基于船舶动态的船闸调度模型
基于计算机仿真的船闸联合调度方案研究

Onmut l—a e o k S on h d l gpa a e nc mp trs lt n lp e ln c ’ it c e ui lnb sdo o u e muai i l j s n i o
S HANG Ja — ig W U P n T in pn , e g, ANG Yig n
h do jn t npoet ae ntelc ae p rt gpo e ue , o p t mua o o e ulic dn y r-u ci r c.B sdo k g eai rc d rs acm ue s l inm d ls i l ig o j h o o n ri t i b tn u a c oa e h n e & a po c h n e, aa e fu —a esi c , hp s on c e uig r. ho g e n h rg,c a n l p rahc a nl p rl l or ln hpl k si’ jit h d l ,ee T ru ht l o s n h
21 0 1年 9月
水 运 工 程
Po t & W a e wa Engne rng r tr y i ei
Sp 2 1 e . 01
N O 9 Se ilNO. 5 . ra 47
第 9期
总第 4 7期 5
船闸的工作原理动画
船闸的工作原理动画
船闸是一种水利工程设施,用于调节河流、运河水位以便船舶通过。
船闸的工作原理是通过控制水流和水位的高低来实现的。
下面通过动画形式详细介绍船闸的工作原理。
1. 船闸结构
船闸通常由进水闸、出水闸、闸门、溢流堰等部分组成。
进水闸和出水闸用于控制水流的进出,闸门用于封闭船闸的通道,溢流堰用于缓解水压。
2. 船闸工作原理动画
1.开始:船闸的闸门关闭,水位与上游河道齐平,下游水位较低。
2.船舶接近:当船舶接近船闸时,船闸的进水闸打开,水从上游流入船
闸。
3.水位上升:闸门下游的水位逐渐上升,使船舶可以平稳地驶入船闸。
4.闸门关闭:当船舶驶入船闸后,进水闸关闭,闸门封闭。
5.排水:此时出水闸打开,船闸中的水流向下游排放。
6.船舶通过:当船闸中的水位与下游水位齐平时,船舶可以安全通过船
闸。
7.完成:船闸的闸门打开,船舶顺利通过,船闸恢复待命状态。
3. 结语
通过以上动画演示,我们可以清楚地了解船闸的工作原理:通过控制水流和水位的变化,实现船舶通过船闸。
船闸在水运和船舶运输中扮演着重要的角色,这种水利设施的设计精巧,为船舶提供了便捷和安全的通道。
希望本文所提供的船闸工作原理动画能够帮助读者更加直观地理解船闸的运作过程。
三峡船闸实际通过能力的一个动态模型

Ke y wor s T reGog ss i c ;rf cc p ct; y a cmo e d : h e re hpl k t f a a i d n mi o ai y dl
三峡工 程蓄水 后 ,库 区航道条 件 的改善 激
发 了川 江水 运 的潜 能 ,三 峡 过 坝货 运 量 从 2 0 年 I 02 的 180 t  ̄ 2 1年 的880 t 展 速度 远 0 万 发展 10 0 1 0 万 ,发 远 超 过 预期 ,在 部 分 时段 三 峡 坝 区曾 出 现大 量 待 闸船 舶 ,引发 了关 于 三 峡船 闸通 过 能 力 问题 的争
程 成 库 后 川 江航 运 条 件 大 幅 变化 情 况 下 ,曾多 次 出现 有 关 三 峡 船 闸通 过 能 力 的计 算 结 果 小 于 实 际 通 过 量 的情 况 。针对 上 述 问题 ,本 文 拟 采 用参 数 结构 化 和 动 态 化 的方 法 ,构 建 三峡 船 闸实 际 通 过 能力 动 态 模 型 ,以期 反 映船 闸 通过 能 力 和 运行 闸 次 、船 舶 吨位 、船舶 艘次 的动 态变 化关 系 。
Dy mi o lo t a cc pa iy o na cm de n r f a c t fThr eGor e hi l c i e g ss p o k
GU0 Ta o
(hnj n i r d ii rt noS ipn f i f T Wu a 30 4 C ia C ag agRv m ns a o p ig f r o i eA t i fh A a s MO , hn4 0 1, hn)
P = ( m ) znm- o ^
( 4)
式 中 :m为每 闸次平 均船 舶艘 次 ;m 每 闸次平 均 为 非货 运船 舶艘 次 ;g 为过 闸货 运船 舶平 均 载重 吨 。
船舶调度管理系统设计研究

船舶调度管理系统设计研究第一章:绪论1.1 研究背景船舶作为一种重要的运输工具,对全球贸易和物流业发挥着至关重要的作用。
在海上运输过程中,船舶调度管理系统的设计和实施对于确保船舶运行的安全、高效和有序至关重要。
目前,随着信息技术的不断发展和更新,船舶调度管理系统也进入了一个新的发展时代。
1.2 研究目的和意义船舶调度管理系统设计是指利用计算机和相关技术实现船舶调度管理中的各项业务功能,从而提高船舶运输的效率和安全。
本文的目的是探讨船舶调度管理系统的设计和实施的相关技术问题,以推动船舶调度管理系统的研究和发展,提高我国海运业的发展和整体竞争力。
第二章:船舶调度管理系统设计的基本原理2.1 船舶调度管理系统设计的功能特点船舶调度管理系统的设计要求具有实时性、高效性和全面性。
其基本功能包括船舶调度、实时监控、数据管理以及安全保障等内容,通过建立完善的数据处理流程和技术手段,能够快速响应各类运输任务请求,优化船舶资源分配和航线规划,实现船舶运输的高效、安全和可持续发展。
2.2 船舶调度管理系统设计的技术原理船舶调度管理系统的设计需要借鉴多种技术手段,包括信息技术、数据挖掘、人工智能等。
其中,信息技术是船舶调度管理系统的核心和基础,通过互联网、通信技术和数据采集技术等手段,建立起多种数据交换平台,实现海洋航行数据的统一管理和发布。
同时,数据挖掘技术可以对海洋航行数据进行深度的分析和挖掘,实现海洋数据的实时监控和预警。
而人工智能技术则可以通过不断学习和自我优化,提高船舶运输的安全性和效率。
第三章:船舶调度管理系统设计的实现方法3.1 船舶调度管理系统的数据采集和处理在船舶调度管理系统的设计中,数据采集和处理是至关重要的过程。
通过采集各种船舶运输参数和实时数据信息,并进行分类和处理,实现海洋航行数据的全面、准确和实时汇总。
同时,还可以借助数据挖掘和人工智能技术,实现对海洋航行数据的快速分析和判断。
通过建立完善的数据采集和处理流程,可以实现船舶调度管理系统的高效和稳定运行。
区域船闸群统一运行调度管理系统的构建

