全国青少年机器人技术等级考试 四级实操2018-12.doc
全国青少年机器人等级考试四级

//必备函数 在程序运行时,往复执行,通常放置主执行程序 //舵机库功能函数,该函数功能是设定舵机旋转角度,角度范围0°-180°
02
超声波的介绍
Goodmaker创客工作室
器件介绍
超声波传感器是利用超声波的特性研制而成的传感器。超声波接收到触发信号后, 模块自动发出8个40kHz的方波,同时开始计时并自动检测是否有信号返回,通 过记录超声波从开始发送到接收到回波的时间间隔,来判断前方障碍物的距离。
编码的红外波。红外遥控器有多种编码方式,最常见的红外遥控器大多使用NEC编码。
红外接收模块:红外接收模块由红外接收头组成,红外接收头是一个一体
化的红外接收电路,包含了红外监测二极管、放大器、滤波器、积分电路、 比较器等。其功能是接收红外信号并还原成发射端的波形信号。红外接收器 接收38kHz左右的红外信号。
//将results的值以十六进制输出
switch(){ case 0xFFA25D;
//如果接收到信号是遥控器的数字1,点亮led灯
{
digitalWrite(ledPin1,HIGH);
break;
} case 0xFF629D;
//如果接收到信号是遥控器的数字2,熄灭led灯Pin1,LOW);
void setup(){ pinMode(ledPin,OUTPUT); irRecv.enableIRIn(); Serial.begin(9600);
}
//必备函数 只执行一次,通常放置程序的初始化语
//启动红外接收功能 enableIRln()红外类库的成员函数:功能是初始化接收器 //初始化串口波特率为9600
示例程序
注释说明:红色本节需掌握,蓝色机器人考级4级基础知识,黑色示例说明
全国青少年机器人技术等级考试四级实操2018-09

本程序为18年9月份四级实操考试示例程序仅供参考 程序电机接D1和D2端口,超声波接D4端口 程序中用串口打印来显示超声波测量距离
*/
int D1=6;〃端口D1主IO引脚
int D1f=5;〃端口D1辅助IO引脚
int D2=10;〃端口D2主IO引脚
int D2f=9;〃端口D2辅助IO引脚
自动跟随小车
1、主题:跟随小车器件:三四级等级考试Fra bibliotek件要求:
1、现场搭建小车。
2、小车从发车线出发,向前移动,距离前方障碍物10厘米处暂停。
3、移动障碍物,随着障碍物的移动,小车与障碍物间的距离始终保持10厘米。
4、通过超声波传感器进行距离检测。
5、程序编写采用C语言,不得使用图形化软件编写。
6、考试结束,考生将代码转贝上交。 说明:
int D3=11;〃端口D3主IO引脚
int D3f=3;〃端口D3辅助IO引脚
int D4=13;〃端口D4主IO引脚
int D4f=12;〃端口D4辅助IO引脚
/*
int D5=2;〃端口D5主IO引脚
int D5f=8;〃端口D5辅助IO引脚
int D6=1;〃端口D6主IO引脚
int D6f=0;〃端口D6辅助IO引脚
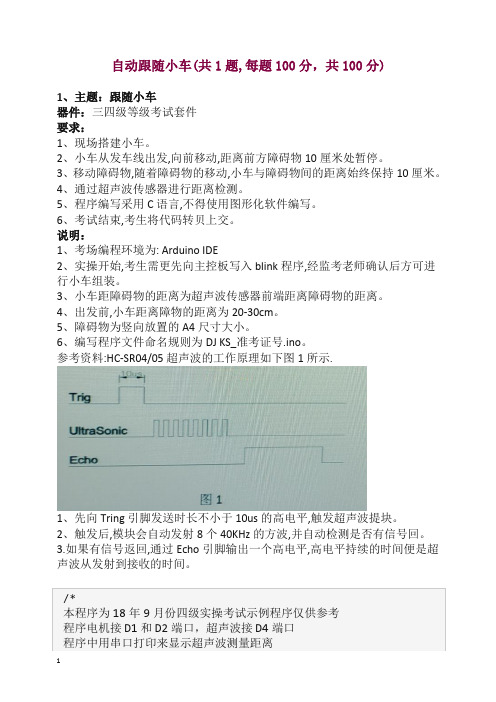
参考资料:HC-SR04/05超声波的工作原理如下图1所示
声,牛
Trig|
UltraSonic
—'1 n
!mlj ;lj
Echo
图1
1、先向Tring引脚发送时长不小于10us的高电平,触发超声波提块。
2、触发后,模块会自动发射8个40KHz的方波,并自动检测是否有信号回。
3、如果有信号返回,通过Echo引脚输出一个高电平,高电平持续的时间便是超声 波从发射到接收的时间。
机器人等级考试4级第四章

irrecv.resume();
}
}
//(3)小车动作控制函数与上一个项目相同
4.1.4.2程序说明
(1)红外传感器按键对应不同的码值;
(2)当按遥控器的数字键2加速和数字键1减速时,当前的motorSpeed增加或者减少 一个speedStep。if语句的含义是当速度达到最大或最小值时,不再发生变化。
第四章 红外遥控智能小车
4.1红外遥控智能小车
4
红外遥控器
按键
功能
+
前进
-
后退
<<
左转
>>
右转
OK
停止
1
减速
2
加速
3
全速
4-1红外遥控智能小车功能索引
4.1.2
4.1.3
红外接收传感器连接3号端口
4.1.4
4.1.4.1程序编写
#include <IRremote.h>
const int motor1LeftPin = 0; //AIN1连接引脚0
const int motor1RightPin = 1; //AIN2连接引脚1
const int motor1PWMPin = 6; //PWA连接引脚6
const int motor2LeftPin = 2; //BIN1连接引脚2
const int motor2RightPin = 4; //BIN2连接引脚4
pinMode(motor1RightPin,OUTPUT);
pinMode(motor1PWMPin,OUTPUT);
全国青少年机器人技术等级考试 四级实操2018-09.doc
自动跟随小车(共1题,每题100分,共100分)1、主题:跟随小车器件:三四级等级考试套件要求:1、现场搭建小车。
2、小车从发车线出发,向前移动,距离前方障碍物10厘米处暂停。
3、移动障碍物,随着障碍物的移动,小车与障碍物间的距离始终保持10厘米。
4、通过超声波传感器进行距离检测。
5、程序编写采用C语言,不得使用图形化软件编写。
6、考试结束,考生将代码转贝上交。
说明:1、考场编程环境为: Arduino IDE2、实操开始,考生需更先向主控板写入 blink程序,经监考老师确认后方可进行小车组装。
3、小车距障碍物的距离为超声波传感器前端距离障碍物的距离。
4、出发前,小车距离障物的距离为20-30cm。
5、障碍物为竖向放置的A4尺寸大小。
6、编写程序文件命名规则为DJ KS_准考证号.ino。
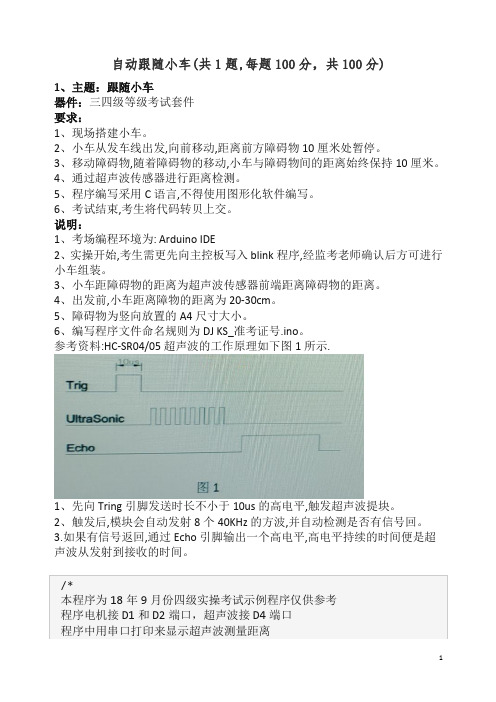
参考资料:HC-SR04/05超声波的工作原理如下图1所示.1、先向Tring引脚发送时长不小于10us的高电平,触发超声波提块。
2、触发后,模块会自动发射8个40KHz的方波,并自动检测是否有信号回。
3.如果有信号返回,通过Echo引脚输出一个高电平,高电平持续的时间便是超声波从发射到接收的时间。
四级考察的内容是对三级学习内容的综合考察,并且增加了对代码编程和结构搭建的要求。
