液压挖掘机反铲装置工作过程仿真研究
【精编完整版】液压挖掘机工装轨迹控制及仿真技术研究毕业论文

(此文档为word格式,下载后您可任意编辑修改!)综合课程设计II项目总结报告题目:液压挖掘机工装轨迹控制及仿真技术研究院(系)机电工程学院专业机械设计制造及其自动化学生学号班号指导教师填报日期2013年12月5日哈尔滨工业大学机电工程学院制2013年11月说明一、总结报告应包括下列主要内容:1.项目背景分析;2.研究计划要点与执行情况;3.项目关键技术的解决;4.具体研究内容与技术实现;5.技术指标分析;6.存在的问题与建议。
二、总结报告由指导教师填写意见、签字后,统一交所在院(系)保存,以备检查。
指导教师评语:指导教师签字:检查日期:哈尔滨工业大学课程设计任务书目录第一章挖掘机工装轨迹控制的机电液系统介绍 (1)1.1单斗液压挖掘机的机械模型简介 (1)1.2电液控制系统的组成 (2)第二章液压挖掘机工装轨迹的运动学分析 (4)2.1运动学问题 (4)2.2 运动学逆问题 (6)第三章液压挖掘机液压系统的建模分析 (9)3.1斗杆液压缸的传递函数 (9)3.2动臂液压缸的传递函数 (10)3.3其它环节传递函数 (10)3.4斗杆系统的整体建模与仿真 (12)3.5 动臂系统的整体建模与仿真 (14)第四章控制系统的电路设计 (17)4.1角度传感器的选择 (17)4.2 数据采集电路 (18)4.3 DA转换器及接口电路 (18)4.4 控制系统的电路原理图设计 (19)第五章控制方法的选择及MATLAB仿真技术 (21)5.1 计算机实现PID控制 (21)5.2 斗杆系统PID控制仿真 (22)5.3 动臂系统PID控制仿真 (25)参考文献 (29)第一章挖掘机工装轨迹控制的机电液系统介绍1.1单斗液压挖掘机的机械模型简介本次课程设计的液压挖掘机是针对学校的实验室用的样机模型,其容量为0.01立方米,动臂和斗杆为四连杆机构,动臂、斗杆和铲斗均由液压缸驱动,它们之间以销轴连接。
在动臂和斗杆的销轴上分别安装了角度传感器,用以检测相对位角。
WY100液压履带挖掘机总体及工作装置设计及运动仿真
ABSTRACT
Construction machinery hydraulic excavator is oneof the most important productswhichhashigh technical content.Working mechanism is the main equipment of hydraulic excavator,each jointpoint and the design of the concrete structureareimportant factorsto decide the working mechanism of the performance level, determiningthe working performance of hydraulic excavator, which influence the use performance is good or bad, so theresearchof hydraulic excavator is very necessary. The main characteristics of hydraulic excavator isas follow:It hasastepless speed regulation and wide speed range,itcan obtain stable low speed,whenactionquickly, the hydraulic parts produceasmallinertiaandgood acceleration performance, anditcan be used for high speed reversal,producesmooth transmission, simple structure, can absorb the impact and vibration, labor-saving operation,it iseasytocontrolautomaticallyandrealize the standardization, seriationandgeneralization.
毕业设计方案ADAMS的液压挖掘机工作装置的模拟仿真分析全套

1 绪论1.1液压挖掘机发展现状1.1.1挖掘机的发展简况挖掘机械的最早雏形,远在十六世纪于意大利威尼斯用于运河的疏浚工作。
随着工业发展,科学技术的进步,单斗挖掘机也由于新技术、新工艺的采用而不断地发展改进,但它的基本工作原理至今未变。
动力装置以及控制方式的不断革新,基本上反映了挖掘机发展的以下几个阶段:1.蒸汽机驱动的挖掘机,从发明到广泛应用,大约经历了100年。
当时主要用于开挖运河和修建铁路。
结构型式由轨道行走的半回转式,发展到履带行走的全回转式。
2.挖掘机传动型式的液压化,是挖掘机由机械传动型式的传统结构发展到现代结构的一次跃进。
随着液压传动技术的迅速发展,四十年代至五十年代初挖掘机开始应用于液压传动,并且由半液压发展到全液压传动。
产量日益增长,六十年代初期液压挖掘机产量占挖掘机总产量的15%,发展到七十年代初期占总产量90%左右,近年来,西欧市场出售的挖掘机几乎己全部采用液压传动。
与此同时,斗轮挖掘机、轮斗挖沟机等工作装置和臂架升降等部分也采用了液压传动。
大型矿用挖掘机在基本传动型式不变的情况下,其工作装置也改为液压驱动。
3.控制方式的不断革新,使挖掘机由简单的杠杆操纵发展到液压操纵、气压操纵、液压伺服操作和电气控制,无线电遥控。
最近又出现了电子计算机综合程序控制,控制人员可在远离施工现场的集中控制室内通过工业电视监视数台挖掘机工作。
1.1.2液压挖掘机的发展趋势液压挖掘机在工业与民用建筑、道路建设、水力、矿山、市政工程等土石施工中均占有重要位置。
并反映了这些部门的施工机械化水平。
是交通运输、能源开发、城镇建设以及国防施工等各项工程建设的重要施工设备,是国民经济建设迫切需要的装备。
重视和加速挖掘机改进创新,稳定提高产品质量,满足用户需求,对加速现代化工程建设有着重大的意义。
一.液压挖掘机国外发展现状液压挖掘机的生产水平反映机械化施工的水平和能力。
国外,特别是西欧几个国家从50年代开始研制液压挖掘机,到60年代中小型液压挖掘机已成批生产。
