彩色公路地图道路自动获取的结构元素法
彩色城市栅格地图道路网络自动获取方法
(. 1 中国科学技术大学 自动化系 ,2 02 ,合肥 ; . 307 2 安徽工程大学 电气工程学院 , 40 0 安徽芜湖 ) 2 10 ,
摘 要 :为适 应栅格 地 图向 矢量地 图转化 的 需求 , 出一种从 彩 色城 市栅 格 地 图 自动 获取 道路 网络 提 的方 法~~ 道 路 获取对 象特征 法. 由于城 市栅 格 交通地 图 由道 路 、 区域及 噪 声 3类像 素 构成 , 以 所 新 方法 包括 3个 关键 步骤 : 首先利 用道 路 和 区域 的特征 进行 图像 规 范化 处理 , 即所有道 路 用一种 颜
色表 示 , 所有 区域 用另一种 颜 色表 示 , 图像 中其 他颜 色的像 素视 为噪 声 ; 次建 立 4种 噪 声分类 方 其
法来消除规 范化图像 中的噪声 ; 最后结合规 范化 图像和道路 的连通性 , 实施道路连接以获取 完整的
道路 网络. 与其他 方 法相 比 , 象特征 法对 地 图图像 的颜 色不敏 感 , 对 可从 多类 地 图 图像 中 自动 获取
.
wih o h r c lr r e a d d a os s a d f u os ls i c t n me s r sa e a o td t t t e o o s a e r g r e s n ie , n o rn ie ca sf a i a u e r d p e o i o ei n t h o s si h o m aie ma e Th oe r a ewo k i f al o sr ce y l mi ae t en ie n t e n r l d i g . z e wh l o d n t r S i l c n tu t d b n y
交通信息采集与处理技术概述

事件信息、车辆及驾驶员的状态信息、道路环境信息以
及交通动态管理控制信息等。(本书研究)
第4章 交通信息采集与处理技术
4.1 概述
4.2 交通信息采集技术 4.3 交通信息处理技术
4பைடு நூலகம்2.1 交通信息非自动采集技术
交通信息采集方法有人工记数法、试验车移动调查法 、摄影法、车辆检测器测定法、 GPS 浮动车法、手机定位 法、遥感图像处理等。 非自动采集技术 自动采集技术 非自动采集技术不具备自动采集的功能,采集过程依 赖人工操作,一般适用于做短期交通调查,不适用于实时 交通信息采集。 交通流量的非自动采集方法包括人工记数法、试验车 移动调查法和摄影法。
4.3.1 交通信息预处理技术
通的路段内现有的车辆数,计算该路段交通密度的方法。
摄影法又可分地面和航空摄影观测法。
4.2.2 交通信息自动采集技术
交通信息自动采集技术: 路基型交通信息采集技术 车基型交通信息采集技术 空基型交通信息采集技术 路基型交通信息采集技术 目前实用的路基型交通信息采集技术:
感应线圈检测器、超声波检测器、磁力检测器、红外 线检测器、微波雷达检测器、视频检测器、道路管检测 器、声学检测器等检测器法以及车辆牌照自动匹配法、 车辆自动识别法等。
背景估计及对 比函数确定
最小二乘结合
第4章 交通信息采集与处理技术
4.1 概述
4.2 交通信息采集技术 4.3 交通信息处理技术
4.3.1 交通信息预处理技术
交通信息的种类和采集形式各不相同,由于种种误差 的存在,在进一步处理和使用这些数据之前,首先必须对
其进行检索,排除错误数据。此外在实际的数据采集中,
4.2.1 交通信息非自动采集技术
速度的非自动采集方法包括了划线量测法、雷达测 速法、光电管法、摄影法、车辆牌照识别法、浮动车法、 跟车法等。划线量测法、雷达测速法、光电管法、摄影 法适用于地点车速的测量;车辆牌照识别法、浮动车法、
【CN109737976A】地图道路区间和车道线全自动生成方法【专利】

2
CN 109737976 A
权 利 要 求 书
2/2 页
5 .根据权利要求4所述的地图道路区间和车道线全自动生成方法,其特征在于,所述S3 步骤中 ,在所述边线曲线图上选择一所述边线中间位置或靠近中间位置的一点作为原点建 立所述第一坐标系;所述第一坐标系的所述原点的切线方向作为所述第一坐标系的x轴,以 竖直方向作为所述第一坐标系的y轴;将所述第一坐标系内与所述第一参考点在所述第一 坐标系中x轴坐标值相同的全部所述边线上的点的切线方向均值作为所述第一参考点的方 向;
自动生成方法 ,包括步骤 :S1 :获取形点采样数 据 ;S2 :预处理 ;S3 :计算第一参考点在第一坐标 系的坐标和方向 ;S4:记录第二坐标系与车道边 线交点数量 ;S5 :计算第二参考点在第一坐标 系 的坐标和方向 ;S6:记录第二坐标系与车道边线 的交点数量;S7:车道边线交点数量是否有变化; S8:选择新的第二参考点和第一参考点;S9:以两 新参考点建立两第二坐标系与车道外侧线的两 交点方向形成的夹角是否小于第一预设阈值 ; S10 :确定车道变化区间 ;S11 :判断是否结束。本 发明的一种地图道路区间和车道线全自动生成 方法 ,可完全自 动准 确生成道路区间 和车道线 , 且鲁棒性高、无需人工干预、效率高。
(74)专利代理机构 上海伯瑞杰知识产权代理有 限公司 31227
代理人 李庆
(51)Int .Cl . G01C 21/32(2006 .01)
(10)申请公布号 CN 109737976 A (43)申请公布日 2019.05.10
( 54 )发明 名称 地图道路区间和车道线全自动生成方法
( 57 )摘要 本发明提供一种地图道路区间和车道线全
权利要求书2页 说明书4页 附图1页
智能交通系统中道路标识线自动提取方法
对 滤 波 得 到 的 道路 点 云进 行 反射 强 度
口 rt ai S / o= .
