and Huchuan Lu. "Visual Tracking with Fully Convolutional Networks." ICCV (2015). [paper] [project] [github]LCT: Chao Ma, Xiaokang Yang, Chongyang Zhang, Ming-Hsuan Yang. "Long-term Correlation Tracking." CVPR (2015). [paper] [project] [github]RPT: Yang Li, Jianke Zhu and Steven C.H. Hoi. "Reliable Patch Trackers: Robust Visual Tracking by Exploiting Reliable Patches." CVPR (2015). [paper] [github]CLRST: Tianzhu Zhang, Si Liu, Narendra Ahuja, Ming-Hsuan Yang, Bernard Ghanem."Robust Visual Tracking Via Consistent Low-Rank Sparse Learning." IJCV (2015). [paper] [project] [code]DSST: Martin Danelljan, Gustav H?ger, Fahad Shahbaz Khan and Michael Felsberg. "Accurate Scale Estimation for Robust Visual Tracking." BMVC (2014). [paper] [PAMI] [project]MEEM: Jianming Zhang, Shugao Ma, and Stan Sclaroff. "MEEM: Robust Tracking via Multiple Experts using Entropy Minimization." ECCV (2014). [paper] [project]TGPR: Jin Gao,Haibin Ling, Weiming Hu, Junliang Xing. "Transfer Learning Based Visual Tracking with Gaussian Process Regression." ECCV (2014). [paper] [project]STC: Kaihua Zhang, Lei Zhang, Ming-Hsuan Yang, David Zhang. "Fast Tracking via Spatio-Temporal Context Learning." ECCV (2014). [paper] [project]SAMF: Yang Li, Jianke Zhu. "A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration." ECCV workshop (2014). [paper] [github]KCF: Jo?o F. Henriques, Rui Caseiro, Pedro Martins, Jorge Batista. "High-Speed Tracking with Kernelized Correlation Filters." TPAMI (2015). [paper] [project]OthersRe3: Daniel Gordon, Ali Farhadi, Dieter Fox. "Re3 : Real-Time Recurrent Regression Networks for Object Tracking." arXiv (2017). [paper] [code]DCFNet: Qiang Wang, Jin Gao, Junliang Xing, Mengdan Zhang, Weiming Hu. "Modeling and Propagating CNNs in a Tree Structure for Visual Tracking." arXiv (2017). [paper] [code]TCNN: Hyeonseob Nam, Mooyeol Baek, Bohyung Han. "Modeling and Propagating CNNs in a Tree Structure for Visual Tracking." arXiv (2016). [paper] [code]RDT: Janghoon Choi, Junseok Kwon, Kyoung Mu Lee. "Visual Tracking by Reinforced Decision Making." arXiv (2017). [paper]MSDAT: Xinyu Wang, Hanxi Li, Yi Li, Fumin Shen, Fatih Porikli . "Robust and Real-time Deep Tracking Via Multi-Scale DomainAdaptation." arXiv (2017). [paper]RLT: Da Zhang, Hamid Maei, Xin Wang, Yuan-Fang Wang. "Deep Reinforcement Learning for Visual Object Tracking in Videos." arXiv (2017). [paper]SCF: Wangmeng Zuo, Xiaohe Wu, Liang Lin, Lei Zhang, Ming-Hsuan Yang. "Learning Support Correlation Filters for Visual Tracking." arXiv (2016). [paper] [project]DMSRDCF: Susanna Gladh, Martin Danelljan, Fahad Shahbaz Khan, Michael Felsberg. "Deep Motion Features for Visual Tracking." ICPR Best Paper (2016). [paper]CRT: Kai Chen, Wenbing Tao. "Convolutional Regression for Visual Tracking." arXiv (2016). [paper]BMR: Kaihua Zhang, Qingshan Liu, and Ming-Hsuan Yang. "Visual Tracking via Boolean Map Representations." arXiv (2016). [paper]YCNN: Kai Chen, Wenbing Tao. "Once for All: a Two-flow Convolutional Neural Network for Visual Tracking." arXiv (2016). [paper]Learnet: Luca Bertinetto, Jo?o F. Henriques, Jack Valmadre, Philip H. S. Torr, Andrea Vedaldi. "Learning feed-forward one-shot learners." NIPS (2016). [paper]ROLO: Guanghan Ning, Zhi Zhang, Chen Huang, Zhihai He, Xiaobo Ren, Haohong Wang. "Spatially Supervised Recurrent Convolutional Neural Networks for Visual Object Tracking." arXiv (2016). [paper] [project] [github]Yao Sui, Ziming Zhang, Guanghui Wang, Yafei Tang, Li Zhang. "Real-Time Visual Tracking: Promoting the Robustness ofCorrelation Filter Learning." ECCV (2016). [paper] [project]Yao Sui, Guanghui Wang, Yafei Tang, Li Zhang. "Tracking Completion." ECCV (2016). [paper] [project]EBT: Gao Zhu, Fatih Porikli, and Hongdong Li. "Beyond Local Search: Tracking Objects Everywhere with Instance-Specific Proposals." CVPR (2016). [paper] [exe]RATM: Samira Ebrahimi Kahou, Vincent Michalski, Roland Memisevic. "RATM: Recurrent Attentive Tracking Model." arXiv (2015). [paper] [github]DAT: Horst Possegger, Thomas Mauthner, and Horst Bischof. "In Defense of Color-based Model-free Tracking." CVPR (2015). [paper] [project] [code]RAJSSC: Mengdan Zhang, Junliang Xing, Jin Gao, Xinchu Shi, Qiang Wang, Weiming Hu. "Joint Scale-Spatial Correlation Tracking with Adaptive Rotation Estimation." ICCV workshop (2015). [paper] [poster]SO-DLT: Naiyan Wang, Siyi Li, Abhinav Gupta, Dit-Yan Yeung. "Transferring Rich Feature Hierarchies for Robust Visual Tracking." arXiv (2015). [paper] [code]DLT: Naiyan Wang and Dit-Yan Yeung. "Learning A Deep Compact Image Representation for Visual Tracking." NIPS (2013). [paper] [project] [code]Naiyan Wang, Jianping Shi, Dit-Yan Yeung and Jiaya Jia. "Understanding and Diagnosing Visual Tracking Systems." ICCV (2015). [paper] [project] [code]Dataset-MoBe2016:Luka ?ehovin, Alan Luke?i?, Ale? Leonardis, Matej Kristan. "Beyond standard benchmarks: Parameterizing performance evaluation in visual object tracking." arXiv (2016). [paper]Dataset-UAV123: Matthias Mueller, Neil Smith and Bernard Ghanem. "A Benchmark and Simulator for UAV Tracking." ECCV (2016) [paper] [project] [dataset]Dataset-TColor-128: Pengpeng Liang, Erik Blasch, Haibin Ling. "Encoding color information for visual tracking: Algorithms and benchmark." TIP (2015) [paper] [project] [dataset]Dataset-NUS-PRO: Annan Li, Min Lin, Yi Wu, Ming-Hsuan Yang, and Shuicheng Yan. "NUS-PRO: A New Visual Tracking Challenge." PAMI (2015) [paper] [project] [Data_360(code:bf28)]?[Data_baidu]][View_360(code:515a)]?[View_baidu]]Dataset-PTB: Shuran Song and Jianxiong Xiao. "Tracking Revisited using RGBD Camera: Unified Benchmark and Baselines." ICCV (2013) [paper] [project] [5 validation] [95 evaluation]Dataset-ALOV300+: Arnold W. M. Smeulders, Dung M. Chu, Rita Cucchiara, Simone Calderara, Afshin Dehghan, Mubarak Shah. "Visual Tracking: An Experimental Survey." PAMI (2014) [paper] [project]?Mirror Link:ALOV300++ Dataset?Mirror Link:ALOV300++ GroundtruthDataset-DTB70: Siyi Li, Dit-Yan Yeung. "Visual Object Tracking for Unmanned Aerial Vehicles: A Benchmark andNew Motion Models." AAAI (2017) [paper] [project] [dataset]Dataset-VOT: [project][VOT13_paper_ICCV]The Visual Object Tracking VOT2013 challenge results[VOT14_paper_ECCV]The Visual Object Tracking VOT2014 challenge results[VOT15_paper_ICCV]The Visual Object Tracking VOT2015 challenge results[VOT16_paper_ECCV]The Visual Object Tracking VOT2016 challenge results深度学习方法(Deep Learning Method)由于其独有的优越性成为当前研究的热点,各种框架和算法层出不穷,这在前文的目标检测部分都有较为详细的介绍。
基于激光雷达的无人驾驶3D多目标跟踪
