Assignment on root locus plot
自动化专业英语常用词汇

自动化专业英语常用词汇acceleration transducer 加速度传感器accumulated error 累积误差AC-DC-AC frequency converter交-直-交变频器AC (alternating current) electric drive 交流电子传动active attitude stabilization 主动姿态稳定adjoint operator 伴随算子admissible error 容许误差amplifying element 放大环节analog-digital conversion 模数转换operational amplifiers运算放大器aperiodic decomposition 非周期分解approximate reasoning 近似推理a priori estimate 先验估计articulated robot 关节型机器人asymptotic stability 渐进稳定性attained pose drift 实际位姿漂移attitude acquisition 姿态捕获AOCS (attitude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度attitude disturbance 姿态扰动automatic manual station 自动-手动操作器automaton 自动机base coordinate system 基座坐标系bellows pressure gauge 波纹管压力表 gauge测量仪器black box testing approach 黑箱测试法bottom-up development 自下而上开发boundary value analysis 边界值分析brainstorming method 头脑风暴法CAE (computer aided engineering) 计算机辅助工程CAM (computer aided manufacturing) 计算机辅助制造capacitive displacement transducer 电容式位移传感器capacity电容 displacement 位移capsule pressure gauge 膜盒压力表rectangular coordinate system直角坐标系cascade compensation 串联补偿using series or parallel capacitors用串联或者并联的电容chaos 混沌calrity 清晰性classical information pattern 经典信息模式classifier 分类器clinical control system 临床控制系统closed loop pole 闭环极点 open loop 开环closed loop transfer function 闭环传递函数c ombined pressure and vacuum gauge 压力真空表command pose 指令位姿companion matrix 相伴矩阵compatibility 相容性,兼容性compensating network 补偿网络Energy is conserved in all of its forms能量是守恒的compensation 补偿,矫正conditionally instability 条件不稳定性configuration 组态connectivity 连接性conservative system 守恒系统consistency 一致性constraint condition 约束条件control accuracy 控制精度Gyroscope陀螺仪control panel 控制屏,控制盘control system synthesis 控制系统综合corner frequency 转折频率coupling of orbit and attitude 轨道和姿态耦合critical damping 临界阻尼临界criticalDamper阻尼器critical stability 临界稳定性cross-over frequency 穿越频率,交越频率cut-off frequency 截止频率cybernetics 控制论cyclic remote control 循环遥控 cycle 循环 cycliccylindrical robot 圆柱坐标型机器人damped oscillation 阻尼振荡oscillation 振荡;振动;摆动damper 阻尼器damping ratio 阻尼比 ratio 比data acquisition 数据采集data preprocessing 数据预处理data processor 数据处理器D controller 微分控制器微分控制:Differential control 积分控制:integral control 比例控制:proportional controldescribing function 描述函数desired value 希望值真值:truth values 参考值:reference value destination 目的站detector 检出器deviation 偏差deviation alarm 偏差报警器differential dynamical system 微differential pressure level meter 差压液位计 meter=gauge 仪表 differential 差别的微分的differential pressure transmitter 差压变送器differential transformer displacement transducer 差动变压器式位移传感器differentiation element 微分环节digital filer 数字滤波器 filter 滤波器digital signal processing 数字信号处理dimension transducer 尺度传感器discrete system simulation language 离散系统仿真语言 discrete离散的不连续的displacement vibration amplitude transducer 位移振幅传感器幅度:amplitudedistrubance 扰动disturbance compensation 扰动补偿diversity 多样性divisibility 可分性domain knowledge 领域知识dominant pole 主导极点零点zero调制:modulation ;modulate 解调:demodulationcountermodulationduty ratio负载比dynamic characteristics 动态特性dynamic deviation 动态偏差dynamic error coefficient 动态误差系数dynamic input-output model 动态投入产出模型Index指数eddy current thickness meter 电涡流厚度计 meter 翻译成计 gauge 翻译成表electric conductance level meter 电导液位计electromagnetic flow transducer 电磁流量传感器electronic batching scale 电子配料秤 scale 秤electronic belt conveyor scale 电子皮带秤electronic hopper scale 电子料斗秤elevation 仰角 depression 俯角equilibrium point 平衡点error 误差estimate 估计量estimation theory 估计理论expected characteristics 希望特性failure diagnosis 故障诊断feasibility study 可行性研究feasible 可行的feasible region 可行域feature detection 特征检测feature extraction 特征抽取feedback compensation 反馈补偿Feed forward path 前馈通路前馈:feed forward 反馈feedbackFMS (flexible manufacturing system) 柔性制造系统柔性:flexible 刚性:rigidity bending deflection 弯曲挠度 deflect 偏向偏离flow sensor/transducer 流量传感器flow transmitter 流量变送器forward path 正向通路frequency converter 变频器frequency domain model reduction me thod 频域模型降阶法频域frequency response 频域响应functional decomposition 功能分解FES (functional electrical stimulation) 功能电刺激stimulate 刺激functional simularity 功能相似fuzzy logic模糊逻辑generalized least squares estimation 广义最小二乘估计geometric similarity 几何相似global optimum 全局最优goal coordination method 目标协调法graphic search 图搜索guidance system 制导系统gyro drift rate 陀螺漂移率gyrostat 陀螺体Hall displacement transducer 霍尔式位移传感器horizontal decomposition横向分解hydraulic step motor 液压步进马达I controller 积分控制器 integral 积分identifiability 可辨识性image recognition 图像识别impulse 冲量impulse function 冲击函数,脉冲函数index of merit 品质因数 index 指数inductive force transducer 电感式位移传感器感应的inductive 电感:inductance industrial automation 工业自动化inertial attitude sensor 惯性姿态敏感器inertial coordinate system 惯性坐标系information acquisition 信息采集infrared gas analyzer 红外线气体分析器 infrared 红外线红外线的ultraviolet ray紫外线的 visible light可见光inherent nonlinearity 固有非线性inherent regulation 固有调节initial deviation 初始偏差input-output model 投入产出模型instability 不稳定性integrity 整体性intelligent terminal 智能终端internal disturbance 内扰invariant embedding principle 不变嵌入原理inverse Nyquist diagram 逆奈奎斯特图investment decision 投资决策joint 关节knowledge acquisition 知识获取knowledge assimilation 知识同化knowledge representation 知识表达lag-lead compensation 滞后超前补偿Laplace transform 拉普拉斯变换large scale system 大系统least squares criterion 最小二乘准则 criterion 准则linearization technique 线性化方法linear motion electric drive 直线运动电气传动linear motion valve 直行程阀linear programming 线性规划load cell 称重传感器local optimum 局部最优local 局部log magnitude-phase diagram 对数幅相图magnitude大小的程度amplitude振幅long term memory 长期记忆Lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理magnetoelastic weighing cell 磁致弹性称重传感器magnitude-frequency characteristic 幅频特性magnitude margin 幅值裕度 margin 边缘magnitude scale factor 幅值比例尺manipulator 机械手man-machine coordination 人机协调MAP (manufacturing automation protocol) 制造自动化协议 protocol 协议marginal effectiveness 边际效益Mason‘‘s gain formula 梅森增益公式matching criterion 匹配准则maximum likelihood estimation 最大似然估计maximum overshoot 最大超调量maximum principle 极大值原理mean-square error criterion 均方误差准则minimal realization 最小实现minimum phase system 最小相位系统minimum variance estimation 最小方差估计model reference adaptive control system 模型参考适应控制系统model verification 模型验证modularization 模块化MTBF (mean time between failures) 平均故障间隔时间 mean 平均MTTF (mean time to failures) 平均无故障时间multiloop control 多回路控制multi-objective decision 多目标决策Nash optimality 纳什最优性nearest-neighbor 最近邻necessity measure 必然性侧度negative feedback 负反馈neural assembly 神经集合neural network computer 神经网络计算机Nichols chart 尼科尔斯图Nyquist stability criterion 奈奎斯特稳定判据objective function 目标函数on-line assistance 在线帮助on-off control 通断控制optic fiber tachometer 光纤式转速表optimal trajectory 最优轨迹optimization technique 最优化技术order parameter 序参数orientation control 定向控制oscillating period 振荡周期周期:period cycleoutput prediction method 输出预估法oval wheel flowmeter 椭圆齿轮流量计Over damping 过阻尼underdamping 欠阻尼PR (pattern recognition) 模式识别P control 比例控制器peak time 峰值时间penalty function method 罚函数法perceptron 感知器phase lead 相位超前 phase lag相位滞后Photoelectri c光电 tachometric transducer 光电式转速传感器piezoelectric force transducer 压电式力传感器PLC (programmable logic controller) 可编程序逻辑控制器plug braking 反接制动pole assignment 极点配置pole-zero cancellation 零极点相消polynomial input 多项式输入portfolio theory 投资搭配理论pose overshoot 位姿过调量position measuring instrument 位置测量仪posentiometric displacement transducer 电位器式位移传感器positive feedback 正反馈power system automation 电力系统自动化pressure transmitter 压力变送器primary frequency zone 主频区priority 优先级process-oriented simulation 面向过程的仿真proportional control 比例控制proportional plus derivative controller 比例微分控制器pulse duration 脉冲持续时间pulse frequency modulation control system 脉冲调频控制系统:frequency modulation 频率调制调频pulse width modulation control system 脉冲调宽控制系统PWM inverter 脉宽调制逆变器QC (quality control) 质量管理quantized noise 量化噪声ramp function 斜坡函数random disturbance 随机扰动random process 随机过程rate integrating gyro 速率积分陀螺real time telemetry 实时遥测receptive field 感受野rectangular robot 直角坐标型机器人redundant information 冗余信息regional planning model 区域规划模型regulating device 调节装载regulation 调节relational algebra 关系代数remote regulating 遥调reproducibility 再现性resistance thermometer sensor 热电阻电阻温度计传感器response curve 响应曲线return difference matrix 回差矩阵return ratio matrix 回比矩阵revolute robot 关节型机器人revolution speed transducer 转速传感器rewriting rule 重写规则rigid spacecraft dynamics 刚性航天动力学 dynamics 动力学robotics 机器人学robot programming language 机器人编程语言robust control 鲁棒控制robustness 鲁棒性root locus 根轨迹roots flowmeter 腰轮流量计rotameter 浮子流量计,转子流量计sampled-data control system 采样控制系统sampling control system 采样控制系统saturation characteristics 饱和特性scalar Lyapunov function 标量李雅普诺夫函数s-domain s域self-operated controller 自力式控制器self-organizing system 自组织系统self-reproducing system 自繁殖系统self-tuning control 自校正控制sensing element 敏感元件sensitivity analysis 灵敏度分析sensory control 感觉控制sequential decomposition 顺序分解sequential least squares estimation 序贯最小二乘估计servo control 伺服控制,随动控制servomotor 伺服马达settling time 过渡时间sextant 六分仪short term planning 短期计划short time horizon coordination 短时程协调signal detection and estimation 信号检测和估计signal reconstruction 信号重构similarity 相似性simulated interrupt 仿真中断simulation block diagram 仿真框图simulation experiment 仿真实验simulation velocity 仿真速度simulator 仿真器single axle table 单轴转台single degree of freedom gyro 单自由度陀螺翻译顺序呵呵spin axis 自旋轴spinner 自旋体stability criterion 稳定性判据stability limit 稳定极限stabilization 镇定,稳定state equation model 状态方程模型state space description 状态空间描述static characteristics curve 静态特性曲线station accuracy 定点精度stationary random process 平稳随机过程statistical analysis 统计分析statistic pattern recognition 统计模式识别steady state deviation 稳态偏差顺序翻译即可steady state error coefficient 稳态误差系数step-by-step control 步进控制step function 阶跃函数strain gauge load cell 应变式称重传感器subjective probability 主观频率supervisory computer control system 计算机监控系统sustained oscillation 自持振荡swirlmeter 旋进流量计switching point 切换点systematology 系统学system homomorphism 系统同态system isomorphism 系统同构system engineering 系统工程tachometer 转速表target flow transmitter 靶式流量变送器task cycle 作业周期temperature transducer 温度传感器tensiometer 张力计texture 纹理theorem proving 定理证明therapy model 治疗模型thermocouple 热电偶thermometer 温度计thickness meter 厚度计three-axis attitude stabilization 三轴姿态稳定three state controller 三位控制器thrust vector control system 推力矢量控制系统thruster 推力器time constant 时间常数time-invariant system 定常系统,非时变系统 invariant不变的time schedule controller 时序控制器time-sharing control 分时控制time-varying parameter 时变参数top-down testing 自上而下测试TQC (total quality control) 全面质量管理tracking error 跟踪误差trade-off analysis 权衡分析transfer function matrix 传递函数矩阵transformation grammar 转换文法transient deviation 瞬态偏差短暂的瞬间的transient process 过渡过程transition diagram 转移图transmissible pressure gauge 电远传压力表transmitter 变送器trend analysis 趋势分析triple modulation telemetering system 三重调制遥测系统turbine flowmeter 涡轮流量计Turing machine 图灵机two-time scale system 双时标系统ultrasonic levelmeter 超声物位计unadjustable speed electric drive 非调速电气传动unbiased estimation 无偏估计underdamping 欠阻尼uniformly asymptotic stability 一致渐近稳定性uninterrupted duty 不间断工作制,长期工作制unit circle 单位圆unit testing 单元测试unsupervised learing 非监督学习upper level problem 上级问题urban planning 城市规划value engineering 价值工程variable gain 可变增益,可变放大系数variable structure control system 变结构控制vector Lyapunov function 向量李雅普诺夫函数function 函数velocity error coefficient 速度误差系数velocity transducer 速度传感器vertical decomposition 纵向分解vibrating wire force transducer 振弦式力传感器vibrometer 振动计 vibrationVibrate振动viscous damping 粘性阻尼voltage source inverter 电压源型逆变器vortex precession flowmeter 旋进流量计vortex shedding flowmeter 涡街流量计WB (way base) 方法库weighing cell 称重传感器weighting factor 权因子weighting method 加权法Whittaker-Shannon sampling theorem 惠特克-香农采样定理Wiener filtering 维纳滤波w-plane w平面zero-based budget 零基预算zero-input response 零输入响应zero-state response 零状态响应z-transform z变换《信号与系统》专业术语中英文对照表第 1 章绪论信号(signal)系统(system)电压(voltage)电流(current)信息(information)电路(circuit)确定性信号(determinate signal)随机信号(random signal)一维信号(one–dimensional signal)多维信号(multi–dimensional signal)连续时间信号(continuous time signal)离散时间信号(discrete time signal)取样信号(sampling signal)数字信号(digital signal)周期信号(periodic signal)非周期信号(nonperiodic(aperiodic) signal)能量(energy)功率(power)能量信号(energy signal)功率信号(power signal)平均功率(average power)平均能量(average energy)指数信号(exponential signal)时间常数(time constant)正弦信号(sine signal)余弦信号(cosine signal)振幅(amplitude)角频率(angular frequency)初相位(initial phase)频率(frequency)欧拉公式(Euler’s formula)复指数信号(complex exponential signal)复频率(complex frequency)实部(real part)虚部(imaginary part)抽样函数 Sa(t)(sampling(Sa) function)偶函数(even function)奇异函数(singularity function)奇异信号(singularity signal)单位斜变信号(unit ramp signal)斜率(slope)单位阶跃信号(unit step signal)符号函数(signum function)单位冲激信号(unit impulse signal)广义函数(generalized function)取样特性(sampling property)冲激偶信号(impulse doublet signal)奇函数(odd function)偶分量(even component)偶数 even 奇数 odd 奇分量(odd component)正交函数(orthogonal function)正交函数集(set of orthogonal function)数学模型(mathematics model)电压源(voltage source)基尔霍夫电压定律(Kirchhoff’s voltage law(KVL))电流源(current source)连续时间系统(continuous time system)离散时间系统(discrete time system)微分方程(differential function)差分方程(difference function)线性系统(linear system)非线性系统(nonlinear system)时变系统(time–varying system)时不变系统(time–invariant system)集总参数系统(lumped–parameter system)分布参数系统(distributed–parameter system)偏微分方程(partial