参考 文献
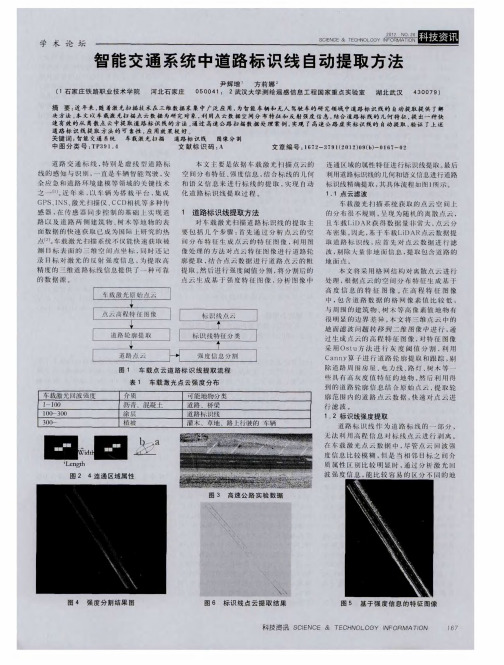
[】B c e , , Cu i ,ta .ma e p o 1 u h r T.C. ro e 1I g r - 高 程 反 射 强 度 类 似 的 地 物 。 些 错 误 的 分 2 实验 结果 这 本实 验 采 用 O t c 公 司 的 激 光 扫描 系 p eh c s i nd be vi an ng f r n- esng a ha or pl ni o i 割 点 主 要 是 一 些 低 矮 的 植 被 。 文 将 强 度 本 统 L n Mo i Ma p r 供 的高速 公路数 yx bl e p e提 分 割 后 的 点 云 生 成 基 于 强 度 的特 征 图 像 , tlg n e i e[ . E rn a t n e ie tv hc s ]I E T a s ci s l l J E o 如 )扫描 范 围大致 为 9 0 6 m, 0 m* 0 共 利 用 道 路 标 线 的 几 何 语 义 特 征 进 行 提 取 。 据 ( 图3 , o Id sra E eto is 2 0 ,0 1 : n n u til lcr nc , 0 3 5 () ,6 7 3 62—75. 对 于 道 路 标 线 , 文 作 如 下 描 述 来进 行 提 3 8 2, 5 个 数据 点 。 本 首 先 对 道 路 强 度 信 息 进 行 直 方 图 统 []杨必 胜 , 取 。 2 魏征 , 清 泉 , . 向车载 激 光 李 等 面 计 , 得 高 速 公 路 的强 度 阈 值 为 1 0 并 结 获 , 3 扫描 点云快 速 分 类 的点 云 特征 图像 生 成 ( ) 线 总 是 出现 在 道 路 区 域 之 内 。 1标 合 局 部 范 围 高 程 阈 值 对 道 路 点 云 进 行 分 ( ) 线有 规 则 的长 宽 。 2标 方法【 . J 测绘学报 ,00 3()50 4 . ] 2 1 ,95:4-55 强度 分 割 结 果 如 图4 示 。 所 ( ) 一 条 直 线 上 必 须 有 大 干 3 的 标 割 , 3同 个 【】Ya g, , a g, , , a d L ,J 3 n B. F n L.U Q.n i … 经 过 上 面 的 分 割 后 , 包 括 大 量 和 道 还 Au o a e e r c i n t m td xt a to of r a o d m a k- r 线段, 并且 等 间 隔 分 布 。
路面识图知识点总结整理
路面识图知识点总结整理一、路面识图的基本原理1.图像获取:通过摄像头获取道路、车辆和行人等的图像数据。
2.图像预处理:对图像进行去噪、灰度处理、边缘检测等操作,以提高后续图像识别的准确性。
3.特征提取:从图像中提取出具有代表性的特征,比如车辆的颜色、形状和轮廓等特征。
4.目标识别:利用机器学习、神经网络等技术对图像中的目标进行识别和分类。
5.目标跟踪:对目标进行连续跟踪,实时更新目标的位置和状态信息。
6.数据分析:对识别和跟踪的数据进行分析,提取有用的信息用于智能交通管理和车辆导航等应用。
二、路面识图的技术方法1.传统图像处理方法:包括模板匹配、边缘检测、特征提取等基于图像处理技术的方法,对图像进行分析和识别。
2.机器学习方法:包括支持向量机、决策树、K近邻等传统机器学习方法,以及深度学习、卷积神经网络等深度学习方法,通过对大量图像数据的学习和训练实现目标识别和跟踪。
3.目标检测方法:包括Haar特征、HOG特征、YOLO算法等针对目标检测和定位的方法,能够实现对道路、车辆和行人等目标的高效识别。
三、路面识图的应用领域1.智能交通系统:通过对道路上车辆和行人的识别和跟踪,实现交通流量统计、车辆违章检测、交通拥堵预警等功能,提高交通管理的智能化水平。
2.自动驾驶汽车:利用路面识图技术实现对道路条件、交通标志和其他车辆的感知和识别,为自动驾驶汽车提供决策和控制的依据。
3.智能停车系统:通过对停车场内车辆的识别和跟踪,实现车位监测、停车引导、车辆识别等功能,提高停车管理的智能化水平。
四、路面识图的挑战与展望1.图像质量变化:在实际道路场景中,由于光照、天气等因素影响,道路图像的质量会发生变化,增加了图像识别的难度。
2.多目标复杂背景:道路上同时存在多种车辆和行人,以及各种背景干扰,需要识别算法具有较强的抗干扰能力。
3.实时性要求:在智能交通系统和自动驾驶汽车等应用中,对路面识图的实时性要求较高,需要算法能够快速准确地对目标进行识别和跟踪。