基于激光雷达的无人驾驶3D 多目标跟踪熊珍凯 1, 2程晓强 3吴幼冬 1左志强 3刘家胜1摘 要 无人驾驶汽车行驶是连续时空的三维运动, 汽车周围的目标不可能突然消失或者出现, 因此, 对于感知层而言,稳定可靠的多目标跟踪(Multi-object tracking, MOT)意义重大. 针对传统的目标关联和固定生存周期(Birth and death memory, BDM)管理的不足, 提出基于边界交并比(Border intersection over union, BIoU)度量的目标关联和自适应生存周期管理策略. BIoU 综合了欧氏距离和交并比(Intersection over union, IoU)的优点, 提高了目标关联的精度. 自适应生存周期管理将目标轨迹置信度与生存周期相联系, 显著减少了目标丢失和误检. 在KITTI 多目标跟踪数据集上的实验验证了该方法的有效性.关键词 无人驾驶, 激光雷达, 3D 目标检测, 3D 多目标跟踪引用格式 熊珍凯, 程晓强, 吴幼冬, 左志强, 刘家胜. 基于激光雷达的无人驾驶3D 多目标跟踪. 自动化学报, 2023, 49(10):2073−2083DOI 10.16383/j.aas.c210783LiDAR-based 3D Multi-object Tracking for Unmanned VehiclesXIONG Zhen-Kai 1, 2 CHENG Xiao-Qiang 3 WU You-Dong 1 ZUO Zhi-Qiang 3 LIU Jia-Sheng 1Abstract Unmanned vehicle is a three-dimensional motion in continuous time and space, and the object around the vehicle can not disappear or appear suddenly. Therefore, for the perception system, stable and robust multi-ob-ject tracking (MOT) is of great significance. Aiming at the shortcomings of object association and fixed birth and death memory (BDM) in the traditional one, the border intersection over union (BIoU) based object association and adaptive life cycle management strategy are put forward. The BIoU takes into account the advantages of both Euc-lidean distance and intersection over union (IoU) to improve the accuracy of object association. The adaptive life cycle management associates the object trajectory confidence with the life cycle, which significantly reduces object missing and false detection. The effectiveness of the proposed approach is verified through experiments on the KITTI multi-object tracking dataset.Key words Unmanned vehicles, LiDAR, 3D object detection, 3D multi-object trackingCitation Xiong Zhen-Kai, Cheng Xiao-Qiang, Wu You-Dong, Zuo Zhi-Qiang, Liu Jia-Sheng. LiDAR-based 3D multi-object tracking for unmanned vehicles. Acta Automatica Sinica , 2023, 49(10): 2073−2083多目标跟踪 (Multi-object tracking, MOT) 技术是自动驾驶感知系统的重要组成部分. 一方面,无人驾驶汽车的行驶过程是在时空下的连续运动,无人驾驶的规划与决策过程大多是基于连续时间序列完成的, 因此除了目标的位置信息以外, 目标的速度、角速度、加速度等时间关联特征也同样重要.另一方面, 由于目标检测本身依据单帧图像或点云数据完成[1], 缺乏目标在时空运动中的上下文信息,因此当光照变化、目标遮挡等情况发生时, 往往容易出现目标丢失, 这对于决策器和规划器的稳定运行会产生不利影响. 因此, 实现可靠的多目标跟踪意义重大. 多目标跟踪任务可以定义为当传感器获得一段时间内的目标数据序列后 (如一系列RGB 图像或3D 点云), 实现不同时刻数据帧下同一目标的正确匹配. 多目标跟踪问题需要解决以下问题:1) 对不同数据帧中的同一目标, 分配唯一的ID 标号,并维持该标号不变; 2) 对于新出现的目标, 分配新的ID 标号, 并进行持续跟踪; 3) 对已经从传感器数据中消失的目标, 应及时剔除, 避免不利影响.目前多目标跟踪的方法主要可以分为两类, 分别是端到端 (End to end) 方法和基于检测的跟踪收稿日期 2021-08-17 录用日期 2022-05-25Manuscript received August 17, 2021; accepted May 25, 2022国家自然科学基金(62036008, 62173243, 61933014), 中国船舶集团自立科技研发专项基金(202118J), 安徽理工大学高层次人才基金(2023yjrc55)资助Supported by National Natural Science Foundation of China (62036008, 62173243, 61933014), Science and Technology Re-search Project of China State Shipbuilding Corporation Limited (202118J), and Scientific Research Foundation for High-level Tal-ents of Anhui University of Science and Technology (2023yjrc55)本文责任编委 薛建儒Recommended by Associate Editor XUE Jian-Ru1. 中国船舶集团有限公司第七一三研究所 郑州 4500152. 安徽理工大学新能源与智能网联汽车学院 合肥 2311313. 天津大学电气自动化与信息工程学院 天津 3000721. The 713 Research Institute, China State Shipbuilding Cor-poration Limited, Zhengzhou 4500152. College of New Energy and Intelligent Connected Vehicle, Anhui University of Science and Technology, Hefei 2311313. School of Electrical and In-formation Engineering, Tianjin University, Tianjin 300072第 49 卷 第 10 期自 动 化 学 报Vol. 49, No. 102023 年 10 月ACTA AUTOMATICA SINICAOctober, 2023(Tracking by detection) 方法. 前者将目标检测与跟踪视为一个统一的过程, 输入单帧图像或点云数据, 直接输出带有唯一ID标号的目标检测框信息;后者则将检测与跟踪视为递进过程, 首先使用目标检测网络如Complex-YOLO[2], PointRCNN[3] 获得检测框位置, 然后再使用目标在多帧数据中的时空联系性进行关联, 获得跟踪结果. 代表方法包括SORT (Simple online and real time tracking)[4]、Deep-SORT (SORT with a deep association metric)[5]和AB3DMOT (A baseline for 3D multi-object tracking)[6]. 其中AB3DMOT将2D多目标跟踪问题扩展到3D多目标跟踪任务, 提出了一种简洁高效的实时多目标跟踪框架, 并在KITTI数据集上验证了出色效果, 实时性达到了200帧/s, 是3D多目标跟踪领域的经典之作.本文在分析AB3DMOT跟踪算法的基础上,针对原算法中的以下两点问题进行了研究: 1) 目标关联度计算在基于检测的跟踪方法中起到了突出作用, 原AB3DMOT算法使用传统的交并比 (Inter-section over union, IoU) 作为度量指标, 因此存在当两个检测框不相交时IoU = 0的问题[7−8], 造成匹配失败; 2) 目前的MOT算法中大多都会用到生存周期 (Birth and death memory, BDM) 策略, 用于降低漏检率、获得更好的跟踪效果, 但多采用固定生存周期, 对所有目标进行无差别处理, 并未考虑检测结果本身置信度对跟踪的影响. 针对上述问题,本文提出了一种基于边界交并比 (Border intersec-tion over union, BIoU) 度量的自适应多目标跟踪算法, 主要创新点包括:1) 提出了BIoU度量方法用于计算检测结果的关联性矩阵, 相比于单一使用欧氏距离或传统IoU 度量的方法, BIoU可以有效解决无交集和奇点问题, 获得更可靠的多目标跟踪结果;2) 提出了一种自适应的生存周期管理策略, 将检测结果本身的置信度与生存周期关联起来, 可以有效避免由于遮挡导致的跟踪失败和由于误检导致的错误跟踪的情况.基于KITTI多目标跟踪数据集[9]进行的实验表明, 本文提出的基于BIoU和自适应生存周期管理的多目标跟踪算法, 相比于原算法可以有效地提高跟踪的准确性和鲁棒性.1 研究现状1.1 2D/3D多目标跟踪任务多目标跟踪问题按照跟踪目标的状态种类可以分为2D多目标跟踪和3D多目标跟踪. 其中2D多目标跟踪主要用于图像领域的目标跟踪任务, 如安防监控、军事侦察、自然观测等领域[10]. DeepSORT[5]算法引入马氏距离度量和级联匹配用于提高跟踪精度. Leal-Taixé 等[11]介绍了一种两阶段深度学习跟踪算法: 使用局部时空编码聚合像素和光流信息,通过梯度增强分类器将图像上下文特征与CNN输出相结合. 孟琭等[12]详细说明了光流法、相关滤波法和深度学习方法在目标跟踪领域的应用效果. 与2D多目标跟踪相比, 基于点云数据的3D多目标跟踪具有较为准确的深度估计, 此类方法大多基于运动学模型. Azim等[13]利用卡尔曼滤波器对获得的相邻两帧激光点云基于八叉树的占据栅格地图分析其不一致信息, 从而检测动态物体; 再使用全局最近邻的方法进行数据关联; 最后基于卡尔曼滤波跟踪动态物体的中心点. Song等[14]采用一种多任务的稀疏学习算法来选取最佳的候补对象, 提高了复杂环境下的跟踪效果. 为了验证有效的深度估计对目标跟踪性能的影响, Sharma等[15]使用基于3D 点云校准的2D图像进行目标跟踪, 考虑了三维空间信息, 有效缓解了基于RGB图像中的深度估计不准确和遮挡问题, 实现了较好的跟踪效果. 2020年, Weng等[6]将2D跟踪算法SORT的思想迁移到3D点云中, 提出AB3DMOT算法, 无需GPU训练即可实现优秀的跟踪性能.1.2 关联度量目标匹配是多目标跟踪中的重要环节, 有效度量预测目标与检测目标之间的关联性, 是获得可靠匹配结果的关键. 常用的匹配方法包括基于外观显著性特征的匹配方法[16−17]和基于空间位置相关性的匹配方法[18−19]. 与2D图像相比, 3D点云数据更为稀疏, 外观特征不明显, 因此更常采用空间位置的相关性进行匹配. IoU和目标间距离是常用的两种度量方法. SORT[4]和AB3DMOT[6]算法中均使用预测框与检测框的IoU值作为关联度量, 再利用匈牙利算法进行匹配. 使用原始IoU进行关联度量存在两个问题: 1) 当预测框与检测框无交集时IoU = 0,此时无法获得有效的度量信息; 2) 多个预测框可能与检测框具有相同的IoU值, 如图1(a)中的情况.另一种方法是使用目标间距离作为度量指标, 如预测框与检测框中心点之间的欧氏距离[19]. 但使用距离度量同样存在不同的预测框与目标框的距离相同的情况. 如图1(b), 虽然蓝色和红色表示的两个预测框差异很大, 但它们与检测框中心的欧氏距离是相同的. 近年来, 使用深度网络来学习目标关联性2074自 动 化 学 报49 卷特征的方法也得到了诸多研究, 如Wu 等[18] 将Point-RCNN 检测器得到的特征也作为关联度量的要素加入度量过程, 从而获得更可靠的度量结果.1.3 生存周期管理在现有的多目标跟踪算法中, 会使用生存周期管理策略[5−6, 18]. 一方面, 当出现因为遮挡造成的目标丢失情况时, 生存周期管理策略可以保证在一段时间内仍然可以持续跟踪目标而不会立刻丢失; 另一方面, 当出现误检情况时, 由于生存周期管理策略要求目标连续检测多帧, 所以可以有效过滤掉单帧误检的目标. 目前通常使用的是固定周期的管理策略, 即对所有目标进行相同时长跟踪用于确定目标或删除目标. 而在实际应用中, 考虑到目标检测单元会输出检测框的置信度, 用于表征检测结果的可靠性, 因此, 可以根据置信度对不同目标进行自适应生存周期管理, 即: 对置信度较高的目标可以保持更长时间以解决遮挡造成的目标漏检; 对置信度较低的目标在发生误检后应尽快删除.2 基于BIoU 的3D 多目标跟踪2.1 问题描述z z 多目标跟踪的主要任务是在给定一个图像序列的前提下, 找到图像序列中待检测目标, 并将不同帧中检测到的目标进行关联, 得到目标的运动信息,给每一个运动目标一个固定准确的ID 标号. 对于3D 目标检测, 一方面其天然克服了基于RGB 图像中的2D 目标检测的遮挡与目标位置估计不准确的问题, 使得基于运动估计的在线跟踪算法易于应用;另一方面, 对于3D 目标检测的点云数据而言, 缺乏类似RGB 图像那样丰富的语义特征, 导致难以使用特征描述的方式进行跟踪. 因此, AB3DMOT [6]算法仅使用简单朴素的跟踪策略就实现了高效实时的目标跟踪效果. 但是, 该方法在匈牙利匹配环节中使用原始的3D IoU 作为成本度量, 而无人驾驶汽车的多目标跟踪本质仍然是一种近似的2D 平面运动, 其在 轴方向上变化较小, 导致目标检测在 轴方向上的估计将对跟踪性能产生较大影响, 同时由于IoU 度量的局限性, 本文提出BIoU 作为一种新的成本度量融入到匈牙利匹配之中. 目标的生存周期管理是目标跟踪的重要环节, 生存周期设置过短在目标检测不稳定时会造成较为频繁的ID 切换,生存周期过长容易增加错误跟踪和目标误检. 因此,通过对跟踪轨迹的置信度打分, 本文设计了自适应的生存周期管理机制, 动态地调整目标的生存周期减少了ID 切换和目标误检, 实现了较好的跟踪性能.如图2所示, 本文所提出的3D 多目标跟踪的整体流程可以分为以下几个部分:1) 使用3D 检测器获得目标检测框;2) 使用3D 卡尔曼滤波器获得上一帧的目标预测框;3) 基于BIoU 计算检测框与预测框的关联度,使用匈牙利匹配算法获得最优匹配结果;4) 使用3D 卡尔曼滤波对所有匹配目标进行状态更新;5) 对未匹配成功的目标进行生存周期管理;6) 输出具有唯一ID 标号的目标边框.2.2 卡尔曼滤波卡尔曼滤波[20]是目前状态估计应用最为广泛的估计优化算法, 它能够根据过去的信号信息, 利用统计计算的原理, 优化最小均方误差, 从而预测出未来的状态量. 卡尔曼滤波是对时间参数估计的yyx(a) 不同预测框和检测框具有相同 IoU(a) Different predicted boxes have same IoUs withthe detected box(b) 不同预测框和检测框具有相同欧氏距离(b) Different predicted boxes have same Euclideandistances with the detected boxxOO检测框检测框2预测框2预测框1预测框1预测框图 1 IoU 度量和欧氏距离度量失效情况Fig. 1 Invalid cases about IoU metrics andEuclidean distance metrics10 期熊珍凯等: 基于激光雷达的无人驾驶3D 多目标跟踪2075最小二乘逼近, 能够建立起状态变量随时间变化的方程, 从而估计出今后某个时刻的状态.卡尔曼滤波算法的核心包括如下几个方程:1) 描述预测过程中, 系统的状态向量预测方程A B U kk ˆXk k X k −1k −1W k −1k −1其中, 为状态转移矩阵, 为控制输入矩阵, 表示 时刻的控制输入向量, 表示 时刻状态的预测值, 表示 时刻的状态输出值, 为 时刻的状态转移过程中的随机干扰噪声, 表现为均值为零的高斯白噪声.2) 描述先验估计协方差矩阵的更新过程Q W k ˆPk k 其中, 为状态转移过程噪声 的协方差矩阵, 为时刻的先验估计协方差矩阵的预测值.3) 描述观测模型中由系统观测值得到系统观测向量的过程H Z k k V k 其中, 为状态观测矩阵, 为 时刻状态变量的观测值, 为状态观测过程中的随机干扰噪声向量, 表现为均值为零的高斯白噪声.4) 卡尔曼滤波增益方程 (权重)K k k R V k 其中, 表示 时刻的卡尔曼增益, 为观测噪声 的协方差矩阵.k 5) 卡尔曼滤波估计方程 ( 时刻的最优状态估计)X k k 其中, 表示 时刻状态向量经过卡尔曼滤波后的最优估计, 是系统的实际输出值, 表现为在预测值的基础上按照卡尔曼滤波增益叠加一个预测误差项.k 6) 卡尔曼滤波协方差估计方程( 时刻的最优协方差估计)P k k 其中, 为 时刻卡尔曼滤波的后验估计协方差矩阵的预测值. 该方程用来描述状态向量协方差矩阵的变化过程, 正是这种不断更新的机制才能保证卡尔曼滤波不断克服随机噪声的影响.卡尔曼滤波算法能够在不准确的测量数据基础上尽可能地消除噪声的影响, 对真实值做出预测. 目标跟踪算法把跟踪目标的属性作为状态变量, 利用卡尔曼滤波器对属性进行线性滤波, 得到更好的预测值.2.2.1 状态预测为了预测上一帧到当前帧的目标状态, 这里使用恒定速度模型估计对象间的帧间位移, 将目标状态表示成一个11维向量, 即x y z l wh θs v x v y v z x y z 其中, , 和 分别表示目标的中心点坐标, , 和 分别表示目标的3D 边框尺度, 为目标边框的航向角, 表示当前轨迹的置信度分数, , 和 分别为目标在三维空间中沿 , 和 轴方向上的运动速度.k −1第 帧数据中的所有目标状态构成的集合表示为ξik −1k−1i m k −1k −1k −1k 其中, 表示在 时刻的第 个目标状态, 表示在 时刻存在的目标数量. 通过 时刻的目标状态, 根据恒定速度模型可以估计出第 帧的目标状态. 目标的预测位置为k −1ξik −1k ξik 对于 时刻的每个目标状态 都可以给出 时刻的预测状态 .