基于单片机的无线遥控移动机器人
基于单片机的电器遥控器的设计

摘要本文介绍了单片机电器遥控器的基本原理以及工作流程,主要采用最高科技的单片机技术来实现遥控的目的。
该设计主要采用了红外发射模块和红外接收模块,然后分别对这两个程序模块进行编程。
具体说明了单片机在电器遥控器中的作用。
单片机涉及到了电器遥控器工作的绝大部分过程。
从电器遥控器的发展趋势来看,单片机的出现给了电器遥控器更大的优势,促进了新一代电器遥控器的发展。
将单片机融入到电器遥控器中,使电器遥控器的使用更加的方便,快捷,也将人们的生活简易化。
随着时代的进步,人们对生活物品的要求也越来越高,为了满足消费者的需求,所以将先进的单片机加入到家庭中的电器遥控器中是符合大众要求的。
通过对设计要求地认真分析和研究,拿出了几种可行方案,最终选定了一个最佳方案。
该方案是采用先进的单片机技术实现遥控的主要手段。
我们所设计的遥控器能控制5个电器的电源开关,并且可对一路电灯进行亮度的调节。
关键字:遥控电路,红外发射,红外接收,单片机ABSTRACTThis paper introduces the microcomputer electric appliance remote control principle and working process, mainly uses the highest technology, microprocessor technology to achieve the purpose of remote control. Design mainly adopts the infrared emitting module and the infrared receiving module, and then each of the two modules are programmed. Specify the SCM in electrical remote control in rats. SCM relates to the electric appliance remote control most of the course work. From the view of the development tendency of remote controller for electric appliances, the appearance of single chip microcomputer for electrical remote control of greater advantage, promote a new generation of electric appliance remote control development. The single chip integrated into the electrical remote control, so that the electric appliance remote control the use of more convenient, fast, also be people life simple. With the progress of the times, people living on items are increasingly high requirements, in order to meet the needs of consumers, so the advanced SCM to join the family electric appliance remote controller is in line with the needs of the public. After analyzing and researching on the request of the design, we take several blue print and we selected the best one in the end. The project make use of advanced SCM to realize the remote control. Remote controller we designed can dominate 5 electrical source switches and adjust the brightness of one light.Key Word :Remote controlling circuit Infrared emission Infrared receiving, SCM目录1.文献综述 (5)1.1红外遥控的功能与特点 (5)1.2红外遥控的发展过程 (5)1.3红外遥控的发展趋势 (6)2. 总体设计方案 (7)2.1方案一:(简易红外遥控电路) (7)2.2方案二:(利用红外遥控开关电路) (8)2.3方案三:利用红外遥控开关电路 (8)2.4方案比较 (9)3.系统硬件电路设计 (9)3.1.红外遥控电路设计 (9)3.1.1 发射电路部分 (9)㈠器件选择 (9)㈡电路设计 (11)3.1.2接收电路部分 (12)㈠器件选择 (12)㈡红外遥控接收器的接收过程 (13)㈢电路设计 (14)3.2.系统功能实现方法 (16)3.2.1.遥控码的编码格式 (16)3.2.2.遥控码的发设定遥控射 (16)3.2.3.数据帧的接收处理 (17)3.3.遥控发射及接收控制程序流程图: (17)3.3.1遥控发射部分: (17)3.3.2遥控接收部分: (19)4. 系统调试 (20)5. 结束语 (22)6.参考文献 (22)7.附录程序清单 (23)1. 文献综述1.1红外遥控的功能与特点红外遥控技术是一种利用红外线进行点对点通信的技术,其相应的软件和硬件技术都已比较成熟。
遥操作机器人

遥操作机器人引言遥操作机器人是一种具有遥控功能的机器人系统。
它允许人们通过遥控器、计算机或移动设备控制机器人的运动和执行任务。
这种机器人系统广泛应用于各种领域,如工业、医疗、教育和娱乐等。
本文将介绍遥操作机器人的工作原理、应用领域以及未来发展趋势。
工作原理遥操作机器人的工作原理可以简单分为三个主要步骤:传感器感知、信号传输和操作执行。
首先,机器人通过内置的传感器系统感知周围环境。
这些传感器可以包括摄像头、触摸传感器、声音传感器和距离传感器等。
通过这些传感器,机器人可以获取周围环境的图像、声音和其他感知信息。
其次,感知到的信息通过无线信号传输到遥控设备,如遥控器、计算机或移动设备。
这些设备通常与机器人通过无线网络或蓝牙进行通信。
通过这种信号传输,人们可以实时接收到机器人感知到的信息。
最后,遥操作设备通过软件或硬件界面向机器人发送指令,控制机器人的运动和执行任务。
这些指令可以包括前进、后退、左转、右转等基本运动命令,以及抓取、放置、扫地等复杂任务命令。
应用领域遥操作机器人在各个领域都有广泛的应用。
工业领域在工业领域,遥操作机器人被广泛应用于危险环境和高风险作业。
例如,在石油和天然气行业,遥操作机器人可以在油井或管道中进行检查和维修工作,减少了工人的安全风险。
