第3章指令与编程2
第3章PLC的基本指令及程序设计
✓ 计数器当前值:其值是一个存储单元,它用来存储计数器当前所累 计的脉冲个数,用16位符号整数来表示,最大数值为32 767。
计数器输入端和操作数 ✓ 设定值输入:数据类型为INT型。 ✓ 寻址范围:VW、IW、QW、MW、SW、SMW、LW、AIW、T、C、 AC、*VD、*AC、*LD和常数。 ✓ 一般情况下使用常数作为计数器的设定值。
LPS(Logic Push) 逻辑入栈指令(分支电路开始指令)
LRD(Logic Read) 逻辑读栈指令
LPP(Logic Pop) 逻辑出栈指令(分支电路结束指令)
LPS/LRD/LPP
LPS/LRD/LPP举例 例3
指令3 与ENO指令AENO ENO是LAD中指令盒的布尔能量流出端。该指令使用较少。
举例
1. 逻辑堆栈操作指令
堆栈 堆栈是一组能够存储和取出数据的暂存单元。 遵循“先进后出”的原则。 堆栈深度为“9层”。 可以存储最新的逻辑运算(中间)结果,以便后续逻辑环节使用该结果。 逻辑堆栈操作主要来完成触电复杂逻辑连接的编程。
指令1 OLD(或块指令) ALD (与块指令)
OLD(Or Load)
定时器的指令及使用 指令
定时器的指令及使用
接通延时定时器TON(On-Delay Timer) ✓ 接通延时定时器用于单一时间间隔的定时。 ✓ 上电周期或首次扫描时,定时器位为OFF,当前值为0。 ✓ 输入端接通时,定时器位为OFF,当前值从0开始计时,当前值达 到设定值时,定时器位为ON,当前值仍连续计数到32 767。 ✓ 输入端断开,定时器自动复位,即定时器位为OFF,当前值为0。
微机原理与接口技术第3章(指令部分)
例:编程计算 0+1+2+3+4+ -----10 编程计算
MOV AL,0 , MOV BL,1 , MOV CL,10 NEXT:ADD AL,BL , INC BL DEC CL JNZ NEXT ;CL≠0 转 ≠ HLT
1
3.1 概述 一、指令包含的基本内容
12
(3)相对寻址
例: MOV AX, [SI+100H]
;结果 : 结果 AX (DS×16+SI+100H) ×
例:MOV AL,[BP+DATA] MOV AL, DATA[BP] ; DATA是符号表示的位移量。 表示的位移量 是符号表示的位移量。
结果 : AL (SS×16+BP+DATA) ×
11
(2)间接寻址 例:MOV AX,[BX] , •结果 : AX 结果 (DS×16+BX) ×
...
3000H:0000H : • EA= BX /SI /DI , 物理地址=DS*16+EA 物理地址 • EA= BP 物理地址=SS*16+EA 物理地址 :1234H :50H :1235H :30H
1. 做什么操作? 做什么操作? MOV ,ADD, OR,CMP等助记符 等助记符
2. 操作的数据是什么? ①CPU内的寄存器; 操作的数据是什么? 内的寄存器 内的寄存器; 内存的某一个或几个单元 单元; ②内存的某一个或几个单元; 结果放在那里? 3. 结果放在那里? 立即数。 ③立即数。 端口; 端口 ④I/O端口; 下一条指令在哪里? 4. 下一条指令在哪里? IP←IP+1
第3章 51单片机指令系统
3.1.3 堆栈操作指令
(1)入栈指令:
PUSH direct; SP ← SP+1, (SP) ← (direct)
入栈操作:栈指针SP+1指向栈顶的上 一个空单元,将直接地址direct寻址的单元 内容压入当前SP所指示的堆栈单元中。 (本操作不影响标志位)
例3-3 在中断响应时,SP=09H,数据 指针DPTR的内容为0123H。执行下列指令 后:
MOV @Ri , A ; (Ri)←A MOV @Ri , direct ; (Ri)←(direct) MOV @Ri , data ; (Ri)←#data 上述指令将累加器A,直接地址单元内 容或立即数送到Ri间接寻址单元中。由于内 容较多,下面需要说明:
累加器A是个使用最多的寄存器,MCS-51单 片机以A为中心体系结构。绝大部分指令均需通 过A送到ALU进行运算,结果存于A中,有些指令 仅在A中进行。 直接地址direct ,8位直接地址可寻址0~255个 单元。对于8051则直接寻址内部RAM0~127地址 空间的单元及128~255地址空间的特殊功能寄存 器。这里需注意128~255地址空间很多单元开始 时无定义,对无定义单元进行读/写,则读数不定, 欲写入的数将丢失。 间接寻址@Ri,@间接寻址的符号,是以Ri 的内容作为地址进行寻址,亦即Ri的内容不是操 作数,而是地址。此地址所对应的单元内容才是 所要找的操作数。间接寻址的寻址范围与直接寻 址相同(0~255)。直接寻址单元在编程时就已 明确,而间接寻址单元是在程序运行中明确。
3.PLC应用技术(三菱机型)教学课件 第3章基本指令

类别 输入 输出
表3-2电动机的基本控制资源分配表
名称
I/O地址
功能(可变)
SB1
X0
正转按钮
SB2
XI
反转按钮
SB3
X2
停止按钮
SQ1
X4
左限位行程幵关
1.指令集
指令的学习及应用要注意三个方面的问题。 其一是指令的表迖形式,每条指令都有梯形图与指令表 两种表迖形式,也就是说每条指令都有图形符号和文字 符号,这是使用者要记住的。 其二是每条指令都有各自的使用要素。如定时器是用来 计时的,计时自然离不幵计时的起点及计时时间的长短 ,指令中一定要表现这两个方面的内容,这也就是指令 的要素。 其三是指令的功能,一条指令执行过后,机内哪些数据 出现了哪些变化是编程者特别要把握的,分析不透,就 难以熟练编写分析调试程序,达到控制目的。
I/O 总 点 数 : 即 输 入 点 数 与 输 出 点 数 之 和 , 三 菱 PLC 的 输 入 点数和输出点数相等。 单元类型:M—该模块为基本单元(CPU模块);E—输入 、输出混合扩展单元或扩展模块;
输 出 形 式 : R_ 继 电 器 输 出 ; S — 双 向 晶 闸 管 输 出 ; T 一 晶 体 管输出。 特殊品种区别:D—直流电源,直流输入;A—交流电源, 交流输入或交流输入模块。
指令将前面的运算结果上升(下降)沿时输出脉冲,不能
2.基本指令
八、主控触点(MC、MCR)指令
MC (MasterControl):主控指令,用于公共串联触点连接 ,占3个程序步。 MCR (MC Reset):主控复位指令,用于公共串联触点的 清除,是MC指令的复位指令,占2个程序步。 使用主控指令的触点称为主控触点,它们在梯形图中与一 般的触点垂直,是与左母线直接相连的动合触点,其作用 相当于控制一组电路的总开关。 在MC指令内采用MC指令时,嵌套N级的编号按顺序增大( N0-N7)。将该指令返回时,采用MCR指令,从大的嵌套 级开始消除(N0-N7)。嵌套级最大可编8级,特殊辅助继 电器不能用做MC的操作元件。
第三章PLC指令系统2
DW和 SHR DW,其他部分完全相同。最大实际可移位次 数为32。 指令格式: SLD SRD 例: SLD SRD OUT, N (双字左移) OUT, N (双字右移) MD0, 2 LD0, 3
2.