摘要:阐述了国内代表性船闸运行调度现状,基于提高船闸的运行和调度效率的工作需要,围绕船闸服务友好便捷、运行安全可靠、调度经济高效的总体目标,通过建立区域船闸群统一运行调度管理系统,整合、利用、优化集控系统等信息资源,并结合前沿信息技术,建设了集数据汇聚、存储、交换、分析、服务于一体的支撑平台,实现了对扬州六所船闸的统一调度业务,充分发挥了扬州市区域内航运的社会效益。
关键词:智能航运;船闸运行;管理系统0 引言船闸属通航建筑物,是调节水位的重要航运基础设施,也是内河航道网的重要节点。
江苏省属平原水网地区,内河航道通航总里程24 300多km,有通航船闸113座,船舶通过船闸的效率是制约航道通过能力的主要因素。
目前,江苏不少交通船闸通过量已远超设计标准,船闸经常出现拥堵情况,船舶等待过闸时间较长,影响了航运周转效率,不能很好地满足行业发展和船员群众的需求。
解决船闸拥堵的办法一是开展船闸扩建改造,增加闸室规模,提高通航等级,但此方式投资大、周期长,且面临土地、生态等资源约束;二是通过优化船闸运行模式,加强调度管理,运用智能化手段,提高自动化程度,提升船闸通行效率和通过能力。
船闸运行管理的核心内容是船舶过闸调度,直接反映船闸为民服务水平和运行效能优劣,关乎船舶安全、高效、有序进出船闸,甚至影响一定范围内的航道网运行状况。
只有充分运用现代信息技术,实现更加精准的人性化科学调度,才能保障船闸设施的安全高效运行,从而充分发挥其经济和社会效益。
1 国内代表性船闸运行调度现状江苏自2012年开始推出并持续完善“水上ETC”便民服务措施,船舶在通过江苏交通船闸时,船员远程无接触就能办理过闸手续,省时、省力、省心,高效、方便、快捷。
水上ETC系统通过优化重组船舶过闸流程,利用物联网、大数据、移动互联网等信息通信技术,实现不上岸、不见面便捷过闸服务,靶向解决了船舶过闸手续烦琐、群众办事不方便的行业痛点难点。
江苏省交通部门首次系统性提出并成功组织开发应用水上ETC系统,推动了“互联网+内河航运”发展,在行业内外形成一定示范效应,引领了全国各地过闸服务模式创新变革风潮。
基于Simulink的船舶运动模型的建立与仿真
摘要船舶运动数学模型是船舶运动仿真与控制问题的核心。
目前,船舶运动数学模型建模中主要有两大流派:以Abkowite为代表的整体型结构模型和日本拖曳水池委员会(JTTC)提出的分离型结构模型,简称MMG模型。
本文主要是对于船舶的回转运动进行研究,采用的是MMG模型。
根据13000T散货船的主要参数,通过计算求出所需的相关量,建立了船舶的线性响应型模型。
在此模型的基础上,利用MATLAB中的Simulink模块将此数学模型在该软件中建立一个仿真模型。
在Simulink中对建立的仿真模型进行运行得到船舶运动参数。
通过Simulink的外部模式将仿真结果变成实时输出数据,利用RS232发送并接受数据,用Visual C++连接数据库和RS232的数据提取,再利用Visual C++与SQL的接口读取数据,并通过OSG进行实现船舶回转运动的可视化虚拟仿真。
关键词:船舶回转运动;数学模型;Simulink;视觉仿真;OSGAbstractThe ship motion mathematical model is the problem’s core about the ship motion simulation and control. Currently, there are two major schools in the ship motion mathematical model’s modeling: the overall structure model represented by Abkowite and the separation of structure model referred to as the MMG model proposed by the Japan Towing Tank Committe e (JTTC). This article mainly research on the rotary movement of the ship, using the MMG model. Based on the 13000T bulk carrier’s main parameters, we obtain the required relevant amount by calculating. Then we establish the linear response model of the ship. On the basis of this model, we transfer this mathematical model into a simulation model with the Simulink module of MATLAB. In Simulink, we get the ship motion parameters through running the simulation model. Through Simulink’s external mode, we converse the simulation results into real-time output data, using a standard serial port RS232 to send and receive data. Then we use Visual C++ to connect the database with RS232 data extraction. Using Visual C++ interface with SQL to read database, and conducted by OSG to enable visualization of the ship turning motion of the virtual simulation.Keywords: ship turning motion;mathematical model;Simulink;visual simulation;OSG目录第一章绪论 (1)1.1 课题研究现状 (1)1.2 本课题的意义 (2)第二章响应型船舶运动数学模型的建立 (4)2.1 线性响应模型 (4)2.1.1 线性船舶运动数学模型的建立 (4)2.1.2 线性响应模型 (11)2.2 船舶运动的风、流干扰力数学模型 (12)2.2.1 风的干扰力数学模型 (13)2.2.2 水流的干扰力数学模型 (14)2.2.3 风和流共同作用下船舶的操纵模型 (15)2.3 模型参数的计算 (15)2.3.1 船舶质量与转动惯量的计算 (16)2.3.2 流体动力及流体动力导数的计算 (16)2.3.3 K、T、C的计算 (19)2.3.4 风、流模型中的参数计算 (19)第三章基于Simulink的船舶运动模型的建立与仿真 (21)3.1 Simulink的简介 (21)3.2 线性响应型船舶运动模型的建立 (22)3.2.1 流体动力模型的建立 (23)3.2.2 操纵性指数K、T模型的建立 (29)3.2.3 线性响应型船舶运动模型的建立 (30)3.3 风、流模型的建立 (31)3.3.1 风力模型的建立 (31)3.3.2 流力模型的建立 (34)3.3.3 附加舵角δ∆模型的建立 (34)3.4 模型的整合 (35)3.4.1 压缩子系统 (35)3.4.2 模型的组合 (36)3.5 仿真试验 (38)3.5.1 回转试验 (38)3.5.2 风对船舶运动影响 (40)3.5.3流对船舶运动的影响 (41)3.5.4 结论 (42)第四章Simulink与数据库的连接及视觉仿真的实现 (43)4.1 Simulink模型仿真结果的实时输出 (43)4.2 利用VC++连接数据库与RS232的数据提取 (44)4.3 利用0SG实现视觉仿真 (47)第五章结论 (51)5.1 存在的问题及解决方案 (51)5.2 发展前景 (51)致谢 (52)参考文献 (53)附录I (54)第一章绪论1.1 课题研究现状船舶运动控制以其重要性和复杂性仍然是国内外研究的热点领域。
沿江口门船闸调度运行模式思考