基于ADAMS的液压挖掘机工作装置仿真研究

s i z e a n d m o t i o n t r a j e c t o r y o f t h e e x c a v a t o r w e r e o b t a i n e d , mo r e o v e r , he t d i s p l a c e m e n t c u  ̄e s o f t h e e x c a v a t o r b u c k e t a n d b e a r i n g f o r c e
t e d i n t o t h e AD AMS t o b u i l d v i r t u l a p r o t o t y p e mo d e l o f t h e e x c a v a t o r .By u s i n g ADAMS s i mu l a t i o n f u n c t i o n,t h e s e q u e n t i a l o p e r a t i n g
mo d e a n d t h e c o mp o u n d a c t i o n o f t h e e x c a v a t o r w e r e s i mu l a t e d k i n e ma t i c ll a y a n d d y n a mi c a l l y .T h r o u g h s i mu l a t i o n, t h e ma i n o p e r a t i o n s
2 0 1 3年 1 1 月
机床 与液压
M ACHI NE T 0OL & HYDRAUL I CS
No v
Vo 1 . 41 No . 21
DO I :1 0 . 3 9 6 9 / j . i s s n . 1 0 0 1—3 8 8 1 . 2 0 1 3 . 2 1 . 0 3 6
液压挖掘机工作装置的建模与仿真分析
。
纵观我国液压挖掘机 30 余年的发展历史,大致可以分成以下几个阶段: (1)开发阶段(1967 年—1977 年)。以测绘仿制为主的开发,通过多年坚持不懈的努力,克服一个一 个的困难, 有少量几种规格的液压挖掘机终于获得初步成功, 为我国挖掘机行业的形成和发展迈出了重 要的一步。 (2)液压挖掘机发展、提高并全面替代机械挖掘机阶段(1978~1986 年)。这个阶段通过各主机生产厂 引进技术(主要是德国挖掘机制造技术)的消化、吸收和移植,使我国液压挖掘机产品的性能指标全面提 高到国际 70 年代末 80 年代初期的水平。全国液压挖掘机平均年产量达到 1230 台。 (3)液压挖掘机生产企业数量增加,新加入挖掘机行业的国有大、中型企业以技贸结合,合作生产 方式联合引进日本挖掘机制造技术(1987 年~1993 年)。由于国内对挖掘机需求量的不断提高,新加入 挖掘机行业的企业通过开发和引进挖掘机制造技术, 其产品批量或小批量的投放国内市场或出口, 打破 了多年来主要由六大家挖掘机生产企业垄断国内挖掘机市场的局面, 引进了有益于提高产品质量、 性能 和产量的良性竞争。这个期间国内液压挖掘机的年均产量提高到 2000 余台。 (4)国内液压挖掘机供需矛盾日益扩大,广大用户为了提高施工质量和按期完成施工任务,对使用 高质量、高水平、高效率挖掘机的兴趣日趋浓厚。国外各著名挖掘机制造厂商纷纷前来中国创办合资、 独资挖掘机生产企业。从 1994 年开始,特别到 1995 年在我国挖掘机行业掀起了一股不小的合资浪潮. 其中美国卡特彼勒公司率先在徐州金山桥开发区建立了生产液压挖掘机的合资企业, 随后日本小松制作 所、日立建机株式会社、神户制钢所、韩国大宇重工业、现代重工业以及德国利勃海尔公司等都相继在 中国建立了合资、独资挖掘机生产企业,生产具有世界先进水平的多种型号和规格的液压挖掘机[7]。
液压挖掘机工作装置在ADAMS中的运动仿真解析

液压挖掘机工作装置在A D A M S中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。
文章基于动力学仿真软件ADAMS 建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。
液压缸顺序工作的运动仿真分析1.1.基于尺寸确定当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。
简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。
在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。
在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。
例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。
1.2.顺序工作运动仿真实现的路线仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。
可以在液压缸移动副约束处添加移动驱动,改变运动方式,将其更换成位移运动方式。
运动的函数输入时,需要注意相匹配的的STEP函数。
对液压缸进行STEP函数值设置时,应该满足运动函数需求。
当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。
1.3.仿真过程当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。
可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。
这个伸缩过程需要得到弧线支撑,基于保障弧线运动轨迹基础上做好控制工作。
液压挖掘机工装轨迹的PID仿真技术

的仿真。当 !" ! "#$、 !# ! $%$"、 ! & ! # 时,动 臂回路的单位阶跃响应曲线如图 ’ 所示,开环波 德图如图 ( 所示,其模稳定裕度 $% 为 ’"%"&), 相稳定裕度 &% 为 *+%*&,-。由此可见,系统具 有较大的稳定裕度。
图# 图! 斗杆回路加入 !"# 控制器后的 单位阶跃响应曲线
设计研究 :;+ 综合篇
液压挖掘机工装轨迹的 !"# 仿真技术
吕广明! ,陆念力! ,古秀川" ,孙风岐!