新出现的轨迹与目标丢失的轨迹完成匹配的目标预测目标基于 BIoU 度量的目标关联自适应生存周期管理具有唯一ID 的目标检测目标匹配失败的跟踪目标轨迹关联原始点云3D 目标检测3D 卡尔曼滤波T kT k − 1匹配失败的检测目标图 2 基于BIoU 和自适应生存周期的3D 多目标跟踪Fig. 2 3D multi-object tracking based on BIoU and adaptive birth and death memory2076自 动 化 学 报49 卷2.2.2 状态更新根据数据关联的结果, 可以将跟踪目标与检测目标分为4类: 跟踪匹配成功、检测匹配成功、跟踪匹配失败和检测匹配失败. 它们各自的具体形式为T match D match w k T unmatch D unmatch m k −1n k D match 其中, 和 表示匹配成功的跟踪目标与检测目标, 表示当前时刻匹配成功的数量,和 分别表示匹配失败的跟踪目标和检测目标, 表示上一时刻的所有跟踪目标数量, 表示当前时刻的检测目标数量. 完成匹配之后, 使用匹配成功的目标 根据贝叶斯规则更新对应的目标状态.2.3 基于BIoU 的匈牙利匹配算法为了解决传统IoU 度量或距离度量的失效问题, 本文设计了一种结合欧氏距离与IoU 的综合度量指标, 即BIoU 度量, 它由原始IoU 和边界距离惩罚项共同组成, 具体形式为IoU (B 1,B 2)R BIoU γp lt 1,p rb 1,p lt 2,p rb 2ρ(·)C max (B 1,B 2)IoU (B 1,B 2)ρ(p lt 1,p lt 2)ρ(p rb 1,p rb 2)C max (B 1,B 2)其中, 表示一般意义下的两个边界框的交并比, 为基于边界欧氏距离的惩罚项, 是惩罚项因子, 分别表示两个边界框最小外接框的左上顶点和右下顶点, 函数 为两个顶点间的欧氏距离, 表示两个边界框最小外接框的最大对角线距离, 用于对边界距离进行归一化处理. 需要说明的是, 采用最小外接框的方法可以弱化旋转对边界距离的影响, 便于计算边界距离.图3(a)展示了2D BIoU 的计算方法. 绿色和蓝色实线框代表两个不同的边界框, 虚线框为它们各自的最小外接框, 灰色区域表示 ,红色线段表示边界距离 和 ,黄色线段表示最大对角线距离 .对于3D 多目标跟踪, 本文将上述2D BIoU 的定义扩展到3D 坐标系下, 如图3(b)所示. 3D BIoU 的计算式为IoU 3D (V 1,V 2)V 1V 2R BIoU 3D p lft 1,p lft 2,p rrb 1,p rrb 2ρ(p lft 1,p lft 2)ρ(p rrb 1,p rrb 2)C max (V 1,V 2)BIoU thres BIoU 3D <BIoU thres 其中, 表示两个3D 边界框 和 的体积交并比 (图中的灰色区域), 惩罚项 与边界距离相关, 分别是两个3D 边界框最小外接框的左−前−上顶点和右−后−下顶点, 和 分别是对应边界距离 (图中的红色线段), 则表示两个最小外接框所有顶点间的最大对角线距离 (图中的黄色线段). 在给定阈值 的情况下, 当 时,则认为两个3D 边界框匹配失败, 即两个3D 边界框分别属于独立的两个不同目标.2.4 自适应生存周期管理策略F min F max 在多目标跟踪中, 现有目标会离开视野, 也可能有新目标进入视野, 因此需要一个模块来管理轨迹的产生和删除. 生存周期管理是常见的做法: 将所有未成功匹配的检测目标视为潜在的新轨迹, 为了避免跟踪误报, 只有在该目标连续检测到 帧后才认为是一个新的目标轨迹; 将所有未成功匹配的跟踪目标结果视为即将离开视野的轨迹, 为了避免误删轨迹, 只有该目标未成功匹配 帧后才视为目标丢失并将其删除. 理想情况下, 该策略可以保留因为单帧漏检未能成功匹配的目标轨迹, 并仅删除已经离开视野的目标轨迹. 但在实际中, 3D 目p lft 1p lt 1p lt 2p lft 2p rrb 1p rrb 2p rb 1p rb 2m a x (V 1, V 2)ma x(B1, B 2)IoU 3D (V 1, V 2 )IoU (B 1, B 2 )V 2B 2B 1V 1r (p rrb 1, p rrb 2)r (pr b1, pr b2)r (p l f t 1, p l f t 2)r (pl t 1, pl t 2)(a) 2D 边界交并比(a) 2D BIoU (b) 3D 边界交并比(b) 3D BIoU图 3 边界交并比示意图Fig. 3 Schematic diagram of BIoU10 期熊珍凯等: 基于激光雷达的无人驾驶3D 多目标跟踪2077标检测器的误检和漏检普遍存在, 采用固定的生存周期管理策略, 将出现错误的跟踪轨迹. 原因主要是固定的生存周期管理策略未有效利用检测目标的置信度信息, 而对所有目标均进行相同周期的检查操作, 从而导致检测置信度较低的目标 (往往为误检目标) 也需要跟踪多帧后才会被删除, 而检测置信度较高的目标一旦被多帧遮挡 (往往出现漏检)也可能被删除.因此, 本文提出一种自适应生存周期管理策略,根据目标检测结果的置信度, 动态调整最大生存周期, 具体为score αβσ(·)F max F Amax αβF max =3,α=0.5,β=−5其中, 为当前目标的检测置信度, 和 为尺度系数和偏移系数, 表示Sigmoid 非线性函数, 为最大生存周期, 为根据目标检测置信度计算后的生存周期. 通过选取合适的 和 , 实现更好的跟踪效果. 图4给出了当 时生存周期与检测置信度之间的关系. 利用Sig-moid 函数的S 型曲线特性, 检测目标的置信度越高, 该目标的生存周期将会越长, 从而实现生存周期动态调整.32F A m a x10010置信度−102030图 4 自适应生存周期Fig. 4 Adaptive birth and death memory3 实验结果与分析3.1 数据集与评价指标介绍本实验基于KITTI 数据集的多目标跟踪基准进行评估, 该基准由21个训练序列和29个测试序列组成. 对于每个序列都提供了LiDAR 点云、RGB 图像以及校准文件. 用于训练和测试的数据帧数分别为8 008和11 095. 对于测试集数据, KITTI 不向用户提供任何标签, 而是在服务器上保留标签以进行MOT 评估. 对于训练集数据, 含有30 601个目标和636条轨迹, 同样包括Car 、Pedestrian 和Cyclist 类别. 由于本文使用的目标跟踪系统是基于卡尔曼滤波算法的, 不需要进行深度学习训练, 因此将所有21个训练序列作为验证集进行验证. 实验对比了Car 、Pedestrian 和Cyclist 全部3个类别上的多目标跟踪效果.对于多目标跟踪方法, 理想的评价指标应当能够同时满足3个要求: 1) 所有出现的目标都能够及时被发现; 2) 找到的目标位置应当尽可能和真实的目标位置一致; 3) 应当保持目标跟踪的一致性, 避免目标标志的频繁切换. 根据上述要求, 传统的多目标跟踪将评价指标设置为以下内容: 多目标跟踪准确度 (Multi-object tracking accuracy, MOTA)用于确定目标的个数以及跟踪过程中的误差累计,多目标跟踪精度 (Multi-object tracking precision,MOTP) 用于衡量目标位置上的精确度, 主要跟踪轨迹命中率 (Mostly tracked, MT), 主要丢失轨迹丢失率 (Mostly lost, ML), 身份切换次数 (ID swit-ch, IDS), 跟踪打断次数 (Fragment, FRAG) 等.3.2 实验结果实验流程如图5所示, 其中3D 目标检测器使用与A B 3D M O T 算法相同的、已经训练好的PointRCNN 模型. 在目标匹配阶段, 使用本文提出的BIoU 计算预测框与目标框之间的关联度, 然后使用匈牙利匹配算法进行目标匹配. 成功匹配的目标送入卡尔曼滤波器进行状态更新, 未成功匹配的检测目标和预测目标均送入自适应周期管理模块进行判定. 自适应周期管理模块根据目标的置信度分数自适应调整目标的最大生存周期, 删除已达到最大生存周期而仍未匹配成功的目标, 最终得出具备唯一ID 标号的目标轨迹. BIoU 和自适应生存周期管理中涉及的参数通过整定得到, 最终模型使用的参数如表1所示.为了验证本文所提出的基于BIoU 度量和自适应生存周期管理多目标跟踪算法的性能, 本文与基准AB3DMOT 算法在KITTI 多目标跟踪数据集的3类目标上进行了对比; 同时在Car 类别上还与另外两种端到端的深度学习算法FANTrack [21] 和DiTNet [22] 进行了比较. 实验结果如表2所示.表2的结果表明, 本文提出的基于BIoU 度量和自适应生存周期管理策略的多目标跟踪算法相比于基准算法在3类目标上均获得了更高的MT 值,意味着本文算法在对目标的长时间跟踪性能上明显优于基准算法; 在Pedestrian 和Cyclist 两个类别上, 跟踪准确度MOTA 较基准算法有显著提升, 而在Car 类别上与基准算法基本一致. 最值得注意的是, 本文算法在命中率MT 和丢失率ML 这两项指标上均有显著提升, 说明了本文算法在长时间稳定2078自 动 化 学 报49 卷跟踪目标这个问题上具有明显优势. 另外, 在Ped-estrian和Cyclist两类目标的跟踪任务上获得更好的效果, 也说明了基于BIoU的目标跟踪可以有效提高对小目标的跟踪性能. 分析其原因, 可以发现小目标更易于出现检测框与预测框交集较少或无交集的情况, 这也正是BIoU相较于传统IoU最大的优点, 即解决IoU相等或IoU = 0时的关联度量问题.图6和图7分别展示在出现误检和漏检情况时, 本文所提出改进跟踪算法和基准算法的跟踪结果. 在图6的第2行中, 两类算法均出现了误检的情况 (用红色圆圈标记), 但相较于基准算法(图6(a)的第1行), 由于引入了自适应生存周期管理,因此在下一帧数据中, 改进跟踪算法及时将误检目标删除, 而基准跟踪算法仍会对误检目标进行持续跟踪, 直到生存周期结束. 上述结果表明基于本文改进的跟踪算法可以明显减小误检目标的生存周期, 降低误检次数.同样, 对于目标漏检的情况, 本文算法也能给出更好的结果. 图7 (a)的第3行中, 由于红色圆圈标记的目标被其他物体遮挡而导致漏检, 在下一帧中, 该目标再次被检测到时, 已被标记为新的目标(这一点从对比图7(a)的第2行和图7(a)的第4行中检测框颜色不一致可以看出). 而使用本文提出的改进算法, 即使在图7(b)的第3行中出现了遮挡,因为生存周期并未结束, 因此目标仍然在持续跟踪, 也未发生身份切换的问题. 这说明, 在由于目标遮挡等问题出现漏检时, 本文提出的改进跟踪算法可以有效克服漏检问题, 保持目标持续跟踪与ID 恒定.3.3 消融实验对比F max=5F maxF AmaxF Amax为了进一步说明BIoU度量和自适应生存周期管理策略的实际效果, 本文在KITTI验证集上进行了消融实验. 为了便于比较, 本文设置最大生存周期; 对于固定生存周期策略, 生存周期即为; 对于自适应生存周期策略, 采用式 (13) 描述的关系自适应计算生存周期. 消融实验的结果如表3所示, 其中不使用BIoU和的跟踪方法即为原始AB3DMOT算法.首先, 对BIoU进行性能分析. 在表3中, 每类目标的第2行数据与第1行相比, 区别在于使用BIoU表 1 模型参数Table 1 Model parameters参数值说明γ0.05BIoU惩罚因子α0.5生存周期尺度系数β4生存周期偏移系数F max3 (Car)5 (Others)最大生存周期对Car目标为3对其他类别目标为5F min3目标轨迹的最小跟踪周期该值与AB3DMOT相同BIoU thres−0.01BIoU阈值小于阈值认为匹配失败具有唯一 ID 标号的跟踪结果跟踪结果自适应生存周期管理基于 BIoU 的目标匹配卡尔曼滤波器匹配失败检测目标检测目标3D 目标检测网络匹配失败预测目标预测目标匹配目标上一时刻轨迹当前时刻轨迹轨迹关联新加入轨迹与需要丢弃轨迹32FAmax1010置信度−102030p ltp ltB21X^k = AX k − 1k −+ BU k + WP^k = AP k − 1A T + QZk= HX k+V kKk= P^k H T(HP^k H T + R)−1Xk= X^k + K k(Z k−HX^k)Pk= (I−K k H)P^k B1d1d2max(B1, B2)p rbp rb图 5 基于激光雷达的3D多目标跟踪整体流程Fig. 5 Overall pipeline for LiDAR-based 3D multi-object tracking10 期熊珍凯等: 基于激光雷达的无人驾驶3D多目标跟踪2079。
Wmicrotracker Installation Guide and User Manual
Wmicrotracker®Installation Guideand User ManualDual Mode Infrared Imaging systemMulti-Worm Path Tracking (Machine Learning Algorithm) + Infrared Light scattering detectionData Acquisition System: SMARTHardware Version: SMART V 1.2Software Version: SMART V1.1 (2022)Thank you for acquiring the SMART system.The following document will guide you through the installation process.This product is protected under international patents:P20060105084AR,PCT/IB2007/054628, EPO&US patent granted,owned by the Argentinian National Research Council CONICET and licensed to PHYLUMTECH S.A;and P20190100121AR,PCT/ES2020/070029,EPO&US patent owned by PHYLUMTECH S.A.Any partial or total copy is prohibited and will be subject to law penalties.Product provided for use “AS IS”.No modifications allowed without PHYLUMTECH permission.When the client acquires this product, the client understands and accepts these rules.For research purposes only. Not for human diagnostic use. (©2022). Made in Argentina.ContentsI.About the SMART-Included Components-Additional Requirements-Product Dimensions and Manufacturing II.Data output examplesIII.Installation and Setup Guide-Software Installation-Hardware SetupIV.Software Use-Software Launch-Main Screen Components and OperationI.About the SMARTWMicrotracker SMART is a modular bug tracking system to quantify small organisms behavior in small Petri dish format(35mm Petri dish).It allows reliable quantification of animal population anism compatibility includes: C.elegans and related nematodes, zebrafish larvae, drosophila larvae, and small insects.It has the capability to work in 2 different modes:1-Face-down IR Imaging:Allows the Multi Worm Path Tracking using NGM cultures.2-IR Light Scattering:allows the overall quantification of small animal movement in liquid and NGM culture using a big microbeam infrared array.Some technical characteristics:- non invasive acquisition- undisturbed by bacteria.