Canny算子提取边缘Matlab源代码
图像边缘检测各种算子MATLAB实现以及实际应用
《图像处理中的数学方法》实验报告学生姓名:赵芳舟教师姓名:曾理学院:数学与统计学院专业:信息与计算科学学号:联系方式:梯度和拉普拉斯算子在图像边缘检测中的应用一、数学方法边缘检测最通用的方法是检测灰度值的不连续性,这种不连续性用一阶和二阶导数来检测。
1.(1)一阶导数:一阶导数即为梯度,对于平面上的图像来说,我们只需用到二维函数的梯度,即:,该向量的幅值:,为简化计算,省略上式平方根,得到近似值;或通过取绝对值来近似,得到:。
(2)二阶导数:二阶导数通常用拉普拉斯算子来计算,由二阶微分构成:2.边缘检测的基本思想:(1)寻找灰度的一阶导数的幅度大于某个指定阈值的位置;(2)寻找灰度的二阶导数有零交叉的位置。
3.几种方法简介(1)Sobel边缘检测器:以差分来代替一阶导数。
Sobel边缘检测器使用一个3×3邻域的行和列之间的离散差来计算梯度,其中,每行或每列的中心像素用2来加权,以提供平滑效果。
-1-21000121-101-202-101(2)Prewitt边缘检测器:使用下图所示模板来数字化地近似一阶导数。
与Sobel检测器相比,计算上简单一些,但产生的结果中噪声可能会稍微大一些。
-1-1-1000111-101-101-101(3)Roberts边缘检测器:使用下图所示模板来数字化地将一阶导数近似为相邻像素之间的差,它与前述检测器相比功能有限(非对称,且不能检测多种45°倍数的边缘)。
-10010-110(4)Laplace边缘检测器:二维函数的拉普拉斯是一个二阶的微分定义:0101-41010(八邻域)(5)LoG边缘检测器由于噪声点(灰度与周围点相差很大的像素点)对边缘检测有一定的影响,所以效果更好的是LoG算子,即Laplacian-Guass算子。
引入高斯函数来平滑噪声:该函数的Laplace算子:它把Guass平滑滤波器和Laplace锐化滤波器结合起来,先平滑掉噪声,再进行边缘检测,所以效果比单用Laplace算子要更为平滑,效果更好。
canny边缘检测matlab代码
canny边缘检测matlab代码Canny边缘检测是一种常用的图像处理算法,它可以有效地检测图像中的边缘,并将其显示为白色线条。
在Matlab中,可以使用以下代码实现Canny边缘检测:1. 读取图像首先,需要读取待处理的图像。
可以使用imread函数来读取图片:```matlabimg = imread('image.jpg');```其中,image.jpg是待处理的图片文件名。
2. 灰度化Canny算法只能处理灰度图像,因此需要将彩色图像转换为灰度图像。
可以使用rgb2gray函数来实现:```matlabgray_img = rgb2gray(img);```3. 高斯滤波在进行边缘检测之前,需要对图像进行高斯滤波来消除噪声。
可以使用fspecial和imfilter函数来实现:```matlabgaussian_filter = fspecial('gaussian', [5 5], 1);blur_img = imfilter(gray_img, gaussian_filter, 'replicate');```其中,[5 5]表示高斯核的大小为5x5,1表示标准差。
4. 计算梯度幅值和方向接下来,需要计算每个像素点的梯度幅值和方向。
可以使用Sobel算子来计算梯度,并利用arctan函数计算方向角度:```matlabsobel_x = [-1 0 1; -2 0 2; -1 0 1];sobel_y = [-1 -2 -1; 0 0 0; 1 2 1];grad_x = imfilter(blur_img, sobel_x, 'replicate');grad_y = imfilter(blur_img, sobel_y, 'replicate');grad_mag = sqrt(grad_x.^2 + grad_y.^2);grad_dir = atan(grad_y ./ grad_x);```5. 非极大值抑制由于Sobel算子计算出的梯度幅值可能会有多个峰值,因此需要进行非极大值抑制来保留边缘。
数字图像处理matlab代码
一、编写程序完成不同滤波器的图像频域降噪和边缘增强的算法并进行比较,得出结论。
1、不同滤波器的频域降噪1.1 理想低通滤波器(ILPF)I1=imread('eight.tif'); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);figure,subplot(1,3,1);imshow(I2) %显示灰度图像title('原始图像'); %为图像添加标题subplot(1,3,2);imshow(I4) %加入混合躁声后显示图像title('加噪后的图像');s=fftshift(fft2(I4)); %将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40; %初始化d0for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 if d<=d0 %点(i,j)在通带内的情况h=1; %通带变换函数else %点(i,j)在阻带内的情况h=0; %阻带变换函数ends(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3); %创建图形图像对象imshow(s); %显示ILPF滤波后的图像title('ILPF滤波后的图像(d=40)');运行结果:1.2 二阶巴特沃斯低通滤波器(BLPF)I1=imread('eight.tif'); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);figure,subplot(1,3,1);imshow(I2) %显示灰度图像title('原始图像'); %为图像添加标题subplot(1,3,2);imshow(I4) %加入混合躁声后显示图像title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n=2; %对n赋初值n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40; %初始化d0for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=1/(1+(d/d0)^(2*n)); %BLPF滤波函数s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3); %创建图形图像对象imshow(s); %显示ILPF滤波后的图像title('BLPF滤波后的图像(d=40)');实验结果:1.3 指数型低通滤波器(ELPF)I1=imread('eight.tif'); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);figure,subplot(1,3,1);imshow(I2) %显示灰度图像title('原始图像'); %为图像添加标题subplot(1,3,2);imshow(I4) %加入混合躁声后显示图像title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=exp(log(1/sqrt(2))*(d/d0)^2);s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3); %创建图形图像对象imshow(s); %显示ILPF滤波后的图像title('ELPF滤波后的图像(d=40)');运行结果:1.4 梯形低通滤波器(TLPF)I1=imread('eight.tif'); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);figure,subplot(1,3,1);imshow(I2) %显示灰度图像title('原始图像'); %为图像添加标题subplot(1,3,2);imshow(I4) %加入混合躁声后显示图像title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=10;d1=160;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 if (d<=d0)h=1;else if (d0<=d1)h=(d-d1)/(d0-d1);else h=0;endends(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3); %创建图形图像对象imshow(s); %显示ILPF滤波后的图像title('TLPF滤波后的图像'); %为图像添加标题运行结果:1.5 高斯低通滤波器(GLPF)I1=imread('eight.tif'); %读取图像I2=im2double(I1);I3=imnoise(I2,'gaussian',0.01);I4=imnoise(I3,'salt & pepper',0.01);figure,subplot(1,3,1);imshow(I2) %显示灰度图像title('原始图像'); %为图像添加标题subplot(1,3,2);imshow(I4) %加入混合躁声后显示图像title('加噪后的图像');s=fftshift(fft2(I4));%将灰度图像的二维不连续Fourier 变换的零频率成分移到频谱的中心[M,N]=size(s); %分别返回s的行数到M中,列数到N中n1=floor(M/2); %对M/2进行取整n2=floor(N/2); %对N/2进行取整d0=40;for i=1:Mfor j=1:Nd=sqrt((i-n1)^2+(j-n2)^2); %点(i,j)到傅立叶变换中心的距离 h=1*exp(-1/2*(d^2/d0^2)); %GLPF滤波函数s(i,j)=h*s(i,j); %ILPF滤波后的频域表示endends=ifftshift(s); %对s进行反FFT移动s=im2uint8(real(ifft2(s))); %对s进行二维反离散的Fourier变换后,取复数的实部转化为无符号8位整数subplot(1,3,3); %创建图形图像对象imshow(s); %显示ILPF滤波后的图像title('GLPF滤波后的图像(d=40)');运行结果:1.6 维纳滤波器[B,Cmap]=imread('eight.tif'); %读取MATLAB中的名为eight的图像I1=im2double(B);I2=imnoise(I1,'gaussian',0.01);I3=imnoise(I2,'salt & pepper',0.01);figure,subplot(1,3,1);imshow(I1) %显示灰度图像title('原始图像'); %为图像添加标题subplot(1,3,2);imshow(I3) %加入混合躁声后显示图像title('加噪后的图像');I4=wiener2(I3);subplot(1,3,3);imshow(I4); %显示wiener滤波后的图像title('wiener滤波后的图像');运行结果:结论:理想低通滤波器,虽然有陡峭的截止频率,却不能产生良好的效果,图像由于高频分量的滤除而变得模糊,同时还产生振铃效应。
Canny算子提取边缘Matlab源代码

Canny算子提取边缘Matlab源代码介绍function e=canny_edge(I,sigma)%functione=edge(I,'canny',thresh,sigma);%该函数实现Canny算子提取边缘点%输入图像为I,标准差sigma,输出为边缘图像e[m,n]=size(I);Rr=2:m-1;cc=2:n-1;e=repmat(logical(uint8(0)),m,n);%产生同样大小的边缘图像e,初始化为1 ,即初始化边缘GaussianDieOff=-0.001;%设定高斯函数消失门限PercentOfPixelsNotEdges=-7;%用于计算边缘门限ThresholdRatio=-4;%设置两个门限的比例%首先设计高斯滤波器和它的微分pw=1:30;%设定滤波器宽度ssq=sigma*sigma;%计算方差width=max(find(exp(-(pw.*pw)/(2*sigma*sigma))>GaussianDieOff)); %计算滤波算子宽度t=(-width:width);len=2*width+1;t3=[t-.5;t;t+.5];%对每个像素左右各半个像素位置的值进行平均gau=sum(exp(-(t3.*t3)/(2*ssq))).'/(6*pi*ssq);%一维高斯滤波器dgau=(-t.*exp(-(t.*t)/(2*ssq))/ssq).';%高斯滤波器的微分ra=size(I,1);ca=size(I,2);ay=255*double(I);ax=255*double(I');h=conv(gau,dgau);%利用高斯函数滤除噪声和用高斯算子的一阶微分对图像滤波合并为一个算子ax=conv2(ax,h,'same').';%产生x方向滤波ay=conv2(ay,h,'same');%产生y方向滤波mag=sqrt((ax.*ax)+(ay.*ay));%计算滤波结果的幅度magmax=max(mag(:));if magmax>0mag=mag/magmax;%对滤波幅度进行归一化end%下面根据滤波幅度的概率密度计算滤波门限[counts,x]=imhist(mag,64);%计算滤波结果的幅度的直方图highThresh=min(find(cumsum(counts)>PercentOfPixelsNotEdges*m*n))/64; %通过设定非边缘点的比例来确定高门限lowThresh=ThresholdRatio*highThresh;%设置低门限为高门限乘以比例因子thresh=[lowThresh,highThresh];%下面进行非极大抑制%大于高门限的点归于强边缘图像%小于低门限的点归于弱边缘图像idxStrong=[];for dir=1:4idxLocalMax=cannyFindLocalMaxima(dir,ax,ay,mag); idxWeak=idxLocalMax(mag(idxLocalMax)>lowThresh);e(idxWeak)=1;idxStrong=[idxStrong;idxWeak(mag(idxWeak)>highThresh)]; endrstrong=rem(idxStrong-1,m)+1;%rem是求余数cstrong=floor((idxStrong-1)/m)+1;%向-∞取整e=bwselect(e,cstrong,rstrong,8);%通过形态学算子将两幅图像的边缘进行连接(资料素材和资料部分来自网络,供参考。