循环左移、循环右移
循环移位特点: 移位数据存储单元的移出端与另一端相连,同时又与 SM1.1 (溢出) 相连,所以最后被移出的位被移到另一端的同时,也被放到SM1.1位存 储单元。 移位次数与移位数据的长度有关,如果移位次数设定值大于移位数据 的位数,则执行循环移位之前,系统先对设定值取以数据长度为底的 模,用小于数据长度的结果作为实际循环移位的次数。如字左移时, 若移位次数设定为36,则先对36取以16为底的模,得到小于16的结果4, 故指令实际循环移位4次。 如果移位操作使数据变为0,则零存储器位(SM1.0)自动置位。 移位指令影响的特殊存储器位:SM1.0(零);SM1.1(溢出)。 使能流输出 ENO 断开的出错条件: SM4.3 (运行时间); 0006 (间接 寻址)。 移位次数N为字节型数据。
循环右移指令:
移位指令 (2)字循环左移和字循环右移指令:RLW,RRW
指令盒与字节循环移位只有名称变为 ROL
W和 ROR W ,其他部分完全相同。使能输入有效时, 把字型输入数据IN循环左移或循环右移N位后,再 将结果输出到 OUT 所指的字存储单元(在语句表 中, IN 与 OUT 使用同一个单元)。实际移位次数 为设定值取以16为底的模所得的结果。 指令格式: RLW OUT, N (字循环左移) RRW OUT, N (字循环右移) 例: RLW MD0, 2 RRW LD0, 3
SHRB EN ENO ENO DAT A S_BIT I0.1 正跳变 I0.2 S_BIT 0 1 0 0 1 0 0 0 1 1 溢出位 1
施耐德PLCTwidoPLC可编程控制器第三章、编程语言和编程软件TWIDOSOFT
第三章、编程语言和编程软件TWIDOSOFT3-1 Twido编程语言介绍3-2 编程软件TWIDOSOFT的用法介绍3-1 Twido编程语言介绍TWIDO提供了梯形图,指令列表和Grafcet等编程语言给用户使用。
3-1-1、梯形图语言介绍3-1-1-1梯形图类似于用来描述继电器电路的继电器逻辑图。
两者之间的主要区别是继电器逻辑图没有梯形图下面的特点:所有的输入都由触点符号表示。
所有的输出都由线圈符号表示。
梯形图指令中包括数字运算。
继电器等效梯形图下面图例是一个继电器逻辑电路的简化接线图和他的等效梯形图。
请注意上面图例中,梯形图中所有与继电器逻辑图中开关设备相关的输入都以触点形式表示。
继电器逻辑图中的M1输出线圈在梯形图中用输出线圈符号表示。
梯形图中每个触点/线圈符号上的地址标号都对应于与控制器相连的外部输入/输出的位置。
3-1-1-2梯级用梯形图编写的程序由梯级构成,梯级是指画在两条垂直电压栏里的图形指令集。
梯级由控制器顺序执行。
图形指令集表述下述功能:控制器的输入/输出(按钮,传感器,继电器,指示灯,等等)控制器的功能(定时器,计数器,等等)数学和逻辑运算(加法,除法,与,或,等等)比较运算和其它数字运算(A<B, A=B, 移位,循环,等等)控制器的内部变量(位,字,等等)垂直和水平连接这些图形指令最终实现一个或多个输出和/或动作。
一个梯级只能支持一组相关指令。
下图是一个由两个梯级组成的梯形图程序示例。
3-1-1-3梯形图编程原则编程网格每个梯级由7行11列组成,形成两个区域,如下图所示。
网格区域梯形图编程网格分为两个区:测试区包括动作发生所必须具备的条件。
由列1-10组成,包括触点,功能模块,和比较模块组成。
动作区包括测试区相关测试条件所引起的输出或操作。
由列8-11组成并包括线圈和操作模块。
网格中指令输入梯级提供了一个7行11列的编程网格,并从网格的最左上方单元开始。
编程即向网格中的单元输入指令。
第3章_MCS-51单片机指令系统及汇编语言程序设计2
3. 汇编语言的语句格式是什么?使用标号有什么限制?注释段起什么作用? 答案: MCS-51汇编语言的语句格式应符合下列结构: 【标号:】 操作码 【操作数】【;注释】 标号位于语句的开始,由以字母开头的字母和数字组成,它代表该语句的地址。 标号与操作码之间要用“:”隔开,标号与“:”之间不能有空格,“:”与操 作码之间可以有空格。 注释在语句的最后,以“;”开始,是说明性的文字,与语句的具体功能无关。 4. MCS-51汇编语言有哪几条常用伪指令?各起什么作用? 答案: ORG:汇编程序起始地址,用来说明其后程序段在存储器中存放的起始地址; EQU:赋值指令,用来给变量标号赋予一个确定的数值; DB:定义数据字节,指令按字节数的形式把数据存放在存储单元中; DW:定义数据字,按字(双字节)的形式把数据存放在存储单元中; DS:定义存储区,从指定的地址单元开始,保留一定数量的存储单元; BIT:位定义,其功能是把位地址赋给字符名称; END:汇编结束,表明汇编语言程序结束。
2.顺序程序
顺序程序是指程序中没有使用转移类指令的程序段,机器执行这 类程序时也只需按照先后顺序依次执行,中间不会有任何分支、循环, 也不需要调用子程序。 例:将一个单字节十六进制数转换成BCD码。 解:算法分析。单字节十六进制数在0~255之间,将其除以100后, 商为百位数;余数除以10,商为十位数,余数为个位数。 设单字节数存放在40H,转换后,百位数存放在R0中,十位数存 放在R1中,个位数存放在R2中,具体程序如下: ORG 0030H MOV A, 40H ;将单字节十六进制数送入A中 MOV B,#64H ;将100送入B中, #64H可直接写成#100 DIV AB MOV R0,A ;百位数送R0,余数在B中 XCH A,B ;余数送入A中 MOV B,#0AH ;将10送入B中, #0AH可直接写成#10 DIV AB ;商为十位数,余数为个位数 MOV R1,A MOV R2,B SJMP $
plc课件 plc-3 第三章 s7-300plc的编程基础及指令系统

2021/7/13
19
7、数据块DB
(1)共享数据块(Shared DB)
共享数据块为系统或用户自定义的数据结构(与 C语言中的结构类似),可供所有逻辑块使用。名 称为DBn,n为编号(一般为1~2047,具体可定义 的个数,视CPU型号而定),其属性Shared 。在 DB中可定义各种类型的数据变量,且可对变量赋初 值。支持DB绝对地址访问及变量形式访问。
本地数据
13
二、S7-300系列PLC的寻址(地址分配)
1、基于槽位的寻址
基于槽位的寻址为默认设置。
机架号为0~3,0号机架为CPU机架,其余 为扩展机架。
CPU机架上的槽号为1~11,槽号1放置电源 模块(PS),槽号2放置CPU模块(CPU), 槽号3放置接口模块(IM),槽号4~11放置其 它模块(SM、FM、CP)
依CPU型号,存储器大小为128~2048B不等, 支持位寻址、字节寻址、字寻址和双字寻址。
位 存 储 区 以 M 标 识 , 如 : M0.0 、 MB0 、 MW0、MD0 (字地址为偶数地址0、2、4…, 双字地址为0、4、8…)等。
6、定时、计数器存储区寻址
依CPU型号不同,可有64~256个定时器, 32~256个计数器。定时器标识符为T,计数器 标识符为C。如:T0,C0等。
2021ቤተ መጻሕፍቲ ባይዱ7/13
9
第6位和第7位(CC0、CC1):条件码0和条件 码1。两位结合用于表示算术运算或逻辑运算的结 果与0的大小关系,以及比较指令的执行结果或移 位指令的移出状态。
第8位(BR):二进制结果位。用于表示字操作 的结果是否正确。1—正确,0 — 错误。
3. 地址寄存器(AR1和AR2)
微机原理第3章指令

第3章指令系统机器指令:能指示计算机完成基本操作的二进制代码指令系统:CPU可执行的机器指令的集合。
为了方便编程,人们又把完成特定操作的机器码用特定的符号表示,这就产生了符号表示的机器指令-------指令助记符。
第3章8086指令系统机器指令由二进制代码组成,一条指令包括操作码和操作数(或地址)两部分,操作码指明该指令进行何种操作,操作数用来说明操作对象。
个别指只有操作码没有操作数。
