小型搬运机械手结构及PLC控制系统的设计
小型搬运机械手控制系统设计
、
接线 复 杂
、
,
因而 控制装 置 体积 很 大
_1]
。
.
并 且 故 障率 高
可 靠性差
动作精确度低
、
使用
、
P L C 的 自动 控 制
。
系统
体积小
、
可 靠性 高
故 障率 低
动作精 度 高
。
因此 为 了方
便
,
可 以 采用 P L C 控制 的机 械手 控 制 系统
2
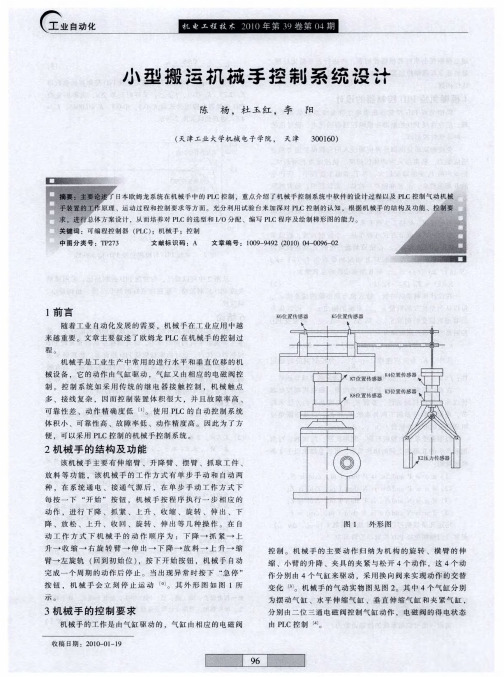
机 械 手 的结构 及 功 能
该机 械 手 主 要 有 伸缩 臂
—
—
横 向仲 山
卜 _ _ - T } F _ ——_ _ ( 二
0 01 0 0 口 讲 02
O O O1 O
手臂 降
卜 _ — 卜 _ _ _ r
—<二 —<=
抓 敬 物 体
O t 毡吐
卜_ _ J
∞ ∞ 5 O 堪 岫7 啪∞ 虮
手臂 上卅
H卜 - _ 广 _ - 7 H
卜 - 一
图 2 机 械 手 气 动 实 物 图
4总体 方 案
根 据 需 要 设 计 总 体 方 案 。初 始 位 置 在 物 块 上 方 .机 械 手 处 于 上 升 状 态 、伸 长 状 态 、机 械 手 松 开 。通 过 机 械 手 的
0 0 0 0 4
。 。 ∞0 0 o o o I
o | I m
} _ _ _ _ T
mt ∞
—(
_l I
o L I o 穹
I
_ _ J
7 ;
~
“
启 动
小型搬运机械手的PLC控制系统设计

小型搬运机械手的PLC控制系统设计
小型搬运机械手的PLC控制系统设计包括以下几个方面:
1. 确定系统需求:首先需要明确机械手的工作任务和工作环境,包
括搬运物品的重量、尺寸和形状,以及工作空间的限制。
2. 选择适当的PLC:根据系统需求选择合适的PLC,考虑其输入输
出点数、通信接口、处理能力和可靠性等因素。
3. 确定传感器和执行器:根据机械手的工作任务选择合适的传感器
和执行器,例如光电传感器、接近开关、压力传感器、伺服电机等。
4. 确定控制策略:根据机械手的工作任务确定控制策略,包括运动
控制、路径规划、物体识别等。
5. 编写PLC程序:根据控制策略编写PLC程序,使用相应的编程语
言(如 ladder diagram、structured text 等),实现机械手的自
动化控制。
6. 连接传感器和执行器:根据PLC的输入输出点数,将传感器和执
行器与PLC连接起来,确保数据的准确传输和控制信号的可靠输出。
7. 调试和测试:完成PLC程序编写后,进行调试和测试,验证系统
的功能和性能是否满足需求,对程序进行优化和修正。
8. 系统集成和实施:将PLC控制系统与机械手进行集成,确保系统
的稳定运行和安全性。
9. 运维和维护:定期对PLC控制系统进行维护和保养,包括检查传
感器和执行器的工作状态,更新PLC程序,修复故障等。
需要注意的是,小型搬运机械手的PLC控制系统设计需要根据具体
的应用场景和要求进行定制,以上仅为一般性的设计步骤和考虑因素,具体设计还需根据实际情况进行调整和优化。
搬运机械手PLC课程设计报告分析

等级:课程设计课程名称电气控制与PLC课程设计课题名称搬运机械手控制系统设计专业班级学号姓名指导老师年月日电气信息学院课程设计任务书课题名称搬运机械手控制系统设计姓名专业班级学号指导老师课程设计时间教研室意见同意开题。
审核人:一.任务及要求设计任务:以PLC为核心,设计一个搬运机械手控制系统,为此要求完成以下设计任务:1.根据搬运机械手的基本结构、工艺过程和控制要求,确定控制方案。
2.配置电器元件,选择PLC型号。
3.绘制传送带A、B的拖动电机的控制线路原理图和搬运机械手控制系统的PLC I/O 接线图。
设计PLC梯形图程序,列出指令程序清单。
4.上机调试程序。
5.编写设计说明书。
设计要求1.一般要求:(1)所选控制方案应合理,所设计的控制系统应能够满足搬运机械手的工作过程要求,并且技术先进,安全可靠,操作方便。
(2)所绘制的设计图纸符合国家标准局颁布的GB4728-84《电气图用图形符号》、GB6988-87《电气制图》和GB7159-87《电气技术中的文字符号制定通则》的有关规定。
(3)所编写的设计说明书应语句通顺,用词准确,层次清楚,条理分明,重点突出。
2.具体要求:(1)连续工作方式:在搬运机械手处于初始状态的情况下,按下启动按钮时,要求搬运机械手能够自动地一个循环接一个循环地工作下去,直至实际循环的次数达到设定的次数并返回到初始状态时才自动停止。
(2)单周工作方式:在搬运机械手处于初始状态的情况下,按下启动按钮时,要求搬运机械手能够自动地完成一个循环的工作下去。
当搬运机械手完成一个循环的工作并返回到初始状态时能自动停止。
(3)单机手动工作方式:要求能对机械手和传送带A、B的拖动电机进行手动操作。
二.进度安排1.第一周星期一:布置课程设计任务,讲解设计思路和要求,查阅设计资料。
2.第一周星期二~星期四:详细了解搬运机械手的基本组成结构、工艺过程和控制要求。
