对无人机测控系统干扰方法的研究
无人机的导航系统抗干扰技术研究与实现

无人机的导航系统抗干扰技术研究与实现无人机的导航系统抗干扰技术研究与实现摘要:随着无人机技术的飞速发展,无人机在各个领域的应用越来越广泛。
然而,无人机在飞行过程中容易受到各种干扰因素的影响,如电磁信号干扰、天气条件变化等。
为了解决这一问题,本研究制定了一项具体的研究方案,包括方案实施、数据采集和分析等环节。
通过对已有研究成果的综合分析和创新,提出了一种新的无人机导航系统抗干扰技术,为解决实际问题提供了有价值的参考。
1. 研究方案1.1 问题提出在无人机的应用场景中,由于电磁信号干扰、天气条件变化等原因,导航系统常常出现失灵或干扰的现象。
目前,无人机导航系统的抗干扰能力还相对较弱。
需要对无人机导航系统抗干扰技术进行研究和实现,以提高无人机的飞行安全和定位精度。
1.2 研究目标本研究旨在通过综合分析已有研究成果,提出一种新的无人机导航系统抗干扰技术,并对该技术进行实现和验证。
具体的研究目标如下:1) 分析已有的无人机导航系统抗干扰技术研究成果;2) 提出一种新的无人机导航系统抗干扰技术;3) 实现并验证该无人机导航系统抗干扰技术;4) 对采集到的数据进行整理和分析,验证该技术的有效性。
2. 方案实施2.1 数据采集需要选择一款具备较强定位能力的无人机,并搭载相应的导航系统。
在实验过程中,我们将分别采集无人机在不同环境条件下的飞行数据。
具体的数据采集步骤如下:1) 在无遮挡的开放区域内,设置飞行任务点和航线,并记录无人机飞行的姿态数据、姿态传感器数据、GPS信号数据等;2) 在不同天气和复杂环境条件下(如森林、建筑密集区域等),分别进行无人机飞行实验,并采集相应的数据;3) 通过无人机上安装的传感器模块,获取附近的电磁信号信息。
2.2 数据整理和分析根据采集到的无人机飞行数据和电磁信号数据,对其进行整理和分析。
具体的步骤如下:1) 对无人机飞行数据进行预处理,包括数据清洗、去噪和校准等;2) 对电磁信号数据进行采样和特征提取,获取干扰源的位置和频率特征;3) 基于已有研究成果,建立模型并对数据进行训练和测试,以获取无人机在不同干扰源下的飞行状况和定位精度;4) 分析数据,评估无人机导航系统的抗干扰能力,并对实验结果进行统计学分析。
无人机通信链路抗干扰手段探析
举 足 轻 重 的 作 用 。
地 面站 产 生 电磁 辐 射 基 于 以 下 两 个 原 因 :(1)传 统 的
应 答 式 测 距 要 求 地 面 站 进 行 电 磁 辐 射 ;(2)即 便 采 用 无 源
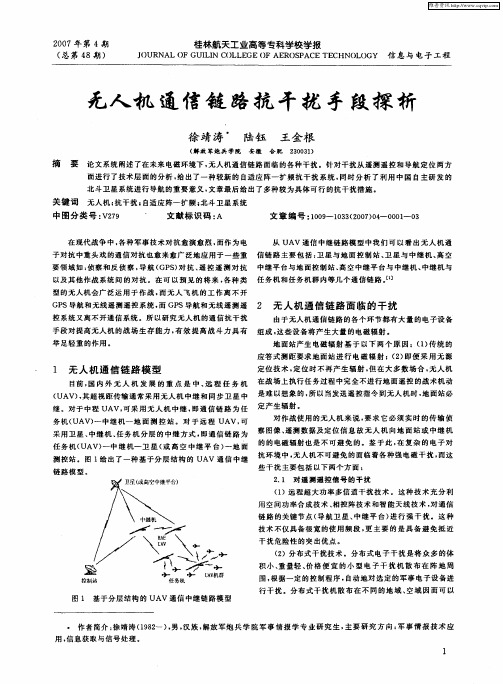
1 无 人 机 通 信 链 路 模 型
定 位 技 术 .定 位 时 不 再 产 生 辐 射 .但 在 大 多 数 场 合 .无 人 机
以及 其 他 作 战 系 统 间 的 对 抗 。在 可 以预 见 的 将 来 ,各 种 类 任 务 机 和 任 务 机 群 内 等几 个 通 信 链 路 。【 ]
型 的 无 人 机会 广 泛 运 用 于 作 战 .而 无 人 飞 机 的 工 作 离 不 开
GPS导 航 和 无线 遥 测 遥 控 系 统 ,而 GPS导航 和 无 线 遥 测 遥 2 无 人 机 通 信 链 路 面 临 的 干 扰
测 控 站 。 图 1给 出了 一 种 基 于 分 层 结 构 的 UAV 通 信 中 继 抗 环 境 中 ,无 人 机 不 可 避 免 的 面 临 着各 种 强 电磁 干 扰 ,而 这
链 路 模 型 。
些 干 扰 主 要 包 括 以下 两个 方 面 :
2.1 对 遥 测遥 控 信 号 的 干 扰
子 对 抗 中 重头 戏 的通 信 对 抗 也 愈 来 愈 广 泛 地 应 用 于 一 些 重 信 链 路 主 要 包 括 :卫 星 与 地 面 控 制 站 、卫 星与 中 继 机 、高 空
要 领 域 如 ;侦 察 和 反 侦 察 .导 航 (GPS)对 抗 、遥 控 遥 测 对 抗 中 继 平 台 与 地 面 控 制 站 、高 空 中 继 平 台 与 中 继机 、中继 机 与
控 系 统 又 离 不 开 通 信 系统 。所 以研 究 无 人 机 的 通 信 抗 干 扰
无人机电磁干扰分析及抗干扰技术研究
无人机电磁干扰分析及抗干扰技术研究无人机作为一种新兴的飞行器,目前已经被广泛应用于军事、民用、科研等多个领域。
然而,在无人机飞行的过程中,很可能会遇到电磁干扰的问题,导致无人机的稳定性和安全性受到影响。
因此,对无人机电磁干扰进行分析和探究,探索抗干扰技术,具有重要的现实意义和应用价值。
一、无人机电磁干扰的来源及特点1.1 无线电发射干扰无线电发射干扰是无人机电磁干扰的主要来源之一,主要包括雷达干扰、通信干扰、电子对抗干扰等。
这些干扰源具有很强的发射功率和电磁辐射能力,容易对无人机造成的电磁波干扰。
1.2 电力设备干扰在无人机附近,存在大量的电力设备,如变电站、高压电线等,这些设备也会产生强电磁场,对无人机造成干扰。
同时,各种电子设备的开关过程中,也会产生快速变化的电磁场,可能对无人机造成干扰。
1.3 大气层干扰大气层中存在着各种类别的电离体和电荷,在无人机高速飞行时,会对飞行器产生影响,如爆炸性电离和大气辐射等干扰。
二、无人机电磁干扰的影响2.1 对飞控系统的干扰由于无人机所采用的飞控系统大多为电子控制系统,而电子控制系统对于电磁场的敏感度很高,因此当其他电磁场干扰无人机时,会造成飞行器的稳定性和控制性能受到影响,甚至导致飞行器失控或坠毁。
2.2 对导航系统的干扰无人机的导航系统包括GPS系统、惯性导航系统等,而这些系统也同样具有电子控制部件,在电磁干扰的情况下,会出现导航定位偏移、导航数据丢失等问题,影响无人机的飞行效果和导航精度。
2.3 对传输数据的干扰无人机的云台摄像、图传等设备,采用的主要是无线传输技术,而在电子干扰的情况下,会导致数据传输不畅,图像模糊和丢失等问题,影响无人机的监测和控制效果。
三、抗干扰防御技术研究3.1 电磁屏蔽技术电磁屏蔽技术是一种稳定、可靠的无人机干扰防御手段之一。
它通常采用一定的金属材料来隔离无人机与外界电磁场的接触,保证飞行器的稳定性。
同时,还可以采用一些特殊材料进行隔离,通过光学折射和化学变化等方式抑制电磁辐射。
无人机电磁干扰分析

软开关技术
▪ 开关电源工作中产生很高的di /dt,dv/dt 是造成污染的重要原因,如实现开关在零 电压和零电流下进行转换,这就会很大程 度上抑制干扰。
活塞发动机
▪ 在决大多数无人机上, 我们使用的是活塞 发动机,而活塞式发动机的点火系统是很 大的一个干扰源。发动机点火系统是由点 火装置(磁电机)、高压线、火花塞3部分组 成,在整个点火系统中,电磁辐射干扰主 要是由次级高压点火电路产生。而且往往 它干扰飞机最为关键的遥控遥测设备。
印制电路板元器件布局及布线
▪ 在印制板的通路尺寸远小于该频率的波长时, 辐 射干扰与电流通路中的电流大小、通路的环路面 积、电流频率的平方等三者的乘积成正比.即 E∝I s f 2。此式表明减小通路面积是减小辐射干 扰的关键,也就是说开关电源的元器件在布局时 要彼此紧密排列,走线尽可能简洁。下面简单介 绍几点设计原则:尽量增大线间距离,使耦合干 扰源与敏感电路间的互感尽可能地小;减小干扰 源和敏感电路的环路面积;尽量使干扰源与敏感 电路布线呈直角,以降低线路间耦合。
▪ 由于雷电产生的电流在电路和飞机的机身 之间可以产生阻压降,钛合金的电阻是铝 的十倍,百倍,因此将来在应用这些材料 的飞机上电压可能是非常大的。
▪ 信号线的分组是必须进行的设计项目。通过信号 线分组,使可能发生的串扰最小。在设计电缆的 最初阶段,尽量的把信号线与回线靠近, 有可能 做到每对容易受干扰的低电平信号线都各自穿屏 蔽套, 尽量不要使这些信号线分散在电缆束中。 同时尽量减少可能互相干扰的导线的平行距离。
减少辐射干扰
▪ (1)控制电缆长度,在满足使用要求的前提下,使 用尽量短的电缆,但是当电缆的长度不能减小到 最高辐射频率波长的一半以下时, 减小电缆长度 没有明显效果:
小型无人机通信干扰系统的研究

小型无人机通信干扰系统的研究小型无人机通信干扰系统的研究摘要:本文针对日益增多的小型无人机造成的通信干扰问题进行了研究。
首先分析了小型无人机对通信的干扰机理,发现其主要是通过频率干扰、信号干扰和电磁辐射干扰等方式对周围通信设备造成影响。
随后通过实验设计,测量了不同类型的小型无人机对通信干扰的影响程度,分析了其对信号质量、传输速率和距离等方面的影响。
最后,本文提出了一系列针对小型无人机通信干扰的解决方法,包括信号频率优化、抗干扰信号处理、电磁辐射屏蔽等方案。
