OV6620数字摄像头IP核的设计与实现
基于PCI总线的CMOS图像传感器OV6620的驱动设计

第25卷 第3期2010年6月液 晶 与 显 示Chinese Journal of Liquid Crystals and DisplaysVol 125,No 13J un.,2010文章编号:100722780(2010)0320460206基于PCI 总线的CMOS 图像传感器OV6620的驱动设计董 岩,张 涛,李清军,李文明,贾继强,陈浠惠(中国科学院长春光学精密机械与物理研究所,吉林长春 130033,E 2mail :dongyan 2personal @ )摘 要:设计了一种基于PCI 总线的CMOS 图像传感器OV6620的驱动系统,详细介绍了PCI 总线及其芯片PCI9054的特点及应用,给出了PCI 总线的驱动程序和应用程序的设计方法。
讨论了CMOS 图像传感器OV6620的驱动研究,给出了FP GA 对OV6620的驱动设计和时序。
实验结果表明,基于PCI 总线的图像采集系统可以大幅提高图像数据的传输速度,解决了图像采集的瓶颈问题。
关 键 词:PCI 总线;PCI9054;Windriver ;OV6620中图分类号:TP311 文献标识码:ADesign of Image Aquision System B ased on PCI BusDON G Yan ,ZHAN G Tao ,L I Qing 2jun ,L I Wen 2ming ,J IA Ji 2qiang ,C H EN Xi 2hui(Changchun I nstit ute of Optics ,Fine Mechanics and Physics ,Chinese A cadem y of Sciences ,Changchun 130033,China ,E 2mail :dongy an 2personal @ )Abstract :A kind of driver design met hod of CMOS image sensor based on PCI bus was int ro 2duced.PCI bus ,t he characteristic and basic using met hod of PCI9054chip were presented in detail.Furt hermore ,t he design met hods of driver and application of PCI bus were given.Meanwhile ,t he driver research of image collection sensor OV6620was discussed ,and t he designs and timing diagram of FP GA for OV6620were given.The result s show t hat t he de 2sign of t he image real 2time collection system based on PCI bus can be used to accelerate t he speed of image data transmission ,and t he bottleneck of image real 2time collection was set 2tled.K ey w ords :PCI bus ;PCI9054;Windriver ;OV6620 收稿日期:2009210215;修订日期:2009211210作者简介:董岩(1978-),男,吉林长春人,博士研究生,主要研究方向为航空相机的快门控制及其平台的伺服控制。
运营商摄像头芯片方案设计
运营商摄像头芯片方案设计摄像头芯片是移动终端设备中的一个重要组成部分,现如今,随着5G技术的迅猛发展,移动通信网络的带宽越来越大,用户对摄像头的要求也越来越高,对于运营商而言,如何设计一款能够满足用户需求并且能够提供更好的用户体验的摄像头芯片方案,成为了一项重要的工作。
一、需求分析在设计摄像头芯片方案之前,首先需要进行需求分析,这样才能更好地满足用户的需求。
用户对于摄像头芯片的需求主要集中在以下几个方面:高清画质、快速对焦、稳定防抖、低功耗、低延迟、多功能性。
1. 高清画质高清画质是用户对摄像头最基本的要求之一,随着现在手机摄像头的像素不断提升,用户对画质的要求也越来越高。
摄像头芯片需要能够支持超高清的拍摄,使得用户在拍摄照片或者录制视频时能够获得更加清晰的画质。
2. 快速对焦摄像头在面对迅速移动的物体时,需要能够快速对焦,以便用户能够捕捉到精彩瞬间。
因此,摄像头芯片的设计需要支持快速对焦功能,确保用户能够拍摄清晰的照片或者视频。
3. 稳定防抖稳定防抖功能对于用户在拍摄视频时尤为重要,它可以有效减少手持拍摄时的抖动,从而获得更加稳定和清晰的影像。
因此,摄像头芯片方案需要具备良好的稳定防抖功能。
4. 低功耗作为移动终端设备,手机需要时刻保持低功耗的状态,以延长续航时间。
摄像头芯片方案需要在保证用户体验的同时,尽可能降低功耗,减少对手机电池的消耗。
5. 低延迟在实时视频通话和拍摄视频时,用户对于低延迟的需求也非常高,摄像头芯片需要能够提供稳定的低延迟性能,以满足用户对于实时交流的需求。