- Compatible with RNAi and compound screenings.Using this approach it is possible to evaluate multiple protocols using agar cultured animals,liquid culture media and air cultured insects.Preferred microplate culture format for SMART is 35 mm clear petri dishes;Recommended:●35 mm (Greiner Bio-One #627161)NOTE: Petri plate must be run with the lid on. It is recommended to seal the plate with film.Included ComponentsAdditional Requirements●IBM PC compatible with the following minimum requirements:○Pentium Core i3 processor or above○2Gb of RAM memory○ 1 USB port available to power WiFi access point.○MSWindows 7 (or higher) operating system○> 1Gb of free HD space for experiment images storage.●Ambient operating temperature of10ºC to40ºC with humidity below50%.Thisrange is for optimal functionality of equipment only;biological samples may have unique temperature requirements.●Minimize the vibration and dust in your working area.●Do NOT locate the instrument near a clear window or bright light.Product Dimensions and Manufacturing●LWH 10cm x 10cm x 22cm (3.94in x 3.94in x 8.66in).●Manufacturing Technology: 3D PrintingII. Data output Examples: Path Tracking modeC.elegans Levamisole curve [Toxicity/Anthelmintics research] WMicrotracker SMART is able to get and plot the path tracking of a population of worms, calculating average movement speed in real time.A kinetics plot comparing levamisole concentration treatment(0to200uM)is shown below.The plots show the correlation between levamisole concentration and movement speed decrease.Using a 5 minute acquisition lapse every hour, the WMicrotracker SMART is able to quantify the effect of levamisole paralysis on C.elegans worms.Protocol:1. Grow synchronized populations of adult day-1 worms in seeding NGM plates (OP50).2. Remove worms from plates using M9 buffer and transfer them in a sterile 2ml micro tube.3. Let the worms settle. Decant the supernatant taking care not to disturb the pellet.4. Perform a wash with 2 ml of M9 buffer. Briefly shake or invert the tube5. Repeat the decantation step. Throw out the supernatant.6. Add 2 ml of M9 buffer.7. Count the number of worms in 10 µl in triplicate and calculate the average.8. Prepare a suspension to get [25 worms/10 µl]9. Transfer 10 µl of worm solution to a 35mm plate. Wait until the drop is absorbed.10.5minutes later,register worm activity using WMicrotracker SMART during5minutes. Immediately before the acquisition,stimulate the worms by subjecting the plate to mechanical stimulus (tap 3x).Microplate preparation:•NGM was prepared following standard procedure.•Levamisole is added to the55°C NGM agar solution immediately after the addition of the salts and cholesterol.• Levamisole plates were not seeded with OP50.•The assay is performed on plates that had been allowed to template to room temperature prior to the start of the experiment.•Before adding the worms to each plate,make a ring of100mM copper sulfate around the edge of each plate to prevent worms from crawling out of the agar.•When adding the worms,be careful not to scratch the agar–worms tend to crawl into any break in the agar surface.C.elegans detection curve [Optimization of animal number]As shown below,the software is able to automatically recognize and follow up to80%of the particles.Experiments can be performed using 10 to 30 worms per 35mm Petri dish. Protocol:1. Grow synchronized populations of adult day-1 worms in seeding NGM plates (OP50).2. Remove worms from plates using M9 buffer and transfer them in a sterile 2ml micro tube.3. Let the worms settle. Decant the supernatant taking care not to disturb the pellet.4. Perform a wash with 2 ml of M9 buffer. Briefly shake or invert the tube5. Repeat the decantation step. Throw out the supernatant.6. Add 2 ml of M9 buffer.7. Count the number of worms in 10 µl in triplicate and calculate the average.8.Prepare one plate extra with more than10worms to train the software.(See Manual Page12- 1.d. Silhouette detection).9.Transfer to35mm NGM plates without food the different number of worms:1/5/10/20/40.Check at the magnifying glass the number of worms transferred. Wait until the drop is absorbed.10.5minutes later,register worm activity using WMicrotracker SMART during5minutes.Immediately before the acquisition, stimulate the worms by subjecting the plate to mechanical stimulus (tap x3). Notes:•Before adding the worms to each plate,make a ring of100mM copper sulfate around the edge of each plate to prevent worms from crawling out of the agar.•When adding the worms,be careful not to scratch the agar–worms tend to crawl into any break in the agar surface.III. Installation & Setup GuideSoftware InstallationWe recommend periodically referencing the Phylumtech website for software updates.1.You’ll find the Software Installation.zip folder for downloading at Software downloadzone(https:///home/en/support/).To download right-click the link and choose "save link as".2.Unzip the files and copy WMicrotracker_smart folder to c:\wmicrotracker_smartfolder and follow the instructions:a.Plug the USB-Wifi communication device.It will create a WiFi Network called“”b.Connect your computer to the WiFi network“”using thepassword “WMicroSMART”c.Run the WMicrotracker_smart_vXX.exe executable fileAdditional comments:-Because the WMicrotracker SMART uses a direct WiFi communication protocol,unless you have a wired LAN,the internet will not be available on your PC when you connect to the device.Hardware Turn on and Setup1.Plug the USB-Wifi communication device2.Connect your computer to the WiFi network“”using the password“WMicroSMART”.3.Plug in the power supply(5VDC Switching Power Supply with1Amp output)to anyregular Power Outlet and the microUSB cable to the back of your SMART.The display will turn ON.4.The display will turn ON and will show the network configured password while tryingto connect to the “” WiFi network (wait a few seconds).If after1minute the equipment fails to connect,check“”network availability, and restart the equipment by unplugging it for a few seconds.5.After successful connection,the display will show the assigned IP(identificationnumber)in the Wi-Fi network.This number is used to link the acquisition software to the device.Note:This random number is automatically assigned by the Access Point(WiFi router) at connection time.IV. Acquisition SoftwareSoftware Launch1.Run the“WMicroSmart”executable file from the folder you chose during the installation step. The application should start immediately with this “Start Window”.2.Press Start New acquisition to connect your SMART.The following window will appear:plete the Device ID with the IP indicated on the display. For example;4.Press the Connect button.If the connection succeeds,you will enter the data acquisition WindowData acquisition Window: Screen Components and Operation1. Plate Setup& training is shown when you configure the IP device in the software.a.Plate Layout:i.Petri plate Box:-Currently the WMTK SMART has been validated to work with 35 mm format.The picture is a photo of the plate during the last connection with the device.While setting the focus of the device you will be able to see the plate in real time.b. MODE Menu:i.a.“Tracking Mode”for C.elegans and similar nematodes cultured on agar:-In this mode,the system exploits the optical property of light phase transition (air-worm-agar)to magnify worm silhouettes when exposed to infrared light.A similar phenomena has been described in FIM applications(A Multi-Purpose Worm Tracker Based on FIM|bioRxiv).High resolution images are processed using machine learning algorithms to identify single worms and to track their trajectories.