浅析CRH3型动车组速度里程计算及控制策略
CRH动车组驱动装置的控制策略与参数调整

CRH动车组驱动装置的控制策略与参数调整CRH动车组是中国铁路高速动车组的代表,具有高速、节能、安全等优势。
而驱动装置作为CRH动车组的核心组成部分,其控制策略和参数调整对于车辆的性能和运行效率至关重要。
本文将就CRH动车组驱动装置的控制策略与参数调整进行探讨。
一、控制策略在CRH动车组的驱动装置控制中,采用了先进的逆变器技术,优化了电机控制算法,以实现对电机转矩和速度的精准控制。
控制策略主要包括以下几个方面:1.转矩控制:通过控制电机的电流和电压,实现对电机输出转矩的调节。
在启动加速和制动减速时,需要根据列车的运行状态和线路特性,动态调整转矩控制策略,以确保车辆平稳运行。
2.速度控制:根据列车的运行速度和目标速度,调整电机的输出功率,实现对列车速度的稳定控制。
在高速行驶和进出站台时,需要对速度控制策略进行优化,以提高车辆的运行效率和安全性。
3.能量回馈控制:利用制动过程中的惯性能量和电动制动能量,实现对列车动能的回馈控制,提高整车系统的能量利用率。
通过逆变器和超级电容等设备的协同作用,实现能量的高效储存和回馈利用。
二、参数调整在CRH动车组的驱动装置参数调整中,需根据列车的运行状态和线路特性,动态调整电机参数和控制参数,以确保车辆的性能和安全。
参数调整主要包括以下几个方面:1.电机参数调整:根据列车的牵引负载和最大速度要求,调整电机的额定功率、额定转速和电流容量等参数。
通过匹配电机参数和车辆特性,优化列车的动力性能和能耗指标。
2.控制参数调整:根据列车的运行环境和行车任务,调整逆变器控制器的参数,如PWM频率、电压幅值、功率因数等。
通过合理调整控制参数,提高电机转矩响应速度和稳定性。
3.故障诊断参数调整:根据电机和逆变器系统的运行状态,设置故障诊断参数,实现对设备状态和性能的实时监测和诊断。
通过定期检测和修正故障诊断参数,提高列车运行的可靠性和安全性。
综上所述,CRH动车组驱动装置的控制策略和参数调整至关重要,直接影响列车的性能和运行效率。
CRH3-380动车组技术培训教材-控制系统

5
2. 安全可靠
• (4)采用独特的干线型MVB网络结构
动车单元内车辆间的MVB通信采用独立的MVB网段作为干线,各 车MVB网段通过中继器与之连接; 克服了MVB通信距离短,同时将网络通信故障以车为单位隔离。
8
9
• 连接到列车网络控制系统的设备主要有:
中央控制单元(主和从CCU)和附属网关; 司机显示屏(司机的MMI); 列车保护系统(CTCS); 牵引控制单元(TCU); 制动箱的制动控制单元(BCU); 蓄电池充电机(BC)控制系统; 辅助变流器控制单元(ACU); 车门控制装置(车门); 采暖、通风和空调控制单元(HVAC); 旅客信息系统(PIS)的中央系统控制器(STC); 列车员显示屏(TA-MMI); 受电弓; 分布式输入/输出设备(包括SIBAS® KLIP 和 MVBCompact I/O);
4
2. 安全可靠
依据总体对列车网络控制系统提出的能力性指标、安全性指标、 可靠性指标和可用性指标,CRH3-380型动车组网络控制系统在设计 时重点考虑了有以下几点: • (1)符合IEC61375-1《列车通信网络》标准要求; • (2)符合UIC556《列车通信网络上的信息传输》标准要求; • (3)列车级、车辆级总线及重要控制设备或装置采用冗余结构; 当上述总线和控制设备或装置单个故障时,动车组能正常运营, 提高了系统的可用性。主要有以下冗余:
11
2. 网络控制系统硬件组成
CRH3-380型动车组的列车网络控制系统硬件主要 包括:中央控制单元CCU、人机界面HMI、输入/输出 设备KLIP、紧凑式I/O模块、紧凑式Pt100模块、MVB 中继器、数据记录仪、MVB/WTB连接器及电缆、无限 传输设施等。
浅谈CRH3系列动车组制动控制系统
浅谈CRH3系列动车组制动控制系统制动控制系统是制动系统中的核心组成部分,在由司机或列车自动控制系统ATP控制的制动过程中,负责生成、传递制动信号,并对制动力进行计算和分配的部分。
制动控制系统能够实现列车常用制动、紧急制动等功能,同时对于制动系统可能发生的故障、失效等情况,制动控制系统具有完善的故障诊断措施和故障导向安全的控制体系。
CRH3系列动车组包括CRH3C、CRH380B和CRH380BL动车组,其制动控制系统具有空电复合制动功能,空气制动部分由微机控制的直通式制动系统和备用的自动式制动系统组成。
直通式制动系统通过列车网络与硬线传输制动控制指令;自动式制动系统由列车管传输制动控制指令。
下面针对CRH3系统动车组中制动控制系统的电气原理、气路原理、空电复合方式及故障诊断进行介绍。
1 电气原理CRH3C和CRH380B动车组制动系统的系统组成如图1,CRH380BL动车组在此基础上仅增加编组数量。
电制动和空气制动的协调由制动控制单元EBCU、牵引控制单元TCU和列车中央控制系统CCU进行控制。
在一个牵引单元(4辆车)内,数据交换由MVB来完成,牵引单元之间的通讯由WTB完成。
1.1 常用制动列车运行过程中,司机可通过“制动控制手柄”发出制动指令,制动级位与“制动控制手柄”扳动的角度成比例。
同时,列车控制系统也可产生常用制动指令。
负责列车制动管理的主EBCU接收制动指令,按照优先施加电制动原则进行整车制动力分配,并通过MVB和WTB将制动指令发送至各车EBCU。
主EBCU确保在制动过程中不会因制动力过高导致轮轨黏着超标,确保空气制动装置的载荷均匀。
单车EBCU通过MVB读入制动指令,并控制本车电制动和空气制动的复合。
动车EBCU向本车TCU发送电制动请求并接收反馈信号,由TCU施加电制动。
电制动不足部分,由本车BCU控制常用制动电磁阀补充空气制动。
制动施加/缓解状态记录在各车的EBCU中,同时通过MVB和WTB报告给司机。
CRH3动车组牵引逆变器设计及其PWM控制算法分析_交通大学毕业设计(论文)