彩色地图中道路的识别和提取
0 引 言
随着 计 算 机 与 信 息 技 术 的 迅 猛 发 展 ,人 们 对 地 图信 息 自 动 处 理 的 需 求 日益 广 泛 和 迫 切 ,地 理 信 息系 统 等 实 用 系 统 正 在 逐 步 发 展 与 完 善 。 谓 地 理 信 息 系 统 go r h iomao 所 (ega i n r tn pc f i ss m,G S是 一 种 集 地 理 信 息 获 取 、 储 、 理 、 析 和 输 出 yt e I) 存 管 分 为 一 体 的 空 间 信 息 系 统 , 由 计 算 机 硬 件 、 件 、 理 信 息 和 它 软 地 用 户 4大 要 素 构 成 。 介 于 信 息科 学 , 间 科 学 和 地 球 科 学 之 是 空 间 的 交 叉 学 科 。它 在 资 源 管 理 、 地 规划 、 事 、 业 、 通 等 土 军 商 交 领 域 得 到 了广 泛 的应 用 。其 中 ,城 市 交 通 地 图信 息 的 识 别 和 提 取 是 地 理 信 息 系 统 的 基 础 ,而 城 市 交通 地 图 中道 路 信 息 的 识 别 和 提 取 又 是 地 理 信 息 识 别 和 提 取 的一 个 重 要 组 成 部 分 。
Ke r s r a x a t n c r u a e e ; d src a kn ; t i n n ; v c o i a i n ma e ai a o h l g ywo d : o d e t ci ; ic l d g e r o r r it t r i g i m hn ig e t rz t ; o h t m t l r oo 卷 第 1 期 8 1
V oI 28 . N O I1 .
计 算 机 工 程 与设 计
Co mp t rEn i e r g a d De i n u e g n e n n sg i
数学形态学多结构元素的道路提取
2 1 ,6 1 ) 2 3 0 0 4 ( 1 3
数学形态学 多结构 元素 的道路提 取
潘建平 1李 , 治2
P in pn L h AN Ja - ig , I Z i
1 . 重庆交通大学 土木建筑学院 , 重庆 4 0 7 004
2广东珠海市国土测绘大队 , . 广东 珠海 5 9 1 05 1
不 同 的结 构 元 素进 行 道 路 边 缘 提 取 。 实验表 明 , 算 法 具 有 良好 的道 路 提 取 能 力 。 该 关键 词 : 学形 态 学 ; 路 提 取 ; 数 道 多结构 元 素
DO :0 7 8 .s. 0 — 3 1 0 01. 1 文章编号 :0 2 8 3 (0 0 1— 2 3 0 文献标识码 : 中图分类号 :2 8 I 1. 7  ̄i n1 2 8 3 . 1 .1 7 3 s 0 2 0 10 — 3 12 1 )1 0 3 — 3 A P0
E m i p 2. r :p n cn
P AN in pn , i a x r cin b s d o lisr cu e ee n fma h maia o p oo yCo p tr En ie rn Ja - ig LIZh. d e ta to a e n mut tu t r lme to t e tc lm r h lg . m ue gn e ig Ro -
K e wor s: ma h m aia m o h l g ;o d xr c in; y d t e tc l p r oo y r a e ta to muli t cur l lmen s t—sr t a ee u t
摘
要 : 出了一种从遥感 图像 中提取道路 的有效算法。该算法在数 学形 态学的基础上 , 提 针对 图像 中噪声和边缘形 态的不 同选择
智能交通系统中道路标识线自动提取方法

智能交通系统中道路标识线自动提取方法摘要:近年来,随着激光扫描技术在三维数据采集中广泛应用,为智能车辆和无人驾驶车的研究领域中道路标识线的自动提取提供了解决方法。
本文以车载激光扫描点云数据为研究对象,利用点云数据空间分布特征和反射强度信息,结合道路标线的几何特征,提出一种快速有效的从离散点云中提取道路标识线的方法。
通过高速公路扫描数据处理案例,实现了高速公路虚实标识线的自动提取,验证了上述道路标识线提取方法的可靠性,应用效果较好。
关键词:智能交通系统车载激光扫描道路标识线图像分割道路交通标线,特别是虚线型道路标线的感知与识别,一直是车辆智能驾驶,安全应急和道路环境建模等领域的关键技术之一[1]。