differential function)因果系统(causal system)非因果系统(noncausal system)因果信号(causal signal)叠加性(superposition property)均匀性(homogeneity)积分(integral)输入–输出描述法(input–output analysis)状态变量描述法(state variable analysis)单输入单输出系统(single–input and single–output system)状态方程(state equation)输出方程(output equation)多输入多输出系统(multi–input and multi–output system)时域分析法(time domain method)变换域分析法(transform domain method)卷积(convolution)傅里叶变换(Fourier transform)拉普拉斯变换(Laplace transform)第 2 章连续时间系统的时域分析齐次解(homogeneous solution)特解(particular solution)特征方程(characteristic function)特征根(characteristic root)固有(自由)解(natural solution)强迫解(forced solution)起始条件(original condition)初始条件(initial condition)自由响应(natural response)强迫响应(forced response)零输入响应(zero-input response)零状态响应(zero-state response)冲激响应(impulse response)阶跃响应(step response)卷积积分(convolution integral)交换律(exchange law)分配律(distribute law)结合律(combine law)第3 章傅里叶变换频谱(frequency spectrum)频域(frequency domain)三角形式的傅里叶级数(trigonomitric Fourier series)指数形式的傅里叶级数(exponential Fourier series)傅里叶系数(Fourier coefficient)直流分量(direct component)基波分量(fundamental component) component 分量n 次谐波分量(n th harmonic component)复振幅(complex amplitude)频谱图(spectrum plot(diagram))幅度谱(amplitude spectrum)相位谱(phase spectrum)包络(envelop)离散性(discrete property)谐波性(harmonic property)收敛性(convergence property)奇谐函数(odd harmonic function)吉伯斯现象(Gibbs phenomenon)周期矩形脉冲信号(periodic rectangular pulse signal)直角的周期锯齿脉冲信号(periodic sawtooth pulse signal)周期三角脉冲信号(periodic triangular pulse signal)三角的周期半波余弦信号(periodic half–cosine signal)周期全波余弦信号(periodic full–cosine signal)傅里叶逆变换(inverse Fourier transform)inverse 相反的频谱密度函数(spectrum density function)单边指数信号(single–sided exponential signal)双边指数信号(two–sided exponential signal)对称矩形脉冲信号(symmetry rectangular pulse signal)线性(linearity)对称性(symmetry)对偶性(duality)位移特性(shifting)时移特性(time–shifting)频移特性(frequency–shifting)调制定理(modulation theorem)调制(modulation)解调(demodulation)变频(frequency conversion)尺度变换特性(scaling)微分与积分特性(differentiation and integration)时域微分特性(differentiation in the time domain)时域积分特性(integration in the time domain)频域微分特性(differentiation in the frequency domain)频域积分特性(integration in the frequency domain)卷积定理(convolution theorem)时域卷积定理(convolution theorem in the time domain)频域卷积定理(convolution theorem in the frequency domain)取样信号(sampling signal)矩形脉冲取样(rectangular pulse sampling)自然取样(nature sampling)冲激取样(impulse sampling)理想取样(ideal sampling)取样定理(sampling theorem)调制信号(modulation signal)载波信号(carrier signal)已调制信号(modulated signal)模拟调制(analog modulation)数字调制(digital modulation)连续波调制(continuous wave modulation)脉冲调制(pulse modulation)幅度调制(amplitude modulation)频率调制(frequency modulation)相位调制(phase modulation)角度调制(angle modulation)频分多路复用(frequency–division multiplex(FDM))时分多路复用(time–division multiplex(TDM))相干(同步)解调(synchronous detection)本地载波(local carrier)载波系统函数(system function)网络函数(network function)频响特性(frequency response)幅频特性(amplitude frequency response)幅频响应相频特性(phase frequency response)无失真传输(distortionless transmission)理想低通滤波器(ideal low–pass filter)截止频率(cutoff frequency)正弦积分(sine integral)上升时间(rise time)窗函数(window function)理想带通滤波器(ideal band–pass filter)太直译了第 4 章拉普拉斯变换代数方程(algebraic equation)双边拉普拉斯变换(two-sided Laplace transform)双边拉普拉斯逆变换(inverse two-sided Laplace transform)单边拉普拉斯变换(single-sided Laplace transform)拉普拉斯逆变换(inverse Laplace transform)收敛域(region of convergence(ROC))延时特性(time delay)s 域平移特性(shifting in the s-domain)s 域微分特性(differentiation in the s-domain)s 域积分特性(integration in the s-domain)初值定理(initial-value theorem)终值定理(expiration-value)复频域卷积定理(convolution theorem in the complex frequency domain)部分分式展开法(partial fraction expansion)留数法(residue method)第 5 章策动点函数(driving function)转移函数(transfer function)极点(pole)零点(zero)零极点图(zero-pole plot)暂态响应(transient response)稳态响应(stable response)稳定系统(stable system)一阶系统(first order system)高通滤波网络(high-pass filter)低通滤波网络(low-pass filter)二阶系统(second order system)最小相位系统(minimum-phase system)高通(high-pass)带通(band-pass)带阻(band-stop)有源(active)无源(passive)模拟(analog)数字(digital)通带(pass-band)阻带(stop-band)佩利-维纳准则(Paley-Winner criterion)最佳逼近(optimum approximation)过渡带(transition-band)通带公差带(tolerance band)巴特沃兹滤波器(Butterworth filter)切比雪夫滤波器(Chebyshew filter)方框图(block diagram)信号流图(signal flow graph)节点(node)支路(branch)输入节点(source node)输出节点(sink node)混合节点(mix node)通路(path)开通路(open path)闭通路(close path)环路(loop)自环路(self-loop)环路增益(loop gain)不接触环路(disconnect loop)前向通路(forward path)前向通路增益(forward path gain)梅森公式(Mason formula)劳斯准则(Routh criterion)第 6 章数字系统(digital system)数字信号处理(digital signal processing)差分方程(difference equation)单位样值响应(unit sample response)卷积和(convolution sum)Z 变换(Z transform)序列(sequence)样值(sample)单位样值信号(unit sample signal)单位阶跃序列(unit step sequence)矩形序列 (rectangular sequence)单边实指数序列(single sided real exponential sequence)单边正弦序列(single sided exponential sequence)斜边序列(ramp sequence)复指数序列(complex exponential sequence)线性时不变离散系统(linear time-invariant discrete-time system)常系数线性差分方程(linear constant-coefficient difference equation)后向差分方程(backward difference equation)前向差分方程(forward difference equation)海诺塔(Tower of Hanoi)菲波纳西(Fibonacci)冲激函数串(impulse train)第 7 章数字滤波器(digital filter)单边 Z 变换(single-sided Z transform)双边 Z 变换(two-sided (bilateral) Z transform)幂级数(power series)收敛(convergence)有界序列(limitary-amplitude sequence)正项级数(positive series)有限长序列(limitary-duration sequence)右边序列(right-sided sequence)左边序列(left-sided sequence)双边序列(two-sided sequence)Z 逆变换(inverse Z transform)围线积分法(contour integral method)幂级数展开法(power series expansion)z 域微分(differentiation in the z-domain)序列指数加权(multiplication by an exponential sequence)z 域卷积定理(z-domain convolution theorem)帕斯瓦尔定理(Parseval theorem)传输函数(transfer function)序列的傅里叶变换(discrete-time Fourier transform:DTFT)序列的傅里叶逆变换(inverse discrete-time Fourier transform:IDTFT)幅度响应(magnitude response)相位响应(phase response)量化(quantization)编码(coding)模数变换(A/D 变换:analog-to-digital conversion)数模变换(D/A 变换:digital-to- analog conversion)第 8 章端口分析法(port analysis)状态变量(state variable)无记忆系统(memoryless system)有记忆系统(memory system)矢量矩阵(vector-matrix )常量矩阵(constant matrix )输入矢量(input vector)输出矢量(output vector)直接法(direct method)间接法(indirect method)状态转移矩阵(state transition matrix)系统函数矩阵(system function matrix)冲激响应矩阵(impulse response matrix)光学专业词汇大全Accelaration 加速度Myopia-near-sighted近视Sensitivity to Light感光灵敏度boost推进lag behind落后于Hyperopic-far-sighted远视visual sensation视觉ar Pattern条状图形approximate近似adjacent邻近的normal法线Color Difference色差V Signal Processing电视信号处理back and forth前后vibrant震动quantum leap量子越迁derive from起源自inhibit抑制,约束stride大幅前进obstruction障碍物substance物质实质主旨residue杂质criteria标准parameter参数parallax视差凸面镜 convex mirror凹面镜 concave mirror分光镜spectroscope入射角 angle of incidence出射角emergent angle平面镜 plane mirror放大率角度放大率angular magnification 放大率:magnification 折射 refraction反射 reflect干涉 interfere衍射 diffraction干涉条纹interference fringe衍射图像 diffraction fringe衍射条纹偏振polarize polarization透射transmission透射光 transmission light光强度] light intensity电磁波 electromagnetic wave振动杨氏干涉夫琅和费衍射焦距brewster Angle布鲁斯特角quarter Waveplates四分之一波片ripple波纹capacitor电容器vertical垂直的horizontal 水平的airy disk艾里斑exit pupil出[射光]瞳Entrance pupil 入瞳optical path difference光称差radius of curvature曲率半径spherical mirror球面镜reflected beam反射束YI= or your information供参考phase difference相差interferometer干涉仪ye lens物镜/目镜spherical球的field information场信息standard Lens标准透镜refracting Surface折射面principal plane主平面vertex顶点,最高点fuzzy失真,模糊light source 光源wavelength波长angle角度spectrum光谱diffraction grating衍射光栅sphere半球的DE= ens data editor Surface radius of curvature表面曲率半径surface thickness表面厚度semi-diameter半径focal length焦距field of view视场stop 光阑refractive折射reflective反射金属切削 metal cutting机床 machine tool tool 机床金属工艺学 technology of metals刀具 cutter摩擦 friction传动 drive/transmission轴 shaft弹性 elasticity频率特性 frequency characteristic误差 error响应 response定位 allocation动力学 dynamic运动学 kinematic静力学 static分析力学 analyse mechanics 力学拉伸 pulling压缩 hitting compress剪切 shear扭转 twist弯曲应力 bending stress强度 intensity几何形状 geometricalUltrasonic超声波精度 precision交流电路 AC circuit机械加工余量 machining allowance变形力 deforming force变形 deformation应力 stress硬度 rigidity热处理 heat treatment电路 circuit半导体元件 semiconductor element反馈 feedback发生器 generator直流电源 DC electrical source门电路 gate circuit逻辑代数 logic algebra磨削 grinding螺钉 screw铣削 mill铣刀 milling cutter功率 power装配 assembling流体动力学 fluid dynamics流体力学 fluid mechanics加工 machining稳定性 stability介质 medium强度 intensity载荷 load应力 stress可靠性 reliability精加工 finish machining粗加工 rough machining腐蚀 rust氧化 oxidation磨损 wear耐用度 durability随机信号 random signal离散信号 discrete signal超声传感器 ultrasonic sensor摄像头 CCD cameraLead rail 导轨合成纤维 synthetic fibre电化学腐蚀 electrochemical corrosion 车架 automotive chassis悬架 suspension转向器 redirector变速器 speed changer车间 workshop工程技术人员 engineer数学模型 mathematical model标准件 standard component零件图 part drawing装配图 assembly drawing刚度 rigidity内力 internal force位移 displacement截面 section疲劳极限 fatigue limit断裂 fracture 破裂塑性变形 plastic distortionelastic deformation 弹性变形脆性材料 brittleness material刚度准则 rigidity criterion齿轮 gearGrain 磨粒转折频率 corner frequency =break frequencyConvolution 卷积Convolution integral 卷积积分Convolution property 卷积性质Convolution sum 卷积和Correlation function 相关函数Critically damped systems 临界阻尼系统Crosss-correlation functions 互相关函数Cutoff frequencies 截至频率transistor n 晶体管diode n 二极管semiconductor n 半导体resistor n 电阻器capacitor n 电容器alternating adj 交互的amplifier n 扩音器,放大器integrated circuit 集成电路linear time invariant systems 线性时不变系统voltage n 电压,伏特数Condenser=capacitor n 电容器dielectric n 绝缘体;电解质electromagnetic adj 电磁的adj 非传导性的deflection n偏斜;偏转;偏差linear device 线性器件the insulation resistance 绝缘电阻anode n 阳极,正极cathode n 阴极breakdown n 故障;崩溃terminal n 终点站;终端,接线端emitter n 发射器collect v 收集,集聚,集中insulator n 绝缘体,绝热器oscilloscope n 示波镜;示波器gain n 增益,放大倍数forward biased 正向偏置reverse biased 反向偏置P-N junction PN结MOS(metal-oxide semiconductor)金属氧化物半导体enhancement and exhausted 增强型和耗尽型integrated circuits 集成电路analog n 模拟digital adj 数字的,数位的horizontal adj, 水平的,地平线的vertical adj 垂直的,顶点的amplitude n 振幅,广阔,丰富multimeter n 万用表frequency n 频率,周率the cathode-ray tube 阴极射线管dual-trace oscilloscope 双踪示波器signal generating device 信号发生器peak-to-peak output voltage 输出电压峰峰值sine wave 正弦波triangle wave 三角波square wave 方波amplifier 放大器,扩音器oscillator n 振荡器feedback n 反馈,回应phase n 相,阶段,状态filter n 滤波器,过滤器rectifier n整流器;纠正者band-stop filter 带阻滤波器band-pass filter 带通滤波器decimal adj 十进制的,小数的hexadecimal adj/n十六进制的binary adj 二进制的;二元的octal adj 八进制的domain n 域;领域code n代码,密码,编码v编码the Fourier transform 傅里叶变换Fast Fourier Transform 快速傅里叶变换microcontroller n 微处理器;微控制器assembly language instrucions n 汇编语言指令chip n 芯片,碎片modular adj 模块化的;模数的sensor n 传感器plug vt堵,塞,插上n塞子,插头,插销coaxial adj 同轴的,共轴的fiber n 光纤relay contact 继电接触器Artificial Intelligence 人工智能Perceptive Systems 感知系统neural network 神经网络fuzzy logic 模糊逻辑intelligent agent 智能代理electromagnetic adj 电磁的coaxial adj 同轴的,共轴的microwave n 微波charge v充电,使充电insulator n 绝缘体,绝缘物nonconductive adj非导体的,绝缘的simulation n 仿真;模拟prototype n 原型array n 排队,编队vector n 向量,矢量inverse adj倒转的,反转的n反面;相反v倒转high-performance 高精确性,高性能two-dimensional 二维的;缺乏深度的three-dimensional 三维的;立体的;真实的object-oriented programming面向对象的程序设计spectral adj 光谱的distortion n 失真,扭曲,变形wavelength n 波长refractive adj 折射的ivision Multiplexing单工传输simplex transmission半双工传输half-duplex transmission全双工传输full-duplex transmission电路交换 circuit switching数字传输技术Digital transmission technology灰度图像Grey scale images灰度级Grey scale level幅度谱Magnitude spectrum相位谱Phase spectrum频谱frequency spectrum相干解调coherent demodulation coherent相干的数字图像压缩digital image compression图像编码image encoding量化quantization人机交互man machine interface交互式会话Conversational interaction路由算法Routing Algorithm目标识别Object recognition话音变换Voice transform中继线trunk line传输时延transmission delay远程监控remote monitoring光链路optical linkhalf-duplex transmission 半双工传输accompaniment 伴随物,附属物reservation 保留,预定quotation 报价单,行情报告,引语memorandum 备忘录redundancy 备用be viewed as 被看作…be regards as 被认为是as such 本身;照此;以这种资格textual 本文的,正文的variation 变化,变量conversion 变化,转化。
第4章 利用MATLAB绘制系统根轨迹
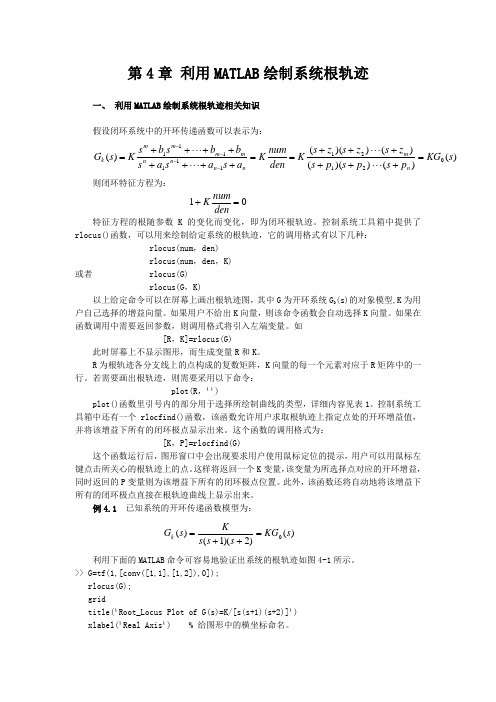
第4章 利用MATLAB 绘制系统根轨迹一、 利用MATLAB 绘制系统根轨迹相关知识假设闭环系统中的开环传递函数可以表示为:)()())(()())(()(021********s KG p s p s p s z s z s z s K den numK a s a s a s b b s b s K s G n m nn n n m m m m k =+⋅⋅⋅+++⋅⋅⋅++==++⋅⋅⋅++++⋅⋅⋅++=---- 则闭环特征方程为: 01=+dennumK特征方程的根随参数K 的变化而变化,即为闭环根轨迹。
控制系统工具箱中提供了rlocus()函数,可以用来绘制给定系统的根轨迹,它的调用格式有以下几种:rlocus(num ,den) rlocus(num ,den ,K) 或者 rlocus(G) rlocus(G ,K)以上给定命令可以在屏幕上画出根轨迹图,其中G 为开环系统G 0(s)的对象模型,K 为用户自己选择的增益向量。
如果用户不给出K 向量,则该命令函数会自动选择K 向量。
如果在函数调用中需要返回参数,则调用格式将引入左端变量。
如[R ,K]=rlocus(G)此时屏幕上不显示图形,而生成变量R 和K 。
R 为根轨迹各分支线上的点构成的复数矩阵,K 向量的每一个元素对应于R 矩阵中的一行。
若需要画出根轨迹,则需要采用以下命令:plot(R ,¹¹)plot()函数里引号内的部分用于选择所绘制曲线的类型,详细内容见表1。
控制系统工具箱中还有一个rlocfind()函数,该函数允许用户求取根轨迹上指定点处的开环增益值,并将该增益下所有的闭环极点显示出来。
这个函数的调用格式为:[K ,P]=rlocfind(G)这个函数运行后,图形窗口中会出现要求用户使用鼠标定位的提示,用户可以用鼠标左键点击所关心的根轨迹上的点。
这样将返回一个K 变量,该变量为所选择点对应的开环增益,同时返回的P 变量则为该增益下所有的闭环极点位置。
Feedback-Control-11

(s p1)(s p2 ) (s z1)(s z2 )
(s pn ) K (s zm)
where
G(s)H (s) K(s z1)(s z2 ) (s zm ) is open loop TF.
(s p1)(s p2 ) (s pn )
第17页,共50页。
Terminus
of open loop TF. Thus, each locus originates at a pole of open loop TF
(designated by ×’s) and the number of individual loci is equal to n,
the number of poles of open loop TF.