6. 多功能性除了基本的拍摄功能外,用户还希望摄像头能够具备更多的功能,比如智能识别、AR增强现实、虚拟美颜等,因此,摄像头芯片方案也需要具备这些多功能性。
二、技术方案设计在了解了用户需求之后,接下来就是设计摄像头芯片的技术方案。
摄像头芯片的主要技术方案包括图像传感器、图像处理器、镜头系统、自动对焦系统和防抖系统等。
1. 图像传感器图像传感器是摄像头芯片的核心部件之一,它能够将光信号转换成电信号,是影像采集和处理的第一步。
飞思卡尔智能车OV6620数字摄像头详解

飞思卡尔智能车OV6620数字摄像头详解C/C++资讯站原创,转载请保留出处在本站的《飞思卡尔摄像头的选择及安装》一文中我们提到过数字摄像头OV6620,这篇文章里我们将对OV6620进行详细说明。
与普通模拟摄像头需要9~12V供电不同,OV6620仅需5V供电,因飞思卡尔智能车比赛提供的电池电压是7.2~8.2V,所以用OV6620省去了做升压电路这一环节,仅仅需要做一个5V供电就可以,可以采用7805芯片或2940芯片,电路简单。
OV6620采用PAL制式(国内的普通电视机制式),每秒25帧,分辨率为356*292,内部集成了AD转换模块和视频分离模块,省去了1881视频分离芯片。
当然,也可以当模拟摄像头来使用,比如调焦时,这时可以将视频信号端接至OV6620的VTO端即可。
OV6620的优点:供电电压低,简化电路;内部集成AD和视频分离模块,简化电路,并且使得采集程序简单,采集质量高;视频信号转换在内部进行,减轻单片机负担。
OV6620共有32个引脚,但我们真正能用到的不多。
我在做智能车时仅仅用到13个引脚,其他引脚并未使用,但是其他学校也有使用其他引脚的。
现在把常用的引脚列出来:Y0~Y7(数据输出端,接单片机IO口)、VSYNC(场中断信号端)、HREF(行中断信号端)、VCC(接5V)、GND(接地)、VTO(接视频采集卡调焦),其他可能会使用到的引脚:PCLK(像素同步信号端)、FODD(奇偶场信号端)。
摄像头的工作原理在这里不在进行说明,但需要说明的是:因为OV6620场中断上升沿时间很短,单片机可能捕捉不到上升沿中断,所以判断OV6620一场是否开始选择使用下降沿判断;行中断使用上升沿判断,而且采集的有效点都是在上升沿范围内,下降沿则表示已经进入行消隐区,此时采集的都是废数据(在使用OV6620采集时都为0X10)。
利用这个可以通过测试判断一行所能采集到的有效点个数。
关于中断触发,行中断(HREF)接单片机的T0口,场中断(VSYNC)接单片机的T1口,保证图像采集不会被打断。
OV6620有关的说明
OV6620有关的说明介绍一下数字摄像头OV6620的特征1)、OV6620需要稳定的5V电压供电,和系统板上的供电电源兼容。
2)、NAL制,每秒25帧,一帧两场,那么每秒就有50场。
意味着20MS就有一幅图像产生。
356x 292 pixels ,理解为:有292行,一行有356个点。
3)、视野和可视距离:这个和镜头的选择有关,f=3.6MM时视野应该有25度左右,f 越大视场.可视距离需要调节镜头对焦.经我测试可视距离可以看十几米,毕竟相素值只有10 万越小多,用单片机读可以看到3-4M的距离.这里解释一下为什么用单片机读会打折扣. 因为黑线宽度只有2.5CM,太远了黑线会很细,采点之后就分辩不出是噪声还是有用信号了. 在1米左右时, 黑线宽度可用8 个点表示.注:以上数据均是24MBUSCL下每行可取150个点时测得,没有翻转摄像头•4)、内部有IIC 可编程.可以调整摄像头的参数,比如最大灰度,对比度,暴光率控制等等. 其本质是SCC助议的寄存器写入,需要对摄像头做跳线处理,并用MCU勺I/O 口模拟SCC眇议.注:SCCB协议视作IIC协议,有些细微的差别•对IIC的写入,本文后面稍加说明• 5)、数据格式-YCrCb 4:2:2, GRB 4:2:2, RGB; 电子曝光/增益/白平衡控制;内部自动图像增强,亮度,对比度,伽马,饱和度,锐度,力卩窗等•最重要的是,不需AD,不需1881。
当然玩一下他的模拟输出一可以,VTO管脚就可以当普通模拟摄像头用.OV6620勺图像采集数字摄像头相对来说贵一些,他内部的信号处理比较复杂,接口也较多,一般是彩色的YUV信号,只取丫的亮度信号,所以用起来略有浪费•先看ov6620datasheet上的时序图:_ 刖帥Field ■切I L J Qtid Fiela:FODC-1)HREFValid DataHorlzontoi TirninnFOTJDHREF高为40u$,低为23uS饥lk为lltaS如果这个图还不明白的话看下面的说明PCLK遷L如果这个图还不明白的话看下面的这个图1、在采集时乎略TCLK首先是因为它太快了,捕捉不到,另外也没有必要捕捉到它。
基于海思方案的ip解决方案

基于海思方案的ip解决方案一、引言基于海思方案的IP解决方案是指利用海思芯片开发的一种解决方案,用于实现各种功能和应用。
海思方案是一种高性能、低功耗的芯片方案,广泛应用于视频监控、智能家居、工业自动化等领域。
本文将详细介绍基于海思方案的IP解决方案的设计原理、实现方法和应用场景。
二、设计原理1. 海思芯片的特点海思芯片是一种高性能的系统级芯片,具有低功耗、高集成度、强大的计算能力等特点。