关键词:小型无人机;通信干扰;频率干扰;信号干扰;电磁辐射干扰;解决方案1. 引言近几年来,随着无人机技术的不断发展,小型无人机的普及率越来越高。
虽然小型无人机在军事、民用和商业等诸多领域均有广泛应用,但其也带来了一系列问题。
其中最突出的问题之一就是通信干扰,即小型无人机对周围通信设备造成的干扰。
这种干扰通常表现为频率干扰、信号干扰和电磁辐射干扰等形式,会严重影响通信质量和通信的可靠性。
为了解决小型无人机通信干扰问题,需要对其干扰机理和影响程度进行深入研究,并提出相应的解决方案。
本文将从以上两个方面出发,分析小型无人机对通信设备的干扰机理和影响程度,并提出一些有效的解决方案。
2. 干扰机理分析2.1 频率干扰频率干扰是指小型无人机对通信设备使用的频率进行干扰。
通常情况下,小型无人机所使用的频率与通信设备使用的频率相近,因此容易对其产生影响。
例如,在使用航拍无人机进行拍摄时,其所占用的频率会与周围的通信设备发生冲突,从而导致通信的中断或质量下降。
2.2 信号干扰信号干扰是指小型无人机对通信信号的传输和接收产生的影响。
例如,在使用定位设备时,小型无人机的电磁辐射会对其产生影响,从而导致定位精度下降或完全无法定位。
2.3 电磁辐射干扰电磁辐射干扰是指小型无人机产生的电磁辐射对通信设备的影响。
由于小型无人机的轻便特性,其所搭载的电子、电路和电池等设备往往设计得精简简洁,导致其产生的电磁辐射较为明显。
小型无人机通信干扰系统的研究

小型无人机通信干扰系统的研究随着无人机技术的迅速发展,小型无人机的使用越来越普遍。
然而,无人机的广泛应用也引发了一些问题,其中之一就是无人机的通信干扰问题。
由于小型无人机通信干扰可能导致通信中断、数据丢失等问题,因此研究小型无人机通信干扰系统成为了亟待解决的问题。
主要涉及以下几个方面:首先是干扰源分析。
无人机通信干扰的源头可以是无人机本身的通信设备,也可以是无人机附近的其他无线设备。
通过分析干扰源的类型、频率等参数,可以更好地了解干扰的特点,从而有针对性地采取措施。
其次是信号分析和检测。
对于小型无人机通信干扰系统,需要对干扰信号进行实时监测和分析。
通过对信号的频率、功率、调制方式等参数进行分析,可以及时发现干扰信号的存在,并采取相应的干预措施,以保证通信的可靠性。
再次是干扰抑制技术研究。
干扰抑制技术是解决小型无人机通信干扰问题的关键。
目前常用的干扰抑制技术包括频谱分析、自适应滤波、多径抑制等。
通过研究和改进这些技术,可以提高对小型无人机通信干扰的抑制效果,从而保障通信的正常进行。
最后是干扰对策制定。
针对小型无人机通信干扰问题,需要制定相应的对策,以减少干扰对通信系统的影响。
对策的制定包括了干扰源的隔离、通信设备的优化、信号处理算法的改进等方面。
只有制定出科学合理的对策,才能更好地应对小型无人机通信干扰问题。
综上所述,小型无人机通信干扰系统的研究是当前亟待解决的问题。
通过对干扰源的分析、信号的检测、干扰抑制技术的研究以及对策的制定,可以有效地减少小型无人机通信干扰对通信系统的影响,提高通信的可靠性和稳定性。
未来的研究还需要进一步完善和深入,以应对不断发展的无人机技术和应用需求。
无人机导航系统抗干扰措施_岳长松

2 GPS 导航系统干扰分析
40 dBm,比第二节中得出的 GPS 接收机前端的信号最高
GPS 导航系统干扰通常分为四类:带干扰、连续波干
能量-59.2 dBm 高出约 20 dB,因此 GPS 容易受到干扰。
扰和脉冲干扰。
而当 UHF 天线不处于发射状态时,该环境电平下降到
(1)宽带(WB)干扰指占用两个调制带宽的干扰信号。 20 dBμV 左右,能量约为 -87 dBm,比-59.2 dBm 低 约
SAFETY & EMC No.5 2010
·电磁干扰抑制技术·
GPS ICD(Interface Control Document,接 口 控 制 文
误差,它对理想接收机中的数据检测器很不利。它可以通
档) 文件规定的 GPS 系统 L1 频段 C/A 码信号功率最
过在发射的 GPS 信号中加入衰减校正能力,或者通过估
天线发射功率最小,因此对 GPS 接收天线造成的干扰也 (上接第 28 页) 不同部件的温度限值的划分 。针对
就最少。
表 10a)中的部件,需要在温升测试后把所获得的结果换
(2)在 GPS 接收天线与测控链路的 C 波段设备的
算到环境温度为 40 ℃(如果厂家宣称的设备环境许可温
小信号工作通道之间加入滤波器或衰减器,将影响 GPS
磁环境的电子干扰。而 GPS 接收机依赖于 GPS 卫星(SV) 发射的外部射频(RF)信号工作,所以 GPS 接收机很容易 受到 RF 干扰的影响。RF 干扰能使 GPS 接收机导航精度 性能降低或使 GPS 接收机跟踪完全丢失。 1.1 电磁环境电平
电磁环境电平的定义:在规定的试验地点和时间内, 当试验样品未通电时,已存在的辐射及传导的信号和噪 声电平。
雷达对无人机系统上行链路的干扰仿真研究
2 12 nt f L B in 00 9,hn ) .62 6U io A, ej g10 7 C ia P i
ABS TRACT : e p p ra a y e h Th a e n l z st e UAV o c mmu ia i n s se a an tr d ri t re e c ,p o o e t o n c t y t m g i s a a n e fr n e r p s sa me h d o t sa ls h i l t n s se b s d o i l k tman y a ay e h r c s ft e i tre e c g i s o e tb ih t e smu a i y t m a e n S mu i .I o n i l n l z s t e p o e s o h n e r n e a a n t f UAV e t o to c e s f r h d l fr d ra d UAV,a d p o o e h i l t n me h d o NR a d r mo ec n r l c s ,of s t e mo e a a n a e o n r p s st e smu a i t o f o S n I NR a c l t n c l u a i .T r u h t e a l r c s i lto n il e t ti s r st e v r c t fsmu ai n s se o h o g h l p o e s smu ai n a d f d t s ,i n u e h e a i o i lto y tm. e y
t e r t a o n a i n t i e c re to d r . h o e i lf u d t o g v o r c r es c o
无人机抗干扰控制技术研究

无人机抗干扰控制技术研究伴随着科技的不断发展,无人机的技术与应用越来越成熟,被广泛应用于军事、民用航空、农业等多个领域,然而,无人机飞行中的干扰问题却是不容忽视的。
当前无人机技术研究中,抗干扰控制技术成为研究热点之一,具有重要意义。
一、干扰对无人机飞行的影响干扰是指在无人机飞行过程中,由各种因素引起的阻碍、干扰和干扰。
无人机如能够有效抵御干扰,将极大地提高无人机的安全性和可靠性。
首先,电磁干扰对无人机的正常运行具有重要影响。
在无人机飞行过程中,电磁信号是必要的,如导航、控制等,而环境中存在的电磁干扰包括雷达干扰、通信干扰、电源噪声等,这些干扰源会导致无人机的电磁信号出现丢失、变形等情况,从而影响无人机的导航和控制。
其次,气动干扰也是无人机飞行过程中的一大挑战。
气动干扰是指无人机在飞行过程中所受到的环境气流干扰,如气流涡、颠簸等,这些因素将直接影响到无人机的飞行稳定性和控制性。
再次,磁干扰也是无人机抗干扰控制技术中的难题。
地球正南北极附近的磁场强度很弱,有可能会对无人机的磁力计造成干扰,从而影响飞行稳定性和定位精度。
此外,光学干扰、地形干扰等也是无人机飞行中需要解决的难题。
二、无人机抗干扰控制技术研究现状针对上述干扰问题,国内外的研究人员进行了大量的研究。
1. 电磁干扰抵御无人机电磁干扰主要来自雷达、通信、电源等方面。
目前,针对无人机电磁干扰问题,研究人员提出了多种解决方案。
例如,在无人机的接收机和发射机之间加入滤波器,有助于减少电磁干扰的影响。
此外,通过信号处理和天线阵列技术,也能够有效地解决电磁干扰问题。