毕业设计(论文)CRH3动车组牵引逆变器设计及其PWM控制算法分析第一章绪论本章作为引言,主要介绍了动车组概念及组成,逆变技术的发展过程及现状,最后简要归纳了本课题的研究任务并对文章安排做了简要介。
1.1 动车组1.1.1 动车组概念及组成“动车组”这个词流行之前,同样的事物也被称做“列车组”、“机车组”等,“动车组”其实是个非常简单的概念。
动车组是按动力分布方式而命名的,其实就是动力分散式列车。
动力集中式列车的牵引力是机头产生,动力集中于一侧。
具有牵引力的动车与无动力的拖车再加上机头,三者组合称为动车的组合,简称动车组。
把动力装置分散安装在每节车厢上,使其既具有牵引动力,又可以载客,这样的客车车辆便叫做动车。
而动车组就是几节自带动力的车辆加几节不带动力的车辆编成一组,就是动车组。
带动力的车辆叫动车,不带动力的车辆叫拖车。
此外有“狭义动车组”一说,英文名为“MU”,全称“Multiple Units”,意为“单元式组合列车”。
“单元”是这种列车中最突出和最核心的概念。
“单元”指若干车辆以特定方式连挂以实现特定功能的编组。
而当这样的编组中一节车也不能再缩减时,称做“最小单元”。
某些情况下,单元内会有可以摘除冗余车辆,但多数情况下单元就是最小单元。
最小单元一旦被拆散,该单元用以实现的功能将消失,或者不再完整。
在比较罕见的情况下,单节车也可以成为单元。
为方便进一步描述,可以按照以下方式划分单元:1. 制动单元。
2. 自走单元。
3. 随走单元。
4. 运营单元。
5. 特殊单元动车组的组成,有多种方式:①由两节或两节以上的动车联挂组成。
②一节动车和一节或数节无动力的附挂车组成,尾部附挂车的末端设有驾驶台。
③两端为动车,中间连接一节或数节无动力的附挂车。
④两端为动车,中间连接多节附挂车,但与动车相邻的附挂车中靠近动车的转向架是驱动转向架,另一动车组列车[1]转向架为无动力的关节式转向架,其他附挂车的转向架均为无动力的关节式转向架。
CRH3-380动车组技术培训教材-控制系统
• 给水卫生系统的故障诊断
• 雨刷风笛装置的故障诊断 辅助运行设备
31
第三部分
网络控制系统优化比较
32
网络控制系统自身优化
对CRH3-380型动车组的网络控制系统优化主要有: 网络拓扑结构的优化; 网络IO触点根据设计方案进行相应调整; 控制逻辑和故障诊断的调整; 优化司机台和乘务员室监视器显示界面。
11
2. 网络控制系统硬件组成
CRH3-380型动车组的列车网络控制系统硬件主要 包括:中央控制单元CCU、人机界面HMI、输入/输出 设备KLIP、紧凑式I/O模块、紧凑式Pt100模块、MVB 中继器、数据记录仪、MVB/WTB连接器及电缆、无限 传输设施等。
12
(1)中央控制单元 中央控制单元CCU主要包括MVB32板卡、各控制 板卡及网关板卡等组成。CCU通过收集分布式输入/输 出设备和连接到MVB总线上的其他设备信号,进行逻 辑判断后发布指令,对动车组实施控制。
13
(2)人机界面 人机界面HMI位于司机室和乘务员室,主要承担的任务有: 动车组的人机操作接口; 为动车组和牵引单元提供诊断系统; 通过发出声音信号,通知司机有关列车控制方面的特殊情况;
14
(3)分布式输入/输出设备 KLIP 由带有许多不同模块组成的数字 I/O ( 110V DC)分布式输入、输出设备。通过车辆总线(MVB) 与 CCU 进行通讯,可以将被监控设备的状态信息传输 给CCU,或执行CCU的指令。
33
(1)网络拓扑结构的优化
增加数据记录仪
增 加 数 据 记 录 仪
CRH3-380在EC01/EC16车增加数据记录仪,用于记录重要事件 和故障记录信息。
CRH3动车组_总体技术.

第2章总体技术目录第2章总体技术 (2)2.1概况 (2)2.1.1原型车一般情况 (2)2.1.2原型车主要技术特征 (2)2.1.3高新技术采用的情况 (4)2.1.4与原型车的主要差异 (4)2.2 主要总体特性 (6)2.2.1列车总体描述及动力配置 (6)2.2.2总体平面布置 (7)2.2.3车种车型设置及特征 (17)2.2.4旅客界面 (17)2.2.5主要技术参数 (19)2.2.6在中国使用所受的限制 (20)2.3 车种车型 (21)2.3.1车内布置 (21)2.3.2车下布置 (24)2.4 牵引制动特性 (25)2.4.1动车组牵引特性 (25)2.4.2动车组制动特性 (29)2.4.3与ATP系统的衔接 (34)2.4.4救援回送的工况 (43)2.5 动车组标记 (55)2.5.1车外标记 (55)2.5.2车内标记 (62)第2章总体技术2.1概况2.1.1原型车一般情况CRH3动车组的原型车是Velaro-E动车组。
它是以德国铁路股份公司(DB AG)的ICE-3高速动车组为原型车开发研制的,最高运行速度达350km/h,用于西班牙新建的马德里—巴塞罗那高速铁路,将2007年投入运用。
由于ICE系列动车组是德国国铁的注册商标,所以西门子公司为西班牙提供的动车组定名为Velaro-E,Velaro-E是西门子公司具有自主知识产权的品牌。
自1991年首批ICE高速旅客列车投入运营以来,ICE系列高速列车一直在不断地改进。
ICE-1是德国首批高速列车,运行速度为250 km/h,它的成功为后续高速列车建立了极好的基础。
ICE-2充分发挥了高速列车的基本特性,通过灵活编组,适应了德国客流量的变化,设置了控制车,提高了列车的运能。
ICE-3高速动车组不仅致力于增加定员,还致力于在颇具挑战性的线路上达到330km/h的最高运行速度。
为了满足高速、大坡度 (40‰)、起停频繁及加减速度大的要求,ICE-3高速动车组采用了动力分散方式。
CRH3设计