边缘提取和边缘检测matlab程序代码大全
附录Part1:对cameraman原始图像处理的仿真程序:clcclear allclose allA = imread('cameraman.bmp'); % 读入图像subplot(2,4,1);imshow(A);title('原图');x_mask = [1 0;0 -1]; % 建立X方向的模板y_mask = rot90(x_mask); % 建立Y方向的模板I = im2double(A); % 将图像数据转化为双精度dx = imfilter(I, x_mask); % 计算X方向的梯度分量dy = imfilter(I, y_mask); % 计算Y方向的梯度分量grad = sqrt(dx.*dx + dy.*dy); % 计算梯度grad = mat2gray(grad); % 将梯度矩阵转换为灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 用阈值分割梯度图像subplot(2,4,2);imshow(BW); % 显示分割后的图像即边缘图像title('Roberts');y_mask = [-1 -2 -1;0 0 0;1 2 1];x_mask = y_mask';I = im2double(A);dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy); % 计算梯度grad = mat2gray(grad);level = graythresh(grad);BW = im2bw(grad,level);subplot(2,4,3);imshow(BW); % 显示分割后的图像即边缘图像title('Sobel');y_mask = [-1 -1 -1;0 0 0;1 1 1];x_mask = y_mask';dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy); % 计算梯度grad = mat2gray(grad);level = graythresh(grad);BW = im2bw(grad,level); % 用阈值分割梯度图像subplot(2,4,4);imshow(BW); % 显示分割后的图像即边缘图像title('Prewitt');mask=[0,-1,0;-1,4,-1;0,-1,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58); % 用阈值分割梯度图像subplot(2,4,5);imshow(BW); % 显示分割后的图像,即梯度图像title('Laplacian');mask=[0,0,-1,0,0;0,-1,-2,-1,0;-1,-2,16,-2,-1;0,-1,-2,-1,0;0,0,-1,0,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58);subplot(2,4,6);imshow(BW); % 显示分割后的图像,即梯度图像title('log');BW1 = edge(I,'canny'); % 调用canny函数subplot(2,4,7);imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny');mask1=[-1 -2 -1;0 0 0;1 2 1]; % 建立方向模板mask2=[-2 -1 0;-1 0 1;0 1 2];mask3=[-1 0 1;-2 0 2;-1 0 1];mask4=[0 1 2;-1 0 1;-2 -1 0];mask5=[1 2 1;0 0 0;-1 -2 -1];mask6=[2 1 0;1 0 -1;0 -1 -2];mask7=[1 0 -1;2 0 -2;1 0 -1];mask8=[0 -1 -2;1 0 -1;2 1 0];d1 = imfilter(I, mask1); % 计算8个领域的灰度变化d2 = imfilter(I, mask2);d3 = imfilter(I, mask3);d4 = imfilter(I, mask4);d5 = imfilter(I, mask5);d6 = imfilter(I, mask6);d7 = imfilter(I, mask7);d8 = imfilter(I, mask8);dd = max(abs(d1),abs(d2)); % 取差值变化最大的元素组成灰度变化矩阵dd = max(dd,abs(d3));dd = max(dd,abs(d4));dd = max(dd,abs(d5));dd = max(dd,abs(d6));dd = max(dd,abs(d7));dd = max(dd,abs(d8));grad = mat2gray(dd); % 将灰度变化矩阵转化为灰度图像BB = grad;FW=median(BB(:))/0.6745;B = BB.*BB;B = sum(B(:));FX= sqrt(B/256^2);FS=sqrt(max(FX^2-FW^2,0));T=sqrt(2)*FW^2/FS; % 计算最佳阈值grad = mat2gray(BB);BW2=im2bw(grad,T); % 用最佳阈值分割梯度图像subplot(2,4,8);imshow(BW2); % 显示分割后的图像,即边缘图像title('sobel改进算子');Part2加入高斯噪声后的cameraman仿真程序:clcclear allclose allA = imread('cameraman.bmp'); % 读入图像V=0.009;X=imnoise(A,'gaussian',0,V);subplot(2,4,1);imshow(X);%添加均值为0、方差0.09的高斯噪声x_mask = [1 0;0 -1]; % 创建X方向的模板y_mask = rot90(x_mask); % 创建Y方向的模板I = im2double(X); % 图像数据双精度转化dx = imfilter(I, x_mask); % X方向的梯度分量的计算dy = imfilter(I, y_mask); % Y方向的梯度分量的计算grad = sqrt(dx.*dx + dy.*dy); % 梯度计算grad = mat2gray(grad); % 梯度矩阵转换成灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 使用阈值分割梯度图像subplot(2,4,2);imshow(BW); % 显示分割后的图像即边缘图像title('Roberts');y_mask = [-1 -2 -1;0 0 0;1 2 1];x_mask = y_mask';dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy);grad = mat2gray(grad); % 梯度矩阵转为灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 用阈值分割梯度图像subplot(2,4,3);imshow(BW); % 显示分割后的图像即边缘图像title('Sobel');y_mask = [-1 -1 -1;0 0 0;1 1 1];x_mask = y_mask';dx = imfilter(I, x_mask);dy = imfilter(I, y_mask);grad = sqrt(dx.*dx + dy.*dy);grad = mat2gray(grad);level = graythresh(grad);BW = im2bw(grad,level);subplot(2,4,4);imshow(BW); % 显示分割后的图像即边缘图像title('Prewitt');mask=[0,-1,0;-1,4,-1;0,-1,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58); % 用阈值分割梯度图像subplot(2,4,5);imshow(BW); % 显示分割后的图像,即梯度图像title('Laplacian');mask=[0,0,-1,0,0;0,-1,-2,-1,0;-1,-2,16,-2,-1;0,-1,-2,-1,0;0,0,-1,0,0]; % 建立模板dx = imfilter(I, mask); % 计算梯度矩阵grad = mat2gray(dx); % 将梯度矩阵转化为灰度图像BW = im2bw(grad,0.58); % 用阈值分割梯度图像subplot(2,4,6);imshow(BW); % 显示分割后的图像,即梯度图像title('log');BW1 = edge(I,'canny'); % 调用canny函数subplot(2,4,7);imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny');mask1=[-1 -2 -1;0 0 0;1 2 1]; % 建立方向模板mask2=[-2 -1 0;-1 0 1;0 1 2];mask3=[-1 0 1;-2 0 2;-1 0 1];mask4=[0 1 2;-1 0 1;-2 -1 0];mask5=[1 2 1;0 0 0;-1 -2 -1];mask6=[2 1 0;1 0 -1;0 -1 -2];mask7=[1 0 -1;2 0 -2;1 0 -1];mask8=[0 -1 -2;1 0 -1;2 1 0];d1 = imfilter(I, mask1); % 计算8个领域的灰度变化d2 = imfilter(I, mask2);d3 = imfilter(I, mask3);d4 = imfilter(I, mask4);d5 = imfilter(I, mask5);d6 = imfilter(I, mask6);d7 = imfilter(I, mask7);d8 = imfilter(I, mask8);dd = max(abs(d1),abs(d2)); % 取差值变化最大的元素组成灰度变化矩阵dd = max(dd,abs(d3));dd = max(dd,abs(d4));dd = max(dd,abs(d5));dd = max(dd,abs(d6));dd = max(dd,abs(d7));dd = max(dd,abs(d8));grad = mat2gray(dd); % 将灰度变化矩阵转化为灰度图像BB = grad;FW=median(BB(:))/0.6745;B = BB.