2. 气动干扰防御为了抑制气动干扰对无人机的影响,研究人员采用了多种方法,如改进飞行控制算法、增加通信和数据传输频率、增加传感器的采集频率、改进机载传感器的计算方法等。
3. 磁干扰处理针对磁干扰问题,研究人员提出了多种解决方案。
例如,在无人机的陀螺仪中加入地磁传感器,对磁场进行监测和测量,能够有效地抵御磁干扰的影响。
对付无人机的好方法
对付无人机的好方法
首先,可以使用电磁干扰来对付无人机。
电磁干扰是一种常见的对付无人机的方法,通过发射电磁信号来干扰无人机的通信或导航系统,使其无法正常飞行或返回。
这种方法对付无人机的效果比较明显,但需要注意的是,使用电磁干扰设备需要合法授权,否则可能触犯法律。
其次,可以使用无人机拦截器对付无人机。
无人机拦截器是一种专门用来对付无人机的设备,通过发射网、激光或其他手段来拦截无人机,使其无法继续飞行或攻击。
这种方法对付无人机的效果比较直接,但需要注意的是,使用无人机拦截器也需要合法授权,否则可能触犯法律。
另外,可以使用反无人机系统对付无人机。
反无人机系统是一种集成了雷达、光电、红外等传感器和武器系统的设备,可以及时发现并对付无人机。
这种方法对付无人机的效果比较全面,但需要注意的是,使用反无人机系统需要专业的操作人员和严格的管理,以防误伤无辜。
最后,可以使用无人机检测系统对付无人机。
无人机检测系统
是一种通过雷达、光电、红外等传感器来检测无人机的设备,可以及时发现无人机的存在并采取相应的对付措施。
这种方法对付无人机的效果比较隐蔽,但需要注意的是,使用无人机检测系统需要及时响应和准确判断,以防止无人机的危害。
综上所述,对付无人机的好方法有很多种,可以根据实际情况选择合适的方法。
无论采取哪种方法,都需要严格遵守法律法规,确保对付无人机的行为合法合规。
希望以上方法能够对大家有所帮助,保障我们的生活和安全。
无人机电磁干扰分析

系统分析模型
▪ 基于等效电磁端口的分析模型 通过将机载 设备简化为相应的等效电磁发射和接收端 口可以使无人机电磁环境效应分析有章可 循并把研究的重点转移到针对具体对象确 定与之相对应的端口耦合函数上
▪ 从分析方法看系统内电磁环境相对较为稳 定可采用传统确定性信号分析方法 而系统
外电磁环境效应由于具有很强的随机性特 点故而采用统计分析方法可以更为客观地 反映无人机的环境适应能力
▪ 雷电有30KV的尖峰值碳化纤维相对于铝结构来说有更大 的磁敏感性
▪ 考虑接地导体的感应电压到达了400uv必须考虑和它相连 设备和电子控制设备的能忍受的干扰值
▪ 这种干扰相对于雷电作用是更应当考虑的应为它是一个永 久的现象而第二个是瞬态的不经常发生
▪ 内部电磁干扰:航空设备不能干扰飞机上 的电气、电子系统
▪ 外部电磁干扰:雷电核磁脉冲
▪ 无人飞机所用材料:无人机机体常采用复合材 料.如碳化纤维和玻璃钢和外界电磁环境不能有 效隔离使其机载与任务设备完全暴露在外界电磁 波的照射之下机裁天线安装位置极其有限飞机设 计无法为各机载天线提供满意的空间和极化隔离 也无法利用机身遮挡来满足要求
软开关技术
▪ 开关电源工作中产生很高的di /dtdv/dt是 造成污染的重要原因如实现开关在零电压 和零电流下进行转换这就会很大程度上抑 制干扰
活塞发动机
▪ 在决大多数无人机上 我们使用的是活塞发 动机而活塞式发动机的点火系统是很大的 一个干扰源发动机点火系统是由点火装置 磁电机、高压线、火花塞3部分组成在整个 点火系统中电磁辐射干扰主要是由次级高 压点火电路产生而且往往它干扰飞机最为 关键的遥控遥测设备
▪ 4I/O接口电路部分的地线与金属机箱之间 做射频搭接:
▪ 5对机箱内的I/o电缆从线路板到连接器的 部分进行屏蔽;
无人机上行链路抗欺骗干扰技术研究
无人机上行链路抗欺骗干扰技术研究随着无人机技术的不断发展和应用,无人机的控制和通信系统也面临着越来越多的安全威胁。
其中,抗欺骗干扰技术在无人机上行链路通信中起到了至关重要的作用。
本文将从无人机上行链路抗欺骗干扰技术的研究内容、方法和应用等方面进行阐述。
在欺骗干扰信号的检测和识别方面,研究人员通过分析欺骗干扰信号的特征和行为,设计出相应的检测算法。
其中,频谱分析技术是一种常用的方法。
通过对接收到的无人机信号进行频谱分析,可以发现频率偏移、频率跳变、频率扩展等异常行为,从而判断是否存在欺骗干扰信号。
此外,研究人员还可以利用机器学习算法,通过训练样本对欺骗干扰信号进行分类和识别。
在对抗欺骗干扰信号的技术方面,主要有两种方法:一是提高无人机系统的抗干扰性能,二是采用对抗技术。
提高抗干扰性能的方法包括采用高频带宽、高灵敏度的接收器,增加误码纠错码等措施,使得无人机能够更好地抵御干扰信号的影响。
而对抗技术则是指通过发送特殊的信号来对抗欺骗干扰信号。
例如,可以通过发送具有随机性质的干扰信号来破坏欺骗干扰信号的传输,使其无法正常工作。
除了研究无人机上行链路抗欺骗干扰技术的方法,研究人员还将其广泛应用于实际场景中。
无人机在军事、航空、交通等领域的应用越来越广泛,但受到的安全威胁也越来越多。
因此,无人机上行链路抗欺骗干扰技术成为了保障无人机通信安全的重要手段。
总之,无人机上行链路抗欺骗干扰技术的研究对于保障无人机通信安全具有重要意义。
通过采用合适的检测和识别方法,以及增强无人机系统的抗干扰性能,可以有效地防范和对抗欺骗干扰信号的威胁。
随着技术的不断进步,相信无人机上行链路抗欺骗干扰技术将在未来得到更加广泛的应用和发展。
无人机电磁干扰与抗扰技术研究
无人机电磁干扰与抗扰技术研究近年来,无人机的市场经历了快速发展,应用范围也越来越广泛。
但是随着无人机数量的增多,电磁干扰问题也愈发成为研究的焦点。
无人机电磁干扰不仅可能影响其本身的飞行状态,还会对周围的通信、雷达等系统造成干扰。
因此,无人机抗扰技术研究就显得尤为重要。
无人机电磁干扰主要来源于以下几个方面:一、无人机本身的电磁辐射。
由于无人机的电子设备会频繁发射信号,并会产生电磁辐射,从而影响周围的电子设备。
二、无人机接收到的外部电磁干扰。
当无人机接收到外部电磁信号时,如果信号强度太大就会造成干扰,可能导致飞行器出现故障。
三、无人机所在的场所环境。
比如说,赛事现场、大型停车场等地的电磁干扰非常显著,对无人机的影响也更大。
针对这些问题,无人机抗扰技术的研究可分为以下方面:一、无人机电磁辐射控制技术无人机电磁干扰的主要来源之一是其本身的电磁辐射。
因此,探究电磁辐射的规律和机理,制定合适的电磁辐射控制技术方案就显得尤为重要。
一般而言,控制无人机的电磁辐射可从以下几个方面入手:1.合理设计无人机电子系统的结构。
合理设计无人机电子系统的结构可以避免电磁干扰问题的发生。
无人机主要的电子系统包括电池系统、控制系统、通信系统、传感器系统等等。
在设计这些系统时应充分考虑无人机的飞行环境和所需功能,以防止电磁辐射引起干扰问题。
2.选择合适的电磁辐射屏蔽材料。
选用合适的电磁辐射屏蔽材料可以有效地对电磁辐射进行屏蔽,从而控制无人机的电磁辐射。
一般来说,屏蔽材料需要具备良好的吸收和反射特性,才能达到控制电磁辐射的效果。
二、无人机电磁干扰检测与监测技术为了避免无人机的电磁干扰问题,我们需要了解无人机周围的电磁环境,及时发现并解决电磁干扰问题。
通过电磁干扰检测与监测技术,可以对无人机周围的电磁变化进行实时监测,发现问题并及时采取措施,以确保无人机能够稳定飞行。
检测与监测技术主要包括以下几个方面:1.无人机电磁辐射检测技术无人机产生的电磁辐射是导致电磁干扰问题的主要原因之一。
基于深度强化学习的无人机小区间干扰抑制技术研究