在图形化里面的编译按钮的左边有一个按钮,通过这个按钮是可以直接打开代码arduino IDE来进行代码编辑的。
另外zblockly里也内置了一套arduino IDE,可以直接用来进行代码编程。
也有等级考试相关的代码示例程序。
3。
答案+解析(2018.12机器人等级考试三级理论真题)

全国青少年机器人技术等级考试(2018年12月8日)附答案+详细解析一、单选题(共30题,每题2分,共60分)1. 正常情况下,程序中,当引脚4输入的电压为2.5V时,串口监视器的返回值是?A. 0B. 1C. 512D. 不确定参考答案:D解析:数字电路高电平的范围是:3.5~5.5V,数值为1;低电平电压范围是:-0.5~1.5V,数值为0,题中输入的2.5不在这两个范围内,故选D。
2. 程序中的低电平一般用()来表示。
A. 0B. 1C. 0或1D. 2参考答案:A解析:据上一题解析,选A。
3.运行下图程序,串口监视器窗口输出数值为?A. 2B. 3C. 6D. 18参考答案:C解析:符号“%”是取余数,i=3,j=6,6除以3取余数为0,条件为0,不成立,所以打印输出变量j,输出数值为6,故选C。
4. 当光照射光敏电阻时,光敏电阻的阻值?A. 变大B. 变小C. 不变D. 没有规律参考答案:B解析:光敏电阻根据光照强度改变其电阻,光线越强电阻越小,反之越大。
5. 两节普通干电池并联后的电压为?A. 1.5VB. 3VC. 6VD. 36V参考答案:A解析:并联电路各支路电压相同,输出电压不变,仍为1.5V。
6. Arduino UNO或Nano主控板,通过电位器旋转控制LED的亮度,程序运行下列表达正确的是?A. 电位器连接在3引脚,LED灯连接在A0引脚。
B. 电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭一次。
C. 电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭四次。
D. 电位器从一端旋转至另外一端时,LED灯的状态只有亮灭两种状态。
参考答案:C解析:电位器输入数值范围为:0-1023,模拟输出数值为:0-255(0为熄灭,255最亮),从256开始相当于又从0开始到255变化,1023/255=4,所以选C。
7. 下列模块中,属于逻辑运算符的是?A. B.C. D.参考答案:C解析:C为逻辑与运算。
2024年3月青少年机器人技术等级考试实际操作试卷四级真题

2024年3月青少年机器人技术等级考试实际操作试卷四级真题分数:100 题数:1一、实操试题(共1题,共100分)。
1.主题:红外遥控灯。
器件:Atmega328P主控板1块,红外遥控器1个,红外接收模块1个,LED模块2个(LED_A和LED_B),及相应辅件。
以上模块也可使用分立器件结合面包板搭建。
任务要求:通过多次点击红外遥控器的按键1,实现LED灯不同状态的循环显示,具体说明如下:(1)初始状态:LED_A和LED_B均处于熄灭状态;(2)第1次按下按键1后,LED_A点亮,LED_B熄灭;(3)第2次按下按键1后,LED_A熄灭,LED_B点亮;(4)第3次按下按键1后,LED_A和LED_B均点亮;(5)第4次按下按键1后,LED_A和LED_B持续闪烁;(6)第5次按下按键1后,LED_A和LED_B均回归到熄灭状态,依此反复;(7)控制程序采用Arduino C/C++代码编写,不得使用图形化软件编写;(8)未作规定处可自行处理,无明显与事实违背即可。
说明,请考生在考试结束前,按照如下要求提交相关文件:(1)将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS4_身份证号,大小5M以下;(2)将程序文件通过“上传附件”按钮进行上传;(3)程序编写过程中不得打开其它示例程序,不得使用图形化软件生成代码,如发现,实操成绩按照0分处理。
参考资料:评分项(器件及器件连接20分;功能实现80分):(1)实现当第1次按下按键1后,LED_A点亮,LED_B熄灭;(15分)。
(2)实现当第2次按下按键1后,LED_A熄灭,LED_B点亮;(15分)。
(3)实现当第3次按下按键1后,LED_A和LED_B均点亮;(15分)。
(4)实现当第4次按下按键1后,LED_A和LED_B闪烁;(15分)。
(5)实现当第5次按下按键1后,LED_A和LED_B均熄灭;(10分)。
全国青少年机器人技术等级考试 电机示例程序详解,四级实操必考内容之一!.doc

四级等级考试开考以来,两次实操考试都是考察的小车的搭建和程序驱动小车的任务,所以用代码编程来控制电机已经成为四级等级考试的必考内容之一。
在这里简单的通过示例程序来讲解一下如何用代码编程来控制电机的正传、反转、停止。
供各位老师和学员参考。
在三级考试里只考察图形化模块编程驱动电机,但是四级中是要求用代码编程,对于代码编程比较薄弱的新手来说是一个挑战。
但是掌握了方法进行相应的练习还是完全可以掌握的,这部分只是并没有那么深奥。
在这里用的示例套件是芝麻豆主控,我们知道芝麻豆的主控在图形化编程环境中,只有D1、D2、D3三个端口可以接直流电机并驱动电机进行工作。
对应的应该是输出模块,注意电机是可以调速的,不是简单的开关数字量,所以在这里这三个端口对应的就是模拟输出。
之前的帖子里我讲过芝麻豆主控的D1、D2、D3端口对应的arduino UNO的管脚分别是:D1 ——5、6 (其中5是辅助管脚,6是主管脚)D2 —— 9、10 (其中9是辅助管脚,10是主管脚)D3 —— 3、11 (其中3是辅助管脚,11是主管脚)对于arduino UNO主控板3、5、6、9、10、11这些管脚实际上就是模拟输出管脚,也就是具有PWM(脉冲宽度调制)功能的引脚,这些引脚可以通过脉冲宽度调制,来调整占空比,从而实现模拟输出,实现电机调速功能,模拟输出的取值范围是0——255之间。
0代表管脚完全关闭,相当于输出电压为0,255表示管脚完全打开,相当于输出电压5V。
很明显255的时候电机速度应该是最快的。
0的时候电机是停止的。
实际情况由于电机启动需要较大的电流,一般情况下,模拟输出大约在0到120之间的时候,很多电机是启动不起来的,所以建议要想让电机转动,模拟输出的值不能太小。
最好大于120。
为什么要用两个模拟引脚去控制一个电机呢?这里是为了实现程序可以控制电机正反转的功能。
比如D1端口(5、6)上连接直流电机模块驱动电机。
当5引脚输出模拟量255、6引脚输出0的时候,电机是向一个方向最大速度转动,反之,如5引脚输出0,6引脚输出255,那就是以最大速度反转。