-The petri dish must be placed face down(with the lid down and the appropriate plate adapter)for detection of worms cultured on NGM.It is only compatible with adult stage C.elegans and similar sized worms.i.b. “Tracking Mode”for small aquatic animals and insects:-The petri dish must be placed face up(with the lid up and the appropriate plate adapter) for detection of organisms higher than 1mm.ii.“Microbeam” Mode:The microgrid plate adapter possesses a grid composed of more than 2.000 microholes,100um wide.Activity detection for this mode is based on determining frame to frame microbeam lights fluctuation by using a pixel to pixel image subtraction algorithm.If the pixel neighbor difference is bigger than a threshold, then an activity accumulator is incremented.This calculation mode uses low resolution video images with no single worm detection.-The petri dish must be placed face up(with the lid up)with the appropriate microgrid plate adapter.c. Focus and Plate position:i.The arrows allow you to move the position of the registration area(red circle) of your petri dish. “Up”, “Down”, “>” Right, “<” Left.ii.“Diameter”:Allows you to enlarge or reduce the registration area(red circle) of your petri dish.It is important to place the red circle on the edge of the35mm-base dish.iii.Focus:Allows you to acquire real time images in order to adjust the lens focus using the focus wheel on theback of the SMART.The time toadjust the focus is set to20seconds.If it is not achieved in thattime, you can press it again.d. Silhouette detection (only enabled for tracking mode):i.“New”button:Allows the software to be trained to recognize silhouettes.To select silhouettes of organisms in the image,just click with the left mouse button on the particle (click 5 to 10 representative organisms). For example;Box size:increase or decrease the size of the box so that the whole microorganism fits inside.The reference box size for C.elegans is35to45pixels according to the worm stage.Then press the “APPLY” button and the shadows of the animals will turn redFinally, press “OK” to save the training parametersii.“Test training”Allows to check the performance of recorded silhouette recognition patterns.2.Image acquisition screen is shown when you select the“Next>”button on theFirst screen Setup.a. Status Bar:i.“Status Bar”:-Shows as a yellow bar the progress of the run time.b. Data Acquisition:i.“Acquisition” Lapse time:- Set the total run time for the petri plate reading, in minutes- Current software version allows 5 minute lapse time by default.c. Project folder Menu:i.You can create and name a new project folder by typing in the box.ii.You can call a previous project name if you display the box.Project folder will be saved inside your software installation folder.STARTING acquisition:After configuring the run, press the START button to initiate acquisition.A pop-up window will appear to enter the acquisition name.Write a name for your experiment in order to recognize future data recalls.The window will show the results progression, and real time image acquisition.Depending on the mode initially selected“TRACKING”or“MICROBEAM”,the registration mode and the information displayed in the report will be different.Below each of the modes will be detailed individually:⇨TRACKING ModeThe system will start capturing1image per second,processing each image in real time to detect and follow single animals within the plate.OUTPUT Results/ReportReport file [report.csv]:- Report file contains quantification results grouped by user defined time-block:Average population results:#Particles detected (average number per frame)Particle speed [mm/s]Traveled distance [mm/particle]Rotation Index->an index representing the change in rotation of animal body shapes.It is useful for lifespan experiments,or animals that stay in place doing small movements, but not long trails.Single particles results:A list of results for every single detected particle.●Additional data output recording is explained on Annex IANNEX IFile recording description:Additional files:The following raw data files will be located into project acquisition folder:\img foldercontains all images captured during the acquisition lapse.This images can be used to generate a .GIF or .AVI video using ImageJ softwareImages are enumerated by System_ID + Frame Timing (in seconds).Each image file size is about 50 to 100kbytes\bmp folderit contains the exported images for incremental worm trailsWorm_trails.csvThis is the data file containing worm tracks.The data can be processed by the user with his own algorithm to determine additional outputs(such as particle vector direction, distribution of particles within plate, etc). Data is structured in the following way:*Additional information includes worm shaperundata.datIt contains acquisition configuration ( system_ID, folder, project date, acquisition lapse) training.datIt contains the parameters used by machine learning algorithmsdescriptor.datIt contains a sample of box frames used for trainingxy_worms.txt and xy_worms.binIt contains information(ascii or binary)about each particle detected on each frame.This data is used by the software to build Worm trails.IR Microbeam Ligth Scattering MODE*To be included in future manual versionsExample of capture of microbeams:Activity detection for this mode is based on determining frame to frame microbeam lights fluctuation by using a pixel to pixel image subtraction algorithm.Example of worm population activity detected in 35mm Petri dish with NGM agar:Using this method is possible to quantify locomotor activity of worm population cultured in liquid or agar medium,and get statistical information of worm population location (useful for chemotaxis experiments)*for more information and application of this acquisition method data check WMicrotracker ARENA user MANUAL.For more information contact us *******************。
高科技教学的英语作文
高科技教学的英语作文High-Tech Teaching Methods in the ClassroomThe integration of high-tech teaching methods in the classroom has become increasingly prevalent in recent years. As technology continues to advance at a rapid pace, educators have recognized the potential benefits of incorporating these innovative tools and techniques into the learning environment. This essay will explore the various ways in which high-tech teaching methods can enhance the educational experience for both students and teachers.One of the primary advantages of high-tech teaching methods is the ability to engage students in a more interactive and dynamic learning process. Traditional lecture-based instruction can often be passive and uninspiring, leaving students disinterested and disengaged. However, the use of interactive whiteboards, multimedia presentations, and educational software can captivate students' attention and encourage active participation. These technologies allow teachers to present information in a visually appealing and multisensory manner, catering to different learning styles and fostering a more engaging and immersive learning experience.Moreover, high-tech teaching methods can facilitate personalized and adaptive learning. By utilizing educational software and digital platforms, teachers can tailor their instruction to the individual needs and abilities of each student. These technologies can provide real-time feedback, identify areas of strength and weakness, and adapt the learning content and pace