*BB;B = sum(B(:));FX= sqrt(B/256^2);FS=sqrt(max(FX^2-FW^2,0));T=sqrt(2)*FW^2/FS; % 计算最佳阈值grad = mat2gray(BB); % 将梯度矩阵转化为灰度图像BW2=im2bw(grad,T); % 用最佳阈值分割梯度图像subplot(2,4,8);imshow(BW2); % 显示分割后的图像,即边缘图像title('sobel改进算子');加入椒盐噪声的边缘检测程序:function jingdianI=imread('lenna.bmp');I1=imnoise(I,'salt & pepper');%添加椒盐噪声,默认值为0.02 figure,imshow(I1);%添加均值为0、方差0.002的高斯噪声title('添加椒盐噪声后原图')B1=edge(I1,'roberts');B2=edge(I1,'sobel');B3=edge(I1,'prewitt');B4=edge(I1,'canny');B5=edge(I1,'log');subplot(2,3,1);imshow(B1);title('roberts算子检测');subplot(2,3,2);imshow(B2);title('sobel算子检测');subplot(2,3,3);imshow(B3);title('prewitt算子检测');subplot(2,3,4);imshow(B4);title('canny算子检测');subplot(2,3,5)imshow(B5);title('log算子检测');B1=edge(I1,'roberts');%调用roberts算子检测图像B2=edge(I1,'sobel');%调用soble算子进行边缘检测B3=edge(I1,'prewitt');%调用prewitt算子进行边缘检测B4=edge(I1,'canny');%调用canny算子对图像进行边缘检测B5=edge(I1,'log');%调用log算子对图像进行边缘检测subplot(2,3,1);%设置图像布局imshow(B1);title('roberts算子检测');%现实图像并命名为roberts算子检测subplot(2,3,2);imshow(B2);title('sobel算子检测');subplot(2,3,3);imshow(B3);title('prewitt算子检测');subplot(2,3,4);imshow(B4);title('canny算子检测');subplot(2,3,5)imshow(B5);title('log算子检测');mask1=[-1 -2 -1;0 0 0;1 2 1]; % 建立方向模板mask2=[-2 -1 0;-1 0 1;0 1 2];mask3=[-1 0 1;-2 0 2;-1 0 1];mask4=[0 1 2;-1 0 1;-2 -1 0];mask5=[1 2 1;0 0 0;-1 -2 -1];mask6=[2 1 0;1 0 -1;0 -1 -2];mask7=[1 0 -1;2 0 -2;1 0 -1];mask8=[0 -1 -2;1 0 -1;2 1 0];I = im2double(I1); % 将数据图像转化为双精度d1 = imfilter(I, mask1); % 计算8个领域的灰度变化d2 = imfilter(I, mask2);d3 = imfilter(I, mask3);d4 = imfilter(I, mask4);d5 = imfilter(I, mask5);d6 = imfilter(I, mask6);d7 = imfilter(I, mask7);d8 = imfilter(I, mask8);dd = max(abs(d1),abs(d2)); % 取差值变化最大的元素组成灰度变化矩阵dd = max(dd,abs(d3));dd = max(dd,abs(d4));dd = max(dd,abs(d5));dd = max(dd,abs(d6));dd = max(dd,abs(d7));dd = max(dd,abs(d8));grad = mat2gray(dd); % 将灰度变化矩阵转化为灰度图像level = graythresh(grad); % 计算灰度阈值BW = im2bw(grad,level); % 用阈值分割梯度图像BB = grad;FW=median(BB(:))/0.6745;B = BB.*BB;B = sum(B(:));FX= sqrt(B/256^2);FS=sqrt(max(FX^2-FW^2,0));T=sqrt(2)*FW^2/FS; % 计算最佳阈值grad = mat2gray(BB); % 将梯度矩阵转化为灰度图像BW2=im2bw(grad,T); % 用最佳阈值分割梯度图像subplot(2,3,6);imshow(BW2); % 显示分割后的图像,即边缘图像title('加入椒盐噪声的sobel改进算子');。
matlabcanny算子边缘检测函数代码

分享到:2012-04-24 20:42网友采纳clcclear allclose allI = imread('cameraman.tif'); % 读入图像imshow(I);title('原图')BW1 = edge(I,'canny'); % 调用canny函数figure,imshow(BW1); % 显示分割后的图像,即梯度图像title('Canny')用Lena标准检测图像,图像与代码下面注明了是哪张图像。
一、没有噪声时的检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测二、加入高斯噪声(μ=0,σ^2=0.01)检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测三、加入高斯噪声(μ=0,σ^2=0.02)检测结果 1 原始图像2 Sobel算子边缘检测3 Prewitt算子边缘检测4 Roberts算子边缘检测5 Laplace算子边缘检测6 Canny算子边缘检测clear all; close all;warning off all;I = imread('lena.bmp'); %%如果是其他类型图像,请先转换为灰度图%%没有噪声时的检测结果BW_sobel = edge(I,'sobel');BW_prewitt = edge(I,'prewitt');BW_roberts = edge(I,'roberts');BW_laplace = edge(I,'log');BW_canny = edge(I,'canny'); figure(1);subplot(2,3,1),imshow(I),xlabel('原始图像');subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');%%加入高斯噪声(μ=0,σ^2=0.01)检测结果I_g1 = imnoise(I,'gaussian',0,0.01);BW_sobel = edge(I_g1,'sobel');BW_prewitt = edge(I_g1,'prewitt');BW_roberts = edge(I_g1,'roberts');BW_laplace = edge(I_g1,'log');BW_canny = edge(I_g1,'canny'); figure(2);subplot(2,3,1),imshow(I_g1),xlabel('加入高斯噪声(μ=0,σ^2=0.01)图像'); subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');%%加入高斯噪声(μ=0,σ^2=0.02)检测结果I_g2 = imnoise(I,'gaussian',0,0.02);BW_sobel = edge(I_g2,'sobel');BW_prewitt = edge(I_g2,'prewitt');BW_roberts = edge(I_g2,'roberts');BW_laplace = edge(I_g2,'log');BW_canny = edge(I_g2,'canny'); figure(3);subplot(2,3,1),imshow(I_g2),xlabel('加入高斯噪声(μ=0,σ^2=0.02)图像'); subplot(2,3,2),imshow(BW_sobel),xlabel('sobel检测');subplot(2,3,3),imshow(BW_prewitt),xlabel('prewitt检测');subplot(2,3,4),imshow(BW_roberts),xlabel('roberts检测');subplot(2,3,5),imshow(BW_laplace),xlabel('laplace检测');subplot(2,3,6),imshow(BW_canny),xlabel('canny检测');199条建筑设计知识1. 公共建筑通常以交通、使用、辅助三种空间组成2. 美国著名建筑师沙利文提出的名言‘形式由功能而来’3. 密斯.凡.德.罗设计的巴塞罗那博览会德国馆采用的是‘自由灵活的空间组合’开创了流动空间的新概念4. 美国纽约赖特设计的古根海姆美术馆的展厅空间布置采用形式是串联式5. 电影放映院不需采光6. 点式住宅可设天井或平面凹凸布置可增加外墙面,有利于每层户数较多时的采光和通风7. 对结构形式有规定性的有大小和容量、物理环境、形状的规定性8. 功能与流线分析是现代建筑设计最常用的手段9. 垂直方向高的建筑需要考虑透视变形的矫正10. 橙色是暖色,而紫色含有蓝色的成分,所以偏冷;青色比黄色冷、红色比黄色暖、蓝色比绿色冷11. 同样大小冷色调较暖色调给人的感觉要大12. 同样距离,暖色较冷色给人以靠近感13. 为保持室内空间稳定感,房间的低处宜采用低明度色彩14. 冷色调给人以幽雅宁静的气氛15. 色相、明度、彩度是色彩的三要素;三元色为红、黄、蓝16. 尺度的概念是建筑物整体或局部给人的视角印象大小和其实际大小的关系17. 美的比例,必然正确的体现材料的力学特征18. 不同文化形成独特的比例形式19. 西方古典建筑高度与开间的比例,愈高大愈狭长,愈低矮愈宽阔20. ‘稳定’所涉及的要素是上与下之间的相对轻重关系的处理21. 人眼观赏规律H 18°~45°局部、细部2H 18°~27°整体3H <18°整体及环境22. 黄金分隔比例为1:1.61823. 通风屋面只能隔离太阳辐射不能保温,适宜于南方24. 总图布置要因地制宜,建筑物与周围环境之间关系紧凑,节约因地;适当处理个体与群体,空间与体形,绿化和小品的关系;合理解决采光、通风、朝向、交通与人流的组织25. 热水系统舒适稳定适用于居住建筑和托幼蒸汽系统加热快,适用于间歇采暖建筑如会堂、剧场26. 渐变具有韵律感27. 要使一座建筑显得富有活力,形式生动,在构图中应采用对比的手法对比的手法有轴线对比、体量对比、方向对比、虚实对比、色彩对比28. 要使柱子看起来显得细一些,可以采用暗色和冷色29. 巴西国会大厅在体型组合中采用了对比与协调的手法30. 展览建筑应使用穿套式的空间组合形式31. 室外空间的构成,主要依赖于建筑和建筑群体组合32. 在意大利威尼斯的圣马可广场的布局中,采用了强调了各种空间之间的对比33. 当坡地坡度较缓时,应采用平行等高线布置34. 建筑的有效面积=建筑面积-结构面积35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽35. 加大开窗面积的方法来解决采光和通风问题较易办到36. 中国古代木结构大致可分为抬梁式、穿斗式和井干式三种37. 建筑构图原理的基本范畴有主从与重点、对比与呼应、均衡与稳定、节奏与韵律和比例与尺度38. 建筑构图的基本规律是多样统一39. 超过8层的建筑中,电梯就成为主要的交通工具了40. 建筑的模数分为基本模数、扩大模数和分模数41. 建筑楼梯梯段的最大坡度不宜超过38°42. 住宅起居室、卧室、厨房应直接采光,窗地比为1/7,其他为1/1243. 住宅套内楼梯梯段的最小净宽两边墙的0.9M,一边临空的0.75M住宅室内楼梯踏步宽不应小于0.22M,踏步高度不应小大0.20M44. 住宅底层严禁布置火灾危险性甲乙类物质的商店,不应布置产生噪声的娱乐场所45. 地下室、贮藏室等房间的最低净高不应低于2.0米46. 室内坡道水平投影长度超过15米时,宜设休息平台47. 外墙内保温所占面积不计入使用面积烟道、风道、管道井不计入使用面积阳台面积不计入使用面积壁柜应计入使用面积48. 旋转楼梯两级的平面角度不大于10度,且每级离内侧扶手中心0.25处的踏步宽度要大于0.22米49. 两个安全出口之间的净距不应小于5米50. 楼梯正面门扇开足时宜保持0.6米平台净宽,侧墙门口距踏步不宜小于0.4米,其门扇开足时不应减少梯段的净宽51. 入地下车库的坡道端部宜设挡水反坡和横向通长雨水篦子52. 室内台阶宜150*300;室外台阶宽宜350左右,高宽比不宜大于1:2.553. 住宅公用楼梯踏步宽不应小于0.26M,踏步高度不应大于0.175M54. 梯段宽度不应小于1.1M(6层及以下一边设栏杆的可为1.0M),净空高度2.2M55. 休息平台宽度应大于梯段宽度,且不应小于1.2M,净空高度2.0M56. 梯扶手高度0.9M,水平段栏杆长度大于0.5M时应为1.05M57. 楼梯垂直杆件净空不应大于0.11M,梯井净空宽大于0.11M时应采取防护措施58. 门洞共用外门宽1.2M,户门卧室起居室0.9M,厨房0.8M,卫生间及阳台门0.7M,所有门洞高为2.0M59. 住宅层高不宜高于2.8M60. 卧室起居室净高≥2.4M,其局部净高≥2.1M(且其不应大于使用面积的1/3)61. 利用坡顶作起居室卧室的,一半面积净高不应低于2.1M利用坡顶空间时,净高低于1.2M处不计使用面积;1.2--2.1M计一半使用面积;高于2.1M全计使用面积62. 放家具墙面长3M,无直接采光的厅面积不应大于10M263. 厨房面积Ⅰ、Ⅱ≥4M2;Ⅲ、Ⅳ≥5M264. 厨房净宽单面设备不应小于1.5M;双面布置设备间净距不应小于0.9M65. 对于大套住宅,其使用面积必须满足45平方米66. 住宅套型共分四类使用面积分别为34、45、56、68M267. 单人卧室≥6M2;双人卧室≥10M2;兼起居室卧室≥12M2;68. 卫生间面积三件3M2;二件2--2.5M2;一件1.1M269. 厨房、卫生间净高2.2M70. 住宅楼梯窗台距楼地面净高度低于0.9米时,不论窗开启与否,均应有防护措施71. 阳台栏杆净高1.05M;中高层为1.1M(但要<1.2);杆件净距0.1172. 无外窗的卫生间应设置防回流构造的排气通风道、预留排气机械的位置、门下设进风百叶窗或与地面间留出一定缝隙73. 每套应设阳台或平台、应设置晾衣设施、顶层应设雨罩;阳台、雨罩均应作有组织排水;阳台宜做防水;雨罩应做防水74. 寒冷、夏热冬冷和夏热冬暖地区的住宅,西面应采取遮阳措施75. 严寒地区的住宅出入口,各种朝向均应设防寒门斗或保温门76. 住宅建筑中不宜设置的附属公共用房有锅炉房、变压器室、易燃易爆化学物品商店但有厨房的饮食店可设77. 住宅设计应考虑防触电、防盗、防坠落78. 跃层指套内空间跨跃两楼层及以上的住宅79. 在坡地上建住宅,当建筑物与等高线垂直时,采用跌落方式较为经济80. 住宅建筑工程评估指标体系表中有一级和二级指标81. 7层及以上(16米)住宅必须设电梯82. 宿舍最高居住层的楼地面距入口层地面的高度大于20米时,应设电梯83. 医院病房楼,设有空调的多层旅馆,超过5层的公建室内疏散楼梯,均应设置封闭楼梯间(包括首层扩大封闭楼梯间)设歌舞厅放映厅且超过3层的地上建筑,应设封闭楼梯间。