doi:10.3969/j.issn.1003-3114.2023.02.018引用格式:黎海涛,吕鑫,张帅,等.基于深度强化学习的无人机小区间干扰抑制技术研究[J].无线电通信技术,2023,49(2):331-337.[LI Haitao,LYU Xin,ZHANG Shuai,et al.Research on UAV Intercell Interference Suppression Based on Deep Reinforcement Learning [J].Radio Communications Technology,2023,49(2):331-337.]基于深度强化学习的无人机小区间干扰抑制技术研究黎海涛,吕㊀鑫,张㊀帅,黄嘉伟(北京工业大学信息学部,北京100124)摘㊀要:无人机(UAV)辅助蜂窝网络的空中基站工作在频谱高度拥挤的场景中,会造成严重空中小区间干扰(Inter-Cell Interference,ICI)而大大降低网络性能㊂为解决该问题,研究了基于深度强化学习的无人机辅助蜂窝网络小区间干扰抑制技术㊂首先建立了无人机辅助蜂窝网络中基于联合波束成形与功率控制(Joint Beamforming and Power Control,JBPC)的抗干扰优化模型㊂然后提出了基于置信区间上界(Upper Confidence Bound ,UCB)Dueling 深度Q 网络(Deep Q Network,DQN)的深度强化学习求解算法,并利用该算法设计了联合波束成形和功率控制的ICI 抑制技术㊂仿真结果表明,基于UCB Dueling DQN 学习的JBPC 干扰抑制技术的收敛性优于DQN 和Dueling DQN 算法,且能达到穷举法的最优容量,有利于提高无人机辅助蜂窝网络性能㊂关键词:无人机辅助蜂窝网络;深度强化学习;置信区间上界;小区间干扰抑制中图分类号:TN929.5㊀㊀㊀文献标志码:A㊀㊀㊀开放科学(资源服务)标识码(OSID):文章编号:1003-3114(2023)02-0331-07Research on UAV Intercell Interference Suppression Based onDeep Reinforcement LearningLI Haitao,LYU Xin,ZHANG Shuai,HUANG Jiawei(Faculty of Information Technology,Beijing University of Technology,Beijing 100124,China)Abstract :In UAV assisted cellular network,due to multiple aerial base stations working in a highly congested spectrum scenario,serious aerial Inter-Cell Interference (ICI)will occur,which greatly reduces network performance.In order to solve this problem,thispaper studies the ICI suppression technology of UAV assisted cellular network based on deep reinforcement learning.First,an optimiza-tion model of Joint Beamforming and Power Control (JBPC)in UAV assisted cellular networks is established.Then,a deep reinforce-ment learning algorithm based on the Upper Confidence Bound (UCB)Dueling Deep Q Network (DQN)is proposed.We utilize the proposed learning algorithm to design the intercell interference suppression technology based on joint beamforming and power control.Simulation results show that the convergence performance of JBPC interference suppression technology using UCB Dueling DQN learning is better than general DQN and Dueling DQN algorithms,which is helpful to improve the capacity of UAV assisted cellular network.Keywords :UAV assisted cellular network;deep reinforcement learning;upper confidence bound;inter-cell interference suppression收稿日期:2022-12-27基金项目:航空科学基金(2018ZC15003)Foundation Item :Aeronautical Science Foundation (2018ZC15003)0 引言随着无线通信技术的快速发展,给无人机(UAV)安装移动通信设备,使无人机成为空中移动基站,与地面通信网络组成一个空地一体化立体无线通信网络,能极大地扩展移动网络的通信范围[1-2]㊂空中无人机还可以组成大规模的机群与地面进行协同工作,这种立体通信系统可以满足未来无线网络的更多业务需求㊂与高平台基站和卫星通信相比,尽管低空无人机基站的通信覆盖范围有限,但其具有成本低㊁灵活度高㊁易于快速部署的优点㊂当遇到紧急情况,能够及时提供应急通信服务,可为短期无线通信提供热点的需求㊂此外,低空通信还可与地面用户进行视距传输,获得更低时延和更高传输速度㊂然而,面对海量的数据传输,如何在保持高频谱资源利用率的基础上提高系统性能,是无线通信应用面临的重要挑战㊂由于无线信道的开放性,无人机网络中多个空中基站共存,通常运行在高度拥挤的频谱场景中,这会造成严重空中小区间干扰(Intell-Cell Interference,ICI)㊂因此,对于由多个空中基站组成的无人机辅助的蜂窝网络,迫切需要研究基站系统具有小区间干扰抑制技术,以提供强大的连通性㊂在地面蜂窝通信系统中,采用多小区间联合波束形成和功率控制(Joint Beamforming and Power Concord,JBPC)技术能较好抑制干扰,但大多采用传统优化方法[3]来求解,计算复杂度高㊂为此,基于深度强化学习算法,从空域和功率域的视角出发,提出波束形成功率控制的多域干扰抑制技术㊂目前,已有一些文献针对联合功率控制和波束成形问题进行了研究㊂文献[4]利用深度Q网络(Deep Q Network,DQN)研究了5G网络的波束成形㊁功率控制和干扰协调的联合设计,以最大限度地降低干扰而提高信噪比㊂文献[5]研究了基于DQN的5G毫米波网络的功率控制方法,可以改善干扰环境下非视距传输性能㊂文献[6]研究了在毫米波多用户场景下联合功率控制和波束成形问题,对具有恒模约束的波束成形矩阵进行设计㊂文献[7-8]研究了在高速移动通信的联合混合波束形成和功率控制设计问题,但采用传输模式固定的波束成形矩阵,不能适应动态干扰场景㊂同时,上述研究中采用一般的深度强化学习算法,其收敛速度较慢而影响其实际应用㊂为了进一步提高无人机辅助的蜂窝通信系统性能,本文提出一种基于置信区间上界(Upper Confidence Bound, UCB)Dueling DQN的波束成形和功率控制多域干扰抑制方法,它具有更快的收敛速度,可以有效抑制无人机基站间干扰达到系统最优容量㊂1 系统模型本文提出的无人机辅助蜂窝网络模型如图1所示,由一定数量的配置空中基站(Base Station,BS)的无人机和随机分布于地面的用户(User Equipment,UE)设备组成,基站站点距离固定并大于覆盖半径以允许重覆盖,地面用户保持匀速移动且方向随机㊂每台无人机基站采用正交频分复用(OFDM)技术与其服务区域内的用户之间保持通信㊂地面控制站负责接收各无人机基站的信息,并通过集中控制器进行联合波束成形和功率控制的干扰抑制处理㊂图1㊀无人机基站通信模型Fig.1㊀UAV base station communication model假设每个无人机基站采用M个阵元的均匀线阵[9-11],则第i个基站内每个用户的接收信号为: y i=h H i,i w i(θ)x i+ðjʂi h H i,j w j(θ)x j+n i,(1)式中,x i,x j分别为第i个服务基站㊁第j个干扰基站的发射信号,满足功率约束E[|x i|2]=P i㊂w i(θ)㊁w j(θ)为第i㊁j个无人机基站的波束成形向量,第n个元素w n(θ)=(1,e j kd cos(θ), ,e j kd(M-1)cos(θ))T,其中d㊁k表示天线间距和波数;h H i,i㊁h H i,j分别为第i㊁j 个无人机基站到UE的信道向量㊂n i为均值为零㊁方差为σ2的噪声㊂式中的第一项为UE接收到的有用信号,而第二项为UE接收到的来自相邻无人机基站的干扰信号㊂用户端的接收信噪比(SINR)为:γi=p i㊃|h H i,i w i(θ)|2σ2+ðjʂi p j㊃|h H i,j w j(θ)|2㊂(2)㊀㊀在由多无人机基站组成的网络中,UE的服务基站可视为另一小区UE的干扰基站,故对于给定无人机基站,当功率控制请求增加发射功率时,无人机基站覆盖小区间干扰协调可能同时请求减少功率,故需要进行合理折衷㊂因此,为最大化无人机辅助蜂窝通信网络的和速率(容量)[12],构建以第i个无人机基站服务小区内用户的接收SINR最大为目标,联合优化基站的波束成形矢量和发射功率的理论模型:maximizeðγis.t.