由于不同的指令所表达的信息不尽相同,因此指令的长度即机器码字节数也有长有短。
8086指令系统的指令是可变长指令(1~6个字节)3.18086CPU寻址方式重点是存储器寻址存放在存储器中的数据称为存储器操作数。
指令中需要确定存储单元的段地址、偏移地址(亦称有效地址EA),以及存储器操作数的类型。
段地址存放在段寄存器中,确定段地址实际上就是确定段寄存器,采用的方法是默认或添加段超越前缀。
生成存储器有效地址有多种方法,这些方法形成了对存储器操作数的多种寻址形式。
确定数据类型的方法是源操作数和目的操作数类型一致原则或附加类型说明。
立即寻址方式中操作数也在存储器中,但立即寻址中的立即数包含在指令中,随程序存放在代码段,CPU在取指令时就获得操作数。
这里所说的存储器操作数是存放在数据段、附加段或堆栈段中,取指令时也不会被立即取到。
段超越前缀变量的定义在第四章详细介绍直接寻址:MOV AX,[2000H];寄存器间接寻址:MOV ES:[DI],AH基址寻址:MOV BYTE PTR[BX+1200H],10变址寻址:MOV DL,[SI+2AH]基址加变址寻址:MOV CL,[BX+SI+5]MOV AX,[BP+DI]MOV CL,[BX+SI+5]的等价形式:MOV CL,5[BX][SI]、MOV CL,5[BX+SI]、MOV CL,[BX][SI+5]MOV CL,[BX+SI-5]等价于MOV CL,[BX+SI+65531] MOV CL,[BX-SI]MOV CL,[SI+DI]错误!MOV[BX+DI],1000H正确吗?3.2.1数据传送类指令传送指令把数据从一个位置传送到另一个位置使用MOV指令应注意1.立即数只能作为源操作数2.无存储器之间直接传送与交换的指令3.没有用立即数对段寄存器直接赋值的指令4.段寄存器之间无传送指令5.两个操作数的类型要一致6.要能确定是字节还是字操作mov ah,al mov bvar,ch mov ax,bx mov ds,ax mov al,[bx]下列MOV指令正确吗?MOV AL,050AHMOV SI,DLMOV[BX+SI],255MOV DS,100HMOV[BX],[SI]MOV[BX+SI],bvarbvar是一个已定义过的字节变量 MOV CS,[SI]将数据段中偏移地址为2000H、2001H、2002H的3个字节的存储单元置数FFH。
第3章PLC基本指令

PLC原理及应用
机电学院
3.1 基本编程指令 3.1.1 位逻辑指令 一、 触点指令与堆栈指令
第三章 PLC基本指令
二、 计数器指令 1.加计数器(CTU) 同时满足下列条件时,加计数器的当前值加1,直至计数最大值32767。 1)复位输入电路断开。 2)加计数脉冲输入电路由断开变为接通(CU信号的上升沿)。 3)当前值小于最大值32767。 当前值大于等于预设值 PV时,计数器位为ON,反之为OFF。当复位输入 R 为 ON 或对计数器执行复位( R )指令时,计数器被复位,计数器位变为 OFF,当前值被清零。在首次扫描时,所有的计数器位被复位为OFF。
指出图3-38中的错误。
3.2 程序控制指令 3.2.1 跳转指令
1.跳转与标号指令 JMP线圈通电时,跳转条件满足,跳转指令使程序流程跳转到对应的标号 处。JMP与LBL指令的操作数 n为常数0~255,只能在同一个程序块中跳转。 I0.4的常开触点断开时,跳转条件不满足,顺序执行下面的网络。 I0.4的常开触点接通时,跳转到标号LBL 0处,不执行第二个网络。
3.2.4 局部变量与子程序
一、 局部变量 1.局部变量与全局变量 每个程序组织单元(POU)均有由64字节局部(L)存储器组成的局部变 量。局部变量只在它被创建的POU中有效,全局符号在各POU中均有效。局 部变量有以下优点: 1) 尽量使用局部变量的子程序易于移植到别的项目。 2) 同一级POU的局部变量使用公用的存储区。 3)局部变量用来在子程序和调用它的程序之间传递输入参数和输出参数。 2.查看局部变量表 可上下拖动分裂条,打开和关闭局部变量表。 3.局部变量的类型 临时变量(TEMP)是暂时保存在局部数据区中的变量。主程序或中断程序 只有TEMP变量。
第3章 MCS-51单片机指令系统

(1)内部数据存储器的低128个字节单元 (00H~7FH)。例: MOV A, 40H ,表示把内 部RAM 40H单元的内容传送给A。 假设40H单元中的内容为2BH,结果是将直接地 址40H单元中的数据2BH传送到累加器A中。
第三章 MCS-51单片机指令系统
3.2.2 直接寻址
(2)特殊功能寄存器。 特殊功能寄存器只能用直接寻址方式进行访问。 对于特殊功能寄存器,在助记符指令中可以直接 用符号来代替地址。例: MOV A, P0 ,表示把 P0口(地址为80H)的内容传送给A。
3.3.1 内部数据存储器传送指令
1.立即数传送指令
MOV A,#data ;A←data MOV Rn,#data ;Rn←data,n=0~7 MOV direct,#data ;direct←data MOV @Ri,#data ;(Ri)←data,i=0,1 MOV DPTR,#data16 ;DPTR←data16 前四条指令将8位立即数传送到指定的存储单元中。 最后一条指令将16位立即数传送到数据指针 DPTR中,其中高8位送入DPH,低8位送入DPL。
(3)三字节指令 编码格式为:
例如数据传送指令MOV 20H,#3AH的编码格式为:
3.2 寻址方式
第三章 MCS-51单片机指令系统
所谓寻址,就是寻找操作数的真正地址,寻址方 式,就是指寻找操作数地址的方式。
在用汇编语言编程时,数据的存放、传送、运算 都要通过指令来完成。 编程者必须自始至终都要 十分清楚操作数的位置, 以及如何将它们传送到适 当的寄存器去参与运算。每一种计算机都具有多 种寻址方式。寻址方式的多少是反映指令系统优 劣的主要指标之一。
2. 汇编语言
汇编语言就是用助记符表示的指令,汇编语言与 机器语言一一对应。用汇编语言编写程序,每条 指令的意义一目了然,给程序的编写、阅读和修 改带来很大方便。而且用汇编语言编写的程序占 用内存少,执行速度快,尤其适用于实时应用场 合的程序设计。因此,在单片机应用系统中主要 是用汇编语言来编写程序。 汇编语言的缺点:缺乏通用性,程序不易移植, 是一种面向机器的低级语言。使用汇编语言编写 程序时,必须熟悉机器的指令系统、寻址方式、 寄存器的设置和使用方法。每种计算机系统都有 它自己的汇编语言。不同计算机的汇编语言之间 不能通用。
何献忠版PLC应用技术(第二版)课后习题答案

第一章PLC应用前提之阳早格格创做1-1 简述交战器、继电器各有什么个性?其主要辨别是什么?交战器是利用电磁力的效率使主触面接通或者断开电效果或者其余背载主电路的统制电器.交战器具备比处事电流大数倍的接通本领战分断本领,不妨真止一再的近距离支配.交战器最主要的用途是统制电效果的开用、正反转、制动战调速等.继电器是一种根据特定形式的输进旗号的变更而动做的自动统制器.它与交战器分歧,主要用于反映统制旗号,其触面常常接正在统制电路中.1-2 接流电磁线圈中通进曲流电会爆收什么局里?接流电磁线圈的个性是匝数少、电阻小,靠感抗节制线圈电流,通进曲流电后果感抗为整,将会制成线圈电流过大而废弃.1-3 曲流电磁线圈中通进接流电会爆收什么局里?曲流电磁线圈的个性是匝数多、电阻大,靠电阻限流,而铁心由整块工程杂铁制成,那样通进接流电后,将正在铁心中爆收较大的磁滞战涡流耗费,间接制成线圈过热而废弃. 1-4戴有接流电磁机构的交战器,线圈通电后衔铁被卡住,会爆收什么局里?为什么?根据接流电磁机构的个性可知,接流电磁铁的线圈电流I与处事气隙δ成反比,如果线圈通电后衔铁被卡住,处事气隙δ背去很大,果此电磁线圈的电流I也背去很大,电磁线圈将被废弃.1-5 戴有曲流电磁机构的交战器是可允许一再支配?为什么?