accordingly. This personalized approach can help students to progress at their own pace, address their specific challenges, and maximize their learning outcomes.Another significant advantage of high-tech teaching methods is the ability to access a wealth of information and resources. With the internet and various online databases, teachers can readily incorporate a diverse range of educational materials into their lessons, from interactive simulations and virtual field trips to online lectures and educational videos. This access to a vast array of digital resources can enrich the learning experience and provide students with a more comprehensive and multifaceted understanding of the subject matter.Furthermore, high-tech teaching methods can enhance collaboration and communication among students. Many educational technologies, such as online discussion forums, collaborative writing platforms, and video conferencing tools, allow students to work together on projects, share ideas, and engage in meaningful discussions. This collaborative approach can foster a sense of community within theclassroom, encourage critical thinking and problem-solving skills, and prepare students for the collaborative nature of the modern workplace.In addition to the benefits for students, high-tech teaching methods can also enhance the efficiency and effectiveness of teachers' work. Digital tools and resources can streamline administrative tasks, such as grading, attendance tracking, and lesson planning, freeing up more time for teachers to focus on their primary role of facilitating learning. Moreover, the ability to access and analyze real-time data on student performance can help teachers identify areas for improvement and tailor their instruction accordingly, leading to more effective teaching and better learning outcomes.However, it is important to acknowledge the potential challenges and limitations associated with high-tech teaching methods. Implementing these technologies can require significant financial investment, as well as ongoing training and support for both teachers and students. Additionally, there are concerns about the potential for technology to exacerbate existing inequalities, as not all students may have equal access to the necessary devices and internet connectivity.Despite these challenges, the benefits of high-tech teaching methods in the classroom are undeniable. By harnessing the powerof technology, educators can create a more engaging, personalized, and collaborative learning environment, ultimately preparing students for the demands of the 21st century. As technology continues to evolve, it is crucial for educators to stay informed and adaptable, embracing the opportunities presented by high-tech teaching methods to enhance the educational experience for all learners.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Learning for Multi-View3D Tracking in theContext of Particle FiltersJuergen Gall1,Bodo Rosenhahn1,Thomas Brox2,and Hans-Peter Seidel11Max-Planck Institute for Computer ScienceStuhlsatzenhausweg85,66123Saarbr¨u cken,Germany{jgall,rosenhahn,hpseidel}@mpi-sb.mpg.de2CVPR Group,Department of Computer Science,University of BonnR¨o merstr.164,53113Bonn,Germanybrox@cs.uni-bonn.deAbstract.In this paper we present an approach to use prior knowledgein the particlefilter framework for3D tracking,i.e.estimating the stateparameters such as joint angles of a3D object.The probability of theobject’s states,including correlations between the state parameters,islearned a priori from training samples.We introduce a framework thatintegrates this knowledge into the family of particlefilters and partic-ularly into the annealed particlefilter scheme.Furthermore,we showthat the annealed particlefilter also works with a variational model forlevel set based image segmentation that does not rely on backgroundsubtraction and,hence,does not depend on a static background.In ourexperiments,we use a four camera set-up for tracking the lower part ofa human body by a kinematic model with18degrees of freedom.Wedemonstrate the increased accuracy due to the prior knowledge and therobustness of our approach to image distortions.Finally,we compare theresults of our multi-view tracking system quantitatively to the outcomeof an industrial marker based tracking system.1IntroductionModel-based3D tracking means to estimate the pose of a3D object where the pose is determined by a value in a state space E.In the case of an articulated model of a human body,the pose is completely described by a3D rigid body motion that has6degrees of freedom and the joint angles,which are12in this paper.This yields a high-dimensional state space that makes the tracking process difficult.Particlefilters[1],however,can deal with high dimensions.A basic particlefilter termed condensation has been used for contour tracking[2]. However,this algorithm lacks performance for3D tracking.A heuristic that is based on thesefilters and that was successfully used for multi-view3D tracking is the annealed particlefilter(APF)[3].In contrast to conventional particlefilters, this method does not estimate the posterior distribution.Instead it performs a stochastic search for the global maximum of a weighting function.The two main drawbacks of the APF as applied in[3]are the simplified,unconstrained2Juergen Gall,Bodo Rosenhahn,Thomas Brox,and Hans-Peter Seidel kinematic model that results in a large number of particles needed for tracking and the assumption of a static background.The present paper addresses thefirst one by considering correlations between the state parameters as a soft constraint where the correlations are learned a ing a level set based segmentation instead of background subtraction lifts the second assumption.The idea to improve the model for3D tracking by integrating prior knowledge is not new.In[4],training data acquired with a commercial motion capture sys-tem was used to learn a dynamical motion model(e.g.walking).This stabilizes the tracking as long as the assumptions are valid,but otherwise it is mislead-ing and results in tracking failures.Hence,a large motion database is needed to learn more complicated motion models[5].Hard constraints were also intro-duced for the3D model such as anatomical joint angle limits and prevention of self-intersections[6].This reduces the state space,but it does not consider the probability of different poses.In[7],it was suggested to learn a Gaussian mix-ture in a state space with reduced dimension,whereas the work in[8]captures the training data by a nonparametric Parzen density estimator.Our approach embarks on this latter strategy.In previous works,a variational model for level set based image segmentation incorporating color and texture[9]has already been successfully used for pose estimation[10].It is not based on background subtraction and,thus,does not necessarily need a static background.We combine this method with the APF to make the algorithm moreflexible for applications.The paper is organized as follows.We begin with a brief outline of the fun-damental techniques,namely the APF and the variational model for image seg-mentation.Afterwards,in Section3,we present the probabilistic model and motivate its choice.Furthermore,a full integration into a Bayesian framework is derived.Section4combines the prior knowledge with the methods from Sec-tion2and applies it to multi-view3D tracking.The effect of the learned prior is demonstrated in Section4.For our experiments we use