此外,遥操作机器人还可以应用于汽车制造、飞机维修和核能工业等领域,提高生产效率和减少人力成本。
医疗领域在医疗领域,遥操作机器人可以被用于手术操作。
通过遥控设备,医生可以在远程控制下操作机器人进行手术。
这种遥操作手术系统可以实现高精度、微创和稳定的手术操作,减少了患者的创伤和恢复时间。
教育领域在教育领域,遥操作机器人可以用于远程教育和实验。
学生可以通过遥控设备与机器人进行互动,学习机器人技术和编程知识。
此外,遥操作机器人还可以帮助教师进行远程实验和演示,扩展教育资源和提高教学效果。
娱乐领域在娱乐领域,遥操作机器人被广泛应用于无人机和机器人比赛。
通过遥控设备,参与者可以操作机器人进行竞技和娱乐活动。
基于STC89C52单片机智能小车设计

基于STC89C52单片机智能小车设计一、本文概述随着科技的飞速发展,智能化、自动化已经成为现代社会发展的重要趋势。
在这一背景下,智能小车作为一种集成了控制、传感器、通信等多种技术的智能移动平台,受到了广泛的关注和研究。
本文将以STC89C52单片机为核心,探讨智能小车的设计方案,包括硬件电路的设计、控制算法的实现以及实际应用的展望。
STC89C52单片机作为一款常用的8位微控制器,具有高性价比、稳定可靠、易于编程等优点,在智能小车的设计中发挥着关键的作用。
通过合理的硬件电路设计,可以实现小车的运动控制、传感器数据采集、无线通信等功能。
同时,结合相应的控制算法,可以使小车具备自主导航、避障、路径规划等智能行为。
本文将从硬件和软件两个方面详细介绍智能小车的设计过程。
硬件方面,将重点介绍STC89C52单片机的选型、外围电路的设计以及传感器的选型与连接。
软件方面,将详细介绍小车的控制算法,包括运动控制算法、传感器数据处理算法以及无线通信协议的实现。
本文还将对智能小车的实际应用进行展望,探讨其在智能家居、工业自动化、教育娱乐等领域的应用前景。
通过本文的阐述,旨在为读者提供一个基于STC89C52单片机的智能小车设计思路和方法,为其后续的研究和开发提供参考和借鉴。
二、智能小车硬件设计智能小车的硬件设计是整个项目的基础,其设计的好坏直接影响到小车的性能和稳定性。
在本设计中,我们选择了STC89C52单片机作为小车的核心控制器,它是一款高性能、低功耗的8位CMOS微控制器,具有强大的数据处理能力和丰富的外设接口,非常适合用于智能小车的控制。
电源模块:为了提供稳定的工作电压,我们选择了LM7805三端稳压芯片来构建小车的电源模块,该芯片可以将输入的不稳定电压稳定输出为5V,为单片机和其他模块提供稳定的电源。
电机驱动模块:小车的运动需要靠电机来驱动,我们选择了两款直流电机,通过电机驱动板(如L298N)来控制电机的正反转和转速,从而控制小车的行驶方向和速度。
基于树莓派的无线遥控移动机器人设计及运动控制
基于树莓派的无线遥控移动机器人设计及运动控制作者:杨丛丛吴涛张安峰江山强来源:《软件》2020年第02期摘 ;要:本文设计并开发了一种基于树莓派的无线遥控移动机器人,机器人使用手机作为控制端,控制系统以树莓派作为核心控制器,采用Python语言进行程序开发,机器人拥有小车底盘、电机驱动、机械臂、舵机驱动和超声波测距等多个功能模块。
系统通过Wi-Fi实现了机器人与手机之间的信息交互,操作者可以无线远程遥控来实现机器人的移动、避障和物体抓取。
关键词:;树莓派;机械臂;电机驱动;超声波测距;舵机驱动中图分类号: TP242.6;;;;文献标识码:;A;;;;DOI:10.3969/j.issn.1003-6970.2020.02.021【Abstract】: This paper designs and develops a wireless remote control mobile robot based on Raspberry Pi. The robot uses the mobile phone as the control terminal. The control system uses the Raspberry Pi as the core controller. The program is developed in Python language. The robot is composed of several functional modules such as car chassis, motor drive, manipulator, steering gear drive and ultrasonic ranging. the system realizes the information interaction between the robot and the mobile phone through Wi-Fi, and the operator can wirelessly remotely control the robot to move, avoid obstacles and grasp objects.【Key words】: Raspberry Pi; Robotic arm; Motor-drive; Ultrasonic ranging; Servo-drive0;;引言隨着计算机科学与网络技术的不断创新,为智能机器人技术的发展带来了新的发展机遇,各种机器人在不同的领域发挥着越来越重要的作用[1]。
基于嵌入式的智能移动机械手臂

基 于 嵌 民族 大学电 气工程 学院 刘萧键 李 明结 李金 鹏 张 国恒
【摘 要 】智 能 移动 机械 手臂 是 以单 片机 为核 心 ,以舵 机 、电机 、履带 、摄 像 头 、wif i模块 为外部 固件 采 用下半 部分 为履 带 小车 和上 半部 分 为机 械手 臂作 为基 本构 架, 以直流 电机 作 为小 车前进 的 动 力使 小车到 达指 定 的任务 地 点并 完成 的一 系列 动作 , 完成对 作业现 场或 自然 灾害现 场 的摄 像 和作 业 、控制 模 块主要 是 通过遥 控 装置控 制 小 车的前 、后 、左 、右的 行驶 ,通过 摄像 头把 接 收到 的视 频数 据传输 给 单 片机然后 进 行 数 据 处理 并把 采集 到 的视频 显 示在 显示屏 上 它具有 环境 适应 能 力强 、体积 小 、行动 方便 、质 量 轻 ,成本较 低等 优 点 【关键 词 】机 械手 臂 ; 图像 传输 ;无线控 制
数据 处理 速度 快 ,功 耗低满 足 , 数据采 集传 输模 块 采用 摄像 头无 线 收发 装置 使  ̄WiFi模 块 ,移 动控 制终端 采 用手 机 ,被控 制端 为舵 机 组成 的机械 臂 和履 带 电机组 成的 乍底 琏模块 结 构 图如 图2。
环羹神 据羹莱星集 像 I—壁 —墨·量 l W—IF —I 7[臻 图像数据 一
件 ,观察 荷通 过软 件 使用 移动 终端 的重 力感 应 系统 控制 智能 探测 机 器人 的前后 移动 和 转 向 也¨丁以于 动 操作 ,实 时返 回 移动 后的环 境 数 据 和 图像从 而使 人 能更加 方便 的使 片j和 操作 。
2 硬 件 的 设 计 与 实 现
基于PWM信号遥控机器人的设计与制作

由 航 模 遥 控 器 控 制 舵 机 转 动 从 而 驱 动 小 轮
