智能车磁导航中的信号调理电路设计
电磁组智能车恒磁式20KHZ信号源设计导图
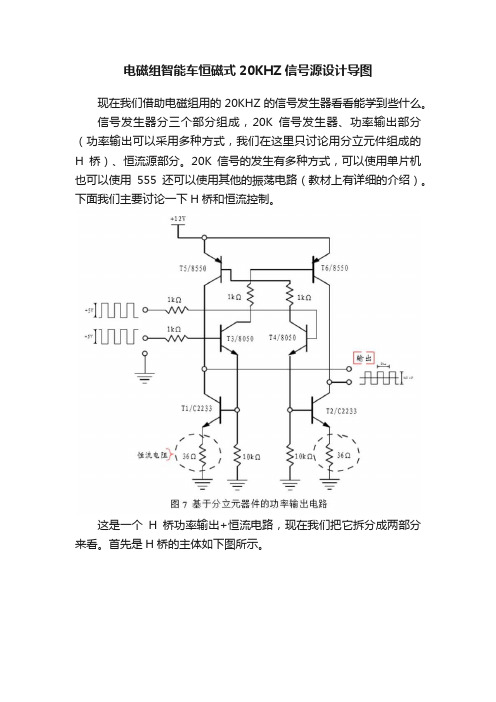
现在我们借助电磁组用的20KHZ的信号发生器看看能学到些什么。
信号发生器分三个部分组成,20K信号发生器、功率输出部分(功率输出可以采用多种方式,我们在这里只讨论用分立元件组成的H桥)、恒流源部分。
20K信号的发生有多种方式,可以使用单片机也可以使用555还可以使用其他的振荡电路(教材上有详细的介绍)。
下面我们主要讨论一下H桥和恒流控制。
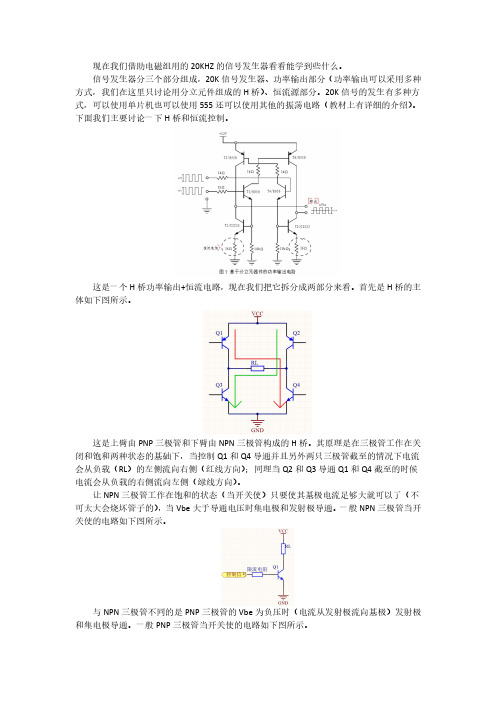
这是一个H桥功率输出+恒流电路,现在我们把它拆分成两部分来看。
首先是H桥的主体如下图所示。
这是上臂由PNP三极管和下臂由NPN三极管构成的H桥。
其原理是在三极管工作在关闭和饱和两种状态的基础下,当控制Q1和Q4导通并且另外两只三极管截至的情况下电流会从负载(RL)的左侧流向右侧(红线方向);同理当Q2和Q3导通Q1和Q4截至的时候电流会从负载的右侧流向左侧(绿线方向)。
让NPN三极管工作在饱和的状态(当开关使)只要使其基极电流足够大就可以了(不可太大会烧坏管子的),当Vbe大于导通电压时集电极和发射极导通。
一般NPN三极管当开关使的电路如下图所示。
与NPN三极管不同的是PNP三极管的Vbe为负压时(电流从发射极流向基极)发射极和集电极导通。
一般PNP三极管当开关使的电路如下图所示。
通过观察这两个开关电路可以发现NPN三极管开关电路的负载比三极管更靠近电源正极,而PNP三极管开关电路的负载比三极管更靠近地。
为什么要这么做呢,如果放反了会怎么样呢,以NPN三极管为例。
我们都知道NPN三极管正常工作时发射极电位是小于基极电位的,所以上图电路中的三极管是工作在放大状态下的。
这个电路的好处在于基极电流很小(输入阻抗很大),基极电流近似等于(基极电压-导通电压)/负载电阻/β。
在共集放大电路(在学习共集放大电路的时候不妨也顺便看看共基放大电路)和推挽电路中会看到它的身影。
这个电路稍微改造一下就变成了一个最简单的(之一吧)恒流源。
流过负载电阻RL的电流近似恒定为(Vref-导通电压)/Rfb。
基于电磁导航智能车的系统设计与开发

2019年第18期信息与电脑China Computer & Communication软件开发与应用基于电磁导航智能车的系统设计与开发盛 楠(合肥财经职业学院,安徽 合肥 230601)摘 要:在当今汽车产业迅速发展以及人们对汽车智能化的需求日益增加的背景下,对智能车的研究成为自动控制领域内的研究热点。
智能汽车是种集环境感知、决策规划、自动行驶等综合功能于一体的综合智能系统,其应用涉及了诸如自动控制技术、模式识别、计算机视觉效果、传感器技术、电子与电气工程和单片机应用等众多学科的知识。
关键词:智能车;电磁导航;信号采集与处理;自动寻迹中图分类号:TP23 文献标识码:A 文章编号:1003-9767(2019)18-094-02System Design and Development Based on Electromagnetic NavigationIntelligent VehicleSheng Nan(Hefei College of Finance and Economics, Hefei Anhui 230601, China)Abstract: With the rapid development of the automobile industry and the increasing demand for intelligent vehicles, the researchon intelligent vehicles has become a hot topic in the field of automatic control. Intelligent vehicle is a kind of integrated intelligent system which integrates environmental perception, decision-making planning and automatic driving. Its application involves many subjects such as automatic control technology, pattern recognition, computer vision effect, sensor technology, electronic and electricalengineering and single-chip computer application.Key words: smart car; electromagnetic navigation; signal acquisition and processing; automatic tracing1 智能车电磁导航技术电磁导航技术的主要原理就是电磁感应,通过电磁感应的方式可以将一个具体空间中的磁场分布很好地确定下来,通过磁场分布来确定车辆位置。
电磁导航式智能车传感器模块的设计与实现

2系统 描 述 .