如何在Matlab中进行图像分割
如何在Matlab中进行图像分割图像分割是图像处理中十分重要的一项技术,它能够将图像划分为多个具有独立意义的区域,有助于进一步的图像分析和处理。
在Matlab中进行图像分割,我们可以利用许多现成的函数和工具箱,使得整个过程更加高效和便捷。
本文将介绍如何在Matlab中进行图像分割,包括基于阈值的分割方法、基于边缘的分割方法以及基于区域的分割方法。
首先,基于阈值的分割方法是最简单和常用的图像分割方法之一。
它基于图像的亮度或颜色信息,将图像分为不同的区域。
在Matlab中,我们可以使用im2bw 函数将彩色图像转换为二值图像,然后使用graythresh函数或multithresh函数确定适当的阈值。
例如,下面的代码演示了如何使用阈值进行图像分割:```matlabimg = imread('image.jpg');grayImg = rgb2gray(img);threshold = graythresh(grayImg);binaryImg = im2bw(grayImg, threshold);```其次,基于边缘的分割方法是通过检测图像中的边缘信息来实现图像分割。
在Matlab中,我们可以使用一系列边缘检测算法,如Sobel算子、Canny算子等。
这些算法可以提取图像中的边缘信息,并将其转化为二值图像。
下面的代码演示了如何使用Canny算子进行图像分割:```matlabimg = imread('image.jpg');grayImg = rgb2gray(img);edgeImg = edge(grayImg, 'canny');```最后,基于区域的分割方法是将图像分为具有相似纹理、颜色或形状特征的区域。
在Matlab中,我们可以使用基于区域的分割算法,如分水岭算法、区域生长算法等。
这些算法可以通过对图像进行区域合并或区域分裂来实现图像分割。
matlab卷积提取边缘实例

当谈到图像处理和边缘检测时,Matlab中的卷积技术无疑是一个非常有用且强大的工具。
在本文中,我将探讨Matlab中卷积提取边缘的实例,以及如何利用这一技术来实现高质量的图像处理。
我将从简单的概念和原理开始,逐步深入,帮助您更好地理解这一主题。
1. 初识卷积在图像处理中,卷积是一种非常重要的数学运算。
通过卷积,可以在图像中提取出一些特定的信息,比如边缘、纹理等。
在Matlab中,我们可以使用conv2函数来进行二维卷积运算。
这个函数非常灵活,可以对图像进行各种滤波操作。
2. 边缘检测边缘是图像中的一个非常重要的特征,常常被用来进行目标检测和识别。
在Matlab中,我们可以利用卷积来提取图像中的边缘信息。
常见的边缘检测算子包括Sobel、Prewitt、Canny等。
这些算子利用卷积的原理,通过对图像进行滤波,可以有效地提取出图像中的边缘信息。
3. 实例演示接下来,我将通过一个实例来演示如何在Matlab中利用卷积来提取图像中的边缘。
我们需要加载一张待处理的图像,并将其转化为灰度图像。
我们可以利用conv2函数和Sobel算子来对图像进行卷积操作,从而提取出图像中的边缘。
4. 结果展示通过卷积提取边缘后,我们可以将处理前后的图像进行对比,以展示卷积技术在边缘提取中的有效性。
我们也可以通过调整卷积核的参数,来观察其对边缘检测结果的影响。
这样可以帮助我们更好地理解卷积在边缘检测中的作用。
5. 个人观点在我看来,Matlab中的卷积技术在图像处理领域中具有非常重要的意义。
通过卷积,我们可以有效地提取图像中的各种特征信息,包括边缘、纹理等。
而且,Matlab提供了非常丰富和灵活的函数库,使得我们可以很方便地进行各种卷积操作。
我认为掌握卷积技术对于图像处理领域的学习和应用是非常重要的。
总结回顾通过本文的介绍,我希望您能对Matlab中卷积提取边缘的实例有一个更全面、深刻和灵活的理解。
我们从卷积的概念开始,介绍了卷积在边缘检测中的重要性,并通过实例演示和结果展示,帮助您更直观地理解了卷积在图像处理中的应用。
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释
matlabcanny边缘检测代码接霍夫变换-概述说明以及解释1.引言1.1 概述边缘检测是图像处理中的一个重要任务,它广泛应用于计算机视觉、图像分析和模式识别等领域。
边缘检测的目标是找到图像中不同区域之间的边界,并将其表示为像素强度的变化。
Canny边缘检测算法是一种经典且常用的边缘检测方法。
它通过一系列的图像处理步骤来提取图像中的边缘信息。
Canny算法的特点是能够检测出细且准确的边缘,并且对于图像中的噪声具有较好的抵抗能力。
Matlab是一种功能强大的数学软件,广泛应用于科学计算、数据可视化和图像处理等领域。
Matlab提供了丰富的图像处理函数和工具箱,其中包括了Canny边缘检测的实现代码。
本文的主要目的是介绍Matlab中Canny边缘检测的代码实现,并结合Hough变换算法进行边缘检测的应用。
通过使用Matlab中的相关函数和工具,我们可以有效地实现Canny边缘检测,并结合Hough变换来进一步处理和分析图像中的边缘特征。
本文将首先回顾Canny边缘检测算法的原理和步骤,然后介绍Matlab中的Canny边缘检测代码的使用方法。
接着,我们将介绍Hough 变换算法的原理和应用,并展示如何将Canny边缘检测与Hough变换相结合来实现更精确的边缘检测。
最后,我们将对Canny边缘检测和Hough变换的优缺点进行讨论,总结这两种方法在边缘检测中的应用。
同时,我们也将展望未来的研究方向,探讨如何进一步改进和优化边缘检测算法,以满足不断发展的图像处理需求。
通过阅读本文,读者将能够理解Canny边缘检测算法和Hough变换算法的原理,掌握Matlab中相关代码的使用方法,并了解边缘检测在实际应用中的优势和局限性。
希望本文能为读者在图像处理领域的学习和研究提供一定的帮助和启示。
文章结构是指文章的整体框架和组织形式。
一个良好的文章结构可以使读者更好地理解和领会文章的内容,同时也有助于文章的逻辑性和条理性。
matlab实现自适应阈值的canny算法
一、背景介绍随着数字图像处理技术的不断发展,图像边缘检测一直是计算机视觉和图像处理领域的关键问题之一。
Canny算法作为一种经典的边缘检测算法,在实际应用中具有较高的准确性和鲁棒性,因此被广泛应用于各种图像处理任务中。
Canny算法的核心思想是利用图像的梯度信息来检测图像中的边缘,同时通过非极大值抑制和双阈值检测来提取最终的边缘信息。
二、Canny算法原理1. 高斯模糊:为了减少图像中的噪声对边缘检测的影响,Canny算法首先对图像进行高斯模糊处理,通过平滑图像来减少噪声的影响。
2. 梯度计算:接下来,Canny算法利用Sobel算子计算图像的梯度幅值和方向,得到图像的梯度信息。
3. 非极大值抑制:Canny算法通过比较图像中每个像素点的梯度方向,来抑制非边缘像素,从而得到更细化的边缘信息。
4. 双阈值检测:Canny算法利用双阈值检测来进一步筛选边缘像素,从而得到最终的边缘信息。
三、Matlab实现Canny算法1. 读取图像:使用Matlab的imread函数读取待处理的图像,并将其转换为灰度图像。
2. 高斯模糊:利用Matlab中的imgaussfilt函数对灰度图像进行高斯模糊处理,减少图像中的噪声。
3. 计算梯度:使用Matlab中的imgradient函数计算图像的梯度幅值和方向。
4. 非极大值抑制:编写代码实现对图像的非极大值抑制处理,保留图像中的边缘像素。
5. 双阈值检测:通过设定合适的高低阈值,使用Matlab中的imbinarize函数对图像进行双阈值检测,得到最终的边缘信息。
6. 显示结果:使用Matlab中的imshow函数将原始图像和处理后的边缘图像进行显示,观察算法的效果。
四、自适应阈值优化1. 传统Canny算法中,阈值的设定是一个固定的数值,对于不同图像可能会产生较大的误差。
2. 为了进一步提高Canny算法的准确性和鲁棒性,在阈值的设定上可以引入自适应阈值技术。
matlabcanny边缘检测代码接霍夫变换
matlabcanny边缘检测代码接霍夫变换全文共四篇示例,供读者参考第一篇示例:Matlab是一个强大的数学软件工具,其图像处理工具箱可以帮助我们进行各种图像处理操作,比如边缘检测和霍夫变换。
本文将分享如何使用Matlab进行Canny边缘检测,并结合霍夫变换进行线检测。
Canny边缘检测是一种经典的边缘检测算法,它的优点是能够检测到边缘的细节,并且对噪声具有一定的鲁棒性。
在Matlab中,我们可以通过一行简单的代码来实现Canny边缘检测:```edgeImage = edge(rgb2gray(image), 'canny');```以上代码中,我们首先将原始图像转换为灰度图像,然后调用Matlab的'edge'函数,并指定边缘检测算法为Canny,最后我们将得到的边缘图像存储在edgeImage中。
接下来,我们可以将边缘图像显示出来,以便进行进一步的处理和分析。
```imshow(edgeImage);通过上述代码,我们可以看到Canny边缘检测算法的效果,边缘比较清晰,同时也保留了边缘的细节信息。
接下来,我们将介绍如何使用霍夫变换来进行线检测。
霍夫变换是一种经典的图像处理算法,其主要应用是检测直线和圆等几何形状。
在Matlab中,我们可以通过一行代码来实现霍夫变换的线检测:```[H,theta,rho] = hough(edgeImage);peaks = houghpeaks(H, 10);lines = houghlines(edgeImage, theta, rho, peaks);imshow(image);hold on;for k = 1 : length(lines)xy = [lines(k).point1; lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');endhold off;以上代码中,我们首先调用Matlab的'hough'函数来计算霍夫变换的极坐标空间。
基于MATLAB的图像边缘提取并计算其角度和距离
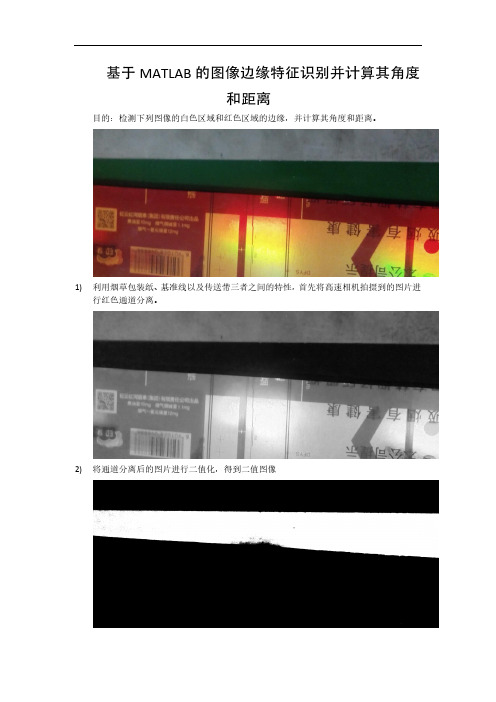
MATLAB目的:检测下列图像的白色区域和红色区域的边缘,并计算其角度和距离。
1)利用烟草包装纸、基准线以及传送带三者之间的特性,首先将高速相机拍摄到的图片进行红色通道分离。
2)将通道分离后的图片进行二值化,得到二值图像3)将所得到的二值图像进行边缘检测4)将边缘检测后的图像先腐蚀运算,再进行膨胀运算,得到最终图像5)将图8最终得到的两条边界线使用MATLAB进行最小二乘法拟合,分别得到两条边界线的关系式,并使用数学方法计算出两条边界线的角度以及图像最左端的直线距离。
此例中,计算得到的两边沿的偏离角大小为3.15°,两边沿最左端距离大小为303.51像素。