㊀p iɪp㊀γiȡγth{,(3)式中,γth 为用户的目标SINR㊂由于约束的非凸性,该问题属于非凸优化问题㊂若用经典方法解决则需要在高维空间上进行穷举搜索㊂注意到该问题模型为离散马尔可夫决策(Markov Decision Process,MDP)问题,可采用深度强化学习方法来求解,以降低计算复杂度㊂2 基于UCB Dueling DQN 的干扰抑制求解MDP 问题的强化学习算法原理[12]如图2所示㊂Agent 先感知当前工作环境,然后选取一个动作a ,执行该动作后,环境状态s 发生改变,同时生成一个奖励(Reward)值反馈给Agent㊂这时,Agent 根据得到的奖励r 调整自己的决策,同时为新的状态产生策略㊂Agent 与环境不断进行交互,以得到最大的累积奖励㊂常用的Q-learning 算法通过和环境的交互构建状态与动作的二维Q 表,用以储存每个状态 动作对的Q 值,当执行动作时,Agent 从Q 表中选择使得当前状态的Q 值最大的动作,但对于高维且连续的状态和动作空间,难以构造其Q 表㊂图2㊀强化学习原理Fig.2㊀Reinforcement learning principle若状态-动作集较大,近似地估计值函数是较为可行的方法㊂结合强化学习和深度学习而提出的DQN 算法[13],利用神经网络来估计Q 值,替代Q-Learning 算法中的Q 表,能应用于状态-动作集较大的场景㊂DQN 网络包括估计Q 网络(EvaluatedQnetwork)和目标Q 网络(Target Qnetwork)㊂前者根据当前状态生成估计Q 值,它在每个回合(Epi-sode)调整网络权重以减小损失函数(Loss Func-tion):L (τ)=E [(r +μmax aᶄQ (sᶄ,aᶄ,τᶄ)-Q (s ,a ,τ))2]㊂(4)㊀㊀而后者根据下一时刻状态输出对应Q 值,为目标Q 值的计算做准备㊂每隔一段时间,目标Q 网络的参数会得到更新,即把估计Q 网络的参数复制给目标Q 网络㊂为了提供训练样本,DQN 设计了存储历史值的经验回放池(Replay Memory),在学习过程中将Agent 与环境交互得到的四元组(s ,a ,r ,sᶄ)存进一个经验回放池中,在训练时从中随机选择部分样本来训练神经网络,解决了样本的相关性问题,提高训练的稳定性㊂对一些状态而言,因无论执行什么动作对下一个状态的影响均较小,即值函数的大小与动作无关,故无需估计每个动作的Q 值㊂因此,提出了能够快速识别最佳动作并学习到对Agent 较为重要状态的Dueling DQN 方法[14],从而提高学习效率㊂DuelingDQN 的Q 网络具有两个Q 函数:状态函数和独立于状态的动作优势函数㊂其将原DQN 网络输出分成静态环境状态的值函数V 和动态选择动作额外带来的优势函数A ㊂Q 网络的输出由价值函数输出和优势函数输出的组合:Q (s ,a ,τ,α,β)=V (s ,τ,β)+A (s ,a ,τ,α),(5)式中,τ表示网络结构,α,β表示两个全连接层网络的参数,V 仅与状态有关,而A 与状态和动作都有关㊂若仅用这个公式更新,会存在不可辨识性问题,即如V 和A 分别加上和减去一个值能够得到相同的Q 值,但反过来显然无法由Q 得到唯一的V 和A ㊂为了解决该问题,对同一个状态,可以固定状态值函数来更新动作优势函数,即Q (s ,a ,τ,α,β)=V (s ,τ,β)+(A (s ,a ,τ,α)-1|A |㊃ðaᶄA (s ,aᶄ,τ,α)㊂(6)㊀㊀式(6)表明,在状态s 时把动作优势部分设置为当前动作优势函数减去所有动作优势函数的均值,即对优势函数进行中心化处理,从而提高算法稳定性㊂Dueling DQN 在探索过程中采用ε-贪婪算法来选取最优动作㊂然而,贪婪算法不考虑不同动作的优先级,有可能会忽略其他使得累积奖励最大的动作,对信息不重要的数据进行抽样而忽略提供有用信息的样本㊂为了解决这个问题,本文提出在Duel-ing DQN 的学习过程中利用UCB 探索,其结构如图3所示㊂Dueling DQN 利用神经网络来估计Q 值,在经验回放池存储训练样本,并从经验池中采样训练数据(s ,a ,r ,sᶄ),将训练样本输入目标网络和当前网络㊂得到目标Q 值和估计Q 值后,利用梯度下降法计算损失函数,更新当前网络的参数,并将当前网络的值在每T 个时间步后复制到目标网络中㊂图3㊀UCB Dueling DQN 结构Fig.3㊀UCB Dueling DQN structure㊀㊀同时,所提方法在选择动作时利用了UCB 算法,即Agent 通过UCB 探索选择一个动作并执行㊂具体地,Agent 从经验池采样并计算损失函数后,计算动作的优先级并将优先级赋予该动作,动作优先级的计算公式为:p =r j +c㊀ln tN j,N j =N j +1,(7)式中,N j 表示经过t 个时间步后第j 个动作被选择的次数,r j 为选择第j 个动作获得的奖励,c 为调整优先级对其选择动作影响大小的参数㊂置信因子为c㊀ln tN j,当时间步t 较小时,即在算法初始阶段,置信因子较大,因而对优先级的影响较大;随着训练的进行,时间步t 不断增加,置信因子的影响也逐渐降低㊂在t 时刻,若一个动作已经被选了越多次,该动作的奖励值会越高,越会继续采用㊂若一个动作被选的次数较少,则置信因子比较高,即相对尝试的机会更高㊂当算法达到收敛状态,能使得收益最大化㊂基于所提UCB Dueling DQN 算法,本文设计了一种联合波束成形和功率控制的无人机小区间干扰抑制方法[15-16],如算法1所示㊂算法1㊀基于UCB Dueling DQN 的干扰抑制输入:UE 的接收信噪比输出:无人机基站的动作集{波束向量,发射功率}初始化:折扣因子μ,经验池D 容量N ,minibatch 大小D 1:for episode from 1to Limit do 2:观测当前状态s t3:设置初始探索率ε4:随机从[0,1]中取值u5:如果u <ε,从动作集中随机选择一个动作a t 否则选择能使Q 值最大的动作a t 6:for t =0to T -1do7:计算信噪比γeff8:根据γeff 对奖励r 进行更新9:观测下一时刻状态sᶄ10:将得到的四元组(s ,a ,r ,sᶄ)存储到经验池D11:若经验池已满,从经验池中取一批样本进行训练12:计算当前网络Q 的状态值函数V (s ,β)和优势函数A (s ,a ,α)13:将两个网络合并为Q (s ,a ,τ,α,β)14:设y j =r j +μmax aᶄQ15:用随机梯度下降法选择τ∗15:更新网络参数τt =τ∗16:更新状态s t =sᶄ17:计算损失函数L (τ)18:计算选取动作优先级p r =r j +c㊀ln t N j19:N j =N j +120:选取下一时刻动作a t +1=argmax p r21:end for 22:end for㊀㊀算法1中基站采用循环递增或循环递减方式来选择波束成形码本和发射功率构成动作集,即㊃a [0]=0:降低基站b 的发射功率1dB ㊃a [0]=1:增加基站b 的发射功率1dB ㊃a [1]=0:降低基站l 的发射功率1dB ㊃a [1]=1:增加基站l 的发射功率1dB ㊃a [2]=0:降低基站l 的波束成形码本索引㊃a [2]=1:提高基站l 的波束成形码本索引㊃a [3]=0:提高基站b 的波束成形码本索引㊃a [3]=1:降低基站l 的波束成形码本索引3 仿真结果假设用户均匀分布于无人机基站周围半径R =150m 的覆盖区域内,无人机悬停高度100m㊂设定目标信噪比γth =γ0+10log M ,取γ0=5dB,仿真参数如表1和表2所示[17-18]㊂表1㊀环境参数Tab.1㊀Environment parameters仿真参数数值最大传输功率P max /dBm40下行频带/GHz 28无人机基站数量3小区半径R /m 150用户数量10用户移动速度v /(km /h)2用户端天线增益/dBi0天线增益/dBi 3天线数量M {4,8,16,32,64}周期T /ms 10表2㊀网络参数Tab.2㊀Network parameters仿真参数数值折扣因子μ0.995初始探索率ε1探索率衰减系数d 