:
/ 工
I l I
。
撕蹴
铽
.
பைடு நூலகம்
女 雠
起
跑 £ 爱
长 皮
'
盘霸 量 邕£
@
一 一 ~ 、
、
、
一 ,
,
、
、 一 ,
.
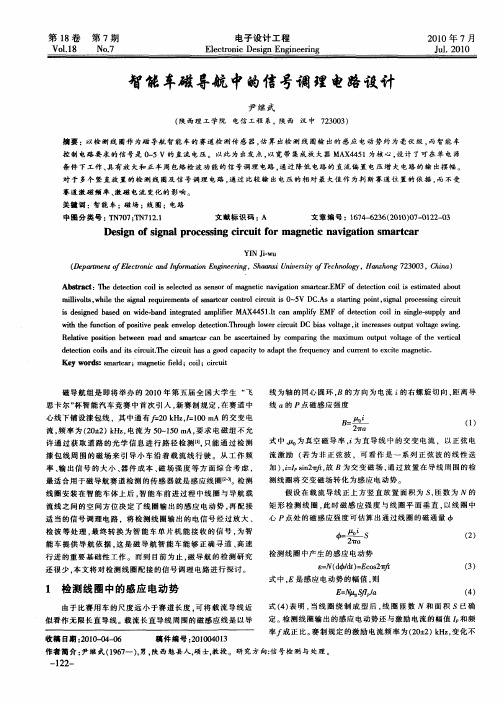
图l 道路环境示意 图 给定道路如图 1 所示 , 宽度 为 5 e 中间铺设一条引导线 , 0 m, 导线通 有 5 — 5 m 频率为 2 K±2 0 10 A、 0 K的交变 电流 , 电流会在 周围空间产生 该 交变 电磁场 , 另外设置起止线下方左右两边各有三块磁钢 。 要求智能车 能够 跟踪地 面引导线高速运 动 , 同时识别 引导线 的变化 , 遇到弯道 、 十 字交叉等能够正确应对 , 测到起止线能及时停车 。 根据 以上要求 ,设计传感器模 块包括引导线检测和起止线 检测两 个子模块 , 分别实现导航信号跟踪 以及遇起止线 自动停车功能。 引导线 所产生 的交变 电磁场信息采用 电感 元件检测 ,从而获取智能 车在道 路 上的左右偏差 , 并及时调整 。起止线信 息采 用霍尔传感器检测 , 到信 测 号立即控制智能车停止。 3传 感器模块 电路设计 . 稳压电源是传感器模块稳定工作 的基 础 ,本设计中霍尔传感器 的
电磁组智能车恒磁式20KHZ信号源设计导图
电磁组智能车恒磁式20KHZ信号源设计导图现在我们借助电磁组用的20KHZ的信号发生器看看能学到些什么。
信号发生器分三个部分组成,20K信号发生器、功率输出部分(功率输出可以采用多种方式,我们在这里只讨论用分立元件组成的H桥)、恒流源部分。
20K信号的发生有多种方式,可以使用单片机也可以使用555还可以使用其他的振荡电路(教材上有详细的介绍)。
下面我们主要讨论一下H桥和恒流控制。
这是一个H桥功率输出+恒流电路,现在我们把它拆分成两部分来看。
首先是H桥的主体如下图所示。
这是上臂由PNP三极管和下臂由NPN三极管构成的H桥。
其原理是在三极管工作在关闭和饱和两种状态的基础下,当控制Q1和Q4导通并且另外两只三极管截至的情况下电流会从负载(RL)的左侧流向右侧(红线方向);同理当Q2和Q3导通Q1和Q4截至的时候电流会从负载的右侧流向左侧(绿线方向)。
让NPN三极管工作在饱和的状态(当开关使)只要使其基极电流足够大就可以了(不可太大会烧坏管子的),当Vbe大于导通电压时集电极和发射极导通。
一般NPN三极管当开关使的电路如下图所示。
与NPN三极管不同的是PNP三极管的Vbe为负压时(电流从发射极流向基极)发射极和集电极导通。
一般PNP三极管当开关使的电路如下图所示。
通过观察这两个开关电路可以发现NPN三极管开关电路的负载比三极管更靠近电源正极,而PNP三极管开关电路的负载比三极管更靠近地。
为什么要这么做呢,如果放反了会怎么样呢,以NPN三极管为例。
我们都知道NPN三极管正常工作时发射极电位是小于基极电位的,所以上图电路中的三极管是工作在放大状态下的。
这个电路的好处在于基极电流很小(输入阻抗很大),基极电流近似等于(基极电压-导通电压)/负载电阻/β。
在共集放大电路(在学习共集放大电路的时候不妨也顺便看看共基放大电路)和推挽电路中会看到它的身影。
这个电路稍微改造一下就变成了一个最简单的(之一吧)恒流源。
流过负载电阻RL的电流近似恒定为(Vref-导通电压)/Rfb。
智能车电路图整理,总结.