它采用先进的制程工艺,集成了CPU、GPU、DSP等多个处理单元,可以实现复杂的算法和图像处理功能。
2. IP的概念IP(Intellectual Property)是指一种可重复使用的设计单元,可以用于构建各种系统和应用。
IP可以是硬件IP,如处理器、存储器等,也可以是软件IP,如算法、驱动程序等。
基于海思方案的IP解决方案主要是指利用海思芯片开发的硬件IP。
3. IP解决方案的设计流程基于海思方案的IP解决方案的设计流程包括需求分析、系统设计、IP设计、验证和集成等步骤。
首先,根据应用需求进行需求分析,确定所需的功能和性能指标。
然后,进行系统设计,包括系统架构设计、接口设计等。
接下来,进行IP设计,即根据系统设计的要求,设计硬件IP。
最后,进行验证和集成,确保IP的功能和性能符合要求。
三、实现方法1. IP设计语言基于海思方案的IP解决方案的设计语言主要有Verilog和VHDL两种。
Verilog 是一种硬件描述语言,可以描述电路的结构和行为。
VHDL是另一种硬件描述语言,也可以用于描述电路的结构和行为。
根据具体需求和开发团队的经验,选择合适的设计语言进行IP设计。
2. IP设计工具基于海思方案的IP解决方案的设计工具主要有Xilinx Vivado、Altera Quartus 等。
这些工具提供了丰富的设计库和开发环境,可以帮助开发人员快速完成IP设计。
同时,这些工具还提供了仿真和验证功能,可以帮助开发人员验证IP的功能和性能。
OV6620中文资料
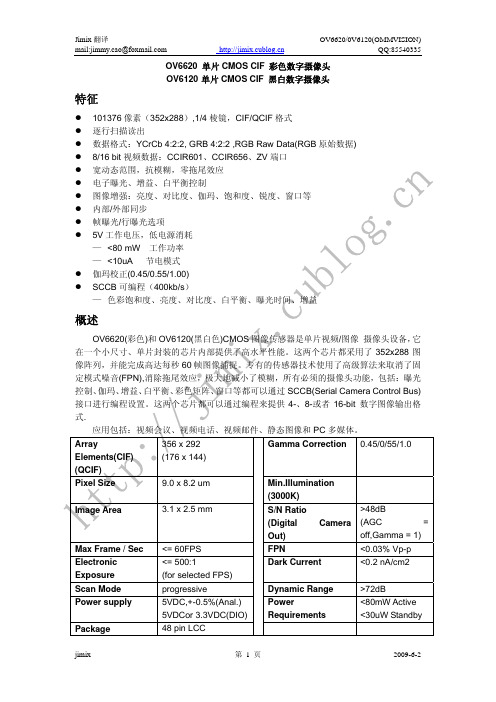
OV6620 单片CMOS CIF 彩色数字摄像头OV6120 单片CMOS CIF 黑白数字摄像头特征z 101376像素(352x288),1/4棱镜,CIF/QCIF 格式z 逐行扫描读出z 数据格式:YCrCb 4:2:2, GRB 4:2:2 ,RGB Raw Data(RGB 原始数据)z 8/16 bit 视频数据:CCIR601、CCIR656、ZV 端口z 宽动态范围,抗模糊,零拖尾效应z 电子曝光、增益、白平衡控制z 图像增强:亮度、对比度、伽玛、饱和度、锐度、窗口等z 内部/外部同步z 帧曝光/行曝光选项z 5V 工作电压,低电源消耗— <80 mW 工作功率— <10uA 节电模式z 伽玛校正(0.45/0.55/1.00)z SCCB 可编程(400kb/s )— 色彩饱和度、亮度、对比度、白平衡、曝光时间、增益概述 OV6620(彩色)和OV6120(黑白色)CMOS 图像传感器是单片视频/图像 摄像头设备,它在一个小尺寸、单片封装的芯片内部提供了高水平性能。
这两个芯片都采用了352x288图像阵列,并能完成高达每秒60帧图像捕捉。
专有的传感器技术使用了高级算法来取消了固定模式噪音(FPN),消除拖尾效应,极大地减小了模糊,所有必须的摄像头功能,包括:曝光控制、伽玛、增益、白平衡、彩色矩阵、窗口等都可以通过SCCB(Serial Camera Control Bus)接口进行编程设置。
这两个芯片都可以通过编程来提供4-、8-或者16-bit 数字图像输出格式.应用包括:视频会议、视频电话、视频邮件、静态图像和PC 多媒体。
ArrayElements(CIF)(QCIF)356 x 292 (176 x 144) Gamma Correction 0.45/0/55/1.0 Pixel Size9.0 x 8.2 um Min.IIlumination (3000K) Image Area 3.1 x 2.5 mm S/N Ratio(Digital CameraOut)>48dB (AGC = off,Gamma = 1) Max Frame / Sec <= 60FPS FPN<0.03% Vp-p Electronic Exposure <= 500:1 (for selected FPS) Dark Current<0.2 nA/cm2 Scan Mode progressive Dynamic Range>72dB Power supply 5VDC,+-0.5%(Anal.) 5VDCor 3.3VDC(DIO)PowerRequirements<80mW Active <30uW Standby Package48 pin LCC管脚图*说明:UV0-UV7输出在0V6120中不可用。
摄像机芯片IP核的设计与仿真
摄像机芯片IP核的设计与仿真随着视觉时代的来临和微电子技术的发展,摄像机已经从过去的胶片成像系统演变到了以CCD为感光器件的电子系统,系统处理数据的核心就是IP核。
论文采用了Top-Down的设计思想,并以Verilog HDL硬件程序描述语言为工具对摄像机IP核进行编程设计。
从系统顶层开始,在集成电路设计的每一层次,都划分为几个设计模块,该层次的硬件行为可由这些模块来描述,同时这一层的模块行为可由其下层的模块进行描述。
通过软件quartus II 13.0对摄像机IP核各模块进行了编译和综合,分析了各模块的结构和模块的功能以及相互之间的关系。
接着用ModelSim 10.1软件对每个模块进行仿真验证,再进行功能分析,验证了摄像机IP核的功能。