二、参数计算
根据CRH3动车组技术性能,对其牵引传动 系统各单元进行验证性设计计算。通过逆向工 作,掌握牵引传动系统设计过程及元件选型, 设计计算牵引传动系统各单元电路参数
本文主要工作
• 对 CRH3 动车组牵引传动系统组成部分 进行了介绍,对 CRH3 交流传动控制与 牵引特性进行了分析。 • 对 CRH3 型动车组牵引传动系统中的变 流器主电路结构和各主要部件工作原理 进行了分析 。 • 对列车的牵引系统容量进行了计算,对 主要参数进行了验证性设计。 • 牵引变流器控制策略。
T3
D3T5
D5
uD
T4 T6 T2
M
D4
D6
D2
异步牵引电机
牵引电机可根据牵引 变流器输出三相交流电 的幅值和频率的变化, 来改变动车组的牵引力 和速度。 牵引电动机 CRH3 型动车组每个牵引变流器 驱动 4 个牵引电动机,电动机并 联,整列动车组 16 个牵引电动机 。牵引电机型号: ITB2019 ,额 定功率562 kW,最高转速 5 900 r/min。
牵引特性要求
高速列车牵引特性 一般分为2个区:从 启动到额定速度的 恒力矩区;从额定速 度到最高速度的恒 功率区。
四、牵引传动系统容量计算
设计思路
牵引传动系统中牵引变压器、牵引变流器、牵引 电机的容量计算是非常重要的设计依据。首先应根 据列车的牵引特性、再生制动特性的最大值求解出 列车轮缘的输出功率,其次根据列车阻力、牵引功 率、牵引力、启动加速度、列车启动平均加速度及 列车最高速度等进行列车牵引特性设计
目前、 CRH3 动车组在沪宁、沪杭高铁线 路及京津、武广城际铁路上运行。高速动 车组具有重量轻,粘着利用好,启动加速 度快等特点。
浅谈CRH3型高速动车组远程数据传输系统

控制 系统 可 以实 现 对整 个 列 车 的控 制 、 监 视 和诊 断 。列 车 在 运 行 过 程 中 ,其 状 态 信 息 和 报 警 信 息 都 会 在 列 车 WT B / MV B网络 上 进 行传 输 ,报 警 信 息会 显 示 在 列 车 司机 室显 示 屏 上 , 以便 供 司 控人 员 使 用 。状 态 信 息 主要 包 括通
2 . 2 工 作 电 源
信息 、 准 确 位 置及 故 障 信 息 。其 中 , 动 车 组 的基 本 状 态 信
息主要 包括速度 、 轴温 、 制动、 牵引、 车 门 等 安 全 相 关 信 息, 以及 卫 生 间 、 空 调 等 旅 客 服 务设 施 状 态 信 息 等 ; 位 置
C R H 3型 动车 组 采 用 D C l l 0 V直 流母 线 供 电 电 源 , 该 电 源分为两级 : 第 一级 电源 采 用 D C l 1 0 V / D C 2 4 V 电源 , 它 可 以 将 外 界 输 入 直 流 电 源 电 压 转 换 成 常 用 直 流 工 作 电压 ; 第 二 级 电 源采 用 各板 卡 电源 ( D C 2 4 V) , 它 采 用 隔 离 电源 模 块 将 电压 转 换 成 各 元 器 件 工作 需 要 的 电压 范 围 ,这 样 可 以 保 证 单 个 板 卡 的 电源 即使在 不 正 常状 态 下 也 不 会 影 响 其 它 板 卡 的工 作 ,可 以 有 效地 保 护 板 卡 和 快 速 定 位 板 卡 故 障 。C P U单 独 采 用 D C l l O V/D C 5 V 独立 板 卡 , 并 增 加 了 掉
CRH动车组概论