近年来,以车辆为搭载平台,集成GPS、INS、激光扫描仪、CCD相机等多种传感器,在传感器同步控制的基础上实现道路以及道路两侧建筑物、树木等地物的表面数据的快速获取已成为国际上研究的热点[2]。
车载激光扫描系统不仅能快速获取被测目标表面的三维空间点坐标,同时还记录目标对激光的反射强度信息,为提取高精度的三维道路标线信息提供了一种可靠的数据源。
本文主要是依据车载激光扫描点云的空间分布特征、强度信息,结合标线的几何和语义信息来进行标线的提取,实现自动化道路标识线提取过程。
1 道路标识线提取方法对车载激光扫描道路标识线的提取主要包括几个步骤:首先通过分析点云的空间分布特征生成点云的特征图像,利用图像处理的方法对点云特征图像进行道路轮廓提取,结合点云数据进行道路点云的粗提取。
然后进行强度阈值分割,将分割后的点云生成基于强度特征图像,分析图像中连通区域的属性特征进行标识线提取。
最后利用道路标识线的几何和语义信息进行道路标识线精确提取。
1.1 点云滤波车载激光扫描系统获取的点云空间上的分布很不规则,呈现为随机的离散点云,且车载LiDAR获得数据量非常大,点云分布密集。
因此,基于车载LiDAR点云数据提取道路标识线,应首先对点云数据进行滤波,剔除大量非地面信息,提取包含道路的地面点。
测绘技术中的道路规划图制作技巧

测绘技术中的道路规划图制作技巧道路规划图是现代测绘技术中非常重要的组成部分,它为城市规划、交通规划等提供了重要的参考依据。
在测绘技术的发展过程中,道路规划图制作技巧也得到了不断的改进和完善。
本文将从数据采集、图件绘制和图件修饰三个方面,介绍测绘技术中的道路规划图制作技巧。
一、数据采集道路规划图的制作首先需要进行地理数据的采集工作。
传统的数据采集方法主要依赖于人工测量和纸质地图的查询,但这种方法存在着工作量大、难以精确、周期长等弊端。
随着现代技术的发展,无人机、全景摄影和地理信息系统等工具的应用,大大提高了数据的采集效率和精度。
无人机可以飞行到不同的高度和角度,通过拍摄一系列照片,可以获取较为真实的地面信息。
全景摄影技术可以将光学相机和激光测距仪相结合,实现地面三维模型的获取。
地理信息系统通过对多源数据进行整合和分析,可以提供更加全面和准确的数据支持。
二、图件绘制图件绘制是道路规划图制作的核心环节,它需要准确地将采集到的地理数据转化为图面上的图形。
在图件绘制过程中,应尽量保证道路的线型、标注和文字的清晰度。
为此,测绘人员需要熟练掌握绘图软件的使用技巧,同时也需要对道路、地貌等基础知识有着深入的了解。
在图件绘制中,可以采用自动化绘图工具进行辅助绘制。
自动化绘图工具可以根据采集到的数据进行智能化图形生成,提高了绘图的效率。
此外,对于复杂的地貌和道路交叉口等情况,可以使用CAD等软件进行三维建模,更好地展示地理信息。
三、图件修饰图件修饰是为了增强道路规划图可读性和美观度而进行的一系列工作。
道路规划图的修饰需要注意图件的对比度、色彩搭配和标注的规范性。
对于道路的颜色分类和图例的设计,可以根据实际情况进行调整,以便读者更好地理解和识别。
此外,道路规划图的布局也需要注意。
合理的布局可以更好地体现图件的层次感和逻辑结构。
对于重要的道路和标注,可以采用加粗和高亮的方式进行突出,从而更好地引导读者的注意力。
总结起来,测绘技术中的道路规划图制作技巧是一个综合性的工作,需要从数据采集、图件绘制和图件修饰三个方面进行把控。
公路路线平面图自动分幅出图方法
பைடு நூலகம்
公路路线平面图自动分幅出图方法
舒玲霞, 蒋红斐
(中南大学土木建筑学院, 湖南 长沙 410075)
摘 要: 针对公路路线平面图分幅问题, 在 A u toCA D 环境下, 运用 C + + 语言 编制了实现平 面图自动 分幅的程 序。运用该程
序可快速、准确地将线路分幅绘出, 且能充分利用图纸, 使图纸的布局较为美观, 同时绘图效率也有了较大提高。 关键词: 公路; 平面图; 回归分析
中图分类号: U 412. 33
文献标识码: B
文章编号: 1008- 3707( 2006) 01 - 0061- 03
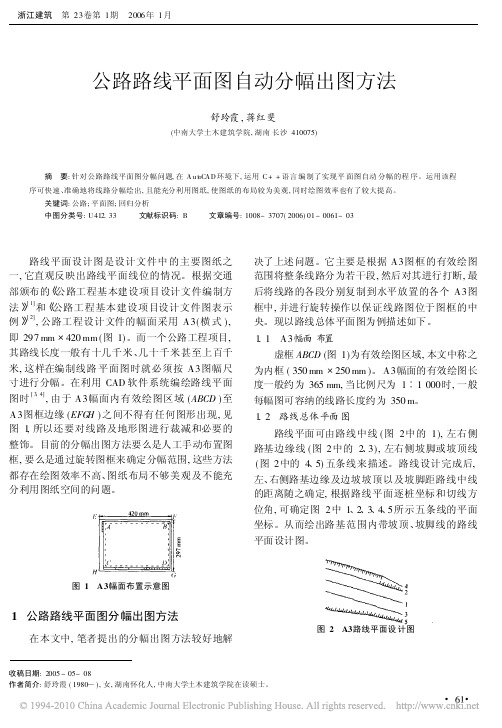
路线平面设计图是设计文件中 的主要图纸之 一, 它直观反映出路线平面线位的情况。根据交通 部颁布的 公路工程基本建设项目设计文件编制方 法 ![ 1] 和 公路工程基本建设项目设计文件图表示 例 ![ 2] , 公路工程设计文件的幅面采用 A 3( 横 式 ) , 即 297 mm ∀ 420 mm ( 图 1) 。而一个公路工程项目, 其路线长度一般有十几千米、几十千米甚至上百千