四级理论试题汇总-含答案解析
全国青少年机器人技术等级考试(四级)一、单选题1.(20181208)超声波传感器,有四个引脚,超声波传感器从哪个引脚接受触发信号,开始工作?(B)A. VCCB. TrigC. EchoD. GND解析:Trig是数字输出引脚,当输出一个10微秒的脉冲后,传感器触发开始工作。
Echo是数字输入引脚,用来测量超声波发出和返回的时间2.(20181208)关于PWM下面描述错误的是?(C)A. PWM是通过数字信号实现的模拟输出B. PWM是通过调整占空比来实现输出值的变化C. 占空比是一个脉冲周期内低电平时间所占的比例D. PWM等效输出电压值等于占空比乘以高电平值解析:考察PWM(脉冲宽度调制)和占空比概念。
在一定的脉冲周期中,通过调节高电平的宽度来实现模拟输出,占空比是指高电平占周期的百分比。
3.(20181208)关于循环语句中,break语句描述错误的是?(B)A. break语句只对包含它的最内层循环语句起作用B. break语句可以跳出多重循环C. break语句终止当前循环D. break语句执行后,程序将跳转到本循环后的第一条语句开始继续执行解析:break语句的作用是跳出当前循环,接着执行循环后面的语句。
4.(20181208)在程序运行过程中,需要延时0.2秒,下列程序正确的是?(C)A. delay(0.2)B. delay(20)C. delay(200)D. delay(2000)5.(20181208)以下有关switch语句的说法正确的是?(B)A. break语句是switch语句中必需的一部分B. 在switch 语句中可以根据需要使用或不使用break语句C. break语句在switch 语句中不可以使用D. 在switch 语句中的每一个case都要使用break语句解析:根据需要来确定在switch中使用或者不使用break语句或default语句。
6.(20181208)Arduino C语言中,十六进制数的前缀是?(D)A. 0B. 无前缀C. 0bD. 0x解析:十六进制数的前缀是0x,在遥控器键值编码中有十六进制数。
全国青少年机器人等级考试2018年12月8日试题

单选题:每题两分1.下列哪个不是机器人?A.aB.bC.cD.d2.电源相当于机器人的()。
A.手臂B.大脑C.心脏D.皮肤3. 当代机器人家族中,用于生产制造的机器人为?A. 工业机器人B. 军用机器人C. 服务机器人D. 特种机器人4.机器人结构中,起着支撑作用的部件是?A.机座B.电机C.腰部D.手臂5.如图该零件应该配合下列哪种工具使用?A.aB.bC.cD.d6. 下图中哪个是冠齿轮?A.aB.bC.cD.d7.如图,从地面到T点那条路走起来最省力?A.aB.bC.cD.d8.下列最稳定的结构是?A.正方形B.长方形C.圆形D.三角形9.下列没有运用三角形稳定性的是?A.aB.bC.cD.d10.如图关于小朋友荡秋千过程中说法正确的是?A.荡到最低点速度最快B.荡到最高点速度最快C.荡到最低点机械能为0D.荡到最高点机械能为011.关于单摆说法正确的是?A.所有单摆的周期都一样B.增加摆长可以让单摆变慢C.增加摆长可以让单摆变快D.单摆周期跟摆长无关12.如图所示,不计滑轮重及摩擦,分别用力F1、F2匀速提升同一重物,则关于力F1、F2的大小关系描述正确的是?A.F1=F2B.F1<F2C.F1>F2D.不确定13.盘山公路是利用我们所学的哪种简单机械来省力的?A.滑轮B.杠杆C.斜面D.轮子14. 如图人用铁棍翘起石头,他的支点是?A.aB.bC.cD.d15.下列用到省力杠杆的是?A.aB.bC.cD.d16.如图使用镊子的时候动力作用点为?A.aB.bC.cD.d17. 如图关于轮轴的说法正确的是?A.轮轴一定是省力的B.轮轴一定是费力的C.轮轴省力费力要看力作用在轮上还是轴上D.轮轴的外形一定是圆形18. 关于两齿轮平行啮合说法正确的是?A.两个齿轮的齿的数量一定相等B.图中两齿轮啮合目的是加速C.图中两齿轮啮合目的是减速D.图中两齿轮的转向相同19 .下列没有应用齿轮的是?A.机械手表B.电子手表C.小汽车D.自行车20. 如图我们用()改变了施力方向。
全国青少年机器人技术等级考试 四级实操2018-09.doc
自动跟随小车(共1题,每题100分,共100分)1、主题:跟随小车器件:三四级等级考试套件要求:1、现场搭建小车。
2、小车从发车线出发,向前移动,距离前方障碍物10厘米处暂停。
3、移动障碍物,随着障碍物的移动,小车与障碍物间的距离始终保持10厘米。
4、通过超声波传感器进行距离检测。
5、程序编写采用C语言,不得使用图形化软件编写。
6、考试结束,考生将代码转贝上交。
说明:1、考场编程环境为: Arduino IDE2、实操开始,考生需更先向主控板写入 blink程序,经监考老师确认后方可进行小车组装。
3、小车距障碍物的距离为超声波传感器前端距离障碍物的距离。
4、出发前,小车距离障物的距离为20-30cm。
5、障碍物为竖向放置的A4尺寸大小。
6、编写程序文件命名规则为DJ KS_准考证号.ino。
参考资料:HC-SR04/05超声波的工作原理如下图1所示.1、先向Tring引脚发送时长不小于10us的高电平,触发超声波提块。
2、触发后,模块会自动发射8个40KHz的方波,并自动检测是否有信号回。
3.如果有信号返回,通过Echo引脚输出一个高电平,高电平持续的时间便是超声波从发射到接收的时间。
/*本程序为18年9月份四级实操考试示例程序仅供参考程序电机接D1和D2端口,超声波接D4端口程序中用串口打印来显示超声波测量距离四级考察的内容是对三级学习内容的综合考察,并且增加了对代码编程和结构搭建的要求。
在图形化里面的编译按钮的左边有一个按钮,通过这个按钮是可以直接打开代码arduino IDE来进行代码编辑的。
另外zblockly里也内置了一套arduino IDE,可以直接用来进行代码编程。
也有等级考试相关的代码示例程序。
202403机器人四级 理论+实操