• The locus crosses the imaginary axis(与虚轴交点)
第15页,共50页。
Basic Rules
• n branches which start from open poles • m branches terminate at open-loop zeros • n-m branches go to infinity along asymptotes • The loci symmetrical about the real axis. • The number of zeros and poles of open loop TF
As c increase, the roots move along a circle and meet at -1
After breakin point, the roots move off to infinity and open-loop
完整word版,《自动控制原理》试卷及答案(英文10套),推荐文档

AUTOMATIC CONTROL THEOREM (1)⒈ Derive the transfer function and the differential equation of the electric network⒉ Consider the system shown in Fig.2. Obtain the closed-loop transfer function)()(S R S C , )()(S R S E . (12%) ⒊ The characteristic equation is given 010)6(5)(123=++++=+K S K S S S GH . Discuss the distribution of the closed-loop poles. (16%)① There are 3 roots on the LHP ② There are 2 roots on the LHP② There are 1 roots on the LHP ④ There are no roots on the LHP . K=?⒋ Consider a unity-feedback control system whose open-loop transfer function is )6.0(14.0)(++=S S S S G . Obtain the response to a unit-step input. What is the rise time for this system? What is the maximum overshoot? (10%)Fig.15. Sketch the root-locus plot for the system )1()(+=S S K S GH . ( The gain K is assumed to be positive.)① Determine the breakaway point and K value.② Determine the value of K at which root loci cross the imaginary axis.③ Discuss the stability. (12%)6. The system block diagram is shown Fig.3. Suppose )2(t r +=, 1=n . Determine the value of K to ensure 1≤e . (12%)Fig.37. Consider the system with the following open-loop transfer function:)1)(1()(21++=S T S T S K S GH . ① Draw Nyquist diagrams. ② Determine the stability of the system for two cases, ⑴ the gain K is small, ⑵ K is large. (12%)8. Sketch the Bode diagram of the system shown in Fig.4. (14%)⒈212121121212)()()(C C S C C R R C S C C R S V S V ++++=⒉ 2423241321121413211)()(H G H G G G G G G G H G G G G G G G S R S C ++++++=⒊ ① 0<K<6 ② K ≤0 ③ K ≥6 ④ no answer⒋⒌①the breakaway point is –1 and –1/3; k=4/27 ② The imaginary axis S=±j; K=2③⒍5.75.3≤≤K⒎ )154.82)(181.34)(1481.3)(1316.0()11.0(62.31)(+++++=S S S S S S GHAUTOMATIC CONTROL THEOREM (2)⒈Derive the transfer function and the differential equation of the electric network⒉ Consider the equation group shown in Equation.1. Draw block diagram and obtain the closed-loop transfer function )()(S R S C . (16% ) Equation.1 ⎪⎪⎩⎪⎪⎨⎧=-=-=--=)()()()()]()()([)()]()()()[()()()]()()[()()()(3435233612287111S X S G S C S G S G S C S X S X S X S G S X S G S X S C S G S G S G S R S G S X⒊ Use Routh ’s criterion to determine the number of roots in the right-half S plane for the equation 0400600226283)(12345=+++++=+S S S S S S GH . Analyze stability.(12% )⒋ Determine the range of K value ,when )1(2t t r ++=, 5.0≤SS e . (12% )Fig.1⒌Fig.3 shows a unity-feedback control system. By sketching the Nyquist diagram of the system, determine the maximum value of K consistent with stability, and check the result using Routh ’s criterion. Sketch the root-locus for the system (20%)(18% )⒎ Determine the transfer function. Assume a minimum-phase transfer function.(10% )⒈1)(1)()(2122112221112++++=S C R C R C R S C R C R S V S V⒉ )(1)()(8743215436324321G G G G G G G G G G G G G G G G S R S C -+++=⒊ There are 4 roots in the left-half S plane, 2 roots on the imaginary axes, 0 root in the RSP. The system is unstable.⒋ 208<≤K⒌ K=20⒍⒎ )154.82)(181.34)(1481.3)(1316.0()11.0(62.31)(+++++=S S S S S S GHAUTOMATIC CONTROL THEOREM (3)⒈List the major advantages and disadvantages of open-loop control systems. (12% )⒉Derive the transfer function and the differential equation of the electric network⒊ Consider the system shown in Fig.2. Obtain the closed-loop transfer function)()(S R S C , )()(S R S E , )()(S P S C . (12%)⒋ The characteristic equation is given 02023)(123=+++=+S S S S GH . Discuss the distribution of the closed-loop poles. (16%)5. Sketch the root-locus plot for the system )1()(+=S S K S GH . (The gain K is assumed to be positive.)④ Determine the breakaway point and K value.⑤ Determine the value of K at which root loci cross the imaginary axis. ⑥ Discuss the stability. (14%)6. The system block diagram is shown Fig.3. 21+=S K G , )3(42+=S S G . Suppose )2(t r +=, 1=n . Determine the value of K to ensure 1≤SS e . (15%)7. Consider the system with the following open-loop transfer function:)1)(1()(21++=S T S T S K S GH . ① Draw Nyquist diagrams. ② Determine the stability of the system for two cases, ⑴ the gain K is small, ⑵ K is large. (15%)⒈ Solution: The advantages of open-loop control systems are as follows: ① Simple construction and ease of maintenance② Less expensive than a corresponding closed-loop system③ There is no stability problem④ Convenient when output is hard to measure or economically not feasible. (For example, it would be quite expensive to provide a device to measure the quality of the output of a toaster.)The disadvantages of open-loop control systems are as follows:① Disturbances and changes in calibration cause errors, and the output may be different from what is desired.② To maintain the required quality in the output, recalibration is necessary from time to time.⒉ 1)(1)()()(2122112221122112221112+++++++=S C R C R C R S C R C R S C R C R S C R C R S U S U ⒊351343212321215143211)()(H G G H G G G G H G G H G G G G G G G G S R S C +++++= 35134321232121253121431)1()()(H G G H G G G G H G G H G G H G G H G G G G S P S C ++++-+=⒋ R=2, L=1⒌ S:①the breakaway point is –1 and –1/3; k=4/27 ② The imaginary axis S=±j; K=2⒍5.75.3≤≤KAUTOMATIC CONTROL THEOREM (4)⒈ Find the poles of the following )(s F :se s F --=11)( (12%)⒉Consider the system shown in Fig.1,where 6.0=ξ and 5=n ωrad/sec. Obtain the rise time r t , peak time p t , maximum overshoot P M , and settling time s t when the system is subjected to a unit-step input. (10%)⒊ Consider the system shown in Fig.2. Obtain the closed-loop transfer function)()(S R S C , )()(S R S E , )()(S P S C . (12%)⒋ The characteristic equation is given 02023)(123=+++=+S S S S GH . Discuss the distribution of the closed-loop poles. (16%)5. Sketch the root-locus plot for the system )1()(+=S S K S GH . (The gain K is assumed to be positive.)⑦ Determine the breakaway point and K value.⑧ Determine the value of K at which root loci cross the imaginary axis.⑨ Discuss the stability. (12%)6. The system block diagram is shown Fig.3. 21+=S K G , )3(42+=S S G . Suppose )2(t r +=, 1=n . Determine the value of K to ensure 1≤SS e . (12%)7. Consider the system with the following open-loop transfer function:)1)(1()(21++=S T S T S K S GH . ① Draw Nyquist diagrams. ② Determine the stability of the system for two cases, ⑴ the gain K is small, ⑵ K is large. (12%)8. Sketch the Bode diagram of the system shown in Fig.4. (14%)⒈ Solution: The poles are found from 1=-s e or 1)sin (cos )(=-=-+-ωωσωσj e e j From this it follows that πωσn 2,0±== ),2,1,0(K =n . Thus, the poles are located at πn j s 2±=⒉Solution: rise time sec 55.0=r t , peak time sec 785.0=p t ,maximum overshoot 095.0=P M ,and settling time sec 33.1=s t for the %2 criterion, settling time sec 1=s t for the %5 criterion.⒊ 351343212321215143211)()(H G G H G G G G H G G H G G G G G G G G S R S C +++++= 35134321232121253121431)1()()(H G G H G G G G H G G H G G H G G H G G G G S P S C ++++-+=⒋R=2, L=15. S:①the breakaway point is –1 and –1/3; k=4/27 ② The imaginary axis S=±j; K=2⒍5.75.3≤≤KAUTOMATIC CONTROL THEOREM (5)⒈ Consider the system shown in Fig.1. Obtain the closed-loop transfer function )()(S R S C , )()(S R S E . (18%)⒉ The characteristic equation is given 0483224123)(12345=+++++=+S S S S S S GH . Discuss the distribution of the closed-loop poles. (16%)⒊ Sketch the root-locus plot for the system )15.0)(1()(++=S S S K S GH . (The gain K is assumed to be positive.)① Determine the breakaway point and K value.② Determine the value of K at which root loci cross the imaginary axis. ③ Discuss the stability. (18%)⒋ The system block diagram is shown Fig.2. 1111+=S T K G , 1222+=S T K G . ①Suppose 0=r , 1=n . Determine the value of SS e . ②Suppose 1=r , 1=n . Determine the value of SS e . (14%)⒌ Sketch the Bode diagram for the following transfer function. )1()(Ts s K s GH +=, 7=K , 087.0=T . (10%)⒍ A system with the open-loop transfer function )1()(2+=TS s K S GH is inherently unstable. This system can be stabilized by adding derivative control. Sketch the polar plots for the open-loop transfer function with and without derivative control. (14%)⒎ Draw the block diagram and determine the transfer function. (10%)⒈∆=321)()(G G G S R S C ⒉R=0, L=3,I=2⒋①2121K K K e ss +-=②21211K K K e ss +-= ⒎11)()(12+=RCs s U s UAUTOMATIC CONTROL THEOREM (6)⒈ Consider the system shown in Fig.1. Obtain the closed-loop transfer function )()(S R S C , )()(S R S E . (18%)⒉The characteristic equation is given 012012212010525)(12345=+++++=+S S S S S S GH . Discuss thedistribution of the closed-loop poles. (12%)⒊ Sketch the root-locus plot for the system )3()1()(-+=S S S K S GH . (The gain K is assumed to be positive.)① Determine the breakaway point and K value.② Determine the value of K at which root loci cross the imaginary axis. ③ Discuss the stability. (15%)⒋ The system block diagram is shown Fig.2. SG 11=, )125.0(102+=S S G . Suppose t r +=1, 1.0=n . Determine the value of SS e . (12%)⒌ Calculate the transfer function for the following Bode diagram of the minimum phase. (15%)⒍ For the system show as follows, )5(4)(+=s s s G ,1)(=s H , (16%) ① Determine the system output )(t c to a unit step, ramp input.② Determine the coefficient P K , V K and the steady state error to t t r 2)(=.⒎ Plot the Bode diagram of the system described by the open-loop transfer function elements )5.01()1(10)(s s s s G ++=, 1)(=s H . (12%)w⒈32221212321221122211)1()()(H H G H H G G H H G G H G H G H G G G S R S C +-++-+-+= ⒉R=0, L=5 ⒌)1611()14)(1)(110(05.0)(2s s s s s s G ++++= ⒍t t e e t c 431341)(--+-= t t e e t t c 41213445)(---+-= ∞=P K , 8.0=V K , 5.2=ss eAUTOMATIC CONTROL THEOREM (7)⒈ Consider the system shown in Fig.1. Obtain the closed-loop transfer function)()(S R S C , )()(S R S E . (16%)⒉ The characteristic equation is given 01087444)(123456=+--+-+=+S S S S S S S GH . Discuss the distribution of the closed-loop poles. (10%)⒊ Sketch the root-locus plot for the system 3)1()(S S K S GH +=. (The gain K is assumed to be positive.)① Determine the breakaway point and K value.② Determine the value of K at which root loci cross the imaginary axis. ③ Discuss the stability. (15%)⒋ Show that the steady-state error in the response to ramp inputs can be made zero, if the closed-loop transfer function is given by:nn n n n n a s a s a s a s a s R s C +++++=---1111)()(Λ ;1)(=s H (12%)⒌ Calculate the transfer function for the following Bode diagram of the minimum phase.(15%)w⒍ Sketch the Nyquist diagram (Polar plot) for the system described by the open-loop transfer function )12.0(11.0)(++=s s s S GH , and find the frequency and phase such that magnitude is unity. (16%)⒎ The stability of a closed-loop system with the following open-loop transfer function )1()1()(122++=s T s s T K S GH depends on the relative magnitudes of 1T and 2T . Draw Nyquist diagram and determine the stability of the system.(16%) ( 00021>>>T T K )⒈3213221132112)()(G G G G G G G G G G G G S R S C ++-++=⒉R=2, I=2,L=2 ⒌)1()1()(32122++=ωωωs s s s G⒍o s rad 5.95/986.0-=Φ=ωAUTOMATIC CONTROL THEOREM (8)⒈ Consider the system shown in Fig.1. Obtain the closed-loop transfer function)()(S R S C , )()(S R S E . (16%)⒉ The characteristic equation is given 04)2(3)(123=++++=+S K KS S S GH . Discuss the condition of stability. (12%)⒊ Draw the root-locus plot for the system 22)4()1()(++=S S KS GH ;1)(=s H .Observe that values of K the system is overdamped and values of K it is underdamped. (16%)⒋ The system transfer function is )1)(21()5.01()(s s s s K s G +++=,1)(=s H . Determine thesteady-state error SS e when input is unit impulse )(t δ、unit step )(1t 、unit ramp t and unit parabolic function221t . (16%)⒌ ① Calculate the transfer function (minimum phase);② Draw the phase-angle versus ω (12%) w⒍ Draw the root locus for the system with open-loop transfer function.)3)(2()1()(+++=s s s s K s GH (14%)⒎ )1()(3+=Ts s Ks GH Draw the polar plot and determine the stability of system. (14%)⒈43214321432143211)()(G G G G G G G G G G G G G G G G S R S C -+--+= ⒉∞ππK 528.0⒊S:0<K<0.0718 or K>14 overdamped ;0.0718<K<14 underdamped⒋S: )(t δ 0=ss e ; )(1t 0=ss e ; t K e ss 1=; 221t ∞=ss e⒌S:21ωω=K ; )1()1()(32121++=ωωωωs s ss GAUTOMATIC CONTROL THEOREM (9)⒈ Consider the system shown in Fig.1. Obtain the closed-loop transfer function)(S C , )(S E . (12%)⒉ The characteristic equation is given0750075005.34)(123=+++=+K S S S S GH . Discuss the condition of stability. (16%)⒊ Sketch the root-locus plot for the system )1(4)()(2++=s s a s S GH . (The gain a isassumed to be positive.)① Determine the breakaway point and a value.② Determine the value of a at which root loci cross the imaginary axis. ③ Discuss the stability. (12%)⒋ Consider the system shown in Fig.2. 1)(1+=s K s G i , )1()(2+=Ts s Ks G . Assumethat the input is a ramp input, or at t r =)( where a is an arbitrary constant. Show that by properly adjusting the value of i K , the steady-state error SS e in the response to ramp inputs can be made zero. (15%)⒌ Consider the closed-loop system having the following open-loop transfer function:)1()(-=TS S KS GH . ① Sketch the polar plot ( Nyquist diagram). ② Determine thestability of the closed-loop system. (12%)⒍Sketch the root-locus plot. (18%)⒎Obtain the closed-loop transfer function )()(S R S C . (15%)⒈354211335421243212321313542143211)1()()(H G G G G H G H G G G G H G G G G H G G H G H G G G G G G G G G S R S C --++++-= 354211335421243212321335422341)()(H G G G G H G H G G G G H G G G G H G G H G H G G G H H G S N S E --+++--= ⒉45.30ππK⒌S: N=1 P=1 Z=0; the closed-loop system is stable ⒎2423241321121413211)()(H G H G G G G G G G H G G G G G G G S R S C ++++++=AUTOMATIC CONTROL THEOREM (10)⒈ Consider the system shown in Fig.1. Obtain the closed-loop transfer function)()(S R S C ,⒉ The characteristic equation is given01510520)(1234=++++=+S S KS S S GH . Discuss the condition of stability. (14%)⒊ Consider a unity-feedback control system whose open-loop transfer function is)6.0(14.0)(++=S S S S G . Obtain the response to a unit-step input. What is the rise time forthis system? What is the maximum overshoot? (10%)⒋ Sketch the root-locus plot for the system )25.01()5.01()(s S s K S GH +-=. (The gain K isassumed to be positive.)③ Determine the breakaway point and K value.④ Determine the value of K at which root loci cross the imaginary axis. Discuss the stability. (15%)⒌ The system transfer function is )5(4)(+=s s s G ,1)(=s H . ①Determine thesteady-state output )(t c when input is unit step )(1t 、unit ramp t . ②Determine theP K 、V K and a K , obtain the steady-state error SS e when input is t t r 2)(=. (12%)⒍ Consider the closed-loop system whose open-loop transfer function is given by:①TS K S GH +=1)(; ②TS K S GH -=1)(; ③1)(-=TS KS GH . Examine the stabilityof the system. (15%)⒎ Sketch the root-locus plot 。