clear clcimage=imread('Image.jpg'); %读取图片imtool(image); %显示所读取的图片imager = image(:,:,1); %提取图片红色通道imtool(imager);BW = im2bw(imager,0.15); %二值化BW = ~BW;imtool(BW);BW1 = edge(BW,'canny',0.95); %检测边缘imtool(BW1);se1 = strel('line',9,176); %腐蚀IM1 = imerode(BW1,se1);imtool(IM1);se2 = strel('line',60,176); %膨胀IM2 = imdilate(IM1,se2);imtool(IM2);[a,b]=size(IM2);[h,w]=find(IM2==1); %筛选边界点,像素值为1yx=[h,w];yx_size = size(yx); %像素点坐标对数%数据筛选出上下边界线以供拟合p=1;q=1;for k=1:yx_size(1,1)if(yx(k,1)>=600)yx1(p,:) = yx(k,:);p = p+1;elseyx2(q,:) = yx(k,:);q = q+1;endendyx1_c1 = yx1(:,1);yx1_c2 = yx1(:,2);yx2_c1 = yx2(:,1);yx2_c2 = yx2(:,2);%绘制分离边界的像素点plot(w,h,'r.')axis([0 b 0 a]);hold on%绘制拟合的直线xy1=polyfit(yx1_c2,yx1_c1,1);plot(1:b,polyval(xy1,1:b),'b-')axis([0 b 0 a]);hold onxy2=polyfit(yx2_c2,yx2_c1,1);plot(1:b,polyval(xy2,1:b),'y-')axis([0 b 0 a]);hold on%计算两直线的夹角angle_xy = 180*atan( abs((xy2(1,1)-xy1(1,1)))/(1+xy1(1,1) *xy2(1,1)) )/pi %角度%计算最左端的距离,以像素点为单位dist_xy = polyval(xy1,0)-polyval(xy2,0)。
基于Matlab的图像边缘检测算法的实现及应用
目录摘要 (1)引言 (2)第一章绪论 (3)1.1 课程设计选题的背景及意义 (3)1.2 图像边缘检测的发展现状 (4)第二章边缘检测的基本原理 (5)2.1 基于一阶导数的边缘检测 (8)2.2 基于二阶导的边缘检测 (9)第三章边缘检测算子 (10)3.1 Canny算子 (10)3.2 Roberts梯度算子 (11)3.3 Prewitt算子 (12)3.4 Sobel算子 (13)3.5 Log算子 (14)第四章MATLAB简介 (15)4.1 基本功能 (15)4.2应用领域 (16)第五章编程和调试 (17)5.1 edge函数 (17)5.2 边缘检测的编程实现 (17)第六章总结与体会 (20)参考文献 (21)附录 (22)附录A:程序代码 (22)附录B:各种边缘检测算子得到的边缘图像效果 (23)摘要边缘是图像最基本的特征,包含图像中用于识别的有用信息,边缘检测是数字图像处理中基础而又重要的内容。
该课程设计具体考察了5种经典常用的边缘检测算子,并运用Matlab进行图像处理结果比较。
梯度算子简单有效,LOG算法和Canny边缘检测器能产生较细的边缘。
边缘检测的目的是标识数字图像中灰度变化明显的点,而导函数正好能反映图像灰度变化的显著程度,因而许多方法利用导数来检测边缘。
在分析其算法思想和流程的基础上,利用MATLAB对这5种算法进行了仿真实验,分析了各自的性能和算法特点,比较边缘检测效果并给出了各自的适用范围。
关键词:边缘检测;图像处理;MATLAB仿真如需程序/Word版本,请访问: 嵌入式软件院。
引言边缘检测在图像处理系统中占有重要的作用,其效果直接影响着后续图像处理效果的好坏。
许多数字图像处理直接或间接地依靠边缘检测算法的性能,并且在模式识别、机器人视觉、图像分割、特征提取、图像压缩等方面都把边缘检测作为最基本的工具。
但实际图像中的边缘往往是各种类型的边缘以及它们模糊化后结果的组合,并且在实际图像中存在着不同程度的噪声,各种类型的图像边缘检测算法不断涌现。
2019年整理基于MATLAB边缘检测与提取的几种方法的比较精品资料
基于MATLAB边缘检测与提取的几种方法的比较数字图像边缘检测(Digital Image Processing)又称为计算机图像边缘检测,它是指将图像信号转换成数字信号并利用计算机对其进行处理的过程。
由于图像边缘是图像最基本的特征之一,往往携带着一幅图像的大部分信息。
而边缘存在于图像的不规则结构和不平稳现象中,也即存在于信号的突变点处,这些点给出了图像轮廓的位置,这些轮廓常常是我们在图像边缘检测时所需要的非常重要的一些特征条件,这就需要我们对一幅图像检测并提取出它的边缘。
在通常情况下,我们可以将信号中的奇异点和突变点认为是图像中的边缘点,其附近灰度的变化情况可从它相邻像素灰度分布的梯度来反映。
根据这一特点,提出了多种边缘检测算子:如Robert算子、Sobel 算子、Prewitt 算子、Laplacian 算子,Canny算子等。
这些方法多是以待处理像素为中心的邻域作为进行灰度分析的基础,实现对图像边缘的提取并已经取得了较好的处理效果。
经典的边界提取技术大都基于微分运算。
首先通过平滑来滤除图像中的噪声,然后进行一阶微分或二阶微分运算,求得梯度最大值或二阶导数的过零点,最后选取适当的阈值来提取边界。
本文主要介绍几种经典的边缘提取算法,选取两种用MATLAB语言编程实现,对提取结果进行比较和分析。
图像边缘检测的基本步骤:(1)滤波。
边缘检测主要基于导数计算,但受噪声影响。
但滤波器在降低噪声的同时也导致边缘强度的损失。
(2)增强。
增强算法将邻域中灰度有显著变化的点突出显示。
一般通过计算梯度幅值完成。
(3)检测。
但在有些图像中梯度幅值较大的并不是边缘点。
最简单的边缘检测是梯度幅值阈值判定。
(4)定位。
精确确定边缘的位置。
几种边缘算子的比较以柚子的图片为例1、Roberts算子是一种利用局部差分算子寻找边缘的算子,Roberts算子边缘定位准,但是对噪声敏感。
适用于边缘明显而且噪声较少的图像分割,在应用中经常用Roberts算子来提取道路。
MATLAB实用源代码(图像处理)
MATLAB实用源代码图像读取及灰度变换I=imread('cameraman.tif');%读取图像subplot(1,2,1),imshow(I) %输出图像title('原始图像') %在原始图像中加标题subplot(1,2,2),imhist(I) %输出原图直方图title('原始图像直方图') %在原图直方图上加标题图像旋转I = imread('cameraman.tif');figure,imshow(I);theta = 30;K = imrotate(I,theta); % Try varying the angle, theta. figure, imshow(K)边缘检测I = imread('cameraman.tif');J1=edge(I,'sobel');J2=edge(I,'prewitt');J3=edge(I,'log');subplot(1,4,1),imshow(I);subplot(1,4,2),imshow(J1);subplot(1,4,3),imshow(J2);subplot(1,4,4),imshow(J3);1.图像反转MATLAB 程序实现如下:I=imread('xian.bmp');J=double(I);J=-J+(256-1); %图像反转线性变换H=uint8(J);subplot(1,2,1),imshow(I);subplot(1,2,2),imshow(H);2.灰度线性变换MATLAB 程序实现如下:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on; %显示坐标系I1=rgb2gray(I);subplot(2,2,2),imshow(I1);title('灰度图像');axis([50,250,50,200]);axis on; %显示坐标系J=imadjust(I1,[0.1 0.5],[]); %局部拉伸,把[0.1 0.5]内的灰度拉伸为[0 1] subplot(2,2,3),imshow(J);title('线性变换图像[0.1 0.5]');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系K=imadjust(I1,[0.3 0.7],[]); %局部拉伸,把[0.3 0.7]内的灰度拉伸为[0 1] subplot(2,2,4),imshow(K);title('线性变换图像[0.3 0.7]');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系3.非线性变换MATLAB 程序实现如下:I=imread('xian.bmp');I1=rgb2gray(I);subplot(1,2,1),imshow(I1);title(' 灰度图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系J=double(I1);J=40*(log(J+1));H=uint8(J);subplot(1,2,2),imshow(H);title(' 对数变换图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系4.直方图均衡化MATLAB 程序实现如下:I=imread('xian.bmp');I=rgb2gray(I);figure;subplot(2,2,1);imshow(I);subplot(2,2,2);imhist(I);I1=histeq(I);figure;subplot(2,2,1);imshow(I1);subplot(2,2,2);imhist(I1);5. 线性平滑滤波器用MA TLAB实现领域平均法抑制噪声程序:I=imread('xian.bmp');subplot(231)imshow(I)title('原始图像')I=rgb2gray(I);I1=imnoise(I,'salt & pepper',0.02);subplot(232)imshow(I1)title(' 添加椒盐噪声的图像')k1=filter2(fspecial('average',3),I1)/255; %进行3*3模板平滑滤波k2=filter2(fspecial('average',5),I1)/255; %进行5*5模板平滑滤波k3=filter2(fspecial('average',7),I1)/255; %进行7*7模板平滑滤波k4=filter2(fspecial('average',9),I1)/255; %进行9*9模板平滑滤波subplot(233),imshow(k1);title('3*3 模板平滑滤波');subplot(234),imshow(k2);title('5*5 模板平滑滤波');subplot(235),imshow(k3);title('7*7 模板平滑滤波');subplot(236),imshow(k4);title('9*9 模板平滑滤波');6.中值滤波器用MA TLAB实现中值滤波程序如下:I=imread('xian.bmp');I=rgb2gray(I);J=imnoise(I,'salt&pepper',0.02);subplot(231),imshow(I);title('原图像');subplot(232),imshow(J);title('添加椒盐噪声图像');k1=medfilt2(J); %进行3*3模板中值滤波k2=medfilt2(J,[5,5]); %进行5*5模板中值滤波k3=medfilt2(J,[7,7]); %进行7*7模板中值滤波k4=medfilt2(J,[9,9]); %进行9*9模板中值滤波subplot(233),imshow(k1);title('3*3模板中值滤波');subplot(234),imshow(k2);title('5*5模板中值滤波');subplot(235),imshow(k3);title('7*7模板中值滤波');subplot(236),imshow(k4);title('9*9 模板中值滤波');7.用Sobel算子和拉普拉斯对图像锐化:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I1=im2bw(I);subplot(2,2,2),imshow(I1);title('二值图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系H=fspecial('sobel'); %选择sobel算子J=filter2(H,I1); %卷积运算subplot(2,2,3),imshow(J);title('sobel算子锐化图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系h=[0 1 0,1 -4 1,0 1 0]; %拉普拉斯算子J1=conv2(I1,h,'same'); %卷积运算subplot(2,2,4),imshow(J1);title('拉普拉斯算子锐化图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系8.