沿江口门船闸调度运行模式思考朱鹏(江苏省谏壁船闸管理所,江苏 镇江 212006)摘 要:通过分析沿江口门船闸的特点和分散调度模式存在的问题,大胆创新尝试集控调度运行模式,有效地解决了调度中的不足,大大地提高了口门船闸调度的效率。
关键词:沿江口门船闸;调度模式;思考中图分类号:U641 文献标识码:A 文章编号:1006—7973(2018)11 -0044-02DOI编码:10.13646/ki.42-1395/u.2018.11.014江苏省境内有航道船闸49座,其中,单线29座、双线11座、三线9座,沿江口门船闸12座,大部分都是复线船闸。
下面以谏壁船闸为例谈谈沿江口门船闸调度运行模式。
谏壁船闸地处江苏省镇江市的谏壁镇,是苏南运河与长江交汇口的沿江口门船闸,是连接苏南、苏北地区水上交通运输的重要通道,素有“江南第一闸”的美誉。
随着苏南运河“四改三”等航道工程的建设,航道的硬件设施逐年改善,通航能力不断增强,与之相匹配的航闸管理软件建设就显得愈加迫切和重要,尤其是沿江口门船闸。
1 谏壁船闸的概况及沿江口门船闸的特点谏壁船闸是双线闸,一线船闸建于1980年,建设规模为230×20×4(m),二线船闸建于2001年,位于一线船闸的东侧,其纵轴线间距为80米,建设规模为230×23×4(m),设计最大船舶等级1000t。
一、二线船闸上游共用引航道在1.2km处与节制闸上游引河汇合,并与长江相连;一、二线船闸下游共用引航道,引航道在0.7km处与节制闸的下游引水河汇合后与苏南运河相通。
由于地理位置、潮汐的影响,沿江口门船闸均有引航道短、锚泊区有限、水位变化大、来船时间段相对集中等共同特点。
2 分散调度模式存在的问题分散调度运行模式是目前江苏船闸采用的通用调度模式,多年使用下来,对沿江口门复线船闸来说还存在一些问题和不完善的地方。
(1)需要的人员多。
以复线船闸为例,原船闸运行现场管理多采用三班三运转或四班三运转的工作制度,四闸首分散调度每天需要12名调度员才能确保船闸24小时通航。
船闸通航调度系统框架设计

第20卷 第10期 中 国 水 运 Vol.20 No.10 2020年 10月 China Water Transport October 2020收稿日期:2020-04-03作者简介:赵显峰,交通运输部规划研究院。
船闸通航调度系统框架设计赵显峰,房延军(交通运输部规划研究院,北京 100028)摘 要:近年来,随着我国内河航道等级的不断提升和扩展,内河水路运输货运量的持续发展,地方船闸的建设也越来越多。
本文旨在研究船闸通航调度系统,为缓解船闸通航压力,保障内河航运的通航秩序和通航效率提供技术支撑。
关键词:船闸;通航;调度中图分类号:U691 文献标识码:A 文章编号:1006-7973(2020)10-0026-02一、背景2019年,交通运输经济运行总体平稳,投资规模高位运行,水路货运量实现较快增长,全年水路完成货运量74.7亿吨,同比增长6.3%。
为了提升内河航运的通过能力,缓解船闸通航压力,建设船闸通航指挥调度管理的综合信息系统是很有必要的。
通过系统的建设与实施,为科学、高效的利用好枢纽船闸航运设施,保障内河航运的通航秩序,促进船闸枢纽通航效率的提升是有重要意义的。
二、需求分析 1.船舶动态信息船舶通过船闸通航调度系统需要按照预先制定的调度计划有序进行,要制定船舶调度计划首先需要掌握船舶的动态以及船舶报到等相关信息,因此调度系统需通过统一的数据访问平台,按照相关的协议标准实时动态接收船舶位置信息,并通过访问船舶基础信息库,对相关船舶类型进行判定,将符合通过调度系统要求的船舶放入待调度队列中等待调度。
2.船舶申报安检当船舶进入待闸区域时,海事安检部门可以根据来船情况逐一对船舶进行安检,核实船舶申报的真实性、核实船舶真实性等。
如果船舶属于诚信企业或诚信船舶,且属于已安检过船舶(其他航段安检),可适当采取抽查方式进行安检。
3.制定调度计划系统针对已经进入待调度队列的船舶、根据锚地或待闸区使用、调度系统运行状态等实际情况,结合船舶类别信息以及相关通航调度规则等约束条件,实现自动生成调度系统调度计划,并将调度计划信息通过统一数据访问平台发送至船闸调度,以便船闸进行相应的计划编制及调整。
动态发航链式调度在三峡通航中的应用