青少年机器人技术等级考试理论综合试卷(四级)一、单选题(共20题,共80分)1.Arduino UNO/Nano主控板,通过按键开关切换高低电平,电路搭设如下,该电路属于?()A. 外部上拉电阻电路B. 外部下拉电阻电路C. 内部上拉电阻电路D. 内部下拉电阻电路试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:2.Arduino UNO/Nano主控板,下列选项中,控制板载LED灯点亮的是?()A. analogWrite(13,255);B. analogWrite(13,1023);C. digitalWrite(13,HIGH);D. digitalWrite(13,LOW);试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:3.Arduino C程序如下,当变量val的值为1时,该段程序运行后,串口监视器输出结果是?()A. 1B. 14C. 123D. 1234试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:4.Arduino UNO/Nano主控板,使用函数digitalRead(3)读取返回值,当引脚3输入的电压是2.5V时,函数的返回值是?()A. 0B. 1C. 1023D. 不确定试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:5.Arduino C语言中,十进制数的前缀是?()A. 0bB. 0xD. 无前缀试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:6.采用外部上拉电阻电路读取按键开关的返回值,电路如下图所示,图中A和B所对应的器件是?()A. 按键开关/电阻B. 电阻/按键开关C. 按键开关/导线D. 导线/按键开关试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:7.Arduino C程序如下,该段程序运行后,变量sum的值是?()B. 8C. 12D. 18试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:8.Arduino C程序如下,当变量socre的值为60时,该段程序运行后,串口监视器输出结果是?()A. DB. CC. AD. CBA试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:D考生得分:0是否评分:已评分评价描述:9.Arduino UNO/Nano主控板,通常情况下,获取单个按键模块的返回值,应使用的函数是?()A. digitalWrite()B. digitalRead()C. analogWite()D. analogRead()试题类型:单选题标准答案:B试题难度:试题解析:考生答案:C考生得分:0是否评分:已评分评价描述:10.Arduino C语言中,下列选项中,二进制0b1111对应的十进制是?()A. 1111B. FC. 15D. 17试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:4是否评分:已评分评价描述:11.下图所示标识中,属于NPN三极管的是?()A.B.C.D.试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:12.读取当前环境光数据,电路如下图所示,当光照强度增大时,analogRead(A1)的返回值是?()A. 增大B. 减小C. 不变D. 不确定试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:13.有关Arduino C程序的setup()函数,下列说法不正确的是?()A. 程序中setup()函数不可缺失。
答案+解析(2018.12机器人等级考试三级理论真题)
全国青少年机器人技术等级考试(2018年12月8日)附答案+详细解析一、单选题(共30题,每题2分,共60分)1. 正常情况下,程序中,当引脚4输入的电压为2.5V时,串口监视器的返回值是?A. 0B. 1 C。
512 D。
不确定参考答案:D解析:数字电路高电平的范围是:3。
5~5。
5V,数值为1;低电平电压范围是:-0。
5~1.5V,数值为0,题中输入的2。
5不在这两个范围内,故选D。
2。
程序中的低电平一般用()来表示。
A. 0 B。
1 C. 0或1 D. 2参考答案:A解析:据上一题解析,选A。
3.运行下图程序,串口监视器窗口输出数值为?A. 2B. 3C. 6D. 18解析:符号“%"是取余数,i=3,j=6,6除以3取余数为0,条件为0,不成立,所以打印输出变量j,输出数值为6,故选C。
4. 当光照射光敏电阻时,光敏电阻的阻值?A. 变大 B。
变小 C。
不变 D。
没有规律参考答案:B解析:光敏电阻根据光照强度改变其电阻,光线越强电阻越小,反之越大。
5. 两节普通干电池并联后的电压为?A. 1.5V B。
3V C。
6V D. 36V参考答案:A解析:并联电路各支路电压相同,输出电压不变,仍为1。
5V。
6。
Arduino UNO或Nano主控板,通过电位器旋转控制LED的亮度,程序运行下列表达正确的是?A。
电位器连接在3引脚,LED灯连接在A0引脚。
B. 电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭一次。
C. 电位器从一端旋转至另外一端时,LED灯的状态从最亮渐变到熄灭四次。
D. 电位器从一端旋转至另外一端时,LED灯的状态只有亮灭两种状态。
解析:电位器输入数值范围为:0-1023,模拟输出数值为:0—255(0为熄灭,255最亮),从256开始相当于又从0开始到255变化,1023/255=4,所以选C.7。
下列模块中,属于逻辑运算符的是?A. B.C. D。
青少年机器人教育等级评测四级理论题
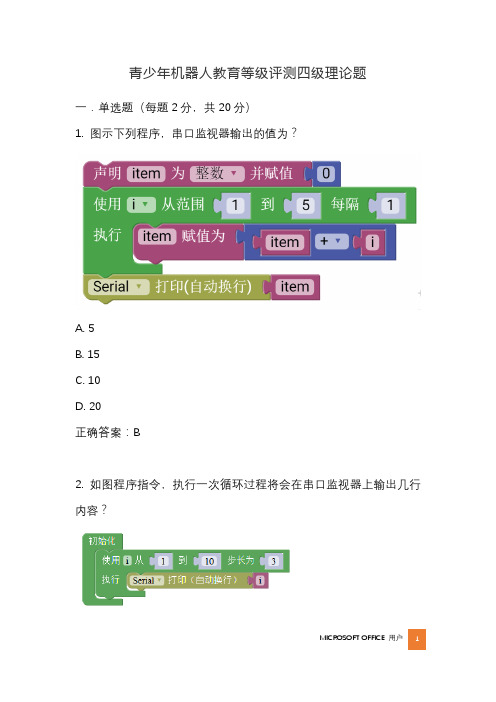
