基于MATLAB的直流电动机双闭环调速系统的仿真研究
基于MATLAB的直流电机双闭环调速系统的设计与仿真资料

MATLAB课程设计基于MATLAB的直流电机双闭环调速系统的设计与仿真班级:自动化12-2姓名:学号:目录一、目录-----------------------------------------------------------1二、前言-----------------------------------------------------------2三、设计目的及要求--------------------------------------------3四、设计题目及参数--------------------------------------------3五、设计内容过程-----------------------------------------------31.计算电流和转速反馈系数-----------------------------------------32.电流环的动态校正过程--------------------------------------------33.转速环的动态校正过程--------------------------------------------94.建立转速电流双闭环直流调速系统的Simulink仿真模型,对上述分析设计结果进行仿真-------------------------------------14六、设计总结---------------------------------------------------18七、参考文献---------------------------------------------------19二、前言:控制系统理论与技术是现代科学技术的主要内容,以经广泛应用于航空与航天工业、电力工业、核能工业、石油工业、化学工业及冶金工业等众多学科和工程技术领域,并且具有经济、安全、快捷、优化设计和预测的特殊功能等优点,在非工程系统(如社会、管理、经济等系统)中,由于其规模及复杂程度巨大,直接实验几乎不可能,这是通过仿真技术的应用可以获得对系统的某种超前认识,因此仿真技术已经成为对控制系统进行分析、设计和综合研究中很有效的手段。
基于Matlab的直流电动机双闭环调速系统研究
图5双闭环直流电机调速系统整体模型图
图6转速输出波形图
第三章总结展望
通过直流电机转速、电流双闭环调速系统的研究和仿真模型的建立
对电流调节器和转速调节器有了一定的了解。并且运用MATLAB软件和Simulink模块进行仿真和分析,更加直观地了解工程的设计。同时让我对Matlab仿真平台有了较多的认识,也增强了分析问题和解决问题的能力,为以后的设计工程增加了经验。
b.对负载变化起抗扰作用
c.其输出限幅值决定电机允许的最大电流
(1)时间常数的确定
转速环小时间常数近似处理取TΣn=1/KI+Ton =2TΣi+0.02=(2×0.0037+0.02)s=0.027 4s
(2)转速调节器结构选择和参数计算
因为含有积分环节,可按照典型II型系统设计按照设计要求选用PI型调节器,其传递函数WASR(S)=Kn(τns+1)/τns ,按给随和抗干扰性能都比较好的原则,取h=5,则ASR的超前时间常数为τn=hTΣn =5×0.027 4 =0.137 s;
参考文献
[1]王燕平.控制系统仿真与CAD.北京:机械工业出版社,2011
[2]胡寿松.自动控制原理简明教程.北京:科学出版社,2008
[3]刘春艳,闻玉凤.基于MATLAB/Simulink双闭环直流调速系统的仿真研究山西大同大学学报:自然科学版,2014
[4]大功率直流调速系统研究与设计大连海事大学,2013.
(4)近似条件的校验
电流环截止频率ωci=KI=135.1,晶闸管装置传递函数近似条件wci<1/3TS=1/3*0.0017s=196.1s-1满足近似条件;忽略反电动势变化对电流
机电控制系统——基于MATLAB的直流电机双闭环调速系统的设计与仿真
《机电控制系统分析与设计》课程大作业一基于MATLAB的直流电机双闭环调速系统的设计与仿真学院:机电工程学院专业:机械设计制造及其自动化班级:0808108学号:1080810812姓名:林珍坤一、 设计参数转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动。
电机参数:额定功率 200W ; 额定电压 48V ; 额定电流 4A ;额定转速 500r/min ;电枢回路总电阻 R=8Ω; 允许电流过载倍数 λ=2; 电势系数C e =0.04V ·min/r ; 电磁时间常数T L =0.008s ; 机电时间常数 T m =0.5;电流反馈滤波时间常数T oi =0.2ms ; 转速反馈滤波时间常数T on =1ms要求转速调节器和电流调节器的最大输入电压U *nm =U *im =10V ; 两调节器的输出限幅电压为10V ;PWM 功率变换器的的开关频率f=10kHz ; 放大倍数K=4.8; 动态参数设计指标: 稳态无静差;电流超调量i δ≤5%;空载启动到额定转速时的转速超调量δ≤25%; 过渡过程时间t s =0.5s 。
二、设计计算1. 稳态参数计算根据两调节器都选用PI 调节器的结构,稳态时电流和转速偏差均应为零;两调节器的输出限幅值均选择为12V电流反馈系数;A V A VI U im /25.14210nom *=⨯==λβ转速反馈系数:r V r Vn U nm min/02.0min/50010max *⋅===α 2. 电流环设计(1)确定时间常数电流滤波时间常数T oi =0.2ms ,按电流环小时间常数环节的近似处理方法,则s T T T oi s i 0003.00002.00001.0=+=+=∑(2)选择电流调节器结构电流环可按典型Ⅰ型系统进行设计。
电流调节器选用PI 调节器,其传递函数为ss K s W i i iACR ττ1)(+= (3)选择调节器参数 超前时间常数:i τ=T L =0.008s 电流环超调量为σi≤5%,电流环开环增益:应取5.0=∑i I T K ,则I K =i T ∑5.0=0003.05.0=1666.67 于是,电流调节器比例系数为0.00881666.6717.781.25 4.8i i I s R K K K τβ⨯=⋅=⨯=⨯ (4)检验近似条件电流环截止频率ci ω=I K =1666. 67 1/s1)近似条件1:ci ω ≤sT 31现在,s T 31=0003.01=3333.33>ci ω,满足近似条件。
基于Matlab无刷直流电机双闭环调速系统仿真研究_张克涵
绕组的相电流幅值。 BLDCM 的运动方程可表示为 J· dω = Te - Tl - kb ω dt ( 3)