(! # 哈尔滨工业大学 机电工程学院,黑龙江 哈尔滨 !$%%%!;" # 湛江师范学院,广东 湛江 $"&%&’)
[摘
要]本文在液压挖掘机机、电、液控制系统的数学建模,工装轨迹运动学分析的基础上,利用数字 ()* 技术,实现了挖掘机工装轨迹的自动控制,并利用 +,-.,/ 实现了计算机仿真技术研究。通 过仿真结果,进行了动臂、斗杆理想曲线和实际输出曲线的比较,证明了 ()* 控制技术的可行 性。
[!] ["] [0] 引入自动控制系统是势在必行的 。本文将
时间。 9:; !"# 算法的位置算式和增量算式 数字 ()* 是连续系统 ()* 控制规律的数字实 现。为了用程序实现 ()* 控制规律,将微分方程 式(!)离散化可得差分方程 ( () ! 6 #$( % () 7 #’ " ( % )) 7 #[ % () 9 8 (
[关键词]液压挖掘机;工装轨迹;数字 ()*;计算机仿真 [中图分类号] -(01!21;-34"! [文献标识码] / [文章编号]!%%!5!044 ("%%$) %&5%%"15%0
液压挖掘机工作装置在ADAMS中的运动仿真解析

液压挖掘机工作装置在ADAMS中的运动仿真解析姓名:XXX部门:XXX日期:XXX液压挖掘机工作装置在ADAMS中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。
文章基于动力学仿真软件ADAMS建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。
液压缸顺序工作的运动仿真分析1.1.基于尺寸确定当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。
简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。
在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。
在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。
例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。
1.2.顺序工作运动仿真实现的路线仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。
可以在液压缸移动副约束处添加移动驱动,改变运动方式,第 2 页共 5 页将其更换成位移运动方式。
运动的函数输入时,需要注意相匹配的的STEP函数。
对液压缸进行STEP函数值设置时,应该满足运动函数需求。
当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。
1.3.仿真过程当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。
可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。
液压挖掘机反铲装置虚拟样机仿真研究

Z H OU Ho n g q u a n ,LI U J i a n x i o n g,ZHAO Ya n b o
f i e d c o n d i t i o n s we r e o b t a i n e d b y t h e ADAM S d y n a mi c s i mu l a t i o n,t h e ma x i mu m l o a d o f e a c h a r t i c u l a t e d p o i n t o f t h e b a c k h o e
( F a c u l t y o f Me c h a n i c a l a n d El e c t r i c a l En g i n e e r i n g,Ku n mi n g Un i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y, Ku n mi n g 6 5 0 5 0 0 , C h i n a ) Ab s t r a c t :To s o l v e t h e p r o b l e ms t h a t t h e wo r k i n g s c o p e a n d d i g g i n g f o r c e o f h y d r a u l i c e x c a v a t o r b a c k h o e d e v i c e d u r i n g