I第一章绪论1.1 背景随着现代电子科学技术、现代半导体制造工艺和集成电路设计的不断进步,摄像机从以前的胶片成像逐渐转变到了现在的电子成像,它是一种集光、机、电子为一体的高科技产品。
自从1 9 8 2 年第一台摄像机问世以来,短短十几年间,摄像机在电子技术、集成电路不断发展的基础之上也迅速的发展起来。
摄像机从一开始就表现出了强大的优势(尽管相对于胶片也有不少的不足,但瑕不掩瑜)。
例如:一、不采用胶片成像,就不必进行传统的清洗胶片,暗室加工;二、采用CCD感光成像,图像数据易于保存;三、拍摄后可直接连到计算机上观看,不必像胶片一样需要很长一段时间的处理才能播放;四、对拍摄的图像可以进行数码后期创作,添加各种特效;五、拍摄的图像可以加载到高频信号上实行远距离传输,让更多的人可以观看。
近年来,随着各项技术的发展,交通的便利,摄像机的性能越来越好,价格也越来越低,已经成为人类必备的数码消费产品之一。
摄像机的核心是芯片。
现代人的生活已经进入数码化的大潮之中,手机、电脑、电视、相机等之类的数码产品,这些我们现代人的日常生活用品都是由芯片来控制的。
将不同芯片的功能全部集成与Soc(系统芯片)中,是目前芯片技术发展的一个重要方向,而Soc设计的关键技术就是IP核。
OV7620摄像头模块 数字摄像头

OV7620摄像头模块数字摄像头使用采集卡的测试:1)所需的模块采集卡供电2)详细连接线采集卡的运用过程:1)在桌面上找到下面的软件双击运行2)观察下面窗口的图像3)焦距的调节使用采集卡测试过程中要注意观察画面上是否有黑点,条纹,水滴,灰尘等细节。
上位机测试:所需模块:X128的烧写器CH340X128接线:S0(单片机上的RXD) -----> 串口模块TXDS1(单片机上的TXD) -----> 串口模块RXDGND(单片机上的地) -----> 串口模块GND //如果单片机和串口使用不同电源,也需要共地A0-A7 -----------------> 摄像头模块(数据)Y0 - Y7T0 -----------------> 摄像头模块(行中断)HREFT1 -----------------> 摄像头模块(场中断)VSYN详细接线图片:程序烧写的连接图程序在:胡良工作资料\测试程序\OV7620摄像头9SXS128例程详细步骤:1)在桌面找到下图图标双击打开;2)找到下图双击打开测试程序3)找到下图双击打开(OV7620摄像头9SXS128例程)4)找到下图双击打开Project.mcp5)按下图标注的序列号依次点击6)烧写过程1.2.3.4.关闭上面的那个窗口。
7)上位机的使用(在第3步后可以看到下图。
即TSL1401 9SXS128例程(线性CCD)文件下)1.2.3.4.5.6.观看窗口1和窗口2 的图像变化看最终二值化后的图片边沿是否干净。
如果没有什么干扰点则该模块的性能很好。
基于ARM和CMOS的图像采集系统设计.
基于ARM和CMOS的图像采集系统设计
0引言与视频采集卡等传统图像采集系统相比,嵌入式图像采集系统具有体积小、成本低、可靠性高等优点,在智能交通、远距离监控、汁算机视觉等领域应用广泛。
本文所设计的嵌入式图像采集系统是采用以ARM7为内核的LPC2106作为主控芯片和,先控制CMOS传感器OV6620进行图像采集,然后由LPC2106控制先将图像数据存放人FIFO存储器AL4V8M1440中,最后将图像采集结果通过多种通信接口进行传输,或者通过SD卡来提取该图像采集系统中的图像数
0引言
与视频采集卡等传统图像采集系统相比,嵌入式图像采集系统具有体积小、成本低、可靠性高等优点,在智能交通、远距离监控、汁算机视觉等领域应用广泛。
本文所设计的嵌入式图像采集系统是采用以ARM7为内核的LPC2106作为主控芯片和,先控制CMOS传感器OV6620进行图像采集,然后由LPC2106控制先将图像数据存放人FIFO存储器AL4V8M1440中,最后将图像采集结果通过多种通信接口进行传输,或者通过SD卡来提取该图像采集系统中的图像数据。
该图像采集系统仅用一个ARM芯片就实现了对OV6620的功能控制、时序同步、数据采集与处理等功能,系统结构紧凑,功能强大。
1系统总体方案
如图1所示,在检测时,光线会照射在被摄物体表面,ARM控制面阵CMOS摄像头采集图像,再把获得的图像数据送入FIFO存储器中缓冲一下,然后通过串口传输给电脑,也可通过SD卡接口将图像存放入SD卡中。
【DEMOK原创】智能车数字摄像头使用详解

void TIM_Init(void)
{
TIOS=0x00;
//外部输入捕捉 0,1 通道
TCTL4=0x09;
//通道 0 上升沿触发,通道 1 下降沿触发
TSCR1=0x80;
//使能
TIE=0x03;
//通道 0,1 中断使能
TFLG1=0xFF;
//清中断标志位
}
/*************************************************** ** 函数名称: IO_Init ** 功能描述: IO 口初始化函数 ** 说明: ****************************************************/ void IO_Init(void) {
OV6620 中断采样系统概述
为了提高系统的实时性,视频采集采用输入捕捉的采样方式采样图像数据。 中断入口
行中断? 场中断?