确定控制方案。
配置电器元件,选择PLC型号。
项目10 PLC控制搬运机械手设计

• 1.垂直气缸、水平气缸选择 • (1)类型选择。 • 现有的工作要求和条件如下: • 1)要求当气缸到达行程终端时无冲击现象和撞击噪声,因此选择缓冲
气缸; • 2)要求重量轻,因此选择轻型气缸; • 3)要求安装空间窄且行程短,因此可选择薄型气缸; • 4)若有横向负载,可选带导杆气缸; • 5)要求制动精度高,应选择锁紧气缸; • 6)若不需要活塞杆旋转,可选择杆不回转气缸。
上一页 下一页 返回
10. 1搬运机械手设计案例导入
• 10. 1. 3材料选择
• 机器人手臂的材料应根据手臂的工作状况来选择,并满足机器人的设 计及制作要求。从设计的思想出发,机器人的手臂要求完成各种运动。 因此,对材料的一个要求是作为运动的部件,它应是轻型材料。另一 方面,手臂在运动过程中往往会产生振动,这必然会大大降低它的运 动精度,所以在选择材料时,需要对质量、刚度、阻尼进行综合考虑, 以便有效地提高手臂的动态性能。此外,机器人手臂选用的材料与一 般的结构材料不同。机器人手臂是一种伺服机构,要受到控制,必须 考虑它的可控性。可控性还要与材料的可加工性、结构性、质量等性 质一起考虑。总之,在选择机器人手臂材料时,要考虑强度、刚度、 重量、弹性、抗振性、外观及价格等多方面因素,下面为几种常见机 器人手臂材料:
上一页 下一页 返回
10. 1搬运机械手设计案例导入
• (1)碳素结构钢和合金结构钢等高强度钢:这类材料强度好,尤其是合 金结构钢强度增加了4~ 5倍,弹性模量大、抗变形能力强,是应用最 为广泛的材料。
• (2)铝、铝合金及其他轻合金材料:其共同特点是重量轻,弹性模量不 大,但是材料密度小,其(E/P)之比仍可与钢材相比。
上一页 下一页 返回
干货PLC编程案例之控制机械手实现简单搬运
干货PLC编程案例之控制机械手实现简单搬运
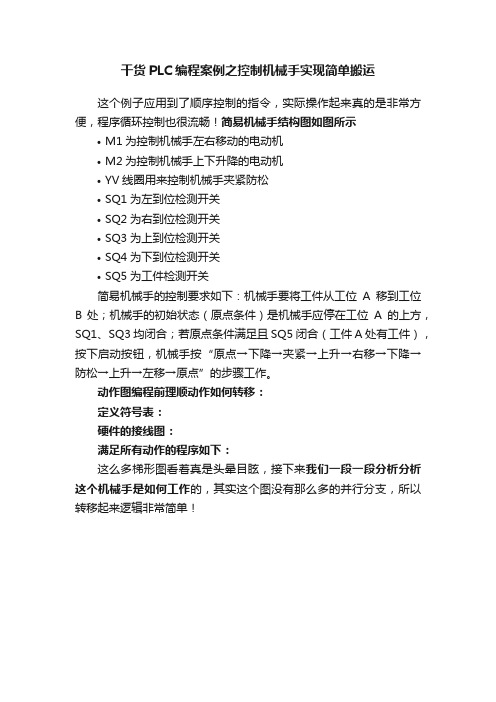
这个例子应用到了顺序控制的指令,实际操作起来真的是非常方便,程序循环控制也很流畅!简易机械手结构图如图所示
•M1为控制机械手左右移动的电动机
•M2为控制机械手上下升降的电动机
•YV线圈用来控制机械手夹紧防松
•SQ1为左到位检测开关
•SQ2为右到位检测开关
•SQ3为上到位检测开关
•SQ4为下到位检测开关
•SQ5为工件检测开关
简易机械手的控制要求如下:机械手要将工件从工位A移到工位B 处;机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
动作图编程前理顺动作如何转移:
定义符号表:
硬件的接线图:
满足所有动作的程序如下:
这么多梯形图看着真是头晕目眩,接下来我们一段一段分析分析这个机械手是如何工作的,其实这个图没有那么多的并行分支,所以转移起来逻辑非常简单!。
基于PLC的生产线搬运机械手控制系统设计

毕业论文题目基于PLC的生产线搬运机械手控制系统设计姓名薛博隆学号**********专业班级机电一体化1302指导教师钱振华2016年 4 月 20 日湖职院机电一体化专业毕业论文基于PLC的生产线搬运机械手控制系统设计学生:薛博隆指导教师:***摘要搬运机械手在自动化生产线上是一个重要的装置,他能精确定位并抓起工件搬运到另一个工作站并放下,具有故障报警,安全稳定的功能。
系统采用的是PLC控制。
文中通过对生产线的分析,确定了生产线搬运机械手的机械结构,通过对机械手的工作原理与机械手的控制要求,确定了适合的PLC 型号进行了I/O口的分配,对伺服电机的定位控制进行了软件设计。
研究表明,机械手具有良好的位置控制精度,运行的可靠稳定性,和简单的控制方法。
关键词:生产线机械手;气动原理;伺服电机;PLC目录摘要 ....................................................................................................................................................................... 目录 ....................................................................................................................................................................... 第一章前言 (1)第二章生产线机械手的结构及工作原理 (2)2.1 自动化生产线布局与原理......................................................................................... 错误!未定义书签。
完整版)基于plc的机械手控制系统设计

完整版)基于plc的机械手控制系统设计机械手由机械结构、控制系统和执行器三部分组成。