式中,J 为电机转子的转动惯量,ω 为电机转子的机 械角速度,T e 为电机电磁转矩, T l 为电机转子负载 转矩,k b 为转子对轴承的阻尼系数。
2
基于 Matlab / Simulink 的 BLDCM 调 速系统模型的建立
[23 ]
0
引
言
永磁无 刷 直 流 电 机 ( Brushless DC Motor, BLDCM) 以其体积小、 效率高、 转动惯量小、 控制方法 相对简单、控制效果较好等优点, 同时还保留了普 通直流电动机优良的机械特性, 广泛应用于伺服控 制、航空航天、 机器人等领域
[1 ]
,
也为实际电机调速系统的设计提供了新的思路 。
真模型的新方法。在 Matlab / Simulink 环境下,把功能模块和 S 函数相结合, 实现了 BLDCM 本体模块、 速度控制模 块、电流滞环控制模块等 ,再进行功能模块的有机整合 , 搭建了 BLDCM 调速系统的仿真模型。 仿真和试验结果证 明了该方法的有效性 ,同时也适用于验证其他控制算法的合理性 ,为实际电机调速系统设计提供了新的思路 。 关键词: 无刷直流电机; 电流滞环; 双闭环 中图分类号: TM36 + 1 文献标志码: A 文章编号: 1001-6848 ( 2015 ) 02-0044-05
2期
张克涵等: 基于 Matlab 无刷直流电机双闭环调速系统仿真研究
· 45 ·
( 4 ) 不 考 虑 电 枢 反 应, 气 隙 磁 场 分 布 近 似 为 120° 平顶矩形波,三相绕组完全对称。 则根据 BLDCM 特性,可建立其电压、转矩与运 动方程: 1. 1 BLDCM 的电压方程 假设 电 机 各 相 绕 组 及 空 间 结 构 完 全 对 称, 则 BLDCM 的定子三相绕组的电压平衡方程为 : U an R U = 0 bn U cn 0 0 R 0 0 ia L - M 0 ib + 0 R ic 0 0 L -M 0 0 · L - M ( 1) 0
基于matlab的直流双闭环调速系统设计与仿真
1.2.2 确定将电流环设计成何种典型系统
根据设计要求:σi ≤5%,而且 Tl / T∑i = 0.03/ 0.003 7 = 8.11<10,因此设计成典型 I 型系统。
1.2.3 电流调节器的结构选择
作者简介:姬宣德,男,1 9 8 0 年生,河南洛阳人,毕业于河南科技 大学控制工程理论与控制方向专业,硕士。研究方向:变频调速与变频 器;运动控制方向。
1 直流调速系统的理论设计
1.1 系统组成及要求
本文研究的对象为直流双闭环调速系统,其系统
动态结构框图如图 1 所示。
(1)系统参数 电动机:UN = 200 V,IN = 136 A, nN = 1 460 r/ min;Ce = 0.132 V·r/ min;允许过载倍 数 λ = 1.5;三相桥式整流装置放大倍数 Ks = 40;电 枢回路总电阻 R∑ = 0.5 Ω;时间常数 Tl = 0.03 s;Tm = 0.18 s,电流反馈系数 β = 0.05 V/ A; 转速反馈系数
2.2 仿真调试分析
通过以上仿真分析,与理想的电动机启动特性相
比,仿真结果与系统
要求具有差距。出现
上述情况的原因可以
从工程设计过程中不
难看出,在“典型系统
的最佳设计法”中,非
线性环节线性化处
理、近似处理、降阶
处理、调节器的饱和
非线性等因素导致了
图 2 直流双闭环调速系统的仿真模型
工程设计与性能要求
Mining & Processing Equipment
图 4 程序流程图
( 修改稿日期:2 0 0 5 - 0 5 - 1 9 )
基于MATLAB的双闭环直流调速系统仿真研究
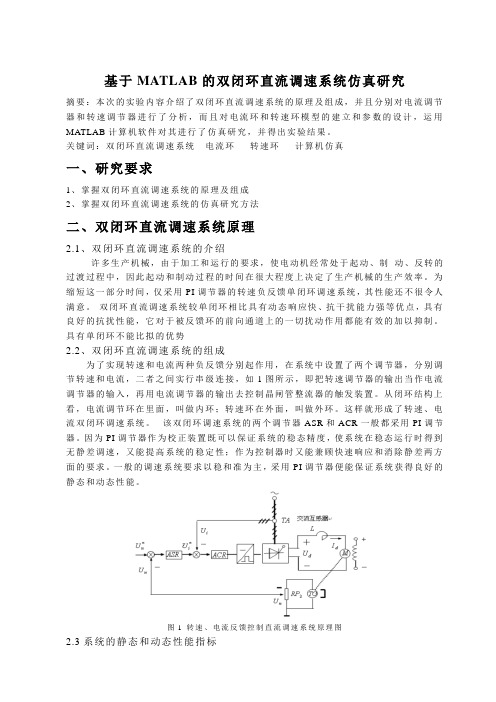
基于MATLAB的双闭环直流调速系统仿真研究摘要:本次的实验内容介绍了双闭环直流调速系统的原理及组成,并且分别对电流调节器和转速调节器进行了分析,而且对电流环和转速环模型的建立和参数的设计,运用MATLAB计算机软件对其进行了仿真研究,并得出实验结果。
关键词:双闭环直流调速系统电流环转速环计算机仿真一、研究要求1、掌握双闭环直流调速系统的原理及组成2、掌握双闭环直流调速系统的仿真研究方法二、双闭环直流调速系统原理2.1、双闭环直流调速系统的介绍许多生产机械,由于加工和运行的要求,使电动机经常处于起动、制动、反转的过渡过程中,因此起动和制动过程的时间在很大程度上决定了生产机械的生产效率。
为缩短这一部分时间,仅采用PI调节器的转速负反馈单闭环调速系统,其性能还不很令人满意。
双闭环直流调速系统较单闭环相比具有动态响应快、抗干扰能力强等优点,具有良好的抗扰性能,它对于被反馈环的前向通道上的一切扰动作用都能有效的加以抑制。
具有单闭环不能比拟的优势2.2、双闭环直流调速系统的组成为了实现转速和电流两种负反馈分别起作用,在系统中设置了两个调节器,分别调节转速和电流,二者之间实行串级连接,如1图所示,即把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制晶闸管整流器的触发装置。
从闭环结构上看,电流调节环在里面,叫做内环;转速环在外面,叫做外环。
这样就形成了转速、电流双闭环调速系统。
该双闭环调速系统的两个调节器ASR和ACR一般都采用PI调节器。
因为PI调节器作为校正装置既可以保证系统的稳态精度,使系统在稳态运行时得到无静差调速,又能提高系统的稳定性;作为控制器时又能兼顾快速响应和消除静差两方面的要求。
一般的调速系统要求以稳和准为主,采用PI调节器便能保证系统获得良好的静态和动态性能。
图1 转速、电流反馈控制直流调速系统原理图2.3系统的静态和动态性能指标2.3.1 系统的静态性能指标首先,画出其稳态系统结构框图,如图2所示图2 双闭环直流调速系统的稳态结构图由于当调节器饱和时,输出达到限幅值,输入量的变化不再影响输出量,除非有反向的输入信号使调节器退出饱和。
基于MATLAB的直流电机双闭环调速系统的设计与仿真

基于MATLAB的直流电机双闭环调速系统的设计与仿真《机电控制系统分析与设计》课程大作业之一基于MATLAB 的直流电机双闭环调速系统的设计与仿真1 计算电流和转速反馈系数β=U im∗dm=10V=1.25Ωα=U nm∗=10=0.02V∙min/r2 按工程设计法,详细写出电流环的动态校正过程和设计结果根据设计的一般原则“先内环后外环”,从内环开始,逐步向外扩展。
在这里,首先设计电流调节器,然后把整个电流环看作是转速调节系统中的一个环节,再设计转速调节器。
电流调节器设计分为以下几个步骤:a 电流环结构图的简化1)忽略反电动势的动态影响在按动态性能设计电流环时,可以暂不考虑反电动势变化的动态影响,即∆E ≈0。
这时,电流环如下图所示。
2) 等效成单位负反馈系统如果把给定滤波和反馈滤波两个环节都等效地移到环内,同时把给定信号改成U *i (s ) /β ,则电流环便等效成单位负反馈系统。