青少年机器人教育等级评测四级理论题一.单选题(每题2分,共20分)1.图示下列程序,串口监视器输出的值为?A. 5B. 15C. 10D. 20正确答案:B2. 如图程序指令,执行一次循环过程将会在串口监视器上输出几行内容?A.1B. 3C. 4D. 10正确答案:C3. 定义变量时,结构不正确的是?A. int a=0;b=0;c;B. int a=0,b=0,c=0;C. int a;D. int a=0,b=0;正确答案:A4. 下图所示程序中,模拟输入模块A0引脚的返回值为800时,则串口监视器中显示的item的值为()A. 255B. 0C. 500D. 100正确答案:B5. 下列属于浮点型数据的是?A. 314B. 3.14C. abcD. 123正确答案:B6.运算符逻辑“与”的符号为?A. “& ”B. “||”C. “!”D. “&&”正确答案:D7.从下列语句中可以看出b是?if(a>0) b=-aif(a<0) b=aif(a=0) b=a-1A.负数B.正数C.0D.无法确定正确答案:A8.已知以下语句执行后a, b, c的值是?int a = 10, b=20, c;if(a<b)c = a+b;A. a=10,b=30,c=20B. a=20,b=30,c=10C. a=10,b=20,c=30D. a=20,b=30,c=10正确答案:C9.执行以下语句后x, y, z的值是?int x = 10 , y = 20, z = 30;if(x>y){z = x, x = y, y = z;}A. x=20,y=30,z=30B. x=20,y=30,z=10C. x=10,y=20,z=30D. x=20,y=30,z=20正确答案:C10、下列流程图中,表示if-else语句的是?ABCD正确答案:B二.判断题(每题2分,共10分)11. 在C程序代码中,//后面的部分,可以被执行。
2023.03全国青少年机器人技术等级考试理论实操综合试卷(四级)

青少年机器人技术等级考试理论综合试卷(四级)分数:100 题数:30一、单选题(共20题,共80分)1.Arduino C语言中,前缀0x表示的数制是?()A. 二进制B. 八进制C. 十进制D. 十六进制试题编号:20230310152545439试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:2.Arduino UNO/Nano主控板,下列选项中,关于A0~A5引脚描述正确的是?()A. 仅用于模拟信号输入B. 仅用于模拟信号输出C. 可用于模拟信号输入和输出D. 可用于数字信号输入和输出以及模拟信号输入试题编号:20230310152545610试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:3.下列选项中关于break语句和continue语句说法正确的是?()A. 在循环结构中break语句是结束本次循环B. 在循环结构中continue语句是结束整个循环C. 在循环结构中break是终止整个程序的运行D. 在循环结构中break是结束整个循环,continue是结束本次循环试题编号:20230310152546048试题类型:单选题标准答案:D试题难度:试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:4.Arduino UNO/Nano主控板,电路搭设如下图所示,下列选项中,关于LED控制引脚模式设置正确的是?()A. pinMode(6,INPUT);B. pinMode(6,OUTPUT);C. pinMode(2,INPUT);D. pinMode(2,OUTPUT);试题编号:20230310152546391试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:4是否评分:已评分评价描述:5.Arduino UNO/Nano主控板,通过引脚3向一个传感器发送一个20微秒的低电平触发信号,如下图所示,下列程序正确的是?()A.B.C.D.试题编号:20230310152546219试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:4是否评分:已评分评价描述:6.Arduino C程序如下,当程序运行时,串口监视器输出结果是?()A. 0B. 1C. 2D. 3试题编号:20230310152545938试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:7.Arduino C程序如下,当程序运行时,串口监视器输出结果是?()A.B.C.D.试题编号:20230310152546001试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:8.2022年底,OpenAI发布了新一代聊天机器人模型,推动人工智能应用达到一个新的高度,该模型的名称是?()A. ChatGPTB. KerasC. AlphaFoldD. TensorFlow试题编号:20230310152545172试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:4是否评分:已评分评价描述:9.Arduino Nano主控板,通过光敏电阻控制LED灯亮度的变化。
全国青少年机器人技术等级考试 四级实操2018-12.doc
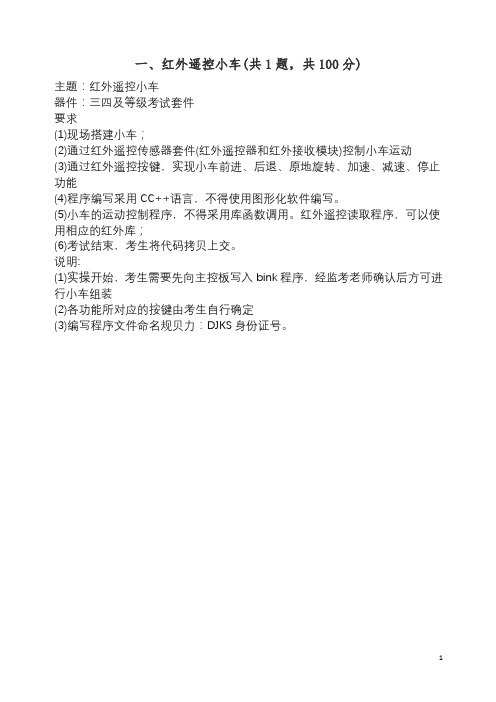
一、红外遥控小车(共1题,共100分)
主题:红外遥控小车
器件:三四及等级考试套件
要求
(1)现场搭建小车;
(2)通过红外遥控传感器套件(红外遥控器和红外接收模块)控制小车运动
(3)通过红外遥控按键,实现小车前进、后退、原地旋转、加速、减速、停止功能
(4)程序编写采用CC++语言,不得使用图形化软件编写。
(5)小车的运动控制程序,不得采用库函数调用。
红外遥控读取程序,可以使用相应的红外库;
(6)考试结束,考生将代码拷贝上交。
说明:
(1)实操开始,考生需要先向主控板写入bink程序,经监考老师确认后方可进行小车组装
(2)各功能所对应的按键由考生自行确定
(3)编写程序文件命名规贝力:DJKS身份证号。
1。
全国青少年机器人技术等级考试试卷(四级)
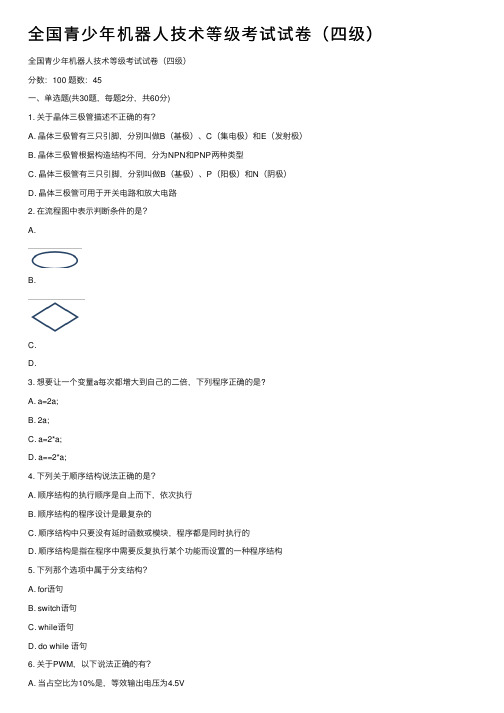