机械结构是机械手的基本骨架,包括机械手臂、手爪等组成部分。
控制系统是机械手的大脑,负责控制机械手的运动和操作。
执行器是控制系统的输出部分,负责执行控制系统的指令,驱动机械手完成各种动作。
机械手的组成部分相互协调,共同完成机械手的工作任务。
2 PLC控制系统简介2.1 PLC概述PLC是可编程控制器的简称,是一种专门用于工业自动化控制的通用控制器。
它以微处理器为核心,具有高可靠性、强抗干扰能力、良好的扩展性和灵活性等特点。
PLC广泛应用于工业生产中的自动化控制领域,如机械制造、化工、电力、交通、冶金等行业。
2.2 PLC控制系统组成PLC控制系统主要由PLC主机、输入输出模块、编程软件和人机界面组成。
PLC主机是PLC控制系统的核心,负责控制整个系统的运行和实现各种控制功能。
输入输出模块负责将外部信号转换为PLC可以处理的数字信号,并将PLC输出信号转换为外部可控制的信号。
编程软件用于编写PLC程序,实现控制系统的各种功能。
人机界面是PLC控制系统与用户之间的接口,用于实现人机交互,方便用户对控制系统进行操作和监控。
3 基于PLC的机械手控制系统设计3.1系统设计思路本文设计的基于PLC的机械手控制系统主要由PLC控制系统、步进电机驱动系统和机械手组成。
PLC控制系统负责控制机械手的运动和操作,步进电机驱动系统负责驱动机械手的运动,机械手负责完成各种动作任务。
系统设计采用模块化设计思路,将系统分为PLC控制模块、步进电机驱动模块和机械手运动模块,分别进行设计和实现,最后进行整合测试。
3.2系统设计方案PLC控制模块采用西门子PLC作为控制核心,通过编写PLC程序实现机械手的控制和操作。
步进电机驱动模块采用步进电机驱动器和步进电机组成,通过PLC控制信号驱动步进电机实现机械手的运动。
机械手运动模块由机械结构、执行器和传感器组成,通过步进电机驱动器驱动执行器完成机械手的各种动作,通过传感器检测机械手的运动状态并反馈给PLC控制系统。
机械手PLC控制系统设计
机械手PLC控制系统设计一、本文概述随着工业自动化程度的不断提高,机械手在生产线上的应用越来越广泛。
作为一种重要的自动化设备,机械手的控制精度和稳定性对于提高生产效率和产品质量具有至关重要的作用。
因此,设计一套高效、稳定、可靠的机械手PLC控制系统显得尤为重要。
本文将详细介绍机械手PLC控制系统的设计过程,包括控制系统的硬件设计、软件设计以及调试与优化等方面,旨在为相关领域的工程师和技术人员提供有益的参考和借鉴。
本文首先将对机械手PLC控制系统的基本构成和工作原理进行概述,包括PLC的基本功能、选型原则以及与机械手的接口方式等。
接着,将详细介绍控制系统的硬件设计,包括PLC的选型、输入输出模块的选择、电源模块的设计等。
在软件设计方面,本文将介绍PLC 编程语言的选择、程序结构的设计、控制算法的实现等关键内容。
本文将介绍控制系统的调试与优化方法,包括PLC程序的调试、机械手的运动调试、控制参数的优化等。
通过本文的介绍,读者可以全面了解机械手PLC控制系统的设计过程,掌握控制系统的硬件和软件设计方法,以及调试与优化的技巧。
本文还将提供一些实用的设计经验和注意事项,帮助工程师和技术人员在实际应用中更好地解决问题,提高控制系统的性能和稳定性。
二、机械手基础知识机械手,也称为工业机器人或自动化手臂,是一种能够模拟人类手臂动作,进行抓取、搬运、操作等作业的自动化装置。
在现代工业生产中,机械手被广泛应用于各种环境和使用场景,以实现生产线的自动化、提高生产效率、降低人力成本以及保障操作安全。
机械手的构成主要包括执行机构、驱动系统、控制系统和位置检测装置等部分。
执行机构是机械手的动作执行部分,通过模拟人类手臂的旋转、屈伸、抓放等动作,实现物体的抓取和搬运。
驱动系统为执行机构提供动力,常见的驱动方式有电动、气动和液压驱动等。
控制系统是机械手的“大脑”,负责接收外部指令,控制驱动系统使执行机构完成预定动作。
位置检测装置则负责检测执行机构的精确位置,为控制系统提供反馈信号,以确保机械手的作业精度。
(完整版)基于PLC的搬运机械手控制系统设计112
基于PLC的搬运机械手控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好的节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
本机械手的机械结构主要是曲轴在两条生产线之间搬运任务的搬运机械手控制系统进行设计。
采用了电气一体化的设计方案,使用带自锁功能的气缸实现了机械手对工件的抓放和保证了在断气状态下机械手状态的保持,通过伺服电机来实现机械手在水平、竖直方向快速精确的移动。
采用SIEMENS公司的SIMATIC S7-200系列PLC 作为核心控制器,外扩定位模块EM253模块对伺服电机进行精确的定位控制,从硬件和软件两个方面进行设计,完成了PLC在搬运机械手中硬件连接,I/O点分配和应用程序的设计,实现了机械手的上电初始化、零点复位、故障报警、手动运行、半自动运行和在无人看守时的自动运行。