0.9995最小探索率0.10学习率α0.01DQN 网络宽度24DQN 网络深度3激活函数ReLU minibatch 大小32经验池容量N 2000状态集数量8动作集数量16㊀㊀图4给出了所提算法的损失函数,可以看出,其值先增大后减小,原因在于算法开始运行时数据样本较少,模型可能出现过拟合,会在状态-动作对中选取最大值,但其中一些状态-动作对并不适用,故损失函数先逐渐增大㊂该情形会在后续学习过程中得到纠正,故损失函数会逐渐减小㊂从图中还可发现,虽然DQN 和所提UCB Dueling DQN 的损失函数均可收敛,但所提算法的收敛速度更快㊂图4㊀损失函数Fig.4㊀Loss function图5给出了所提算法的收敛回合与系统天线配置的关系,收敛性定义为在算法迭代周期T 时间内无人机基站覆盖用户的接收SINR 达到了目标信噪比γth ㊂与一般的DQN㊁Dueling DQN 算法相比,所提UCB Dueling DQN 算法可以减少收敛回合㊂图5㊀收敛回合与天线数量关系对比Fig.5㊀Comparison between convergence episode andnumber of antennas干扰环境下无人机基站的用户覆盖是无人机辅助蜂窝网络的重要性能指标,设定覆盖用户的接收SINR 不低于目标γth ㊂仿真计算出无人机基站覆盖用户接收SINR 之和的互补充累积分布函数(CCDF),如图6所示,可以看出,在天线数M =32时,所提出的UCB Dueling DQN 算法的CCDF 性能(UE 覆盖)优于DQN 和Dueling DQN 算法㊂图6㊀有效SINR 的覆盖CCDF 对比Fig.6㊀Coverage CCDF plot of the effective SINR利用用户端接收的有效信噪比γeff ,可计算出系统平均和速率C =1T ㊃ðT t =1ðjlb(1+γeff )[19],图7给出了UCB Dueling DQN 和穷举算法的和速率容量,可以看出,所提算法虽计算复杂度低,但能达到穷举法的最优容量㊂图7㊀速率和容量与天线数量关系对比Fig.7㊀Comparison between sum rate capacity andnumber of antennas4 结束语在由多个空中基站组成的无人机辅助蜂窝网络中,各基站间存在严重的小区间干扰㊂为降低干扰,本文研究了基于深度强化学习的干扰抑制技术,先提出具有更快学习性能的UCB Dueling DQN 算法,然后利用该算法设计了联合波束成形和功率控制的小区间干扰抑制技术㊂仿真结果表明,与现有DQN 及其他学习策略相比,所提UCB Dueling DQN 干扰抑制策略具有更好的收敛性能,同时能够达到系统的和速率容量上限,故是一种提高无人机辅助蜂窝通信网络性能的有效方法㊂参考文献[1]㊀SHARMA V,BENNIS M,KUMAR R.UAV-assisted Het-erogeneous Networks for Capacity Enhancement[J].IEEE Communications Letters,2016,20(6):1207-1210.[2]㊀GUPTA L,JAIN R,VASZKUN G.Survey of ImportantIssues in UAV Communication Networks[J].IEEE Com-munications Surveys &Tutorials,2016,18(2):1123-1152.[3]㊀ZHU L,ZHANG J,XIAO Z,et al.Joint Power Control andBeamforming for Uplink Non-orthogonal Multiple Access in 5G Millimeter-wave Communications[J].IEEE Trans-actions on Wireless Communications,2018,17(9):6177-6189.[4]㊀MISMAR F B,EVANS B L,ALKHATEEB A.Deep Rein-forcement Learning for 5G Networks:Joint Beamforming,Power Control,and Interference Coordination [J ].IEEETransactions on Communications,2020,68(3):1581-1592.[5]㊀LUO C,JI J,WANG Q,et al.Online Power Control for 5GWireless Communications:A Deep Q-Network Approach[C]ʊ2018IEEE International Conference on Communi-cations (ICC).Kansas City:IEEE,2018:1-6.[6]㊀LEE C,KIM Y H.Receive Beamforming and ResourceAllocation for Wireless Powered Non-orthogonal MultipleAccess[J].IEEE Transactions on Vehicular Technology,2020,69(4):4563-4568.[7]㊀XU J,AI B,CHEN L.Joint Beamforming and PowerAllocation in Millimeter-wave High-speed Railway Sys-tems[C]ʊProceedings of the 2020IEEE Global Commu-nications Conference.Piscataway:IEEE,2020:1-6.[8]㊀XIAO Z,ZHU L,CHOI J,et al.Joint Power Allocationand Beamforming for Non-orthogonal Multiple Access (NOMA)in 5G Millimeter Wave Communications [J].IEEE Transactions on Wireless Communications,2018,17(5):2961-2974.[9]㊀ALKHATEEB A,EL AYACH O,LEUS G,et al.ChannelEstimation and Hybrid Precoding for Millimeter WaveCellular Systems[J].IEEE Journal of Selected Topics in Signal Processing,2014,8(5):831-846.[10]ROBERT W H J,GONZÁLEZ-PRELCIC N,RANGAN S,et al.An Overview of Signal Processing Techniques forMillimeter Wave MIMO Systems [J ].IEEE Journal ofSelected Topics in Signal Processing,2016,10(3):436-453.[11]SCHNITER P,SAYEED A.Channel Estimation and Pre-coder Design for Millimeter-wave Communications:TheSparse Way[C]ʊ48th Asilomar Conference on Signals,Systems and Computers.Pacific Grove:IEEE,2014:273-277.[12]MNIH V,KAVUKCUOGLU K,SILVER D,et al.PlayingAtari with Deep Reinforcement Learning [J /OL].arXiv Preprint arXiv:1312.5602.[2022-12-25].https:ʊ /abs /1312.5602.[13]JIN C,ALLEN-ZHU Z,BUBECK S,et al.Is Q-learningProvably Efficient?[C]ʊProceedings of the 32nd Inter-national Conference on Neural Information Processing Sys-tems.Montréal:ACM,2018:4868-4878.