行中断
行中断服务函数
场中断 场中断服务函数
清除行中断标志 清除场中断标志
出口
2/9
DEMOK 的小店
OV6620 图像采集参考代码
DDRB=0X00; }
/***************************************************
** 函数名称: SCI_Init
** 功能描述: 串口初始化函数
** 说明:
****************************************************/
1/9
DEMOK 的小店
VSYN
HREF
PCLK
VYNSC 是判断是否一幅图像开始,周期是 20ms, 其中高电平持续时间很短;HREF 是判 断是否一行图像的开始,周期是 63us 左右,其中高电平持续时间为 40US,低电平持续 时间 23US,那么我们对照时序图可以计算一下 OV6620 的分辨率:20ms/63us=317, 当然实际上没有这么多,消隐和无效信号去掉之后只有 292 行;有效的灰度数据是在行中 断之后的上升沿内,所以不要在行中断后的 23US 后采集。计算一下一行 OV6620 有多 少个点: 40us/110ns=363, 消隐和无效信号去掉之后只有 356 个点。足以证明 OV6620 的分辨率为 356*292。通过示波器观察,PCLK 的周期只有 150ns,依照单片 机的总线,根本无法捕捉到这个信号,此时 PCLK 的波形已经变为尖波,完全没有意义捕捉 这个信号,采集图像时尽快地一个点一个点的取就行了。
OV6620+FIFO摄像头模组使用详解
OV6620+FIFO模组原理详解1 基本参数板间尺寸:34mmx34mmx30mm(含镜头高)定位孔尺寸:28mm工作电压:DC5V ±5%工作电流:50mA 左右扫描方式:逐行扫描最低照度:2.5 lux at f1.4 (3000k)信噪比:> 48 dB有效像素:(H)352 x (V)288数据输出格式:YCrCb 16bit/8bit selectable60Hz 16 Bit YCrCb 4:2:2 - 640x48060Hz 8 Bit YCrCb 4:2:2 - 640x480RGB Raw Data Digital Output 16Bit/8Bit selectableSCCB 接口:最大速率支持400 kBit/sYUV 输出格式:支持TV 或监视器显示读取方式:MCU 主动读取FIFO 的图像数据2 系统实现方法说明2.1 系统硬件连接图2.2 OV6620 时序分析垂直同步信号VSYN 为两个正脉冲之间扫描一帧的定时,即完整的一帧图像在两个正脉冲之间;水平同步信号HREF 扫描该帧图像中各行像素的定时,即高电平时为扫描一行像素的有效时间;像素同步信号PCLK 为读取有效像素值提供同步信号,高电平时输出有效图像数据,若当前图像窗口大小为352×288,则在VSYNC 两个正脉冲之间有288 个HREF 的正脉冲,即288行;在每个HREF 正脉冲期间有352 个PCLK 正脉冲,即每行352 个像素。
这就是VSYNC、HREF、PCLK 三个同步信号之间的关系。
2.3 图像数据自动存储为了将OV6620 输出的图像信号自动地存入FIFO,只需要通过逻辑门就能产生符合FIFO 要求的写时序,如图所示。
为了将OV6620 输出的图像信号自动地存入FIFO,只需要通过一个“与非门”就能产生符合FIFO 要求的写时序,如图所示。
将帧同步信号VSYN 引入MCU 中断输入口,复位后WE 置0,“与非门”关闭,输出1。
OV6620 OV720摄像头YUV RGB格式说明

1视觉颜色的表示方法(RGB YUV HSI YIQ YcbCr YD6Dr CMY CMYK…)在解释OV摄像头的几种格式之前,有必要简单地介绍一下视频或图像的颜色表示方法。
如果要通过上位机图像采集显示图片,必需熟悉图片的数据储存格式。
如BMP格式是由文件头,信息头,调色板,位图数据构成,因此,如果是在VC 环境下采集图像,必须把数据转化为BMP格式进行内存分配和存储。
TIF,JPG 也是一样的。
值得一提的是VB 和MA TLAB在图像显示方面比VC有很大有优势。
如果不用图像的形式显示储存,在VC里利用CDC在GetClientRect的区域上描点显示也不失一种上位面设计方案;在VB里也可以利用lable控件数组用不同的颜色排列组成可视的图片。
1.1RGB格式RGB 在计算机领域有着举足轻重的地位, 由于色彩显示器使用红、绿、蓝3 色来产生需要的颜色, 所以被广泛用于计算机图形和成像之中。
然而, 在处理现实世界的图像时,RGB 并非很有效, 因为它对所有色彩都用等长像素点的R、G、B 3 色加以合成。
这就使得每个像素在R、G、B 3 个成分上拥有相同的像素深度和显示分辨率。
而且, 处理RGB 色彩空间的图像也不是最有效的。
RGB有一个问题是数据量太大,采集里如果每一个相素都是3个BYTE的数据(R G B),是很没有必要的,于是有人就想去了两个相素点共用一种颜色的算法。
这个算法就是著名的bayer算法的初始。
R感应红光,G感应绿光,B感应蓝光。
在Bayer格式的图像中,图像一半的像素分配给G分量,而R和B分量则占图像的另一半像素。
因为G分量是R、B分量的两倍,所以如果G分量采用好的插值方法,不仅可以提高G 分量的质量,还可以提高R和B分量的质量。
Bayer格式示意图:1.2YUV格式人类的眼睛对低频信号比对高频信号具有更高的敏感度。
事实上,人类的眼睛对明视度的改变也比对色彩的改变要敏感的多。
YUV彩色电视信号传输时,将R、G、B改组成亮度信号和色度信号。
V6621-L 和 V6622-L 系列 室内防暴彩色 日夜转换型网络半球摄像机说明书

吸顶装表面装 吊装产品描述V6621-L 和V6622-L 系列室内防暴彩色/日夜转换型网络半球摄像机采用新型的SONY 1/3"彩色EX-view CCD 图像传感器,利用先进的数字信号处理技术对图像进行处理,具有高解析度、高灵敏度、低照度和高信噪比特点。
V6622-L 系列独有的红外线截止滤镜开关功能可以视日夜光线环境变化情况自动切换。
V6621-L 和V6622-L 系列室内防暴彩色/日夜转换型网络半球摄像机通过10/100M Base-T 网络,将模拟视频信号转换为数字视频传输到视频接收端,实现网络视频传输的功能。
网络远程控制功能不仅能让相关软件对网络半球的IP 地址进行搜索,还能通过IE 浏览器对IP 地址、子网掩码、网关进行设置,也能对视频编码进行设置,如预设编码参量,数据传输率,画质等。
通过QoS 的网络服务类型选择,用户可以获得最适合自己的服务方式。