中取 350 m ) 大致估计有效绘图区域 ABCD 内能放 下的点数作为 N 的值。若每隔 20 m 设一桩点, 则 N
的初始值可取 18( 350 /20)。 根据前面所取的 N 对点确定该段线路的宏观
走向。由于公路一般线路较长, 线型多变, 其间有很 多弯道, 因此在分幅绘制时应首先确定每幅图内线
C rossingPo lygonSelectEnt ities( int nP oints, adspo int* P oints, ads- nam e& SelSet)
高分辨率遥感影像道路信息提取方法研究

三、 道路信息提取方法研究
1. 理论基础 目前对于道路提取的方法主要分为自动和半 自动两大类。 自动道路提取方法是通过认识和理 解道路影像特征, 自动准确定位道路的位置; 半自 动道路提取利用人机交互式进行, 其主要思路是人 工提供道路的初始( 种子点 ) , 有时还需提供初始方 然后计算机再根据一定的规则进行处理识别 , 向, 有时还需要进行适当的交互, 保证识别的准确性。 半自动 道 路 提 取 一 般 可 以 分 解 成 4 个 步 骤: ① 道路影像特征增强; ② 确定道路的种子点; ③ 跟 踪和扩展种子点, 形成道路段; ④ 连接道路段, 形成 道路网
图5
开运算结果影像
3 ) 经过上述处理仍然存在难以去除的噪声以 及道路的断线现象。 如果再多次进行开运算可以 去除孤立的噪声, 但也会出现道路的断线更加严重 的现象。基于此, 本文利用面积阈值以及形状指数 对噪声作进一步消除。 计算形状指数的表达式为 sqrt ( [ AREA] / [ PERIMETER ] ) 。 经过多次试验
图1
纠正后的研究区影像
该影像 IKONOS 的参数为: 成像波段: 波段( 单波 0. 64 ~ 0. 72 μm, 段) 3( 红色) , 空间分辨率: 4 m; 成
0525 收稿日期: 2011作者简介: 胡张武( 1976 —) , 男, 安徽桐城人, 工程师, 研究方向为 GIS 原理与应用。
16
测
绘
通
报
2011 年
第8 期
选择得到 的 表 达 式 为“zhishu ” > 0. 08 AND “zhishu” < 0. 1 , 从而利用其表达式进行除噪。 将选择 的数据导出, 结果发现仍然有部分块状图斑无法除 主要是图斑过于不规则使形状指数过小。 而辅 去, 以面积阈值进行剔除效果则较好。 经过上述处理, 对与道路相连的, 面积较大、 难以去除的部分, 则采 然后经过面积形 用手工编辑的方法分割成多边形, 状指数处理得到矢量图, 如图 6 所示。
地图中道路的自动识别与重建
地图中道路的自动识别与重建的报告,800字
地图的自动识别与重建技术是近年来发展极为迅速的一个领域,其目标是根据对实际道路网络的计算机图像分析,在显示地图和定位系统中重建准确的道路网络,从而帮助改善日常交通规划、公共安全、资源管理等。
此外,有效地分析和重建道路网络不仅有利于政府部门,而且也可以为用户提供方便。
在计算机视觉技术的支持下,自动识别与重建的道路网络可通过两种不同的方法实现,即实时现场识别和异步重建。
实时现场识别将使用车辆和行人或其他移动物体传感器,通过实时图像分析,实现对道路图像中边缘和特征点的实时识别,并按比例重建准确的道路网络。
它可以对实时事件进行实时分析,从而准确地分析出道路的特征,包括路的方向、路的类型、宽度等。
另一种重建技术,即异步重建,则是将收集的历史道路信息,如影像、测量点、路况状况等,存储在数据库中,并通过深度学习和机器学习等技术,结合道路特征提取算法,对地图进行建模,实现对既有道路网络的更新与重建。
不管是实时现场识别,还是异步重建,两者都能够实现高精度、灵活性高的道路重建效果。
实时现场识别可以实时解决交通管理和定位系统中出现的问题,而异步重建也可以大大提高系统的智能化水平,这对于政府部门以及用户都有巨大的好处。
总之,自动识别与重建的道路网络技术是当前发展极其迅速的一个新兴领域,它可以带来巨大的便利和改善。
其利用计算机
视觉技术,可以根据真实的道路网络图像,实现准确的道路网络重建,从而帮助改善日常交通规划、公共安全、资源管理等问题,惠及政府和用户。
道路曲线要素自动生成
道路曲线要素自动生成1. 背景介绍道路曲线是指道路在平面上的变化,包括曲线的形状、半径、长度等要素。
在道路设计和规划中,准确地生成道路曲线是非常重要的一步。