(1)驱动电路:以下是BTS 7960全桥的接线电路,同样适用于BTS(BTN)7960 7970等。
BTN比BTS性能更强。
A车用两片做驱动就够了,不需要像下图那样用四片,四片B车模才需要。
BTS7960芯片引脚简绍1脚(GND);2脚(IN)PWM输入-0.3~5.3V;3脚(INH)使能1有效0进入睡眠模式;4脚(OUT)半桥驱动功率输出;5脚(SR)Slew Rate转换速率,通过在SR和GND之间接入一个电阻可以调整转换速率,电阻越大,上升下降越慢;6脚(IS)输出脚电流传感器和故障诊断输出;7脚(VS)VCC供电-0.3~45V。
这是工作原理,可以不看。
BTS7960的芯片内部为一个半桥。
INH引脚为高电平,使能BTS7960。
IN引脚用于确定哪个MOSFET导通。
IN=1且INH=1时,高边MOSFET导通,OUT引脚输出高电平;IN=0且INH=1时,低边MOSFET导通,OUT引脚输出低电平。
SR引脚外接电阻的大小,可以调节MOS管导通和关断的时间,具有防电磁干扰的功能。
IS引脚是电流检测输出引脚。
BTS7960的引脚IS具有电流检测功能。
正常模式下,从IS引脚流出的电流与流经高边MOS管的电流成正比,若RIS=1kΩ,则V=I load/8.5;在故障条件下,从IS引脚流出的电流等于I IS(lim) (约IS4.5mA),最后的效果是IS为高电平。
如图4所示,图(a)为正常模式下IS引脚电流输出,图(b)为故障条件下IS引脚上的电流输出。
BTS7960短路故障实验的实验条件如下:+12.45V电池电压,+5V 电源供电,2.0m短路导线(R=0.2Ω),横截面积为0.75 mm,连接1kΩ电阻和一个发光二极管。
V S与电池正极间导线长1.5m (R=0.15Ω)。
如图5所示,其中V IS是IS引脚对地的电压、V L 是OUT引脚对地电压,I L为发生对地短路故障时,流过BTS7960的短路电流。
基于磁场导航智能车控制器的设计

基于磁场导航智能车控制器的设计学校:专业:电气工程及其自动化带队教师:参赛队员:第一章前言 (3)第二章方案论证 (4)第三章整体设计思路 (5)1)、磁场检测原理2)、系统整体结构3)、定磁场放大电路4)、交变磁场放大电路第四章单元电路 (10)1)、单片机最小统2)、速度传感器模块3)、磁场检测模块4)、电机驱动模块5)、舵机驱动模块6)、LCD显示模块第五章软件设计 (18)第七章结论 (21)附页在智能导航系统中,如无人驾驶飞机、无人驾驶汽车,目前较为常用的导航方式为GPS导航。
而地球磁场的大小和方向是任何人改变不了的,因此如何利用磁场导航具有很高的研究价值。
磁导航智能车根据多给交变的磁场信息或是根据无法人为改变的地球磁场来判断方向及大小,自行达到预期的目标并完成导航任务。
当今机器人技术发展如火如荼,其应用已涉及包括国防等众多领域,工业自动化,神五、神六升天,无人探月飞船……无不得益于机器人技术的飞速发展。
智能小车应该说是最基本的机器人雏形,智能小车控制系统的研制将有助于推动智能机器人等智能控制系统的发展。
实时采集传感器信号,智能分析外部环境、路径信息,自动实现方向控制及速度调节,是智能小车控制的主要特点,其设计内容涵盖机械、汽车、电子、自动控制、计算机、传感器技术等多个学科的知识领域。
作为一门新兴的综合技术,可广泛应用于工厂自动料车、固定场地搬运车等技术领域,具有良好的应用前景。
本文设计一智能车,能够检测有磁引导的轨迹识别,及自行检测当前地磁场.在有磁导航线路时,可跟踪线路磁场,自动寻找轨迹,并迅速或按照规定速度前进.在水平面内确定方位角,当接受到位置坐标和速度等命令后,智能车可再不受人干预的情况下,自行到达目标位置.实现对特定磁导航的智能循迹和地磁场的方位角的测定,以实现水平面内的定位,用以实现导航.第二章方案论证该项目的研究内容为首先对磁场导航相关的理论进行分析,根据所分析的理论设计导航模型。
任务书三轴磁罗盘的信号调理电路设计

中北大学信息商务学院毕业设计任务书学院、系:信息商务学院电子与计算机科学技术系专业:微电子学学生姓名:刘佳文学号:08060241X01 设计题目:三轴磁罗盘的信号调理电路设计起迄日期: 2011年 10月10日~2012年6月15日设计地点:中北大学先进制造中心指导教师:张晓明系主任:杨秋翔发任务书日期: 2011年10月10日任务书填写要求1.毕业设计任务书由指导教师根据各课题的具体情况填写,经学生所在系的负责人审查、签字后生效。
此任务书应在毕业设计开始前一周内填好并发给学生;2.任务书内容必须用黑笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网页上下载)打印,不得随便涂改或潦草书写,禁止打印在其它纸上后剪贴;3.任务书内填写的内容,必须和学生毕业设计完成的情况相一致,若有变更,应当经过所在专业及系主管领导审批后方可重新填写;4.任务书内有关“学院、系”、“专业”等名称的填写,应写中文全称,不能写数字代码。
学生的“学号”要写全号(如02011401X02),不能只写最后2位或1位数字;5.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。
如“2004年3月15日”或“2004-03-15”。
毕业设计任务书1.毕业设计的任务和要求:磁罗盘是一种基于重力场和地磁场的姿态测量系统,但磁罗盘的信号输出并不能够直接进行数据采集,必须事先进行信号调理。
因此要求对磁罗盘进行调理电路设计并优化。
本课题要求:(1)根据A/D采集的要求,调理信号到可采集范围内;(2)利用滤波对信号进行优化处理;(3)将电路板小型化。
2.毕业设计的具体工作内容:1 学习磁罗盘工作原理与传感器信号调理方法;2 根据现有磁传感器和加速度计指标,设计相应信号调理外围电路;3 利用Protel软件设计电路原理图与PCB版图,制版并完成硬件电路的焊接与调试;4 实际测量实验,要求信号调理后输出范围为0~5V,并测量系统噪声、灵敏度及零偏等指标;5 翻译相关英文文献发挥:小型化电路板,尺寸达到30mm*20mm以下。
磁导航智能车系统的设计与实现

① 磁场信号检测 可分 为交 变磁 场检 测和恒 定磁 场检测 , 前者用来检测轨道 , 后者用来检测起始线 。交 变磁场检测是检测轨道 中交变 电流产 生的交 变磁场 , 可分为选频 、 放大和检波三个部分。选频 部分采用 L C 振荡 电路 , 用来 提取给定频率 的磁场信号 ; 放大部分采
磁 导航智能车系统的设计与 实现
王元哲 , 等
磁 导航 智能车 系统 的设计 与实现
De in a d Re la in o h sg n ai to ft e SmatM a n t vg t n Ca y t m z r g e i Na iai rS s e c o
1 系统 的 总体设 计
磁导航智能车通过感应外界磁场环境 的变 化来获 取路径信息 , 从而通过舵 机和 电机对 车辆进行 方 向和
速度 的控制 , 达到 自主寻迹 的 目的。根 据系统 所需实
鉴于磁导航技术 的实用 价值 , 飞思 卡尔杯 全 国大 学生智能汽车竞赛于 2 1 0 0年新增 电磁组 比赛项 目, 其
用仪表用差动放大 电路 , 差动放 大 电路 的设计 原理如
图 2所 示 。
桥, 也可采用分立元件搭建 的 H桥式驱 动电路 。本 文 利用 分 立 元 件 搭 建 驱 动 电 路 , 中 M S E 其 O F T选 用
I F 25 驱动芯片选 用 I2 0 , R 30 , R 14 电机驱 动模块 原理如
2 3 电机 驱 动模 块 .
