EV3 乐高搭建图 RAC3 TRUCK
合集下载
乐高ev3初级课程课件角力小车
设计简洁而稳固的车身结构,以便在角力 比赛中保持稳定。
在搭建过程中,注意使用合适的搭建技巧, 如使用交叉堆叠、避免过长的悬臂等,以 确保车身结构的稳固。
保持车身重心低,以提高稳定性。
选择合适的积木搭建车身,确保车身轻便 且能承受撞击。
考虑车轮大小和位置,确保小车能够顺畅 地前进和后退。
电机及传感器安装与调试
接后的相关设置。
电机与传感器原理及应用
电机原理
讲解电机的工作原理,包括直流 电机和交流电机的区别和特点。
电机应用
介绍电机在角力小车中的应用, 包括驱动车轮、控制速度和方向 等。
传感器原理
阐述传感器的工作原理,包括光 电传感器、触碰传感器和超声波 传感器的原理和特点。
传感器应用
说明传感器在角力小车中的应用, 如检测距离、识别颜色和形状等。
3
激发学员们对进一步学习EV3机器人的兴趣和热 情
拓展延伸:高级课程预告
01
高级课程知识点预览
02
复杂机器人结构设计与搭建
03
高级编程技巧与算法应用
拓展延伸:高级课程预告
01
多机器人协同控制与通信
02
学习建议与展望
03
04
建议学员们继续深入学习EV3 机器人相关知识
鼓励学员们参加各类机器人比 赛和项目实践,提升自己的综
03
学员作品展示与评价
学员作品展示
01
02
展示学员们搭建的角力小车作品
分享学员们在搭建和编程过程中的经验和 心得
03
04
作品评价
根据角力小车的结构稳定性、创新性、实 用性等方面进行评价
05
06
鼓励学员们互相交流、学习和进步
在搭建过程中,注意使用合适的搭建技巧, 如使用交叉堆叠、避免过长的悬臂等,以 确保车身结构的稳固。
保持车身重心低,以提高稳定性。
选择合适的积木搭建车身,确保车身轻便 且能承受撞击。
考虑车轮大小和位置,确保小车能够顺畅 地前进和后退。
电机及传感器安装与调试
接后的相关设置。
电机与传感器原理及应用
电机原理
讲解电机的工作原理,包括直流 电机和交流电机的区别和特点。
电机应用
介绍电机在角力小车中的应用, 包括驱动车轮、控制速度和方向 等。
传感器原理
阐述传感器的工作原理,包括光 电传感器、触碰传感器和超声波 传感器的原理和特点。
传感器应用
说明传感器在角力小车中的应用, 如检测距离、识别颜色和形状等。
3
激发学员们对进一步学习EV3机器人的兴趣和热 情
拓展延伸:高级课程预告
01
高级课程知识点预览
02
复杂机器人结构设计与搭建
03
高级编程技巧与算法应用
拓展延伸:高级课程预告
01
多机器人协同控制与通信
02
学习建议与展望
03
04
建议学员们继续深入学习EV3 机器人相关知识
鼓励学员们参加各类机器人比 赛和项目实践,提升自己的综
03
学员作品展示与评价
学员作品展示
01
02
展示学员们搭建的角力小车作品
分享学员们在搭建和编程过程中的经验和 心得
03
04
作品评价
根据角力小车的结构稳定性、创新性、实 用性等方面进行评价
05
06
鼓励学员们互相交流、学习和进步
乐高EV3高级课程课件

条件语句
if语句、switch语句等, 根据条件执行不同代码
块
循环语句
for循环、while循环等 ,重复执行某段代码直
到满足条件
中断与跳出
break语句、continue 语句等,用于控制循环
流程
嵌套结构
条件语句和循环语句可 以相互嵌套,实现更复
杂的程序逻辑
04
机器人设计与搭建实例
Chapter
人形机器人
利用乐高EV3套件搭建一款仿人形的机器人。通过 编程控制机器人的动作,实现行走、跳舞、打拳等 功能。同时,可以为人形机器人添加语音识别、图 像识别等功能,提高其智能化水平。
05
传感器应用与编程实践
Chapter
超声波传感器应用
超声波测距
利用超声波传感器测量物体与机 器人之间的距离,实现避障、跟
调试技巧
使用模拟器、单步执行、查看变量值 等
编程流程
拖拽模块、设置参数、连接模块、上 传程序等
变量、数据类型与运算
变量定义
命名规则、数据类型、作用域等
01
02
运算符
03
算术运算符、比较运算符、逻辑 运算符等
04
数据类型
数字、字符串、布尔值、数组等
表达式
组合运算符和变量形成表达式, 计算结果
条件判断与循环控制
多机器人协作
多机器人协作将成为未来机器人领域的重要研究方向,通过多个机 器人的协同工作,可以完成更复杂的任务和挑战。
机器人与人类互动
未来的机器人将更加注重与人类的互动和沟通,通过自然语言处理、 情感计算等技术,实现更加自然和友好的人机交互体验。
THANKS
感谢观看
学生作品展示及评价标准
EV3机器人-旋转木马附搭建图和程序

旋转木马的结构原理
起起落落——曲柄连杆机构
旋转——绕轴运动
04 程序编写
编程演示
三档位运行程序
活动设置 比一比谁的旋转木马档位控制更加准确
结构原理
旋 转 木 马
各种旋转木马:
旋转木马的起源
旋转木马或回转木马是游乐场机 动游戏的一种,即旋转大平台上 有装饰成木马且上下移动的座位 供游客乘坐。最早记录的旋转木 马出现于拜占庭帝国时期。约 1860年欧洲出现第一个以蒸汽推 动的旋转木马。如今在各大小游 戏场、商场等地方皆有各式旋转 木马。
感谢伟大的瓦特先生, 世界上从此有了蒸汽机。 旋转木马也开始更新换 代,用蒸汽机做心脏。 蒸汽机轰隆隆吐出白气 弥漫四周,于是彩色的 木马也仿似在云端雾气 中穿行。真是华丽的一 幕呀!