戴有曲流电磁机构的交战器适于一再支配,根据曲流电磁机构吸力个性可知,曲流电磁机构线圈的电流I与处事气隙δ无关,果此线圈电流I的大小不受衔铁状态的效率,所以戴有曲流电磁机构的交战器一再支配时,不会制成线圈过热.1-6 接流电磁铁的铁心端里上为什么要拆置短路环?根据接流电磁机构的吸力个性可知,电磁吸力F随时间周期变更,且每周期有二次过整面,也便是道F有二次小于板滞背载反力Fr ,衔铁有二次“拍合”铁心的局里,引起电磁噪声,果此正在铁心端里的2/3处拆置短路环,进而爆收出进一个相位的二个磁通Φ1战Φ2,Φ1战Φ2分别爆收二个分力F1战F2,其合力F= F1+F2总大于反力,那样便与消了电磁噪声.1-7 接流交战器是可串联使用?为什么?接流交战器不克不迭串联使用,既使中加电压是二个线圈额定电压之战,也是不允许的.果为每个线圈上所调配到的电压与线圈阻抗成正比,而二个电器的动做经常有先有后,不可能共时吸合.假若一个交战器先吸合,则其磁路关合,线圈电感隐著减少,果而正在该线圈上的电压落也相映删大,使另一个交战器的线圈电压达不到动做电压,进而使处事气隙δ背去很大,由于接流电磁铁的线圈电流I与处事气隙δ成反比,将制成线圈过热而废弃.1-8 曲流电磁式时间继电器的延时本理是何如?怎么样整定延时范畴?曲流电磁式时间继电器断电延时本理是利用楞次定律,要领有二种:1、阻僧铜套法:当线圈通电时,衔铁处于释搁位子,气隙大,磁阻大,磁通小,所以阻僧铜套的效率很小,可不计延时效率,而线圈断电时,由于电流瞬间减小,根据楞次定律阻僧铜套中将爆收一个感触电流,阻拦磁通的变更,保护衔铁不坐时释搁,曲至磁通通过阻僧铜套电阻消耗渐渐使电磁吸力缺累以克服反力时,衔铁释搁,进而爆收了断电延时.2、短接线圈法:当电磁线圈断电时,坐时把线圈短接,根据楞次定律线圈中将爆收一个阻拦磁通变更的感触电流,保护衔铁不坐时释搁,进而爆收断电延时.延时范畴的安排:(1)改变释搁弹簧的紧紧度:释搁弹簧越紧,释搁磁通越大,延时越短.(2)改变非磁性垫片薄度:垫片薄度减少,延时减少.(3)为删大断电延时,对付戴阻僧套的时间继电器可兼用短接线圈法.1-9 接流电压继电器与曲流电压继电器正在结构上有什么分歧?二者均为电压线圈,但是有接流战曲流之分.接流电压线圈的个性是匝数少、电阻小,靠感抗节制线圈电流,铁心由硅钢片叠铆而成;曲流电压线圈的个性是匝数多、电阻大,靠电阻限流,铁心由整块工程杂铁制成.1-10 曲流电压继电器与曲流电流继电器正在结构上有什么分歧?曲流电压继电器的线圈是电流线圈,它与背载串联以反映背载电流的变更,故它的线圈匝数少而导线细;曲流电压继电器的线圈是电压线圈,导线细、电阻大、与背载并联以反映电路电压的变更.1-11 Y形接法的三相同步电效果是可采与二相结构的热继电器动做断相战过载呵护?△接法的三相同步电效果为什么要采与戴有断相呵护的热继电器?电效果为Y接时,若任一相爆收断相,其余二相电流删大,由于线电流等于相电流,流过绕组的电流与流过热元件的电流减少比率相共,果此采与一般二相式热继电器既可真止断相呵护;若供电线路宽沉不平衡或者电效果绕组里里爆收短路或者绝缘不良等障碍时,便大概使绕组某一相电流比其余二相下,若恰佳正在那一相中不热元件,则不克不迭起到呵护效率.此时须采与三相结构的热继电器.电效果为△接时,若爆收断相障碍,流过绕组的电流与流过热元件的电流不相共,而热继电器按线电流整定,整定值比绕组相电流大,果此障碍线电流达到动做值往日,绕组电流便已超出额定电流,使绕组过热废弃.果此必须采与戴断相呵护的热继电器.1-12试安排不妨从二天统制一台电效果,能真止面动处事战连绝运止处事的统制线路.1-13正在不时间继电器的情况下,安排一个用按钮战交战器统制电效果串电阻落压开用的统制线路.1-14试安排一统制线路,央供:按下按钮后,KM1通电,经10s后,KM2通电,经5s后,KM2释搁,共时KM3通电,再经15s,KM1、KM3共时释搁,正在所有时刻,按停止按钮线路停止处事.1-15试安排一绕线式同步电效果的统制线路,央供:①用按钮真止单目标运止;②准时间准则串电阻三级开用.1-16图1-65所示TPH31系列滑环式同步电效果通用屏能真止几级调速?线路有哪些呵护?分别是哪些元件真止的?当主令统制器的脚柄正在第二位时,有哪些线圈通电?问:TPH31系列滑环式同步电效果通用屏能真止三级调速;有4种呵护:短路呵护(QF、QF1)、过载呵护(KA1、KA2、KA3)、得压呵护(KV、KM1、KM2、KM3)、整位呵护(KV、SA);当主令统制器的脚柄正在第二位时,线圈KV、KM1、KM2、KB、YB、KA1、KA2、KA3通电.1-17试安排一小车运止的统制线路,小车由同步电效果拖动,其动做历程如下:(1)小车由本位开初前进,到末面自动停止.(2)小车正在末面停顿2min后自动返回本位停止.(3)央供能正在前进或者退却途中任性位子开用战停止. 1-18安排预警开用线路,央供:按下开用按钮后,电铃响,10s后KM开用再过10s后电铃停.1-19二台电机连锁开停统制线路,央供:M1开用后,M2才开用;M2停止后,M1才停止.1-20安排闪光电源统制线路,央供:线路爆收障碍(KA关)时,旗号灯HL明2s,灭1s,周而复初,曲到按下排除按钮.第二章PLC的结媾战个性2.1 PLC处事历程分为几个阶段?PLC普遍采与循环扫描处事办法,其处事历程普遍分为四个阶段:系统监测阶段、真止中围设备下令阶段、步调真止阶段、输进/输出刷新阶段.2.2 什么是PLC的扫描周期?扫描周期怎么样估计?PLC完毕一个扫描周期所需要的时间,称为扫描周期;将一次处事循环中系统监测阶段、真止中围设备下令阶段、步调真止阶段、输进/输出刷新阶段所需的时间加正在所有估计扫描周期.2.3 什么是PLC的响当令间?正在输出采与循环刷新战间接刷新办法时,响当令间有何辨别?从PLC支到一个输进旗号到PLC背输出端输出一个统制旗号所需的时间,便是PLC的响当令间,使用循环刷新时,正在一个扫描周期的刷新阶段开初前瞬间支到一个旗号,则正在本周期内该旗号便起效率了,那时响当令间最短,等于输进延常常间、一个扫描周期时间、输出延缓时间三者之战;如果正在一个扫描周期的I/O革新阶段刚刚过便支到一个旗号,则该旗号正在本周期内不克不迭起效率,必须等到下一个扫描周期才搞起效率,那时响当令间最少,它等于输进延缓时间、二个扫描周期时间与输出延缓时间三者之战;正在使用间接输出刷新时,最少响当令间等于输进延缓时间、一个扫描周期时间、输出延缓时间三者之战.2.4 PLC的基础摆设包罗那些部分?CQM1的基础摆设包罗CPU、内存单元、I/O模块、电源、浅易编程器等.2.5 接末端扩展战接模块扩展摆设各有什么个性?接末端扩展个性:正在CQM1主机部分接B7A接心单元,而正在近程接相映末端,末端与接心间由单绞线对接.最大传距离可达500m.接模块扩展的个性:正在CQM1主机部分拆置G730主控单元,其上拆有RS-485接心,而正在近程,各模块依次对接,而后再通过单绞线与主控单元贯串.最大传递距离可达200m.2.6 怎么样举止传感器模块的示教安排?其步调怎么样?示教的脚段是安排传感器敏捷度,起安排步调如下:(1)将目标搁正在探头之间.(2)设近程统制器为SET模式.(3)按示教按钮,示教指示灯(橙色)明.(4)目标移出探头处事区,若示教乐成,示教指示灯将转为绿色;若不可功,则仍为橙色,并闪烁.那时应改变目标与探头的距离,返回步调(2)(5)把近程统制器的模式设为RUN,以完毕那次示教.2.7 CX-P编程硬件有那些功能?1.为适用的PLC修坐战编写梯形图或者帮记符步调2.修坐战检索I/O表3.改变CPU单元的支配模式4.正在部分估计机战PLC之间传递步调、内存数据、I/O表、PLC树坐值战I/O注释5.正在梯形图隐现上监控I/O状态战目前值,正在帮记符隐现上监控I/O状态战目前值,以及正在I/O内存隐现上监控目前值.第三章PLC的基础指令及编程3-1.图3-1 习题3-1图LD 00000AND-NOT 00001LD 01600OR 10000AND 00002AND 01601OR-LDLD 10000AND-NOT 01600OR-LDLD 10000OR T00AND-LDOUT TR0AND 00003OUT 10000LD TR0AND 00004TIM 000#01003-2 绘出下列指令语句表对付应的梯形图.