传统的道路曲线生成方法需要依赖专业人员手动计算和设计,耗时耗力且容易出错。
为了提高效率和准确性,自动化的道路曲线要素生成成为一个研究热点。
2. 目标与意义自动生成道路曲线要素的目标是通过计算机算法自动生成符合设计要求的道路曲线。
这样可以大大提高道路设计的效率和准确性,减少人为错误的出现。
自动化生成道路曲线要素对于道路规划和设计工作具有重要的意义。
3. 方法与技术3.1 数学模型道路曲线生成需要建立数学模型来描述道路的形状和要素。
常用的数学模型包括圆曲线模型、布尔曲线模型等。
这些模型可以通过一系列参数来描述道路的形状,如曲线半径、曲线长度、曲线起点和终点等。
3.2 数据采集与处理道路曲线生成需要大量的地理数据来支持计算和分析。
这些数据可以通过现场测量、遥感技术和地理信息系统等手段获取。
然后,需要对这些数据进行处理和分析,提取出道路的关键要素,如道路宽度、坡度、土壤类型等。
3.3 算法设计与实现道路曲线生成算法是实现自动化生成的核心。
这些算法可以基于已有的数学模型和数据进行设计。
常用的算法包括最小二乘法、贝塞尔曲线拟合、遗传算法等。
这些算法可以通过计算机程序来实现,实现自动化生成道路曲线要素的功能。
4. 实现步骤4.1 数据预处理首先,需要对采集到的地理数据进行预处理。
这包括数据清洗、数据对齐、数据转换等操作。
通过预处理,可以将原始数据转换为计算机可以处理的格式。
4.2 数学模型建立在数据预处理完成后,需要根据道路设计要求建立数学模型。
根据道路的形状和要素,选择合适的数学模型,并确定模型的参数。
4.3 算法设计与实现根据建立的数学模型,设计并实现道路曲线生成算法。
算法的设计需要考虑道路要素的约束条件,如最大坡度、最小曲线半径等。
通过算法,可以自动计算出符合要求的道路曲线要素。
城市交通路网图自动提取技术研究

城市交通路网图自动提取技术研究城市的交通路网是城市交通的重要组成部分,而交通路网图作为交通网络的可视化表示,对于城市规划、交通管理以及交通研究都有着重要的作用。
然而,传统的手工绘制和修正的方法已经很难适应现代城市快速发展的需求。
因此,开发一种能够自动提取城市交通路网图的技术已经成为了当今研究热点之一。
一、现有技术与挑战在现有的技术中,卫星遥感技术、地理信息系统(GIS)和计算机视觉技术是用于提取城市交通路网图的主要手段。
其中,卫星遥感技术可以获取城市交通路网的基本信息,如道路宽度、长度和形状等,但卫星遥感图像分辨率不足以提取更为准确的路网信息。
而GIS数据可以提供大量的城市公共设施信息,但是这些数据通常缺乏准确的道路宽度和路线信息。
计算机视觉技术在提取道路信息方面表现良好,但是随着城市路网复杂度的增加,往往需要专业人员进行手动校验,工作量巨大且耗时。
另外,城市交通路网图的复杂度也是技术发展的一大挑战。
城市道路信息的种类多样,各种复杂结构交错在一起,对于道路宽度、车道数量、封闭环路等信息的精准提取要求技术更高的准确度和鲁棒性,以满足实际应用需求。
二、新技术的探索作为现代计算机图像处理和人工智能技术的重要分支,深度学习技术在自动提取城市交通路网图方面具有很大潜力。
深度学习以其独特的优势,可以有效解决人工标注数据中存在的问题,如时间成本和标注精度等方面的问题。
在深度学习技术的应用中,卷积神经网络(Convolutional Neural Network, CNN)可以通过不同分辨率输入图像的不断卷积和下采样,抽取出特定的多尺度特征,在城市交通路网图的自动提取中具有很大的优势。
此外,区域生成对抗网络(Generative Adversarial Networks,GAN)也被广泛应用于城市交通路网图自动提取任务中,它能够利用对抗机制不断优化生成样本,提高自动提取的精确度和有效性。
三、未来展望随着计算机视觉和人工智能技术的不断发展,城市交通路网图自动提取技术也将不断得到优化和进步。
彩色公路交通地图图像道路提取
彩色公路交通地图图像道路提取
海涛;鲍远律
【期刊名称】《计算机工程与应用》
【年(卷),期】2009(45)12
【摘要】据彩色公路交通地图的图像特征,提出一种新颖的道路识别与提取方法.这种方法包括三个关键步骤.首先,根据区域的特征,提取出区域的灰度值;其次,根据道路的颜色和形状特征以及数字图像处理的一些方法(如对象的连通成分等),识别并提取出道路的颜色;最后,为了获得完整的道路网络,一些道路连接方法被提出.这种算法已经被应用于许多彩色公路地图图像中去提取道路网络.大量成功的实例表明这个算法是非常有效的.