Re s e a r c h o n Vi r t u a l Pr o t o t y pe S i m ul at i o n o f Ba c k ho e De v i c e of Hy dr a u l i c Ex c a v at o r
液压挖掘机工作装置虚拟样机仿真研究
液压挖掘机工作装置虚拟样机仿真研究摘要:随着我国建设项目以及工程技术的快速发展,液压挖掘设备已经被广泛应用在各类型的民用建设以及国家水利电力工程的施工项目中,借以提升工程建设的质量与效率。
经研究分析,虚拟样机仿真及设计项目的运作,可以提早发现液压挖掘机在实际工作中所可能遇到的问题,进而采取有效措施将其避免,这样便可以在一定程度上降低机械设备的研发成本。
本文就液压挖掘机工作装置虚拟样机仿真的相关内容进行深入研究,以期能为实践项目的运作带来启示。
关键词:液压挖掘机;工作装置;虚拟样机;仿真研究前言:液压挖掘机工作装置虚拟样机仿真模型的构建需要借助虚拟样机技术等内容来为其做支撑,通过计算以及数据分析得到关键的铰点处的受力曲线,进而为进一步优化设计液压挖掘机工作装置的性能带来帮助。
一、液压挖掘机工作装置虚拟样机仿真模型设计(一)液压挖掘机工作装置虚拟样机仿真模型设计的背景分析对于液压挖掘机工作装置的实践性能而言,良好的动力性是维系整个驱动系统高效运作的重要前提。
实质上,“斗杆”、“铲斗”等液压挖掘机工作装置本身的性能就是机械设备的源动力。
因此,需要借助有效的技术手段以及仿真模拟操作来探知液压挖掘机斗杆的最大挖掘力,以此来改进液压挖掘机工作装置的设计框架,进而提升液压挖掘设备的总体性能,增强液压挖掘设备支撑之下的产业经济效益。
(二)液压挖掘机工作装置虚拟样机3D 模型的构建在实际工作中,小型液压挖掘机设备的使用频率较高,因此,在研究的过程中,运用虚拟样机技术相关的软件(通常采用的是Pro/E 软件)来构建小型的液压挖掘机工作装置虚拟样机“3D 模型[1]”(如图1 所示)。
在建立模型的过程中,借助软件的功能,突出液压挖掘机的各部分组件,使其在模拟操作时,便于技术人员采集数据与记录状态。
在构建完毕后,针对液压挖掘设备的斗杆油缸最大挖掘力进行数据测算。
图1 液压挖掘机工作装置虚拟样机3D 模型示意图二、探究液压挖掘机工作装置虚拟样机仿真的基本原理及相关技术内容(一)进行液压挖掘机工作装置虚拟样机仿真实验的基础原理针对液压挖掘机工作装置虚拟样机仿真实验操作的本质是对该装置进行动力学仿真研究,并通过分析相关数据,得到对液压挖掘机工作装置结构设计的优化方案。
液压挖掘机反铲装置工作过程仿真研究报告
动臂。
虽然使结构和操作复杂化,但在挖掘机作业中可随时大幅度调整上、下动臂之间的夹角,从而提高挖掘机的作业性能,尤其掘窄而深的基坑时,容易得到较大距离的垂直挖掘轨迹,提高挖掘质量和生产率。
组合式动臂的优点是,可以根据作业条件随意调整和挖掘力,且调整时间短。
此外,它的互换工作装置多,可满足各种作业的需要,装车运输方便。
其缺点是质量大、制造成本高,一机上。
的是组合式动臂。
挖掘机反铲装置的分析作性能参数量0.8m3。
掘深度4.39m。
掘高度4.64m。
掘半径5.52m。
载高度2.66m。
掘力(最大>52kN。
置运动学分析示,反铲装置的几何位置取决于动臂油缸的长度L1,斗杆油缸的长度L2和铲斗油缸的长度L3。
当L1、L2和L3为一组定值时,便Yv>的一组值与其对应。
反之,对于Xv和Yv的一组定值却有许多组L1、L2、L3值与其对应。
图1 动臂机构计算简图构。
∠UCF是动臂油缸L1的函数。
动臂上任意一点在任一时刻的位置坐标也都是L1的函数。
构。
置参数是动臂油缸L1和斗杆油缸L2的函数。
这里暂先讨论斗杆相对于动臂的运动,即只考虑L2的影响。
斗杆机构与动臂机构性质连杆机构,但连杆比不同。
其连杆机构。
动是动臂油缸L1、斗杆油缸L2和铲斗油缸L3的函数,情况较复杂。
这里暂讨论铲斗相对于斗杆的运动。
置动力学分析力的分析。
工作时,即可用铲斗油缸挖掘(简称转斗挖掘>,也可用斗杆油缸挖掘(简称斗杆挖掘>,或做复合动作挖掘。
掘阻力的计算。
时,土壤切削力随挖掘深度改变而有明显变化,经实验转斗挖掘时的切削阻力与切削深度基本上成正比。
但总地来说,前半过程切削,因前半过程的切削角不利,产生了较大的切削阻力。
切削阻力的切向分力与土壤硬度、转斗切削半径、挖掘过程中铲斗总转角、铲、切削角、斗侧壁厚度和切削刃挤压土壤的力有关。
转斗挖掘的平均阻力可按平均挖掘深度下的阻力计算,也把半月形切削断面看作面,条形断面的长度可看作成斗齿转过的圆弧长度与其相应之弦的平均值。
浅析液压挖掘机工作装置设计的计算机仿真设计

1 液压 挖掘 机工 作装置