路径信息采集模块对 车辆 与轨道 的相对位置和车 辆 行驶状态进行检测 , 主要包括磁场信号检测 、 车辆姿
态检测和车速检 测三个部分 。各部分介绍如下 。
本文使用 R 3 0S S8 一T型号 的直 流 电机。该 电机在
磁导航智能车中的正弦波峰值检测电路设计

[ 柴晓路. b 8 】 we 服务 架构 与开放互操作 技 【 】 1 帕派佐格 罗. b ̄务原理和技术 f . 5 We } M1
[4 龚 赤兵. b 1】 We 开发 新体 验 : PNET AS .
术I . M1 北京: 清华大学 出版社, 0 . 2 2 0
发 实践 【 . M】 北京: 机械工业 出版社, 0 . 2 6 0
S r ie e v c 相关 规 范尽 快完 善 ,可见 【 张海藩. 7 】 软件工程 【 . MJ 北京: 民邮电 出 人 35MVC架构 与实 战【 . . M]电子 工业 出版 20 . 社, 0. 2 9 0 W b e v c 技 术 已经成 为企 业 中 版 社 ,06 e S r i e
号 ,而智能车控制电路需要05 — V的直流 电压信号 。以此为 出发 点, P E 5定 时器为核 心,设计 了一种正弦波峰值 检测电路。 . 55  ̄ N 先用电磁 线圈输出的正弦波产 生一个控制信 号,再用此控制信号触发采样保持器采样 ,最后保持并输 出当前正弦波峰值 电压。
通 过这 种方 法确保 了信号检测 的实 时性、准确性和实用性。
【 关键词 】智能车;磁导航 ;正 弦波 ;峰值检测
1 整体 电路 设计 框 图 . 要进行放大和 电压抬高运算。放大和 相电路,另一路送入采样保持 电路。 路,产生的方波送往多谐振荡电路, 作,产生一个窄脉宽的低 电位脉冲,
2 检 测 线 圈 中感 应 电 动 势 的 .
由于 赛 道 长 度 远 远 大 于 小 车 尺 寸 , 因 此 ,可 将 赛 道 中 心 线 处
带 来 了更 多 的利 益 , 当我 们 迈 步
程【 . M】 北京: 清华大学 出版 社, 0. 2 4 0 【] 昆仑 . bSri s 程 一 用 c≠ T 4陆 We evc 编 e ≠NE [2孙 勇 强, 丽 坤 . sa c ≠ Te文 . 1】 杨 Vi l ≠. u NE e
基于电磁传感器的智能车自主寻迹系统的设计(修改)
基于电磁传感器的智能车自主寻迹系统的设计师克王洪军李永科(军械工程学院光学与电子工程系,河北石家庄 050003)摘要:第五届全国大学生“飞思卡尔”杯智能竞速车竞赛增加了基于电磁信号的智能车路径识别方式。
本文主要介绍基于电磁检测传感器的能够自主识别道路的智能车,使其能够按照沿通有频率为20kHz,幅度为100mA交流电的导引线预先规定的路线行进。
关键词:飞思卡尔、电磁感应定律、LC选频放大电路、二极管检波The Design of System of Independent Search of Track Based on Electromagnetic Sensors SmartcarShi ke Wang Hong-jun Li Yong-ke(Optical and Electronic Engineering Department)Abstract: The way that recognise the path used electromagnetic signal is added in the fifths competition of freescale. One smartcar who can independently recognise the path by the electromagnetic sensors is described in this paper. This car can run along the wire which have alternating current of 20kHz and 100mA.Key words: freescale; Law of electromagnetic induction; LC selective frequency amplifier circuit; diode detector.0 引言“飞思卡尔”智能竞速车竞赛是教育部为了加强大学生能力和团队精神的培养而倡导举办的全国大学生科技竞赛。
磁导航智能车路径信息采集系统的设计与实现
Wang Yuanzhe1,2,Tan Yingzi1
(1 . School of Automation , Southeast University , Nanjing 210096 , China ; 2 . School of Automation Science and Electrical Engineering , Beihang University , Beijing 100191 , China)
Σ
Σ
Σ i=0
Σ
Σ Σ
4
Σ Σ
Σ Σ
xi
Σ i=0
Σ
Σ Σ
路径信息采集系统通过对路径的检测来获取路径 信息,从而对车体的方向和速度进行精确控制。 该系统 主要包括交变磁场检测、起始线检测和车体姿态检测三 个部分,其原理如图 1 中虚线框所示。 2.1 交变磁场检测
交变磁场检测主要是对特定的交变磁场环境进行 检 测 。 本 文 选 用 LC 选 频 振 荡 电 路 检 测 交 变 磁 场 , 然 后 通过放大电路的放大和检波电路的检波处理,得到与振 荡信号峰峰值成正比的直流电平,以便于 A/D 转换。 其 原理框图如图 2 所示。
电选 信 峰 主 磁频 号 值 控 环滤 放 检 芯 境波 大 波 片
图 2 交变磁场检测原理框图
(1) 选 频 部 分 采 用 LC 振 荡 电 路 的 原 理 进 行 设 计 。 根 据 LC 振 荡 电 路谐振频率计算公式和市场上电感电容型号,选用一定 量值的电感和电容。 电感选型时要注意其 Q 值和内阻, Q 值会影响其谐振增益和交变磁场的检测。 (2) 放 大 部 分 信号的放大有多种方法:基本放大电路、带电压偏 置的放大电路、运算放大电路等。 对于基本放大电路信 号,其静态工作点易受温度变化的影响,输出信号可能 会 出 现 失 真[5]。 这 就 需 要 带 电 压 偏 置 的 放 大 电 路 , 偏 置
电磁智能车的设计与调试
龙源期刊网
电磁智能车的设计与调试
作者:李宗项羽升蒲荣军张笑楠
来源:《硅谷》2012年第13期
摘要:主要研究基于磁导技术的飞思卡尔智能车传感器技术及调试方案,经过对磁导车的分析,把磁导车的控制系统分为两个大的子控制系统,它们分别为速度控制系统和方向控制系统。