钟 ; 迎 向 运 行 时 ,船 闸 ( 号 闸 除 外 )上 一
据 此 推 算 , 采 用 动 态 发 航 链 式 调 度 组 织
下 游 靠 船 墩 各 停 靠 有 一 个 闸 次 的船 舶 , 船 舶 的 发 航 时 间 应 比 进 闸 时 间 提 前 10 6 分 钟 以 上 。 葛 洲 坝 船 闸 引 航 道 内 始 终 有
行 人 员 通 过 甚 高 频 无 线 通 话 系 统 、C T CV 视 频 监 视 系 统 实 现 对 船 舶 航 行 动 态 监 视 和 过 闸 调 度 指 挥 , 调 度 计 划 编 制 人 员 通 过 三 峡 一葛 洲 坝 水 利 枢 纽 通 航 系 统 、GP S 系统 、C T 视 频 系 统 完 成 船 舶 过 闸 调 度 CV 作 业 计划 的编 制 发 布 ,计划 执 行 人 员 、 安 全 监 管 人 员 通 过 V S系 统 、GP T S系统 、 C T 视 频 系 统 实 现 对 船 舶 过 坝 的全 程 跟 CV
三 峡 通 航 船 舶 监 管 系 统 投 入 试 运 行 3年 , 5 9公 里 河 段 实 现 通 航 监 视 系 统 全
三 峡 、葛 洲 坝 两 坝 枢 纽 船 闸 的 通 航 交 通 组 织 由 通 航 指 挥 中 心 负 责 , 三 峡 枢
覆 盖 。船舶 通过 GP s系统远 程 申报 船舶 过 闸计 划 ,船 闸集 控 人员 、调度 计 划执
组 织 采 用 一 次 性 发 航 的 发 航 组 织 方 式 能 够满 足船 闸运行 的需要 。
控 制 节 点 或 靠 船 墩 长 时 间 等 待 距 离 远 的 现 象 , 减 少 船 舶 主 机 的 运 行 时 间 , 降 低 船舶燃 料油耗 。据统 计 ,一艘 4 0 5 0吨 级 货 船 , 机 功 率 为 18 主 0 0千 瓦 , 一 般 航 速
船闸工作原理及过程

船闸工作原理及过程船闸是一种水利建造物,用于调节水位、控制船只进出的设施。
它的工作原理和过程是船舶通过船闸,通过调整水位来实现船只的升降和航行。
一、船闸的工作原理船闸的工作原理基于水力学和浮力原理。
当船只需要通过船闸时,船只先进入船闸的上游船闸室。
然后,通过关闭上游闸门和打开下游闸门,将船闸室封闭。
接着,通过控制闸室内的水泵或者闸门,将水从上游泵入或者闸门打开,使水位逐渐上升。
当水位上升到与下游水位相等时,可以打开下游闸门,船只就可以通过船闸继续航行。
船闸的工作原理可以简单概括为:通过调节水位来实现船只的升降和航行。
二、船闸的工作过程船闸的工作过程可以分为以下几个步骤:1. 船只进入船闸室:船只从上游驶入船闸室,通常需要船只与船闸室之间有足够的空间,以确保船只可以安全进入船闸室。
2. 封闭船闸室:当船只彻底进入船闸室后,需要关闭上游闸门和打开下游闸门,将船闸室封闭。
这样可以防止水流进入船闸室,以准备调节水位。
3. 调节水位:通过控制闸室内的水泵或者闸门,将水从上游泵入或者闸门打开,使水位逐渐上升。
调节水位的目的是使水位上升到与下游水位相等,以便船只可以通过船闸。
4. 打开下游闸门:当水位上升到与下游水位相等时,可以打开下游闸门,让船只通过船闸继续航行。
5. 船只离开船闸室:船只通过打开的下游闸门离开船闸室,继续航行至下一个目的地。
船闸的工作过程可以根据实际情况进行调整和改变,但基本原理和步骤是相似的。
三、船闸的应用船闸广泛应用于河流、运河和港口等水域,用于调节水位、控制船只进出。
船闸的建设和运营对于水运业和经济发展具有重要意义。
船闸的工作原理和过程的理解对于船闸的设计、建设和维护具有重要的指导意义。
合理的船闸设计和高效的船闸运营可以提高水运的效率,促进经济的发展。
总结:船闸是一种用于调节水位、控制船只进出的水利建造物。
它的工作原理基于水力学和浮力原理,通过调节水位来实现船只的升降和航行。
船闸的工作过程包括船只进入船闸室、封闭船闸室、调节水位、打开下游闸门和船只离开船闸室。
第6章 船舶运动控制系统建模应用
第6章船舶运动控制系统建模应用6.1 引言数学模型化(mathematical modelling)是用数学语言(微分方程式)描述实际过程动态特性的方法。
在船舶运动控制领域,建立船舶运动数学模型大体上有两个目的:一个目的是建立船舶操纵模拟器(ship manoeuvring simulator),为研究闭环系统性能提供一个基本的仿真平台;另一个目的是直接为设计船舶运动控制器服务。
船舶运动数学模型主要可分为非线性数学模型和线性数学模型,前者用于船舶操纵模拟器设计和神经网络控制器、模糊控制器等非线性控制器的训练和优化,后者则用于简化的闭环性能仿真研究和线性控制器(PID, LQ, LQG, H∞鲁棒控制器)的设计。
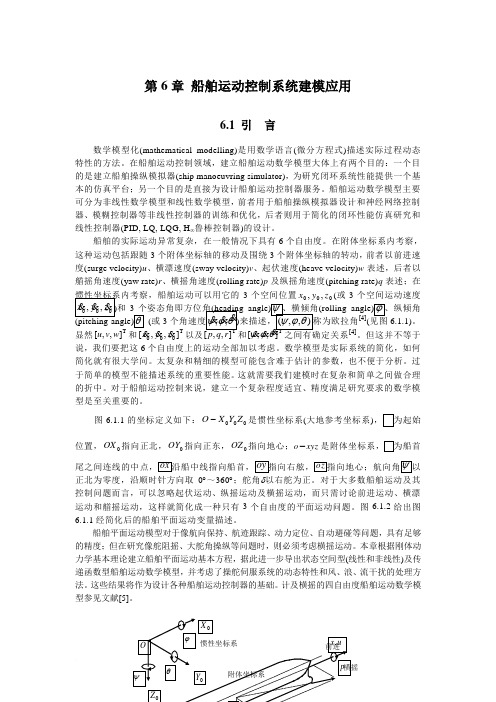
船舶的实际运动异常复杂,在一般情况下具有6个自由度。
在附体坐标系内考察,这种运动包括跟随3个附体坐标轴的移动及围绕3个附体坐标轴的转动,前者以前进速度(surge velocity)u、横漂速度(sway velocity)v、起伏速度(heave velocity)w表述,后者以艏摇角速度(yaw rate)r、横摇角速度(rolling rate)p及纵摇角速度(pitching rate)q表述;在3个空间位置,,zyx(或3个空间运动速度和(rolling(或3[4](6.1.1)。
显然T],,[wvu和T],,[zyx以及,,[ϕψ[4]。
但这并不等于说,我们要把这6个自由度上的运动全部加以考虑。
数学模型是实际系统的简化,如何简化就有很大学问。
太复杂和精细的模型可能包含难于估计的参数,也不便于分析。
过于简单的模型不能描述系统的重要性能。
这就需要我们建模时在复杂和简单之间做合理的折中。
对于船舶运动控制来说,建立一个复杂程度适宜、精度满足研究要求的数学模型是至关重要的。
图6.1.1的坐标定义如下:0ZYXO-是惯性坐标系(大地参考坐标系)位置,0OX指向正北,OY指向正东,OZ指向地心;o-xyz正北为零度,沿顺时针方向取0︒~360︒;舵角δ以右舵为正。
闸室船舶组合优化动态模型