二、动车组车辆的编号 动车组中车辆的编号是由车种、技术序列代码、制造序列代码和编组顺位代码组成的。 编号形式:AA(A)BCCCDD 1、AA(A):车辆车种代码,用两个或三个大写英文字母表示,是车种名称的汉语拼音缩 写。其中ZY为一等座车,ZE为二等座车,RW为软卧车,CA为餐车(含酒吧车), ZEC为二等座车/餐车。特别的,对于CRH380型,还有SW,为商务车( 设置可躺式VIP座椅车),以及ZYG、ZEG、ZYT、ZET,分别为一等座车/观光车、 二等座车/观光车、一等座车/特等座车、二等座车/特等座车。 2、B:技术序列代码。编写规则与动车组的编号规则相同。特别的,对于CRH380型和 CRH6型,其技术序列代码在车辆编号中分别用6和4代替。 3、CCC:制造序列代码。编写规则与动车组的编号规则相同。 4、DD:编组顺位代码,用两位数字表示,由1位头车至2位头车的代码为01,02,03……00。
一、动车组的编号 1、第一代动车组的编号 动车组编号形式:CRHX-YYYZ 其中,下标x为技术序列代码,用一位数字表示;YYY为制造序列代码,用三位阿拉伯数字表 示;Z为型号系列代码,用一位大写英文字母表示。 ①x:有1、2、3、5四种。 1代表青岛BST公司引进加拿大庞巴迪公司的技术制造生产的动车组; 2代表四方机车车辆股份有限公司引进日本川崎重工的技术制造生产的动车组; 3代表唐山机车车辆厂引进德国西门子公司生产的动车组; 5代表长春轨道客车股份有限公司引进法国阿尔斯通公司的技术制造生产的动车组。 ②YYY:各型号动车组按照技术序列单独编排,顺序由001~999依次编排。 ③Z:按照动车组的速度等级、车种确定。现有A、B、C、E四种。 A表示列车运行时速200km/h,8辆编组,座车。 B表示列车运行时速200km/h,16辆编组,座车。 C表示列车运行时速300km/h,8辆编组,座车。 E表示列车运行时速200km/h,16辆编组,卧铺车。 此处应说明的是,不是每种动车组都有A、B、C、E四种型号。 如:CRH1-036A 表示由青岛BST公司生产的动车组,制造顺序为第36列,运行时速200km/h, 8辆编组的座车。目前,该车配属成都铁路局,担任成灌线上D6189、D6118等车次的 运行任务。
CRH3传动系统分析
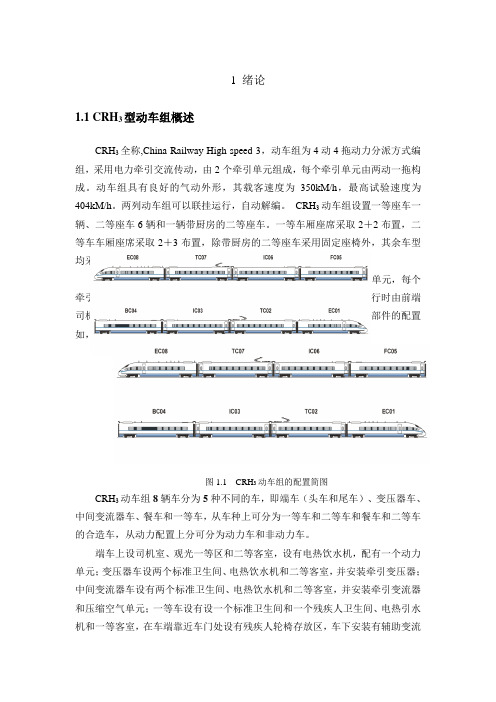
1 绪论1.1 CRH3型动车组概述CRH3全称,China Railway High speed 3,动车组为4动4拖动力分派方式编组,采用电力牵引交流传动,由2个牵引单元组成,每个牵引单元由两动一拖构成。
动车组具有良好的气动外形,其载客速度为350kM/h,最高试验速度为404kM/h。
两列动车组可以联挂运行,自动解编。
CRH3动车组设置一等座车一辆、二等座车6辆和一辆带厨房的二等座车。
一等车厢座席采取2+2布置,二等车车厢座席采取2+3布置,除带厨房的二等座车采用固定座椅外,其余车型均采用了可旋转座椅,全车定员557人。
CRH3动车组为8辆编组的交流传动的电动车组,分为两个牵引单元,每个牵引单元又包括两个动力单元。
两端为带司机室控制车,列车正常运行时由前端司机室操纵。
两列动车组可以连挂在一起运行。
动车组的配置和主要部件的配置如,图1.1所示。
图1.1 CRH3动车组的配置简图CRH3动车组8辆车分为5种不同的车,即端车(头车和尾车)、变压器车、中间变流器车、餐车和一等车,从车种上可分为一等车和二等车和餐车和二等车的合造车,从动力配置上分可分为动力车和非动力车。
端车上设司机室、观光一等区和二等客室,设有电热饮水机,配有一个动力单元;变压器车设两个标准卫生间、电热饮水机和二等客室,并安装牵引变压器;中间变流器车设有两个标准卫生间、电热饮水机和二等客室,并安装牵引变流器和压缩空气单元;一等车设有设一个标准卫生间和一个残疾人卫生间、电热引水机和一等客室,在车端靠近车门处设有残疾人轮椅存放区,车下安装有辅助变流器;餐车和二等车的合造车,设有厨房、吧台、就餐区、多功能乘务员室和二等客室,车下设有辅助变流器。
动车组外形一致,车顶空调和电气设备设有导流罩,车下设有封闭的设备舱,两端设有车钩导流罩,采用流线形设计,降低空气动力学阻力和噪声,为保证动力学性能,后续列将加装车辆间橡胶风档,进一步减少空气动力1.2 CRH3型动车组技术参数(1)最大速度:380Km/h电源电压:27.5 kVAC 变2×1 550 VAC 进变流器输入(变化范围:1 085 VAC~1 922 VAC)低压电源:110 VDC 电源(变化范围:77 VDC~138 VDC)辅助电源:三相400 V AC 50 Hz 160 kVA(2)牵引与制动最大加速度:启动加速度为0.5 m/s2,0~200 km/h平均加速度0.38 m/s2最大冲动率:0.75 m/s3车轮直径:920 mm(全新)~830 mm(全磨损)减速箱传动比:2.788减速箱的机械损耗:3%(最大估计值)紧急制动气电混合制动300 km/h~200 km/h 减速度a3=0.9265 m/s2;200 km/h~80 km/h减速度a2=1.1364 m/s2;80 km/h~0 km/h 减速度a1=1.048m/s2。
crh3详细参数