速度控制系统使小车在直道加速行驶在弯道刹车减速以尽量提高行驶速度和避免因速度过快而造成的小车冲出跑道,方向控制系统使小车沿着赛道中间的导线行驶而不偏移。
在信号的采集方面我们通过加大前瞻实现小车的预见性,提高小车的转弯的灵活性。
为调试出小车的最佳参数,同时还介绍NetUSBDemo软件用于寻找小车最佳参数。
通过一系列的调试,最终
得出这一套设计调试方案是可行的,能在保证小车稳定性的前提下提高小车速度。
智能车磁导航中的信号调理电路设计
Ke r s s r a ;ma e i ed;c i;cr u t y wo d : ma t r c n g t fl ci o1 i i c
磁导航组是即将举办的 21 0 0年 第 五 届 全 国 大 学 生 “ 飞 思卡尔” 杯智 能 汽 车竞 赛 中 首 次 引入 。 赛 制 规 定 , 赛 道 中 新 在 心 线 下 铺 设 漆包 线 ,其 中通 有 2 H , 10m 的交 变 电 0k z/ 0 A = 流 , 率 为 (O 2 H , 流 为 5 ~ 5 A, 求 电磁 组 不 允 频 2 ± )k z 电 0 10m 要 许 通 过 获 取 道 路 的光 学 信 息 进 行 路 径 检  ̄ [ 只 能 通 过 检 测 l1 J。 1 漆 包 线 周 围 的 磁 场 来 引 导 小 车 沿 着 载 流 线 行 驶 。 从 工 作 频 率 、 出信 号 的 大 小 、 件 成 本 、 场 强 度 等 方 面 综 合 考 虑 , 输 器 磁 最 适 合 用 于磁 导 航 赛 道 检 测 的传 感 器 就 是 感 应 线 圈[1 测 2 。检 - 3 线 圈 安 装 在 智 能 车 体 上 后 . 能 车 前 进 过 程 中线 圈 与 导 航 载 智 流 线 之 间 的 空 间 方 位 决 定 了 线 圈 输 出 的 感 应 电 动 势 , 配 接 再 适 当 的 信 号 调 理 电路 ,将 检测 线 圈 输 出 的 电 信 号 经 过 放 大 、
磁导航智能车中的正弦波峰值检测电路设计

磁导航智能车中的正弦波峰值检测电路设计【摘要】在智能车磁导航中通常以电磁线圈作为赛道路径识别传感器。
测量出电磁线圈输出感应电动势为毫伏级的正弦波信号,而智能车控制电路需要0-5V的直流电压信号。
以此为出发点,以NE555定时器为核心,设计了一种正弦波峰值检测电路。
先用电磁线圈输出的正弦波产生一个控制信号,再用此控制信号触发采样保持器采样,最后保持并输出当前正弦波峰值电压。
通过这种方法确保了信号检测的实时性、准确性和实用性。
【关键词】智能车;磁导航;正弦波;峰值检测1.整体电路设计框图检测线圈输出的正弦波信号需要进行放大和电压抬高运算。
放大和电压抬高电路输出的信号一路送入移相电路,另一路送入采样保持电路。
移相后输出的信号进入电压比较电路,产生的方波送往多谐振荡电路,在方波的下降沿触发多谐振荡器动作,产生一个窄脉宽的低电位脉冲,然后经过一个反相器,得到一个窄脉宽的高电位脉冲,用此脉冲信号控制采样保持电路进行采样。
最后输出峰值检波后的直流电压信号。
整体电路设计框图如图1所示。
2.检测线圈中感应电动势的计算1)磁导航智能车竞赛使用路径导航的交流电流频率为20KHz,产生的电磁波属于甚低频(VLF)电磁波,波长为10-100Km。
赛道中心载流导线和小车尺寸远远小于电磁波的波长,电磁场辐射的能量很小,所以能感应到电磁波的能量非常小。
因此,可以将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围的磁场分布,从而进行位置检测。
由于赛道长度远远大于小车尺寸,因此,可将赛道中心线处的载流导线近似看作无限长直导线。
那么载流长直导线周围感应磁场的分布是以导线为轴的一系列同心圆,圆上的磁场强度B大小相同,方向为电流i的右手螺旋切向。
距离导线r处P点的磁感应强度为:式中μ0为真空磁导率,i为长直导线中的交变电流。
2)导线中的电流按一定规律变化时,导线周围的磁场也将发生变化,则线圈中将感应出一定的电动势。
线圈内部感应电动势E与磁场B(t)、电磁线圈的圈数N、截面积A的关系有:由于导线中通过的电流频率较低,且线圈较小,令线圈中心到导线的距离为,认为小范围内磁场分布是均匀的,则线圈中感应电动势可近似为:即线圈中感应电动势的大小正比于电流变化率,反比于线圈中心到导线的距离,其中常量K为线圈摆放方法。
磁导航中的磁检测传感器设计及实现

磁导航中的磁检测传感器设计及实现张政霖;袁明新;凌和强;王彬彬;申燚【摘要】To improve the tracking accuracy of magnetic navigation for mobile robots,a magnetic detection sensor based on HMC1022 magnetoresistive chip was designed.In the designed sensor,theSTC15F2K60S2 microcontroller was taken as the core, the IRF7105 switch tube was used to set or reset the sensor,the biasing circuit was designed to eliminate the influence of interfer-ence magnetic field,and theLMC6482AIM chip was used to amplify and filter the detection signal.The experimental results show that the designed sensor can effectively and accurately measure the magnetic field of the magnetic belt,and help mobile robots to achieve accurate autonomous pared with the existing Hall sensor,the tracking error based on the designed sensor is reduced by fifty percent,which further verifies the validity of the designed sensor.%为了提高移动机器人磁导航的跟踪精度,设计了一种基于HMC1022磁阻芯片的磁检测传感器.该传感器以STC15F2K60S2单片机为核心,利用IRF7105开关管实现对传感器的置位或复位;利用偏置电路消除干扰磁场的影响;利用LMC6482AIM芯片实现对信号的放大滤波.