①LD 00000OR 00001AND-NOT 00002OR 00003LD 00004AND 00005OR 00006AND-LDOR 00007OUT 10000②LD 00000AND 00001OUT TR0AND-NOT 01601OUT 01600LD TR0OUT 01601LD 01600LD C000OR 25315CNT 000#0002LD 01600OR 01601OR 10000AND-NOT C000OUT 10000解问:将指令语句变换成梯形图时,最先应将以LD指令为起面的电路块找出去,而后根据二个电路块后里的指令决定其相互关系.①如图3-2所示.②如图3-3所示.3-3 对付图3-2所示各梯形图举止化简,而后写出指令语句表.解问:最先将图3-4各梯形图简化成图3-5形式.对付应的指令语句表如下:a)LD 01600 AND 00002 LD-NOT 00001 OR-LDAND 00000 OUT 10000 b)LD-NOT 00004 AND 00005LD 10000AND 00006 OR-LDAND 00003 LD 00002 AND 00004 OR-LDAND 00001 OUT 10000 c)LD 10000 AND 00003AND 00004 OR 00001 AND 00000LD 10000AND 00001LD 00003AND 00004OR-LDAND 00002OR-LDOUT 100003-4写出图3-6所示梯形图对付应的指令语句表.解问:用久存器去处理分支电路.要注意的是,线圈10001前里不接面,果此不必按分支处理.指令语句如下:LD 00001OUT TR0AND 00002AND 00003OUT 10000LD TR0AND 00003OUT 10001AND 10000OUT TR1AND 00006OUT 10002LD TR1AND 00007OR 00008OUT 100033-5绘出图3-7所示梯形图对付应的波形图.解问:绘波形的题考查的是读者对付梯形图的明白.a )本题为一个单按钮开停电路.由于采与了下沿微分,果此,按钮正在屡屡按下并紧开后灵验.00000第一次为ON 并形成OFF 时,01600为ON 一个扫描周期,10000置“1”,此时01601为OFF ;00000第二次为ON 时,由于10000已经为ON ,果此01601正在本周期为ON ,使10000置“0”.如图3-8所示. b)本题为一个障碍报警电路.其中,00000为障碍旗号输进;00001为试灯按钮;00002为解音按钮;10000为灯光报警输出;10001为声响报警输出.25502为1秒时钟脉冲,ON0.5秒,OFF0.5秒.如图3-7所示.3-6 有一个用四条皮戴输支机的传输系统,分别用四台电效果M1~M4启动,如图3-10所示.统制央供如下:(1)起动时,先起动末尾一条皮戴,每延时2s 后,依次起动其余皮戴机,即M4→M3→M2→Ml.(2)停止时,先停最前里一条皮戴,每延时5s 后,依次停止其余皮戴机,即M1→M2→M3→M4.2s 2s 2s 2s 2s 2s(3)当某条皮戴机爆收障碍时,该皮戴机及其前里的皮戴机坐时停下,而后里的皮戴机按停路程序依次停车.试安排谦脚上述统制央供的PLC统制步调.解问:根据央供,每隔2s开用一条皮戴,可由脉冲爆收器去设定时间隔断.设00000为开用按钮,00001为停止按钮,00002、00003、00004、00005分别为四条皮戴的障碍停车旗号;10000为第1条皮戴启动,10001为第2条皮戴启动,10002为第3条皮戴启动,10003为第4条皮戴启动.中间继电器01602战01603的效率是正在开用历程中,连锁接面10002、10001的灵验时间滞后1个扫描周期,以包管开用程序;01604的效率是正在4条传递戴均停止后,复位停止继电器01601,使系统复本,如图3-11所示.3-7 传递戴产品检测:用白中传感器检测传递戴上的产品,若20s内无产品通过,则传递戴停止,共时报警.设检测旗号从00002端子输进,传递戴由10000面启动,报警旗号由10001面统制,00000为起动按钮,00001为停止按钮.解问:如图3-12所示,其中,00001既动做停止按钮,也动做报警排除按钮.3-8 某机床能源头的进给疏通如图3-13所示,00000为开用按钮,按一次则能源头完毕一个处事循环.开用时,能源头处于最左边,10000、10001、10002分别启动三个电磁阀.试安排PLC步调.解问:如图3-14所示,根据给定的波形图,可得到三个电磁阀的开停统制状态.3-9 用PLC真止下述统制央供,分别绘出其梯形图.(1)电效果Ml先起动后,M2才搞起动,M2能单独停车.(2)M1起动后,M2才搞起动,M2不妨面动.(3)M1起动10s后,M2自止起动.(4)M1起动10s后,M2起动,共时M1停止.(5)M1起动后,M2才搞起动;M2停止后,MI才搞停止.解问:如图3-15所示,设00000、00001为M1开、停按钮,00002、00003为M2开、停按钮,00004为M2面动按钮,10000、10001分别为M1、M2启动.第5小题也可仿照图2-19将继电交战线路改写成PLC的梯形图,如图(5b).如图(5a)为采与脆持器的PLC安排办法.3-10 一个用于检测战估计支到包拆机拆置线上的产品数量的统制电路如图3-16所示.当计数器计到12个产品时,电路接通一个电磁线圈,2s后,电磁线圈自动断开.试用PLC与代该继电器统制线路.解问:对付于继电器统制线路的PLC变革问题,应最先相识本系统工艺央供,而后决定PLC的型号及面数,并举止通讲调配,末尾绘出梯形图.设00000为路程开关XK输进,10000为电磁线圈X输出,其余均由PLC里里器件真止:安排数器CC为C000,定时器KT为T001,中间继电器K为01600,则梯形图如图3-17所示.3-11用PLC统制三个交战器KMl、KM2、KM3动做.央供:按下开用按钮后,KMl、KM 2开用,10s后,KM2断电,再过5s后,KM3接通,按停车按钮后,KM1、KM3断电.解问:如图3-18所示,设00000、00001为开、停统制按钮,KMl、KM2、KM3分别由10000、10001、10002启动.3-12 试安排用PLC真止的暗号锁统制.有8个按钮SBl~SB8,其统制央供为:(1)SB7为开用按钮,按下SB7才不妨举止开锁做业.(2)SBl、SB2、SB5为可按压键.开锁条件:SBl设定按压次数为3次,SB2设定按压次数为2次,SB5设定按压次数为4次,如按此条件依次按键,则暗号锁挨开.(3)SB3、SB4为不可按压键,一按压报警器便响,收出警报.(4)SB6为复位按键,按下SB6,沉新开初开锁做业.(5)SB8为停止按健,按下SB8,停止开锁做业.解问:如图3-19所示,设00006、00007为开、停统制按钮SB7、SB8,SB1:00000,SB2:00001,SB3:00002,SB4:00003,SB5:00004,SB6:00005,10000为开锁旗号,10001为报警旗号.图中,开锁旗号保护1s,报警旗号则必须按复位按钮才搞排除;计数器C000战C001的复位端将自己输出旗号与相映的按压旗号串联,可预防超出确定次数的按压灵验;按下停止按钮后,开锁支配无效,但是要沉新开锁,必须先按复位键SB6.第四章PLC功能指令及应用4.1正在某些统制场合,需要对付统制旗号举止分频处理.试安排一个四分频的PLC统制步调.解:设输进面为00000,输出端为10000.图4-1(a)为用计数器战比较指令安排的步调,截止比较曲瞅;本题也可用移位器去安排,如图4-1(b)所示,利用00000自己动做移位脉冲,则01601的输出状态刚刚佳谦脚央供,图4-1(c)为时序图.4.2安排彩灯统制电路,央供:9组彩灯,开用后分二种动做接替循环举止.