中国引进Siemens AG 技术(部分进口)生产的时速350KM动力分散式动车组,以西门子公司制造的ICE3为原车,合作厂是北车唐山轨道客车有限公司。
2008年3月份,国内第一列国产化350km/h动车组将完成总体组装,首批3列动车组和由西门子公司制造的2列原型车将于2008年北京奥运会召开前交付京津高铁使用。
CRH3动车组基于西门子高速列车Velaro平台。
Velaro平台的优势在于其动力分布式牵引技术,所有的设备分布于列车底部,因此列车可以比其它同样长度列车多容纳25%的座位。
车辆所有部件设计统一,低轴重使基础设施的维修成本更低。
ICE 3为八节车厢之电联车,包括三节头等车厢、四节普通车厢及一节餐车,车厢比ICE 1和ICE 2之长度稍短、宽度稍窄,全长200.67m,共可承载380名旅客(四电源系统)或391名旅客(单电源系统)。
八个动力转向架的输出马力达8800kW;亦可作两组列车联挂营运,总长达401.34m。
[编辑本段]详细技术资料编组形式为,4M4T,可两列重联;动力配置:2(2M+1T)+2T;编组重量:380t;编组长度:200.67m;总牵引功率:8800kW;动轴数:16;单电机功率:550kW;吨均功率:21.05kW/t;运营时速:350km/h;试验速度:≤400km/h;转向架轴重:15t;车辆宽度:2.950m;车辆高度:3.890m;中间车长度:24.775m;头车长度:25.675m;转向架轴距:2.500m;转向架中心距:17.375m;辅助供电制式:3相440V 80Hz,DC110V;列车控制网络系统:车载分布式计算机网络系统。
有关CRH3的最新消息2008年4月11日,首列国产时速350公里CRH3“和谐号”动车组在中国北车集团唐山轨道客车有限责任公司下线,标志着中国铁路技术装备现代化取得又一重大成果,我国由此成为世界上仅有的几个能制造时速350公里高速铁路移动装备的国家之一。
CRH3型动车组过分相控制
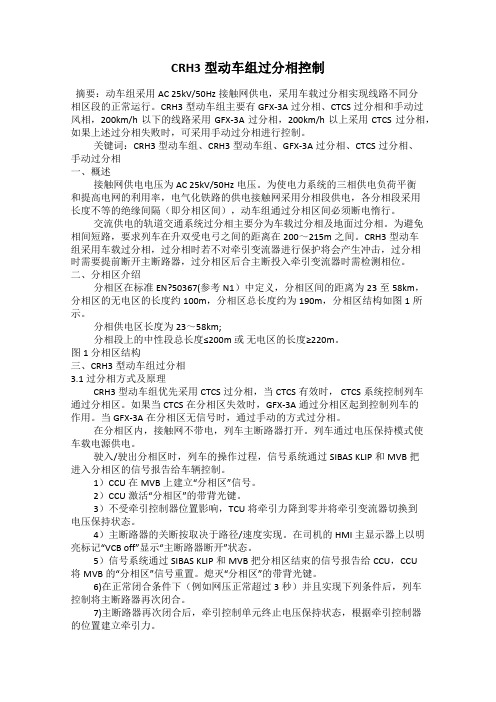
CRH3型动车组过分相控制摘要:动车组采用AC 25kV/50Hz接触网供电,采用车载过分相实现线路不同分相区段的正常运行。
CRH3型动车组主要有GFX-3A过分相、CTCS过分相和手动过风相,200km/h以下的线路采用GFX-3A过分相,200km/h以上采用CTCS过分相,如果上述过分相失败时,可采用手动过分相进行控制。
关键词:CRH3型动车组、CRH3型动车组、GFX-3A过分相、CTCS过分相、手动过分相一、概述接触网供电电压为AC 25kV/50Hz电压。
为使电力系统的三相供电负荷平衡和提高电网的利用率,电气化铁路的供电接触网采用分相段供电,各分相段采用长度不等的绝缘间隔(即分相区间),动车组通过分相区间必须断电惰行。
交流供电的轨道交通系统过分相主要分为车载过分相及地面过分相。
为避免相间短路,要求列车在升双受电弓之间的距离在200~215m之间。
CRH3型动车组采用车载过分相,过分相时若不对牵引变流器进行保护将会产生冲击,过分相时需要提前断开主断路器,过分相区后合主断投入牵引变流器时需检测相位。
二、分相区介绍分相区在标准EN?50367(参考N1)中定义,分相区间的距离为23至58km,分相区的无电区的长度约100m,分相区总长度约为190m,分相区结构如图1所示。
分相供电区长度为23~58km;分相段上的中性段总长度≤200m 或无电区的长度≥220m。
图1 分相区结构三、CRH3型动车组过分相3.1过分相方式及原理CRH3型动车组优先采用CTCS过分相,当CTCS有效时, CTCS系统控制列车通过分相区。
如果当CTCS在分相区失效时,GFX-3A通过分相区起到控制列车的作用。
当GFX-3A在分相区无信号时,通过手动的方式过分相。
在分相区内,接触网不带电,列车主断路器打开。
列车通过电压保持模式使车载电源供电。
驶入/驶出分相区时,列车的操作过程,信号系统通过SIBAS KLIP和MVB把进入分相区的信号报告给车辆控制。
CRH3动车组介绍(1)

一 CRH3动车组运行情况
二 CRH3动车组主要技术特点 三 CRH3动车组运用维护
四 应急故障处理
一. CRH3动车组概述
1. CRH3原型车概述
CRH3动车组的原型车是Velaro E动车组。它是 以德国铁路股份公司(DB AG)的ICE3为原型车开 发研制的,最高运行速度达350km/h,用于西班牙新 建的马德里—巴塞罗那高速铁路,于2007年投入运 用。 由于ICE系列动车组是德国国铁的注册商标,所 以西门子公司为西班牙提供的动车组定名为Velaro E, Velaro E是西门子公司具有自主知识产权的品牌。
推挽式列车演变
改革
Velaro RUS
Distributed traction system (EMU)/分散型 牵引系统 (电力动车组)
Velaro E ICE 3
ICE 2 ICE® V ICE 1
Power unit (Push-Pull PP) 动力单元 (推挽式)
1985
1991
1995
2000
18
按欧洲联运技术条件(TSI)进行防火结构设计,发生火灾时, 列车能以80km/h的速度运行15分钟,能够使列车及时开出隧 道、高架铁路及其他禁止停车的危险区; 具有完备的车载技术诊断系统,对各种功能设备故障的检测、 预报、排除的水平较高,并方便地面检修,具有良好的运用检 修体系,运用效率高; 各种旅行必备技术设施齐全,且车辆档次高,堪称世界最高档 旅客列车。根据不同的旅客需求,车上设3种旅客坐席,264个 普通坐席,103个舒适坐席,37个俱乐部会员坐席。在司机室 后部设有会议室和VIP间,与司机室之间是玻璃墙,可以看到 司机的操纵和透过前窗玻璃观看景色。四种厨房提供高质量的 餐饮服务:自助餐厅、舒适级坐席旅客的餐厅、37个俱乐部会 员的主餐厅和普通旅客的餐厅。 采用模块化设计,在达到了较高的标准化、系列化水平的前提 下,具有较大的灵活性,既方便制造、组装、运用检修,又便 于满足不同的用户需要。
探讨CRH3型动车组制动技术的原理和运用