液 压挖掘机是根据 仿生学原理 , 从模仿人 体构 造 出发 , 设计 出包含 动臂、 斗杆 、 铲斗和连杆机构在 内的工作装置来实现挖掘功 能, 并通过液 压驱动 实现机体 3 6 0度连续回转、 下车机构连续行走等各项功能。 挖 掘机的发展历史悠久,最初 由美国人在 1 8 3 7年 利用蒸汽动 力原 理设计出了机 械动力驱动挖掘机;在 1 8 9 5年 出现 了可以实现 全回转的 机械动力挖掘机 ; 1 9 2 4年 , 柴油发动机进入 了挖掘机发动机领域 , 逐渐 淘 汰 了汽 油发动机 , 一直到现在; 1 9 4 8年以后 , 各挖掘机制造厂家相继制 造 完成了现 代的新 型液压挖掘机 , 并且逐步 改善达 到今 日的水平 。 如前所述 , 挖 掘机主要利用工作装 置来实现其挖掘 功能, 挖掘机 按 照工作装置主要分为两类 : ① 反铲装置, 主要适用于从地 表 向下挖掘, 更
【 文章编号 】 1 0 0 4 — 7 3 4 4 ( 2 0 1 3 ) 0 5 — 0 2 7 4 — 0 2
浅析液压挖掘机工作装置设计的计算机仿真设计
黄 方龙
【 日立建机 ( 中国) 有 限公司 安徽 合肥 2 3 0 0 0 0 ] 摘 要: 本 文主要在对挖掘机 的工作装置设计进行 分析的基础上 , 提 出了基 于计算机仿 真的设计方 法 , 根据液 压挖掘机工 作装置 的作业 过程 和使用特性进行计 算机仿真设计 的探讨 。
关键词 : 挖 掘机; 工作装置 ; 计算 机仿真
随着社会基础建设需求 的不断增加 ,城市化建设进程 的不断推进 , 挖 掘机在各种施工场合 , 如高速公路 、 地铁 、 城市排水管道建设等工程建 设中被广泛应用 , 使用液压挖掘机作业可 以在减轻体力劳动强度 的同时 快速提高施工效率 , 在提高劳动生产率 、 加快经济发展方 面起 着重要 的 作用 。液压挖掘机 由于其品种多、 作业范 围广 、 作业效率高等特 点, 已经 是一种被广泛应用的建设旌工机械 ,已经基本上全面替代人工作业 、 成 为各种 工程建设 的主力军。
液压挖掘机工作装置运动仿真研究

回转角度 / (° )
360
液压系统最大流量/(L/min)
490
图2 挖掘机ADAMS虚拟样机模型图
采用 MSC 公司开发的无缝连接方式的接口模块, 将 CR EO3.0 软件中建立的挖掘机工作装置装配模型 导入动力学仿真软件 A DA MS 中 [4]。由于不研究行走 机构,因此必须将平台作为一个构件导入 A DA MS 中。 在 CR EO3.0 软件中建模时,要注意单位和密度的设定 与 A DA MS 保持一致,否则在导入时会出现错误。在 模型中添加约束条件,如旋转副、移动副、圆柱副等, 建立起挖掘机工作装置虚拟样机模型。如图 2 所示。
W1, 法向 挖 掘 力 W2), 另一种 是 挖 掘 物 料而 带 来 的 重 力 W3。 挖 掘 机 工作时不但可以使用斗杆挖 掘也可 以使 用铲斗 挖 掘, 通常 情况下, 铲斗 挖 掘时 的 挖 掘 阻 力要稍 大于斗杆 挖 掘 所产生的阻 力。 因而本文 主 要 对 铲斗 挖 掘阻 力 进 行 仿真分 析, 切屑阻 力与 切屑深
优化设计来提供参考依据。
图1 反铲液压挖掘机三维装配模型图
1 虚拟样机的建立
反铲 液 压 挖 掘 机 工作装 置 主 要 是由铲斗、 铲斗 液
压 缸、 斗杆、 斗杆液 压 缸、 动臂、 动臂 液 压 缸、 回转 机构等构件组成 [3]。根据实验室已有的 SY235 型反铲 液压挖掘机,其主要的技术参数如表 1 所示。
且挖 掘力是 挖 掘机 主要的性能参 数, 其大小 与各 铰 点的位 置 和液 压 缸的 推 力有关 [5]。 挖 掘 机 在 挖 掘的 过 程中所受的外载 荷 通常分成两 种 :一种 是 挖 掘过
h
图3 挖掘力分析图
程中 挖 掘 土壤 而 产生的阻 力( 其中包 括 切向 挖 掘 力
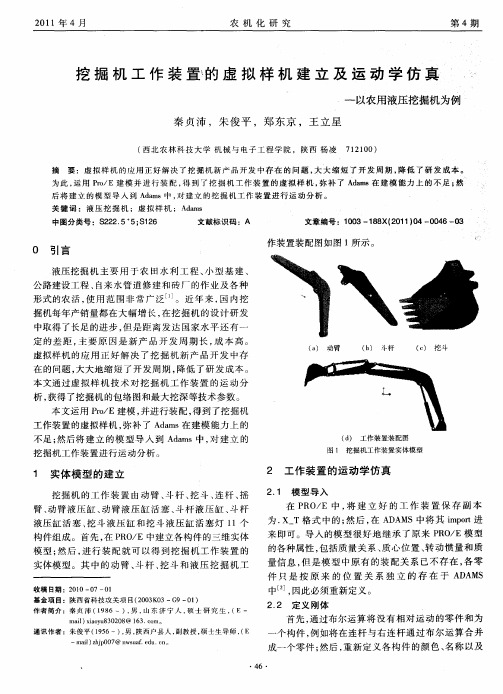
挖掘机工作装置的虚拟样机建立及运动学仿真——以农用液压挖掘机为例
』
;、 ,
t
D
1
[ ] 黄伟. 6 液压 挖掘 机工 作装 置在 A A D MS中 的运动 仿真 分 析 [ ] 质量技术监督研究 ,0 8 5 :7—3 . J. 20 ( ) 2 O
斗杆 液 压缸 的长度 L 和 挖斗 液 压 缸 的长 度 。对 :
挖到 , 可能 引 起 土 壤 崩 塌 而 影 响 机 械 的稳 定 和安 全 但
于类 似 的 多 自由度 问题 , 以 分 为 多 个 运 动 过 程 , 可 每 个 过 程 只有 一个 自由度 , 每个 过程 最后 的状 态 就 是 下
1
.
[ ] 秦成 , 3 史淑玲 . 掘机摇 臂 机构 的虚 拟样 机研 究 [ ] 机 挖 J.
械 工 程 师 ,0 8 3 :3 2 0 ( ) 1 3—14 3. [ 牛 多 青 . 压 挖 掘 机 工 作 装 置 虚 拟 样 机 设 计 及 其 有 限 元 4] 液
分析 [ . D] 合肥 : 安徽农业 大学 ,0 8 20 .