(1)分三大组,1、4、7为一组,2、5、8为一组,3、6、9为一组,每大组依次明1s.(2)按1到9程序,每组依次明1s.解:设开用按钮00000,停止按钮00001;输出彩灯分别为10001,10002,10003,10004,10005,10006,10007,10008,10009;如图4-2所示,按下开用按钮00000后,彩灯按央供循环明灭,按下停止按钮00001后,彩灯坐时燃烧.4.3试安排一个能估计底下算式的PLC步调,设X1、X2为4位十进制数.解:设X1存搁正在DM0000中,X2存搁正在DM0001中,截止Y存搁正在DM0002中.由于本题的估计有条件节制,最简单料到的是先通过比较指令推断条件,而后根据央供举止估计,如图4-3(a)所示;本题也不妨先举止减法运算,如果有借位,则表示X1 <X2,果此再沉新按加法估计,如图4-3(b)所示.4.4安排一小车统制步调,如图4-4所示,央供起动后,小车由A处开初从左背左止驶,到每个位子后,均停车2s,而后自止开用;到达E位子后,小车间接返回A处,再沉复上述动做,当每个停车位子均停车3次后,小车自动停于A处.试用步进指令战移位指令二种要领安排.解:设对付应A、B、C、D、E面的检测开关由00000、00001、00002、00003、00004面输进,00005为开用按钮;小车左止为10000,左止为10001.用移位指令战步进指令真止的梯形图分别睹图4-5战图4-6.4.5安排齐通齐断喊响提示电路:当3个开关齐为ON或者齐为OFF时,旗号灯收光.解:设3个开关分别为00000、00001、00002,旗号灯由10000统制.图4-7为真止该电路的三种要领.4.6 试体例能隐现可顺计数器目前值的PLC步调.解:图4-8(a)为用七段码隐现2位可顺计数器目前值的PLC 步调,图4-8(b)为用BCD码隐现2位可顺计数器目前值的PLC步调.4.7用10个按钮统制一位BCD数码隐现:按下0按钮时,数码隐现0;按下1按钮时,数码隐现1;……按下9按钮时,数码隐现9.试用基础指令战译码指令二种要领体例该步调.解:用基础指令编程时,思路比较简朴,但是步调较搀杂,而用功能指令编写的步调往往非常简朴.如图4-9所示,图(b)既可代替图(a)的功能.4.8电动葫芦起降机构的动背荷考查,统制央供如下:(1)可脚动降下、下落;(2)自动运止时,降下6s→停9s→下落6s→停9s,循环运止1h,而后收出声光旗号,并停止运止.试安排用PLC统制的上述系统.解:设脚动降下为00000,脚动下落为00001,自动为00002,声光复位为00003;输出旗号:降下10000,下落10001,声光10002.根据央供,循环运止1h,正佳是120个循环.梯形图睹图4-10.4.9央供:按下开用按钮后,能根据图4-11所示依次完毕下列动做:(1)A部件从位子1到位子2.(2)B部件从位子3到位子4.(3)A部件从位子2回到位子1.(4)B部件从位子4回到位子3.用PLC真止上述央供,绘出梯形图.4.10试安排一个4层电梯PLC统制系统,央供:某层楼有呼喊旗号时,电梯自动运止到该楼层后停止;如果共时有2或者3个楼层呼喊时,依先后程序排列,共目标便近楼层劣先;电梯运止到先呼喊的楼层时,待门关宽后,电梯自止开用,运止至下一个楼层.解:最先举止通讲调配:输进旗号:一层内选指令按钮00000二层内选指令按钮00001三层内选指令按钮00002四层内选指令按钮00003一楼进与呼梯按钮00004二楼进与呼梯指令00005三楼进与呼梯指令00006二楼背下呼梯指令00007三楼背下呼梯指令00008四楼背下呼梯指令000091~4层路程开关(并联)00010脚动开门按钮00011输出旗号:电梯上止及指示10000电梯下止及指示10001一层到站指示10002二层到站指示10003三层到站指示10004四层到站指示10005呼梯旗号指示10006开门状态指示10007一楼内选旗号指示10100二楼内选旗号指示10101三楼内选旗号指示10102四楼内选旗号指示10103一楼进与呼喊指示10104二楼进与呼喊指示10105三楼进与呼喊指令10106二楼背下呼喊指示10107三楼背下呼喊指令10108四楼背下呼喊指令10109电梯统制的PLC梯形图如图4-13所示.第五章PLC联网与通疑5.1 数据通疑主要采与那二种办法?从通疑单圆疑息的接换办法上分为那几种?数据通疑主要采与并止通疑战串止通疑二种办法.从通疑单圆疑息接互办法瞅,数据通疑办法有以下三种:单工通疑、半单工通疑、齐单工通疑.5.2 数据通疑的主要技能指标有那些?通疑波特率:通疑波特率是指单位时间内传递的疑息量.误码率:误码率PC=NC/N.N为传输的码元(一位二进制)数,Nc为过得码元数.正在估计机搜集通疑中,普遍央供PC 为10-5~10-9,以至更小.5.3 比较RS-232C、RS-422/ RS-485串止通疑接心?5.4 简述OMRON PLC搜集的主要典型?试证明CompoBus/D战CompoBus/S各自的个性?主要典型有:以太网(Ethernet)、SYSMAC NET网、SYSMAC Link网、Controller Link网、HOST Link网、PC Link 网、Remote I/O网、CompoBus/D、CompoBus/S网.CompoBus/D:CompoBus/D是一种开搁、多主控的器件网,其功能有近程开关量战模拟量的I/O统制及疑息网通疑.是一种较为理念的统制功能齐齐、摆设机动、真止便当的分别统制搜集.CompoBus/S:CompoBus/S也是器件网,是一种下速ON/OFF系统统制总线,使用CompoBus/S博用通疑协议.CompoBus/S功能不迭CompoBus/D,但是它真止简朴,通疑速度更快.主要的功能为近程开关量的I/O统制.5.5 OMRON C系列PLC有几种通疑系统,各自的功能战个性怎么样?上位机链接系统:以IBM微机为上位机,通过HostLink 单元把它动做下位机的PLC互连起去形成的系统称为上位机链接系统.共位链接系统:把数台PLC通过PC-Link单元互连正在所有便形成了共位链接系统,果为从通疑角度瞅,每台PLO职位相共,不主从之分,所以称为共位链接系统.下位链接系统:下位链接系统又称近程I/O系统.它是以一台PLC为主,通过近程I/O链路把近程I/O单元、近程末端及I/O链接单元互连正在所有形成的系统.5.6 简述上位链接系统组成?上位链接系统是以一台微型估计机做上位机,数台可编程统制器做下位机,通过HOST Link单元及串止总线互联而成的监督统制系统.其普遍由上位机、Link适配器、HOST Link单元、传输介量组成.。
第3章数控车床编程
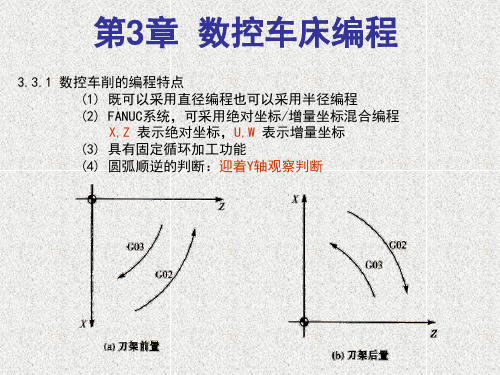
把一系列连续加工动作,用一个循环指令完成
如: 切入 — 切削 — 退刀 — 返回
1. 圆柱面(圆锥面)切削固定循环(G90) (用于轴类零件)
(1) 圆柱面切削
G90 X(U)_ Z(W)_ F_
(2)圆锥面切削循环:G90 X(U)_Z(W)_ R_ F_;
【例3-5】加工图示零件。主轴转速1000 r/m,进给速度200 mm/min,试 利用圆柱面切削单一循环指令编写其粗、精加工程序
图3-24平端面切削循环的轨迹 图3-25 斜端面切削循环的轨迹
例3-7 试用平端面切削循环G94指令编写图3-24所示工件的加工程序,毛 坯为φ50mm的棒料,只加工φ20mm外圆至要求尺寸。
• O0007; •
N10 T0101; • N20 M03 S600; • N30 G00 X52.0 Z2.0; • N40 G94 X20.0 Z-2.0 F100 • N50 Z-4.0; • N60 Z-6.0; • N70 Z-7.5; • N80 Z-8.0 F50; • N90 G00 X100.0 Z100.0; • N100 M30;