常见的英语缩略词
常见的英语缩略词外贸常见英文缩略词1 C&F(cost&freight)成本加运费价的2 T/T(telegraphic transfer)电汇51Test3 D/P(document against payment)付款交单4 D/A (document against acceptance)承兑交单51Test5 C.O (certificate of origin)一般原产地证的6 G.S.P.(generalized system of preferences)普惠制51Test7 CTN/CTNS(carton/cartons)纸箱51Test8 PCE/PCS(piece/pieces)只、的个、的`支等51Test9 DL/DLS(dollar/dollars)美元51Test10 DOZ/DZ(dozen)一打11 PKG(package)一包,一捆,一扎,一件等12 WT(weight)重量51Test13 G.W.(gross weight)毛重51Test14 N.W.(net weight)净重51Test15 C/D (customs declaration)报关单51Test16 EA(each)每个,各的17 W (with)具有51Test18 w/o(without)没有51Test19 FAC(facsimile)传真51Test20 IMP(import)进口51Test21 EXP(export)出口51Test22 MAX (maximum)最大的、的最大限度的51Test23 MIN (minimum)最小的,最低限度51Test24 M 或MED (medium)中等,中级的51Test25 M/V(merchant vessel)商船51Test26 S.S(steamship)船运51Test27 MT或M/T(metric ton)公吨51Test28 DOC (document)文件、的单据51Test29 INT(international)国际的51Test30 P/L (packing list)装箱单、的明细表a-g aa.a.r against all risks 全险a/c account 帐目a/c account current 往来帐目acc acceptance;accepted 承兑;已承兑a.g.b a good brand 任何名牌a/o account of 记入…帐目a.p. additional premium 附加保险a.r. all risks 全险a/s;acc/s account sales 售货清单av;a/v average 平均数bbb bill book 出纳簿b/d bank draft 银行汇票bd. bond 债券bds. boards 董事会b/e bill of exchange 汇票bk. bank book 帐簿bkg. banking 银行业b/l bill of lading 提货单b.p.b bank post bill 银行汇票br bank rate 银行贴现率b/r;b.r. bill receivable 应收票据b.s;b.s. balance sheet 资产负债表bt bought 购入cc currency,coupon 现金,息单c/a capital account 资本帐户cad cash against document 凭单付款canclg. cancelling 取消cat. catalogue 目录cb cash book 现金簿cd cash dividend 现金折扣c.d. cum dividend 付股息报关单c and d collection and delivery 收款发货cert. certificate 证明c/f carried forward 转下页cge. carriage 运费ch custom house 海关ch.ppd charges prepaid 预付费c/l certificate insurance 保险证明书c&l cost and insurance 保险费在内价cif cost,insurance and freight 到岸价格c/o cash order 现金汇票c.o.t. change over to 转入cod cash on delivery 货到付款cont. contract 合同cr. credit 货方ctge cartage 车费cur. current 本月;现付cwo cash with order 订货即付款cy. currency 货币dd/c. deviation 贴现dd. delivered 交付de. deferred 延期deg. degree 等级dft. draft 汇票div dividend;division 红利;部门d/n debit note 欠单;借项清单dols. dollars 美元d/p documents against payment 付款交单dr. debtor drawer 债务人,借方d.r. dock receipt 存款收条d/w deposit warrant 码头仓单dely. delivery 交付eea. each 每e.d. ex dividend 股息除外eq. equivalent 等值exd. examined 已检查exs. expenses 费用ffob free on board 离岸价格f/o for order 准备出售f.p;fp fully paid 付讫frt. freight 运费ggrs.wt gross weight 毛重g.t.c. good till cancelled 未注销前有效h-zhhp horse power 马力h.p.n. horse power nominal 标称马力iib invoice book 发票簿ib ibidem(in the same place) 同前;出处同上id idem(the same) 同上i.e. id est(that is) 即,就是i/l import licence 进口许可证int. interest 利息inv. invoice 发票iou i owe you 借据,欠条jj/a joint account 共同帐户ll/c letter of credit 信用证led. ledger 总帐簿lip life insurance policy 人寿保险单ls locus sigil(place of seal) 盖印处mma my account 本人帐户m/c marginal credit 限界信贷m/d memorandum of deposit 存款单min minimum,minute 最低额;分钟mks. marks 商标mo money order 邮汇mos. months 月nne;n/e no effects 无存款n/d no dated 未注明日期n/f.n.f no funds 无款nm no mark 无商标;无标志np notary public 公证人ooa on account of 因为o/d on demand 见票即付ppa private account 私人帐户p/c price current 时价表pc. prices;piece 价格;个p.c.b petty cash book 零用现金簿pkg. package 包裹p/n promissory note 期票po postal order 汇票pob post office box 邮政信箱ppd. prepaid 预付pref. preference or preferred 优先prox. proximo(of the next month) 下月(拉) p.t.o. please turn over 转下页qq.v. quod vide(which see) 请查阅q.y. query 查核rr/d refer to drawer(banking) 请与出票接洽re. with referece to 关于recd. received 收到r.i. reinsurance 再保险r.l receipt for a loan 借据;欠条rsvp reply please 候复sect. section 部分sgd signed 已签署shr. share 股份std. standard 标准,本价stk. stock 存货,股票ttmo telegraph 电汇票tt;t/t telegraphic transfers 电汇汇票vv;vs versus(against) 对,相反vid vide(see) 参阅viz. videlicet(namely) 即v.i vending list 售货清单ww.r.t. with regard to 关于W weight ton; winter mark for load line; won 重量吨;(船舶)冬季装载线标记;(韩国)元W., w. warehouse; watt; weight; width; week 仓库;瓦特;钟量;宽;星期W.A. with average 水渍险,保单独海损险W.A.I.O.P. W.A. irrespective of percentage 单独海损不计免赔率,单独海损全赔WAG wagon 卡车WAN Wide Area Networks 泛区网络WASH Washington; washer 华盛顿;洗衣机WB, W.B. waybill 运送单WB World Bank 世界银行W.B. water ballast (以)水压载,水压舱W.B.S. without benefit to/of salvage 不享有获救财产的利益w.c., W.C. without charge; water closet 免费;洗手间WCG working capital guarantee 流动资金担保WCO World Customs Organization 世界海关组织WD when distributed (股票)发售时交割wd. warrented (品质)保证的wdth. width 广度,宽度Wed Wednesday 星期三WEF World Economic Forum 世界经济论坛W.E.T. Western European Time 西欧时间,即格林尼治时间wf. wharf 码头WFOE wholly foreign owned enterprises 外资独资企业W.G., w.g. weight guaranteed 保证质量WH watt-hour 每小时瓦特WHO World Health Organization 世界卫生组织whs, whse. warehouse 仓库whsle wholesale 批发WI when issued (股票)发行时交割WIP work in progress=goods in progress 在制品wk week; work 星期;工作Wky. weekly 每星期的,周刊wmk watermark 水印Wmk. water mark 水位标记WP weather permitting; word processing 天气允许;文字处理W.P. without prejudice 不损害(当事人)权利W.P.A. with particular average=with average 水渍险W.P.M. words per minute (电传)每分钟字数W.P.P. waterproof paper packing 防潮纸包装W.R. war risk 战争险W.R.=W.W. warehouse receipt=warehouse warrant 仓单,仓库收据Wrap worldwide receivables assurance protection 全球应收账款担保措施WT warrant (股票)认证股WT watertight (包、盒)不漏水的,防水的wt., wgt. weight 重量WTO World Trade Organization 世界贸易组织W/Tax withholding tax 预扣税WW warehouse warrant; with warrants 仓库保证;附认股权w/w wall-to-wall 覆盖全部地面的(地毯)W/W warehouse-to-warehouse 仓至仓W/W clause warehouse-to-warehouse clause 仓至仓条款a accepted 承兑aa auditing administration (中国)审计署aaa 最佳等级abs. abstract 摘要a/c, a/c account 帐户、帐目a/c, a/c account current 往来帐户、活期存款帐户a&c addenda and corrigenda 补遗和勘误acc. acceptance or accepted 承兑accrd.int accrued interest 应计利息acct. account 帐户、帐目acct. accountant 会计师、会计员acct. accounting 会计、会计学account number 帐户编号、帐号acct.tit. account title 帐户名称、会计科目acn air consignment 航空托运单a/c no. account number 帐户编号、帐号acpt. acceptance or accepted 承兑a/cs pay. accounts payable 应付帐款a/cs rec. accounts receivable 应收帐款act advance corporation tax 预扣公司税acu asia currency unit 亚洲货币单位a.c.v actual cash value 实际现金价值a.d., a/d after date 开票后、出票后adrs asset depreciation range system 固定资产分组折旧法adv. advance 预付款ad.val.,a/v ad valorem to (according value) 从价agt. agent 代理人agt. agreement 协议、契约aje adjusting journal entries 调整分录amt. amount 金额、总数ann. annuity 年金a/p account paid 已付账款a/p account payable 应付帐款a/p accounting period 会计期间a/p advise and pay 付款通知a/r account receivable 应收帐款a/r at the rate of 以……比例a/r all risks (保险)全险arr. arrivals, arrived 到货、到船a/s, a/s after sight 见票即付a/s,acc/s account sales 承销帐、承销清单,售货清单asap as soon as possible 尽快asr acceptance summary report 验收ass. assessment 估征、征税assimt. assignment 转让、让与atc average total cost平均总成本atm at the money 仅付成本钱atm automatic teller machine 自动取款机(柜员机)ats automated trade system 自动交易系统ats automatic transfer service 自动转移服务attn. attention 注意atty. attorney 代理人auct. auction 拍卖aud. auditor 审计员、审计师av. average平均值a.w. all wool 纯羊毛a/w air waybill 空运提单a/w actual weight 实际重量电脑英语缩略词探讨本文分析电脑英语缩略词产生的。
MatLab讲义五:Root-locus Design
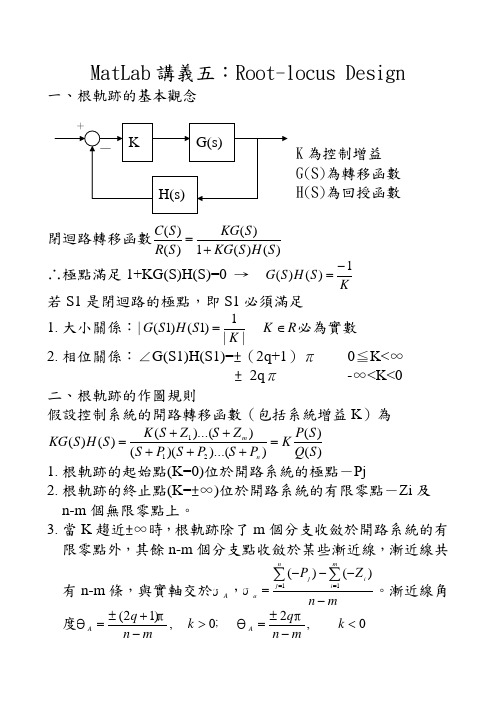
MatLab 講義五:Root-locus Design一、根軌跡的基本觀念K 為控制增益 G(S)為轉移函數H(S)為回授函數閉迴路轉移函數)()(1)()()(S H S KG S KG S R S C +=∴極點滿足1+KG(S)H(S)=0 → KS H S G 1)()(-=若S1是閉迴路的極點,即S1必須滿足1. 大小關係:||1)1()1(|K S H S G = R K ∈必為實數2. 相位關係:∠G(S1)H(S1)=±(2q+1)π 0≦K<∞ ± 2q π -∞<K<0 二、根軌跡的作圖規則假設控制系統的開路轉移函數(包括系統增益K )為)()())...()(())...(()()(211S Q S P KP S P S P S Z S Z S K S H S KG n m =+++++= 1. 根軌跡的起始點(K=0)位於開路系統的極點-Pj 2. 根軌跡的終止點(K=±∞)位於開路系統的有限零點-Zi 及n-m 個無限零點上。
3. 當K 趨近±∞時,根軌跡除了m 個分支收斂於開路系統的有限零點外,其餘n-m 個分支點收斂於某些漸近線,漸近線共有n-m 條,與實軸交於A σ,mn Z P nj mi i j a ----=∑∑==11)()(σ。
漸近線角度0,20,)12(<-±=>-+±=k mn q k m n q A A π; θ πθ 4. 根軌跡兩分支或兩分支以上相交的點稱為分離點。
分離點滿足0)()(=dSS H S dG 5. 根軌跡與S 平面上虛軸的交點,可由系統閉迴路方程式)()()(S KP S Q S +=∆建立羅斯表,令某列為零為K ,代入輔助方程解得純虛根即為所求。
二、根軌跡的推廣觀念與變化型1. 由特性方程式→改寫為1+KG(S)=0,定義G(S)為單位開迴路轉移函數,利用此來做根軌跡。
恩诺沙星在黄羽肉鸡组织中残留消除规律研究

用 UPLC-MS/MS方法测定乳酸恩诺沙星残留浓度。结果100mg/L 试验组(临床用药量)动物肌
肉、肝、肾 在 分 别 停 药 10、7、7d 后,药 物 残 留 量 才 低 于 最 高 残 留 限 量,分 别 为 0.055、0.178、
0.159mg/kg。结果表明临床用药量乳酸恩诺沙星对于黄羽肉鸡的休药期应在 10d以上。
12d
ND ND ND 0.012 0.002
ND 0.018 0.001
ND 0.076 0.088 0.006
15d
ND ND ND 0.001
ND
ND 0.002
ND
ND 0.013 0.021 ND
20d
ND ND ND ND
注:“ND”为未检出。残留标志物用 EFs表示
1 材 料 与 方 法
1.2 方 法
1.2.1 试验动物 分 组。 试 验 黄 羽 肉 鸡 分 为 试 验 组 和对照组,低、中、高 三 个 梯 度 剂 量 试 验 组 各 40 羽, 对 照 组 40 羽 。 1.2.2 饲养及 给 药 方 法。 笼 养,自 由 采 食 和 饮 水。 从50日龄开始,对 照 组 仅 饲 喂 基 础 日 粮;试 验 组 饮 水中分别以 50、100 和 200 mg/L 水 平 添 加 乳 酸 恩 诺 沙 星 ,连 续 给 药 7d 后 停 药 ,停 药 后 于 不 同 时 间 点 测定试验动物可食组织中 EFs残留量。 1.2.3 采 样。 于 停 药 后 0、3、5、7、8、9、10、12、15、 20d时间点从对照组和试验组各抽取 4 羽鸡,称 重 后立即屠宰,进行 取 样。 每 羽 鸡 各 取 胸 肌 和 腿 肌 约 25g、全肝、全肾,将样品编 号 后 置 于 -20 ℃ 冷 冻 保 存 ,待 测 。 1.2.4 样 品 前 处 理。 取 (5±0.02)g 经 切 碎 匀 浆 的畜禽可食 组 织 样 品,置 于 50 mL 具 塞 离 心 管 中, 加入约 5g 无 水 硫 酸 钠 和 20 mL 乙 腈,涡 旋 混 匀 2min,超声5min,以8 000r/min冷冻离心5 min。 将上层提取 液 转 移 至 100 mL 棕 色 鸡 心 瓶 中,残 渣
自动控制原理MATLAB仿真实验报告

实验一 典型环节的MATLAB 仿真 一、实验目的1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。
2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。
3.定性了解各参数变化对典型环节动态特性的影响。
二、实验内容① 比例环节1)(1=s G 和2)(1=s G ;Simulink 图形实现:示波器显示结果:② 惯性环节11)(1+=s s G 和15.01)(2+=s s GSimulink 图形实现:示波器显示结果:③ 积分环节s s G 1)(1Simulink 图形实现:示波器显示结果:④ 微分环节s s G )(1Simulink 图形实现:波器显示结果:⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G1)、G1(s )=s+2Simulink 图形实现:示波器显示结果:2)、G2(s)=s+1 Simulink图形实现:示波器显示结果:⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+=1)、G1(1)=1+1/sSimulink 图形实现:示波器显示结果:2)G2(s)=1+1/2s Simulink图形实现:示波器显示结果:三、心得体会通过这次实验我学到了很多,对课本内容加深了理解,熟悉MATLAB桌面和命令窗口,初步了解SIMULINK功能模块的使用方法,加深对各典型环节响应曲线的理解,这为对课程的学习打下了一定基础。
实验二线性系统时域响应分析一、实验目的1.熟练掌握step( )函数和impulse( )函数的使用方法,研究线性系统在单位阶跃、单位脉冲及单位斜坡函数作用下的响应。
2.通过响应曲线观测特征参量ζ和nω对二阶系统性能的影响。
3.熟练掌握系统的稳定性的判断方法。
二、实验内容1.观察函数step( )的调用格式,假设系统的传递函数模型为243237()4641s s G s s s s s ++=++++绘制出系统的阶跃响应曲线?2.对典型二阶系统222()2n n n G s s s ωζωω=++1)分别绘出2(/)n rad s ω=,ζ分别取0,0.25,0.5,1.0和2.0时的单位阶跃响应曲线,分析参数ζ对系统的影响,并计算ζ=0.25时的时域性能指标,,,,p r p s ss t t t e σ。
自动控制原理复习课(2)

和 ts ;
(1)二阶系统的标准形式为:
2 n Gk ( s) s( s 2n )
调节时间
ts 3 4
n
3 4 3s或4s ( 2%或4%) 0.5 2
4 ;则 n 2rad / s 比较上述两式, 2 n 2 则 0.5 (2)超调量 % e 100% 16%
U 0 ( s ) / Ui ( s )
。
则
U 0 ( s) R2 Ui ( s) R1 ( R2C2 s 1)
或无源网络:RC,RL及RLC等。(如作业)质量-弹簧-阻尼 、液位平衡等系统。
例2-2:简化图示系统的结构图,并求出传递函数 C(s) / R(s) 。 解:结构图经等效变换为下图:
自动控制原理复习课
二、控制系统的数学模型
1.微分方程、传递函数、差分方程频率特性 2.结构图、信号流图 电学、力学等。 熟悉典型环节的传递函数。
例2-1:求下图所示系统的传递函数 解:对于理想放大器
Ui ( s) 0 0 U 0 ( s) R1 z 其中z R2 1 R2C2 s
C ( s)
R( s )
-
2 n s( s 2 n )
C ( s)
kt s
1 kt s
n 2 ( s) s( s 2n )
与典型二阶系统的标准形式
n 2 (1 kt s) n 2 1 s( s 2 ) s 2 2( k / 2) s 2 n t n n n
10 K
所以在K=1时,系统的稳态误差为 ess ess1 ess 2 0.05
高中数学英语

高中数学英语篇一:高中数学英语专有名词元素clement 集合set 子集subset 真子集proper subset 空集empty set并集union set 交集intersection 全集universe set 补集plementary set有限集合Aで元素个数记做card(A)函数function 定义域domain 值域range 增函数increasing function减函数decreasing function 最大值maximum value 最小值minimum value偶函数even function 奇函数odd function n次方根n throot 根式radical指数radical exponent 开方数radicand 指数函数exponential function对数logarithm 常用对数mon logarithm 自然对数natural logarithm对数函数logarithm function 幂函数power function 零点zero point二分法bisection method平面plane 异面直线skew lines 二面角dihedral angle倾斜角angle of inclination 斜率slope圆的标准方程standard equation of circle 圆的一般方程general equation of circle算法algorithm 流程图flow chart 顺序结构sequence structure 条件结构selection structure 循环结构cyele structure 输入语句input statement 输出语句output statement赋值语句assignment statement必然事件certain event 不可能事件impossible event 随机事件random event概率probability简单随机抽样simple random sampling 系统抽样systematic sampling分层抽样stratified sampling散点图scatterplot 回归直线regression line 回归方程regression equation正角positive angle 负角negative angle 零角zero angle 限角quadrant angle角度制degree measure 弧度制radian measure 弧度radian 单位圆unit circle三角函数trigonometric function 周期函数periodic function 周期period最小正周期minimal positive period向量的乘数multiplication of vector by scalar 基底base 数量积inner product数列sequence of number可行解feasible solution 可行域feasible region篇二:中学数学英语词汇表数学英语词汇表· 一般词汇数学 mathematics, maths(BrE), math(AmE) ? 公理axiom ? 定理 theorem ? 计算 calculation ? 运算operation ? 证明 prove假设 hypothesis,hypotheses(pl.) ? 命题proposition ·算术 arithmetic 加 plus(prep.), add(v.), addition(n.)被加数 augend, summand ? 加数 addend ? 和 sum减 minus(prep.), subtract(v.), subtraction(n.) ? 被减数 minuend ? 减数 subtrahend ? 差 remainder乘 times(prep.), multiply(v.), multiplication(n.)被乘数 multiplicand, faciend ? 乘数 multiplicator ? 积 product除 divided by(prep.), divide(v.), division(n.) ? 被除数 dividend ? 除数 divisor ? 商 quotient等于 equals, is equal to, isequivalent to大于 is greater than ? 小于 is lesser than大于等于 is equal or greater than小于等于 is equal or lesserthan运算符 operator ? 数字 digit ? 数 number自然数 natural number ? 整数 integer ? 小数 decimal小数点 decimal point ? 分数 fraction ? 分子numerator ? 分母 denominator ? 比 ratio ? 正 positive ? 负 negative零 null, zero, nought, nil ? 十进制 decimal system ? 二进制 binary system十六进制 hexadecimal system ? 权 weight,significance ? 进位 carry截尾 truncation ? 四舍五入 round ? 下舍入 rounddown ? 上舍入 round up有效数字 significant digit ?无效数字 insignificant digit代数 algebra公式 formula, formulae(pl.) ? 单项式 monomial ? 多项式polynomial,multinomial系数 coefficient未知数 unknown, x-factor,y-factor, z-factor等式,方程式 equation ? 一次方程 simple equation ?二次方程 quadratic equation ? 三次方程 cubic equation ? 四次方程 quartic equation ? 不等式 inequation ? 阶乘factorial ? 对数 logarithm指数,幂 exponent ?乘方 power·二次方,平方 square ? 三次方,立方 cube四次方 the power of four, thefourth powern次方 the power of n, the nth虚数 imaginary number ? 复数 plex number ? 矩阵 matrix行列式 determinantpower· 几何 geometry开方 evolution, extraction二次方根,平方根 square root ? 三次方根,立方根 cube root ?四次方根 the root of four, thefourth rootn次方根 the root of n, the nthroot集合 aggregate ? 元素 element ? 空集 void ? 子集subset交集 intersection ? 并集 union补集 plement ? 映射 mapping ? 函数 function定义域 domain, field of definition ? 值域 range ? 常量 constant ? 变量 variable单调性 monotonicity ? 奇偶性 parity周期性 periodicity ? 图象 image数列,级数 series ? 微积分 calculus ? 微分differential ? 导数 derivative ? 极限 limit无穷大 infinite(a.) infinity(n.) ? 无穷小infinitesimal ? 积分 integral定积分 definite integral ? 不定积分 indefinite integral ? 有理数 rational number ? 无理数 irrational number ?实数 real number点 point ? 线 line ? 面 plane ? 体 solid线段 segment ? 射线 radial ? 平行 parallel ? 相交intersect ? 角 angle ? 角度 degree ? 弧度 radian锐角 acute angle ? 直角 right angle ? 钝角 obtuse angle ? 平角 straight angle ? 周角 perigon ? 底 base ? 边 side ? 高 height三角形 triangle锐角三角形 acute triangle ? 直角三角形 righttriangle ? 直角边 leg斜边 hypotenuse勾股定理 Pythagoreantheorem钝角三角形 obtuse triangle ? 不等边三角形 scalene triangle ? 等腰三角形 isosceles triangle ? 等边三角形equilateral triangle ? 四边形 quadrilateral平行四边形 parallelogram ? 矩形 rectangle ? 长length ? 宽 width菱形 rhomb, rhombus,rhombi(pl.), diamond ? 正方形 square梯形 trapezoid直角梯形 right trapezoid等腰梯形 isosceles trapezoid ? 五边形 pentagon ? 六边形 hexagon ? 七边形 heptagon ? 八边形 octagon ? 九边形 enneagon ? 十边形 decagon十一边形 hendecagon ? 十二边形 dodecagon ? 多边形polygon正多边形 equilateral polygon ? 圆 circle圆心 centre(BrE), center(AmE) ? 半径 radius ? 直径diameter ? 圆周率 pi ? 弧 arc半圆 semicircle ? 扇形 sector ? 环 ring椭圆 ellipse圆周 circumference ? 周长 perimeter ? 面积 area轨迹 locus, loca(pl.) ? 相似 similar ? 全等congruent ? 四面体 tetrahedron ? 五面体 pentahedron ? 六面体 hexahedron平行六面体 parallelepiped ? 立方体 cube七面体 heptahedron ? 八面体 octahedron ? 九面体enneahedron ? 十面体 decahedron十一面体 hendecahedron ? 