全国青少年机器⼈技术等级考试试卷(四级)全国青少年机器⼈技术等级考试试卷(四级)分数:100 题数:45⼀、单选题(共30题,每题2分,共60分)1. 关于晶体三极管描述不正确的有?A. 晶体三极管有三只引脚,分别叫做B(基极)、C(集电极)和E(发射极)B. 晶体三极管根据构造结构不同,分为NPN和PNP两种类型C. 晶体三极管有三只引脚,分别叫做B(基极)、P(阳极)和N(阴极)D. 晶体三极管可⽤于开关电路和放⼤电路2. 在流程图中表⽰判断条件的是?A.B.C.D.3. 想要让⼀个变量a每次都增⼤到⾃⼰的⼆倍,下列程序正确的是?A. a=2a;B. 2a;C. a=2*a;D. a==2*a;4. 下列关于顺序结构说法正确的是?A. 顺序结构的执⾏顺序是⾃上⽽下,依次执⾏B. 顺序结构的程序设计是最复杂的C. 顺序结构中只要没有延时函数或模块,程序都是同时执⾏的D. 顺序结构是指在程序中需要反复执⾏某个功能⽽设置的⼀种程序结构5. 下列那个选项中属于分⽀结构?A. for语句B. switch语句C. while语句D. do while 语句6. 关于PWM,以下说法正确的有?A. 当占空⽐为10%是,等效输出电压为4.5VB. 可以利⽤PWM管脚实现模拟信号输⼊C. PWM是指在数字系统中,通过调整占空⽐来实现模拟输出D. UNO主控板,A0-A5管脚具有PWM模拟输出功能7. ⼆进制数11+1=?A. 100B. 101C. 110D. 1118. 下列关于if语句说法正确的是?A. if语句只能适合单分⽀结构B. if语句可以变形为if-else 或者if-else if-elseC. 使⽤if语句就可以实现重复执⾏某⼀段功能D. if语句的执⾏顺序是⾃上⽽下,依次执⾏如下图所⽰分⽀结构中说法正确的是?9.A. 该switch中没有default所以结构是错误的B. 当a==1时,先执⾏语句1,再执⾏语句2;再执⾏语句3;再执⾏语句4C. 当a==2时,先执⾏语句2,再执⾏语句3;再执⾏语句4D. 当a==3时,执⾏语句3后,跳出{},这段程序执⾏完毕10.执⾏下列所⽰程序,输出a 为?A. a=3B. a=2C. a=1D. a=0 11. 下列分⽀结构中格式正确的是?A.B.C.D.12. pinMode(pin,mode)函数设置数字引脚的⼯作模式,以下说明正确的有?A. 引脚的⼯作模式有:INPUT、OUTPUT两种B. 引脚的⼯作模式有:INPUT、OUTPUT、INPUT_PULLUP三种C. 引脚的⼯作模式有:INPUT、OUTPUT、HIGH三种D. 引脚的⼯作模式有:HIGH、LOW两种13. analogWrite(pin,val)函数中,val的值的说明不正确的有?A. Val值的范围0-255B. Val值为255时,引脚完全打开,管脚输出⾼电平C. Val值为255时,引脚完全关闭,管脚输出低电平D. 当val值为255时,和digitalWrite(pin,HIGH)效果⼀致14. 下列关于变量类型的说法正确的是?A. float代表的是浮点型,它可以保留到⼩数点后七位B. int代表的是整数型,可是表⽰真分数C. char表⽰的字符型,也可以表⽰⼀个字节⼤⼩的数字D. bool是布尔型,这种类型也可以取0-255的整数15. 下列关于程序三种基本结构说法正确的是?A. 顺序结构可以通过判断不同的情况,执⾏不同的内容B. 选择结构⼜称作分⽀结构,这种结构可以实现⼀定功能的循环C. 循环结构可以实现重复执⾏某个功能D. 只有循环结构中会⽤到break16. 获取电位器模块的返回值,以下选择正确的是?A. digitalRead(A0)B. digitalRead(3)C. digitalWrite(5)D. analogRead(A0)17. 关于pulseIn()函数,下列说法正确的是?A. pulseIn()函数⽤于向管脚输出⾼低电平B. pulseIn()函数⽤来读取⼀个管脚的脉冲(HIGH或LOW)C. pulseIn()函数只能读取管脚的⾼电平脉冲D. pulseIn()函数的返回值是0或者1如下图所⽰变量运算,说法正确的是?18.A. 程序结束后,a的值为2.5B. 程序结束后,a的值为2C. 变量c为整数型;a和b为浮点型D. 程序结束后,b的值为4关于多分⽀结构说法正确的是?19.A. 当表达式1成⽴时,执⾏语句1;再执⾏语句2,语句3B. 当表达式1不成⽴时,执⾏语句2;不执⾏语句1,语句3C. 表达式1成⽴,表达式2 也成⽴时,执⾏语句2D. 表达式1不成⽴,表达式2成⽴时,执⾏语句2;不执⾏其他语句20. 关于setup()函数和loop()函数,以下说法正确的是?A. 程序编写时,setup()函数和loop()函数可以缺失B. setup()函数⾥⾯的程序,在程序执⾏时通常放置程序的初始化程序C. loop()函数⾥⾯的程序,在程序运⾏时只运⾏⼀次,通常放置主执⾏程序D. 程序运⾏时,先运⾏loop()函数内的程序,然后运⾏setup()函数内的程序21. 下列选项中关于break和continue说法正确的是?A. 在循环结构中break是结束本次循环,continue是结束整个循环B. 在循环结构中break和continue⽤于结束整个循环C. 在循环结构中break和continue是结束本次循环D. 在循环结构中break是结束整个循环,continue是结束本次循环22. 下列选项中,说法不正确的是?A. ⽇常⽣活中如果路⼝遇到红灯,需要停车等待;如果是绿灯,则要开车通过;这段描述在程B. ⾃动门看到⼈可以⾃动开启,在程序中属于分⽀结构C. S弯巡线⼩车是利⽤while循环结构判断是否遇到⿊线的D. 使⽤蜂鸣器播放声⾳可以使⽤循环结构23. 使⽤UNO主控板控制⼩车的速度连续变化,可以使⽤引脚?A. 0B. 1C. 3D. A024. 下列程序中,没有实现了让变量a⾃动加1的效果的是?A. a+1;B. a=a+1;C. a+=1;D. a++;25. 下列关于变量的说法正确的是?A. 变量可以随时改变B. 在声明变量时,必须赋予初始值C. 程序中变量不仅值可以变化,名称可以随意变化D. 程序中变量只能⽤于计数26. 下列选项中关于循环结构说法错误的是?A. 循环结构可以减少源程序重复书写的⼯作量,⽤来描述重复执⾏某段算法的问题B. 循环结构中⼀般会标明循环的条件,不是⽆⽌境的循环C. 循环结构中,if语句最常⽤D. 循环结构while和do while的区别是:while先判断循环条件再执⾏内容;do while则先执⾏内如下图所⽰循环结构,循环的次数为?27.A. 3B. 2C. 1D. 028. 下列程序书写格式正确的是?A.B.C.D.29. 下列选项中不属于程序三种基本结构的是?A. 顺序结构B. 选择结构C. 总线结构D. 循环结构30. 下列关于变量定义正确的是?A. float a=0;B. int 2a=0;C. int a*=0;D. int a=0;b=0;⼆、多选题(共5题,每题4分,共20分)31. 如下列程序中,书写格式正确的有?A.B.C.D.32. 下列选项中说法正确的是?A. float代表的是浮点型,它可以保存七位有效数字B. 在声明变量时,可以根据需要赋初值或者不赋初值C. a--,指的是将变量⾃动减1D. a*3,指的是将变量扩⼤三倍如果下图所⽰变量运算,程序结束后输出值正确的是?33.A. a=2B. a=2.5C. b=3.5D. b=4.534. 下列关于变量的运算说法错误的是?A. a++;指的是将变量a⾃动加1B. a--;指的是将变量⾃动减2C. a=a+1;这个等式不成⽴D. a=a*2;指的是将变量a增⼤2关于下图分⽀结构说法错误的是?35.A. 满⾜表达式执⾏语句2,不满⾜执⾏语句1B. 满⾜表达式执⾏语句1,不满⾜执⾏语句2C. 满⾜表达式先执⾏语句1,再执⾏语句2D. 不满⾜表达式先执⾏语句2 ,再执⾏语句1三、判断题(共10题,每题2分,共20分)36. ⾃定义函数可以将简化复杂的程序,或者减少⼯作量。