最终达到设计要求,完成搬运目的。
关键词搬运机械手定位模块EM2253控制系统可编程PLC SIMATIC S7-200 系列PLC 核心控制器。
目录目录 (2)1引言 (1)1.1 搬运机械手的应用简况 (1)1.2机械手的应用意义 (2)2系统设计 (2)2.1系统结构及流程 (2)2.2系统主要部件选择 (4)2.2.1气缸的选择 (5)2.2.2阀门的选择 (6)2.2.3行程开关的选择 (6)2.2.4接近开关的选择 (6)2.2.5驱动电机的选择 (6)3控制系统的硬件设计 (7)3.1控制系统功能 (7)3.2控制系统硬件结构 (8)3.2.1位控模块 (8)3.2.3控制系统硬件结构 (9)3.3操作面板的设计 (9)3.4 PLC系统设计 (11)3.4.1 PLC 的I/O 分配表 (11)3.4.2 PLC 的I/O 接线图 (11)3.5运动控制系统的实现 (12)3.6控制系统电路设计 (17)4系统软件的设计与实现 (19)4.1系统工作方式 (19)4.2程序设计 (19)4.2.1主程序设计 (19)4.2.2初始化子程序设计 (20)4.2.3复位子程序设计 (20)4.2.4报警子程序设计 (21)4.2.5手动运行子程序设计 (21)4.2.6半自动运行子程序 (22)4.2.7自动子程序设计 (23)5结束语 (25)致谢 (26)参考文献 (27)附录1系统配件清单 (28)附录2程序清单 (28)1引言1.1搬运机械手的应用简况在现代工业中,生产过程的机械化、自动化已成为突出的主题。
搬运机械手的PLC控制系统设计论文
搬运机械手的PLC控制系统设计摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及。
其主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。
首先研究机械手组成结构、工作原理和控制要求。
机械手主要由两个步进电机来实现机械手的左移右移和上升下降运动,一个交流电动机控制搬运机械手的正反转运动。
搬运机械手的动作转换主要由设置在各个不同部位的行程开关产生的通断信号传输到PLC中进行控制,从而实现本机械手的精确定位。
其动作过程包括:下降、夹紧、上升、正转、右移、下降、放松、上升、左移、逆转;其操作方式包括:回原点、手动、单周期、连续四种方式来满足生产中的各种操作要求。
其次确定了机械手运动形式,设计了机械手主要的组成机构,对搬运机械手运动控制进行了总体方案设计。
提出了机械手的PLC控制系统,并选取了合适的PLC、扩展模块型号,绘制了搬运机械手输入输出接线图、电气接线图。
根据机械手的工作流程制定了可编程序控制器的控制方案,设计了机械手工作时的梯形图,在实验室进行了程序的调试、运行。
关键词:搬运机械手,可编程逻辑控制器,步进电机Handling Manipulator's PLC Control System DesignABSTRACTWith the popularization and development of industrial automation, the controller demand is increasing year by year, and the handling robot applications are becoming more common. Its main in the automotive, electronics, machining, food, medicine and other areas of production lines or cargo transported, can be better to save energy and to improve the efficiency of the transport equipment or products, in order to reduce the limitations and shortcomings of the other handling methods, meet modern the requirements of economic development.First, we study the robot structure, working principle and control requirements. Manipulator by two stepper motors to the robot's left right and up and down movement, an AC motor control handling robot reversing movement. Handling robot action conversion set in different parts of the trip switch off signals