个 放 电 晶 体 管 和 一 个 由 3只 电 阻 组 成 的 分 压 器 , 只 电 阻 R1 R2 R3 为 5 o 。 3 、 、 均 K 遥 控 发 射 电 路 。 5 成 块 与 R 1 R2、 5 集 5 、
7 H C2 4各 缓 冲 器 处 于 高 阻 态 , 正 实 现 4 4 真 在 线编 程 功 能 。
成 超再 生检 波 器 , 出原 方 波 调 制 信 号 。 检 由
Cl R7 至 I 2、 加 C2的 引 脚 进 行 放 大 , 大 后 放
3. 舵 机控 制 电路 3
在 遥 控 机 器 人 机 电 控 制 系 统 中 , 机 舵 控 制 效 果 决 定 机 器 人 整 体 性 能 。 机 是 一 舵
出 5 Hz 波 信 号 。 0 方 VT1 外 围 元 件 构 成 晶 及 体 稳 频 电 容 三 点 式 振 荡 器 , 英 晶 体 的 谐 石 振 频 率 选 用2 1 5 , 7. Hz VT1 荡 产 生 的 高 4 震
通 过 无 线 遥 控 接 通 语 音 模 块 电 源 并 按 预 先
的 信 号 经 VD3、 VD4 压 整 流 , 倍 由VT3 出 输
平 滑 的 直 流 电 压 。 电 压 的 大 小 与 发 送 的 该 不 同 占 空 比 信 号 波 形 有 关 , 空 比 大 , 压 占 电 高 , R 1 为 VT4 供 的 偏 执 电 流 大 , 机 经 l 提 电 的 转 速 高 ; 空 比 小 , 压 低 , R1 为 VT4 占 电 经 1 提 供 的 偏 执 电 流 小 , 机 转 速 慢 。 占 空 比 电 当 足够小时, VT3 止 无 输 出 , 截 VT4 失 去 偏 因 置而不导通 , 机停转。 电
51单片机-毕业设计基于单片机设计的红外线遥控器
ping primary school fire safety systems to e nha nce fire safety, prote ction of public property and t he life and property safety of teacher s and students, school fire safety into day-to-day ma nagement, is devel opi ng the following fire safety system. 1, strengt hen fire safety educati on of the whole school. Accordi ng to the re quireme nts of the Fire S ervices A ct, so t hat everyone has of keeping fire control safety, pr otecting fire control facilities, fire preve ntion, reports of fire学生毕业设计(论文)报告系别:专业:班号:学生姓名:学生学号:设计(论文)题目:基于单片机设计的红外线遥控器指导教师:设计地点:起迄日期:ping primary school fire safety systems to e nha nce fire safety, prote ction of public property and t he life and property safety of teacher s and students, school fire safety into day-to-day ma nagement, is devel opi ng the following fire safety system. 1, strengt hen fire safety educati on of the whole school. Accordi ng to the re quireme nts of the Fire S ervices A ct, so t hat everyone has of keeping fire control safety, pr otecting fire control facilities, fire preve ntion, reports of fire常州信息职业技术学院电子与电气工程学院毕业设计论文毕业设计(论文)任务书专业电子信息工程班级电子085 姓名傅浩一、课题名称:基于单片机设计的红外线遥控器二、主要技术指标:1.遥控距离:0~10m2.额定工作电压:直流3V(普通5号干电池2节);红外光平均辐照度≥40μW/cm2;指向性(辐照度为20μW/cm2)≥30度3.欠压条件下(直流2.4v):红外光平均辐照度≥20μW/cm2,指向性(辐照度为10μW/cm2)≥30度三、工作内容和要求:1.以AT89C2051单片机作为核心,综合应用了单片机中断系统、定时器、计数器等知识,应用红外光的优点2.遥控发射器通过对红外光发射频率的控制来区别不同的操作3.遥控接收器通过对红外光接收频率的识别,判断出控制操作,来完成整个红外遥控发射、接收过程四、主要参考文献:[1] 梅丽凤,王艳秋,张军等. 单片机原理及接口技术,北京:清华大学出版社,2004年.[2] 戴峻峰,付丽辉. 多功能红外线遥控器的设计,传感器世界.2002,8(12):16~18.[3] 李光飞,楼然苗,胡佳文等. 单片机课程设计实例指导,北京:北京航空航天出版社,2004年.[4] 苏长赞. 红外线与超声波遥控,北京:人民邮电出版社.1995年.学生(签名)2010 年 5 月7 日指导教师(签名)2010 年5 月10 日教研室主任(签名)2010 年5 月10 日系主任(签名)2010 年5 月12 日ping primary school fire safety systems to e nha nce fire safety, prote ction of public property and t he life and property safety of teacher s and students, school fire safety into day-to-day ma nagement, is devel opi ng the following fire safety system. 1, strengt hen fire safety educati on of the whole school. Accordi ng to the re quireme nts of the Fire S ervices A ct, so t hat everyone has of keeping fire control safety, pr otecting fire control facilities, fire preve ntion, reports of fire毕业设计(论文)开题报告设计(论文)题目基于单片机设计的红外线遥控器一、选题的背景和意义:随着社会的发展、科技的进步以及人们生活水平的逐步提高,各种方便于生活的遥控系统开始进入了人们的生活。
机器人遥控操作技术的工作原理