[14]WANG Z,SCHAUL T,HESSE L,et al.Dueling NetworkArchitectures for Deep Reinforcement Learning[C]ʊPro-ceedings of the 33rd International Conference on Interna-tional Conference on Machine Learning.New York:ACM,2016:1995-2003.[15]周世阳,程郁凡,徐丰,等.基于深度强化学习的无人机间通信链路智能决策[J].信号处理,2022,38(7):1424-1433.[16]孙彦赞,王哲,吴雅婷,等.D2D 网络中联合资源分配和功率控制的干扰协调[J].计算机仿真,2018,35(3):140-144.[17]廖晓闽,严少虎,石嘉,等.基于深度强化学习的蜂窝网资源分配算法[J].通信学报,2019,40(2):11-18.[18]AREF M A,JAYAWEERA S K,MACHUZAK S.Multi-agent Reinforcement Learning Based Cognitive Anti-jamming[C]ʊ2017IEEE Wireless Communications and Networking Conference (WCNC).San Francisco:IEEE,2017:1-6.[19]BAI T,HEATH R W J.Coverage and Rate Analysis forMillimeter-wave Cellular Networks[J].IEEE Transactions on Wireless Communications,2015,14(2):1100-1114.作者简介:㊀㊀黎海涛㊀博士,北京工业大学副教授㊂主要研究方向:智能网络通信与计算㊂㊀㊀吕㊀鑫㊀北京工业大学硕士研究生㊂主要研究方向:网络通信与计算㊂㊀㊀张㊀帅㊀北京工业大学硕士研究生㊂主要研究方向:深度强化学习㊂㊀㊀黄嘉伟㊀北京工业大学硕士研究生㊂主要研究方向:网络通信与计算㊂。
军用无人机信号干扰系统学术

军用无人机信号干扰系统学术军用无人机信号干扰系统是一种用于干扰和干扰敌方军用无人机通信和导航系统的技术设备。
这一系统的学术研究主要包括以下几个方面:1. 通信干扰技术研究:军用无人机通信干扰系统通过发射相干、高能量的干扰信号,以致使敌方无人机的通信链路紊乱、失效或者受到严重干扰,从而实现对其通信能力的干扰。
2. 导航干扰技术研究:军用无人机导航干扰系统通过发射干扰信号来干扰敌方无人机的导航系统,使其无法正确地定位、导航和飞行。
这可以阻止敌方无人机执行任务或者迫使其误入指定区域。
3. 无源干扰技术研究:无源干扰技术主要研究无人机信号干扰系统在无需主动发射干扰信号的情况下如何对敌方无人机进行干扰。
这些技术通常包括对无人机雷达信号的干扰和对无人机无线电通信的干扰。
4. 反制技术研究:军用无人机信号干扰系统还需要研究反制敌方干扰的技术,以便在受到敌方干扰时保持无人机的通信和导航能力。
这包括发展具有抗干扰能力的通信和导航系统,以及对干扰源进行侦测和定位的技术。
5. 系统集成与优化研究:军用无人机信号干扰系统的研究还需要进行系统集成和优化,以确保系统的稳定性、可靠性和有效性。
这包括研究系统的硬件设计、信号处理算法、干扰参数优化等方面的问题。
以上是军用无人机信号干扰系统学术研究的一些方面,这些研究将为军用无人机干扰作战提供技术支撑,提高我军在复杂电磁环境下的作战能力。
6. 电磁环境建模与仿真研究:为了更好地理解和预测军用无人机信号干扰系统的效果,需要进行电磁环境建模和仿真研究。
这包括对军事电磁环境中各种信号的特征进行模拟和分析,以及对干扰系统的性能进行仿真评估和优化。
7. 技术评估与性能分析:军用无人机信号干扰系统的研究还需要进行技术评估和性能分析,以验证系统的有效性和实用性。
这包括对干扰系统的干扰能力、抗干扰能力、信号传输质量等进行评估和优化。
8. 法律、伦理与国际安全研究:军用无人机信号干扰系统的研究还需要考虑法律、伦理和国际安全等因素。
反制无人机的技术和方法

反制无人机的技术和方法随着无人机技术的不断发展,无人机的使用范围也越来越广泛,但是无人机的使用也带来了一些安全隐患,比如无人机可能被用于恐怖袭击、间谍活动等。
因此,反制无人机的技术和方法也变得越来越重要。
一、无人机的特点无人机具有以下特点:1. 体积小、重量轻,易于携带和操作。
2. 飞行高度低,难以被雷达探测。
3. 飞行速度快,难以被拦截。
4. 可以搭载各种传感器和武器,具有多种用途。
1. 电磁干扰技术电磁干扰技术是一种常用的反制无人机的技术。
通过发射电磁波,干扰无人机的通信和导航系统,使其失去控制或迷失方向。
这种技术可以有效地阻止无人机的飞行,但是也可能会对周围的电子设备产生干扰。
2. 激光干扰技术激光干扰技术是一种新兴的反制无人机的技术。
通过发射激光束,干扰无人机的光学传感器和导航系统,使其失去控制或迷失方向。
这种技术可以精确地瞄准无人机,但是需要高精度的激光设备。
3. 网络攻击技术网络攻击技术是一种针对无人机的软件攻击技术。
通过攻击无人机的控制系统,使其失去控制或迷失方向。
这种技术可以在不接触无人机的情况下进行攻击,但是需要对无人机的控制系统有深入的了解。
4. 物理拦截技术物理拦截技术是一种直接拦截无人机的技术。
通过使用无人机拦截器或其他物理设备,将无人机拦截或摧毁。
这种技术可以有效地阻止无人机的飞行,但是需要高精度的拦截设备。
5. 防御措施除了上述技术和方法外,还可以采取一些防御措施来防止无人机的攻击。
比如在重要场所设置无人机监测系统,及时发现无人机的出现;在机场等场所设置无人机禁飞区,禁止无人机的飞行;在军事基地等场所设置反无人机武器系统,对无人机进行拦截和摧毁。
三、结论反制无人机的技术和方法是多种多样的,需要根据实际情况选择合适的技术和方法。
在未来,随着无人机技术的不断发展,反制无人机的技术和方法也将不断更新和完善。
高空无人机载GPS/INS系统干扰效能及对策研究
c o mp l i s h i n g mi s s i o n . Ba s e d o n t h e e s t a b l i s h me n t o f GP S j a mmi n g e q u a t i o n a n d a n a l y s i s o f I NS n a v i g a t i o n e r —
1 6
航 天 电子对 抗
第 2 9卷 第 2期
高 空无 人 机 载 G P S / I N S系统 干 扰 效 能 及 对 策 研 究
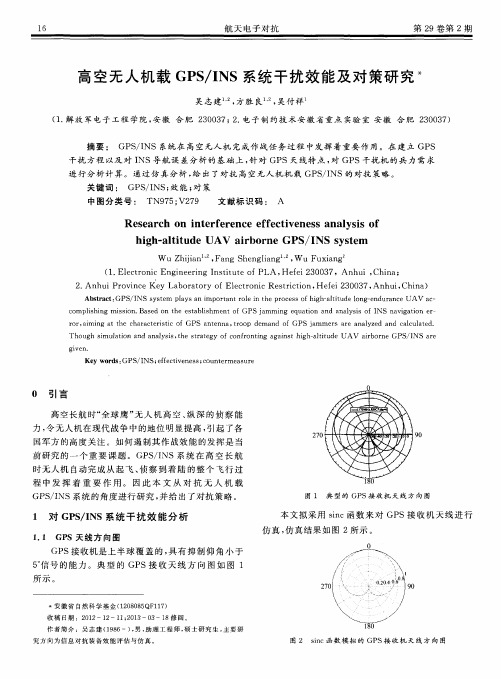
吴 志建 。 , 方胜 良 。 , 吴付 祥 ( 1 . 解放 军 电子 工程 学 院, 安 徽 合肥 2 3 0 0 3 7 ; 2 . 电子制 约技 术安徽 省 重点 实验 室 安徽 合 肥 2 3 0 0 3 7 ) 摘要: G P S / I NS系统在 高空无人机 完成作 战任 务过 程 中发挥 着重要 作 用 。在 建 立 GP S 干扰 方程 以及对 I NS导航误 差 分析 的基础 上 , 针对 GP S天 线特 点 , 对 GP S干扰机 的 兵 力需 求
r o r , a i mi n g a t t h e c h a r a c t e r i s t i c o f GP S a n t e n n a , t r o o p d e ma n d o f GP S j a mme r s a r e a n a l y z e d a n d c a l c u l a t e d . Th o u g h s i mu l a t i o n a n d a n a l y s i s , t h e s t r a t e g y o f c o n f r o n t i n g a g a i n s t h i g h — a l t i t u d e UAV a i r b o r n e GP S / I NS a r e
基于导航欺骗的无人机干扰技术研究与设计
基于导航欺骗的无人机干扰技术研究与设计导航欺骗是指通过干扰目标导航系统的工作原理,误导目标的位置、
速度、方向等信息,从而使目标产生误差或误判的一种技术手段。
随着无
人机技术的不断发展,无人机干扰技术也进行了深入的研究和设计。
首先是对无人机自身导航系统的改进。
无人机的导航系统通常包括定
位系统、姿态传感器和飞行控制系统等。