四级全国青少年机器人技术等级考试理论

四级全国青少年机器人技术等级考试理论一、单选题(共20题,共80分)您的姓名: [填空题] *_________________________________1.以下数据类型与哪个选项对应?()整数, 长整数, 小数, 布尔,字节,字符 [单选题] *A.Int long boolean float byte charB.Int long float boolean byte char(正确答案)C.Int long float boolean char bytD.Int long float boolean byte String2.关于NPN型三极管,说法错误的是?() [单选题] *A.它的导通要在基极加一个正的电压B.三极管是一种电流控制半导体器件C.它的三根接脚分别是基极,接收极,发射极(正确答案)D.它的发射极要接地3.关于上拉电阻说法错误的是?() [单选题] *A.上拉电阻与GND相连(正确答案)B.上拉电阻与 VCC相连C.上拉电阻是对器件注入电流D.上拉电阻是将用电器固定在低电平4.在使用C语言给Arduino编程中,关于自定义函数名的命名规则说法错误的是?() [单选题] *A.函数名区分大小写B.函数名的第一个字不可以是数字C.函数名可以包含英文字母、数字、下划线和特殊字符(正确答案)D.函数名不可以和系统的关键字重名5.Arduino编程指令Serial.printIn(10,HEX),输出的是哪一项?() [单选题] *A.10B.程序报错C.A(正确答案)D.10106.下图程序中,串口监视器输出的值可能是?()[单选题] *A. 0B. 2.7C. 2(正确答案)D. 37.在使用C语言给Arduino编程中, 0xFFE210表示的是?() [单选题] *A. 一个变量B. 一个函数C. 一个2进制数D. 一个16进制数(正确答案)8.电路搭建如下,当光照射光敏电阻时,随着光照强度的增强,analogRead(A0)的返回值会如何变化?()[单选题] *A. 随着光照强度增加而减少(正确答案)B. 随着光照强度增加而增加C. 不随光的变化而变化D. 随光的变化做无规则变化9.对程序指令analogwrite(参数1,参数2);描述正确的是?() [单选题] *A.A.括号中的两个参数1和参数2分别引脚号和模拟输出值(正确答案)B.Arduino Uno控制板的13引脚可以使用这个指令C.参数2的取值范围是0-1023D.这个指令是通过PWM方式输出模拟值10.以下四个符号中属于赋值运算符的是?() [单选题] *A. =(正确答案)B. ++C. ==D. !11.电路搭建如图所示,请问图中电阻属于?()[单选题] *A.既是上拉电阻也是下拉电阻B.上拉电阻C.下拉电阻(正确答案)D.既不是上拉电阻也不是下拉电阻12.在机器人制作中,“超声波传感器—Arduino控制板—马达”可以对应人体的哪些部位?() [单选题] *A. 大脑—眼睛—腿B. 大脑—腿—眼睛C. 眼睛—大脑—腿(正确答案)D. 眼睛—腿—大脑13. 如图所示,有一盏红色LED小灯,已知他的工作电压为1.7V,工作电流是30mA,我们想用Arduino点亮该LED小灯,相关Arduino代码如下 analogWrite(9 , 255).则理论上,所串联的电阻合理的是?()[单选题] *A. 10ΩB. 30ΩC. 110Ω(正确答案)D. 480Ω14. 关于“数字信号和模拟信号”的概念错误的是?() [单选题] *A. 模拟信号是在时间和数值上均具有连续性的信号B. 数字信号是在时间和数值上均具有离散性的信号C. Arduino中1或0这样的数值反映的是模拟信号(正确答案)D. 电位器,光明电阻所反馈的是模拟信号15. 对欧姆定律的解释中,下列说法错误的是?() [单选题] *A. 导体中的电流跟导体两端的电压成正比,跟导体的电阻成反比B. 在导体固定的情况下,随着电压增大,通过导体的电流随之增大C. 在电压固定的情况下,当导体阻值越大时,通过的电流随之减小D. 欧姆定律的公式是I=UR(正确答案)16. 程序指令delay(1000);的意识是?() [单选题] *A. 延时1000微秒B. 延时1000毫秒(正确答案)C. 延时1000秒D. 延时1000周期17. 电路搭建如图,当程序执行analogWrite(3,256)后,下列描述正确的是?()[单选题] *A. LED灯亮度不断变化B. LED灯熄灭(正确答案)C. LED灯点达到最亮D. LED灯烧毁18. 使用电位器控制LED小灯的明暗,已知电位器接A0引脚,LED小灯接3号引脚,以下程序合理的是?() [单选题] *A. analogWrite(A0, map(analogRead(3),0,1023,0,255));B. analogWrite(3, map(analogRead(A0),0,255,0,1023));C. digitalWrite(3,map(analogRead(A0),0,1023,0,255));D. analogWrite(3,map(analogRead(A0),0,1023,0,255));(正确答案)19. 下图程序执行完后,会在串口监视器中打印出?()[单选题] *A.B.(正确答案)C.D.20.呼吸灯是一种逐渐点亮逐渐熄灭的灯管效果,以下Arduino程序中,合理的呼吸灯程序是?()[单选题] *A.B.(正确答案)C.D.二、多选题(共5题,共10分) [填空题]_________________________________21. 以下C语言的系统关键字中,用于“分支结构(选择结构)”的有?() *A. if(正确答案)B. switch(正确答案)C. whileD. for22. 以下选项中随Arduino控制板的描述正确的是?() *A. Arduino控制板支持C语言编程(正确答案)B. Arduino控制板可用于机器人的控制装置(正确答案)C. Arduino控制板是一种微电脑控制板(正确答案)D. Arduino控制板只有UN0这个型号23. 