了材 料 属 性 、 义 了运 动 副 和 载 荷 、 加 了驱 动 后 前 定 添 处理 基 本结 束 , 可 以进 行 仿 真 计 算 了 。仿 真 计 算 包 就 括装 配 计算 、 运动 学 计 算 、 力 学计 算 、 平 衡 计 算 和 动 静 线 性 化计 算 J 。
运 动 学计 算 要求 系 统 在 添加 运 动 副和 驱 动后 自由
上 添加 3个 驱 动 , 挖 掘 机 工 作 装 置 具 有 确 定 的 运 则 动 , 以进 行运 动 学 分 析 。建 立 好 的 虚 拟 样 机 如 图 2 可
《大型液压挖掘机工作装置的联合仿真及静动态特性研究》范文

《大型液压挖掘机工作装置的联合仿真及静动态特性研究》篇一一、引言随着现代工业技术的不断发展,大型液压挖掘机作为重要的工程机械之一,其工作装置的性能和效率成为了研究的重要方向。
为了更深入地理解其工作特性和提高工作效率,本文将对大型液压挖掘机工作装置进行联合仿真及静动态特性研究。
本文旨在通过理论分析和仿真实验相结合的方法,探讨其工作过程中的力学特性、动态响应及静态稳定性,为实际工程应用提供理论依据和技术支持。
二、大型液压挖掘机工作装置概述大型液压挖掘机工作装置主要由动臂、斗杆、铲斗等部分组成,通过液压系统驱动,实现挖掘、装载等作业。
其工作性能的优劣直接影响到工程进度和效率。
因此,对其工作装置的静动态特性进行研究具有重要的实际意义。
三、联合仿真方法及模型建立本文采用联合仿真的方法,将理论分析与实际实验相结合,对大型液压挖掘机工作装置进行深入研究。
首先,建立工作装置的数学模型,包括动力学模型、液压系统模型等。
然后,利用仿真软件对模型进行仿真分析,得出工作装置在不同工况下的力学特性和动态响应。
最后,将仿真结果与实际实验数据进行对比,验证模型的准确性。
四、静动态特性研究1. 静态特性研究:在静态工况下,通过仿真和实验研究工作装置的稳定性、刚度和强度等性能指标。
分析不同结构参数和工作条件对静态特性的影响,为优化设计提供依据。
2. 动态特性研究:在动态工况下,研究工作装置的动态响应、振动特性和能量传递等。
通过仿真和实验,分析不同工况下工作装置的动态性能,为提高工作效率和减少能耗提供参考。
五、结果与分析1. 仿真结果:通过联合仿真,得出大型液压挖掘机工作装置在不同工况下的力学特性和动态响应。
仿真结果表明,工作装置在挖掘、装载等作业过程中,受力情况复杂,需要综合考虑多种因素。
2. 实验结果:将仿真结果与实际实验数据进行对比,验证了模型的准确性。
同时,通过实验观察了工作装置在实际工作中的静动态特性,为优化设计和提高工作效率提供了依据。
液压挖掘机工作装置运动学仿真分析_林荣逢
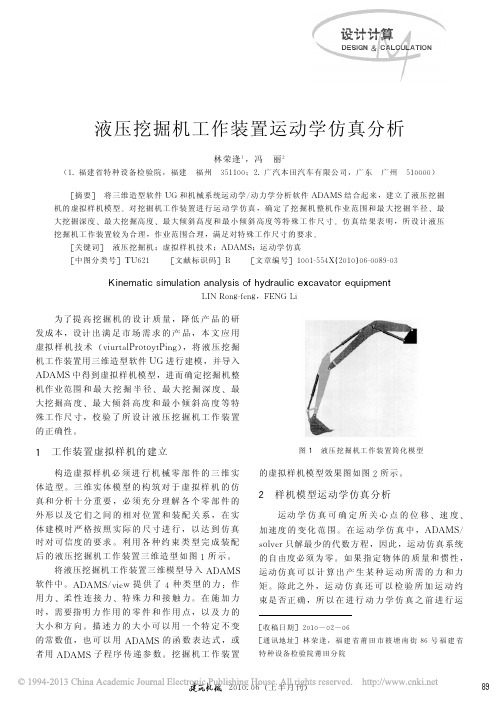
图 7! 动臂液压缸的 ’ + # = 函数
6 5 6! 斗杆液压缸工作仿真 仅以斗 杆 液 压 缸 工 作 进 行 挖 掘 时 $ 铲 斗 的 挖 掘轨迹系 以 动 臂 与 斗 杆 的 铰 点 为 中 心 $ 斗 齿 尖 至 该铰点的距 离 为 半 径 所 作 的 圆 弧 线 $ 同 样 $ 弧 线 的长度与 包 角 决 定 于 斗 杆 液 压 缸 的 行 程 # 当 动 臂 位于最大下倾角并 以 斗 杆 液 压 缸 进 行 挖 掘 工 作 时 $ 可以得到 最 大 的 挖 掘 深 度 $ 并 且 也 有 较 大 的 挖 掘
3 # % 斗杆 液 压 缸 的 长 度 3 !和铲斗液压缸的长度 3 3 ) # 显然 $ 当 3 1% !和 3 )为 某 一 组 确 定 值 时 反 铲
装置就相 应 处 于 一 个 确 定 的 几 何 位 置 # 某 反 铲 工 作装置液压缸运动参数见表 # 所示 #
表 4! 反铲工作液压缸运动参数表 液压缸种类 全缩长度 B : 3 > 动臂液压缸 斗杆液压缸 铲斗液压缸 # K / " ! ! ) # # % " 全伸长度 B : ; < ) # ) K % % ! % ! # ! K # % ) # " ! " :: 最大行程
图 4! 液压挖掘机工作装置简化模型
的虚拟样机模型效果图如图 ! 所示 %
6! 样机模型运动学仿真分析
运动 学 仿 真 可 确 定 所 关 心 点 的 位 移 & 速 度 & 加速度 的 变 化 范 围 % 在 运 动 学 仿 真 中 $ b # F bQC R U W \ 9 T只解最少的代数方程 $ 因 此 $ 运动 仿真 系 统 的自由度必须为 零 % 如 果 指 定 物 体 的 质 量 和 惯 性 $ 运动仿真 可 以 计 算 出 产 生 某 种 运 动 所 需 的 力 和 力 矩 % 除此之外 $ 运 动 仿 真 还 可 以 检 验 所 加 运 动 约 束是否正 确 $ 所 以 在 进 行 动 力 学 仿 真 之 前 进 行 运 !