(. 1江苏省交通厅航道局, 江苏 南京 200 ; . 1 4 2河海大学商学院, 0 江苏 南京 209) 1 8 0
摘要: 基于心理学理论 , 对待 闸船舶提 出了极限等待时间的概念. 出将船舶按照特大型、 提 大型、 中 型、 小型设 立排 队队 列 , 并基 于 0—1 划 建立 闸 室船 舶组合 优化 动 态模 型 . 规 以泰 州船 闸某一 天上行 过 闸为例 , 应用闸室船舶组合优化动态模型对其进行优化调度. 结果表明, 优化后总闸次数、 平均每 闸吨位、 船舶平均待闸时间、 平均闸室利用率等指标比优化前均有了不同程度的改善 .
b 优先服务方式 . . 对符合优先过闸条件的船舶 , 按照“ 优先服务” 的原则提前调度过闸 , 如在苏北运河上
的电煤船舶享有优先过闸的权利 .
c 单独服务方式 . . 对符合单独过闸条件的船舶 , 按照“ 单独服务” 的原则单独过 闸, 如在苏北运河上的危
险品船舶基本实行单独过闸. d 限时服务方式 . . 确定各种船型能够忍耐的“ 极限等待时间”一旦船舶的等待时间超过最大待 闸时间, , 就必须安排船舶尽快过闸 . 上述前 3 种方式都是传统的方式 , 比较容易理解 , 对于第 4种方式 , 可通过心理学的知识予 以解释 . 心理 学的研究成果表明, 无所事事的等待 、 过程前过程后的等待 、 焦虑的等待等感觉等待时间会更长 . 船舶在过闸 过程中, 民基本处于无所事事的等待、 船 过程前( 过闸前) 的等待 、 焦虑 的等待 , 这就会使船民处于极度烦躁的
模 型是 按 闸次进 行优 化 的 .
1 船舶排 队规则设计
在船闸运行调度管理过程中 , 当船舶到达船闸不能及时通过时 , 就可能形成船舶排 队等候过闸的现象 . 因此 , 必须预先设定好排队规则 .
船舶规划与调度问题的数学建模与求解

船舶规划与调度问题的数学建模与求解一、引言船舶规划与调度问题一直以来都是航运业面临的重要挑战之一。
船舶规划与调度的优化,可以大大提高船舶运输效率和运营管理水平,降低成本,提高利润。
数学建模与求解方法在船舶规划与调度中发挥着重要作用。
本文将重点介绍船舶规划与调度问题的数学建模与求解方法。
二、问题描述船舶规划与调度问题可以分为船舶路径规划和船舶调度两个方面。
船舶路径规划是指在给定的航线网络中确定船舶的最优路径,使得航程最短、成本最低、时间最早,同时满足一定的约束条件。
船舶调度是指在给定的船舶和港口资源情况下,合理安排船舶到达、停靠、出发和停泊等活动,以最大限度地提高资源利用率。
三、数学建模1. 船舶路径规划的数学建模船舶路径规划的目标是使得船舶的航程最短。
为了实现最短航程,可以采用图论中的最短路径算法,如Dijkstra算法、Bellman-Ford算法和A*算法等。
在该数学建模过程中,需要将船舶的航线网络抽象为一个图,图中的节点表示港口,边表示港口之间的航线。
根据输入的起点和终点,利用最短路径算法求解最优路径。
2. 船舶调度的数学建模船舶调度的目标是合理安排船舶活动,以最大限度地提高资源利用率。
船舶调度可以用图论中的匹配问题来建模和求解。
在该数学建模过程中,需要将船舶和港口资源抽象为图中的节点,同时考虑船舶与港口之间的关系抽象为图中的边。
通过求解最大匹配问题,可得到一个合理的船舶调度方案。
四、求解方法1. 船舶路径规划的求解方法在船舶路径规划中,可以采用启发式算法和元启发式算法等求解方法。
启发式算法主要通过启发式规则对问题进行逼近求解,并通过搜索算法来寻找最优解。
常见的启发式算法有遗传算法、模拟退火算法和粒子群算法等。
元启发式算法是一种综合多种启发式算法的求解方法,通过多种启发式算法的组合来得到更优的解决方案。
2. 船舶调度的求解方法在船舶调度中,可以采用数学规划方法和模拟仿真方法等求解方法。
数学规划方法主要通过线性规划、整数规划和混合整数规划等方法来求解船舶调度问题。
船闸工作原理及过程