程序analogRead(A0)返回了800,请问在A0口上接的电子设备有可能是?() *A. 电位器(正确答案)B. 光敏传感器(正确答案)C. 温度传感器(正确答案)24. 在C语言编程中,使变量i的值增加1的表达式有哪些?() *A. i=i+1;(正确答案)B. i+1;C. i+=1;(正确答案)D. i++;(正确答案)25. 在以下对C语言的描述,正确的是?() *A.C语言是一种结构化语言,它层次清晰,易于调试和维护(正确答案)B. C语言中,声明变量需要指定变量的数据类型(正确答案)C. C语言的变量区分大小写(正确答案)D. C语言是一种脚本语言,不需要“编译”过程三、判断题(共5题,共10分) [填空题]_________________________________26. Arduino UNO/Nano控制板中支持PWM的引脚有3、5、6、9、10、11、13?() [单选题] *正确错误(正确答案)27. Arduino编程中setup()指令会在控制板上电后反复运行?() [单选题] *正确错误(正确答案)28. 如果执行程序analogWrite(3,256)后,用万用表测量3号引脚的电压,可能是0V?() [单选题] *正确(正确答案)29. 使用digitalRead()函数无法读取温度传感器的任何值?() [单选题] *正确错误(正确答案)30. 0xFF38C7是一个16进制数据?() [单选题] *正确(正确答案)错误。
四级理论试题汇总-含答案解析
全国青少年机器人技术等级考试(四级)一、单选题1.(20181208)超声波传感器,有四个引脚,超声波传感器从哪个引脚接受触发信号,开始工作?(B)A. VCCB. TrigC. EchoD. GND解析:Trig是数字输出引脚,当输出一个10微秒的脉冲后,传感器触发开始工作。
Echo是数字输入引脚,用来测量超声波发出和返回的时间2.(20181208)关于PWM下面描述错误的是?(C)A. PWM是通过数字信号实现的模拟输出B. PWM是通过调整占空比来实现输出值的变化C. 占空比是一个脉冲周期内低电平时间所占的比例D. PWM等效输出电压值等于占空比乘以高电平值解析:考察PWM(脉冲宽度调制)和占空比概念。
在一定的脉冲周期中,通过调节高电平的宽度来实现模拟输出,占空比是指高电平占周期的百分比。
3.(20181208)关于循环语句中,break语句描述错误的是?(B)A. break语句只对包含它的最内层循环语句起作用B. break语句可以跳出多重循环C. break语句终止当前循环D. break语句执行后,程序将跳转到本循环后的第一条语句开始继续执行解析:break语句的作用是跳出当前循环,接着执行循环后面的语句。
4.(20181208)在程序运行过程中,需要延时0.2秒,下列程序正确的是?(C)A. delay(0.2)B. delay(20)C. delay(200)D. delay(2000)5.(20181208)以下有关switch语句的说法正确的是?(B)A. break语句是switch语句中必需的一部分B. 在switch 语句中可以根据需要使用或不使用break语句C. break语句在switch 语句中不可以使用D. 在switch 语句中的每一个case都要使用break语句解析:根据需要来确定在switch中使用或者不使用break语句或default语句。
6.(20181208)Arduino C语言中,十六进制数的前缀是?(D)A. 0B. 无前缀C. 0bD. 0x解析:十六进制数的前缀是0x,在遥控器键值编码中有十六进制数。
全国青少年机器人技术等级考试电机示例程序详解,四级实操必考内容之一!

四级等级考试开考以来,两次实操考试都是考察的小车的搭建和程序驱动小车的任务,所以用代码编程来控制电机已经成为四级等级考试的必考内容之一。
在这里简单的通过示例程序来讲解一下如何用代码编程来控制电机的正传、反转、停止。
供各位老师和学员参考。
在三级考试里只考察图形化模块编程驱动电机,但是四级中是要求用代码编程,对于代码编程比较薄弱的新手来说是一个挑战。
但是掌握了方法进行相应的练习还是完全可以掌握的,这部分只是并没有那么深奥。
在这里用的示例套件是芝麻豆主控,我们知道芝麻豆的主控在图形化编程环境中,只有D1、D2、D3三个端口可以接直流电机并驱动电机进行工作。
对应的应该是输出模块,注意电机是可以调速的,不是简单的开关数字量,所以在这里这三个端口对应的就是模拟输出。
之前的帖子里我讲过芝麻豆主控的D1、D2、D3端口对应的arduino UNO的管脚分别是:D1 ―― 5、6 (其中5是辅助管脚,6是主管脚)D2 ―― 9、10 (其中9是辅助管脚,10是主管脚)D3 ―― 3、11 (其中3是辅助管脚,11是主管脚)对于arduino UNO主控板3、5、6、9、10、11这些管脚实际上就是模拟输出管脚,也就是具有PWM (脉冲宽度调制)功能的引脚,这些引脚可以通过脉冲宽度调制,来调整占空比,从而实现模拟输出,实现电机调速功能,模拟输出的取值范围是0――255之间。
0代表管脚完全关闭,相当于输出电压为0,255 表示管脚完全打开,相当于输出电压5V。
很明显255的时候电机速度应该是最快的。
0的时候电机是停止的。
实际情况由于电机启动需要较大的电流,一般情况下,模拟输出大约在0到120之间的时候,很多电机是启动不起来的,所以建议要想让电机转动,模拟输出的值不能太小。
最好大于120。
为什么要用两个模拟引脚去控制一个电机呢?这里是为了实现程序可以控制电机正反转的功能。
比如D1端口(5、6)上连接直流电机模块驱动电机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、红外遥控小车(共1题,共100分)
主题:红外遥控小车
器件:三四及等级考试套件
要求
(1)现场搭建小车;
(2)通过红外遥控传感器套件(红外遥控器和红外接收模块)控制小车运动
(3)通过红外遥控按键,实现小车前进、后退、原地旋转、加速、减速、停止功能
(4)程序编写采用CC++语言,不得使用图形化软件编写。
(5)小车的运动控制程序,不得采用库函数调用。
红外遥控读取程序,可以使用相应的红外库;
(6)考试结束,考生将代码拷贝上交。
说明:
(1)实操开始,考生需要先向主控板写入bink程序,经监考老师确认后方可进行小车组装
(2)各功能所对应的按键由考生自行确定
(3)编写程序文件命名规贝力:DJKS身份证号。
1。