transmitted to the PLC control, in order to achieve the precise positioning of the robot. Its course of action, including: drop, clamping, rise, turning, moves right, drop, relax, rise, moves left, reverse; its mode of operation including: homing, manual, single cycle, continuous four ways to meet the production a variety of operating requirements. Second, determine theform of movement of the robot, design the robot main constituent bodies, and design the handling robot motion control of the overall program. Put forward the manipulator of PLC control system, and select the appropriate PLC expansion module model, draw a handling robot input and output wiring diagram, electrical wiring diagram.Based on the workflow of the robot control program of the programmable logic controller, we design a robot work ladder, and debug run in the laboratory.Key words:Handling manipulator, programmable logic controller, stepper motor目录摘要 0ABSTRACT (1)第1章绪论........................................... 错误!未定义书签。
plc课程设计机械手搬运

plc课程设计机械手搬运一、课程目标知识目标:1. 学生能理解PLC(可编程逻辑控制器)的基本原理,掌握其编程方法。
2. 学生能了解机械手的结构、功能及其在工业自动化中的应用。
3. 学生能掌握机械手搬运过程中的控制要求,如运动轨迹、速度调节等。
技能目标:1. 学生能运用所学知识,设计出符合实际需求的PLC程序,实现机械手的搬运功能。
2. 学生能通过小组合作,进行程序调试,解决实际问题,提高团队协作能力。
情感态度价值观目标:1. 学生对工业自动化产生兴趣,认识到PLC技术在现代工业中的重要性。
2. 学生在学习过程中,培养勇于探索、积极创新的精神,提高解决问题的能力。
3. 学生通过课程学习,树立正确的价值观,认识到科技发展对国家和社会的积极影响。
课程性质:本课程为实践性较强的课程,结合理论知识与实际操作,使学生能够学以致用。
学生特点:学生具备一定的PLC基础知识,对实际操作有较高的兴趣。
教学要求:教师需结合学生特点,采用任务驱动法、分组合作等形式,引导学生主动探究,注重培养学生的实践能力和团队协作精神。
通过课程学习,使学生在知识、技能和情感态度价值观方面取得具体的学习成果。
二、教学内容本课程教学内容主要包括以下三个方面:1. PLC基础知识回顾:- PLC的基本原理与结构- PLC的工作过程与编程方法- 常用PLC指令及其应用2. 机械手搬运原理与控制要求:- 机械手的结构、功能及其分类- 机械手搬运过程中的运动轨迹规划- 机械手搬运过程中的速度调节与控制3. PLC编程与机械手搬运实践:- PLC程序设计方法与步骤- 机械手搬运控制程序编写- 程序调试与优化教学大纲安排:第一课时:PLC基础知识回顾第二课时:机械手搬运原理与控制要求第三课时:PLC编程与机械手搬运实践第四课时:程序调试与优化教材章节及内容:第一章:PLC基础知识1.1 PLC的基本原理与结构1.2 PLC的工作过程与编程方法1.3 常用PLC指令及其应用第二章:机械手搬运原理与控制2.1 机械手的结构、功能及其分类2.2 机械手搬运过程中的运动轨迹规划2.3 机械手搬运过程中的速度调节与控制第三章:PLC编程与机械手搬运实践3.1 PLC程序设计方法与步骤3.2 机械手搬运控制程序编写3.3 程序调试与优化教学内容确保科学性和系统性,结合课程目标,使学生能够掌握PLC与机械手搬运相关知识,为后续的实际应用打下坚实基础。
搬运机械手PLC控制系统课程设计