3) 小惯性环节近似处理由于T s 和 T 0i 一般都比T l 小得多,可以当作小惯性群而近似地看作是一个惯性环节,其时间常数为T ∑i = T s + T oi 简化的近似条件为ois ci 131T T ≤ω电流环结构图最终简化成图。
b 电流调节器结构的选择 1) 典型系统的选择:从稳态要求上看,希望电流无静差,以得到理想的堵转特性,采用 I 型系统就够了。
从动态要求上看,实际系统不允许电枢电流在突加控制作用时有太大的超调,以保证电流在动态过程中不超过允许值,而对电网电压波动的及时抗扰作用只是次要的因素,为此,电流环应以跟随性能为主,应选用典型I 型系统 2) 电流调节器选择电流环的控制对象是双惯性型的,要校正成典型 I 型系统,显然应采用PI型的电流调节器,其传递函数可以写成ss K s W i i i ACR )1()(ττ+=K i — 电流调节器的比例系数;τi — 电流调节器的超前时间常数3) 校正后电流环的结构和特性为了让调节器零点与控制对象的大时间常数极点对消,选择则电流环的动态结构图便成为图a 所示的典型形式,其中a) 动态结构图:b) 开环对数幅频特性c. 电流调节器的参数计算电流调节器的参数有:K i 和 τi ,其msT l8i==τRK K K i siI τβ=中 τi 已选定,剩下的只有比例系数 K i , 可根据所需要的动态性能指标选取。
双闭环直流电动机调速系统设计及MATLAB仿真基于直流电动机调速系统的研究
双闭环直流电动机调速系统设计及MATLAB仿真基于直流电动机调速系统的研究摘要:本文研究了双闭环直流电动机调速系统的设计及MATLAB仿真。
首先介绍了直流电动机调速系统的基本原理,然后通过建立数学模型,设计了双闭环调速系统的控制器,并利用MATLAB进行了系统的仿真实验。
仿真结果表明,双闭环调速系统能够有效地提高电动机的调速性能,使其在不同负载条件下保持稳定的转速。
关键词:双闭环调速系统、直流电动机、MATLAB仿真1.引言直流电动机调速系统是工业自动化控制中的常用控制系统之一、它广泛应用于机械设备、工业生产线以及交通运输等领域。
传统的直流电动机调速系统采用单闭环控制,其调速性能较差,对负载扰动不敏感。
因此,研究双闭环直流电动机调速系统,对于提高电动机的调速性能具有重要意义。
2.直流电动机调速系统设计原理直流电动机调速系统是通过调节电源电压或者改变电动机绕组的接线方式来实现。
系统主要由电动机、控制器以及反馈元件组成。
在传统的单闭环调速系统中,控制器根据电机的转速反馈信号与给定的转速信号之差,产生输出信号控制电机的转速。
然而,单闭环调速系统对负载扰动不敏感,容易出现转速不稳定等问题。
双闭环调速系统是在传统的单闭环调速系统的基础上增加了一个速度环,用于对电机的速度进行闭环控制。
速度环通过调节电机的输出力矩,实现对电机转速的调节。
双闭环调速系统可以及时调整电机输出力矩,使电机在负载扰动下保持稳定的转速。
3.双闭环直流电动机调速系统的控制器设计双闭环直流电动机调速系统的控制器主要由速度环控制器和电流环控制器组成。
速度环控制器根据速度反馈信号与给定的速度信号之差,产生电压控制信号,用于控制电机的输出力矩。
电流环控制器根据电流反馈信号与给定的电流信号之差,产生电压控制信号,用于控制电机的转矩。
具体的控制器设计需要根据电机的数学模型和系统性能要求进行。
4.MATLAB仿真实验本文利用MATLAB软件对双闭环直流电动机调速系统进行了仿真实验。
基于Matlab的直流电动机双闭环调速系统的仿真研究
的转速 反馈 信号 的差值 输入 到速 度调节 器 A R中 , S 其 输 出作 为 内环 电流 环 的给定用来 控制 电枢 电流 和 转矩 T, 而实现 转 速调 节 。AS 输 出 与 电流 反馈 从 R
基于MATLAB 的直流电动机双闭环调速系统的仿真研究
基于MATLAB 的直流电动机双闭环调速系统的仿真研究摘要:本文介绍了利用MATLAB 软件中的Simulink 组件对直流电动机双闭环调速系统进行仿真,获得了反映系统性能的曲线,并对仿真结果进行了比较分析。
结果表明, 应用MATLAB 进行系统仿真具有方便、高效及可靠性高等优点。
关键词:MATLAB; 直流电动机; 双闭环调速系统; 仿真Simulation Study of a DC Speed Regulation SystemAbstract:This paper presents the simulation study of a DC speed regulation system by using the Simulink modules. The resultindicates that, the system simulation by using MATLAB is convenient and highly effective.Keywords:MATLAB ; DCmotor ; two-loop speed regulation system; simulation一、引言有些调速系统,如龙门刨床、轧钢机等经常处于正反转状态,为了提高生产效率和加工质量,要求尽量缩短过渡过程的时间。
速度和电流双闭环直流调速系统(简称双闭环调速系统)是由电流和转速两个调节器进行综合调节的,可获得良好的静、动态性能。
由于这样的系统其转速和电流响应曲线很难精确绘制,不便于对系统特性的分析和理解。
本文通过一个直流电动机双闭环调速系统实例,就如何利用MATLAB 软件的仿真功能对系统进行分析做一些探讨,对系统的设计和改进具有一定的参考意义。
转速、电流双闭环调速系统属于多环控制系统。
目前都采用由内向外,一环包围一环的系统结构。
每一闭环都设有本环的调节器,构成一个完整的闭环系统。
设计多环系统的一般方法是,由内环向外环一环一环地进行设计。
基于MATLAB的直流电机双闭环调速系统仿真

基于MATLAB的直流电机双闭环调速系统仿真基于MATLAB的直流电机双闭环调速系统仿真姓名:张xx学号:*********x华北电力大学2014年4月基于MATLAB的直流电机双闭环调速系统摘要直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。
该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。
并通过Simulink进行系统的数学建模和系统仿真,分析双闭环直流调速系统的特性。