实验测试结果表明:该传感器不仅能够有效、准确地测量磁带的磁场大小,而且能帮助移动机器人实现精确地自主导航.与现有的霍尔传感器相比,其跟踪误差平均减小50%,从而进一步验证了所设计传感器的有效性.【期刊名称】《仪表技术与传感器》【年(卷),期】2017(000)011【总页数】5页(P6-9,59)【关键词】移动机器人;磁导航;磁阻芯片;磁检测传感器;单片机【作者】张政霖;袁明新;凌和强;王彬彬;申燚【作者单位】江苏科技大学机电与动力工程学院,江苏张家港 215600;张家港市香樟树众创空间服务中心,江苏张家港 215600;江苏科技大学机电与动力工程学院,江苏张家港 215600;张家港市香樟树众创空间服务中心,江苏张家港 215600;张家港江苏科技大学产业技术研究院,江苏张家港 215600;江苏科技大学机电与动力工程学院,江苏张家港 215600;张家港市香樟树众创空间服务中心,江苏张家港 215600;张家港江苏科技大学产业技术研究院,江苏张家港 215600;江苏科技大学机电与动力工程学院,江苏张家港 215600;张家港江苏科技大学产业技术研究院,江苏张家港215600【正文语种】中文【中图分类】TP212导航技术一直是移动机器人领域的关键技术之一。
基于磁导航路径识别的智能车设计2
工学院本科生毕业设计(论文)基于磁导航路径识别的智能车设计——软件设计The Design of Smart Car Based on Magnetic Navigation Path Identification——Software Design总计:37 页表格: 1 个插图: 16 幅南阳理工学院本科毕业设计(论文)基于磁导航路径识别的智能车设计——软件设计The Design of Smart Car Based on Magnetic Navigation Path Identification——Software Design学院(系):电子系专业:自动化学生姓名:学号:指导教师(职称):评阅教师:完成日期:理工学院nstitute of Technology基于磁导航路径识别的智能车设计——软件设计自动化专业[摘要]本设计以飞思卡尔16位单片机MC9S12XS128作为核心控制器,在智能车控制系统硬件设计的基础上,通过使用软件Freescale CodeWarrior对单片机编写控制程序,实现智能车的自动循迹。
设计中利用电磁传感器采集道路磁场信息,通过信号采集、路径识别等算法,判断智能车的运行状态和路径形状;利用测速编码器进行速度检测,然后通过角度控制、速度控制等算法,确定对电机和舵机的控制;最后结合硬件系统实现智能车速度和转向的自动控制,使智能车能够快速、稳定的跑完赛道。
[关键词]磁导航;路径识别;角度控制;速度控制The Design of Smart Car Based on Magnetic Navigation PathIdentification——Software DesignAutomation SpecialtyAbstract: The design is based on the hardware design of intelligent vehicle control system whose core controller is Freescale's 16-bit microcontroller MC9S12XS128, and the intelligent vehicle achieves automatic tracking through executing control procedures by the use of Freescale CodeWarrior. The software design collects the magnetic information on the road by using electromagnetic field sensors, judges the operational status of intelligent vehicle and path shape through the signal acquisition and path recognition algorithm, detects speed through the use of speed detection encoder, then determines the control of the motor and steering gear through angle control and speed control algorithm, and finally achieves the automatic controller of speed and steering of the intelligent vehicle by integrated with the hardware systems, so the intelligent vehicle can finish the track quickly and stability.Key words: Magnetic navigation; path identification; angle control; speed control目录1 引言 (1)1.1 课题背景 (1)1.1.1 国外智能车研究概况 (1)1.1.2 国内智能车研究概况 (2)1.1.3 应用前景 (2)1.2 本课题主要研究内容 (3)2 系统整体设计 (3)2.1 磁导航原理 (3)2.2 系统设计分析 (5)2.2.1 硬件设计分析 (5)2.2.2 软件设计分析 (7)3 软件设计 (8)3.1 传感器信号采集 (8)3.2 智能车偏移、转向和路径形状判断 (9)3.2.1 智能车偏移 (9)3.2.2 智能车转向 (10)3.2.3 路径形状 (10)3.3 角度控制算法 (10)3.3.1 十字路口 (11)3.3.2 其它路径 (12)3.4速度控制算法 (13)3.4.1 十字路口 (13)3.4.2 其它路径 (13)3.5智能车的启动与停止 (13)4编程与调试 (14)4.1 Freescale CodeWarrior V5.9软件及其应用 (14)4.2 编程思路 (17)4.2.1 主程序 (17)4.2.2 中断子程序 (17)4.3 系统调试 (18)4.3.1弯道 (18)4.3.2 十字路口 (19)4.3.3 其它 (19)结束语 (20)参考文献 (21)附录 (22)致谢 (31)1 引言1.1 课题背景十九世纪末,随着内燃机的诞生,人们发明了最现代化的交通工具——汽车。
磁悬浮车地通信中频调制器的设计与实现.