探讨 CRH3 型动车组制动技术的原理和运用摘要:制动控制功能是高速动车组的核心技术之一,制动控制功能可以大致分为两种,即常用制动控制与紧急制动控制,主要针对于不同情况下采取的行驶方案而选择,而动车组在使用过程中通常也伴随着各种故障的问题发生,所以关于动车组的制动控制功能,必须有一个系统性的研究与调查,本文以CRH3型车的制动控制系统的原理作为分析案例,对其制动控制系统的运用原理以及结构组成进行分析。
关键词:制动系统,CRH3型号动车,动车组控制一、制动原理分析CRH3型号动车的动车组分为两类,为长编组与短编组,最大的区别在于组数上存在着很大的不同,但是两者都依赖制动控制系统,而系统的控制则是由微型计算机负责操作,对于动车组的操作方式一般为直通式,由此可以看出,微型计算机在动车方面的应用十分广泛,不仅仅是针对于CRH3型号动车,相关的轨道类交通工具也有提供,尤其针对于高速铁路应用效果最佳。
动车的制动控制单元以车厢数作为基本标准,一般为四节车厢,而前端位置的两节车厢由动力系统负责控制,后端两节车厢则由前端两节车厢的动力带着拖动,每个自动控制单元的都具有信号接受功能,过程大致可以理解为由微型计算机发布指令(具有一定的自动性),在微型计算机发布指令的过程中,信息会被转为可供系统接收的模拟信号,信号的格式也会有所转换,其学术用语称为PWM。
CRH3型号动车的制动系统分为两类,即电制动与气制动,两者最明显的区别在于所使用的动力来源不同,电制动采用的是直通电的方式,直通电的方式是最为常见的制动方式,而气制动则是在特殊情况下使用的制动辅助系统,常见在动车组遭遇质量故障时启动,但是是采用分配阀进行制动的。
其实电制动与气制动虽然采用的情况不同,但是原理上却是一致的,都需要利用制动缸来产生压力进行制动,如果动车在运行过程中需要紧急制动的话,制动系统会使用止回阀将内部气体进行压缩形成动力,进而帮助动车执行制动,而CRH3型号动车的车速在高达200Km/h以上的时候,其车轮在运行过程中极大概率会出现黏着现象,这个时候就需要制动系统将速度降下来,并且通过中继阀对止回阀所产生的压力进行控制。
浅谈CRH3型动车组全功能模拟驾驶仿真系统及其教学应用

浅谈CRH3型动车组全功能模拟驾驶仿真系统及其教学应用摘要:随着铁路“高铁时代”的到来,高速动车组已经在各条客运专线上风驰电掣,高速铁路后备人才队伍建设工作已显得更为重要。
作为培养高速铁路专业人才的高职院校,针对高铁运输行业各个部门的特点,结合CRH3型动车组全功能模拟驾驶仿真系统更好的开展教学,本文通过对动车组全功能模拟驾驶仿真系统及其教学应用的现状分析,有效地解决了当前培养学生中存在的问题,对于高速铁路其他专业人才开发具有一定的借鉴和参考作用。
关键词:动车组仿真模拟实践教学1、背景武汉铁路职pCRH3型动车组全功能模拟驾驶仿真系统是用于对CRH3型动车组列车司机、乘务人员、检修人员、调度人员进行层次化和系统化培训的一种多功能综合性仿真培训系统。
其中全功能模拟驾驶仿真系统能够真实的模拟CRH3型动车组列车在各类运行环境和工况下的驾驶操纵、运行特性、运行状况和视听环境以及CRH3型动车组列车运行中的各类故障和突发事件,能够有效地对CRH3型动车组列车司机进行列车操纵能力和列车运行中故障与突发事件应急处理能力的培训和考核。
调度集中指挥控制仿真系统能够模拟真实的调度集中系统的所有的调度监督功能,能够有效地对中心调度人员与车站值班员进行列车运营控制的培训和考核。
2.1 系统所采用操作系统与软件开发平台为确保系统稳定性和合理性,系统采用成熟稳定的操作系统与软件开发平台:(1)操作系统:1)系统主要计算机系统包括视景控制计算机、系统服务器与教员计算机采用Microsoft windows XP操作系统;2)系统工业级平板电脑采用Microsoft Windows XPE操作系统。
(2)软件开发平台:1)Embedded Visual C++;2)Microsoft Visual C++ 6.0 (VC6)。
(3)视景开发平台:Maya 7.01。
(4)数据库平台:Microsoft Sql Server 2005以上操作系统与软件开发平台均在开发公司的模拟驾驶系统中得到过成功的应用和验证。
CRH动车组驱动装置的控制策略与性能评估

CRH动车组驱动装置的控制策略与性能评估CRH动车组是中国铁路系统中的一种列车,并且驱动装置对于其性能来说至关重要。
在这篇文章中,我们将讨论CRH动车组驱动装置的控制策略以及对性能的评估。
控制策略CRH动车组的驱动装置采用的是电力机车驱动系统,其控制策略主要包括牵引控制、再生制动控制和牵引再生切换控制。
牵引控制主要是根据列车速度和牵引力要求,控制逆变器输出功率,从而实现列车的加速和匀速运行。
再生制动控制则是利用逆变器反转电机,将电动机作为发电机运行,使动车组的制动力实现再生。
而牵引再生切换控制则是根据列车运行状态和减速度要求,实现牵引和再生制动之间的平滑切换。
性能评估对于CRH动车组驱动装置的性能评估,主要包括牵引性能、制动性能、能耗性能和可靠性。
牵引性能是指驱动装置在正常运行速度范围内实现列车加速和匀速运行所需的性能指标。
制动性能则是指在列车制动或再生制动过程中,具有较好的制动力和制动距离控制能力。
能耗性能主要是指在实现列车运行任务的过程中,具有较低的能耗水平,从而提高动车组的运行经济性。
可靠性是指驱动装置在长时间运行过程中,具有良好的稳定性和故障自愈性,确保列车的安全运行。
综合评估基于以上控制策略和性能评估指标,目前CRH动车组的驱动装置已经取得了一定的成绩。
控制策略的不断优化和性能指标的持续提升,使得CRH动车组在列车牵引和制动过程中具有更好的控制精度和运行平稳性。
同时,CRH动车组的能耗水平和可靠性指标也在不断改善,为广大乘客提供更加舒适和安全的出行环境。
总结通过对CRH动车组驱动装置的控制策略和性能评估的讨论,可以得出结论:CRH动车组在驱动技术方面已经取得了显著的进步,不仅在牵引性能和制动性能上表现出色,而且在能耗性能和可靠性方面也有着显著的提升。
相信随着技术的不断革新和发展,CRH动车组的驱动装置将会不断提升,为乘客提供更加安全、舒适和高效的出行体验。
CRH型电动车组制动距离计算与监控装置制动模式曲线设计