梯度算子检测边缘用MA TLAB实现如下:I=imread('xian.bmp');subplot(2,3,1);imshow(I);title('原始图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I1=im2bw(I);subplot(2,3,2);imshow(I1);title('二值图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I2=edge(I1,'roberts');figure;subplot(2,3,3);imshow(I2);title('roberts算子分割结果');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I3=edge(I1,'sobel');subplot(2,3,4);imshow(I3);title('sobel算子分割结果');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I4=edge(I1,'Prewitt');subplot(2,3,5);imshow(I4);title('Prewitt算子分割结果');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系9.LOG算子检测边缘用MA TLAB程序实现如下:I=imread('xian.bmp');subplot(2,2,1);imshow(I);title('原始图像');I1=rgb2gray(I);subplot(2,2,2);imshow(I1);title('灰度图像');I2=edge(I1,'log');subplot(2,2,3);imshow(I2);title('log算子分割结果');10.Canny算子检测边缘用MA TLAB程序实现如下:I=imread('xian.bmp');subplot(2,2,1);imshow(I);title('原始图像')I1=rgb2gray(I);subplot(2,2,2);imshow(I1);title('灰度图像');I2=edge(I1,'canny');subplot(2,2,3);imshow(I2);title('canny算子分割结果');11.边界跟踪(bwtraceboundary函数)clcclear allI=imread('xian.bmp');figureimshow(I);title('原始图像');I1=rgb2gray(I); %将彩色图像转化灰度图像threshold=graythresh(I1); %计算将灰度图像转化为二值图像所需的门限BW=im2bw(I1, threshold); %将灰度图像转化为二值图像figureimshow(BW);title('二值图像');dim=size(BW);col=round(dim(2)/2)-90; %计算起始点列坐标row=find(BW(:,col),1); %计算起始点行坐标connectivity=8;num_points=180;contour=bwtraceboundary(BW,[row,col],'N',connectivity,num_points);%提取边界figureimshow(I1);hold on;plot(contour(:,2),contour(:,1), 'g','LineWidth' ,2);title('边界跟踪图像');12.Hough变换I= imread('xian.bmp');rotI=rgb2gray(I);subplot(2,2,1);imshow(rotI);title('灰度图像');axis([50,250,50,200]);grid on;axis on;BW=edge(rotI,'prewitt');subplot(2,2,2);imshow(BW);title('prewitt算子边缘检测后图像');axis([50,250,50,200]);grid on;axis on;[H,T,R]=hough(BW);subplot(2,2,3);imshow(H,[],'XData',T,'YData',R,'InitialMagnification','fit');title('霍夫变换图');xlabel('\theta'),ylabel('\rho');axis on , axis normal, hold on;P=houghpeaks(H,5,'threshold',ceil(0.3*max(H(:))));x=T(P(:,2));y=R(P(:,1));plot(x,y,'s','color','white');lines=houghlines(BW,T,R,P,'FillGap',5,'MinLength',7);subplot(2,2,4);,imshow(rotI);title('霍夫变换图像检测');axis([50,250,50,200]);grid on;axis on;hold on;max_len=0;for k=1:length(lines)xy=[lines(k).point1;lines(k).point2];plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','green');plot(xy(1,1),xy(1,2),'x','LineWidth',2,'Color','yellow');plot(xy(2,1),xy(2,2),'x','LineWidth',2,'Color','red');len=norm(lines(k).point1-lines(k).point2);if(len>max_len)max_len=len;xy_long=xy;endendplot(xy_long(:,1),xy_long(:,2),'LineWidth',2,'Color','cyan');13.直方图阈值法用MA TLAB实现直方图阈值法:I=imread('xian.bmp');I1=rgb2gray(I);figure;subplot(2,2,1);imshow(I1);title(' 灰度图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系[m,n]=size(I1); %测量图像尺寸参数GP=zeros(1,256); %预创建存放灰度出现概率的向量for k=0:255GP(k+1)=length(find(I1==k))/(m*n); %计算每级灰度出现的概率,将其存入GP中相应位置endsubplot(2,2,2),bar(0:255,GP,'g') %绘制直方图title('灰度直方图')xlabel('灰度值')ylabel(' 出现概率')I2=im2bw(I,150/255);subplot(2,2,3),imshow(I2);title('阈值150的分割图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I3=im2bw(I,200/255); %subplot(2,2,4),imshow(I3);title('阈值200的分割图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系14. 自动阈值法:Otsu法用MA TLAB实现Otsu算法:clcclear allI=imread('xian.bmp');subplot(1,2,1),imshow(I);title('原始图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系level=graythresh(I); %确定灰度阈值BW=im2bw(I,level);subplot(1,2,2),imshow(BW);title('Otsu 法阈值分割图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系15.膨胀操作I=imread('xian.bmp'); %载入图像I1=rgb2gray(I);subplot(1,2,1);imshow(I1);title('灰度图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系se=strel('disk',1); %生成圆形结构元素I2=imdilate(I1,se); %用生成的结构元素对图像进行膨胀subplot(1,2,2);imshow(I2);title(' 膨胀后图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系16.腐蚀操作MATLAB 实现腐蚀操作I=imread('xian.bmp'); %载入图像I1=rgb2gray(I);subplot(1,2,1);imshow(I1);title('灰度图像')axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系se=strel('disk',1); %生成圆形结构元素I2=imerode(I1,se); %用生成的结构元素对图像进行腐蚀subplot(1,2,2);imshow(I2);title('腐蚀后图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系17.开启和闭合操作用MA TLAB实现开启和闭合操作I=imread('xian.bmp'); %载入图像subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on; %显示坐标系I1=rgb2gray(I);subplot(2,2,2),imshow(I1);title('灰度图像');axis([50,250,50,200]);axis on; %显示坐标系se=strel('disk',1); %采用半径为1的圆作为结构元素I2=imopen(I1,se); %开启操作I3=imclose(I1,se); %闭合操作subplot(2,2,3),imshow(I2);title('开启运算后图像');axis([50,250,50,200]);axis on; %显示坐标系subplot(2,2,4),imshow(I3);title('闭合运算后图像');axis([50,250,50,200]);axis on; %显示坐标系18.开启和闭合组合操作I=imread('xian.bmp'); %载入图像subplot(3,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on; %显示坐标系I1=rgb2gray(I);subplot(3,2,2),imshow(I1);title('灰度图像');axis([50,250,50,200]);axis on; %显示坐标系se=strel('disk',1);I2=imopen(I1,se); %开启操作I3=imclose(I1,se); %闭合操作subplot(3,2,3),imshow(I2);title('开启运算后图像');axis([50,250,50,200]);axis on; %显示坐标系subplot(3,2,4),imshow(I3);title('闭合运算后图像');axis([50,250,50,200]);axis on; %显示坐标系se=strel('disk',1);I4=imopen(I1,se);I5=imclose(I4,se);subplot(3,2,5),imshow(I5); %开—闭运算图像title('开—闭运算图像');axis([50,250,50,200]);axis on; %显示坐标系I6=imclose(I1,se);I7=imopen(I6,se);subplot(3,2,6),imshow(I7); %闭—开运算图像title('闭—开运算图像');axis([50,250,50,200]);axis on; %显示坐标系19.形态学边界提取利用MATLAB实现如下:I=imread('xian.bmp'); %载入图像subplot(1,3,1),imshow(I);title('原始图像');axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I1=im2bw(I);subplot(1,3,2),imshow(I1);title('二值化图像');权威认证axis([50,250,50,200]);grid on; %显示网格线axis on; %显示坐标系I2=bwperim(I1); %获取区域的周长subplot(1,3,3),imshow(I2);title('边界周长的二值图像');axis([50,250,50,200]);grid on;axis on;20.形态学骨架提取利用MATLAB实现如下:I=imread('xian.bmp');subplot(2,2,1),imshow(I);title('原始图像');axis([50,250,50,200]);axis on;I1=im2bw(I);subplot(2,2,2),imshow(I1);title('二值图像');axis([50,250,50,200]);axis on;I2=bwmorph(I1,'skel',1);subplot(2,2,3),imshow(I2);title('1次骨架提取');axis([50,250,50,200]);axis on;I3=bwmorph(I1,'skel',2);subplot(2,2,4),imshow(I3);title('2次骨架提取');axis([50,250,50,200]);axis on;21.直接提取四个顶点坐标I = imread('xian.bmp');I = I(:,:,1);BW=im2bw(I);figureimshow(~BW)[x,y]=getpts。