针对定位系统,可以采用多频段、多天线的GPS接收机,增加接收机的抗干扰能力,提高定位精度;同时,
可以引入其他导航系统,如惯性导航系统、光学导航系统等,以增强定位
的稳定性和精度。
对于姿态传感器,可以采用多种传感器进行信息融合,
提高姿态的测量精度和稳定性。
在飞行控制系统方面,可以采用自主飞行
控制算法,将多传感器的信息进行融合,实现对无人机飞行的自主控制,
提高其抗干扰能力。
此外,在无人机干扰技术的研究与设计中,还需要考虑到法律和道德
的因素。
无人机干扰技术的合法性和使用范围还需要进一步明确和规范。
同时,还需要注意对无人机干扰技术的伦理和安全性的考虑,以避免对其
他正常飞行的无人机和人员造成不必要的危险。
综上所述,基于导航欺骗的无人机干扰技术的研究与设计是一个复杂
而有挑战性的任务。
通过对无人机自身导航系统的改进和对目标无人机导
航系统的干扰,可以实现对目标无人机的干扰和控制。
然而,在研究与设
计过程中,还需要考虑到法律、道德以及安全性的问题,以确保技术的合
法性和有效性。
安保无人机反制调研报告
安保无人机反制调研报告安保无人机反制调研报告目前,随着科技的不断发展,无人机技术得到了广泛应用,无人机在农业、航拍、快递等领域展示了巨大的潜力。
然而,无人机技术也存在一定的安全风险,如隐私侵犯、非法侵入等问题。
因此,对于无人机的安保和反制技术也变得尤为重要。
1. 无人机安全威胁分析为了确定无人机安全风险,我们首先需要对无人机的威胁进行分析。
根据研究,无人机可能存在的威胁包括但不限于以下几个方面:1.1 间谍和监视无人机可以被用作间谍工具,用来监视敏感区域或个人。
这种情况下,无人机可以通过载荷设备如摄像头、红外传感器等,收集大量的情报数据。
1.2 恐怖主义和非法活动无人机可以被用来进行恐怖主义活动或其他非法行为,如投掷爆炸物、监听通信、破坏基础设施等。
1.3 窃密和盗窃无人机可以被用来窃取商业机密或个人隐私。
无人机可以携带高性能相机和传感器,用来窃取机密信息。
1.4 防空威胁无人机也可以对安全设施和活动构成防空威胁。
无人机可以被用来突破安保系统,进入禁飞区域,对活动进行干扰。
2. 无人机反制技术研究为了应对无人机的安全威胁,目前已经有一些无人机反制技术得到了研究和应用。
2.1 电磁干扰技术电磁干扰技术是一种常见的无人机反制技术。
通过向无人机发射电磁波,可以干扰无人机的通信和导航系统,使其失去控制或返回原点。
2.2 高能激光武器高能激光武器可以通过向无人机发射高能激光束,瞬间烧毁无人机的导航系统或起火破坏无人机。
2.3 导弹拦截系统导弹拦截系统可以通过发射导弹迎击无人机。
这种系统一般用于保护高价值目标,如政府机构或军事设施。
2.4 无线电频谱干扰无线电频谱干扰是指通过发射高功率无线电信号,干扰无人机的遥控信号。
这种技术可以使无人机失去控制或者迫使它返回原点。
3. 无人机反制技术发展趋势虽然目前无人机反制技术已经取得了一些进展,但仍然存在改进的空间。
无人机技术的不断发展也需要无人机反制技术的跟进。
3.1 智能化反制随着人工智能的发展,智能化反制技术将会成为无人机反制技术的重要组成部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
联 系的唯 一通 道 , 因此 对 无 人 机测 控 系 统 的有 效 干 扰成 为 战场上 抑制 无人机 行动 的一 大法宝 。
l i n k: r e l a y s t at i o n
0 引 言
2 0 1 1 年 1 2月 4日, 伊 朗媒 体 公 布 伊 朗 军方 于 该 国东 部 击 落 1架 美 军 无 人 驾 驶 侦 察 机 , 型 号 为 R Q 一 1 7 0 。探 其原 因 , 双 方说 法各 不 相 同 。美 军 的解 释是无 人机 与地 面 指挥 站 失 去 信 息联 系 , 无 人 机进
关 键词 : 无人 机; 测控系统 ; 地面控制站 ; 数据链 ; 中继站
中图分类 号 : T N 9 7 5
文献标 识码 : A
文章 编号 : C N 3 — 0 0 2 4 — 0 4
Re s e a r c h i n t o Th e J a mm i n g Me t h o d s t o UAV Me a s u r e me n t a n d Co n t r o l S y s t e m
o f u n ma n n e d a e r i a l v e h i c l e( UAV ) , d e s c r i b e s t h e o p e r a t i n g p r i n c i p l e o f me a s u r e me n t a n d c o n t r o l
成对 无人机 的遥 控 、 遥测、 跟 踪 定 位 和 视 频 信 息 传
输, 实 现对无 人机 的远距 离 操 纵 和侦 察 信 息 的实 时 获取 。其性 能和规 模在 很大程 度上决 定 了整个无 人 机 系统 的性 能 和规模 。
1 . 2 发 展 现 状
控系统 的失 灵有 着密 切联 系 。而无人 机测控 与信 息 传输 系统 是无人 机 电 子信 息 系 统 的核 心 , 是 无 人 机
陆 文博 , 刘春 生, 黄 中瑞
( 电子工程学院, 合肥 2 3 0 0 3 7 )
摘要: 介绍 了无人机测控系统的发展及组 成 , 描述 了测控系统 的工作 原理 , 从地 面控制站 、 数据链 、 中继站三方 面阐
述 了对 无 人 机 测 控 系 统 的 干 扰方 法 , 探 讨 了 对 数 据 链 的 干扰 途径 。
I i n k. Ke y wo r d s : un ma nn e d a e r i a l v e hi c l e; me a s u r e me n t a n d c o nt r o l s ys t e m; gr o un d c o nt r ol s t a t i o n; d a t a
2 0 1 3年 4 月 第 3 6卷第 2 期
舰 船 电 子 对 抗
SH I PBO A RD ELECTRO N I C CO U NT ERM EASU RE
A pr . 2 01 3
Vo 1 . 3 6 NO . 2
对 无 人机 测 控 系统 干扰 方 法 的研 究
s y s t e m, e x p a t i a t e s t h e me t h o d s t o j a m t h e me a s u r e me n t a n d c o n t r o l s y s t e m o f UAV f r o m t h r e e a s —
1 无 人 机 测 控 系 统 的概 念及 发 展 现 状
1 . 1 无人机 测控 系统 的概念 无 人机 测控技 术是 指对无 人机进 行遥 控 、 遥测、
跟踪定 位和 载荷信 息 传 输 的技 术 , 又 称 无人 机 测 控 与信 息传输 技术 。无人 机测控 系统 是无人 机 系统 的
LU We n - bo, LI U Chu n — s he ng, HU ANG Zh on g — r ui
( E l e c t r o n i c En g i n e e r i n g I n s t i t u t i o n, He f e i 2 3 0 0 3 7 , Ch i n a )
Ab s t r a c t : Thi s pa pe r i n t r o du c e s t he de v e l op me nt a nd c omp os i n g o f me a s ur e me n t a nd c o n t r ol s y s t e m
重要 组成部 分 , 由数据链 和地 面控制 站组成 , 用 于完
入 自主飞行 状 态 , 但 出现 机 械 故 障 , 坠 落 在 伊 朗境
内 。而伊 朗方 面 则 声 称 是 他 们 运 用 了 电子 干 扰 战 法, 截 获并 控制 了无人 机 , 让无人 机按 照 自己 的指令 降落在 伊 朗境 内 。 从 上 述 2种解 释来 看 ,RQ _ 1 7 0的 坠 毁 与 其 测
p e c t s o f g r o u n d c o n t r o l s t a t i o n , d a t a l i n k a n d r e l a y s t a t i o n, d i s c u s s e s t h e j a mmi n g a p p r o a c h t o d a t a