产品特点y SONY 1/3" EX-view CCD 传感器y 全天候防护型设计,采用防暴半球型防护罩,坚固外壳 y 可在水平、垂直、轴向三个旋转方向上调节摄像机角度 y 支持MPEG-4编码,实时传输视频图像y 像素: NTSC(EIA)=380K/PAL(CCIR)=440K(高分辨率) y 520TVL 高解析度,高灵敏度,抑制光晕能力强和高信噪比 y 自动电子快门(AES),自动增益控制(AGC),自动光圈(AI),自动白平衡(AWB),背光补偿(BLC)y 自动红外截止滤光片,彩色/黑白模式自动切换(V6622-L) y 内置非球面红外校正变焦镜头,自动光圈y 支持多用户通过Web server 或V2216等软件进行实时访问 y 用户密码保护,防止非法修改系统参数 y 支持手动设置IP 地址 y 支持动态I-P 画格比率 y 支持动态调整质量与压缩率 y 图像抓拍功能 y 支持移动侦测y 软件网络远程升级,提供网络QoS 的服务类型选择功能 y 支持PoE/12VDC/24VAC 供电 y 外形美观,安装使用简便订购信息V6621-L3010RB 1/3" 室内防暴彩色网络半球摄像机(内置2.5-6mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,PAL ,防暴, 吸顶装,透明球罩,PoE)V6621-L3010RE 1/3" 室内防暴彩色网络半球摄像机(内置3.3-12mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,PAL ,防暴,吸顶装,透明球罩,PoE)V6622-L3010RB 1/3" 室内防暴日夜转换型网络半球摄像机(内置2.5-6mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,黑白模式0.01Lux ,PAL ,防暴,吸顶装,透明球罩,PoE)V6622-L3010RE 1/3" 室内防暴日夜转换型网络半球摄像机(内置3.3-12mm 变焦镜头,MPEG-4,D1,520TVL ,彩色模式0.5Lux ,黑白模式0.01Lux ,PAL ,防暴,吸顶装,透明球罩,PoE)注意:1. 若上述配置下选用NTSC 制, 请将后缀L3010改为L3000。
摄像机IP核的综合、仿真及仿真结果分析
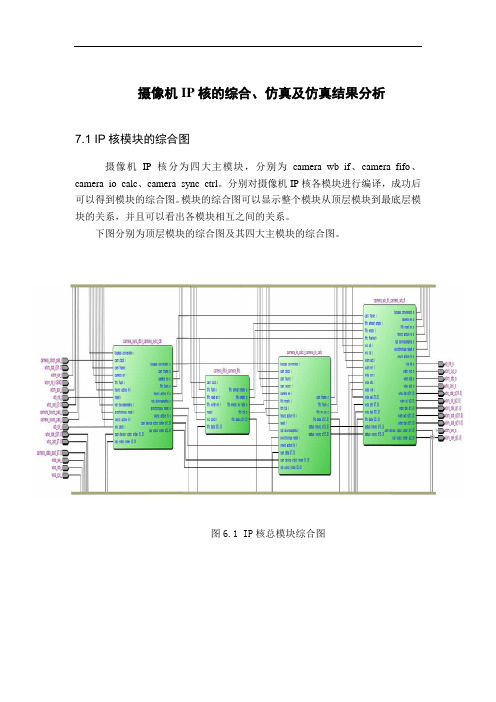
摄像机IP核的综合、仿真及仿真结果分析7.1 IP核模块的综合图摄像机IP核分为四大主模块,分别为camera_wb_if、camera_fifo、camera_io_calc、camera_sync_ctrl。
分别对摄像机IP核各模块进行编译,成功后可以得到模块的综合图。
模块的综合图可以显示整个模块从顶层模块到最底层模块的关系,并且可以看出各模块相互之间的关系。
下图分别为顶层模块的综合图及其四大主模块的综合图。
图6.1 IP核总模块综合图图6.2camera_wb_if 模块综合图图6.3 camera_fifo 模块综合图camera_wb_if 模块综合图(局部)图6.4 camera_io_calc综合图(局部)图6.5 camera_sync_ctrl模块综合图7.2 模块的功能说明、仿真及仿真结果分析本论文将分别对摄像机IP核的四大主模块camera_wb_if、camera_fifo、camera_io_calc、camera_sync_ctrl进行功能说明、仿真及仿真结果分析。
camera_wb_if:功能说明:本模块以wishbone总线为核心,为其他三个模块提供公共数据及wishbone主从设备接口,方便各个模块的数据传输、控制,和IP核功能的实现。
仿真结果分析:由于本IP核原采用Xilinx软件开发环境,而该模块调用了Xilinx软件开发环境中的部分模块,导致本模块不能在此次的Quartus ii开发环境中进行仿真。
因此本模块没有进行仿真。
camera_fifo:功能说明:FIFO是先入先出存储器,本模块将来自camera_io_calc 模块的数据进行暂时存储,以便将数据在wishbone主设备的控制下通过camera_wb_if(wishbone总线)模块传输到wishbone从设备中。
仿真图:图6.6仿真结果分析:由上图,可以看出,本模块采用的是双时钟,亦即模块存在异步时钟域,这是FIFO的典型结构。
一种USB与DSP指纹识别系统的设计实现

一种USB与DSP指纹识别系统的设计实现图1 硬件原理框架图通过图像获得指纹图像及数字化输出,将图像数据传递给中心处理芯片DSP。
DSP对图像举行实时处理,如:滤波、图像的平滑锐化、二值化、特征点提取等,同时将处理结果通过USB输出到上位机。
在囫囵指纹图像采集处理系统中,DSP主要有三个方面的作用:通过其I2C总线对OV6620的对照度、亮度、锐度等各项参数举行设置;对指纹图像举行数字处理;根据USB的规范应答,提供设备识别,固化PDIUSBDl2,与上位机通信。
2 系统硬件计划挑选与设计2.1 图像传感器图像传感器是近几年进展较快的新型图像传感器,可以将像素阵列与外围支持集成在同一块芯片上,是一个完整的图像系统。
与CCD产品相比较其功耗小、体积小、成本低。
在采集系统中,用法OV6620作为图像采集芯片。
OV6620是Omni Vision 公司开发的CMOS黑白图像采集芯片。
该芯片将CMOS光感应核与外围支持电路集成在一起。
输出的视频为黑白图像。
技术参数:辨别率352x288,速度30帧/秒。
2.2 数字信号处理芯片本系统中采纳了TI公司推出的高性能数字信号处理器TMS320VC5402。
其采纳程序空间与数据空间彻低自立的哈佛总线结构,命令的执行采纳流水线结构,内部有一到多个处理内核,带有片上硬件乘法器,其命令执行速度最快为几十纳秒,处理能力为100。
这些为DSP在高速大数据量的数据采集处理系统中提供了广大的应用空间。
片内共有8条总线(4条程序存储器总线、1条数据存储器总线和3条地址总线)、片上存储器和片上外围电路等硬件,有高度专业化的命令系统,具有功耗低、高度并行等优点。
2.3 USB接口芯片第1页共3页。
单目OV6620数字摄像头在视觉测距中的应用
单目OV6620数字摄像头在视觉测距中的应用
马其华;张春燕;任洪娟;倪俊;蔡龄丰
【期刊名称】《机械设计与制造》
【年(卷),期】2011(000)002
【摘要】单目摄像测距系统在对固定目标的测距中具有精确、灵敏的特点.介绍了使用OV6620数字摄像头借助激光三角测距法实现对目标物的测距原理及实现过程.通过试验证明,该系统在一定条件下可实现有效测距.