机器人遥控操作技术的工作原理机器人遥控操作技术的工作原理随着科技的飞速发展,机器人逐渐成为现代生产中必不可少的一部分。
机器人的应用范围越来越广,从工厂制造到科研探索,从医疗行业到家庭服务,无处不在。
而机器人作为一种自动化设备,需要通过遥控进行操作。
机器人遥控操作技术是机器人运转的关键所在,它的工作原理是需要我们探究的。
机器人遥控操作技术是通过无线信号或有线信号实现机器人的遥控操作,在其中包含了信号传输和接收、操作指令传递等内容。
它的工作原理主要分为以下几个方面:一、信号传输遥控器通过按键操作,产生信号,然后将信号通过无线或有线传输技术传到机器人中央处理器,从而实现机器人的操作。
在无线传输方面,常用的技术有蓝牙、Wi-Fi、红外线等;而在有线传输方面,则主要采用USB、串口等技术。
其中,蓝牙技术是比较常用的一种无线传输技术,它的优点在于传输距离较远,且传输速度较快,适用于远距离和高速的应用场景;而Wi-Fi技术则适用于需要高速稳定传输的场合。
串口则是比较常用的有线传输技术,它可实现高达115200bps的传输速率,且传输稳定,适用于一些精确度要求高的应用场合。
无论何种技术,信号传输的核心都是将遥控器中产生的信号传输到机器人的接收端。
二、信号接收机器人接收端接收到传输来的遥控信号,然后进行解码处理,将指定的操作指令传送到机器人中央处理器进行处理。
在接收端,常见的技术有无线接收模块、有线接收模块等。
无线接收模块通常是由接收天线、解码芯片、中间件、调制解调器等组成。
它的工作原理是将传输过来的信号进行解调、放大、滤波等处理,然后将信号送入解码芯片,将信号转为数字信号,最终将操作指令通过中间件传输到机器人中央处理器。
有线接收模块则是通过传输线接收信号,然后通过相应的解码芯片将信号转化为操作指令。
接收端的工作是将传输过来的信号进行解析和转化,最终传送到机器人中央处理器。
三、操作指令处理机器人中央处理器收到来自遥控器的信号,判断其中包含的操作指令,然后执行相应的操作。
基于PWM信号遥控机器人的设计与制作_张晴

数字技术与应用?应用研究?基于PWM信号遥控机器人的设计与制作张晴袁晓梅罗凯(徐州空军学院航空弹药系江苏徐州 221000)摘要:本文介绍一款遥控机器人,以ATmega16单片机为核心控制器,用航模遥控器驱动MG945舵机工作,控制机器人的运动。
该机器人具有可无线遥控、垂直升降、自主语音讲解等功能。
本系统采用模块化设计思想,软件用C语言编写。
关键词:ATmega16单片机航模遥控器 MG945舵机中图分类号:TP242文献标识码:A文章编号:1007-9416(2010)10-0080-011 设计任务和要求以ATmega16单片机为核心,制作一款遥控机器人,机器人具有可无线遥控、垂直升降、自主语音讲解等功能。
无线遥控时,由航模遥控器控制舵机转动从而驱动小轮胎,推进机器人运动;垂直升降时,遥控器控制电机工作,带动旋翼旋转以完成垂直方向的工作任务;自主语音讲解时机器人通过无线遥控接通语音模块电源并按预先设计好的语音文件做讲解。
个放电晶体管和一个由3只电阻组成的分压器,3只电阻R1、R2、R3均为5KΩ。
遥控发射电路。
555集成块与R1、R2、RP1、VD1、VD2及C1组成一个无稳态、大范围、可变占空比振荡器。
通过RP1阻值的调节,占空比的变化范围可达到1%—99%,输出50Hz方波信号。
VT1及外围元件构成晶体稳频电容三点式振荡器,石英晶体的谐振频率选用27.145Hz,VT1震荡产生的高频载波经555电路方波信号调制,由天线发射出去。
本电路采用石英晶体稳频,故工作可靠。
接收驱动电路。
由VT2及其外围元件构成超再生检波器,检出原方波调制信号。
由C12、R7加至IC2的引脚进行放大,放大后的信号经VD3、VD4倍压整流,由VT3输出平滑的直流电压。
该电压的大小与发送的不同占空比信号波形有关,占空比大,电压高,经R11为VT4提供的偏执电流大,电机的转速高;占空比小,电压低,经R11为VT4提供的偏执电流小,电机转速慢。
基于单片机STC89C52控制的智能小车

基于单片机STC89C52控制的智能小车摘要:该毕业设计是采用无线遥控基于单片机的功能实现的,当无线遥控器的某个按键按下时,无线发射器将按键信号以编码的形式在315MHz的频率上发射出去,无线接收器接收并放大发射信号同时解调出TTL电平信号送至单片机进行处理,单片机通过比较和识别接收来的无线遥控编码便可执行相应的遥控功能,从而实现智能小车的前进、后退、左转和右转的基本功能和伴随音乐演奏而闪烁的LED的开启与关闭的功能。
此外,我加入了温度传感器与时钟芯片,让它们在液晶显示器上显示其室温和时间,并用按钮进行时间的调控。
由于无线遥控模块是四路单向锁存模块,只能单线实现四个功能,所以发射模块的控制按键不够,根据需要,我仅仅用无线模块控制小车的前进和后退,停止,其它的采用按键调试,用按键来实现小车的前进/后退/左转/右转/音乐/时间调控等功能。
关键词:无线模块;液晶显示模块;电机驱动模块;音乐;智能小车目录引言................................................................3 1 整体方案设计....................................................4 1.1 整体方案设计的思路..............................................41.2 整体方案的流程图................................................42 避障遥控小车系统概况............................................4 2.1 SC2272无线遥控模块原理..........................................4 2.2 驱动原理的简介..................................................62.3 直流电机简介....................................................93 模块方案比较与论证.............................................12 3.1 车体设计.......................................................12 3.2 电机模块的选择.................................................12 3.3 电机驱动模块的选择.............................................123.4 控制器模块的选择...............................................134 系统硬件电路设计...............................................14 4.1 无线模块的设计.................................................144.2 