磁悬浮车地通信中频调制器的设计与实现1引言频移键控(FSK)是利用数字基带信号控制载波的频率来传送信息的一种方式。
“1”码用频率f1传输,“0”码用频率f2传输。
FSK信号又可分为2种,一种叫离散相位FSK信号,记作DPFSK,这种信号的波形在基带信号“0”,“1”交替时,载波相位不连续;另一种叫相位连续FSK信号,记作CPFSK,他在码元“0”,“1”交替时相位连续。
CPFSK信号由于其相位的连续性,不仅具有实现容易、适用频带宽、抗干扰能力强、解调无需相干载波等优点,而1 引言频移键控(FSK)是利用数字基带信号控制载波的频率来传送信息的一种方式。
“1”码用频率f1传输,“0”码用频率f2传输。
FSK信号又可分为2种,一种叫离散相位FSK信号,记作DPFSK,这种信号的波形在基带信号“0”,“1”交替时,载波相位不连续;另一种叫相位连续FSK信号,记作CPFSK,他在码元“0”,“1”交替时相位连续。
CPFSK信号由于其相位的连续性,不仅具有实现容易、适用频带宽、抗干扰能力强、解调无需相干载波等优点,而且避免了DPFSK信号由于在频率转换点上的相位不连续,而使功率谱产生很大的旁瓣分量,带限后会引起包络起伏的缺点,因此在数字通信领域有着广泛应用。
在实际应用中CPFSK信号的实现有许多种途径,例如采用频率切换技术、动态改变谐振电路LC组件参数或者直接采用调制芯片如DDS等。
如何在满足系统功能的前提下,以较少的硬件成本完成CPFSK信号调制,具有广泛的应用价值。
本文介绍在我国磁悬浮列车车地通信系统中应用的一种CPFSK中频调制器,其核心是基于锁相环路的CPFSK信号调制技术。
系统要求中频频率为280 MHz,在信道带宽25 MHz以内,对前级编译码板提供的码率为10.24 Mb∕s的数据和周期为1 ms,脉宽10~12μs的报头脉冲信号实现调制后送至后级的38 GHz 毫米波前端。
2 设计思路及系统仿真CPFSK的基本数学原理就是用数字基带信号去控制频率的切换,完成对载频信号的调制,并保持相位的连续性,从而实现数字信息的传输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能车磁导航中的信号调理电路设计
2010-09-28 19:50:17 来源:END
关键字:磁导航智能车信号调理电路
磁导航组是即将举办的2010年第五届全国大学生“飞思卡尔”杯智能汽车竞赛中首次引入,新赛制规定,在赛道中心线下铺设漆包线,其中通有f=20 kHz,I=100 mA的交变电流,频率为(20±2)kHz,电流为50~150 mA,要求电磁组不允许通过获取道路的光学信息进行路径检测,只能通过检测漆包线周围的磁场来引导小车沿着载流线行驶。
从工作频率、输出信号的大小、器件成本、磁场强度等方面综合考虑,最适合用于磁导航赛道检测的传感器就是感应线圈。
检测线圈安装在智能车体上后,智能车前进过程中线圈与导航载流线之间的空间方位决定了线圈输出的感应电动势,再配接适当的信号调理电路,将检测线圈输出的电信号经过放大、检波等处理,最终转换为智能车单片机能接收的信号,为智能车提供导航依据,这是磁导航智能车能够正确寻道、高速行进的重要基础性工作。
而到目前为止,磁导航的检测研究还很少,本文将对检测线圈配接的信号调理电路进行探讨。
1 检测线圈中的感应电动势
由于比赛用车的尺度远小于赛道长度,可将载流导线近似看作无限长直导线。
载流长直导线周围的磁感应线是以导线为轴的同心圆环,B的方向为电流i的右螺旋切向,距离导线a的P点磁感应强度
式中μ0为真空磁导率,i为直导线中的交变电流,以正弦电流激励(若为非正弦波,可看作是一系列正弦波的线性迭加),i=Ipsin2πft,故B为交变磁场,通过放置在导线周围的检测线圈将交变磁场转化为感应电动势。
假设在载流导线正上方竖直放置面积为S,匝数为N的矩形检测线圈,此时磁感应强度与线圈平面垂直,以线圈中心P点处的磁感应强度可估算出通过线圈的磁通量φ
式(4)表明,当线圈绕制成型后,线圈匝数Ⅳ和面积S已确定。
检测线圈输出的感应电动势还与激励电流的幅值,Ip 和频率f成正比。
赛制规定的激励电流频率为(20±2)kHz,变化不超过10%。
但电流范围50~150 mA,变化可达3倍,这将对线圈输出的感应电动势产生很大影响。
若取N=20,μ0=4π×10-7N/A2,S=O.002 m2,f=20 kHz,Ip=150 mA,a=0.03m,则可估算出感应电动势的幅值E=5 mV,但这只是一个数量级估算,实际上,若线圈偏离载流导线,或载流导线中的激磁电流减小,或采用尺寸更小的检测线圈时,感应电动势的幅值将迅速减小。
在小车寻道前进过程中,小车和固定在小车上的检测线圈总会左右偏离载流导线,检测电路的任务就是要随时判断出小车与载流线赛道的相对位置,以便根据小车偏离赛道的程度和小车的速度控制小车上舵机的转向角度。
而要实现小车与载流线赛道的相对定位,就必须在小车上排列多个相同的检测线圈,与此对应,每个检测线圈都配接相同的信号调理电路,只有位于载流线赛道正上方的线圈对应的电路输出信号最大。
也就是说,小车与载流线赛道的相对位置由多路检测线圈中输出信号的相对最大值决定,而与每个检测线圈输出的信号大小无直接关系,找出各路线圈中感应电动势的最大值,就可知赛道在该线圈下方。
尽管激励电流频率和幅值的变
化会显著影响线圈输出的感应电动势,但这些因素对所有检测线圈的影响相同,上述“找最大” 实现赛道定位的思路则不受影响,从而提高检测电路对赛道的适应性。