例3-8 试用斜端面切削循环G94指令编写图3-25所示工件的加工程序,毛 坯为φ50mm的棒料,只加工锥面至要求尺寸。
• O0006; • N10 T0101; • N20 M03 S600; • N30 G00 X53.0 22.0; • N40 G94 X20 .0 Z5.0 R-5 .5 F100; • N50 Z3.0; • N60 Z1.0; • N70 Z-1.0; • N80 Z-3.0; • N90 Z-4.5; • N100 Z-5.0 F50; • N110 G00 X100.0 Z100.0; • N120 M30;
《数控加工编程与操作》课件第3章

第 章 数控车削加工及编辑
图3.5 圆弧方向的判别
第 章 数控车削加工及编辑
说明: (1) 绝对编程时,X、Z是指圆弧插补的终点坐标值;增 量编程时,U、W为圆弧的终点相对于圆弧的起点的坐标值。 (2) I、K是指圆弧起点到圆心的增量坐标,与G90,G91 无关,为零时可省略。有的机床厂家用I、K作为起点相对于 圆心的坐标增量。 (3) R为指定圆弧半径,当圆弧的圆心角小于等于180° 时,R值为正;当圆弧的圆心角大于180°时,R值为负,如 图3.6所示。同一程序段中,I、K、R同时出现时,R优先,I、 K无效。
第 章 数控车削加工及编辑
图3.1 恒线速切削方式
第 章 数控车削加工及编辑
(3) 恒线速度取消G97。 编程格式:
G97 S ; S后面的数字表示恒线速度控制取消后的主轴转速,如S 未指定,将保留G96的最终值。
例3.5 “G97 S1000;”表示恒线速度控制取消后主 轴转速为1000 r/min。
深孔钻循环 外径切槽循环 复合螺纹切削循环
第 章 数控车削加工及编辑
G27
G28
00
G29
*G40
G41
07
G42
G50
00
回参考点检查 回参考点 参考点返回 刀补取消 左刀补 右刀补 坐标系设置
*G90
外圆切削循环
G92
01
螺纹切削循环
G94
端面切削循环
G96
主轴恒线速度控制
* G97
02
取消主轴恒线速度控制
第 章 数控车削加工及编辑
例3.8 实现图3.4中从P0点到P1点的运动,其程序段为:
第三章 数控车床编程
第3章 数控车削编程
2.任意角度倒角(略)
直线进给程序段尾部加上C__
C的数值是虚拟拐角
点距倒角始点或终点
间的距离,如图:
L1 o L2
a
例:G01 X50 C10
X100 Z-100
b
第3章 数控车削编程
3.倒圆角 编程格式: G01 Z(W) b R±r 圆弧倒角情况如图所示 编程格式: G01 X(U) b R±r 圆弧倒角情况如图所示
例:G99 F0.2 表示
进给量为0.2 mm/r
第3章 数控车削编程
(2)每分进给量(单位:mm/min) 编程格式:G98 F ; 该指令组合是用来设定主轴每分钟刀具的进给量,如图所示。F指令 范围为1~15000.0000(mm/min)。
例:G98 F100 表示
进给量为100mm/min
G02/G03 参数说明
第3章 数控车削编程
4) 当已知圆弧终点坐标和半径时,可以选取半径编程的方式插补圆弧,R为 圆弧半径,当圆心角小于等于180度时R为正;大于180度时R为负。 5)当I、K和R在同一程序段出现时,R优先,I、K无效。 6)当程序段中省略X、Z时,表示起点与终点重合,若在程序段中指定了I、 K,即可进行整圆编程。
2) 相对编程 N10 G00 X40 Z110; N20 G03 U80 W-40 I0 K-40 F0.1;(R40) N30 G02 U-32 W-32 I0 K-20;(R20)
第3章 数控车削编程
作业1: 如图所示,编写下图零件精加工程序(分别采用前置刀架坐 标系和后置刀架坐标系)
第3章 数控车削编程
例如:欲停留1.5s时,则程序段为: G04 X1.5 或 G04 U1.5 或 G04 P1500
第三章S7-200PLC基本指令二

如果IN是以角度值表示的实数,要先将角度值转化为 弧度值。方法:用实数乘法指令×R,用角度值乘以π/180
即可。
6)正切函数(TAN)
TAN指令的功能是求1个双字长(32位)的实数弧度值IN
的正切值,得到32位的实数结果OUT。
操作数 IN
ห้องสมุดไป่ตู้
类型 REAL
寻址范围 VD, ID, QD, MD, SD, SMD, LD, AC, *VD, *AC, *LD和常数
IN1,OUT
4.除法指令—对两个有符号数进行相除运算
DIV-I DIV-DI DIV-R DIV
EN ENO IN1 IN2 OUT
EN ENO IN1 IN2 OUT /D IN2,OUT
EN ENO IN1 IN2 OUT /R IN2,OUT
EN ENO IN1 IN2 OUT DIV IN2,OUT
第三章 S7-200PLC基本指令
主讲:李宏伟
3、关系运算指令 4、数学运算指令 5、数据处理指令 6、程序控制指令
第三节 关系运算指令
关系运算是通过比较指令来实现的,比较指令为上、
下限控制提供了方便,比较指令实际上是一个比较触点, 用于两个相同数据类型的有符号数或无符号数IN1和IN2的
比较判断操作。
2、逻辑“或”指令
ORB IN1,OUT 字节“或”
ORW IN1,OUT 字“或”
ORD IN1,OUT 双字“或”
逻辑“或”指令是对两个输入端(IN1、 IN2)的数据 按位“或”,结果存入OUT单元。在STL中IN2与OUT为同 一存储单元。
3、逻辑“异或”指令
XORB IN1,OUT 字节“异或”
COS指令的功能是求1个双字长(32位)的实数弧度
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第九节汇编语言典型编程方法汇编语言编程只讲一些最基本的,复杂的运算不讲,因为后面还要讲单片机C语言编程,用单片机C语言编程有很大的优越性。
学习了单片机C语言编程后,提倡用C语言和汇编语言混合编程,以C语言为主。
一、算术逻辑处理例1:将40H开始存放的10 个字节的数与50H开始存放的10 个字节的数相减(假设被减数大于减数)。
设被减数地址(指针)存放在R0, 减数地址(指针)存放在R1, 差数放回被减数单元, R5 存放字节个数, 则程序如下:SUB: MOV R0, #40H ;被减数首地址MOV R1, #50H;减数地址MOV R5, #10;字节个数CLR C;清进位位SUB1: MOV A, @R0;被减数送累加器ASUBB A, @R1;两数相减结果送AMOV @R0, A;结果送被减数地址INC R0;指向下一个被减数INC R1;指向下一个减数DJNZ R5, SUB1;10个数未运算完,转SUB1RET例2:将两个半字节数合并成一个字节数。
设内部RAM 40H, 41H单元中分别存放着8 位二进制数, 要求取出两个单元中的低半字节, 并成一个字节,将40H的低字节为合成字节的高字节,存入50H单元中。
程序如下:START: MOV R1, #40H ; 设置R1为数据指针MOV A, @R1 ; 取40H中的内容ANL A, #0FH; 取40H的低半字节SWAP A; 40H低半字节移至高半字节INC R1 ; 修改数据指针,指向41H;XCH A, @R1 ; 41H内容送A,40H低半字节送41H原40H低半字节送41H高半字节;ANL A, #0FH ; 取41H的低半字节ORL A, @R1; 拼字MOV 50H, A ; 存放结果在50HRET二、数制转换程序例3:将一个字节二进制数转换成BCD码。
转换后存到RAM的20H、21H。
源程序:MOV B,#100 ;MOV A,#99H ;被转换数(153)DIV AB ;求百位,商在A,余数在BMOV 21H,A ;将百位数送RAM的21HMOV A,#10 ;XCH A,B ;被除数送A,除数送BDIV AB ;十位在A,个位在BSWAP A ;将十位移到高4位ADD A,B ;将十位与个位合并,放到AMOV 20H,A ;将十位、个位存20H单元RET (调二-BCD转换)例4:二进制转换为十进制将计数器的TH0读入R2,TL0读入R3,将读入的16位二进制转换为5位十进制(最大65535)。