船闸工作原理及过程引言概述:船闸是一种水利设施,用于调节水位,使船只能够顺利通过水道。
船闸的工作原理和过程是船舶运输中至关重要的一环。
本文将详细介绍船闸的工作原理及过程,以帮助读者更好地理解船闸的运作机制。
一、船闸的工作原理1.1 水位调节原理船闸通过调节进出水门的开启程度,控制水流的流入和流出,从而调节水位。
当船舶需要通过船闸时,进水门打开,水流进入船闸,使水位上升至与上游水位相等;待船舶通过后,出水门打开,水流从船闸中流出,使水位恢复到与下游水位相等。
1.2 压力平衡原理船闸中设有上下游两个水池,通过进出水门的开闭控制水流,从而实现水位的调节。
当进出水门关闭时,船闸中的水形成一个封闭的系统。
根据物理原理,液体在封闭容器中会形成一个平衡状态,即上下游水池中的水压力相等,从而保持水位的稳定。
1.3 动力传递原理船闸的进出水门通常由液压系统控制。
液压系统通过液压泵将液体压力转化为机械能,推动进出水门的开闭。
液压系统的工作原理是利用液体不可压缩的特性,通过改变液体的压力来传递力量,从而实现船闸进出水门的运动。
二、船闸的工作过程2.1 船舶进入船闸当船舶需要通过船闸时,首先需要等待进水门打开。
进水门打开后,船舶驶入船闸,进入船闸后,进水门关闭,防止水流流出。
2.2 船闸水位调节进水门关闭后,船闸开始进行水位调节。
通过调节出水门的开启程度,控制水流的流出,使船闸内的水位逐渐上升,直至与上游水位相等。
2.3 船舶通过船闸当船闸内水位与上游水位相等时,船舶可以开始通过船闸。
船舶驶离船闸后,出水门打开,控制水流的流出,使船闸内的水位逐渐恢复到与下游水位相等。
三、船闸的优点3.1 节约水资源船闸通过调节水流的流入和流出,使水位保持稳定,避免了水资源的浪费。
相比于传统的水闸系统,船闸能够更加高效地利用水资源。
3.2 提高船舶通行效率船闸的工作原理使得船舶能够顺利通过水道,避免了船只在水闸内等待的时间,提高了船舶通行的效率。
港务船舶调度中的自动化技术应用

港务船舶调度中的自动化技术应用随着信息技术的发展和航运业务的不断增长,港务船舶调度已经成为一个巨大的挑战。
为了提高调度效率和准确性,港务行业已经开始广泛应用自动化技术。
本文将深入探讨港务船舶调度中的自动化技术应用。
自动化技术在港务船舶调度中发挥着重要的作用。
首先,自动化技术可以实现全天候监控和数据采集,提供实时信息。
通过传感器和监控系统,港务管理者能够获取船舶位置、状态、货物运载量等各种信息,从而做出准确的调度决策。
这种实时监控和数据采集的能力大大提高了港口的运行效率,并避免了人为错误。
其次,自动化技术可以优化港口资源分配。
通过智能调度算法和优化模型,港口管理者可以更好地规划航线、泊位和装卸设备的使用,以最大限度地提高资源利用率。
这种自动化的资源分配可以减少拥堵、缩短等待时间,并提高船舶装卸效率,从而降低港口运营成本。
此外,自动化技术还可以提高港口的安全性和环境可持续性。
自动化的船舶调度系统可以减少人为错误和事故风险,从而提高港口的安全性。
同时,通过优化船舶的路径和速度,自动化技术还可以减少船舶的燃油消耗和排放,达到环境保护的目的。
要实现港务船舶调度中的自动化技术应用,有一些关键技术和挑战需要解决。
首先,需要建立一个可靠的通信网络,以保证各个设备的数据传输和信息交换。
这需要确保高速、稳定的网络连接和适当的网络安全措施。
其次,需要开发智能的调度算法和优化模型。
这些算法和模型应该能够根据船舶的实际情况和动态变化来做出准确的调度决策,并具有一定的自适应性和预测能力。
另外,还需要研发高精度的位置定位和监测技术。
仅凭人工操作是无法实现船舶的精确定位和监测的,需要依靠定位系统、传感器和监控设备来实现。
此外,需要推动航运行业的数字化转型。
港务船舶调度中的自动化技术需要与船舶和货物的信息化管理系统相结合,实现信息的无缝对接和数据的共享。
最后,还需要关注人员培训和技术支持。
尽管自动化技术可以提高运营效率,但操作人员的培训和技术支持也是不可忽视的。
港务船舶调度的数据分析和可视化展示

港务船舶调度的数据分析和可视化展示引言:港务船舶调度是港口管理中的重要环节,通过对港区水域内船舶的调度和管理,可以提高港口的运转效率和安全性。
随着信息技术的发展和应用,数据分析和可视化展示成为了港务船舶调度的重要工具,可以帮助港口管理者更好地了解港区水域内的船舶动态,优化港口资源分配,提高工作效率。
一、数据收集和整理港务船舶调度的数据包括船舶的位置、航速、航向、载货量以及其他相关信息。
为了进行数据分析和可视化展示,首先需要收集并整理这些数据。
数据可以通过各种传感器、监控设备和船舶自身的系统获得,如全球卫星定位系统(GPS)、自动识别系统(AIS)等。
在收集数据的同时,还需要进行数据清洗和整理。
这个过程包括去除重复数据、填补缺失值、校正异常值等。
清洗和整理后的数据才能为后续的分析和展示提供准确和可靠的基础。
二、数据分析数据分析是将收集到的数据进行统计和计算,从中提取出有价值的信息。
在港务船舶调度中,数据分析可以帮助了解船舶的运行情况、调度效率以及港口资源的利用率,为港口管理者提供决策支持。
1. 船舶运行情况分析通过对船舶的位置、航速、航向等数据进行分析,可以了解船舶的运行轨迹和速度变化,判断船舶是否按照预定航线和速度行驶。
同时,还可以分析船舶的停靠时间和停靠位置,了解船舶在港口内的活动情况。
2. 调度效率分析调度效率是衡量港务船舶调度系统效能的重要指标,通过对船舶调度数据进行分析,可以评估调度系统的效率,并发现潜在的问题和瓶颈。
比如,可以分析船舶的等待时间,判断是否存在拥堵情况;可以分析船舶的装卸效率,评估工作流程的优化空间。
3. 资源利用率分析港口资源的合理配置和利用是港务船舶调度的核心问题之一。
通过对船舶调度数据的分析,可以评估港口资源的利用情况,如泊位的使用率、航道的通行能力等。
同时,还可以分析船舶的货物载重量,评估港口的货物吞吐能力。
三、可视化展示数据分析结果的可视化展示可以帮助人们更直观地理解数据,发现规律和趋势。
智慧船闸架构模型设计