直流电机的驱动模块.............................................155 软件的简单介绍.................................................16 5.1 KEIL的简介....................................................165.2 PROTUES的简介.................................................165.3 STC_ISP_V480的简介.............................................17 参考文献..........................................................18 附录一:实物图....................................................19 附录三:总程序.....................................................22引言随科学技术的进步,智能化和自动化技术越来越普及,也广泛应用于机器人玩具制造领域,使智能机器人越来越多样化。
移动机器人的Android远程控制终端软件设计
在本设计中采用 Wi 通信实现控制终端与移动机器人进行通 - F i 信, 具有两个优势: 其一, 通信范围广, 对墙的穿透能力 Wi - F i 强, 这不仅可以进行较长距离的通信, 为系统所需要的远程监测 和控制提供条件, 而且可以对机器人进行特殊控制, 例如在救援 现场的操作人员远程控制位于建筑物内的机器人; 其二, 大部分 模块,且 A 智能移动终端均配有 Wi - F i n d r o i d的系统均支持基 于 Wi 的通讯功能。 - F i
2 软件总体设计 机器人” , 是基于 L 平台的开源手机操 A n d r o i d本义指“ i n u x 作系统, 其底层 L 内核只提供基本功能, 其他的 应 用 软 件 则 i n u x 由各公司自行开发, 大部分程序以 J a v a语 言 编 写 。 A n d r o i d操 作系统的底层建立在 L 系统之上,其系统架 构 采 用 分 层 架 i n u x 构的思想, 架构清晰, 层次分明, 协同工作。 自上而下分为 4个层 次: 应用程序层、 应用程序框架 、 函数库和 A n d r o i d运 行 时 , L i n 内核。由于 A 很多制造商都在生产 u x n d r o i d系统的开源 特 性 , 如: 摩托罗拉、 三星、 、 索爱、 华为、 A n d r o i d系统的设器人的 A n d r o i d远程控制终端软件设计
移动机器人的 A n d r o i d远程控制终端软件设计
S o f t w a r eD e s i g no f R e mo t eC o n t r o l B a s e do nA n d r o i df o rMo b i l eR o b o t
1 系统体系架构
基于单片机的智能遥控器设计
基于单片机的智能遥控器设计【摘要】本文旨在探讨基于单片机的智能遥控器设计。
在将介绍研究背景、研究意义和研究目的。
接着,将详细阐述基于单片机的智能遥控器设计原理、硬件设计和软件设计。
在实验验证部分,将介绍实验验证的过程和结果。
随后,将进行基于单片机的智能遥控器性能分析。
将在结论部分总结本文的研究成果并展望未来的研究方向。
通过本文的研究,可以为智能遥控器设计提供重要参考,为相关领域的研究和应用提供新的思路和方法。
【关键词】基于单片机、智能遥控器设计、硬件设计、软件设计、实验验证、性能分析、总结、展望、研究背景、研究意义、研究目的。
1. 引言1.1 研究背景智能遥控器是一种可以通过无线方式控制各种设备的智能装置,它可以帮助人们更方便、更智能地控制家用电器、机器人、无人机等设备。
随着科技的不断发展,智能遥控器在生活中的应用越来越广泛,给人们的生活带来了极大的便利。
在过去的几年里,随着单片机技术的不断进步和成熟,基于单片机的智能遥控器设计也得到了更深入的研究和应用。
单片机具有体积小、功耗低、成本低等特点,适合用于智能遥控器的设计。
通过单片机可以实现更复杂的控制逻辑和功能,同时还可以提高智能遥控器的稳定性和可靠性。
目前对于基于单片机的智能遥控器设计还存在一些问题和挑战,如如何提高遥控器的响应速度、如何提高遥控器的传输距离等。
深入研究基于单片机的智能遥控器设计具有重要的理论和实际意义,可以为智能遥控器的进一步发展提供有益的参考和指导。
1.2 研究意义智能遥控器是一种可以通过无线信号控制各种家用电器或设备的智能化产品。
随着科技的不断发展,智能遥控器在日常生活中的应用越来越广泛,给人们的生活带来了极大的便利。
基于单片机的智能遥控器设计具有重要的研究意义。
通过研究基于单片机的智能遥控器设计,可以进一步提高智能遥控器的性能和稳定性,为用户提供更加便捷、高效的控制体验。
基于单片机的智能遥控器设计可以为智能家居系统提供更加完善的控制手段,实现家居设备的智能化管理,提升家居生活的舒适度和便利性。
基于单片机的无线遥控移动机器人

基于单片机的无线遥控移动机器人作者:臧莹来源:《科技风》2018年第23期摘要:随着我国科学技术的不断向前发展,很多的机器人在人们的日常生活中开始扮演重要的角色。
单片机机器人也开始走向人们的生活中,就目前为止,单片机机器已经在智能家电、精密仪器以及复杂的控制领域起到了非常重要的作用。
本文针对单片机的无线遥控的移动机器人进行了非常深入的分析。
关键词:单片机;无线遥控;机器人;移动单片机机器人已经开始走进人们的生活,在单片机机器人运行过程中需要有精确的数据传输,数据接收以及行动,需要我们不断的去探索和发现。
一、单片机的遥控机器人的发展现状单片机的无线遥控移动机器在目前已经得到了较好的发展,单片机无线遥控移动机器人中,各个数据模块已经发展的较为成熟,机器人能完整的完成有目标的移动、进行功能性的作业,并且在进行开发的过程中成本已经打大幅度的下降。
在未来将会有较好的发展。
二、单片机无线遥控移动机器人的组成及原理在单片机的无线遥控的机器中,主要的组成设备分为两个重要的大部分,第一部分为单片机机器人的遥控设备,另一部分为单片机机器人的机器人体部分。
在遥控的设备中,有分为单片机模块,遥控的手柄键盘部分。
仪器的供电电路部分和晶振电路以及设备的复位电路。
在遥控的机器人的部分分为车体的单片机模块以及机器内部的电子指南针的模块以及机器人的超声波测距模式,供电电路以及机器人运行的行动模块,和机器内部的测距模式。
下面将对于机器人内部的各项模块进行分析和阐述。
(一)机器人内部的无线接收装置在普通的单片机中,对于机器内部的无线接收模块一般会选择APC220模块进行。
在这个模块中,主要采用的无线的接受和采用的装置为半双工通信方式进行指令的传输,在传输的信号中包含机器人的机械动作和移动坐标。
在进行数据的传输的过程中所采用的为9600波特率进行数据的传输,来保证数据传输过程中的稳定性。
在对于此模块进行供电时,一般会采用3.6v的电压进行供电,在使用的过程中对于电量的消耗较低。
可以做老婆的美女机器人,你知道怎么操控吗?