铲液压挖掘机工作装置虚拟样机研究

E一
乓 簿一 q一
} \ \ \
\ \
I
\_
Ol
2
345
67
时间/s
8 9 :0 ll 12
图4斗齿尖maker一122标记点y方向的位移图
2.2动力学仿真 正铲液压挖掘机的发展较晚,相关理论的研
究也很少,且由于其挖掘过程的复杂性,造成对 挖掘阻力直接分析非常困难。目前国内外还没有 关于矿用正铲液压挖掘机挖掘阻力的经验公式可 循[3 ̄5],因此正铲液压挖掘机的动力学仿真,不能 像反铲那样依据有关理论公式计算出的挖掘阻力 值,在仿真时作为已知载荷添加以实现整个仿真 过程。本文将某70t级矿用正铲液压挖掘机进行现 场测试所得到的挖掘阻力值,作为仿真的已知载 荷,完成挖掘机的动力学仿真。 2.2.1挖掘阻力的获取[6]
品的设计质量。最后对制造的物理样机进行了测试,并对比分析r试验测试数据,为正铲液压挖掘机物理
样机的制造和新机型设计方案的评估提供了有效参考数据。
[关键词]正铲液压挖掘机;工作装置;虚拟样机;运动学和动力学仿真
[中图分类号]TD422.2
[文献标识码]B
[文章编号]1001—554X(2008)07—0081—04
要囊宦ixl05垂垂垂.I量至强.
R嚣5.o匡垂至垂匿垂强. a动臂缸推力变化曲线
时间/s
丢嚣匡重型重型2薤. b斗丰-T缸推力变化曲线
C铲斗缸推力变化曲线 1.测试值2.仿真值 图6仿真结果和测试结果对比图
推力变化曲线。从图中可以看出,仿真结果与测 试结果变化趋势基本一致,仅数值的大小有所偏 差,从而验证了仿真结果的正确性和可靠性。
断界面检测,判断故障是由于塔机司机误操作引 起的还是由于塔机工作参数超出参数设置界面中 控制参数范围引起的。对于一些硬件故障,通过 该界面可以判断故障原因。
液压挖掘机工作装置耦合仿真

液压挖掘机工作装置耦合仿真钟相强;梁利东【摘要】Hydraulic excavator is a typical and complicated engineering machine by combination of mechanical,control and hydraulic system.lt is vital to carry out coupling analysis by use of multiple simulation tools.A hydraulic excavator mechanical model was constructed based on Pro/E 4.0./4 nd hydraulic excavator virtual prototype was finished by use of ADAMS interface function as well as a great deal of kinematics and dynamics simulation analysis was carried on. Thus the flow and angle transfer function of bucket rod hydraulic cylinder was deduced, and mechanical and control simulation for bucket rod hydraulic cylinder was finished coupled with ADAMS/Control and MATLAB/Simulink modules.Simulation results show coupling simulations have certain theory value and practical significance ,which provide evidence for trial and optimization of physical prototype.%液压挖掘机是一种机电液相结合的复杂工程机械,利用多种仿真工具对其进行耦合分析是至关重要的.基于Pro/E 4.0构建液压挖掘机整机机械模型,利用ADAMS接口功能完成挖掘机虚拟样机模型的构建,进行大量的运动学和动力学仿真分析;推导了斗杆液压缸流量和转角控制传递函数,结合ADAMS/Control和MATLAB/Simulink模块完成斗杆液压缸机—电协同耦合仿真.仿真结果表明,耦合仿真具有—定的理论价值和实践意义,为物理样机的试制和优化提供依据.【期刊名称】《机械设计与制造》【年(卷),期】2012(000)006【总页数】3页(P229-231)【关键词】液压挖掘机;ADAMS;虚拟样机技术;Simulink;耦合仿真【作者】钟相强;梁利东【作者单位】安徽工程大学机械与汽车工程学院先进数控和伺服驱动技术安徽省重点实验室,芜湖241000;安徽工程大学机械与汽车工程学院先进数控和伺服驱动技术安徽省重点实验室,芜湖241000【正文语种】中文【中图分类】TH16;TU621;TP391.91 引言液压挖掘机是一种多功能、应用广泛的机—电—液一体化复杂机械设备,其新产品物理样机开发周期长,缺乏市场竞争力,如何提高我国挖掘机总体设计水平和市场占有率成为急需解决的问题。
液压挖掘机动力学仿真与试验分析

Dynamic Simulation and Test Analysis of Hydraulic Excavator
YU Lailingꎬ YIN Chenboꎬ CHEN Changlinꎬ MA Wei
( College of Mechanical and Power Engineeringꎬ Nanjing University of Technologyꎬ Nanjing 210094ꎬ China)