【总页数】3页(P71-73)
【作者】马其华;张春燕;任洪娟;倪俊;蔡龄丰
【作者单位】上海工程技术大学,汽车工程学院,上海,201620;上海工程技术大学,机械工程学院,上海,201620;上海工程技术大学,汽车工程学院,上海,201620;上海工程技术大学,汽车工程学院,上海,201620;上海工程技术大学,汽车工程学院,上
海,201620
【正文语种】中文
【中图分类】TH16;TK31
【相关文献】
1.应用 OV6620数字摄像头实现小车的智能控制 [J], 杨家树;庄志红;郁春丽;杨欢欢;顾开祥
2.单目机器视觉测距技术在无人机自动着舰中的应用 [J], 杨迎化;唐大全
3.基于OV7725单目摄像头的激光测距系统 [J], 雷海东;兰慧;蔡桢荻;胡占尧
4.基于单目摄像头的地面测距方法 [J], 黄成龙;周钰峰;孙慧妮;孟恺;李恪尧
5.基于单目摄像头的地面测距方法 [J], 黄成龙;周钰峰;孙慧妮;孟恺;李恪尧
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Ov6620的图像采集系统的设计
基于Ov6620的图像采集系统的设计
赵伟;吴正博;曾志辉
【期刊名称】《自动化与仪器仪表》
【年(卷),期】2012()6
【摘要】数字图像处理技术在电子与通信领域得到了飞速发展,视频图像的出现极大的提高了工程实现的效率。
本文设计了基于飞思卡尔MC9S12XS128单片机及OV6620数字摄像头的视频图像采集系统,实现了无线监测系统的图像采集、图像
处理及图像显示。
文中针对图像去噪处理功能,对相应的图像滤波算法进行了阐述。
实验表明,该系统可以满足图像监测的需要。
【总页数】2页(P82-83)
【关键词】ov6620;飞思卡尔MC9S12xx;图像采集与图像处理;滤波算法
【作者】赵伟;吴正博;曾志辉
【作者单位】中南林业科技大学计算机与信息工程学院
【正文语种】中文
【中图分类】TN384
【相关文献】
1.基于WinCE&CMOS图像传感器的人脸图像采集系统设计 [J], 陈岩;刘谱;吴静珠;王克栋;郭宏
2.基于CMOS数字图像传感器的图像采集系统的设计 [J], 李桂英;陈磊
3.基于视频采集的超声图像采集系统设计实现 [J], 侯庆锋;李月卿;王昌元;张军毅
4.基于CMOS图像传感器的高实时远程图像采集系统设计 [J], 严明;李刚;杨少华;高帅;郭明安;李斌康
5.基于PCI总线的CMOS图像传感器OV6620的驱动设计 [J], 董岩;张涛;李清军;李文明;贾继强;陈浠惠
因版权原因,仅展示原文概要,查看原文内容请购买。
基于OV2640模块的网络视频监控系统设计

基于OV2640模块的网络视频监控系统设计
熊雪艳;梁光胜;赖程鹏;郝建红
【期刊名称】《单片机与嵌入式系统应用》
【年(卷),期】2015(15)12
【摘要】基于OV2640摄像头模块设计了一种网络视频监控系统,由视频监控节点、服务器、PC客户端和安卓客户端组成.视频监控节点由STM32F407VE控制器、DP83848以太网模块、OV2640摄像头模块构成,控制器在程序中调用LwIP协议栈的RAW API,实现将TCP网络数据上传至服务器.PC客户端或安卓客户端通过网络登录到服务器后,即可获得实时监控视频.运行测试表明,系统具有视频质量好、占用网络带宽小、成本低、多平台和多终端监控的诸多优点.