可以做⽼婆的美⼥机器⼈,你知道怎么操控吗?◆触摸屏操控⽅式这种操控⽅式最为成熟,也最有效,被⼤多数家⽤机器⼈所应⽤。
优点:触摸屏操控可以实时传递指令信息,⽽且机器⼈接收指令以及反应的速度也很快。
与其他操控⽅式相⽐,对周围电磁、温度、噪声等的反应⽐较⼩。
缺点:缺乏灵活性,使⽤者只能靠近机器⼈进⾏操作,这就使得机器⼈原本的优点黯然失⾊。
◆基于GSM/GPRS⽹络的远程操控这是⽬前⽐较先进的⼀种机器⼈操控⽅式。
优点:机器⼈设备简单、实⽤,可靠性⾼,⽤户不需要靠近机器⼈,只要利⽤GSM/GPRS⽹络就可以对家⽤机器⼈进⾏远程操控和监测。
★缺点:该操控系统的构建系统⽐较复杂,对移动通信⽹络的依赖性太强,使⽤和维护的成本较⾼,⽽且因为受到GSM/GPRS⽹络的带宽限制,使得家⽤机器⼈不能执⾏对带宽要求较⾼的业务,⽐如视频传输等。
◆基于Internet的PC机遥控操控该种操控技术是机器⼈技术研究中的⼀个重点项⽬,⽬前还未投⼊使⽤。
优点:基于Internet的机器⼈遥控操控不受距离的限制,只要是连接Internet的电脑就可以对机器⼈进⾏远程操控。
缺点:容易受到⽹络通信宽带的限制,⽽且由于该操作系统应⽤的前提是有Intemet,因此,TCP/IP系统所导致的延时也能够影响到该操控系统。
◆基于WiFi⽆线⽹络的PC机操控利⽤WiFi⽆线⽹络在电脑上对家⽤机器⼈进⾏操控也是⼀种⽐较常⽤的操控⽅式,加拿⼤DrRobt和美国iRobot等公司⽣产的家⽤机器⼈都应⽤了这⼀种操控系统。
优点:操作系统简单、价格便宜、推⼴便利。
缺点:PC机携带不⽅便,没有充分利⽤⽆线⽹络以及移动机器⼈的优势,在家⽤机器⼈的操控⽅式中缺乏优势。
◆红外线遥控优点:该种操作⽅式通⽤性强,在操控家⽤机器⼈的同时,还可以操控其他家⽤电器。
缺点:稳定性差,容易受到磁场、温度、湿度等因素的影响,可遥控的距离有限,带宽窄、传输慢等。
◆语⾳控制语⾳控制是⼀种最具研究潜⼒的控制⽅式。
远程遥控机器人设计与实现

远程遥控机器人设计与实现一、设计与构造1.确定需求:首先需要明确机器人的用途和功能,例如用于巡逻、探索或者搬运等。
根据需求来确定机器人的尺寸、形状和动力系统等。
2.构造机器人框架:选择合适的材料搭建机器人的框架,可能需要用到金属、塑料或者3D打印材料。
3.安装电机与传感器:根据机器人的用途,根据需要安装电机和传感器,例如驱动电机、摄像头、超声波传感器等。
4. 添加控制系统:选择合适的控制模块,例如Arduino或者树莓派,将其安装在机器人上,并与电机和传感器连接。
5.设计蓄电池和电路系统:选择合适的电池并设计电路系统,以供机器人提供动力。
二、无线遥控1.选择合适的无线通信模块:选择可靠的无线通信模块,例如蓝牙、Wi-Fi或者射频模块,用于机器人和遥控设备之间的通信。
2.搭建通信系统:根据选定的通信模块,搭建机器人和遥控设备之间的通信系统。
可能需要编程和配置模块,使其能够相互通信。
3.编写遥控程序:为遥控设备编写程序,使其能够与机器人进行通信并发送指令。
4.连接遥控设备和机器人:将遥控设备和机器人分别连接到所选的通信模块,并进行配对和配置。
三、远程操作1.启动遥控设备:启动遥控设备,连接到机器人的通信模块。
2.与机器人建立连接:在遥控设备上选择机器人,并与机器人的通信模块建立连接。
3.远程操控机器人:通过遥控设备发送指令,例如移动、旋转、拍照或者执行任务等。
四、注意事项1.安全性:在远程控制机器人时,要确保安全性,避免被非法入侵或者黑客攻击。
可以采用数据加密和身份验证等安全措施来保护通信安全。
2.通信距离:无线通信模块的通信距离有限,因此要确保机器人和遥控设备在有效的通信范围内。
3.电池寿命:机器人通常使用电池供电,要确保电池寿命足够长,以免在使用过程中电池耗尽导致机器人失去动力。
4.传感器精度:机器人的传感器要具备足够的精度,以便能够准确感知周围环境,并将信息传递给遥控设备。
5.可靠性和稳定性:在选择材料和组装机器人时,要保证机器人的可靠性和稳定性,以确保在远程控制过程中不出现故障。
基于单片机的无线遥控智能小车的设计与制作

综合理论245学法教法研究课程教育研究基于单片机的无线遥控智能小车的设计与制作马维维(海南省经济技术学校 海南 海口 571158)前言按照目前多元工业调整动机观察,有关计算机管制范围下的自动化遥控技术开始广受关注,尤其机器人的智能管理方案,能够承担人力在现实生产流程中无法承担的职责要务。
无线遥控小车是沿着上世纪军事理念进行同步改造、设计,为适应防爆危险以及污染效应环境产生,整体布置活动成本不高,发展优势广阔。
我国在开展危险性较高的行业过程中,气体泄露和泥石流地震现场监则工作对人员生命安全造成一定威胁,因此开发意义深刻,需要设计开发人员予以重视。
一、无线遥控小车的设计本文所设计的智能小车主要由3 部分组成:智能小车部分: 车体部分以及2 路电机、单片机STC89C52、驱动电路、红外避障模块;无线通信模块: CC1101 无线通信模块、RS232-TTL 转换电路;系统软件设计: 主要有上位机软件设计和单片机程序设计。
1、遥控小车车体的主要结构遥控小车主要包括: 单片机系统、红外避障模块、无线通信模块、驱动电路。
小车通过红外传感器完成对前方、左方和右方3 个方向的障碍物检测,并以TTL 电平信号的形式送入单片机的I /O 口。
单片机根据收到的信号,进行判断,发出控制信号,通过驱动电路实现小车避障。
上位机经无线模块向单片机发送控制信号,单片机依照应用层的通信协议,对控制信号进行识别判断后控制小车做相应动作。