a four camera set-up for tracking the lower part of a human body.Our articulated model consists of 18degrees of freedom,and we will report on the robustness in the presence of occlusions and noise.Finally,we compare the results of our multi-view tracking system with a marker based tracking system.This provides a quantitative error measure.The paper ends with a brief summary.2Previous Work2.1Annealed Particle FilterThe APF does not approximate a distribution,usually the posterior distribution, like other particlefilters[11].Instead it performs a stochastic search for the global minimum of an“energy”function V≥0by using n particles that are random variables in the state space.In accordance with simulated annealing[12],the weighting function is a Boltzmann-Gibbs measure that is defined in terms of VLecture Notes in Computer Science3 and an inverse“temperature”β>0by1g(x)βλ(dx):=Sample˜x(i)t+1,M from p(x t+1|x(i)t,0)λ(dx t+1)Update:4Juergen Gall,Bodo Rosenhahn,Thomas Brox,and Hans-Peter SeidelthatΦi(x)>0if x∈Ωi1andΦi(x)<0if x∈Ωi2.The contour of an object is thus represented by the zero-level line.The approach described in[13]uses a variational model that integrates the contour of a prior poseΦi0( x)for each view i.It minimizes the energy functional E( x,Φ1,...,Φr)= r i=1E( x,Φi)whereE( x,Φi)=− Ωi H(Φi)ln p i1+(1−H(Φi))ln p i2dx+ν Ωi ∇H(Φi) dx+λ Ωi Φi−Φi0( x) 2dx(2)and H is a regularized version of the step function.Minimizing thefirst term corresponds to maximizing the a-posteriori prob-ability of all pixel assignments given the probability densities p i1and p i2ofΩi1 andΩi2,respectively.These densities are modeled by local Gaussian densities. The second term minimizes the length of the contour and smoothes the resulting contour.The last one penalizes the discrepancy to the shape prior.The relative influence of the three terms is controlled by the constant weighting parameters ν≥0andλ≥0.The interaction between segmentation with shape prior and the APF is illustrated in Figure1.It has been shown that this method is robust in the case of a non-static background and that it is also able to deal with clutter, shadows,reflections,and noise[13].3Prior Knowledge in the Bayesian FrameworkIn the Bayesian framework,the particles arefirst predicted according to the transition density p(x t+1|x t)and then updated by the likelihood p(y t+1|x t+1), where y t is the observation at time t.The transition density,denoted by p pred,is often modeled as zero-mean Gaussian since an accurate model is not available. This weak model does not include prior knowledge in an appropriate way.Since a precise model of the dynamics is not available for many applications,we combine the simple dynamical model p pred with the probability density of the resulting pose p pose that leads to a new transition density1p(x t+1|x t):=p pred(x t+1|x t)p(x t|y0,...,y t)dx t,(4)Z(x t)p(y t+1|x t+1)p pose(x t+1)p (x t+1|y0,...,y t)p(x t+1|y0,...,y t+1)=Lecture Notes in Computer Science5 where Equation(4)describes the prediction step and Equation(5)the update step.It is obvious that p is a density function,but not a probability den-sity function,satisfying p(x t+1|y0,...,y t)=p pose(x t+1)p (x t+1|y0,...,y t).Note that sampling from the distribution p pred(x t+1|x t)/Z(x t)λ(dx t+1)is equivalent to sample from p pred(x t+1|x t)λ(dx t+1)for a given x t.Hence,the prediction step of the particlefilter remains unchanged,while the particles are weighted by the product p(y t+1|x t+1)p pose(x t+1)instead of the likelihood during updating.Only in rare cases we are able to give an analytical expression for p pose. Instead,we suggest to learn the probability of the various poses from afinite set of training samples.For a nonparametric estimate of the density we use a Parzen-Rosenblatt estimator[14]p pose(x)=12σ2 (6)to deal with the complexity and the non-Gaussian behavior of the distribution, where N denotes the number of training samples and the function d is a distance measure in E.This estimate depends on the window sizeσthat is necessary to be chosen in an appropriate way.While a small value ofσforces the particles to stick to the training data,a greater value ofσapproximates the density smoother. In order to cope with this,we choseσas the maximum second nearest neighbor distance between all training samples,i.e.the two neighbors of a sample are at least within a standard deviation.Other values for the window size are discussed in detail in[15].Fig.2.The Parzen estimate subject to the angles of the knee joints.Left:Using the Euclidean distance leads to a domination of the knee joints.The density rapidly declines to zero as the values differ from the data.Right:The influence of the knees is reduced by the weighted Euclidean distance.We have not yet specified the norm for evaluating the distance between a training sample x i and a value x in the d-dimensional state space E for Equa-tion(6).The commonly used Euclidean distance weights all dimensions of the6Juergen Gall,Bodo Rosenhahn,Thomas Brox,and Hans-Peter Seidelstate space uniformly.This means in the context of human motion estimation that a discrepancy of the knee contributes to the measured distance in the same matter as a discrepancy of the ankle.As illustrated in Figure2,this involves a dominated measure by joints with a relatively large anatomical range as the knee in comparison to joints with a small range as the ankle.Therefore,we propose using a weighted Euclidean distance measure that incorporates the variance of the various joints,i.e.d(x,x i):=ρk,ρk:= N i=1(x i)k−N−1(7)whereLecture Notes in Computer Science7 4Application to Multi-View3D Tracking4.1Feature extractionFor weighting the particles during the update step of the APF,features from an image y t have to be extracted.In previous works,only low-level features assuming a static background as foreground silhouette,edges,or motion bound-aries[3,6]were considered.In our work,the level set based image segmentation from Section2.2with the experimentally determined parameterν=4is applied using the estimated pose x t−1from the previous time step.The resulting level set describes the silhouette and the contour of the observed object.We remark that the extraction of this image feature is not independent of the estimate any-more.This yields a weighting function that depends not only on the current image and the particle itself,but also on the whole set of particles defining the estimate.Even though particlefilters already provide an interaction between the particles due to the normalization of the weights,it holds the danger that a segmentation error leads to an estimate error and vice-versa.However,the influence of the estimate on the segmentation can be regulated by the parameter λ.Our experiments,where we setλ=0.04,show indeed that a proper value for this parameter avoids this problem.4.2Weighting FunctionThe error between a particle and the observed image y is calculated pixel-wise similar to[3].Each particle x∈E determines a pose of our3D model.The projected surface of the model into the image plane gives a set of silhouette points S S i(x)and a set of contour points S C i(x)for each view i=1,...,r,where a set contains all pixels p∈R2of the silhouette and the contour,respectively. The silhouette S y i of the observed object is obtained from the level set function Φi,where S y i(p)=1ifΦi(p)>0and S y i(p)=0,otherwise.The contour C y i is just the boundary of the silhouette smoothed by a Gaussianfilter and normalized