关键词:直流电机,双闭环,PWM,转速调节器,电流调节器,SimulinkStudy of the Speed-adjusting Technology for DC Motor based onMatlabAbstractThe design uses thyristors, diodes and other devices designs a speed, current double-loop SCR DC converter system. The system sets up the current detecting aspect, the currentregulator ACR and the speed detecting link, speed regulator ASR, composes the current central and the speed central, the former through the feedback of the current components to level off the current, the latter through the feedback of speed detecting device to maintain the speed stably and finally eliminates the deviation of speed bias.,thus allowing the system to the purpose of regulating the current and speed. when the system starts, the speed outer ring saturats non-functional, the current inner ring plays a major role to regulate the starting current to maintain the maximum so that the speed linear change, to reach a given value; when it operates steadily, the speed negative feedback from the outer ring plays a major role ,to let the speed changes with the given speed voltage , at the same time the current inner ring regulates the armature current of motor adjustment to balance the load current.Simulink for system through mathematical modeling and system simulation. Finally display control system model and the results of anti-truth.Keywords: DC motor, Double-loop, PWM, the speed regulator, the current regulator,Simulink目录前言 (5)第一章绪论 (7)1.1直流调速系统的概述 (7)1.1.1直流电动机的调速方法 (7)1.2 PWM的相关介绍 (8)第二章总体方案设计 (9)2.1 方案比较 (9)2.2 方案论证 (10)2.3 方案选择 (10)2.4设计参数 (11)第三章单元模块的仿真电路设计 (11)3.1转速给定电路设计 (11)3.2转速检测电路设计 (11)3.3电流检测电路设计 (12)3.4 整流及晶闸管保护电路设计 (13)第四章双闭环直流调速系统的仿真设计 (13)4.1转速、电流双闭环直流调速系统的组成及其静特性 (14)4.1.1双闭环调速系统的组成 (14)4.1.2稳态结构框图和静特性 (16)4.1.3 稳态参数计算 (18)4.2转速、电流双闭环直流调速系统的动态模型184.2.1 动态抗扰性能分析 (20)4.3 调节器的设计 (21)4.3.1 电流调节器的设计 (22)4.3.2 转速调节器的设计 (24)4.3.3调速系统的开环传递函数 (26)第五章系统调试 (27)5.1系统MATLAB仿真 (27)5.2 系统的建模与参数设置 (27)5.3 系统仿真结果的输出及结果分析 (28)前言自70年代以来,国外在电气传动领域内,大量地采用了“晶闸管直流电动机调速”技术(简称KZ—D调速系统),尽管当今功率半导体变流技术已有了突飞猛进的发展,但在工业生产中KZ—D系统的应用还是占有相当的比重。
直流电动机双闭环调速系统MATLAB仿真实验报告

本科上机大作业报告课程名称:电机控制姓名:学号:学院:电气工程学院专业:电气工程及其自动化指导教师:提交日期:20年月日一、作业目的1.熟悉电机的控制与仿真;2.熟悉matlab和simulink等相关仿真软件的操作;3.熟悉在仿真中各参数变化和不同控制器对电机运行的影响。
二、作业要求对直流电动机双闭环调速进行仿真1.描述每个模块的功能2.仿真结果分析:包括转速改变、转矩改变下电机运行性能,并解释相应现象3.转速PI调节器参数对电机运行性能的影响4.电流调节器改用PI调节器三、实验设备MATLAB、simulink四、实验原理1.双闭环系统结构如图:该系统通过电流负反馈和速度负反馈两个反馈闭环实现对电机的控制,其内环是电流控制环,外环是转速控制环。
内环由电流调节器LT,晶闸管移相触发器CF,晶闸管整流器和电动机电枢回路所组成。
电流调节器的给定信号un。
与电机电枢回路的电流反馈信号相比较,其差值送人电流调节器.由调节器的输出通过移相触发器控制整流桥的输出电压。
在这个电压的作用下电机的电流及转矩将相应地发生变化。
电流反馈信号可以通过直流互感器取白肖流电枢回路,也可以用交流互感器取自整流桥的交流输人电流,然后经整流面得。
这两种办法所得结果相同,但后者应用较多,因为交流互感器结构比较简单。
当电流调节器的给定信号u n大于电流反馈信号uf,其差值为正时,经过调节器控制整流桥的移相角α,使整流输出电压升高,电枢电流增大。
反之,当给定信号u n 小于电流反馈信号时,使整流桥输出电压降低,电流减小,它力图使电枢电流与电流给定值相等。
外环是速度环,其中有一个速度调节器ST,在调节器的输入端送入一个速度给定信号u g,由它规定电机运行的转速。
另一个速度反馈信号u fn米自与电机同轴的测速发电机TG。
这个速度给定信号和实际转速反馈信号之差输人到速度调节器,由速度调节器的输出信号u n作电流调节器输人送到电流调节器,通过前面所讲的电流调节环的控制作用调节电机的.电枢电流Ia和转矩T ,使电机转速发生变化,最后达到转速的给定值。
直流电动机双闭环调速系统MATLAB仿真实验报告

直流电动机双闭环调速系统MATLAB仿真实验报告
实验目的:
本实验旨在设计并实现直流电动机的双闭环调速系统,并使用MATLAB进行仿真实验,验证系统的性能和稳定性。
实验原理:
直流电动机调速系统是通过改变电机的输入电压来实现调速的。
双闭环调速系统采用了速度环和电流环两个闭环控制器,其中速度环的输入为期望转速和实际转速的误差,输出为电机的电流设定值;电流环的输入为速度环输出的电流设定值和实际电流的误差,输出为电机的输入电压。