水位数据 : 船闸上下游,闸室的三级水位数值。 专项水位数据 :水位计测量获取,通过 PLC 设备或 RTU 设备获取水位数值。 公共水位数据 :视频监控设备拍摄水尺获得 ;互联网 获取。 船舶数据 :船名、船号、船舶尺寸、速度、载重、货 物、定位、起讫点。 专项船舶数据来源 :船民申报系统、AIS 通信、雷达 扫描。 公共船舶数据来源 :视频监控系统图像识别获取 ;互 联网获取。 船闸数据 :静态数据、动态数据。 静态数据 :船闸基本尺寸数据,沉降位移数据 ;闸门 跳动量、配电接地电阻等数据。 动态数据 :闸门、阀门运转件实时数据、泵站运行实 时数据、控制运行数据、配电系统数据、网络通信数据。 静态船闸数据来源 :人工录入。 动态专项船闸数据来源 :集合门机电传感器,主要从
与 4 类数据紧密相连的系统或者设备有水位计设备、 PLC 控制系统、视频监控系统、船民申报 App、船舶定位 AIS 装置等。
船闸和服务对象交互,提供服务的系统主要有控制系 统、运维系统、与船民通信的 App、广播和大屏等设施。
根据以上论述,结合船闸主要运行系统,可形成如图 3 所示的船闸智慧体构建样式。
- 92 -
图 2 智慧船闸的发展历程图
工业技术
2021 NO.4(下) 中国新技术新产品
智慧生命体的神经系统,由脑神经、脊神经、植物性 神经组成。神经的作用是控制与调节生命体各器官、系统 的活动,使生命体成为一个统一的整体 ;另一方面通过神 经系统分析,使机体对环境变化的刺激做出相应的反应, 达到机体与环境的统一。
船闸运行调度工作总结汇报

船闸运行调度工作总结汇报船闸运行调度工作总结汇报一、工作内容在过去的一年里,我作为船闸运行调度员,主要负责船闸的日常运行调度工作。
具体工作内容包括但不限于以下几个方面:1. 船舶通行管理:负责监控船舶的进出闸情况,确保船舶通行的安全和顺畅。
及时与船舶进行沟通,并根据不同船舶的情况和需求,合理安排船闸的开启和关闭时间。
2. 水位控制管理:根据水文监测数据和气象预报信息,及时调整船闸的开闸水位和关闸水位,确保船舶能够安全通过,并避免因水位过高或过低而导致的事故。
3. 闸室设备维护:定期对闸室设备进行检修和维护,确保船闸的正常运行。
如果发现设备故障或异常情况,及时进行处理,以免对船舶通行造成影响。
4. 船闸运行数据统计与分析:对船舶通行的相关数据进行统计和分析,制定相应的运行计划和调度措施。
通过对数据的分析,不断优化船闸运行调度工作,提高效率和服务质量。
二、工作亮点在过去一年的工作中,我注重提高自身技能和专业知识,积极参加相关培训和学习,使自己不断成长和进步。
同时,我也在工作中积极与船舶公司、港湾部门和其他相关单位保持良好的沟通合作,促进工作的顺利进行。
1. 提高船舶通行效率:通过优化船闸开关的时间和频率,减少等待船舶的时间,提高了船舶通行的效率。
同时,结合船舶通行数据进行分析,及时调整调度方案,缩短船舶通行时间,提高通行能力。
2. 保障船舶通行安全:通过及时了解船舶的情况和需求,有效安排船闸的开关时间,确保船舶能够安全通过。
在通航过程中,密切关注气象预报,掌握河道水位变化,及时调整船闸水位,避免因水位过高或过低而造成的不安全因素。
3. 加强调度团队合作:与船闸调度团队成员保持密切联系,及时沟通和交流工作中的问题和难点。
建立和谐的工作氛围,统一目标,共同努力,提高整个调度团队的工作效率和服务质量。
三、存在的问题和改进措施尽管在工作中取得了一定的成绩,但也面临着一些问题和挑战。
主要问题包括但不限于以下几个方面:1. 设备老化问题:部分船闸设备存在老化和损坏的情况,对船闸的正常运行造成了一定的影响。
船闸运营调度管理是什么

船闸运营调度管理是什么船闸运营调度管理是指对船闸运营过程中的船舶和水位进行调度和管理的一种综合性工作。
船闸是连接两个水平面不同的水道的设施,用于调节水位,并让船只通过。
船闸运营是水运系统中重要的环节之一,它涉及到船只的通行安全、水位的稳定调控、船闸设备的维护保养和运营效率的提升等多个方面。
船闸运营调度管理的目标是确保船只顺利通过船闸,保障水运系统的正常运营。
船闸运营调度管理的内容船闸运营调度管理包括以下几个主要内容:1. 船舶调度管理船舶调度管理是船闸运营调度管理中的关键部分之一。
它通过合理安排船舶的进出时间和通行顺序,以最大程度地提高船闸的通行效率。
船舶调度管理需要考虑船舶的数量、类型、尺寸、货物种类等因素,并综合考虑船闸的通行能力、水位、船舶运行速度等因素,制定合理的调度计划。
2. 水位调节管理水位调节是船闸运营调度管理中的另一个重要内容。
船闸的运行需要根据水位的变化进行调整。
水位调节管理包括通过水闸控制水位升降,保持航道的航深,确保船只的安全通行。
水位调节管理还需要考虑到下游的人工引水、降水等因素,综合考虑船舶通行和治理河道的需求,制定合理的水位调节计划。
3. 设备维护管理船闸设备的正常运行对船闸运营调度管理至关重要。
设备维护管理包括设备的巡检、保养、维修和更新等方面。
通过定期巡检和保养,及时发现设备的故障和问题,确保设备的正常运行。
对于老旧的设备,还需要进行更新和改造,提升设备的运行效率和安全性。
4. 运营效率提升管理船闸运营调度管理还需要关注运营效率的提升。
通过改进管理机制、优化流程和技术手段,提高船闸运营的效率和水平。
运营效率提升管理包括对运营数据的分析和监测,及时发现运营问题和瓶颈,并制定相应的改进方案。
另外,还可以利用信息化技术,实现船闸运营调度的自动化和智能化,提高运营决策的科学性和准确性。
船闸运营调度管理的意义船闸运营调度管理对于水运系统的运营安全和效率至关重要。
它能够帮助优化航运资源的配置,提高船只通行的效率,最大限度地降低航运成本。
船舶编队过闸航行三维实时仿真