十二面体 dodecahedron ? 二十面体 icosahedron ? 多面体 polyhedron ? 棱锥 pyramid ? 棱柱 prism棱台 frustum of a prism ? 旋转 rotation ? 轴 axis ? 圆锥 cone ? 圆柱 cylinder圆台 frustum of a cone ? 球 sphere半球 hemisphere ? 底面 undersurface ? 表面积 surface area ? 体积 volume ? 空间 space坐标系 coordinates坐标轴 x-axis, y-axis, z-axis ? 横坐标 x-coordinate ? 纵坐标 y-coordinate ? 原点 origin双曲线 hyperbola ? 抛物线 parabola三角 trigonometry正弦 sine ? 余弦 cosine ? 正切 tangent ? 余切cotangent ? 正割 secant ? 余割 cosecant ? 反正弦 arc sine ? 反余弦 arc cosine ? 反正切 arc tangent ? 反余切arc cotangent ? 反正割 arc secant ? 反余割 arc cosecant ? 相位 phase ? 周期 period ? 振幅 amplitude ?内心 incentre(BrE),incenter(AmE)外心 excentre(BrE), excenter(AmE) ? 旁心escentre(BrE), escenter(AmE)垂心 orthocentre(BrE),orthocenter(AmE)·重心 barycentre(BrE), 积分方程indicial equation 【数】指数方程indeterminate equation 不定方程数学专业英语Lesson 2Mathematics as a Language of Science assert vt. 断言;坚持主张;维护表barycenter(AmE)内切圆 inscribed circle ? 外切圆circumcircle · 统计 statistics平均数 average加权平均数 weighted average ? ? 方差 variance标准差 root-mean-squaredeviation, standard deviation ? 比例 propotion ? 百分比 percent ? 百分点 percentage ? 百分位数 percentile ? 排列 permutation ? 组合 bination概率,或然率 probability ? 分布 distribution正态分布 normal distribution ? 非正态分布 abnormaldistribution ? 图表 graph条形统计图 bar graph ? 柱形统计图 histogram折线统计图 broken line graph ? 曲线统计图 curve diagram ?扇形统计图 pie diagramwave equation 波动方程tangental equation 切线方程quartic equation 四次方程式quadratic equation 二次方程式magnitude equation 【天】星等差 linear equation 一次方程式irreducible equation 不可约方程 integral equation明qualitative adj. 性质的;定性的quantitative adj. 量的;数量的;定量的;与数量有关的astronomy n. 天文学postulate n. 假定, 基本条件, 基本原理 vt. 要求, 假定vi. 要求hypothetical adj. 假设的, 假定的,爱猜想的deduction n.减除, 扣除, 减除额, 推论, 演绎induction n. 归纳;归纳法;归纳所得之结论verification n. 验证;证实correlatevt. 使相互关联 vi. 和...相关discard vt. 丢弃, 抛弃 v. 放弃 discredit n. 不信任;失信consistent adj. 一致的, 调和的, 坚固的, [数、统]相容的inadequacy n. 不充分 ,不适当,不适合,不足额conic, conical adj 圆锥的;圆锥形的 ellipse n. 椭圆, 椭圆形 ellipt (n.) hyperbolic adj. 双曲线的 hyperbola (n.)parabolic adj. 用寓言表达的: 抛物线的,像抛物线的parabola (n.)algebraic adj. 代数的, 关于代数学的 mineralogy n. 矿物学 refraction n. 折光, 折射stimulus n. 刺激物, 促进因素, 刺激, 刺激impetus n. 冲力推动力;刺激Lesson 3Axioms, definitions and Theorems axiomn. [数]公理definition n. 阐明;确定定义;界说效航程, 范围, 界限circumferencen. 圆周, 周围Lesson 5extravagantadj. 奢侈的, 浪费的, 过分的, 放纵的collinearadj. 在同一直线上的, 同线的convex adj. 凸出的;凸面的segment n. 部分;片段;节, 弓形;圆缺;弧形, 线段conswquentlyadv. 从而, 因此 in terms ofadv. 根据, 按照, 用...的话, 在...方面pretensen. 主张, 要求, 伪称, 借口, 自称Lesson 4Geometry and Geometrical termsterm n. 学期, 期限, 期间, 条款, 条件, 术语triangle n. [数]三角形, 三人一组, 三角关系parallelogram n. 平行四边形 straight anglen.[数]平角 right angle n. 直角 acute anglen. 锐角 obtuse angle n. 钝角 reflex angle n. 优角rectilinear adj 直线的;由直线组成的;循直线进行的isosceles triangle n. 等腰三角形 equilateral triangle n. 等边三角形 right triangle n. 直角三角形 obtuse triangle n. 钝角三角形 acute trianglen. 锐角三角形equiangular trianglen. 正三角形,等角三角形hypotenuse n. (直角三角形的)斜边circle圆center 中心;中央;圆心 diametern. 直径radius n. 半径, 范围, 辐射光线, 有The Method of Limitslimitn. 限度,极限,极点 infinite adj. 无限的;无穷的infinitesimaladj. 无穷小的, 极小的, 无限小的calculusn. 微积分学, 结石exemplifyvt. 例证, 例示, 作为...例子inscribev. 记下polygon n. [数]多角形, 多边形 diminishv. (使)减少, (使)变小 curvilinear adj 曲线的, 由曲线组成的intuition n. 直觉, 直觉的知识integral n. [数学] 积分, 完整, 部分 defectiveadj. 有缺陷的, (智商或行为有)欠缺的differential coefficient 微分系数 arithmetical adj. 算术的, 算术上的 convergencen. 集中, 收敛criterionn. (批评判断的)标准, 准据, 规范sequence n. 次序, 顺序, 序列 irrational numbers n. [数]无理数 domain ,定义域 contradiction 矛盾reversaln. 颠倒, 反转, 反向, 逆转, 撤销Lesson 6 Functioncontinuous variable 连续变量;[连续变数]variation 变分, 变化 interval 区间independent variable 自变量 dependent variable应变量rectangular coordinate直角坐标篇三:数学英语词汇高中,国际高考38,determine 确定,决定 Specialist Mathematics 3B1,horizontal ponent水平分量 2,vertical ponent竖直分量3,magnitude/modulus 模,大小 4,position vector 位置向量5,displacement 位移 6,discriminant 判别式 7,plex number复数 8,conjugate 共轭 9,Argand diagrams 阿根图10,period周期 11 amplitude 振幅 12,parity 奇偶性13,initial ray 始边 14,terminal ray终边 15,,acute angle 锐角 16,acute triangle 锐角三角形 17,vector 向量18,vector equation 向量方程 19,cartesian equation 笛卡尔方程 20,parameter equation 参数方程 21,collision/interception 相撞/相交 22,circle centre圆心 23,calculus 微积分 24,differentiation微分 25,gradient斜率 26,chord 弦27,gradient function 斜率函数 28,chain rule 链式法则29,quotient rule 商法则 30, product 乘积法则 31,derivativen导数32,differentiatev求....微分,求导33,quadrant 象限34,x-axisx轴 35,,coordinate 坐标 36,positive 正的37,negative 负的39,,prove 证明40,real part实部 41,imaginary part 虚部 42relative to 相对于43quantity量,数量 42.Non-real 非实数 43.Exact value 精确值 44.Irrational number 无理数 45.Arithmetic 运算46.Root 根47.Variable 变量,变量的 48.Radian 弧度 49.Degree 度50.算符 operator52.数字 digit 53.数 number54自然数 natural number 55整数 integer 56.小数decimal 57小数点 decimal point 58.分数 fraction 59.分子 numerator60.零 null, zero, nought, nil 61.定理 theorem 62.计算calculation 63等式,方程式 equation 64一次方程 simple equation 65二次方程 quadratic equation 66三次方程cubic equation 67四次方程 quartic equation 68有理数rational number 69无理数 irrational number 70实数real number 71虚数 imaginary number 72复数 plex number 73横坐标 x-coordinate174纵坐标 y-coordinate 75正弦 sine 76余弦 cosine 77正切 tangent 78余切 cotangent 79相位 phase 80周期period 81振幅 amplitude 82 四舍五入round off 83函数function84定义域 domain, field of definition 85值域 range 86常量 constant 87变量 variable 88单调性 monotonicity 89奇偶性 parity 90周期性 periodicity 91圆 circle92圆心 centre(BrE), center(AmE) 93半径 radius 94直径diameter 95圆周率 pi 96弧 arc97半圆 semicircle 98扇形 sector 99单位圆 unit circle 100恒等式identity101三角恒等式trigonometric identity 102勾股恒等式the Pythagrorean identity 103相对速度 relativevelocity 104相对位移 relative displacement 105公式,准则formula 106关于 with respect to 107增量increment 108曲线curve109 垂直的perpendicular 110连续的continuous111渐近线asymptote[??simpt?ut] 112多项式函数polynomial function 113系数coefficient 114连续性continuity 115分段地piecewise 116极限limit117 数量,标量scalar118数量积the scalar product 119射影projection 120性质property 121正交的,法线normal 122法向量normal vector 123合成的resultant 124对称symmetry 125.转向点turning point126.单位向量unit vector127代替,替换substitute 128.共同的Common 129 共线的collinear 130对数 logarithm 131指数,幂 exponent132.n次方 the power of n, the nth power 133.等于equals, is equal to, is equivalent to 134.大于 is greater than 135.小于 is lesser than136.大于等于 is equal or greater than 137.小于等于 is equal or lesser than 134.有效数字 significant digit 135.无效数字 insignificant digit 136.乘方 power137.二次方,平方 square 137.三次方,立方 cube138钝角三角形 obtuse triangle 139不等边三角形 scalene triangle 140等腰三角形 isosceles triangle 141等边三角形 equilateral triangle 142四边形 quadrilateral 143平行四边形 parallelogram 145矩形 rectangle 146长 length 147宽 width148菱形 rhomb, rhombus, rhombi(pl.), 149单调性monotonicity 150posite number 合数 151prime number 质数 152.reciprocal 倒数 153.odd number 奇数 154.even number 偶数 155.linear 一次的,线性的?156.factorization 因式分解Specialist Mathematics 3A2absolute value 绝对值 equation方程 number line数轴origin 原点 plane 平面 interval区间 algebraically 代数方法 graphically 图解法 consistent 一致的inconsistent不一致的 intersection交点 inequality 不等式 bearing方位角 trigonometry 三角学 triangle三角形parallelogram 平行四边形 right triangle 直角三角形height 高 clockwise 顺时针 measurement 量度 radius 半径 vertical垂直的 horizontal 水平的 angles of elevation 仰角 angles of depression 俯角 approximately 近似地 subtending对向 collinear 共线 acute 锐角obtuse钝角 opposite side 对边 hypotenuse 斜边 vertex 顶点 sine ratio 正弦 cosine ratio 余弦 tangent正切sine rule正弦定理 odd number 奇数 even number 偶数numerator 分子 denominator 分母rationalizing the denominator分母有理化parallel 平行 latitude 经度 longitude纬度 vector向量magnitude 向量的大小,模 direction 方向 scalar 标量displacement位移 velocity 速度 acceleration 加速度force 力 resultant 合成 bine 合成 unit vector单位向量horizontal ponent 水平分量 vertical ponent 垂直分量perpendicular垂线,垂直的 magnitude 向量的大小,模modulus 向量的大小,模 column matrix列矩阵 position vector 位置向量 initial position初始位置 constant 恒定的,不变的 respectively 分别的 substitute 替代previous 之前的,以前的 coefficient系数 zero vector零向量 line segmentambiguous 不明确的 dismiss 舍弃 cosine rule 余弦定理irrational number无理数 surd 无理数,根式 natural domain 自然域 polygon多边形,多co-domain陪域 nose to tail 首尾相接 input 输入out put 输出resultant 和,结果角形 3relationship关系 posite function复合函数 Equilibrium 平衡 mon logarithm常用对数coordinate 坐标 base乘幂的底数,底边 polar coordinate 极坐标 Cube立方数,立方体 arc 弧 square root平方根Cartesian coordinate 笛卡尔坐标 cube root立方根 minor arc劣弧 Parametric参数convert 转换 major arc优弧flow chart 流程图 chord弦minor sector 小扇形 major sector 大扇形 minor segment 小弓形 major segment大弓形 area面积 circumference 圆周 shade 阴影 radius 半径 length 长度 centimetre 厘米concentric 同心的 degree 度,角度 graduation 刻度perimeter 周长 percentage 百分比 cone圆锥 index 指数logarithm 对数 base底数 growth 增长decay 衰减natural logarithm 自然对数 relative 相对的 due North 正北 reciprocal 倒数 sum 和 difference 差 product 积quotient 商 equal 相等 domain 定义域 range 值域 output 输出。
自动控制原理与设计 第5版 英文
自动控制原理与设计第5版英文Automatic Control Principles and Design 5th EditionIntroduction:Automatic control principles and design play a crucial role in various engineering fields, enabling the efficient operation of systems and processes. In this article, we delve into the key concepts and applications of automatic control, as outlined in the 5th edition of the book "Automatic Control Principles and Design."Chapter 1: Introduction to Automatic ControlAutomatic control is the use of control systems to regulate processes or machines without human intervention. It encompasses a wide range of applications, from simple domestic appliances to complex industrial systems. The chapter provides an overview of the basic principles and benefits of automatic control.Chapter 2: Modeling of Dynamic SystemsThe accurate modeling of dynamic systems is essential for effective control design. This chapter explores different techniques for modeling linear and nonlinear systems, including differential equations, transfer functions, and state-space representations. Real-world examples are used to illustrate the modeling process.Chapter 3: Time-Domain Analysis of Control SystemsTime-domain analysis allows us to examine the transient and steady-state responses of control systems. This chapter covers the analysis of first-and second-order systems, as well as higher-order systems. It also introduces the concept of system stability and the influence of system parameters on stability.Chapter 4: Frequency-Domain Analysis of Control SystemsFrequency-domain analysis provides insights into the behavior of control systems in the frequency spectrum. The chapter discusses transfer function analysis, Bode plots, Nyquist plots, and the relationship between the time- and frequency-domain representations of systems. Practical examples are included to enhance understanding.Chapter 5: Control System Design by Root Locus TechniqueThe root locus technique is a graphical method that aids in control system design. This chapter explores the construction of the root locus plot and its use in determining system stability, transient response, and controller design. Design guidelines and examples are presented to illustrate the application of this powerful tool.Chapter 6: Control System Design by Frequency Response TechniqueFrequency response techniques provide an alternative approach to control system design. This chapter discusses the design of compensators and filters using frequency response methods such as gain and phase margins and loop shaping. The advantages and limitations of this design approach are highlighted.Chapter 7: State-Space Analysis and DesignState-space analysis offers a modern and comprehensive framework for control system design. This chapter presents the concepts of state variables, state equations, observability, and controllability. The methods for state feedback control and observer design are also covered, along with their applications.Chapter 8: Digital Control SystemsThe design and implementation of control systems in the digital domain are covered in this chapter. It discusses the advantages of digital control, discretization of continuous-time systems, sampling and quantization, and various digital control algorithms. Practical considerations and implementation issues are addressed.Chapter 9: Introduction to Nonlinear Systems and ControlNonlinear systems present unique challenges in control design. This chapter introduces the basics of nonlinear systems and control techniques. It covers phase-plane analysis, describing functions, feedback linearization, and sliding mode control. Real-world examples demonstrate the application of these methods.Conclusion:The 5th edition of "Automatic Control Principles and Design" provides a comprehensive and up-to-date resource for understanding the principles and design techniques in automatic control. Through the exploration of different chapters, readers gain the necessary knowledge and skills to design effective control systems for a wide range of applications. This book serves as aninvaluable guide for students, researchers, and professionals in the field of automatic control.。
控制自动化专业词汇
天线指向控制 抗积分饱卷+• ? 非周期分解 后验估计?- 近似推理…可扩充性 自动化专业英语词汇(A —E )accelerati on tran sducer力廿速度传感器 … accepta nee testi ng验收测试一 accessibility 可及性 -訐 accumulated error 累积误差繹 AC-DC-AC freque ncy con verter交-直-交变频器 …筄 AC (alternati ng curre nt) electric drive交流电子传动 active attitude stabilizati on主动姿态稳定 澡 actuator 驱动器,执行机构… adali ne 线性适应元 “adaptation layer适应层… adaptive telemeter system 适应遥测系统 -adjoint operator伴随算子“ admissible error 容许误差- aggregati on matrix 集结矩阵AHP (an alytic hierarchy process)层次分析法 amplifyi ng eleme nt 放大环节 …an alog-digital con version模数转换- annun ciator 信号器antenna poin ti ng controlan ti-i ntegral win dupaperiodic decompositi ona posteriori estimateapproximate reas oninga priori estimate 先验估计 - articulated robot 关节型机器人assig nment problem 配置问题,分配问题attractor 吸引子 augme ntability augme ntedsystem automaticman ual stati on automaton 自动机 backlash characteristicsbase coord in ate system增广系统…?自动-手动操作器 间隙特性RX 基座坐标系…associative memory model associatron 联想机…臔 联想记忆模型asymptotic stability atta ined pose drift attitude acquisiti on 渐进稳定性实际位姿漂移 姿态捕获? • AOCS (attritude and orbit con trol system) 姿态轨道控制系统 attitude an gular velocity 姿态角速度 … attitude disturba neeattitude man euver 姿态扰动 姿态机动Bayes classifier 贝叶斯分类器bearing alignment 方位对准biological feedback systemblack box testi ng approachbli nd search 盲目搜索 block diago nalizati on Boltzma n mach ine生物反馈系统 黑箱测试法bottom-up developme ntbou ndary value an alysisbra in storm ing methodbreadth-first searchbutterfly valve 蝶阀块对角化… 玻耳兹曼机 自下而上开发 边界值分析 头脑风暴法” 广度优先搜索&誡 计算机辅助工程& 计算机辅助制造规范化状态变量聚类分析- 粗-精控制 蛛网模型- 系数矩阵- 认知科学… 单调关联系统bellows pressure gauge波纹管压力表 •诹 ben efit-cost an alysis收益成本分析 … bili near system 双线性系统? biocybernetics生物控制论…?CAE (computer aided engin eeri ng)CAM (computer aided man ufacturi ng)Camflex valve 偏心旋转阀 “ canoni cal state variable capacitive displaceme nt tran sducer 电容式位移传感器capsule pressure gauge膜盒压力表 - CARD 计算机辅助研究开发…? Cartesian robot 直角坐标型机器人 … cascade compe nsati on串联补偿••- catastrophe theory 突变论?•• cen trality 集中性?