2 智能车控制电路对检测信号的要求
检测线圈输出的感应电动势必须经过放大和必要的处理,最后提供给智能车的单片机进行A/D转换采样,以获取赛道的位置信息。
智能车的单片机A/D输入端需要O~5 V之间的单极性电压,对此,可以为单片机提供两种不同的信号类型,单片机采用不同的方式采样。
方式1:将检测线圈输出的频率20 kHz、大约毫伏级的信号进行放大,放大倍数约1 000倍(60 dB),然后进行幅度检波转换为直流电压。
单片机对每路检测信号只采样一次就可知道信号大小,巡回采集多路电压进行比较,通过“找最大”就能实现赛道定位。
方式2:直接采集放大后的20 kHz信号(迭加在直流偏置电压上),但要求单片机的A/D采集速率远大于20 kHz,单片机连续采集多个周期的电压,根据信号的周期性从采集的数据中找出最大值和最小值,根据二者的差值获得交流信号的峰峰值。
此方式中,单片机对每路信号要快速采样很多次才能获取该路信号的大小。
同样,要巡回采集多路电压,通过“找最大”实现赛道定位。
为了实现小车与载流线赛道的准确定位,采用多个检测线圈是必然的选择.赛制规定。
最多可使用16个检测传感器。
比较上述两种方式,方式2的信号处理电路无需检波功能,但占用单片机大量的工作时间,因此,方式1是合理的选择。
3 信号调理电路设计
由前面的分析可见,信号调理电路的任务和工作条件是:1)带宽和增益,对20 kHz、毫伏级的信号放大约1 000倍,且动态范围较大;2)供电电源,车载电池供电,使用单电源放大电路,电池额定电压为7.2 V;3)信号转换,对放大后的信号进行幅度检波。
使用分立元件搭建电路虽然能实现该功能,但电路复杂,调试不方便,并且电路性能会随电池电压的波动而变化。
常见的通用运放如OP07、LM324、LM358等,对于20 kHz信号无法满足带宽和增益的要求,同时,其输出摆幅较小。
近年来出现的一些新的集成运算放大器能很好地承担上述任务。
如OPA228系列运放、MAX445l系列运放。
特别是MAX4451双运放,-3 dB带宽达210 MHz,可以在+4.5~+11 V单电源条件下工作,输出摆幅大,具有轨到轨输出,开环增益大于50 dB,使用两级放大外加负反馈完全能胜任。
实际电路如图1所示。
智能车是靠电池驱动的,随着工作时间持续,电池电压必然下降。
由于运放MAX4451的共模抑制比极高,典型值CMRR=95 dB,所以在单电源条件下可正常工作,并且,电池电压的波动基本不影响运放的工作性能。
图1中L1是检测线圈。
R1、R2分压为运放提供输入偏置电压,适当调节R2可改变放大器的输入偏置电压。
由于第2级放大电路的增益设定为(R5/R4)=30倍,可根据检测线圈L1输出感应电动势的大小,适当选择R3改变第1级的放大倍数,从而使总增益满足要求。
引入R7是为了降低第1级放大电路的直流增益,从而提高静态工作点的稳定性。
但R7的引入降低了第1级电路的交流放大能力,故接人C4=0.47μF实现交流旁路。
VD1、R6和C3构成幅度检波电路,VD4选择压降较小的高频锗二极管,检波电路的时间常数τ=R6C3一般选择为激磁电流(f=20 kHz)周期的3~5倍,C3
的容量越大,输出到单片机A/D端的直流电压中的20 kHz波纹越小,但C3的容量过大将导致电路响应时间长,对智能车与赛道的偏离反应迟钝.C3的实际取值应在此估算的基础上通过测试确定。
此外,按常理,R1=R2分压为运放提供输入偏置应该为电源电压VCC的一半,约3.6 V。
但由于VD1、R6和C3构成的是正半周峰值包络检波电路,检测线圈L1的感应电动势越大,检波电路输出的直流电位越高。
如前所述,线圈输出的感应电动势受多种因素影响变化范围较大,为增大此电路的输出摆幅,选择R1=20 kΩ,R2=5.1kΩ,使运放同相端的输入偏置电压降低到约1.8 V,以降低检波电路输出端的初始直流电位,增大电路的动态范围。
4 结论
上述电路能满足磁导航智能车对信号检测的要求。
电路调节方法:静态条件下,调节R2使检波电路输出电压约为1V;动态条件下,当竖直放置的检测线圈距离赛道载流线最近,且激磁电流为150 mA时,调节R3使检波电路输出电压接近但不超过5 V,以满足单片机A/D端采集电压的要求。
由于检测线圈输出的感应电动势会随着线圈与赛道载流线之间距离增大而迅速减小,为提高赛道检测的灵敏度和准确性.使用一个检测线圈是不行的。
实际上,可以在小车的前端平行放置多个竖直检测线圈,每个检测线圈都配接相同的信号调理电路,智能车上的单片机必须快速巡回采集每个调理电路的输出电压,找出输出电压最大值,就可判断出的赛道载流线就在该路检测线圈的正下方。
单片机巡回采集各个调理电路的输出电压时,只需要比较哪一路输出电压最大,就能实现寻道,并不关心具体电压的数值。
这种“找最大”方法的优点是:信号调理电路的输出电压与赛道激磁频率((20±2)kHz)、激磁电流(50~150 mA)有关,但激磁频率和激磁电流对各路检测电压的影响是相同的,上述“找最大”方法始终能够根据输出电压的相对最大值判断出赛道位置,这就使得寻道检测电路对赛道有很好的适应能力。
多个检测线圈也可以采用水平放置的方式,配接电路相同。
但不难看出,若检测线圈水平放置在载流导线正上方时,感应电动势为零;检测线圈位于载流导线上方的一侧时,感应电动势较大;检测线圈位于载流导线上方的一侧,且偏离较远时,感应电动势减小。
此时,智能车上的单片机应该快速巡回采集每个调理电路的输出电压,找出输出电压最小值,就可判断出赛道载流线就在该路检测线圈的正下方。