2、硬件电路设计本系统以STC89C52 单片机为核心控制器,硬件电路主要包括以下几个模块:(1)避障模块。
避障模块利用3 路红外传感器来判断小车前方、左方和右方的障碍物。
当检测范围内无障碍物时,红外传感器向单片机发送高电平; 一旦检测范围内出现障碍物,则发送低电平。
传感器模块有+5V 、GND 、MCU 三根接口线,其中MCU 接口线输出TTL 电平,可以直接连接单片机I \O 口,无需进行电平转换。
基于东软载波单片机的RF2.4GHz无线遥控智能车设计
工业技术科技创新导报 Science and Technology Innovation Herald86随着科技发展的需要,智能车作为自主移动机器人在工业生产及生活中得到了广泛应用[1]。
文章设计的R F 2.4G 无线遥控智能车是上海东软载波微电子有限公司“基于H W 2000、H R7P194芯片的童车系统开发”项目的开发与测试平台,该系统具有自主运行与远程遥控两种模式,具有R F 2.4 GH z 对码、前进、后退、左转、右转、高速、中速、低速、刹车等功能。
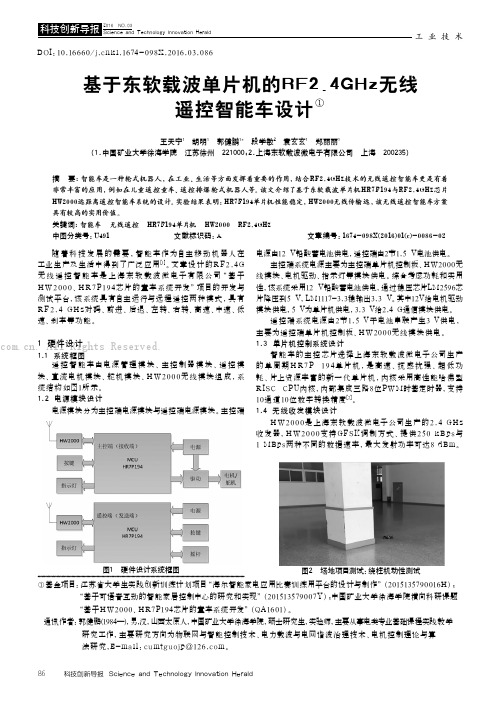
1 硬件设计1.1 系统框图遥控智能车由电源管理模块、主控制器模块、遥控模块、直流电机模块、舵机模块、H W2000无线模块组成,系统结构如图1所示。
1.2 电源模块设计电源模块分为主控端电源模块与遥控端电源模块。
主控端电源由12 V铅酸蓄电池供电,遥控端由2节1.5 V电池供电。
主控端系统电源主要为主控端单片机控制板、HW2000无线模块、电机驱动、指示灯等模块供电。
综合考虑功耗和实用性,该系统采用12 V铅酸蓄电池供电,通过稳压芯片LM2596芯片降压到5 V,LM1117-3.3稳输出3.3 V。
其中12V给电机驱动模块供电,5 V为单片机供电,3.3 V给2.4 G通信模块供电。
遥控端系统电源由2节1.5 V干电池串联产生3 V供电,主要为遥控端单片机控制板、HW2000无线模块供电。
1.3 单片机控制系统设计智能车的主控芯片选择上海东软载波微电子公司生产的单周期H R7P 194单片机,是高速、抗感扰强、超低功耗、片上资源丰富的新一代单片机,内核采用高性能哈佛型RISC CPU内核,内部集成三路8位PW M时基定时器,支持10通道10位数字转换精度[2]。
1.4 无线收发模块设计H W2000是上海东软载波微电子公司生产的2.4 GH z 收发器,H W 2000支持GF SK调制方式、提供250 k Bp s 与1 M Bp s两种不同的数据速率,最大发射功率可达8 dBm。
基于单片机的无线遥控小车设计-文献综述

毕业论文文献综述机械设计制造及其自动化基于单片机的无线遥控小车设计一、国内外研究现状无线电遥控是利用无线电信号来对远方的各种机构进行控制的技术,这些信号被远方的接收设备接收后,可以指令或驱动其它各种相应的机械,去完成各种操作,已经广泛运用于机械领域,不但提高机械的自动化程度和操作性,还改善了操作人员的工作环境啊。
并且与我们的生活也越来越接近,比如遥控门窗,遥控风扇、遥控座椅、遥控小车等都是无线电技术的成功应用于生活的例子。
二、研究主要成果智能小车,也称轮式机器人,是一种以汽车电子为背景,涵盖控制、模式识别、传感技术、电子、电气、计算机、机械等多学科的科技创意性设计。
从普通的玩具遥控车到无限工业控制车辆,从短程控制到外太空探险小车的控制,可以预见今后无线智能遥控小车的应用将更加广泛。
在最近几年,随科学技术的进步,智能化和自动化技术的普及,各种高科技广泛应用于玩具制造领域,使其娱乐性和互动性不断提高。
根据美国玩具协会的调查统计,近年来全球玩具销量增幅与全球平均GDP增幅大致相当。
而全球玩具市场的内在结构比重却发生了重大变化:传统玩具的市场比重在逐步缩水,高科技含量的电子玩具则蒸蒸日上。
美国玩具市场的高科技电子玩具的年销售额2004年较2003年增长52%,而传统玩具的年销售额仅增长3%。
英国玩具零售商协会选出的2001年圣诞最受欢迎的十大玩具中,在七款玩具配有电子元件。
从这些数字可以看出,高科技含量的电子互动式玩具已经成为玩具行业发展的主流。
普通的无线遥控车大家都很熟悉,市场里有很多提供小孩子玩玩的遥控小车,还有神奇的天堂电玩WII。
三、发展趋势无论是简单的还是难的,熟悉的还是不熟悉的,智能无线遥控小车最基本的功能就是无线控制和启动两方面,在这个基础上,可以再加上更多的复杂功能,比如:①测速:由单片机定时器根据高低电平计数脉冲与车轮周长通过算法得出车速,再根据车速和行驶时间得出行驶里程。
②红外避障:红外发射管通过三极管和电阻接到一从单片机的PB口,红外接受管的数据口接到它的PC口,当检测到有障碍物时,接受管的数据口输出为低电平并送从单片机,若未检测到障碍物袁则接受管的数据口输出为高电平,另外,单片机控制红外发射管发射红外光采用的是断续式,即可定时发射或关闭发射袁,若一直让红外发射管发射,则接受管接受到的电平一直为高电平,相当于接受管没有正常工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DOI:10.19392/ki.1671-7341.201823003基于单片机的无线遥控移动机器人
臧㊀莹
1.天津职业技术师范大学㊀天津㊀300000;
2.驻马店技师学院㊀河南驻马店㊀463000
摘㊀要:随着我国科学技术的不断向前发展,很多的机器人在人们的日常生活中开始扮演重要的角色㊂单片机机器人也开始走向人们的生活中,就目前为止,单片机机器已经在智能家电㊁精密仪器以及复杂的控制领域起到了非常重要的作用㊂本文针对单片机的无线遥控的移动机器人进行了非常深入的分析㊂