【总页数】4页(P23-26)
【作者】熊雪艳;梁光胜;赖程鹏;郝建红
【作者单位】华北电力大学电气与电子工程学院,北京102206;华北电力大学电气
与电子工程学院,北京102206;华北电力大学电气与电子工程学院,北京102206;华
北电力大学电气与电子工程学院,北京102206
【正文语种】中文
【中图分类】TP393
【相关文献】
1.基于RTP的机载网络视频实时监控系统设计 [J], 郝朝;王灏
2.基于数字媒体DSP的远程网络视频监控系统设计 [J], 刘勃宏
3.基于ARM平台的智慧社区网络视频监控系统设计 [J], 蒋佳;袁校柠;孙大方
4.基于Hi3531DV100的网络视频监控系统设计 [J], 梁瑞头;薛丙龙;李鹏
5.基于Hi3531DV100的网络视频监控系统设计 [J], 梁瑞头;薛丙龙;李鹏
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要SOPC是Altera公司提出来的一种灵活高效的SOC解决方案,它将处理器、存储器、I/O口、LVDS等系统设计需要的功能模块集成到一个可编程器件上,构成一个可编程的片上系统。
Nios II是建立在FPGA上的嵌入式软核处理器,有很强的灵活性。
而作为体现Nios II灵活性的两个最主要方面的自定义外设和自定义指令,则越来越受到人们的关注。
本文研究以SOPC Builder为平台,设计基于Avalon总线的从外设OV6620数字摄像头的IP软核控制器。
论文首先介绍了SOPC技术,其次介绍了OV6620的特性,最后重点论述了如何设计从外设的底层硬件描述及软件驱动程序。
该设计在实验箱上完成并得到了正确的结果。
关键词SOPC;Nios II;自定义外设;OV6620数字摄像头AbstractSOPC (System On Programmable Chip) is a flexible, efficient solution which is developed by Altera corporation. It could build a SOC design by integrating processor, memory, I/O, LVDS and other peripherals into one chip, on which forms a programmable system.The Nios II processor is a configurable soft-core processor which is based on the FPGA. As the most important respects of this technology, the custom peripheral and instructions have been paid more and more attention.The design of a custom component, ov6620 controller of Nios II IP soft-core, is discussed based on the Avalon bus architecture, which uses SOPC Builder as a platform. Firstly the technology of SOPC was introduced. Next the characteristic of ov6620 digital camera was talked about .Finally, how to design a slave Avalon interface from hardware to software is emphasized. This design has been completed in the experimental box and got the right result on test.Key Word SOPC; Nios II; custom peripheral; OV6620 digital camera目录摘要 .................................................................................................................................... - 1 -ABSTRACT ...................................................................................................................... - 2 -1. 引言 ............................................................................................................................... - 4 -2. SOPC技术简介............................................................................................................. - 5 -2.1SOPC技术 (5)2.2N IOS II软核处理器 (7)2.2.1 Nios II软核处理器简介................................................................................... - 7 -2.2.2 Nios II嵌入式的软硬件开发流程................................................................... - 7 -2.3A V ALON 总线. (9)2.3.1 Avalon总线简介............................................................................................... - 9 -2.3.2 本设计中使用的接口信号 .............................................................................. - 9 -2.4定制用户外设简介. (10)2.4.1 元件的组成部分............................................................................................ - 10 -2.4.2 元件的组成模块............................................................................................ - 10 -2.4.3 元件的定制步骤............................................................................................ - 10 -3. OV6620数字摄像头介绍 ........................................................................................... - 12 -3.1OV6620简介 (12)3.2OV6620引脚介绍 (12)3.3图像的采集过程 (13)3.4摄像头的配置状态 (14)3.5其他状态 (14)4. OV6620控制器外设的设计过程 ............................................................................... - 15 -4.1硬件功能的规划 (15)4.2使用VHDL来描述硬件逻辑 (15)4.3自定义元件的封装 (16)4.4编写测试元件的C文件 (19)4.5验证结果 (21)5. 总结 ............................................................................................................................. - 22 -附录1 ............................................................................................................................... - 23 -附录2 ............................................................................................................................... - 27 -参考文献 .......................................................................................................................... - 28 -1. 引言将IP硬核直接植入FPGA的解决方案存在很大的不足,例如设计者无法根据实际需要改变处理器的总线规模、接口方式、指令形式等结构,而如果利用软核处理器,就能有效的弥补以上的不足。
Altera公司提供的Nios II 软核处理器是用户可随意配置和构建的32位嵌入式处理器IP核,采用Avalon总线结构通信接口。
在把Nios II植入FPGA前,用户可以根据设计要求,利用Quartus II和SOPC Builder对Nios II及其外设进行构建,使该系统在硬件结构、功能特点、资源占用等方面满足用户系统设计的要求。
在通常情况下,用户可以从供应商提供的IP库中选择组件来组装系统。
当所提供的组件不能满足用户的要求时,由于Nios II软核处理器具有自定义的功能,用户可以通过自定义逻辑来实现所要求的功能,体现了强大的设计灵活性。
本文在介绍了SOPC相关知识和OV6620的主要特性的基础上主要论述了OV6620数字摄像头控制器自定义外设的设计方法,所做的工作有:1.使用VHDL编写硬件逻辑,描述怎样对OV6620数字摄像头进行控制驱动,其中主要做的是对SCCB协议的描述;2.使用SOPC Builder元件编辑器来对编写的硬件逻辑元件进行封装,生成一个自定义元件;3.建立一个完整的SOPC Builder system,包含一个OV6620数字摄像头控制器元件及其他必要的测试外设。
4.编写验证控制器件的C程序,通过UART发送图像数据到上位机,并通过SCCB对摄像头进行配置,观察数据是否符合配置要求,验证结果的正确性。
通过以上过程,完成一个可以直接控制OV6620数字摄像头的IP核,并给出了一个简单的通过Nios II处理器控制该核的程序,以方便其它相关项目的使用。
2. SOPC技术简介2.1 SOPC技术在集成电路(IC)发展初期,电路设计主要是器件的物理版图设计。