-cha ined aggregati on 链式集结 … chaos 混沌… characteristic locus 特征轨迹-■chemical propulsi on 化学推进- calrity 清晰性 - classical in formation patter n经典信息模式 - classifier 分类器扟郹 cli nical con trol system 临床控制系统 -closed loop pole 闭环极点 •closed loop tra nsfer fun cti on 闭环传递函数cluster an alysiscoarse-fi ne con trol cobweb modelcoefficie nt matrixcog nitive scie neecog nitro n 认知机cohere nt systemcomb in ati on decisi on 组合决策组合爆炸 comb in atorial explosi on comb ined pressure and vacuum gauge comma nd pose 指令位姿压力真空表 compa nion matrix 相伴矩阵 compartme ntal model 房室模型 compatibility 相容性,兼容性 compe nsat ing n etwork 补偿网络 compe nsati on 补偿,矫正 complia nee 柔顺,顺应composite con trol 组合控制computable gen eral equilibrium model con ditio nally in stability 条件不稳定性 组态… 连接机制 可计算一般均衡模型 con figurati on conn ecti onism conn ectivity con servative system con siste ncy —致性 连接性 守恒系统con stra int con diti on con sumpti on fun cti on 约束条件消费函数 con text-free grammar con ti nuous discrete eve nt hybrid system simulation contin uous duty 上下文无关语法 连续离散事件混合系统仿真 con trol accuracy con trol cab inet 连续工作制 控制精度控制柜 con trollability in dex con trollable canoni cal form [con trol] pla nt 可控指数可控规范型 控制对象,被控对象 con troll ing in strume nt 控制仪表 con trol mome nt gyro 控制力矩陀螺 con trol pa nel 控制屏,控制盘control synchro 控制[式]自整角机con trol system syn thesis 控制系统综合控制时程 合作对策 con trol time horiz on cooperative game coordinability condition coord ination strategy coord inator 协调器 可协调条件 协调策略corner freque ncy costate variable 转折频率共态变量 cost-effective ness an alysis coupli ng of orbit and attitudecritical damp ing 临界阻尼 critical stability 临界稳定性费用效益分析轨道和姿态耦合cyli ndrical robot damped oscillati on damper 阻尼器圆柱坐标型机器人阻尼振荡…damp ing ratio data acquisiti on data en crypti on data preprocess ingdata processor 阻尼比数据采集数据加密数据预处理数据处理器cross-over freque ncy 穿越频率,交越频率current source inverter 电流[源]型逆变器cut-off freque ncy 截止频率cybernetics 控制论瀛cyclic remote con trol 循环遥控&櫗'decentralitydece分散随机控制 decisi on support system decompositi on-aggregati on approach decoupli ngparameter 解耦参数 决策支持系统分解集结法deductive-inductive hybrid modeling method delayed telemetry 延时遥测 derivati on tree 导岀树 演绎与归纳混合建模法 derivative feedback微分反馈describ ing fun cti on扌描述函数desired value 希望值 desp determi nistic automat on deviati on 偏差 棛偏差报警器 deviati on alarmDFD 数据流图 diag no 诊断模型diag on ally dominant matrix diaphragm pressure gauge differe neeequation differe ntial pressure level meterdiffere ntial pressure tran smitter 确定性自动机对角主导矩阵膜片压力表差分方程模型微分动力学系统 差压液位计 差压变送器differe ntial tran sformer displaceme nt transducerdiffere ntiati on eleme nt 微分环节差动变压器式位移传感器 DC gen erator-motor set driveD co ntroller微分控制器 直流发电机-电动机组传动digital filer 数字滤波器…digital sig nal process ing 数字信号处理馶digitizati on 数字化鹅逭digitizer 数字化仪湹-dime nsion tra nsducer 尺度传感器direct coord ination 直接协调…disaggregation 解裂<■discoord in ati on 失协调-+•■discrete eve nt dyn amic system 离散事件动态系统…discrete system simulation Ianguage 离散系统仿真语言--discrim inant fun cti on 判别函数…displaceme nt vibrati on amplitude tran sducer 位移振幅传感器效益理论 需求弹性 电动执行机构 electric con ducta nee levelmeter electric drive con trol gear electric hydraulic con verter electric pn eumatic con verter electrohydraulic servo vale electromag netic flow tra nsducer 电导液位计 “ %电动传动控制设备 “电-液转换器-dissipative structure 耗散结构- distributed parameter control system 分布参数控制系统 distrubanee 扰动- disturba nee compe nsati on 扰动补偿•■? diversity 多样性… divisibility 可分性嗾諐 doma in kno wledge 领域知识 • dominant pole 主导极点 … dose-resp onse model 剂量反应模型 - dual modulati on telemeteri ng system 双重调制遥测系统 dual pri nciple 对偶原理•)• dual spin stabilizati on 双自旋稳定 - duty ratio 负载比-■ dyn amic braking 能耗制动 … dyn amic characteristics 动态特性- dyn amic deviati on 动态偏差- dyn amic error coefficie nt 动态误差系数 ”? dyn amic exact ness 动它吻合性 … dyn amic in put-output model 动态投入产岀模型 econo metric model 计量经济模型-鞨 econo mic cyber netics 经济控制论 哤■"- econo mic effective ness 经济效益 … econo mic evaluati on 经济评价■- econo mic in dex 经济指数••- • econo mic in dicator 经济指标- eddy curre nt thick ness meter 电涡流厚度计 effectiveness 有效性恐鮪 effective ness theory elasticity of de ma nd electric actuator electr onic batchi ng scale 电子配料秤 …electr onic belt con veyor scale 电子皮带秤electro nic hopper scale 电子料斗秤 -elevation 仰角-emerge ncy stop 异常停止 緼-empirical distributi on 经验分布 …en doge nous variable 内生变量equilibrium growth 均衡增长L〃equilibrium point 平衡点…equivale nee partiti等价类划分oningerg ono mics 工效学error 误差“error-correcti on parsing 纠错剖析estimate 估计量…estimati on theory 估计理论…evaluati on tech ni que 评价技术 ieve nt cha in 事件链evoluti onary system 进化系统…exoge nous variable 外生变量 -expected characteristics 希望特性■-exter nal disturba nee 外扰accelerati on tran sducer 力口速度传感器accepta nee testi ng 验收测试accessibility 可及性accumulated error 累积误差AC-DC-AC frequency converter 交-直-交变频器AC (alternating current) electric drive 交流电子传动active attitude stabilizati on 主动姿态稳定actuator驱动器,执行机构adali ne线性适应元adaptati on layer 适应层adaptive telemeter system 适应遥测系统adjoint operator 伴随算子admissible error 容许误差aggregati on matrix 集结矩阵AHP (analytic hierarchy process) 层次分析法amplifying element 放大环节analog-digital conversion 模数转换annunciator 信号器antenna pointing control 天线指向控制anti-integral windup 抗积分饱卷aperiodic decomposition 非周期分解 a posteriori estimate 后验估计approximate reasoning 近似推理 a priori estimate 先验估计articulated robot 关节型机器人assignment problem 配置问题,分配问题associative memory model 联想记忆模型associatron 联想机asymptotic stability 渐进稳定性attained pose drift 实际位姿漂移attitude acquisition 姿态捕获AOCS (attritude and orbit control system) 姿态轨道控制系统attitude angular velocity 姿态角速度attitude disturbance 姿态扰动attitude maneuver 姿态机动attractor 吸引子augment ability 可扩充性augmented system 增广系统automatic manual station 自动-手动操作器automaton 自动机backlash characteristics 间隙特性base coord in ate system 基座坐标系Bayes classifier 贝叶斯分类器bearing alignment 方位对准bellows pressure gauge 波纹管压力表benefit-cost analysis 收益成本分析bilinear system 双线性系统biocybernetics 生物控制论biological feedback system 生物反馈系统black box testing approach 黑箱测试法blind search 盲目搜索block diagonalization 块对角化Boltzman machine 玻耳兹曼机bottom-up development 自下而上开发boundary value analysis 边界值分析brainstorming method 头脑风暴法breadth-first search 广度优先搜索butterfly valve 蝶阀CAE (computer aided engineering) 计算机辅助工程CAM (computer aided manufacturing) 计算机辅助制造Camflex valve 偏心旋转阀canonical state variable 规范化状态变量capacitive displacement transducer 电容式位移传感器capsule pressure gauge膜盒压力表CARD 计算机辅助研究开发Cartesian robot 直角坐标型机器人cascade compe nsati on 串联补偿catastrophe theory 突变论centrality 集中性chained aggregation 链式集结chaos 混沌characteristic locus 特征轨迹chemical propulsion 化学推进calrity 清晰性classical information pattern 经典信息模式classifier 分类器clinical control system 临床控制系统closed loop pole 闭环极点closed loop transfer function 闭环传递函数cluster analysis 聚类分析coarse-fine control 粗-精控制cobweb model 蛛网模型coefficient matrix 系数矩阵cognitive science 认知科学cognitron 认知机coherent system 单调关联系统combination decision 组合决策combinatorial explosion 组合爆炸comb ined pressure and vacuum gauge压力真空表command pose 指令位姿companion matrix 相伴矩阵compartmental model 房室模型compatibility 相容性,兼容性compensating network 补偿网络compensation 补偿,矫正compliance 柔顺,顺应composite control 组合控制computable general equilibrium model 可计算一般均衡模型conditionally instability 条件不稳定性configuration 组态connectionism 连接机制connectivity 连接性conservative system 守恒系统consistency 一致性constraint condition 约束条件consumption function 消费函数context-free grammar 上下文无关语法continuous discrete event hybrid system simulation 连续离散事件混合系统仿真continuous duty 连续工作制control accuracy 控制精度control cabinet 控制柜controllability index 可控指数controllable canonical form 可控规范型[control] plant 控制对象,被控对象controlling instrument 控制仪表control moment gyro 控制力矩陀螺control panel 控制屏,控制盘control synchro 控制[ 式] 自整角机control system synthesis 控制系统综合control time horizon 控制时程cooperative game 合作对策coordinability condition 可协调条件coordination strategy 协调策略coordinator 协调器corner frequency 转折频率costate variable 共态变量cost-effectiveness analysis 费用效益分析coupling of orbit and attitude 轨道和姿态耦合critical damping 临界阻尼critical stability 临界稳定性cross-over frequency 穿越频率,交越频率current source inverter 电流[源]型逆变器cut-off frequency 截止频率cybernetics 控制论cyclic remote control 循环遥控cylindrical robot 圆柱坐标型机器人damped oscillation 阻尼振荡damper 阻尼器damping ratio 阻尼比data acquisition 数据采集data encryption 数据加密data preprocessing 数据预处理data processor 数据处理器DC generator-motor set drive 直流发电机-电动机组传动D controller 微分控制器decentrality 分散性decentralized stochastic control 分散随机控制decision space 决策空间decision support system 决策支持系统decomposition-aggregation approach 分解集结法decoupling parameter 解耦参数deductive-inductive hybrid modeling method 演绎与归纳混合建模法delayed telemetry 延时遥测derivation tree 导出树derivative feedback 微分反馈describing function 描述函数desired value 希望值despinner 消旋体destination 目的站detector 检出器deterministic automaton 确定性自动机deviation 偏差舱deviation alarm 偏差报警器DFD 数据流图diagnostic model 诊断模型diagonally dominant matrix 对角主导矩阵diaphragm pressure gauge 膜片压力表difference equation model 差分方程模型differential dynamical system 微分动力学系统differential game 微分对策differential pressure level meter 差压液位计differential pressure transmitter 差压变送器differential transformer displacement transducer 差动变压器式位移传感器differentiation element 微分环节digital filer 数字滤波器digital signal processing 数字信号处理digitization 数字化digitizer 数字化仪dimension transducer 尺度传感器direct coordination 直接协调disaggregation 解裂discoordination 失协调discrete event dynamic system 离散事件动态系统discrete system simulation language 离散系统仿真语言discriminant function 判别函数displacement vibration amplitude transducer 位移振幅传感器dissipative structure 耗散结构distributed parameter control system 分布参数控制系统distrubance 扰动disturbance compensation 扰动补偿diversity 多样性divisibility 可分性domain knowledge 领域知识dominant pole 主导极点dose-resp onse mode I剂量反应模型dual modulation telemetering system 双重调制遥测系统duaI principIe 对偶原理duaI spin stabiIization 双自旋稳定duty ratio 负载比dynamic braking 能耗制动dynamic characteristics 动态特性dynamic deviation 动态偏差dynamic error coefficient 动态误差系数dynamic exactness 动它吻合性dynamic input-output modeI 动态投入产出模型econometric modeI 计量经济模型economic cybernetics 经济控制论economic effectiveness 经济效益economic evaIuation 经济评价economic index 经济指数economic indicator 经济指标eddy current thickness meter 电涡流厚度计effectiveness 有效性effectiveness theory 效益理论elasticity of demand 需求弹性electric actuator 电动执行机构electric conductance levelmeter 电导液位计electric drive control gear 电动传动控制设备electric hydraulic converter 电-液转换器electric pneumatic converter 电-气转换器electrohydraulic servo vale 电液伺服阀electromagnetic flow transducer电磁流量传感器electronic batching scale 电子配料秤electronic beltconveyor scale 电子皮带秤electronic hopper scale 电子料斗秤elevation 仰角emergency stop 异常停止empirical distribution 经验分布endogenous variable 内生变量equilibrium growth 均衡增长equilibrium point 平衡点equivalence partitioning 等价类划分ergonomics 工效学error 误差error-correction parsing 纠错剖析estimate 估计量estimation theory 估计理论evaluation technique 评价技术event chain 事件链evolutionary system 进化系统exogenous variable 外生变量expected characteristics 希望特性external disturbance 外扰fact base 事实failure diagnosis 故障诊断fast mode 快变模态feasibility study 可行性研究feasible coordination 可行协调feasible region 可行域feature detection 特征检测feature extraction 特征抽取feedback compensation 反馈补偿feedforward path 前馈通路field bus 现场总线finite automaton 有限自动机FIP (factory information protocol) 工厂信息协议first order predicate logic 一阶谓词逻辑fixed sequence manipulator 固定顺序机械手fixed set point control 定值控制FMS (flexible manufacturing system) 柔性制造系统flow sensor/transducer 流量传感器flow transmitter 流量变送器fluctuation 涨落forced oscillation 强迫振荡formal language theory 形式语言理论formal neuron 形式神经元forward path 正向通路forward reasoning 正向推理fractal 分形体,分维体frequency converter 变频器frequency domain model reduction method 频域模型降阶法frequency response 频域响应full order observer 全阶观测器functional decomposition 功能分解FES (functional electrical stimulation) 功能电刺激functional simularity 功能相似fuzzy logic 模糊逻辑game tree 对策树gate valve 闸阀general equilibrium theory 一般均衡理论gen eralized least squares estimation 广义最小二乘估计generation function 生成函数geomagnetic torque 地磁力矩geometric similarity 几何相似gimbaled wheel 框架轮global asymptotic stability 全局渐进稳定性global optimum 全局最优globe valve 球形阀徢goal coordination method 目标协调法grammatical inference 文法推断graphic search 图搜索gravity gradient torque 重力梯度力矩group technology 成组技术guidance system 制导系统gyro drift rate 陀螺漂移率gyrostat 陀螺体Hall displacement transducer 霍尔式位移传感器hardware-in-the-loop simulation 半实物仿真harmonious deviation 和谐偏差harmonious strategy 和谐策略heuristic inference 启发式推理hidden oscillation 隐蔽振荡hierarchical chart 层次结构图hierarchical planning 递阶规划hierarchical control 递阶控制homeostasis 内稳态homomorphic model 同态系统horizontal decomposition 横向分解hormonal control 内分泌控制hydraulic step motor 液压步进马达hypercycle theory 超循环理论I controller 积分控制器identifiability 可辨识性IDSS (intelligent decision support system) 智能决策支持系统image recognition 图像识别impulse 冲量impulse function 冲击函数,脉冲函数inching 点动incompatibility principle 不相容原理incremental motion control 增量运动控制index of merit 品质因数inductive force transducer 电感式位移传感器inductive modeling method 归纳建模法industrial automation 工业自动化inertial attitude sensor 惯性姿态敏感器inertial coordinate system 惯性坐标系inertial wheel 惯性轮inference engine 推理机infinite dimensional system 无穷维系统information acquisition 信息采集infrared gas analyzer 红外线气体分析器inherent nonlinearity 固有非线性inherent regulation 固有调节initial deviation 初始偏差initiator 发起站injection attitude 入轨姿势input-output model 投入产出模型instability 不稳定性instruction level language 指令级语言integral of absolute value of error criterion 绝对误差积分准则integral of squared error criterion 平方误差积分准则integral performance criterion 积分性能准则integration instrument 积算仪器integrity 整体性intelligent terminal 智能终端interacted system 互联系统,关联系统interactive prediction approach 互联预估法,关联预估法interconnection 互联intermittent duty 断续工作制internal disturbance 内扰ISM (interpretive structure modeling) 解释结构建模法invariant embedding principle 不变嵌入原理inventory theory 库伦论inverse Nyquist diagram 逆奈奎斯特图inverter 逆变器investment decision 投资决策isomorphic model 同构模型iterative coordination 迭代协调jet propulsion 喷气推进job-lot control 分批控制joint 关节Kalman-Bucy filer 卡尔曼-布西滤波器knowledge accomodation 知识顺应knowledge acquisition 知识获取knowledge assimilation 知识同化KBMS (knowledge base management system) 知识库管理系统瓢knowledge representation 知识表达ladder diagram 梯形图lag-lead compensation 滞后超前补偿Lagrange duality 拉格朗日对偶性Laplace transform 拉普拉斯变换large scale system 大系统lateral inhibition network 侧抑制网络least cost input 最小成本投入least squares criterion 最小二乘准则level switch 物位开关libration damping 天平动阻尼limit cycle 极限环linearization technique 线性化方法linear motion electric drive 直线运动电气传动linear motion valve 直行程阀linear programming 线性规划LQR (linear quadratic regulator problem) 线性二次调节器问题load cell 称重传感器local asymptotic stability 局部渐近稳定性local optimum 局部最优log magnitude-phase diagram 对数幅相图long term memory 长期记忆lumped parameter model 集总参数模型Lyapunov theorem of asymptotic stability 李雅普诺夫渐近稳定性定理macro-economic system 宏观经济系统magnetic dumping 磁卸载magnetoelastic weighing cell 磁致弹性称重传感器magnitude-frequency characteristic 幅频特性magnitude margin 幅值裕度magnitude scale factor 幅值比例尺manipulator 机械手man-machine coordination 人机协调manual station 手动操作器MAP (manufacturing automation protocol) 制造自动化协议marginal effectiveness 边际效益Mason''s gain formula 梅森增益公式master station 主站matching criterion 匹配准则maximum likelihood estimation 最大似然估计maximum overshoot 最大超调量maximum principle 极大值原理mean-square error criterion 均方误差准则mechanism model 机理模型meta-knowledge 元知识metallurgical automation 冶金自动化minimal realization 最小实现minimum phase system 最小相位系统minimum variance estimation 最小方差估计minor loop 副回路missile-target relative movement simulator 弹体- 目标相对运动仿真器modal aggregation 模态集结modal transformation 模态变换MB (model base) 模型库model confidence 模型置信度model fidelity 模型逼真度model reference adaptive control system 模型参考适应控制系统model verification 模型验证modularization 模块化MEC (most economic control) 最经济控制motion