实验步骤:
1.建立直流电动机的数学模型。
2.设计速度环控制器。
3.设计电流环控制器。
4.进行系统仿真实验。
实验结果:
经过仿真实验,得到了直流电动机双闭环调速系统的性能指标,包括上升时间、峰值过渡性能和稳态误差等。
同时,还绘制了调速曲线和相应的控制输入曲线,分析了调速系统的性能和稳定性。
实验结论:
通过对直流电动机双闭环调速系统的仿真实验,验证了系统的性能和
稳定性。
实验结果表明,所设计的双闭环控制器能够实现快速且稳定的直
流电动机调速,满足了实际工程应用的需求。
实验心得:
本实验通过使用MATLAB进行仿真实验,深入理解了直流电动机的双
闭环调速系统原理和实现方式。
通过实验,我不仅熟悉了MATLAB的使用,还掌握了直流电动机的调速方法和控制器设计的原则。
同时,实验中遇到
了一些问题,比如系统的超调过大等,通过调整控制器参数和优化系统结
构等方法,最终解决了这些问题。
通过本次实验,我对直流电动机调速系
统有了更加深入的理解,为之后的工程应用打下了坚实的基础。
基于某MATLAB地直流电机双闭环调速系统仿真
基于MATLAB的直流电机双闭环调速系统仿真姓名:张xx学号:113220110x华北电力大学2014年4月基于MATLAB的直流电机双闭环调速系统摘要直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。
该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。
并通过Simulink进行系统的数学建模和系统仿真,分析双闭环直流调速系统的特性。
关键词:直流电机,双闭环,PWM,转速调节器,电流调节器,SimulinkStudy of the Speed-adjusting Technology for DC Motor based onMatlabAbstractThe design uses thyristors, diodes and other devices designs a speed, current double-loop SCR DC converter system. The system sets up the current detecting aspect, the current regulator ACR and the speed detecting link, speed regulator ASR, composes the current central and the speed central, the former through the feedback of the current components to level off the current, the latter through the feedback of speed detecting device to maintain the speed stably and finally eliminates the deviation of speed bias.,thus allowing the system to the purpose of regulating the current and speed. when the system starts, the speed outer ring saturats non-functional, the current inner ring plays a major role to regulate the starting current to maintain the maximum so that the speed linear change, to reach a given value; when it operates steadily, the speed negative feedback from the outer ring plays a major role ,to let the speed changes with the given speed voltage , at the same time the current inner ring regulates the armature current of motor adjustment to balance the load current. Simulink for system through mathematical modeling and system simulation. Finally display control system model and the results of anti-truth.Keywords: DC motor, Double-loop, PWM, the speed regulator, the current regulator,Simulink目录前言 (4)第一章绪论 (6)1.1直流调速系统的概述 (6)1.1.1直流电动机的调速方法 (6)1.2 PWM的相关介绍 (7)第二章总体方案设计 (8)2.1 方案比较 (8)2.2 方案论证 (8)2.3 方案选择 (9)2.4设计参数 (9)第三章单元模块的仿真电路设计 (10)3.1转速给定电路设计 (10)3.2转速检测电路设计 (10)3.3电流检测电路设计 (11)3.4 整流及晶闸管保护电路设计 (12)第四章双闭环直流调速系统的仿真设计 (12)4.1转速、电流双闭环直流调速系统的组成及其静特性 (13)4.1.1双闭环调速系统的组成 (13)4.1.2稳态结构框图和静特性 (15)4.1.3 稳态参数计算 (17)4.2转速、电流双闭环直流调速系统的动态模型 (17)4.2.1 动态抗扰性能分析 (19)4.3 调节器的设计 (20)4.3.1 电流调节器的设计 (21)4.3.2 转速调节器的设计 (23)4.3.3调速系统的开环传递函数 (25)第五章系统调试 (25)5.1系统MATLAB仿真 (25)5.2 系统的建模与参数设置 (25)5.3 系统仿真结果的输出及结果分析 (26)前言自70年代以来,国外在电气传动领域内,大量地采用了“晶闸管直流电动机调速”技术(简称KZ—D调速系统),尽管当今功率半导体变流技术已有了突飞猛进的发展,但在工业生产中KZ—D系统的应用还是占有相当的比重。
基于MATLAB的直流电机双闭环调速系统仿真

基于MATLAB的直流电机双闭环调速系统仿真姓名:张xx华北电力大学2014年4月基于MATLAB的直流电机双闭环调速系统摘要直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。
从控制的角度来看,直流调速还是交流拖动系统的基础。