robert算子边缘检测matlab代码

robert算子边缘检测matlab代码罗伯特(Roberts)算子是一种边缘检测算子,用于检测图像中的边缘。
以下是一个简单的MATLAB代码示例,用于应用罗伯特算子进行边缘检测:```matlab%读取图像originalImage=imread('lena.jpg');%请替换成你的图像文件路径%将图像转换为灰度图grayImage=rgb2gray(originalImage);%罗伯特算子边缘检测robertsX=[10;0-1];robertsY=[01;-10];%使用卷积进行边缘检测edgeX=conv2(double(grayImage),robertsX,'same');edgeY=conv2(double(grayImage),robertsY,'same');%计算边缘强度edgeMagnitude=sqrt(edgeX.^2+edgeY.^2);%显示结果figure;subplot(2,2,1),imshow(originalImage),title('原始图像');subplot(2,2,2),imshow(grayImage),title('灰度图');subplot(2,2,3),imshow(edgeMagnitude,[]),title('罗伯特算子边缘检测结果');subplot(2,2,4),imshowpair(edgeX,edgeY,'montage'),title('X方向和Y方向边缘');%设置图像标题suptitle('罗伯特算子边缘检测');```请确保将`'lena.jpg'`替换为你实际使用的图像文件路径。
这个代码使用了罗伯特算子的卷积核进行水平(X方向)和垂直(Y方向)方向的边缘检测,然后计算了边缘强度,并显示了原始图像、灰度图和边缘检测结果。
matlab delaunay算法提取离散点边界的方法

matlab delaunay算法提取离散点边界的方法MATLAB Delaunay算法提取离散点边界的方法在现代科学和工程领域,我们经常会遇到需要处理离散点数据的情况。
地理信息系统、医学图像处理、地震学和遥感技术等领域都需要对离散点数据进行分析和处理。
而其中一个常见的问题就是如何从离散点数据中提取边界。
在MATLAB中,我们可以使用Delaunay算法来解决这个问题。
下面,我将深入探讨MATLAB中使用Delaunay算法提取离散点边界的方法并共享我的个人观点和理解。
1. Delaunay算法简介Delaunay三角剖分是一种将离散点集合转换为三角形网格的方法,它具有许多重要的性质,其中之一就是能够有效地提取离散点的边界。
在MATLAB中,我们可以使用`delaunay`函数来进行Delaunay三角剖分,该函数返回离散点的连接信息,也就是三角形的顶点索引。
接下来,我们可以根据这些连接信息来提取边界。
2. 提取离散点边界的方法在MATLAB中,我们可以通过以下步骤来提取离散点数据的边界:2.1 构建Delaunay三角形我们使用`delaunay`函数对离散点数据进行三角剖分,得到三角形的连接信息。
2.2 寻找边界三角形接下来,我们需要寻找属于边界的三角形。
一种简单的方法是遍历所有三角形,对每个三角形的边界进行检查,如果有边是不被其他三角形共享的,则将该三角形标记为边界三角形。
2.3 提取边界我们可以根据边界三角形的连接信息,提取离散点数据的边界。
这可以通过简单地将边界三角形的顶点连接起来来实现。
3. 我对提取离散点边界的方法的理解从我个人的角度来看,MATLAB中使用Delaunay算法提取离散点边界的方法具有一定的优势。
Delaunay三角剖分可以很好地保持三角形的形状,因此提取的边界也比较准确。
MATLAB提供了丰富的函数和工具,使得实现这一方法变得相对简单。
不过,需要注意的是,这种方法可能对于特定形状和分布的离散点数据并不适用,因此在实际应用中需要谨慎选择。
指纹识别的matlab预处理
指纹识别的matlab预处理
在Matlab中进行指纹识别的预处理通常包括以下步骤:
1. 噪声去除,使用滤波器(如中值滤波器或高斯滤波器)去除
指纹图像中的噪声,以提高后续处理的准确性。
2. 增强对比度,通过直方图均衡化或对比度拉伸等方法增强指
纹图像的对比度,以使细节更加清晰。
3. 边缘检测,使用边缘检测算法(如Sobel、Prewitt或
Canny算子)来检测指纹图像中的边缘信息,以便后续的特征提取。
4. 细化处理,对指纹图像进行细化处理,以减少细节信息并突
出指纹的主要特征。
5. 形态学处理,利用形态学操作(如腐蚀和膨胀)来消除图像
中的噪点,并连接断裂的特征。
6. 区域分割,将指纹图像分割成不同的区域,以便进一步的特
征提取和匹配。
在Matlab中,可以使用Image Processing Toolbox中提供的函数和工具来实现上述预处理步骤。
例如,可以使用medfilt2函数进行中值滤波、使用imadjust函数进行对比度增强、使用edge函数进行边缘检测、使用bwmorph函数进行形态学处理等。
总的来说,指纹识别的Matlab预处理涉及到图像处理和特征提取等方面的知识,需要综合运用Matlab中的图像处理工具和算法来完成。
希望以上回答能够对你有所帮助。
canny算子代码

canny算子代码canny算子代码void CreatGauss(double sigma, double **pdKernel, int *pnWidowSize);void GaussianSmooth(SIZE sz, LPBYTE pGray, LPBYTE pResult, double sigma);void Grad(SIZE sz, LPBYTE pGray, int *pGradX, int *pGradY, int *pMag);void NonmaxSuppress(int *pMag, int *pGradX, int *pGradY, SIZE sz, LPBYTE pNSRst);void EstimateThreshold(int *pMag, SIZE sz, int *pThrHigh, int *pThrLow, LPBYTE pGray, double dRatHigh, double dRatLow);void Hysteresis(int *pMag, SIZE sz, double dRatLow, double dRatHigh, LPBYTE pResult); void TraceEdge(int y, int x, int nThrLow, LPBYTE pResult, int *pMag, SIZE sz);void Canny(LPBYTE pGray, SIZE sz, double sigma, double dRatLow,double dRatHigh, LPBYTE pResult);#include "afx.h"#include "math.h"#include "canny.h"// 一维高斯分布函数,用于平滑函数中生成的高斯滤波系数void CreateGauss(double sigma, double **pdKernel, int *pnWidowSize){LONG i;//数组中心点int nCenter;//数组中一点到中心点距离double dDis;//中间变量double dValue;double dSum;dSum = 0;// [-3*sigma,3*sigma] 以内数据,会覆盖绝大部分滤波系数*pnWidowSize = 1+ 2*ceil(3*sigma);nCenter = (*pnWidowSize)/2;*pdKernel = new double[*pnWidowSize];//生成高斯数据for(i=0;i <(*pnWidowSize);i++){dDis = double(i - nCenter);dValue = exp(-(1/2)*dDis*dDis/(sigma*sigma))/(sqrt(2*3.1415926)*sigma); (*pdKernel)[i] = dValue;dSum+=dValue;}//归一化for(i=0;i <(*pnWidowSize);i++){(*pdKernel)[i]/=dSum;}}//用高斯滤波器平滑原图像void GaussianSmooth(SIZE sz, LPBYTE pGray, LPBYTE pResult, double sigma) {LONG x, y;LONG i;//高斯滤波器长度int nWindowSize;//窗口长度int nLen;//一维高斯滤波器double *pdKernel;//高斯系数与图像数据的点乘double dDotMul;//滤波系数总和double dWeightSum;double *pdTemp;pdTemp = new double[sz.cx*sz.cy];//产生一维高斯数据CreatGauss(sigma, &pdKernel, &nWindowSize);nLen = nWindowSize/2;//x方向滤波for(y=0;y <sz.cy;y++)< p="">{for(x=0;x <sz.cx;x++)< p="">{dDotMul = 0;dWeightSum = 0;for(i=(-nLen);i <=nLen;i++){//判断是否在图像内部if((i+x)>=0 && (i+x) <sz.cx)< p="">{dDotMul+=(double)pGray[y*sz.cx+(i+x)] * pdKernel[nLen+i]; dWeightSum += pdKernel[nLen+i];}}pdTemp[y*sz.cx+x] = dDotMul/dWeightSum;}}//y方向滤波for(x=0; x <sz.cx;x++)< p="">{for(y=0; y <="">{dDotMul = 0;dWeightSum = 0;for(i=(-nLen);i <=nLen;i++){if((i+y)>=0 && (i+y) < sz.cy){dDotMul += (double)pdTemp[(y+i)*sz.cx+x]*pdKernel[nLen+i];dWeightSum += pdKernel[nLen+i];}}pResult[y*sz.cx+x] = (unsigned char)dDotMul/dWeightSum;}}delete []pdKernel;pdKernel = NULL;delete []pdT emp;pdTemp = NULL;}// 方向导数,求梯度void Grad(SIZE sz, LPBYTE pGray, int *pGradX, int *pGradY, int *pMag) {LONG y,x;//x方向的方向导数for(y=1;y <sz.cy-1;y++)< p="">{for(x=1;x <sz.cx-1;x++)< p="">{pGradX[y*sz.cx +x] = (int)( pGray[y*sz.cx+x+1]-pGray[y*sz.cx+ x-1] ); }}//y方向方向导数for(x=1;x <sz.cx-1;x++)< p="">{for(y=1;y <sz.cy-1;y++)< p="">{pGradY[y*sz.cx +x] = (int)(pGray[(y+1)*sz.cx +x] - pGray[(y-1)*sz.cx +x]); }}//求梯度//中间变量double dSqt1;double dSqt2;for(y=0; y <="">{for(x=0; x <="">{//二阶范数求梯度dSqt1 = pGradX[y*sz.cx + x]*pGradX[y*sz.cx + x];dSqt2 = pGradY[y*sz.cx + x]*pGradY[y*sz.cx + x];pMag[y*sz.cx+x] = (int)(sqrt(dSqt1+dSqt2)+0.5);}}}//非最大抑制void NonmaxSuppress(int *pMag, int *pGradX, int *pGradY, SIZE sz, LPBYTE pNSRst) {LONG y,x;int nPos;//梯度分量int gx;int gy;//中间变量int g1,g2,g3,g4;double weight;double dTmp,dTmp1,dTmp2;//设置图像边缘为不可能的分界点for(x=0;x <sz.cx;x++)< p="">{pNSRst[x] = 0;pNSRst[(sz.cy-1)*sz.cx+x] = 0;}for(y=0;y <sz.cy;y++)< p="">{pNSRst[y*sz.cx] = 0;pNSRst[y*sz.cx + sz.cx-1] = 0;}for(y=1;y <sz.cy-1;y++)< p="">{for(x=1;x <sz.cx-1;x++)< p="">{//当前点nPos = y*sz.cx + x;//如果当前像素梯度幅度为0,则不是边界点if(pMag[nPos] == 0){pNSRst[nPos] = 0;}else{//当前点的梯度幅度dTmp = pMag[nPos];//x,y方向导数gx = pGradX[nPos];gy = pGradY[nPos];//如果方向导数y分量比x分量大,说明导数方向趋向于y分量if(abs(gy) > abs(gx)){//计算插值比例weight = fabs(gx)/fabs(gy);g2 = pMag[nPos-sz.cx];g4 = pMag[nPos+sz.cx];//如果x,y两个方向导数的符号相同//C 为当前像素,与g1-g4 的位置关系为://g1 g2// C// g4 g3if(gx*gy>0){g1 = pMag[nPos-sz.cx-1];g3 = pMag[nPos+sz.cx+1];}//如果x,y两个方向的方向导数方向相反//C是当前像素,与g1-g4的关系为:// g2 g1// C// g3 g4else{g1 = pMag[nPos-sz.cx+1];g3 = pMag[nPos+sz.cx-1];}}//如果方向导数x分量比y分量大,说明导数的方向趋向于x分量else{//插值比例weight = fabs(gy)/fabs(gx);g2 = pMag[nPos+1];g4 = pMag[nPos-1];//如果x,y两个方向的方向导数符号相同//当前像素C与g1-g4的关系为// g3// g4 C g2// g1if(gx * gy > 0){g1 = pMag[nPos+sz.cx+1];g3 = pMag[nPos-sz.cx-1];}//如果x,y两个方向导数的方向相反// C与g1-g4的关系为// g1// g4 C g2// g3else{g1 = pMag[nPos-sz.cx+1];g3 = pMag[nPos+sz.cx-1];}}//利用g1-g4 对梯度进行插值{dTmp1 = weight*g1 + (1-weight)*g2; dTmp2 = weight*g3 + (1-weight)*g4;//当前像素的梯度是局部的最大值//该点可能是边界点if(dTmp>=dTmp1 && dTmp>=dTmp2) {pNSRst[nPos] = 128;}else{//不可能是边界点pNSRst[nPos] = 0;}}}}}}// 统计pMag的直方图,判定阈值void EstimateThreshold(int *pMag, SIZE sz, int *pThrHigh, int*pThrLow, LPBYTE pGray, double dRatHigh, double dRatLow) {LONG y,x,k;//该数组的大小和梯度值的范围有关,如果采用本程序的算法//那么梯度的范围不会超过pow(2,10)int nHist[256];//可能边界数int nEdgeNum;//最大梯度数int nMaxMag;int nHighCount;nMaxMag = 0;//初始化for(k=0;k <256;k++){nHist[k] = 0;}//统计直方图,利用直方图计算阈值for(y=0;y <sz.cy;y++)< p="">{for(x=0;x <sz.cx;x++)< p="">{if(pGray[y*sz.cx+x]==128){nHist[pMag[y*sz.cx+x]]++;}}}nEdgeNum = nHist[0];nMaxMag = 0;//统计经过“非最大值抑制”后有多少像素for(k=1;k <256;k++){if(nHist[k] != 0){nMaxMag = k;}//梯度为0的点是不可能为边界点的//经过non-maximum suppression后有多少像素nEdgeNum += nHist[k];}//梯度比高阈值*pThrHigh 小的像素点总数目nHighCount = (int)(dRatHigh * nEdgeNum + 0.5);k=1;nEdgeNum = nHist[1];//计算高阈值while((k <(nMaxMag-1)) && (nEdgeNum < nHighCount)){k++;nEdgeNum += nHist[k];}*pThrHigh = k;//低阈值*pThrLow = (int)((*pThrHigh) * dRatLow + 0.5);}//利用函数寻找边界起点void Hysteresis(int *pMag, SIZE sz, double dRatLow, double dRatHigh, LPBYTE pResult) {LONG y,x;int nThrHigh,nThrLow;int nPos;//估计TraceEdge 函数需要的低阈值,以及Hysteresis函数使用的高阈值EstimateThreshold(pMag, sz,&nThrHigh,&nThrLow,pResult,dRatHigh,dRatLow);//寻找大于dThrHigh的点,这些点用来当作边界点,//然后用TraceEdge函数跟踪该点对应的边界for(y=0;y <sz.cy;y++)< p="">{for(x=0;x <sz.cx;x++)< p="">{nPos = y*sz.cx + x;//如果该像素是可能的边界点,并且梯度大于高阈值,//该像素作为一个边界的起点if((pResult[nPos]==128) && (pMag[nPos] >= nThrHigh)){//设置该点为边界点pResult[nPos] = 255;TraceEdge(y,x,nThrLow,pResult,pMag,sz);}}}//其他点已经不可能为边界点for(y=0;y <sz.cy;y++)< p="">{for(x=0;x <sz.cx;x++)< p="">{nPos = y*sz.cx + x;if(pResult[nPos] != 255){pResult[nPos] = 0;}}}//根据Hysteresis 执行的结果,从一个像素点开始搜索,搜索以该像素点为边界起点的一条边界的//一条边界的所有边界点,函数采用了递归算法// 从(x,y)坐标出发,进行边界点的跟踪,跟踪只考虑pResult中没有处理并且可能是边界// 点的像素(=128),像素值为0表明该点不可能是边界点,像素值为255表明该点已经是边界点void TraceEdge(int y, int x, int nThrLow, LPBYTE pResult, int *pMag, SIZE sz){//对8邻域像素进行查询int xNum[8] = {1,1,0,-1,-1,-1,0,1};int yNum[8] = {0,1,1,1,0,-1,-1,-1};LONG yy,xx,k;for(k=0;k <8;k++){yy = y+yNum[k];xx = x+xNum[k];if(pResult[yy*sz.cx+xx]==128 && pMag[yy*sz.cx+xx]>=nThrLow ){//该点设为边界点pResult[yy*sz.cx+xx] = 255;//以该点为中心再进行跟踪TraceEdge(yy,xx,nThrLow,pResult,pMag,sz);}}// Canny算子void Canny(LPBYTE pGray, SIZE sz, double sigma, double dRatLow,double dRatHigh, LPBYTE pResult){//经过高斯滤波后的图像LPBYTE pGaussSmooth;pGaussSmooth = new unsigned char[sz.cx*sz.cy];//x方向导数的指针int *pGradX;pGradX = new int[sz.cx*sz.cy];//y方向int *pGradY;pGradY = new int[sz.cx*sz.cy];//梯度的幅度int *pGradMag;pGradMag = new int[sz.cx*sz.cy];//对原图高斯滤波GaussianSmooth(sz,pGray,pGaussSmooth,sigma);//计算方向导数和梯度的幅度Grad(sz,pGaussSmooth,pGradX,pGradY,pGradMag);//应用非最大抑制NonmaxSuppress(pGradMag,pGradX,pGradY,sz,pResult);//应用Hysteresis,找到所有边界Hysteresis(pGradMag,sz,dRatLow,dRatHigh,pResult);delete[] pGradX;pGradX = NULL;delete[] pGradY;pGradY = NULL;delete[] pGradMag;pGradMag = NULL;delete[] pGaussSmooth;pGaussSmooth = NULL;}/*void CChildWnd::OnCanny(){if (! m_fOpenFile){return;}m_fDone = TRUE;RGBT oGray(szImg, aRGB, aGray, BPP);Canny(aGray,szImg,0.1,0.9,0.76,aBinImg); ShowGrayImage("l",szImg,aBinImg);} //*/</sz.cx;x++)<></sz.cy;y++)<></sz.cx;x++)<></sz.cy;y++)<></sz.cx;x++)<></sz.cy;y++)<></sz.cx-1;x++)<></sz.cy-1;y++)<></sz.cy;y++)<></sz.cx;x++)<></sz.cy-1;y++)<></sz.cx-1;x++)<></sz.cx-1;x++)<> </sz.cy-1;y++)<> </sz.cx;x++)<> </sz.cx)<></sz.cx;x++)<> </sz.cy;y++)<>。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Canny算子提取边缘Matlab源代码介绍function e=canny_edge(I,sigma)
%functione=edge(I,'canny',thresh,sigma);
%该函数实现Canny算子提取边缘点
%输入图像为I,标准差sigma,输出为边缘图像e
[m,n]=size(I);
Rr=2:m-1;cc=2:n-1;
e=repmat(logical(uint8(0)),m,n);
%产生同样大小的边缘图像e,初始化为1 ,即初始化边缘GaussianDieOff=-0.001;%设定高斯函数消失门限PercentOfPixelsNotEdges=-7;%用于计算边缘门限
ThresholdRatio=-4;%设置两个门限的比例
%首先设计高斯滤波器和它的微分
pw=1:30;
%设定滤波器宽度
ssq=sigma*sigma;
%计算方差
width=max(find(exp(-(pw.*pw)/(2*sigma*sigma))>GaussianDieOff)); %计算滤波算子宽度
t=(-width:width);
len=2*width+1;
t3=[t-.5;t;t+.5];
%对每个像素左右各半个像素位置的值进行平均
gau=sum(exp(-(t3.*t3)/(2*ssq))).'/(6*pi*ssq);
%一维高斯滤波器
dgau=(-t.*exp(-(t.*t)/(2*ssq))/ssq).';
%高斯滤波器的微分
ra=size(I,1);
ca=size(I,2);
ay=255*double(I);ax=255*double(I');
h=conv(gau,dgau);
%利用高斯函数滤除噪声和用高斯算子的一阶微分对图像滤波合并为一个算子ax=conv2(ax,h,'same').';
%产生x方向滤波
ay=conv2(ay,h,'same');
%产生y方向滤波
mag=sqrt((ax.*ax)+(ay.*ay));
%计算滤波结果的幅度
magmax=max(mag(:));
if magmax>0
mag=mag/magmax;
%对滤波幅度进行归一化
end
%下面根据滤波幅度的概率密度计算滤波门限
[counts,x]=imhist(mag,64);
%计算滤波结果的幅度的直方图
highThresh=min(find(cumsum(counts)>PercentOfPixelsNotEdges*m*n))/64; %通过设定非边缘点的比例来确定高门限
lowThresh=ThresholdRatio*highThresh;
%设置低门限为高门限乘以比例因子
thresh=[lowThresh,highThresh];
%下面进行非极大抑制
%大于高门限的点归于强边缘图像
%小于低门限的点归于弱边缘图像
idxStrong=[];
for dir=1:4
idxLocalMax=cannyFindLocalMaxima(dir,ax,ay,mag);
idxWeak=idxLocalMax(mag(idxLocalMax)>lowThresh);
e(idxWeak)=1;
idxStrong=[idxStrong;idxWeak(mag(idxWeak)>highThresh)];
end
rstrong=rem(idxStrong-1,m)+1;%rem是求余数
cstrong=floor((idxStrong-1)/m)+1;%向-∞取整
e=bwselect(e,cstrong,rstrong,8);
%通过形态学算子将两幅图像的边缘进行连接。