减速度 a″。
纯制动力引发的减速度 a′用下式表达〔3〕
a′=
b·g·10- 3 1 +γ
式中 b 为列车单位制动力 , N/ kN ; g 为重力加速度 ,
g≈9181 m/ s2 ; γ为列车回转质量系数 。
阻力引发的减速度 a″用下式表达〔3〕
a″=
( w0 +
ij) ·g·10 - 3 1 +γ
大影响 , 但仔细推敲会发现 , 由此反推出回转质量系
数 γ为负值 ( - 01019) , 这实际上不存在 , 在理论上
不严谨 。
计入阻力引发的减速度并统一单位制 , 在任意坡 道上的有效制动距离基于制动减速度的计算公式如下
∑ Se
=
2
1 ×3162
v21 - v22
a′+ 01008 9 ( w0 + ij)
113 CRH 型电动车组单位基本阻力 根据文献 〔1〕提供的资料 , CRH 型电动车组的
单位基本阻力换算成统一单位制后 , 公式如下 CRH1 型 w0 = 1112 +01005 42 v +01000 146 v2 N/ kN (1) CRH2 型
第七章 CRH3列车网络控制系统

• 这些信息主要是:卫生间的错误信息、净水箱空故障 信息、污水箱满95%故障信息、卫生设施的加热系统 温度过高、紧急呼叫信息。
• 一个MVB网段内采用构架式的网络结构,即每辆车形 成一个MVB分支网通过中继器与一牵引单元的MVB主干 网相连接,这种结构的优点是一个MVB分支网的故障 时不致影响其它车辆的MVB分支网,在端车上由于冗 余的原因有两个MVB分段,分别通过两个中继器接入 整个MVB网段,在每个分段的两端都接有终端电阻 (120欧姆) 。
七、电池充电机控制单元
• CRH3动车组上共有两个电池充电机,分 别位于餐车和一等车,如图7-9所示, 电池充电机控制系统就位于充电机中。 电池充电机的输入电源为3相 AC440 V/60Hz,输出为直流110V,是动车组 110V负载的供电电源。它有两个主要控 制模块,一个是充电机的核心控制模 块,同时还负责和车辆总线MVB进行通 信,另一个是主要用于充电的功率模 块。充电机的基本结构入图7-10所示。
• 每个牵引单元内的MVB网段均设有两个互为冗余的中央控制单元 CCU(以下简称CCU),除此之外在MVB网段上还有牵引控制单元 TCU、制动控制单元BCU、辅助控制单元ACU、以及充电机单元 BC、空调控制单元HVAC、门控制单元、旅客信息中央控制器 PIS—STC、人机显示接口MMI、分布式输入输出站SIBAS KLIP STATION (SKS) 和紧凑式输入输出站MVB COMPACT IO 等。
CRH3型动车组解析