关键词:单片机;无线遥控;机器人;移动
㊀㊀单片机机器人已经开始走进人们的生活,在单片机机器人运行过程中需要有精确的数据传输,数据接收以及行动,需要我们不断的去探索和发现㊂
一㊁单片机的遥控机器人的发展现状
单片机的无线遥控移动机器在目前已经得到了较好的发展,单片机无线遥控移动机器人中,各个数据模块已经发展的较为成熟,机器人能完整的完成有目标的移动㊁进行功能性的作业,并且在进行开发的过程中成本已经打大幅度的下降㊂在未来将会有较好的发展㊂
二㊁单片机无线遥控移动机器人的组成及原理
在单片机的无线遥控的机器中,主要的组成设备分为两个重要的大部分,第一部分为单片机机器人的遥控设备,另一部分为单片机机器人的机器人体部分㊂在遥控的设备中,有分为单片机模块,遥控的手柄键盘部分㊂仪器的供电电路部分和晶振电路以及设备的复位电路㊂在遥控的机器人的部分分为车体的单片机模块以及机器内部的电子指南针的模块以及机器人的超声波测距模式,供电电路以及机器人运行的行动模块,和机器内部的测距模式㊂下面将对于机器人内部的各项模块进行分析和阐述㊂
(一)机器人内部的无线接收装置
在普通的单片机中,对于机器内部的无线接收模块一般会选择APC220模块进行㊂在这个模块中,主要采用的无线的接受和采用的装置为半双工通信方式进行指令的传输,在传输的信号中包含机器人的机械动作和移动坐标㊂在进行数据的传输的过程中所采用的为9600波特率进行数据的传输,来保证数据传输过程中的稳定性㊂在对于此模块进行供电时,一般会采用3.6v的电压进行供电,在使用的过程中对于电量的消耗较低㊂但是此过程中的传输中,应该避免出现数据传输的丢失,因此应该注意数据传输过程中的传播速度㊂
(二)单片机机器人的显示模块
在进行单片机机器人的设计时,对于显示模块的选择,一般来说会选择MzLH0312864液晶显示模块㊂这种显示模块主要的组成部分为行或者列的驱动器以及全点阵的液晶显示器组成㊂此模块的设计访问模式为直接访问,将显示器的控制引脚和单片机的接口相连㊂在单片机的模组中包含一个能够进行复位的引脚,在使用的过程中可以通过对于模块的引脚进行低脉冲的模组进行输入,使得模块进行复位,但是应该注意低电平的输入时间,只有在模块输入之后才能够进行模块的操作㊂
(三)超声波测距模块
在本机器人中,所采用的模块为DYP-ME007模块㊂此模块主要的应用原理是在使用的过程中,机器人可以通过模块发出的超声波进行测距,也可以通过对于传播过程中的障碍物进行模块的测距㊂主要的应用原理为声波测距㊂
三㊁软件程序设计
在进行单片机机器人的遥控设计过程中,对于机器人和遥控部分的成熟设计至关重要,关系着程序软件是否能够进行正常的运行㊂首次进行的是单片机的遥控部分的设计㊂首先在单片机通电之后,应该对单片机的液晶显示部分以及单片机的无线传输模块进行初始化,在初始化完成之后,应该对单片机的串行口的运行方式进行设计㊂之后对于遥控部分的案件数据传输质量进行程序的设计,在设计完成之后,对于按键的情况进行有效的调节,应用单片机的串口和液晶显示的仪表进行检验检测㊂
在遥控部分设计完成之后,对于机器人的主体部分进行设计,程序设计的过程中相类似㊂在进行单片机的通电之后,对于机器人内部的初始化液晶模块㊁信号接收模块㊁声波感应模块以及电子指南,运行串口进行设计㊂在完成各个程序的设计之后,应该加强对于设计程序的调试工作,将已经调试好的遥控模块对机器人发出指令,在串口发出指令之后,机器人按照遥控的方式进行有效的运行㊂在进行指南模块的设计过程中,应该设计自动坐标让机器人根据指令进行行走,并且在经过一段时间之后,应用超声波模块进行位置的感应,进行位置的确定,并将得到的数据进行单片机,通过显示模块进行显示,去寻找数据中的实际问题㊂
四㊁测试结果结论
(一)测试过程中所使用的工具
测试采用秒表㊁刻度尺㊁卷尺等仪器㊂
(二)测试方法
(1)将机器人放在能够进行顺利移动的位置,将机器人进行通电,使用设计好的遥控装置对机器人进行操作,其中不仅包括基础动作,还应该包含机器人初始设计的设计功能㊂(2)进行坐标定位测试,将机器人放在具有坐标轴的试验台,在设计好位置之后,应用遥控装置对机器人进行设定,检查其是否能够到达设定位置㊂
(三)测试结果及结论
在经过多次测试之后,机器人在运行的过程中表现良好,不仅仅能完整的做到基础动作,还对于初始设计的功能动作较好的完成,没有任何的障碍㊂在进行机器人的位置测试时,在进行指令发出之后,机器人能够较好的到达所设定的位置㊂经过多次测量实验,机器人在进行位置测定中出现较小误差,在范围之内㊂
五㊁结语
本文针对单片机无线遥控移动机器人的现状进行了阐述,并针对无线遥控机器人在研究中的模块选择㊁程序设计以及结果调试进行了深入的分析,希望促进单片机无线遥控移动机器人的发展㊂
参考文献:
[1]谭家玉,等.单片机原理及接口技术:凌阳16位及51系列8位单片机[M].哈尔滨工业大学出版社,2003(2).
[2]罗本成,等.机器人多路超声波环境探测器的研制[J].中国科学院研究生院学报,2002,6(19):172-176.
[3]叶郑凯,朱建鸿,李琳,王幼琴.基于单片机的无线遥控智能小车的设计与实现[J].计算机与现代化,2012,10(206): 65-67.
[4]陈海松,李益民.基于AT89C51单片机的智能避障遥控机器人的设计[J].黄石理工学院学报,2011,27(3):9-12.
[5]伍刚,周玉荣.基于SPCE061A单片机实现智能小车设计[J].单片机开发与应用,2010,26(2-2):120-122.
3
㊀科技风2018年8月
科技创新。