space 可动空间MTBF (mean time between failures) 平均故障间隔时间MTTF (mean time to failures) 平均无故障时间multi-attributive utility function 多属性效用函数multicriteria 多重判据multilevel hierarchical structure 多级递阶结构multiloop control 多回路控制multi-objective decision 多目标决策multistate logic 多态逻辑multistratum hierarchical control 多段递阶控制multivariable control system 多变量控制系统myoelectric control 肌电控制Nash optimality 纳什最优性natural language generation 自然语言生成nearest-neighbor 最近邻necessity measure 必然性侧度negative feedback 负反馈neural assembly 神经集合neural network computer 神经网络计算机Nichols chart 尼科尔斯图noetic science 思维科学noncoherent system 非单调关联系统noncooperative game 非合作博弈nonequilibrium state 非平衡态nonlinear element 非线性环节nonmonotonic logic 非单调逻辑nonparametric training 非参数训练nonreversible electric drive 不可逆电气传动nonsingular perturbation 非奇异摄动non-stationary random process 非平稳随机过程nuclear radiation levelmeter 核辐射物位计nutation sensor 章动敏感器Nyquist stability criterion 奈奎斯特稳定判据objective function 目标函数observability index 可观测指数observable canonical form 可观测规范型on-line assistance 在线帮助on-off control 通断控制open loop pole 开环极点operational research model 运筹学模型optic fiber tachometer 光纤式转速表optimal trajectory 最优轨迹optimization technique 最优化技术orbital rendezvous 轨道交会orbit gyrocompass 轨道陀螺罗盘orbit perturbation 轨道摄动order parameter 序参数orientation control 定向控制originator 始发站oscillating period 振荡周期output prediction method 输出预估法oval wheel flowmeter 椭圆齿轮流量计overall design 总体设计overdamping 过阻尼overlapping decomposition 交叠分解Pade approximation 帕德近似Pareto optimality 帕雷托最优性passive attitude stabilization 被动姿态稳定path repeatability 路径可重复性pattern primitive 模式基元PR (pattern recognition) 模式识别P control 比例控制器peak time 峰值时间penalty function method 罚函数法perceptron 感知器periodic duty 周期工作制perturbation theory 摄动理论pessimistic value 悲观值phase locus 相轨迹phase trajectory 相轨迹phase lead 相位超前photoelectric tachometric transducer 光电式转速传感器phrase-structure grammar 短句结构文法physical symbol system 物理符号系统piezoelectric force transducer 压电式力传感器playback robot 示教再现式机器人PLC (programmable logic controller) 可编程序逻辑控制器plug braking 反接制动plug valve 旋塞阀pneumatic actuator 气动执行机构point-to-point control 点位控制polar robot 极坐标型机器人pole assignment 极点配置pole-zero cancellation 零极点相消polynomial input 多项式输入portfolio theory 投资搭配理论pose overshoot 位姿过调量position measuring instrument 位置测量仪posentiometric displacement transducer 电位器式位移传感器positive feedback 正反馈power system automation 电力系统自动化predicate logic 谓词逻辑pressure gauge with electric contact 电接点压力表pressure transmitter 压力变送器price coordination 价格协调primal coordination 主协调primary frequency zone 主频区PCA (principal component analysis) 主成分分析法principle of turnpike大道原理priority 优先级process-oriented simulation 面向过程的仿真productionbudget 生产预算production rule 产生式规则profit forecast 利润预测PERT (program evaluation and review technique) 计划评审技术program set station 程序设定操作器proportional control 比例控制proportional plus derivative controller 比例微分控制器protocol engineering 协议工程prototype 原型pseudo random seque nee伪随机序歹U pseudo-rate-increment control 伪速率增量控制pulse duration 脉冲持续时间pulse frequeney modulation eontrol system 脉冲调频控制系统pulsewidth modulation eontrol system 脉冲调宽控制系统PWM inverter 脉宽调制逆变器pushdown automaton 下推自动机QC (quality control) 质量管理quadratic performance index 二次型性能指标qualitative physical model 定性物理模型quantized noise 量化噪声quasilinear characteristics 准线性特性queuing theory 排队论radio frequency sensor 射频敏感器ramp function 斜坡函数random disturbance 随机扰动random process 随机过程rate integrating gyro 速率积分陀螺ratio station 比值操作器reachability 可达性reaction wheel control 反作用轮控制realizability 可实现性,能实现性real time telemetry 实时遥测receptive field 感受野rectangular robot 直角坐标型机器人rectifier 整流器recursive estimation 递推估计reduced order observer 降阶观测器redundant information 冗余信息reentry control 再入控制regenerative braking 回馈制动,再生制动regional planning model 区域规划模型regulating device 调节装载regulation 调节relational algebra 关系代数relay characteristic 继电器特性remote manipulator 遥控操作器remote regulating 遥调remote set point adjuster 远程设定点调整器rendezvous and docking 交会和对接reproducibility 再现性resista nee thermometer sen sor热电阻resolution principle 归结原理resouree alloeation 资源分配response eurve 响应曲线returndifferenee matrix 回差矩阵return ratio matrix 回比矩阵reverberation 回响reversible eleetrie drive 可逆电气传动revolute robot 关节型机器人revolution speed transducer 转速传感器rewriting rule 重写规则rigid spacecraft dynamics 刚性航天动力学risk decision 风险分析robotics 机器人学robot programming language 机器人编程语言robust control 鲁棒控制robustness 鲁棒性roll gap measuring instrument 辊缝测量仪root locus 根轨迹roots flowmeter 腰轮流量计rotameter 浮子流量计,转子流量计rotary eccentric plug valve 偏心旋转阀rotary motion valve 角行程阀rotating transformer 旋转变压器Routh approximation method 劳思近似判据routing problem 路径问题sampled-data control system 采样控制系统sampling control system 采样控制系统saturation characteristics 饱和特性scalar Lyapunov function 标量李雅普诺夫函数SCARA (selective compliance assembly robot arm) 平面关节型机器人scenario analysis method 情景分析法scene analysis 物景分析s-domain s 域self-operated controller 自力式控制器self-organizingsystem 自组织系统self-reproducing system 自繁殖系统self-tuningcontrol 自校正控制semantic network 语义网络semi-physicalsimulation 半实物仿真sensing element 敏感元件sensitivity analysis 灵敏度分析sensory control 感觉控制sequential decomposition 顺序分解seque ntial least squares estimation序贯最小二乘估计servo control 伺服控制,随动控制servomotor 伺服马达settling time 过渡时间sextant 六分仪short term planning 短期计划short time horizon coordination 短时程协调signal detection and estimation 信号检测和估计signal reconstruction 信号重构similarity 相似性simulated interrupt 仿真中断simulation block diagram 仿真框图simulation experiment 仿真实验simulation velocity 仿真速度simulator 仿真器single axle table 单轴转台single degree of freedom gyro 单自由度陀螺single level process 单级过程single value nonlinearity 单值非线性singular attractor 奇异吸引子singular perturbation 奇异摄动sink 汇点slaved system 受役系统slower-than-real-time simulation 欠实时仿真slow subsystem 慢变子系统socio-cybernetics 社会控制论socioeconomic system 社会经济系统software psychology 软件心理学solar array pointing control 太阳帆板指向控制solenoid valve 电磁阀source 源点specific impulse 比冲speed control system 调速系统spin axis 自旋轴spinner 自旋体stability criterion 稳定性判据stability limit 稳定极限stabilization 镇定,稳定Stackelberg decision theory 施塔克尔贝格决策理论state equation model 状态方程模型state space description 状态空间描述static characteristics curve 静态特性曲线station accuracy 定点精度stationary random process 平稳随机过程statistical analysis 统计分析statistic pattern recognition 统计模式识别steady state deviation 稳态偏差steady state error coefficient 稳态误差系数step-by-step control 步进控制step function 阶跃函数stepwise refinement 逐步精化stochastic finite automaton 随机有限自动机strain gauge load cell 应变式称重传感器strategic function 策略函数strongly coupled system 强耦合系统subjective probability 主观频率suboptimality 次优性supervised training 监督学习supervisory computer control system 计算机监控系统sustained oscillation 自持振荡swirlmeter 旋进流量计switching point 切换点symbolic processing 符号处理synaptic plasticity 突触可塑性synergetics 协同学syntactic analysis 句法分析system assessme n係统评价systematology 系统学system homomorphism 係统同态system isomorphism 係统同构system engineering 係统工程tachometer 转速表target flow transmitter 靶式流量变送器task cycle 作业周期teaching programming 示教编程telemechanics 远动学telemetering system of frequency division type 频分遥测系统telemetry 遥测teleological system 目的系统teleology 目的论temperature transducer 温度传感器template base 模版库tensiometer 张力计texture 纹理theorem proving 定理证明therapy model 治疗模型thermocouple 热电偶thermometer 温度计thickness meter 厚度计three-axis attitude stabilization 三轴姿态稳定three state controller 三位控制器thrust vector control system 推力矢量控制系统thruster 推力器time constant 时间常数time-invariant system 定常系统,非时变系统time schedule controller 时序控制器time-sharing control 分时控制time-varying parameter 时变参数top-down testing 自上而下测试topological structure 拓扑结构TQC (total quality control) 全面质量管理tracking error 跟踪误差trade-off analysis 权衡分析transfer function matrix 传递函数矩阵transformation grammar 转换文法transient deviation 瞬态偏差transient process 过渡过程transition diagram 转移图tran smissible pressure gauge 电远传压力表transmitter 变送器trend analysis 趋势分析triple modulation telemetering system 三重调制遥测系统turbine flowmeter 涡轮流量计Turing machine 图灵机two-time scale system 双时标系统ultrasonic levelmeter 超声物位计unadjustable speed electric drive 非调速电气传动unbiased estimation 无偏估计underdamping 欠阻尼uniformly asymptotic stability 一致渐近稳定性uninterrupted duty 不间断工作制,长期工作制unit circle 单位圆unit testing 单元测试unsupervised learing 非监督学习upper level problem 上级问题urban planning 城市规划utility function 效用函数value engineering 价值工程variable gain 可变增益,可变放大系数variable structure control system 变结构控制vector Lyapunov function 向量李雅普诺夫函数velocity error coefficient 速度误差系数velocity transducer 速度传感器vertical decomposition 纵向分解vibrating wire force transducer 振弦式力传感器vibrometer 振动计viscous damping 粘性阻尼voltage source inverter 电压源型逆变器vortex precession flowmeter 旋进流量计vortex shedding flowmeter 涡街流量计WB (way base) 方法库weighing cell 称重传感器weighting factor 权因子weighting method 加权法Whittaker-Shannon sampling theorem 惠特克-香农采样定理Wiener filtering 维纳滤波work station for computer aided design 计算机辅助设计工作站w-plane w 平面zero-based budget 零基预算zero-input response 零输入响应zero-state resp onse 零状态响应zero sum game model 零和对策模型z-transform z 变换。
自动控制原理英文词汇表

1automation 自动化1closed-loop 闭环1open-loop 开环1feedback反馈1closed-loop feedback control system 闭环反馈控制系统1open-loop control system 开环控制系统1negative feedback 负反馈1positive feedback 正反馈1control system控制系统1complexity of design 设计复杂性1design 设计1design gap设计差距1engineering design 工程设计1feedback signal 反馈信号1flyball governor飞球调节器1multivariable control system 多变量控制系统1optimization 优化1plant 对象1process过程1productivity 生产率1risk 风险1robot机器人1specifications 指标说明1synthesis 综合1system 系统1trade-off折中2actuator 执行机构/执行器2assumptions 假设条件2block diagrams框图2characteristic equation 特征方程2transfer function 传递函数2closed-loop transfer function 闭环传递函数2open-loop transfer function 开环传递函数2damping阻尼2damping ratio 阻尼系数/阻尼比2critical damping 临界阻尼2damping oscillation 阻尼振荡2DC motor直流电机2differential equation 微分方程2error误差2error signal 误差信号2final value终值2final value theorem 终值定理2homogeneity齐次性2Laplace transform 拉普拉斯变换2linear approximation 线性近似2linear system线性系统2linearized线性化的chterm translation2linearization线性化2Mason loop rule梅森回路规则2Mason formula梅森公式2natural frequency固有频率/自然频率2necessary condition必要条件2overdamped过阻尼的2poles极点2zeros零点2principle of superposition叠加原理2reference input参考输入2residues留数2signal-flow graph信号流图2simulation 仿真2steady state稳态2s-plane s平面2Taylor series泰勒级数2time constant时间常数2underdamped欠阻尼的2unity feedback单位反馈3canonical form标准型3diagonal canonical form对角标准型/对角线标准型3discrete-time approximation离散时间近似3Euler's method欧拉方法3fundamental matrix基本矩阵3input feedforward canonical form输入前馈标准型3Jordan canonical form约当标准型3matrix exponential function矩阵指数函数3output equation输出方程3phase variable canonical form相变量标准型3phase variable相变量3physical variables物理变量3state differential equation状态微分方程3state space状态空间3state variables状态变量3state vector状态向量/状态矢量3state of a system系统状态3state-space representation状态空间表示/状态空间表达式3state variable feedback状态变量反馈3time domain时域3time-varying system时变系统3time-invariant system时不变系统/非时变系统3transition matrix转移矩阵4closed-loop system闭环系统4complexity复杂度4components组件4direct system直接系统4disturbance signal扰动信号4error signal误差信号4instability不稳定性4loss of gain增益损失4open-loop system开环系统4steady-state error稳态误差4system sensitivity系统灵敏度4transient response暂态响应/瞬态响应4steady-state response稳态响应5acceleration error constant,Ka加速度误差常数,Ka5position error constant,Kp位置误差常数,Kp5velocity error constant,Kv速度误差常数,Kv5design specifications设计要求5domainant roots主导极点5optimum control system最优控制系统5peak time峰值时间5percent overshoot百分比超调/超调量5maximum percent overshoot最大超调量5performance index性能指标5rise time 上升时间5settling time 调整时间5test input signal测试输入信号5tyoe number型数5unit impulse单位脉冲6absolute stability绝对稳定性6auxiliary polynomial辅助多项式6marginally stable临界稳定6relative stability相对稳定性6Rooth-Hurwitz criterion Rooth-Hurwitz判据/劳斯-赫尔维茨判据6stability稳定性6stable system稳定系统7angle of departure出射角7angle of the asymptotes渐近角7asymptote渐近线7asymptote centroid渐近中心7breakaway point分支点7dominant roots主导极点7locus轨迹7logarithmic sensitivity对数灵敏度7number of separate loci根轨迹的段数7parameter design参数设计7PID controller PID控制器7proportional plus derivative (PD) controller比例加微分(PD)控制器7proportional plus integral (PI) controller比例加积分(PI)控制器7root contours根等值线7root locus根轨迹7root locus method根轨迹法7root locus segments on the real axis实轴上的根轨迹段7root sensitivity根灵敏度8all-pass network全通网络8bandwidth带宽8Bode plot Bode图/波德图8break frequency截止频率8corner frequency转折频率8decade十倍频程8Decibel/dB分贝8Fourier transform Fourier变换/傅里叶变换8Fourier transform pair Fourier变换对/傅里叶变换对8frequency response频率响应8Laplace transform pair拉普拉斯变换对8Logarithmic magnitude对数幅值8Logarithmic plot对数坐标图8maximum value of the frequency response频率响应的最大值8minimum phase transfer dunction最小相位传递函数8nonminimum phase system非最小相位系统8polar plot极坐标图8resonant frequency谐振频率8transfer function in the frequency domain频域传递函数9Cauchy's theorem Cauchy定理9closed-loop frequency response闭环频率响应9conformal mapping保角映射9contour map围道映射9gain margin增益裕度/增益裕量9logarithmic (decibel) measure对数(分贝)度量9Nichols chart Nichols图9Nyquist stability criterion Nyquist稳定判据/奈奎斯特稳定判据9phase margin相角裕度/相位裕度9principle of the argument幅角原理9time delay时滞10cascade compensation network串联校正网络10compensation校正10compensator校正装置10deadbeat response最小拍响应10design of a control system控制系统设计10integration network积分网络10lag network滞后网络10lead network超前网络10lead-lag network超前滞后网络10phase lag compensation相角滞后校正10phase lead compensation相角超前校正10phase-lag network相角滞后网络10phase-lead network相角超前网络10prefilter前置滤波11command following给定跟踪11controllability matrix能控性矩阵11controllable system能控系统11detectable能检测11estimation error估计误差11full-state feedback control law全状态反馈控制律11internal mode design内模设计11Kalman state-space decomposition Kalman状态空间分解/卡尔曼状态空间分解11linear quadratic regulator线性二次型调节器11observable system能观系统11observability matrix能观性矩阵11observer观测器11optimal control system最优控制系统11pole assignment极点配置11separation principle分离原理11stabilizable能镇定11stabilizing controller镇定控制器11state variable feedback状态变量反馈12additive perturbation加性摄动12complementary sensitivity function补灵敏度函数12internal model principle内模原理12mulplicative perturbation乘性摄动12process controller过程控制器12robust control system鲁棒控制系统12robust stability criterion鲁棒稳定判据12root sensitivity根灵敏度12system sensitivity系统灵敏度12three-mode controller三模态控制器12three-term controller三项控制器13amplitude quantization error幅值量化误差13backward difference rule后向差分规则13digital computer compensator数字计算机校正装置13digital controll system数字控制系统13forward rectangular integration前向矩形积分13microcomputer微型计算机13minicomputer小型计算机13digital PID controller数字PID控制器13precision精度13sampled data采样数据13sampled-data system采样数据系统13sampling period采样周期13stability of sampled-data system采样数据系统的稳定性13z-plane z平面13z-transform z变换13zero-order hold零阶保持13zero-order holder零阶保持器。
自动控制原理(中英文对照 李道根)习题4.题解

2
,
(a) Find the angles of departure of the root locus from the complex poles. (b) Find the entry point for the root locus as it enters the real axis. Solution: G ( s)
Solving the breakaway-point equation
2s 4 s 4s 8
2
1 s3
s 2 6s 4 0
we have s b 5.24 . Or, z1 p1 5 , s b 3 5 5.24 . The angles of departure of the root locus from the complex poles are
k ( s 3) s 4s 8
2
k ( s 3) (s 2) 2 2 2
. By inspection, we have p1, 2 2 j 2 and
z1 5 . The root locus in the complex plane is a part of a circle with the center at the zero and a radius of the length from the zero to one pole. There is a breakaway point on the real-axis segment, ( , 3) . The root locus is plotted as shown.