CRH3C型电力动车组采用动力分布式,每列8节编组,4动4拖 (T+M+M+T+T+M+M+T),最高运营速度达350km/h。列车设有 一等座车(ZY)1辆、二等座车(ZE)6辆和带酒吧的二等座车 (ZEC)一辆。其中一等车内座椅2+2方式布置,二等车以2+3方式 布置。除了带酒吧的二等座车外,其他车厢所有座位均能旋转。首 尾的头车设有司机室,可双向驾驶,一等车和酒吧车在最中间,全 列车定员557人。头车长度20.7m,中间车长度25m,车体宽度3.3m, 车体高度3.89m,列车总长200.67m,适应站台高度1.25m。
车钩三态
三态作用原理 为了实现车钩连挂或摘钩, 使车辆连接或分离,车钩具有 闭锁、和全开三态作用位置。 闭锁位置 车辆连挂后,两个车钩必须处 于闭锁位置才能传递牵引力。 此时锁铁处于最低位置,锁铁 后坐锁面坐落在钩舌推铁锁座 上,钩舌尾部受锁铁阻挡,而 锁铁的另一侧受钩腔内壁阻。
开锁位置 两连挂着的车辆欲分开时,必须有一个车钩处于开锁位置。提起车钩 提杆,下锁销转轴转动带动锁铁上升到一定的高度,放下车钩提杆, 锁铁开锁坐锁面停留在钩舌推铁锁座上。此时钩舌不能自动打开,如 果钩舌受到牵引力就能绕钩舌销转动。车钩处于开锁位置。
.
• • • • • • • •
CRH3型动车装配三种车钩,分别为; 自动车钩:每节车头(EC01/ECO8)的前舱均有一个左右前车罩和一个 左右自动车钩。 半永久车钩:每辆头车的前端和每辆中间车辆的车端配有半永久性车钩, 其作用为吸收超出规定的分离力(如出现严重冲击和碰撞)时耗散能量,以 保安全。 过度车钩:每个动车组在头等车(FC05)的地板下方位置存放一个备 用紧急救援车钩,用以其他机车牵引/拖拽CRH3车组。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上,则认为该通道平均值检查不合格 ;超差检查中判断
某 路 转 速 信 号是 否 超 差 要结 合 其 转 速值 为 参考 检 查其 余几 路 ( 通道l 为
参考 ,检 查通 道 2 、3 、4 ;通 道 2 为 参 考 ,检 查通 道 3 、
的计算 策略 来确 保行 车安全 。
l 速 度信 号
1 . 1 速度 信号 的来 源 速度 信 号有 8 个通 道 来源 ,这8 个 通道 又 分为 三类 信 号 :原始 速度 信 号、 备用速 度信 号 、附加 速度 信 号 。
童 崮 ⑨ 宝
~ ◇
图2 原始 数据 检 查流程
来 的实 际速度 。
附加速 度 信号 共 有2 个通 道 ,通 道 7 是来 自T C U 1 计算
的四 个动 轴 的平 均转 速 ,通道 8 是 相 邻 牵 引单 元 的 平均 转速 。
1 . 2 速度 信号 的评 估 原始 速 度信 号 十分 重 要 ,是进 行 列车 行 驶里 程 、加
( 1 . 唐 山轨道客 车有 限责 任公 司产 品技术研 究 中心; 2 . 唐 山轨道客 车有 限责任 公 司资源管理部 , 河北 唐 山 0 6 3 0 3 5 )
摘要 :文章 介绍 了C R H 3 型动 车组速度 里程 计算及 控制 策略 ,提 出C R H 3 型车 的速 度是 通过 8 个 通道 采集 的速 度信 号 经过一 定 的评 估 、 筛选 以及 合 理 的选 择 方案得 出的 里 程 的计 算依赖 于选 择 出的速 度 ,通过 速度 和 已知 的
原始速度信号共有4 个通道如图1 所示,分别是动车
的T C U 和 拖 车 的B C U 通 过L G 速度 传 感器采 集 参考 轴转 速 得
到的。
宴 ⑨
备用 速 度 信 号共 有 2 个 通 道 ,通 道 5 是A T P 速 度 传 感
器 采集 的速度 信 号,通 道6 是B C U 根 据参 考 轴转 速计 算 出
文献标识 码 :A
文章编号 :1 0 0 9 — 2 3 7 4( 2 0 1 4 ) 2 6 - 0 0 9 4 — 0 3
随着 轨道 装备 技 术 的不 断发 展 ,轨 道列 车 的速 度在 不 断 提升 。在 如此 高 的速度 下要保 证列 车 的行 车安 全 , 速 度 的计算 及控 制 尤为 重要 。C R H 3 型车 采 取多 通道 冗余
煮 熟 嫠 煮
( C u m u l a t i v N e O t y . N 2 O 6 . 2 0 1 4 3 0 5)
.
基于蓝 牙技术和S I M9 0 8 模块 的水泥混凝 土车辆 运输 管理系统
谭林逸 ,涂 治军 ,廖 幸
( 湖 南省 交通科 学研 究 院,湖 南 长 沙 4 1 0 0 1 5 )
轮径计算出列车行使里程 。此外,通过选择 出的速度还能计算出列车行使过程 中的加速度 ,进 而判 断列车是
否发 生滑行或打 滑 ,得 出列车 的速度 品质 信 号。 关键词 :C R H 3 ;速度 里程 ;加速 度 ;列车滑行 ;列 车打滑 ;控 制策 略
中图分 类号 : T M 9 2 2
摘 要 :水 泥混凝 土运输 车 辆缺 乏有效 监 管 ,需要 实现数 字化 、信 息化 管理 。 文章提 出了一种 基 于蓝 牙技 术和 s I M 9 0 8 模 块 的水 泥混凝 土车 辆运 输管 理 系统 ,在 分析 了水泥 混凝 土运 输 车辆 管理 系统 的基础 上 ,设 计 了 系统 整体 框 架。采 用以C S R 公 司 的主流蓝 牙 芯片 ,通 过S I M 9 0 8 模 块 实时获取 车辆运 输轨迹 并将 这些信 息传 输到 远程
。 /
『 - - 一
f }
[
其 中 ,转速 的零 值检 查 主要 从 编码 器零 位 判 定和 编
码 器数 据接 收 等方 面进 行 评估 ,在 所 有通 道 中 的转速 信
图 1 原 始 通 道 信 亏
号 中 只有一 个转 速 信号 等 于零 或者 大 于零 ,则 认 为该 转 速信 号 的零 不 正常 ;转 速最 大 值检 查 的 目的是 检测 转 速 信 号是 否超 过最 大 限定 值 :转 速变 化率 检 查是 为 了检 测 转速 信 号跳 变是 否超 限 ,检 测 过程 比较 复 杂 ,检测 的原 则是 原始 通道 这 一 次输 入 的转速 与 上一 次输 入 的转 速进 行 比较 ,如 果转 速变 化 超过 1 . 5 转/ 秒 ,则 认为 转速 发 生 了一 次跳 变 ,在 l O m i n 之 内跳 变 的次数 超 过5 次 ,则 该认 为该 通道 的转 速 变化 率检 查 不合 格 ;平 均值 检 查是 利 用 当 前 通 道 转 速 与 平 均 转 速 比较 ,如 果 差 值 不 超 过 公差 则认 为 平均 值 检 查 正 常 ,如 果 超过 公 差 且 持续 6 0 0 m s 以
2 0 1 4 年第2 6 期
( 总 第 3 0 5 期 )
黎 鸯 熟 尊
( C u m u l a t i v N e o l y . N 2 O 6 . 2 0 1 4 3 0 5)
.
浅析C R H 3 型动车组速度里程计算及控 制策略
穆俊斌 ,王 静 ,刘 超 ,孙景辉 ,冀 云
复杂 ,每 一 个 原始 信 号 都 要经 过 5 步 检 查来 判 定 信 号 的
合理 性 ,这5 步检 查 的流程 如 图2 所示 :
4 ;通道 3 为参考 ,检 查通 道4 )。 备 用 速度 信 号 的合理 性 检查 较 原始 通 道简 单 ,分 为
.
.
9 4.
2 0 1 4 年第2 6 期 ( 总第3 0 5 期)