该系统中设置了电流检测环节、电流调节器以及转速检测环节、转速调节器,构成了电流环和转速环,前者通过电流元件的反馈作用稳定电流,后者通过转速检测元件的反馈作用保持转速稳定,最终消除转速偏差,从而使系统达到调节电流和转速的目的。
该系统起动时,转速外环饱和不起作用,电流内环起主要作用,调节起动电流保持最大值,使转速线性变化,迅速达到给定值;稳态运行时,转速负反馈外环起主要作用,使转速随转速给定电压的变化而变化,电流内环跟随转速外环调节电机的电枢电流以平衡负载电流。
并通过Simulink进行系统的数学建模和系统仿真,分析双闭环直流调速系统的特性。
关键词:直流电机,双闭环,PWM,转速调节器,电流调节器,SimulinkStudy of the Speed-adjusting Technology for DC Motor based onMatlabAbstractThe design uses thyristors, diodes and other devices designs a speed, current double-loop SCR DC converter system. The system sets up the current detecting aspect, the current regulator ACR and the speed detecting link, speed regulator ASR, composes the current central and the speed central, the former through the feedback of the current components to level off the current, the latter through the feedback of speed detecting device to maintain the speed stably and finally eliminates the deviation of speed bias.,thus allowing the system to the purpose of regulating the current and speed. when the system starts, the speed outer ring saturats non-functional, the current inner ring plays a major role to regulate the starting current to maintain the maximum so that the speed linear change, to reach a given value; when it operates steadily, the speed negative feedback from the outer ring plays a major role ,to let the speed changes with the given speed voltage , at the same time th e current inner ring regulates the armature current of motor adjustment to balance the load current. Simulink for system through mathematical modeling and system simulation. Finally display control system model and the results of anti-truth.Keywords: DC motor, Double-loop, PWM, the speed regulator, the current regulator,Simulink目录前言 (1)第一章绪论 (3)1.1直流调速系统的概述 (3)1.1.1直流电动机的调速方法 (3)1.2 PWM的相关介绍 (4)第二章总体方案设计 (4)2.1 方案比较 (4)2.2 方案论证 (5)2.3 方案选择 (5)2.4设计参数 (6)第三章单元模块的仿真电路设计 (6)3.1转速给定电路设计 (6)3.2转速检测电路设计 (7)3.3电流检测电路设计 (7)3.4 整流及晶闸管保护电路设计 (7)第四章双闭环直流调速系统的仿真设计 (7)4.1转速、电流双闭环直流调速系统的组成及其静特性 (7)........................................................... 错误!未定义书签。
基于Matlab的双闭环直流电机调速系统的仿真
Ab ta t DC m tr a o ds e daj sa lp roma c .ntip p rte eino h o beco e sr c: oo sa o e du tbe e r n e I s a e,h s ed u l lsd h g p f h d g ft
文献标 识码 :A
文章 编号 : 10 .8 22 1)20 3 .3 0 34 6 (0 10 .0 00
M a l b- a e i u a i n o u l o e o ta - s d S m l to f b Do b e Cl s d Lo p DC o o M tr Dr v sS s e i e y t m
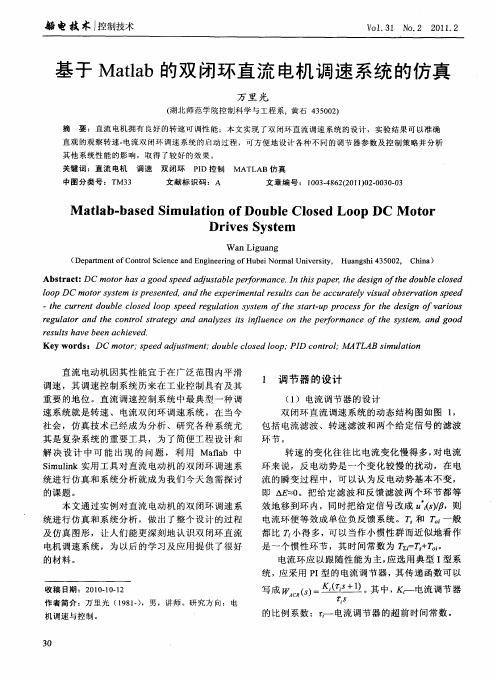
直观 的观察转速 - 电流双 闭环调 速系 统的启 动过程 ,可方 便地 设计 各种不 同 的调节器 参数 及控制 策略 并分 析
其 他 系 统 性 能 的 影 响 ,取 得 了较 好 的 效 果 。 关 键 词 : 直 流 电机 调速 双 闭环 PD控制 I MAT AB 仿 真 L
中图分 类号 :T 3 M3
rg ltra dtec nr l taey a d a a zsi n u n e o h e o m n eo esse a dg o e uao n o t r tg n n l e t i e c ntep r r a c t y tm, n o d h os y s f l f f h
基于MATLAB直流双闭环调速系统仿真研究
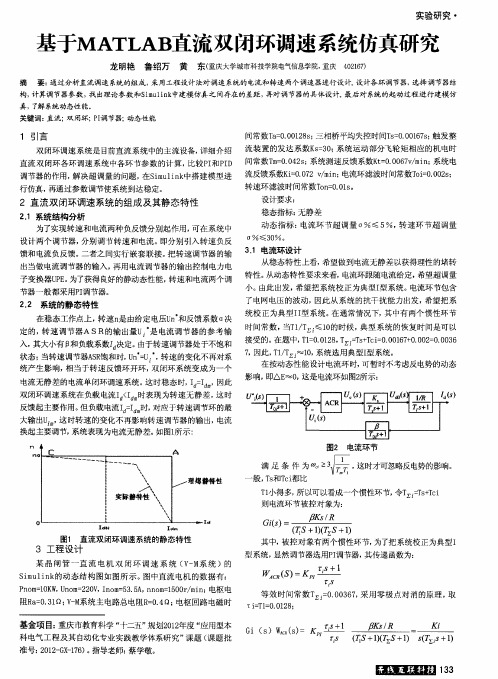
图2 电流环节
一
般, T s 和T c i 都比
满 足 条 件 为 1 / 表, 这 时 才 可 忽 略 反 电 势 的 影 响 。
T 1 小得多, 所 以可 以看成一个惯性环节, 令T ; = T s + T c i 则 电流环 节被 控对象为:
G :
图1 直流双 闭环调速系统的静态特性
2 . 2 系统的静态特性
在稳态工作点上, 转 速n 是 由给定电压u n 和反馈 系数 a 决