【总页数】3页(P190-192)
【作者】海涛;鲍远律
【作者单位】安徽工程科技学院,电气工程系,安徽,芜湖,241000;中国科学技术大学,自动化系,合肥,230026
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.交通地图上公路交通网的表示方法规范化的探讨 [J], 杨列平
2.交通地图图像中道路识别与道路信息提取 [J], 李洋;张晓冬;鲍远律
3.彩色栅格公路交通地图道路提取的邻域方法 [J], 海涛;丛爽;鲍远律
4.彩色栅格交通地图图像中道路识别与提取 [J], 海涛;鲍远律
5.彩色城市交通地图的道路识别与提取 [J], 詹曦
因版权原因,仅展示原文概要,查看原文内容请购买。
导航电子地图中的路口聚合模型与方法
1)互通式立交桥 如图6所示。红点为GSC点, 标明南北向的主路在上与东西向 的道路是立体交叉,路口聚合只需 对南北向的辅路与东西向的下层 道路做聚合,四个黑色结点聚合为 一点。这种互通式立交桥在桥身处 上、下层道路是没有匝道连通的。 2)右旋式立交桥 如图7所示,南北走向的三环
①多条路段会聚一个结点时 交通流“只出不进”或“只进不出”, 造成规划的死路,如图1所示。
③弧段的开始和结束结点位 置相同,造成在这个弧段附近始终 兜不出该弧段的圈,如图3所示。
图3闭环路 Fig一3 Closed loop
2)路网具有合理的分层性 在路径计算中,若将所有弧段 和结点都平等对待,会由于计算量 庞大而导致效率低下,因此路网必 须按照重要度分层,远距离规划使 用高等级道路实施,近距离规划则 采用全部路网实施。路网分层和 DC合并解决的是远距离规划使用
②孤立路段或孤岛式的局部 路网,造成无法到达这些孤立的道 路或岛状小路网附近,如图2所示。
和概括,越往高层路网,越需要忽 略一些不重要的细节,层次越高, 所包含的结点和弧段越少。设最高
层为4级,最低层
不变,这就大大减少了参与计算的 点和弧数量,提高了计算效率。路 口聚合解决了忽略细部、快速计算 的难点问题。
The Method and Model of Integrated Intersection in Navigational Electronic Map
LI Hong-li,ZHANG Sen,SHENG Xiu-jie,DU Kun,MA Wei (Beijing Chang¥Mapping Technologies Co.Ltd,Beijing 10043,Chi眦)
道路工程图读图画图技巧
道路工程图的读图和画图技巧简介道路工程是一个复杂的过程,需要多种技能和知识来完成,其中读图和画图技巧是必不可少的一环。
本文主要介绍在道路工程中,如何正确地读图和画图,以及一些技巧和注意事项。
道路工程图的读图技巧熟悉图例图例是道路工程图中的一项重要元素,图例中包含了各种不同的符号和线型,这些符号和线型代表了不同的建筑材料、设备和结构等。
因此,熟悉图例可以提高读图的效率和准确性。
熟悉不同类型的图在道路工程图中,常见的类型包括平面图、剖面图、断面图等等。
每种图都有其特殊的含义和用途,因此在读取图纸时应该根据需要选择合适的图来查看。
注意比例尺和标注比例尺和标注是道路工程图中的两个重要元素。
比例尺可以帮助读者了解图中元素的实际尺寸,标注则提供了更多细节和关键信息。
因此,在读取图纸时要特别注意比例尺和标注的内容。
道路工程图的画图技巧熟悉标准和规范在道路工程图中,有很多标准和规范需要遵循,例如材料规格、工艺要求等等。
因此,画图员需要熟悉这些标准和规范,以确保图纸的准确性和可靠性。
注意比例和线型在画图时,比例和线型至关重要。
不同的元素应该按照正确的比例绘制,线型也应该符合规范和标准。
此外,在绘制图纸时,应该保持图纸的整洁和简明。
熟练掌握绘图工具熟练掌握绘图工具是画图员的基本技能之一,因此需要花费时间和精力来学习和练习。
在选择绘图工具时,应该根据需要和个人喜好来选择合适的工具。
结论本文介绍了在道路工程中,正确地读图和画图的技巧和注意事项。
熟悉图例、比例尺和标注是正确读图的必要条件,同时应该根据需要选择合适的图来查看。
画图时,应该熟悉标准和规范,注意比例和线型,以及熟练掌握绘图工具。
希望这些技巧能够帮助读者更好地完成道路工程图的读取和绘制。
自动驾驶综述:定位、感知、规划常见算法汇总
⾃动驾驶综述:定位、感知、规划常见算法汇总⾃驾车⾃动驾驶系统的体系结构⼀般分为感知系统和决策系统。
感知系统⼀般分为许多⼦系统,负责⾃动驾驶汽车定位、静态障碍物测绘、移动障碍物检测与跟踪、道路测绘、交通信号检测与识别等任务。
决策系统通常也被划分为许多⼦系统,负责诸如路径规划、路径规划、⾏为选择、运动规划和控制等任务。
1.⾃动驾驶汽车体系结构概述这⼀部分概述了⾃动驾驶汽车⾃动化系统的典型体系结构,并对感知系统、决策系统及其⼦系统的职责进⾏了评述。
下图显⽰了⾃动驾驶汽车系统的典型架构框图,其中感知和决策系统显⽰为不同颜⾊的模块集合。
感知系统负责使⽤车载传感器捕获的数据,如光探测和测距(LIDAR)、⽆线电探测和测距(雷达)、摄像机、全球定位系统(GPS),惯性测量单元(IMU)、⾥程表,以及有关传感器模型、道路⽹络、交通规则、汽车动⼒学等的先验信息的决策。
决策系统负责将汽车从初始位置导航到⽤户定义的最终⽬标,考虑到车辆状态和环境的内部表现,以及交通规则和乘客的舒适度。
为了在整个环境中导航汽车,决策系统需要知道汽车在其中的位置。
定位器模块负责根据环境的静态地图估计车辆状态(姿态、线速度、⾓速度等)。
这些静态地图在⾃动操作之前⾃动计算,通常使⽤⾃动驾驶汽车本⾝的传感器,尽管需要⼿动注释(即⼈⾏横道或红绿灯的位置)或编辑(即移除传感器捕获的⾮静态物体)。
⾃动驾驶汽车可以使⽤⼀个或多个不同的离线地图,如占⽤⽹格地图、缓解地图或地标地图,进⾏定位。