船舶编队过闸航行三维实时仿真
李松龙;柳晨光;初秀民;贺治卜
【期刊名称】《中国航海》
【年(卷),期】2022(45)3
【摘要】多船编队自动协同过闸是一种能深入挖掘船闸通航潜能、保障航行安全的航运新模式。
为评估和验证船舶编队过闸航行控制效果,研发了一种船舶编队过闸航行三维实时仿真系统。
首先,设计了船舶编队过闸航行三维仿真系统分布式架构,结合船闸水域卫星图并利用映射技术构建了船闸水域场景地形,制作了基于Unity的船闸水域三维仿真静态和动态场景。
其次,采用动态和静态模型相结合方式构建了船闸运行系统,并根据船舶自身尺度和船闸宽度等条件实时计算船舶编队状态,实现了船舶纵向、横向编队全过程三维实时动态仿真。
最后,以船舶自适应巡航编队航行和多船双向编队过闸航行为验证实例,对船舶编队过闸航行三维实时仿真系统分别进行了验证,结果表明本系统能实时动态模拟船舶编队过闸全过程,并准确计算船舶编队过闸航行状态,可为未来实现船闸水域船舶编队航行提供重要的基础平台支撑。
【总页数】8页(P129-136)
【作者】李松龙;柳晨光;初秀民;贺治卜
【作者单位】武汉理工大学国家水运安全工程技术研究中心;武汉理工大学智能交通系统研究中心;武汉理工大学交通与物流工程学院;闽江学院
【正文语种】中文
【中图分类】U641.7;U664.82
【相关文献】
1.内河船舶航行环境视景三维仿真
2.三峡库区航行船舶实时三维仿真监控系统
3.基于船舶航行仿真的吴淞口建闸方案优化
4.内河船舶航行三维仿真关键技术研究
5.基于船舶六自由度运动的船舶航行安全实时监控系统研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5 1 0 0 0 6 )
【 摘 要】 研究船舶 动态监控下 的船 闸调度优化问胚 , 在船舶动态监控 系统 的辅助下可获得未来 T 期 内船舶到闸的数据。 在考 虑 过闸安全性 的前提下把船舶划分为四个组 , 把船 闸的调度 问题建模为分组调度优化问题。基于船舶动态数据 , 在制定 当前 闸期
盖安全性 、 便捷性等方面的 S E R V Q U A L模 型, 并基 于消息机制 对系统进行仿真 , 提 升了通航 能力 。船闸调度问题属于 N P难 题 , 无法通过数学解析得 到最优解 。常见 的调度 算法有启发
式调度算法 嘲 、 分 组调度算法嘲 、 排 队论 模型同 、 系统仿 真| 8 -  ̄ 1 、 多
S h i p Lo c k S c h e d u l i n g Mo d e l Ba s e d o n Ve s s e l Dy n a mi c s
Z h a ng Gu a n x i a ng , L i uYu a n y ua n , Cm W e n x ue , ZБайду номын сангаас o n gHu i l i n g
Abs t r a c t : I nt h i s pa p e r , c o n s i d e r i n gt h e s a f e t y l o c k o f t h e s h i p , wed i v i d e di t i n t o f o u r g r o u ps , t u r n i n g t h e s h i pl o c k s c h e d u l i n gp r o b l e mi n t oa
Ke y wo r ds : s h i p l o c k s c h e d u l i n g ; d y n m i a c mo n i t o r i n g ; p a c k e t s c h e d u l i n g ; l o c l a e n u me r a t i o n
多 的研究 是基于 多个 目标 的组合 优化 , 文 献[ 3 】 提 出 了一 种涵
1 引 言
船 闸是改善水路运输 条件 、 提 高航 道等级 、 保 障船舶运输 安全 的重要基础设施之 一 , 在我 国经济 发展 中具有重大作 用。 随着水路运输量及运输货 物种类的不断增加 ,船 舶的过闸等 待时 间越来越长 ; 船舶及货物 的类 型众多 , 在 过闸时同处于一 个狭窄 的空 间, 容易引发安全 问题 : 如何在安 全条 件下提高船
s y s t e ms d u r i n g a p e r i o d o f T, t h e l o c a l o p t i ma l s o l u t i o n wi l l b e l f S a s c h e d u l i n g s c h e me o f t h e s y s t e m. T h e e x a mp l e a n a l y s i s r e s u l t s s h o w e d t h a t t h e p op r o s e d s c h e d u l i n gmo d lb a a s e do np a r t i a l e n u me r a t i o nc o u l dg e t b e t t e r p e r f o r ma n c e f r o mt he s y s t e m.
( S c h o o l o f E c o n o mi c s &T r a d e , S o u t hC h i n a U n i v e r s i t y o f T e c h n o l o g y , Gu a n g z h o u 5 1 0 0 0 6 , C h i n a )
的调 度方 案时, 通过枚举未来 T期 内所有可能的调度方案得到局部最优解 , 以此作 为系统 的调 度方案。算例分析的结果表 明, 基 于局 部枚举 的调度模型能够获得更优的系统性 能。 【 关键词】 船闸调度 ; 动态监控 ; 分组调度 ; 局部枚举 【 中图分类号F5 5 2 ; T P 2 7 7; U 6 4 1 . 7 【 文献标识码】 A 【 文献编号1 1 0 0 5 — 1 5 2 x( 2 o 1 5 ) 0 8 f 2 ) 一 0 1 5 9 — 0 4
张冠湘, 等: 基于船舶动态的船闸调度模型
d o i : 1 0 . 3 9 6 9 4 . i s s n . 1 0 0 5 - 1 5 2 X . 2 0 1 5 . 0 8 ( 2 ) . 0 4 4
技 术 与 方 法
基于船舶动态 的船 闸调度模型
张冠湘 , 刘园园 , 蔡文学 , 钟 慧 玲 ( 华南 理工大学 经济与贸易学院 , 广东 广州
船闸联合调 度l l 0 1 等。 随着通讯技术的不断 发展 及国家对 内河运输 船舶 监管要
求的提高 , 船舶监控系统得到 了广泛的应用l J l 】 。船舶监控系统 可 以获得在指定水域 内船舶 的航行 速度 、 位置 等信息 , 也即可