中北大学课程设计说明书学生姓名:学号:学院:机械与动力工程学院专业:机械电子工程题目:搬运机械手PLC控制系统设计指导教师:赵俊生职称:副教授原霞职称:副教授2013年12月30日中北大学课程设计任务书2013/2014 学年第一学期学院:机械与动力工程学院专业:机械电子工程学生姓名:学号:课程设计题目:搬运机械手 PLC 控制系统设计起迄日期:2013年12月30日~2014年1月10日课程设计地点:瑞学楼指导教师:赵俊生原霞负责人:赵俊生下达任务书日期: 2013年12月30日1.设计目的:培养学生可编程控制器应用能力,同时通过课程设计与实践加深对理论的理解和认识,学会查阅有关专业资料及设计手册。
2.设计内容和要求(包括原始数据、技术参数、条件、设计要求等):某机械手工作示意图如图所示,该机械手是将传送带 A 上的物品搬送到传送带B,为使动作准确,安装了限位开关1ST 到 5ST,分别对机械手进行抓紧、左旋、右旋、上升、下降动作的限位,并给出动作到位信号,机械手的放松由时间控制;光电开关PS 负责检测传送带 A 上的物品是否到位;启动按钮 1SB、停止按钮 2SB用以启动、停止机械手和传送带 A。
传送带 A、B 由电动机拖动,机械手的上下左右抓放动作由液压驱动,并分别由 6 个电磁阀来控制;传送带 B 为连续运转状态,不用 PLC 控制。
试设计 PLC控制系统。
3.设计工作任务及工作量的要求〔包括课程设计计算说明书(论文 )、图纸、实物样品等〕:1.完成 PLC电气控制原理设计(原理图);2.完成现场器件与 PLC内部等效继电器地址编号对照表;3.完成 PLC梯形图;4.完成 PLC指令程序编写;5.完成设计说明书等其它资料。
4.主要参考文献:1.赵俊生 . 电机与电气控制及 PLC(第二版) . 北京:电子工业出版社, 20122.邓星钟 . 机电传动控制 . 武汉:华中科技大学出版社, 20023.袁任光 . 可编程控制器( PLC)应用技术与实例 . 广州:华南理工大学出版社,20014.徐世许 . 可编程序控制器原理、应用、网络 . 合肥:中国科学技术大学出版社,20015.王运霞郝麦顿 . 可编程控制器对双面组合钻床的控制 . 组合机床与自动化加工技术洛阳大学电子工程系, 20035.设计成果形式及要求:课程设计说明书(附程序及相关图表)6.工作计划及进度:2013年 12 月 30日~ 12月31日熟悉题目,查阅相关资料2014年 1月1日 ~ 1 月 3日PLC端口分配图和端口接线图2014年 1月5日 ~1月 7日完成控制系统梯形图及程序设计2014年 1月8日 ~1月 9 日撰写课程设计说明书2014年1月10日答辩负责人审查意见:签字:年月日目录1 搬运机械手的发展及 PLC 的选择..... (1)2 搬运机械手的总体设计........................ . (2)2.1设计内容与要求 (2)2.2控制系统硬件设备配置... .................... . (3)2.2.1电动机控制线路设计... .................... . (3)2.2.2PLC 控制系统设计........................ . (3)2.3控制系统软件设计 (4)2.3.1机械手功能流程图......................... . (4)2.3.2梯形图 .......... ....... (5)2.3.3PLC 指令编写程序........................ . (9)3设计小结........... ....... (10)1 搬运机械手的发展及PLC的选择随着现代工业自动化的普及和发展,搬运机械手的应用也逐渐普及,机械手是一种能模拟人的手臂的部分动作,根据给定的规定动作顺序、轨迹来完成工件抓取和搬运的自动化装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A Context——Aware Access Control Model for Manufacturing Grid LIAO Qi-yao,LI Tso-shen,GE Zhi-hui,LI Lin
(School ofCompute,Electronics and Information,Guangxi University,Nannlng 530004,China)
机械手的控制,可以用单片机来控制,也可以用PLC来控 制。但使用单片机进行控制,需要有相当的研发力量和行业经 验,才能使系统稳定可靠地运行;而用PLC控制,相对简单并 且信号处理时间短,速度快,可靠性高,容易维护。因此,PLC 在机械手的控制领域被越来越广泛的使用。
1 机械手的动作要求和结构设计
1.1 工作背景 生产线上有两个传输线和—个自动装箱机械手。传输带1
停止 ————气t—一 00003
急停 复位
—..—..—..—..—.王.—.一.Z.1.—..——,一一
嘶4
渊
右麓限位传感嚣sl ——————刁。—5————一 ∞∞6
左旋限位传感器鸵 ——————■r‘弋卜—————一 00007
一一—-jF—≈-一一一 竖向下降限位传感嚣s3
00008
㈣9 竖向上升限位传感雒s4 一一一—司广‘5—一一一.