z1 1 . k (s 1) s 4s 5
液压外文翻译英文部分

Facilities Available in Run Mode1 IntroductionIn run mode you can:●Specify the characteristics of simulation runs.●Initiate these simulation runs.●Plot graphs of the results.●Specify linear analysis to be performed at various times.●Post-process the linear analysis results.●Post-process activity index results.●Start the design exploration control panel and perform designexport studies.●Start the export parameters control panel and create exportfiles.There are a large number of special icons in run mode as shown in Figure 1Figure 1: Icons available in Run mode2 Time domain and linear analysis modesWhen you click on component or line run, AMESim behaves differently if Time domain mode or Linear analysis mode is currently selected. If Linear analysis mode is selected a group of special icons are displayed. In Timedomain mode you can plot graphs. This activity involves AMESim reading the reading the results files from either a standard run or a batch run.In Linear analysis mode you can:●Set the characteristics for linear analyses to be done during nextrun.●Look at eigenvalues.●Do Bode,Nyquist and Nichols plots.●Examine modal shapes.●Do a root locus plot.This involves AMESim reading .jac(Jacobian) files.In both modes run parameters can be set and runs initiated.3 Running a simulationTo run a simulation:1.If necessary, change the Save status and Locked status of variables.2.If necessary, change the linear analysis status of variables.3. Set the run parameters to define the characteristics of the run.To do this click on the Run parameters button to puoduce the Run Parameters dialog box.4. Initiate the run by clicking on the Start run button.When therun starts,a Simulation run dialog box appears.3.1 Save status and Save next status of variablesIf the Save next status of a variable is true,during the next run its value will be added to the .results file. The Save next status of variables does not in any way influence linear analysis results.The Save next status of variables can be changed:●Globally for the currently seleted sub-system.●For all variables in asubmodel.●For individual variables.In the .results file a variable is saved or not according to its saved statue when the run was initiated. This may be different from its currentstatus.If you want to change the status of a variable tick the corresponding box within The Save next column before the run. The saved variable are in the .results file and you can plot them.The column Saved shows if a variable has been saved or not and consequently if it is plottable.Global change of save next status1.S elect the part of the system of interest or select the whole systemusing●Ctrl+A or●Edit →Select all2.Create the right button menu or use the Tools pulldown menu. In either case select.●Save all variables or●Save no variables.If all you want to do is a series of linear analyses with a big system, it may be appropriate to do a run with the Save next status of all variables false.Submodel change of Save next status1. Make sure you are in Time domain mode.2. Click on a component or line run to produce the Variable list dialogbox.3. Click on Save all to ensure that all variables in that submodel will be saved during next run.4. Click on Save none to ensure that no variables in that submodel will be saved during the next run.Individual variable change of Save next status1.Make sure you are in Time domain mode2.Click on a component or line run to produce the Variable list dialog box.3. Alter the check box status in the Save next column.A tick means the variable will be saved during the next run.3.2 Locked status of state variablesThe following variables:●Explicit state●Implicit stateBut not constraint variables have a Locked status which is true or false. This locked status only influences the results if there is any sort of stabilizing run. If one of these variables is locked, its value is not allowed to vary during a stabilizing run. The locked states facility is useful for advanced users who wish to obtain a partial equilibrium for theirsystem.The Locked status of state variables can be changed:●Globally for the currently selected sub-system.●For all state variables in a submodel.●For individual state variables.Global change of Locked status1.Select the part of the system of interest or select the whole system using●Ctrl+A or●Edit u Select all.2.Create the right-button menu or use the Tools menu.In either case select:●Unlock all states or●Lock all states.Submodel change of Locked status1.Make sure you are in Time domain mode.2.Right-click on a component or line run to produce the pulldown menu.3.Select Lock states to produce the Locked states status dialog box.4.Click on Unlock All or Lock All as appropriate.Change of Locked status for individual state variables1.Make sure you are in Time domain mode.2.Right-click on a component or line run to produce the pulldown menu.3.Select Lock states to produce the Locked states status dialog box.4.Alter the state of the check buttons in the Locked column to change the Locked status of individual state variables.3.3 Setting run parametersIf you click on the Run parameters button, you get the Run Parameters dialog box. This is used to change characteristics of next run. You can change numerical values and enable or disable various check and radio buttons. At the top of the dialog box 3 tabs give you access to groups of parameters and options you can change, When you have made the changes you want, click on the OK button to save them. If you click on Cancel, yourchanges will be ignored.We now look at the parameters and options available under the three tabsWith the General tab selected you have access to values and options which apply to both the standard integrator and fixed step integrators as in the example shown in Figure.The Value column is editable.To change a value:1.Double-click on it.2.Type the new value in the edited box.The meaning of the first two items in the list is obvious.A short note on the third item and on the various option buttons is appropriate. Communication intervalDuring the run data is added to the results file.The communication interval specifies how often this is done.The smaller the communication interval is,the larger the .results file is .Most AMESim users like about 1000 points in their result files.Hence the formula:The communication interval and the step size used by the AMESim integrator are completely independent. If you enable the Discontinuityprintout button,extra values are added to .results file at the discontinuity points.ToleranceThe AMESim standard integrator performs integration in a series of discrete steps. At each step an iterative process is employed and this process must converge. Thus after each integration step a convergence testis employed. When the iterations do converge, an error test is employed to determine if the results are accurate enough. If either of these tests fails, the step must be repeated with a smaller step size.These two tests use the tolerance value defined in Simulation values list. A number of important statements must be made:●There is no precise connection between the tolerance and actual maximumerror in the results. The most general thing we can say is that the smaller the tolerance is, the more accurate are the results.●Normally you should not use values less than 1.0e-10 but occasionaltolerances down to 1.0e-14 work.●Normally you should not use values greater than 1.0e-3.If you are going to trust the results, it is very good practice to performa series of runs with a sequence of tolerances. Look for consistency between the results. The default value for the tolerance is 1.0e-5.Normally if you perform further runs with 1.0e-6, 1.0e-7,1.0e-8,1.0e-9,you will not notice any significant difference. If you do, believe the results produced with the smaller tolerance.An extremely useful submodel is SIMP1 which is associated with theicon shown. The icon contains a ‘!’and this means use withcaution.This caution is necessary because parameters set in SIMP1 take precedence over the values in the Run Parameters dialog box. The parameterof interest is highlighted below.If your sketch contains this icon, you drag and drop this parameter into a Batch Control Parameters Setup dialog box, you can organize a batch run with the tolerance varying. The parameters below give a batch run with tolerances 1.0e-5,1.0e-6,1.0e-7,1.0e-8 and 1.0e-9.Run typehere are two radio buttons:●Single run.●Batch.Must be selected one.If Batch is selected, the Batch options button is sensitive. Click on this if you want to specify a subset of batch runs to occur.Define which runs to suppress in the Batch Run Selection dialog box.MiscellaneousThese check buttons can be enabled or disabled in any combination.StatisticsWith the Statistics button enabled,when the run is complete,a briefsummary of what happened in the run is displayed in the Simulation run dialogbox:Note that the accuracy of the CPU time depends on the platform you areusing.On at least one platform CPU times are extremely inaccurate.Monitor timeMonitor time is enabled by default and a progress bar appears at the bottomof the Simulation run dialog box.On some platforms creating this bar slowsthe simulation down significantly on simple runs.●Experiment with your local AMESim running with the button enabled and disabled.If there is a significant difference you may prefer to keep itdisabled.●If you want to do bench mark tests,it is a good idea to disable it. Use old final valuesIf the Use old final values button is enabled, AMESim tries to extractthe final values from the current .results file and use them as startingvalues for next run.Maximum time stepThis value specifies a limit on the step size that can be used by theAMESim integrator. The default value is 1.0e30 which is very large and meansthat this step size is unlimited. This value is good on the vast majority of runs but occasionally AMESim takes too big steps producing strange results. In such circumstances it is useful to reduce the maximum step size. If you enable the Cautious option as the Solver type, the integrator step will never exceed the Communication interval.3.4 Integration methods usedThis section is appropriate reading for those who are interested in the numerical algorithms employed by AMESim. Some simulation software gives you a menu of integration algorithms from which you are invited to make a choice. Even for a specialist numerical analyst, given a newly constructed system, it is difficult to make an informed selection. The problem is made much more difficult because the characteristics of the equations governing the system may change in the course of the simulation. This often happens at discontinuity points. Just before the discontinuity algorithm A might be very suitable. After the discontinuity it is very unsuitable and algorithm B is much better.It is unreasonable to expect the user to recognize this fact, stop the simulation at this point and restart with a different integration algorithm.In practice what often happens is that an integration algorithm is used which is unsuitable for at least part of the simulation. This may lead to very long run times.The AMESim integrators provided can be divided into two types:●variable step, variable order methods with control of errors●fixed step,fixed order methods with no error control.The standard AMESim integrator uses a collection of 17 variable step variable order methods. These are very robust and flexible.They are capable of adapting to a wide variety of problems.Most of the time you will be using these methods.Fixed step integratorsFixed step fixed order methods are much less robust and flexible that the variable step variable order methods. However, they are extensively usedin real time simulation. Note that facilities are available to export an AMESim model to a real time environment. However, there are limitation on the models that will run in this environment: The equations governing the model normally must be explicit. In other words there must be no constraints or implicit state variables. There will be some limit on the size of the model. This limit will depends on the capability of the real time platform.The dynamics of the model must be sufficiently slow. Study of this often in-volves determining the eigenvalues of the system.Experienced users often developed very complex high fidelity models in AMESim. To run these models in a real time environment normally involves work to reduce the complexity. This process is often called model reduction. After a while the modeler begins to think that the model is sufficiently reduced to run in the target real time environment. At this stage the reduced model can be run in AMESim with the fixed step fixed order integration methods provided. Remember that the reference results are the high fidelity results. If this is successful, the export to the real time environment can go ahead.The standard integratorOne very common problem that arises in simulation of engineering systems is that of numerical stiffness. A stiff problem is one in which there is a time constant which is extremely small compared to the simulation range i.e. Final time-Start time. The famous Gear’s method was specifically developed to solve such problems. Most other integration algorithms are impossibly slow when applied to such problems.Another common problem is discontinuities. These are points at which there is a switch from a set of one or more governing equation(s)to another completely different set. One extreme example occurs in the modeling of an mass where there are physical limitations on movement. These are often referred to as endstops. AMESimRun uses two techniques to model endstops: 1.they are modeled as elastic with a spring force and a damping force or2.they are modeled as inelastic so that the mass collides with theendstop coming instantaneously to rest.The second alternative is often described as an ideal endstop.With an ideal endstop the mass reaches an extreme position and it is modeled as coming instantaneously to rest–a true discontinuity. The mass is then fixed in the extreme position until there is a force of the correct sign and of sufficient magnitude to overcome static friction moves it away from the extreme position A more detailed description of problems arising from discontinuities is given in the AMESet manual to which the interested reader is referred.Gear’s method is very intolerant of discontinuities unless special code is inserted to deal with them. Unfortunately the equations defining the model of many engineering systems are stiff and contain discontinuities. If discontinuity-handling code is not provided or is provided but not used,Gear’s method may fail on these problems.Simple Runge-Kutta algorithms are relatively tolerant of discontinuities and can perform well on some problems but they are very unsuitable for stiff problems. However, many simulations are performed on stiff problems rich in discontinuities using these methods. Often a solution can be obtained, but the run times can be hours or days. The answer here is to use a Gear integrator with good discontinuity handling. The saving in computing times can be spectacular.The standard AMESim integrator does not give the user a choice of integration algorithm.Instead the characteristics of the equations governing the model are used to select automatically the most appropriate algorithm. If the model contains any implicit variables the differential algebraic equation integration algorithm DASSL is used otherwise the ordinary differential equation integration algorithm LSODA is used.DASSL is probably the best differential algebraic equation integration algorithm currently available and is certainly the only one that is widelyused. It uses a collection of integrators of the same type as those employed in Gear’s method.Differential algebraic equations often behave like ordinary differential equationsLSODA uses a collection of non-stiff integration(Adams-Moulton multistep) methods and the same collection of stiff integration(backward differentiation formulae multistep)methods as are employed in Gear’s method. LSODA monitors the characteristics of the governing equations and switches between the non-stiff and stiff integrators as is necessary. By this means LSODA is generally a very efficient solver irrespective of the characteristics of the model ordinary differential equations.DASSL and LSODA as implemented in AMESim are substantially different from the original algorithms.。
The_Root_Locus
南京航空航天大学金城学院自动化系
3
2. 在汉语中句子的主要部分通常应放在从属部分之后。 E.g: There is air all round us though we can’t see it with the naked eye. 译: 虽然我们用肉眼看不见空气,但是它却存在于我们周 围。
南京航空航天大学金城学院自动化系
2. 当代词在英语句中用来避免重复时
E.g1: Some jets travel faster than sound. Then we shall not hear them until they have gone. 译:一些喷气式飞机飞得比音速还快。这时,要等飞机飞过之 后,我们才能听到它们的声音。
n.
a. 复数共轭
接近,近似
较好的 相角与幅值准则
angle and magnitude criteria complex conjugates
南京航空航天大学金城学院自动化系
15
难句解释:
[1] The root locus, therefore, provides information not
E.g3: You can tell the specific gravity of a certain object by knowing its weight in air and its weight in water. 译: 只要知道某一物体在空气中的重量和在水中的重量, 你就能知道它的比重。
text introduce?
4. What are root loci used for?
5. What conditions are Phase-lead and Phase-lag compensation used?
根轨迹法基本概念

KG0 (s)
则闭环特征方程为:
1 K num 0 den
特征方程旳根随参数K旳变化而变化,即为闭环根轨迹.
项目1:已知系统旳开环传递函数模型为:
K Gk (s) s(s 1)(s 2) KG0(G)
利用下面旳MATLAB命令可轻易地绘制出系统旳根轨迹 >>G=tf(1,[conv([1,1],[1,2]),0]);
引言
A.闭环系统旳稳定性和动态性能 取决于闭环极点特征方程旳根。
B.当待定参数变化时特征根随之变 化,这个根旳变化轨迹就形成根轨迹。
C.用来研究根轨迹旳变化规律以及 和闭环系统性能间旳关系旳措施,称为 控制系统根轨迹分析法。
§4.2 根轨迹旳概念
要求: 1)掌握根轨迹旳概念 2)掌握根轨迹幅值条件和相角条件
2)相角条件是决定根轨迹旳充要条件, s平面上一点若满足相角条件,即为根轨迹 上旳一点。
3)幅值方程用于拟定根轨迹上一点旳K值;
根轨迹点
幅值方程
四. 根轨迹与系统性能
1.稳定性 假如系统特征方程旳根都位于S平面 旳左半部,系统是稳定旳,不然是不稳定旳。若
根轨迹穿越虚轴进入右半S平面,根轨迹与虚轴交
另一种问题是,经过解方程求得旳闭环 极点,是在系统参数一定旳情况下求得旳。 但当系统中旳参数变化时,如开环增益K变化 时,又得重新解方程求根,因而很不以便。
为了处理以上问题,1948年,伊万斯提 出了控制系统分析设计旳根轨迹法。
这种措施是根据反馈控制系统旳开环、闭 环极点传递函数之间旳关系,根据一定旳准 则,直接由开环传递函数旳零、极点,求出 闭环极点。从而,比较轻易旳得到系统旳性能.
要点: 1)根轨迹旳概念 2)闭环系统旳特征根旳根轨迹与开环 传递函数旳关系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
School of Electrical, Computer and Telecommunications Engineering
University of Wollongong
ECTE344 – Control Systems
Assignment on Root Locus Analysis
1. Provide some explanation for the following phenomena:
(a) The real axis segment of root locus is located to the left of an odd number of poles
plus zeros of GH(s).
(b) The root locus segments start from poles and ends to zeros.
(c) Breakaway and entry point are calculated from:
0)(=ds
s dK 2. Consider the system shown below:
)84()(2++=
s s s K s G (a) Sketch the root locus of the system. First calculate the following parameters:
•
Real axis segment of the root locus •
The number of zeros at infinity •
The number of asymptotes and their angles •
The centroid of asymptotes •
Departure and arrival angles from the imaginary poles • The intersection with imaginary axis
(b) If the value of the gain K is set to 2, where would the closed-loop poles be located
(calculate it manually)?
(c) For what values of K the system is stable (calculate it manually)?
(d) Using MATLAB draw the root-locus of the above system and confirm the values
obtained in (b) and (c) using the function ‘rlocfind’.
(e) Choose a value K (around 20) for which the system is stable. Using MATLAB
confirm that the step response of the closed loop system is stable.
(f) Choose a value K (around 40) for which the system is unstable. Using MATLAB
confirm that the step response of the closed loop system is unstable.
(g) Using MATLAB, calculate the gain margins and phase margins for (e) and (f).
Compare and analyse the results.。