the force curve of the key hinge point. The stress-strain curve of the corresponding position is obtained by testing on the platform and
the correctness of the comparison between the model and the simulation result is verified for cost saving and workload reducing in the
信息技术
於来玲ꎬ等液压挖掘机动力学仿真与试验分析
DOI:10.19344 / j.cnki.issn1671-5276.2021.06.031
液压挖掘机动力学仿真与试验分析
於来玲ꎬ殷晨波ꎬ陈长林ꎬ马伟
( 南京工业大学 机械与动力工程学院ꎬ江苏 南京 210094)
摘 要:为探究液压挖掘机在工作时发生疲劳失效的影响ꎬ基于 SY235 反铲液压挖掘机实验平
400
削土壤的深度和密度有关ꎬ基本可以按线性关系进行计
200
0
根据公式进行理论计算可知ꎬ与W 1 所得的数值进行
20
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
铲的主要部件,其结构有整体式和组合式两种。
动臂。
其优点是结构简单,质量轻而刚度大。
动臂。
虽然使结构和操作复杂化,但在挖掘机作业中可随时大幅度调整上、下动臂之间的夹角,从而提高挖掘机的作业性能,尤其在窄而深的基坑时,容易得到较大距离的垂直挖掘轨迹,提高挖掘质量和生产率。
组合式动臂的优点是,可以根据作业条件随意调整挖挖掘力,且调整时间短。
此外,它的互换工作装置多,可满足各种作业的需要,装车运输方便。
其缺点是质量大、制造成本高,一般上。
的是组合式动臂。
挖掘机反铲装置的分析
作性能参数
量0.8m3;
掘深度4.39m;
掘高度4.64m;
掘半径5.52m;
载高度2.66m;
掘力(最大)52kN。
置运动学分析
示,反铲装置的几何位置取决于动臂油缸的长度L1,斗杆油缸的长度L2和铲斗油缸的长度L3。
当L1、L2和L3为一组定值时,便的一组值与其对应;反之,对于Xv和Yv的一组定值却有许多组L1、L2、L3值与其对应。
图1 动臂机构计算简图
构。
∠UCF是动臂油缸L1的函数。
动臂上任意一点在任一时刻的位置坐标也都是L1的函数。
构。
置参数是动臂油缸L1和斗杆油缸L2的函数。
这里暂先讨论斗杆相对于动臂的运动,即只考虑L2的影响。
斗杆机构与动臂机构性质杆机构,但连杆比不同。
其连杆机构。
动是动臂油缸L1、斗杆油缸L2和铲斗油缸L3的函数,情况较复杂。
这里暂讨论铲斗相对于斗杆的运动。
置动力学分析
力的分析。
工作时,即可用铲斗油缸挖掘(简称转斗挖掘),也可用斗杆油缸挖掘(简称斗杆挖掘),或做复合动作挖掘。
掘阻力的计算。
时,土壤切削力随挖掘深度改变而有明显变化,经实验转斗挖掘时的切削阻力与切削深度基本上成正比。
但总地来说,前半过程切削,因前半过程的切削角不利,产生了较大的切削阻力。
切削阻力的切向分力与土壤硬度、转斗切削半径、挖掘过程中铲斗总转角、铲、切削角、斗侧壁厚度和切削刃挤压土壤的力有关。
转斗挖掘的平均阻力可按平均挖掘深度下的阻力计算,也把半月形切削断面看作面,条形断面的长度可看作成斗齿转过的圆弧长度与其相应之弦的平均值。
一般所谓平均阻力是指装满铲斗的全过程阻力平均值,国挖掘阻力的80%。
实际挖掘力。
到整机理论挖掘力计算时简化假定中忽略的某些因素,则可求得整机的实际挖掘力。
当用于特殊作业时,求整机实际挖掘力必须考虑。
用电计算机分析比较,各种设计方案的挖掘性能或验算已制成挖掘机的挖掘性能表,并与机器的实用或测试结果相对,既可为改进可验证理论计算的正确程度。
在对大量机型进行计算分析的基础上可为优化设计和积累资料提供简化根据。
NX的挖掘机反铲装置运动仿真
环境下反铲装置的建模
cs NX4.0具有强大的三维建模功能,首先绘制各种边界曲线,然后通过曲线生成各种各样的曲面,还可以通过创建旋转、拉伸和扫生成三维实体。
在此图形环境下构建的主要零部件,如图2所示。
图2
的反铲装置的虚拟装配
用的NX装配方法是自底向上,自底向上是指在设计过程中,先设计单个零部件,在此基础上进行装配生成总体设计。
这种装配建模给定配合构件之间的配合约束关系,然后由NX系统自动计算构件的转移矩阵,并实现虚拟装配,如图3所示。
图3
装置的运动仿真
的运动分析模块,就反铲装置的虚拟模型进行运动仿真。
,机构可以认为是一组连接在一起运动的连杆(Links)的集合,NX可用下面三步产生一个运动分析方案。
,创建连杆(Links)。
运动机构中创建代表运动件的连杆。
,创建运动付(Joints)。
建约束连杆运动的运动付。
在某些情况下,可同时创建其他的运动约束特征,如弹簧、阻尼、弹性村套和接触。
,定义运动驱动(Motion Driver)。
仿真后生成的图表,如图4和图5所示。
图5可以看出,运动付的行程,速度基本符合设计要求,其速度趋势与加速度曲线一致,并与理论计算结果吻合较好。
如果速度、行结果反馈到设计阶段,对模型进行重新设计、建模,直到仿真结果符合要求。
这就验证了整个设计过程的合理性。
或其他造型软件生成的虚拟样机模型,利用相应的图形环境可以方便地对液压挖掘机的反铲装置进行运动学和动力学仿真分析。
通过挖掘机最大挖掘速度,最大挖掘行程等基本作业参数,从而为铲斗、斗杆和动臂等零件的强度分析提供依据。
(end)。