定 的, 转 速调 节器 A s R的输 出量U 是 电流调 节器 的参 考输 入, 其大小有B 和负载系数J 决定。由于转速调节器处于不饱和
统校 正为典型I I 型 系统。 在 通常情况下, 其中有 两个惯性环节 时间常数 , 当T 1 / T ≤i 0 的时候 , 典型系统 的恢 复时间是可 以 接受的。 在 题中, T I = O . 0 1 2 8 , T : = T s + T c i = O . 0 0 1 6 7 + 0 . 0 0 2 = 0 . 0 0 3 6
( + 1 ) ( +1 ) 其中, 被控 对象有两个惯 性环 节, 为了把 系统校正为典型I
型系统, 显然调节器选用P I 调节器, 其传递 函数为:
( ) :
三
f-
等效 时间常数 T = O . 0 0 3 6 7 , 采用 零极 点对 消的原理 , 取
T i _ T 1 = 0 . 0 1 2 8 :
, 因此, T 1 / T 1 O , 系统选 用典型I 型系统。 状态 ; 当转速调节器A S R 饱和时, u n ’ = u ’ , 转速 的变化不再对系 7 在按动态性 能设计电流环 时, 可暂时不考虑反电势 的动态 统产 生影响, 相当于转速 反馈 环开环, 双闭环系统变成 为一个 影响, 即△E 一0 , 这是电流环如图2 所示: 电流无静 差的电流单 闭环调速系统 。 这 时稳态时, I = I 因此 双 闭环调速 系统在负载 电流I < I 时表现为转速 无静差 , 这 时 反馈起主要作用。 但 负载 电流I = I 时, 对应于转速调节环的最 大输 出U 这时转速 的变化不再影响转速 调节器 的输 出, 电流 换起 主要调节, 系统表 现为电流无静差。 如 图1 所示 :
基于matlab的直流电机双闭环调速系统仿真

基于Matlab的直流电机双闭环调速系统仿真本文将介绍使用Matlab软件进行直流电机双闭环调速系统的仿真。
直流电机调速系统是工业控制领域中常见的一种控制系统,通过控制电机的输入电压,调节电机的转速。
双闭环调速系统在传统的单闭环调速系统的基础上增加了速度环和电流环,提高了系统的稳定性和响应速度。
1. 直流电机调速系统介绍直流电机调速系统主要包括电机、电机功率器件、传感器和控制器等组成部分。
其中,电机是被控对象,通过控制电机功率器件的输入电压,可以调节电机的转速。
传感器用于实时测量电机的转速和转矩,将测量值反馈给控制器。
控制器根据测量值和设定值的差异,生成控制信号,控制输入电压,使得电机的转速达到设定值,并保持在设定值附近。
2. 双闭环调速系统结构双闭环调速系统在传统的单闭环调速系统的基础上增加了速度环和电流环,使得系统的控制更加精确。
速度环对电机的速度进行控制,根据速度误差生成调节电压;电流环则对电机的电流进行控制,根据电流误差生成最终的控制信号。
双闭环调速系统的结构如下所示:_______ _______| | e1 | |r +--+ | |---+-->| C |---+--> u| | | | |_____| |+--->| P1 | | | +-------+| | | _______ | | |y <---+ |_____| _|_ | | | | |_______ | | C1 | | | P2 || | | |_____| | | |--| P0 |--+ +--> | |t |_____| | +-------+y其中,r为输入信号(设定值),y为输出信号(测量值),e1为速度误差,e2为电流误差,P1为速度环比例控制器,P2为电流环比例控制器,C1为电流环输入限幅器,C为速度环输入限幅器,u为控制信号(调节电压)。
3. 双闭环调速系统仿真实现步骤步骤一:建立模型在Matlab软件中,建立直流电机的数学模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业控制与应用
Industry Control and Applications L 2 = v − 2 A 1 π vi * + i 2 Aω ω
《 自 动 化 技 术 与 应 用 》2 0 0 7 年 第 2 6 卷 第 1 1 期
, 其中 v i 是对应于系统给
定电梯运行距离时能达到的最高速度 ; T C 是相应曲线的运行总时 间。 上式是关于 v i 的一元二次方程, 其各项系数都已知, 而且必 定存在唯一解, 故可以由求根公式得到 vi 值:
(a) Ki=5、 Kn=3 (b) Ki=10、 Kn=15 图3 双闭环调速系统控制效果
74 | Techniques of Automation & Applications
. ( a) 负 载 在t = 6s时 刻 加 至15 N m (b) 负载在t = 6 s时 刻 加 至50 N . m 图5 负载变化时调速结果 (下转第 21 页)
外面,电流环作为副环放在里面,这样可以抑制电网电压扰动对转 速的影响。 双闭环调速系统原理框图如图1所示[4]。
2 直流电动机双闭环调速系统数学模 型[1][2]
双闭环调速系统,主电路是由交流电源、同步脉冲触发器、 晶闸管整流桥、 平波电抗器、 直流电动机等部分组成。 控制电路 包括:给定环节、速度调节器 ASR、电流调节 ACR、限幅器、偏 置电路、反相器、电流反馈环节、速度反馈环节等。 由于调整系统的主要参量为转速,故将转速环作为主环放在
[3][4]Байду номын сангаас
保持不变,拖动系统恒加速,转速线性增长。 第三阶段,当转速达到 给定值后,转速调节器的给定电压与反馈电压平衡,输入偏差为零, 但是由于积分的作用,其输出还很大,所以出现超调。 转速超调之 后,ASR输入端出现负偏差电压,使它退出饱和状态,进入线性调节 阶段,使速度保持恒定,实际仿真结果非常接近理论分析的波形。 。 首先建立双闭环调速系
作者简介: 高国贤(1 9 7 0 - ) ,男,讲师,本科,主要研究方 向: 机电一体化技术。
3.4 系统的频域分析[5]
频域分析法是工程上广泛采用的系统分析与综合方法,系统 的频率特性可用图形表示,有奈奎斯特 (Nyquist) 曲线和对数频
3、 图6的时域、 频域响应曲线可以判定系统是稳定的,用不同的 方法对同一个系统进行分析其结论是一致的。
G G
i
图1 双闭环调速系统原理框图 在给出的控制系统中,电流和速度调节器均由 PI 控制器实 现。电流调节器用来调节电枢电流,
(s ) =
K K
i
其数学模型为
i
n
分别为 F
(s ) =
n
Tis + 1 s Tns + 1 s
τ
i
;速度调节器用来调节转速, 其数学模型为 。 电流反馈环节和速度变换环节的数学模型 ,
4 结束语
基于 MATLAB 软件的系统仿真与传统的设计分析方法相比 参数调整简单方便,而且其友好的图形用户界面,便于根据仿真结 果观察系统特性,可广泛应用于教学及工程设计中。