1)转换结果为5位,必须占3个存储单元,将转换结果存到R4、R5、R6中。
2)二-十进制转换公式i i 102a N ∑= i =0,…,M M 为二进制的位数,从右向左,从0开始;a i 为该位的值“1”或“0”。
如1010转换为二进制:1020212021N 012310=⨯+⨯+⨯+⨯=3)转换编程思路如何编程实现转换,以上面1010中的最高位1为例:20=1;21=20+20=1×2=2;(1+1)22=21+21=2×2=4;(2+2)23=22+22=4×2=8;(4+4)规律:当前位置的权值(如权值为3)是将从1开始每步自相加的结果。
将所有系数为1的权值累加起来就是十进制的结果。
实现方法:把R2、R3中的二进制带进位位左移,就是最高位开始累加,每移一次,将R4、R5、R6带进位位自加(相当于乘2),最高位等于a15×215,如果最高位为1,循环16次就累加了16次,变成32768。
依次类推,实现了转换。
4)参考源程序Z0Y0:CLR A ;A清0;MOV R4,A ;R4、R5、R6清0,R4放最高位MOV R5,A ;MOV R6,A ;MOV R7,#10H ;循环16次LO30:CLR C ;进位位清0,进位位中存放的系数,最高为开始MOV A,R3 ;以下将二进制带进位位左移(6句)RLC A ;低位的最高位送入CMOV R3,A ;MOV A,R2 ;RLC A ; 把低位中的最高位送入高位的最低位,高位的最高位MOV R2,A ;移到CMOV A,R6 ;将十进制的低位送AADDC A,R6 ;带进位位相加,进位位是由上面左移得到DA A ;进行十进制调整MOV R6,A ;将结果又送R6MOV A,R5 ;对十进制中位进行处理ADDC A,R5 ;进位位是由R6相加到进位时得到DA A ;MOV R5,A ;MOV A,R4 ;对十进制高位进行处理ADDC A,R4 ; 进位位是由R5相加到进位时得到DA A ;MOV R4,A ;DJNZ R7,LO30;判断是否循环了16次RET(调二-十转换)例5:双向分支程序设计设X存在30H单元中,根据下式X+2 X>0Y = 100 X=0 求出Y值,将Y值存入31H。
∣X∣X<0解:根据数据的符号位判别该数的正负,若最高位为0,再判别该数是否为0。
程序流程如图4-4所示。
参考程序如下:ORG 1000HMOV A,30H ;取数JB ACC.7,NEG ;最高位为符号位,负数=1,转NEGJZ ZER0 ;最高位为零,判读X为0转ZER0ADD A,#02H ;为正数,求X+2AJMP SAVE ;转到SAVE,保存数据ZER0:MOV A,# 64H ;数据为零,Y=100AJMP SAVE ;转到SAVE,保存数据NEG:DEC A ;CPL A ;求∣X∣,负数用补码表示,要求绝对值,减1取反SAVE:MOV 31H,A ;保存数据SJMP $;暂停例6:多向分支程序设计举例,根据R0的值转向7个分支程序。
R0<10,转向SUB0;R0<20,转向SUB1;…R0<60,转向SUB5;R0=60,转向SUB6;解:利用JMP @A+DPTR 指令直接给PC赋值,使程序实现转移。
参考程序如下:ORG 2000HMOV DPTR,#TAB ;转移指令表首地址MOV A,R0 ;取数MOV B,#10……DIV AB ;A/10,商在A中,也进行了取整CLR CRLC A ;A←2A,因为AJMP是双字节指令JMP @A+DPTR ;PC ←A+DPTRTAB: AJMP SUB0 ;转移指令表AJMP SUB1AJMP SUB2…AJMP SUB5AJMP SUB6四、循环程序的结构例7:有一数据块从片内RAM的30H单元开始存入,设数据块长度为10个单元。
根据下式:(原数据为x,计算后的数据为y)X+2 X>0Y= 100 X=0 求出Y值,并将Y值放回原处。
∣X∣X<0解:设置一个计数器控制循环次数,每处理完一个数据,计数器减1。
参考源程序如下:ORG 2000HMOV R0,#10 ;数据长度MOV R1,#30H ;起始地址START:MOV A,@R1 ;取数JB ACC.7,NEG ;若为负数,转NEGJZ ZER0 ;若为零,转ZER0ADD A,#02H ;若为正数,求X+2AJMP SAVE ;转到SAVE,保存数据ZER0:MOV A,# 64H ;数据为零,Y=100 AJMP SAVE ;转到SAVE,保存数据NEG:DEC ACPL A ;求∣X∣SAVE:MOV @R1,A ;保存数据INC R1 ;地址指针指向下一个地址DJNZ R0,START ;数据未处理完,继续处理SJMP $;动态停止五、子程序的调用通常把这些基本操作功能编制为程序段作为独立的子程序, 以供不同程序或同一程序反复调用。
在程序中需要执行这种操作的地方放置一条调用指令, 当程序执行到调用指令, 就转到子程序中完成规定的操作, 并返回到原来的程序继续执行下去。
子程序调用中, 主程序应先把有关的参数存入约定的位置, 子程序在执行时, 可以从约定的位置取得参数, 当子程序执行完, 将得到的结果再存入约定的位置, 返回主程序后, 主程序可以从这些约定的位置上取得需要的结果, 这就是参数的传递。
例8、将一个字节拆分成两个字节,用于显示。
设待拆字符已经存入累加器A,R0中存放的是转换后的低字节地址。
是实验中的一段程序。
很重要!本段程序本身是一段子程序;在其中又调用子程序。
PTDS:MOV R1,A ;将待拆字符送R1,暂存ACALL PTDS1 ;调子程序MOV A,R1 ;将待拆字符送ASWAP A ;高4位与低4位交换PTDS1:ANL A,#0FH ;读取低4位,该段程序运行两次,第二次实际读高字节MOV @R0,A ;存拆开后的字节,INC R0 ;指向下一个存放高字节的地址RET(可以运行“字符拆分”)六、查表程序(*)查表程序是一种常用程序, 它广泛使用于LED显示控制、打印机打印控制、数据补偿、数值计算、转换等功能程序中, 这类程序具有简单、执行速度快等特点。
所谓查表法, 就是预先将满足一定精度要求的表示变量与函数值之间关系的一张表求出, 然后把这张表存于单片机的程序存储器中, 这时自变量值为单元地址, 相应的函数值为该地址单元中的内容。
查表, 就是根据变量X在表格中查找对应的函数值Y, 使Y=f(X)。
例9:一个十六进制数存放在内部RAM 的40H单元的低 4 位中, 将其转换成ASCII码并送回40H单元。
十六进制0~9的ASCII码为30H~39H, A~F的ASCII码为41H~46H, ASCII码表格的首地址为ASCTAB。
编程如下:ORG 1000HHEXASC: MOV A, 40HANL A, #0FH;取低4位MOV DPTR ,#ASCTAB ; 对待查询值修改指针,见下面MOVC A, @A+DPTRMOV 40H, ARETASCTAB: DB 30H, 31H, 32H, 33H, 34H,35H, 36H, 37H, 38H, 39H,41H, 42H, 43H, 44H, 45H,46H第十节单片机基本资源编程一、端口和中断资源编程注意事项:•单片机复位后,特殊功能寄存器IE、IP内容均为00H,所以应对IE、IP进行初始化编程,以开放中断,允许某些中断源中断和设置中断优先级等。
•中断系统对五个中断源分别规定了各自的入口地址,但这些入口地址相距很近(8个字节)。
•如中断服务程序的指令代码少于8个字节,则可从规定的中断服务程序入口地址开始,直接编写中断服务程序;•如中断服务程序的指令代码大于8个字节,则应采用与主程序相同的方法,在相应的入口处写一条跳转指令,并以跳转指令的目标地址作为中断服务程序的起始地址进行编程。
例10:如图所示,将P1口的P1.4~P1.7作为输入位,P1.0~P1.3作为输出位。