中图分类号:TP241
文献标识码:A
文章编号:1672—545X(2010)03-0058-02
随着科学技术的进步,机械在现实生活中的普遍应用,以 及我国机械自动化的不断提高,机械手已经被广泛应用。机械 手在控制器的控制下,可以模仿人的手、腕、臂的动作,按照固 定的动作流程进行工作。因此,在许多的工业领域可以代替人 的劳动,达到生产自动化。使用机械手,不但降低的人的体力 劳动,减少人力资源的浪费,而且提高了工作效率,为企业带 来更大的经济效益,更有利于企业的发展。
3 结束语
小型搬运机械手可以代替人的体力劳动,减少了人力资 源的浪费,而且提高了工作效率;使用气压系统可靠性高,气 动电路简单,成本低,结构紧凑;使用PLC控制机械手的运动, 灵活性和通用性强,抗干扰能力强,可靠性高,并且本身具备 扩展功能,成本低,适用于工业生产条件,使用效果好。
豳2 工作流程图 机械手的动作分解。从原点开始,按下气动按钮,下降电
authorization蜘i∞ 【4】Pearlman Lt Welch V。Foster I,et a1.A community
for Group collaboration.【EB/OL].http:Hwww.globus.org,alliance/ publieations/papers/CAS-2002一ReUsed.pdf,2002. 【5】姚寒冰,胡和平,卢正鼎,李瑞轩.基于角色和上下文的动态网格访 问控制研究【J】.计算机科学,2006,33(1):4l—44. 【6】蔡红霞,俞涛,方明伦.制造网格中访问控制的研究【刀.计算机集 成制造系统,2007,4(13):716-720.
3结束语
制造网格的特点,决定了其上的网络化CAD系统面临着 复杂的安全管理难题,而RBAC实现了用户与访问权限的逻
辑分离和构造角色之问的层次关系,方便了数据安全管理。为 了在制造网格环境中,充分发挥RBAC在访问控制上的优点, 本文将上下文环境应用到访问控制模型中,提出了一种基于 上下文的动态访问控制模型,用活动封装用户角色和相应的 权限,把上下文分为任务上下文和环境上下文,解决了在动态 的系统环境和任务变化下访问控制的问题。下一步的研究工 作,是把该模型与Globus提供的GSI安全体系和CAS相结 合,实现全局权限整合和本地自治管理。
横向缩回限位传感器耶 ——————刁。‘6————一 咖lO
横向伸出限位传癌器s6 一一一—司尸。≈一一.. 咖ll
一——芍—刁—一一.. 手抓抓羹限位传感嚣s7
001100
手抓橙开限位传感嚣锑 一——墨“。’5.一一
00101
压力传感嚣Bl ——————{广‘1卜————一 001位
一体翻位传感嚣B2 ——————芍。—a————一 0D103
当用户权限初始化完成后,如果用户访问本地CAD服 务。则用户向本地CAD服务提交其用户名和请求权限。本地 CAD服务调用访问控制服务判断包含该用户权限的活动是否 处于就绪状态。如果不是,则禁止用户的访问;如果是,则通过 环境上下文引擎获取主体上下信息,然后通过getLOD函数获 取模型的LOD等级,从而为用户提供不同细节的CAD模型。
——吧24V}一 一一.—{尸‘矗一一一 箱体到位传感嚣的
∞l∞
C伽
本页已使用福昕阅读器进行编辑。 福昕软件(C)2005-2010,版权所有, 仅供试《用装。备制造技术))2mo年第3期
需要8个,共需要13个。 (2)PLC的型号。欧姆龙CPMlA(24输入点,16输出点,
双向晶闸管输出型)。 (3)I/O分配点。 (4)子接线图(如图1所示)。
参考文献: 【I】范玉顺.制造网格的概念与系统体系结构U】.航空制造技术,2005,
(10):42—45. 【2】Foster I,Kesselman C.Tueeke S.The anatomy 0f the grid:enabling
sealable virtual甜学nizadons【J】.International Journal 0f Supercomputer Applications,2001.15(3):200-222. 【3】I.Foster,C.Kesselman,G.Tsudik.S.Tuecke.A security architecture for computational grids[J].Proceedings of the Fifth ACM Conference on Computer and Communications Security.1998,(1 1):83—92.