between0and1,cf.Figure3.Then the error functions are defined by1err L(x,y,i):=8Juergen Gall,Bodo Rosenhahn,Thomas Brox,and Hans-Peter Seidelcanceled out when normalizing the weights.Note that the prior knowledge is embedded in accordance with the Bayesian framework by multiplying the old weighting function with (p pose )η.Our method performs well with η∈[0.06,0.1]as we demonstratebelow.Fig.4.Left:Results for a walking sequence captured by four cameras.Right:The joint angles of the right and left knee.Solid (thin):Marker based system.Solid (thick):Prior with weighted distance.Dashed:Without prior (Tracking fails).5ExperimentsIn our experiments we track the lower part of a human body using four cali-brated and synchronized cameras.The sequences are simultaneously captured by a commercial marker based system 3allowing a quantitative error analysis.The black leg suit and the attached retroflective markers are required by the marker based system,see Figure 3.The training data used for learning p pose consists of 480samples obtained from walking sequences of the same person.The data was captured by the com-mercial system before recording the test sequences.The parameters of the APF are set during the experiments as follows:10annealing runs are applied with βm =8(1−1.6m −11)and 250particles.The resampling step includes a crossover operator [3],and the particles are diffused according to a zero-mean Gaussian distribution with covariance matrix determined by 0.1ρk ,see (7).The initial distribution is the Dirac measure of the initial pose.Our implementation took several minutes for processing 4images of one frame.Figure 4visualizes results of a walking sequence that is not contained in the training data.For the sake of comparison,the results of the APF without using prior knowledge at all are also visualized in Figure 5.The estimated angles of the left and the right knee are shown in the diagram in Figure 4where the values acquired from the marker based system provide a ground truth with anLecture Notes in Computer Science 9Fig.5.Visual comparison of results.From left to right:(a )Without prior.(b )With-out weighted distance.(c )With weighted distance.accuracy of about 3degrees.It allows to analyze the quantitative error of our method in contrast to previous works,e.g.[3],where visual comparisons indicate roughly the accuracy of the pose estimates.The root mean square (RMS)error for both knees is 6.2degrees (red line).While tracking with 100particles failed,our method also succeeded using 150and 200particles with RMS errors 15.3and 8.8degrees,respectively.Fig.6.Results for distorted sequences (4of 181frames).Only one camera view is shown.Top:Occlusions by 30random rectangles.Bottom:25%pixel noise.Figure 6shows the robustness in the presence of noise and occlusions.Each frame has been independently distorted by 25%pixel noise and by occluding rectangles of random size,position and gray value.The legs are tracked over the whole sequence with RMS errors 8.2and 9.0degrees,respectively.Finally,we applied the method to a sequence with scissor jumps,see Figure 7.This demonstrates that our approach is not restricted to the motion patterns that were used for training as it is when learning the patterns instead of the poses.However,the 7th image also highlights the limitations of the prior.Since our training data are walking sequences,the probability that both knees are bended is almost zero,cf.Figure 2.Therefore a more probable pose is selected with less10Juergen Gall,Bodo Rosenhahn,Thomas Brox,and Hans-Peter Seidel bended knees.It yields a higher hip of the3D model than in the image.Overall, the RMS error is8.4degrees.A similar error can be observed for the feet since they are more bended for jumping as for walking.Nevertheless,the result is much better than without using any prior.Fig.7.Rows1-2:Results for a sequence with scissor jumps(8of141frames).Row3: The3D models for the4poses on the left hand side of rows1and2are shown from a different viewpoint.6SummaryWe have presented a method that integrates a-priori knowledge about the dis-tribution of pose configurations into the general model of particlefilters as well as into the special APF scheme.Thereby,the prior ensures that particles rep-resenting a familiar pose are favored.Since only single pose configurations and not whole motion patterns are learned,a relatively small set of training samples is sufficient for capturing a variety of movements.Our experiments provide a quantitative error analysis that clearly demonstrates the increased accuracy of the APF due to the incorporated prior knowledge.Moreover,we have shown that our approach combined with a variational model for level set based image segmentation is able to deal with distorted images,a case where common tech-niques that rely on background substraction fail.Since we were restricted to use artificial distortions by the marker-based system,further work will be done to evaluate the system in real examples like crowded and outdoor scenes.Work on acquiring training data from motion databases and handling occlusions by clothes is also in progress.Lecture Notes in Computer Science11 References1.Doucet,A.,de Freitas,N.,Gordon,N.,eds.:Sequential Monte Carlo Methods inPractice.Statistics for Engineering and Information Science.Springer,New York (2001)2.Isard,M.,Blake,A.:Condensation-conditional density propagation for visualtracking.Int.J.of Computer Vision29(1998)5–283.Deutscher,J.,Reid,I.:Articulated body motion capture by stochastic search.Int.J.of Computer Vision61(2005)185–2054.Sidenbladh,H.,Black,M.,Fleet,D.:Stochastic tracking of3d humanfigures using2d image motion.In:European Conf.on Computer Vision.Volume2.(2000)702–7185.Sidenbladh,H.,Black,M.,Sigal,L.:Implicit probabilistic models of human motionfor synthesis and tracking.In:European Conf.on Computer Vision.Volume1.(2002)784–8006.Sminchisescu,C.,Triggs,B.:Estimating articulated human motion with covariancescaled sampling.Int.J.of Robotics Research22(2003)371–3917.Sminchisescu,C.,Jepson,A.:Generative modeling for continuous non-linearilyembedded visual inference.In:Int.Conf.on Machine Learning.(2004)8.Brox,T.,Rosenhahn,B.,Kersting,U.,Cremers,D.:Nonparametric density estima-tion for human pose tracking.In:Pattern Recognition(DAGM).LNCS,Springer (2006)To appear.9.Brox,T.,Rousson,M.,Deriche,R.,Weickert,J.:Unsupervised segmentation in-corporating colour,texture,and motion.In Petkov,N.,Westenberg,M.A.,eds.: Computer Analysis of Images and Patterns.Volume2756of LNCS.,Springer(2003) 353–36010.Rosenhahn,B.,Brox,T.,Smith,D.,Gurney,J.,Klette,R.:A system for marker-less human motion estimation.K¨u nstliche Intelligenz1(2006)45–5111.Crisan,D.,Doucet,A.:A survey of convergence results on particlefiltering methodsfor practitioners.IEEE Transaction on Signal Processing50(2002)736–746 12.Kirkpatrick,S.,Gelatt,C.,Vecchi,M.:Optimization by simulated annealing.Science220(1983)671–68013.Brox,T.,Rosenhahn,B.,Weickert,J.:Three-dimensional shape knowledge forjoint image segmentation and pose estimation.In Kropatsch,W.,Sablatnig,R., Hanbury,A.,eds.:Pattern Recognition(DAGM).Volume3663of LNCS.,Springer (2005)109–11614.Parzen,E.:On estimation of a probability density function and mode.Annals ofMathematical Statistics33(1962)1065–107615.Silverman,B.:Density Estimation for Statistics and Data Analysis.Chapman andHall,London(1986)16.Mukundan,R.,Ramakrishnan,K.:Moment Functions in Image Analysis:Theoryand Application.World Scientific Publishing(1998)。