定位模块接收离线地图、传感器数据和平台⾥程计作为输⼊,并⽣成⾃动驾驶汽车的状态作为输出。
需要注意的是,虽然GPS可能有助于定位控制器的处理,但由于树⽊、建筑物、隧道等造成的⼲扰,使得GPS定位不可靠,仅GPS在城市环境中进⾏适当的定位是不够的。
映射器模块接收离线地图和状态作为输⼊,并⽣成在线地图作为输出。
该在线地图通常是离线地图中的信息和使⽤传感器数据和当前状态在线计算的占⽤⽹格地图的合并。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
”( 国科 学 技 术 大 学 自动 化 系 中 合肥 202 ) 3 0 7
( 徽 工 程 大 学 电气 工 程 学 院 芜 湖 2 1 0 ) 安 4 0 0
( a h i U t. d to a@ SC e u)
摘 要 :为 了 适 应 栅 格 地 图 向矢 量 地 图转 化 的 需 求 , 出 一 种 彩 色 公 路 地 图 道 路 自动 获 取 的 结 构 元 素 方 法 该 方 法 提
意 缩 放 、 失 真 、 于 全 局 或 局 部 校 正 口 以 , p I 如 c f , pno Ma G S等 ) 行 半 自动 人 工 n 进 矢 量 化 , 工 作 量 相 当 巨 大 , 且 对 于 彩 色 地 图 的 其 并 矢 量化而 言 , 自动 化 水 平 还 比较 低 . 彩 色 栅 格 地 将
.
s e . Fis , a lr g on pi e s a e r c gn z d au o a ia l t ps r t l e i x l r e o ie t m tc ly, a h n s t t o o s oft r c gn z d nd t e e he c l r he e o ie
.
s pe i iy ofo e ho s il ta e h ou he c m p rs n w ih o he xitng m e h u rort ur m t d i lus r t d t r gh t o a io t t re s i t od
pi e s a x l s whie The l r d r c u r d by c m p e e y ei i tn ie oft e o u h a e t. n a l oa s a e a q i e o l t l l na i g no s he r gi n s c s t xt m
M a s p
H a o ’ . Con hua g” .an o Y ua l iTa gS n d Ba n u”
”( p t 7 厂一 t mato De arme1 t 4uo in,Un v riy o S in ean Te h o o ie st f ce c d c n lgy Ch n i a,He e 2 0 2 / i 3 0 7)
.
包 括 2个 关键 步 骤 : 一 步 自动 识 别 所 有 的 区域 像 素 并 且 将 其 全 部 置 于 白色 ; 二 步 通 过 完 全 消 除 区 域 中 的文 字 图 第 第
、
标 等 噪 声 来 获 取 道 路 . 了 说 明 文 中方 法 的有 效 性 , 其 应 用 到 一 大 类 彩 色 公 路 地 图 , 通 过 与 已有 方 法 的 对 比说 为 将 并
z st o /) t k o t Elcr ̄ lEn n e i g,A n iPoytc n cUn v r i3,Wu 2 1 0 ) j e tia gie rn hu l e h i i e st ku 4 0 0
Ab ta t sr c :T o m e tt e a ft a t r v c o on e son,a s r t a l m e e h spr po e e he d m nd o her s e — e t r c v r i t uc ur lee ntm t od i o s d
明了其优越性.
关 键 词 : 格 地 图 ; 量 地 图 ; 构 元 素 ; 路 自动 获 取 栅 矢 结 道
中 图 法分 类 号 :TP 9 _ 1 3 l 4
A t u t r lEl m e e h d o a t m a i q i ii n f o g wa l r S r c u a e ntM t o fRo d Au o tc Ac u s to r m Hi h y Co o
whi h c n a o tc ly a qu r o ds f o hi c a ut ma ia l c ie r a r m ghwa ol r m a s Th o s d me h s wo y c o p e pr po e t od ha t ke v
第 2 3卷第 l O期
21 0 1年 1 0月
计 算 机 辅 助 设 计 与 图形 学 学 报
C mp t r Ai e sg & Co u e o u e — d d De i n mp t r
Vo. o 0 1 23 N .1 Oc . 20l t l
彩 色 公 路 地 图 道 路 自动 获 取 的 结 构 元 素 法
a c ns O u e ho i a ple t a l s of i nd i o . r m t d s p i d o c a s h ghwa o o a t v rf is fe tv ne s T he y c l r m ps o e iy t e f c i e s
.
Ke r : r s e a y wo ds a t rm p; v c o a e t r m p; s r t a l m e t;r a ut a i c uiii t uc ur le e n o d a om tca q s ton
与栅 格地 图相 比 , 矢量 地 图具 有数 据量 小 、 可随