2机械手的控制设计
2.1 机械手的控制要求 (1)通过机械手实现物品的到位自动检测、搬运、传输等
功能。 (2)功能上分手动和自动两个设计。手动时,由—个按钮
控制(不带锁),第一次按下按钮,机械手复位,然后每次按下 时,机械手执行一步,直到完成所有动作;自动时,由启动、停 止、急停按钮来控制。要求分清停止和急停的功能;停止时,机 械手执行完此次任务后,回到复位状态而停止;急停时,机Байду номын сангаас 手无条件的立即停止,但是注意机械手爪上如有物体,应注意 抓紧防止手爪松动而使物体落下。
万方数据
参考文献: 【l】陈志权.基于PLC气动机械手的控制系统【J】.自动测量与控制
(下转第∞页)
59
Equipment Manufactring Technology No.3,2010
然后,认证服务与网格节点的访问控制服务联系,由访问 控制服务根据任务上下文为用户进行权限激活,从而完成对 用户的权限进行初始化;
(3)要求有指示灯进行功能指示,如:手动,自动指示灯、 启动指示灯、停止指示灯等。
(4)设计计数功能,每抓取—个物件计数器值加一。计数 器显示抓取的总个数。
收稿日期:2009—12—13 作者简介:李雪静(1987一),女,天津人。本科学生,研究方向为机电—体化。
58
万方数据
2。2硬件系统设计
(1)I/0点数的确定。 输入——控制按钮需要6个,限位传感器需要8个,检测
I认证服务 ,j本地c一。服司...f磊祠
服务调用l
■
。
-.-·
t7
l
创建卜 、∑、l任务上下文ll环境上下文引擎lJ
’
Z 7区竺纠垂剜 《一 主体上下文 引擎
.、‘’、p,:=..。E::::=一
Session管理器
网格用户
r两藉盂F
I任多上工塞。jl环境上;;引擎{
L
J NL
‘
,
1/
图4 制造网格访问控制实施框架
手爪是否抓起物体的压力传感器需要1个,检测箱体和阀体
是否到位的光电传感器需要2个。共需要17个输入点;
输出——按钮指示灯需要4个,计数器需要1个,电磁阀
~ 手动自动选择开关 .__.-._-_.__--.__..三,,■
00000
点动 .........罗.一....../一 00001
启动 ................一..T---.-.............一 00002
Equipment Manufactring Technology No.3,2010
本页已使用福昕阅读器进行编辑。 福昕软件(C)2005-2010,版权所有, 仅供试用。
小型搬运机械手结构及PLC控制系统的设计
’
李雪静。杜玉红 (天津工业大学机电学院。天津300160)
摘要:介绍了小型搬运机械手的工作背景和机械机构的设计过程,阐述了PLC对机械手控制的软、硬件设计及PLC的I/O分配点。 并给出了机械手在PLC控制下自动过程的工作漉程图以及自动控制的梯形图。 关键词:机械手;PLC;控制;接线图
是使用来传送阀体的,传输带2是用来传送箱子的。两个生产 线上都有传感器,是用来控制传输线的运动。初始时,机械手 处于复位状态,控制系统检测是否传输带1上已经有一个阀 体停在指定位置,传输带2上已经有一个箱子停在指定位置 上。首先,机械手将传输带I上的阀体移到传输带2的箱子里, 同时传输带1将另—个阀体传送到指定位置后停止移动,接着 机械手将传输带1上的阀体移到箱子里,同时传输带l又将一 个新阀体传送到指定位置后停止,接着机械手将阀体移到箱子 里,直到箱子装满了,传输带2运动,把装满阀体的箱子移走, 送来一个空箱子,待第二个箱子到达指定位置后,传输带2停 止运动,与此同时传输带1也将一个阀体送到位后停止,待两 个传输带都停止后,机械手又开始新的装箱工作。 1.2工作要求