σ % 减小,调整时间 t S 缩短,平稳性和快速性得到明显改善。 可
见,调节器参数的变化直接影响着系统的性能,通过仿真的方式可 以有效地进行控制器设计,为设计具有较佳性能的系统提供方便。
图4 负载变化的双环直流电动机控制仿真框图 图2 双闭环调速系统的仿真模型
3.3 系统抗负载扰动的能力
在实际工作中,系统中的负载有可能发生变化,那么系统的抗负 载扰动能力可以通过仿真做以研究。 用一个阶跃环节来表示负载扰 动,得出如图4所示的仿真框图。 设负载扰动的阶跃时刻为6s,初值为 1N・m,终止值分别为 15 N・m 和 50 N・m,即表示负载在 t = 6s 时 刻由1加至15或50,这样可以分别得出如图5 (a) 、 (b) 所示的仿真 结果。 可见,在给定的PI控制器的控制下,即使负载有较大的变化,仍 能很快回复到额定转速,系统抗负载扰动的效果是很理想的。
从仿真结果可以看出,启动过程的第一阶段是电流上升阶段, 突加给定电压,ASR的输入很大,其输出很快达到限幅值,电流也很 快上升,接近其最大值。 第二阶段,ASR饱和,转速环相当于开环状 态,系统表现为恒值电流给定作用下的电流调节系统,电流基本上
3 仿真实例
使用 MATLAB 进行仿真和系统控制时, 可以应用 M A T L A B 提供的动态仿真工具Simulink组件
3.1 系统的动态响应
从Simulink模块库窗口创建系统模型如图2所示,选信号源 模块组中的阶跃信号模块为输入信号,以输出模块组中的示波器 作为显示器来观察系统阶跃响应。 在模型窗口设置传递函数模块 的参数和特性,采用Simulink对整个系统进行仿真,则得到电动 机的转速和电流的阶跃响应曲线,如图 3(a)所示。
参考文献:
[1] 李惠升. 电梯控制技术[ M ] . 机械工业出版社. 2 0 0 3 . 7 [ 2 ] 叶安丽. V V V F 电梯及其速度控制[ J ] . 北京建筑工程学院 学报,1997,13(2):90-95 [3] 彭克荣.电梯技术的现状及发展趋势[J].建筑机械化,1996 (5) [ 4 ] 白建社.电梯系统控制器设计及 S 曲线优化研究(D) 2000.3 [ 5 ] 赵静,葛斌. 电梯运行速度曲线的算法与仿真[ J ] . 大连大 学学报,1997.(12) [ 6 ] Y A NG HUAYONG, YANG JIAN, XU BING. Computa- tional Simulation and Experimental Research on Speed Control of VVVF Hydra Elevator[J], Control Engineering Practice, 12(2204):563-568
电气传动
Electrical Drives
《 自 动 化 技 术 与 应 用 》2 0 0 7 年 第 2 6 卷 第 1 1 期
基于 MATLAB 的直流电动机双闭环调速 系统的仿真研究
李 琳
(武夷学院 福建 武夷山 354300)
摘 要:本文介绍了利用 MATLAB 软件中的 Simulink 组件对直流电动机双闭环调速系统进行仿真,获得了反映系统性能的曲线,并 对仿真结果进行了比较分析。结果表明, 应用 M A T L A B 进行系统仿真具有方便、高效及可靠性高等优点。 关键词:MATLAB; 直流电动机; 双闭环调速系统; 仿真 中图分类号:TP276 文献标识码: B 文章编号:1003 - 7241(2007)11-0073-03
统的仿真模型,晶闸管整流电路可以由SimPowerSystems模块集 中的电力电子模块库PowerElectronics中的Thyristor来实现;直 流电动机可以采用SimPowerSystems中的电机模块,这些模块封 装了电机的电气与机械方程,在模块给定了参数后就可以直接模 拟实际电机的工作状态;测速发电机、 励磁系统和电动机均可由 电气系统模块集中的 DC Machine 模块实现。 设某电动机铭牌参数为: 额定电压 U N = 2 2 0 V , 额定电流 IN =136A,额定转速为 nN =1500rpm,K e =0.228V/rpm,λ =1.5,晶 闸管装置的放大倍数为Ks=62.5,电枢回路总电阻Ra=0.863Ω,电 流反馈系数β =0.028V/A,转速反馈系数α =0.0041V/rpm,反馈 环节时间常数τ i = τ n =0.005s,已知两个调节器参数分别为 Ki=1.15,Ti=0.028s,Kn=20.12,Tn=0.092s。文章从以下几个方面 对双闭环调速系统进行仿真分析:
Techniques of Automation & Applications | 73
《 自 动 化 技 术 与 应 用 》2 0 0 7 年 第 2 6 卷 第 1 1 期
电气传动
Electrical Drives
别提供了晶闸管模块、 触发模块、 及电机模块库,可以通过这些 现成的模块库搭建出精确的仿真模型,进而对双闭环调速系统进 行精确的仿真分析。
图4 正弦电梯速度曲线仿真框图 SDCS 速度控制是利用速度曲线的时间—距离关系, 由剩余 距离值经迭代运算反求出对应于距离的时间值, 再由时间—速度 的关系计算出速度值来达到实时速度控制的目的。本文利用 BP302的虚拟井道技术模拟电梯的实际运行。 系统仿真框图如图 4 所示。图中绝对剩余距离速度控制模块即 SDCS 模块。它是电 梯正弦速度曲线生成的关键模块。 图中主控制器即BP302电梯控 制系统, 在仿真中主要利用其软件井道技术获得电梯模拟运行和 通过其获得轿厢的绝对位置。 经过实验测得在干扰较少的环境下 电梯的速度运行曲线图如图 5, 其结果是今人满意的。 (上接第 74 页)
vi = ( Aπ − 2) + ( A π − 2 ) 2 + 4 LA ω 2
5 实验仿真[5]
实验设备包括 : 电梯微控制器bp302 ; 科比变频器F4 ; 绝对值编码 器 AWG-05 与增量编码器各一个;电动机;SDCS 速度控制模块等设备。
图5 正弦电梯速度曲线仿真
6 结束语
本文着重介绍了正弦电梯速度曲线的设计方法,并用电梯轿厢 的绝对位置计算出剩余距离的方法对电梯运行速度曲线进行仿真。 经过实测仿真, 表明了此种方法能大幅度提高电梯的运行效率和舒 适性。 考虑到电梯市场的飞速发展, 其应用前景是十分可观的。
1 引言
有些调速系统,如龙门刨床、 轧钢机等经常处于正反转状态, 为了提高生产效率和加工质量,要求尽量缩短过渡过程的时间。 速度和电流双闭环直流调速系统 (简称双闭环调速系统) 是由电 流和转速两个调节器进行综合调节的,可获得良好的静、 动态性 能。 由于这样的系统其转速和电流响应曲线很难精确绘制,不便 于对系统特性的分析和理解。 本文通过一个直流电动机双闭环调 速系统实例,就如何利用 MATLAB 软件的仿真功能对系统进行分 析做一些探讨,对系统的设计和改进具有一定的参考意义。