起起落落 旋转
曲柄连杆机构 绕轴运动
乐高EV3初级课程皮筋小车课件
PART4
课后练习
• 重新搭建皮筋小车模型 • 发挥创造力优化皮筋小车模型增强小车动力
课后练习
重新搭建皮筋小车模型 发挥创造力优化皮筋小车模型,增强小车动力
谢谢观看
授课:雨衡老师
乐高EV3初级课 程 皮筋小车
2021年09月
Contents
目录
01
课程知识点
02
搭建皮筋小车
03
赛车比赛
04
课后练习
1 PART
课程知识点
• 什么是弹力
• 弹力产生的条件
• 弹力的三要素
什么是弹力
弹力
物体由于发生弹性形变而产生的力叫做弹 力。如我们在压尺子、拉橡皮筋、拉弹簧 时,感受到它们对手有力的作用,这种力 就是弹力。
弹力的三要素
① 大小:与物体的弹性强弱和形变程度有关。对一个物体来说,在弹性限 度内,物体的弹性形变越大,其产生的弹力也越大。
② 方向:与物体的弹性形变方向相反。
③
压力方向:跟受力面垂直,且指向受力物体内部。
④
拉力方向:沿着绳子指向绳子收缩的方向。
⑤
支持力方向:跟受力物体外表垂直,且指向受力物体。
弹力是我们生活中常见的一种力,我们常 说的压力、支持力、拉力等都是弹力。
弹力产生的条件
① 两物体直接接触。 ② 物体发生了弹性形变。 二者缺一不可。弹力是接触力,物体间不接触不会产生弹力,但相互接触的 物体间不一定产生弹力,如相互接触但没有发生弹性形变的物体间一定不会 产生弹力。 有弹力必有形变;有形变不一定有弹力,只有弹性形变才会产生弹力。
安装轮胎 24
安装轮胎 25
安装轮胎 26
模型完成 27
PART3
EV3参数
大型伺服电机
EV3大型伺服电机内置角度传感器,可以精确到1度的控制,当机器人运行时,可以校准速度。电机上的孔结构更容易固定和安装,每个马达内置一个角度传感器,这使你能准确的控制马达转动。测速反馈精度:160 - 170 RPM;运行扭矩约30 oz *in,失速转矩约60oz*in,自动ID识别功能。
编号
名称
器材
简介
图片
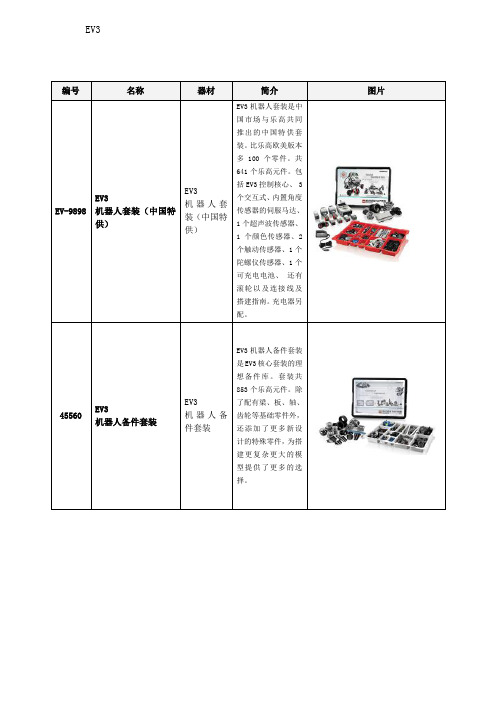
EV-9898
EV3
机器人套装(中国特供)
EV3
机器人套装(中国特供)
EV3机器人套装是中国市场与乐高共同推出的中国特供套装。比乐高欧美版本多100个零件。共641个乐高元件。包括EV3控制核心、3个交互式、内置角度传感器的伺服马达、1个超声波传感器、1个颜色传感器、2个触动传感器、1个陀螺仪传感器、1个可充电电池、还有滚轮以及连接线及搭建指南。充电器另配。
分类盒是用于器材分类的盒子。可将梁、板、轴、齿轮等放入不同的分类格当中。起到便于器材管理,方便取用的作用。
微型电脑
EV3微型电脑配置ARM 9处理器,LINUX系统,16MB闪存,64MBRAM,迷你SD-32G内存,高速USB传输,USB主设备,蓝牙、无线支持,4个出口-4个入口,改善的喇叭,3色6按键界面,高清黑白屏幕,高达每秒1000的采样率,可连接苹果和安卓系统。
锂电池
EV3的专用锂电池,10V,2050mAh,兼容原有乐高A/C变压器,充电时间更短,一次充电时间:3-4小时(0到全满)。代替6节标准的AA电池,满足EV3的工作需要。同NXT的锂电池一样,可使用相同的充电器(8887)给予充电。
导线
导线是主机的输入、输出端口与输入设备(传感器)、输出设备(马达、灯)相连接的连接线。
超声波传感器
超声波传感器可以测量距离,范围在0-255cm之间,精度更高,检测误差+/-1cm,能识别物体,通过检测距离能识别物体的运动。自动ID识别功能。
EV3大型伺服电机内置角度传感器,可以精确到1度的控制,当机器人运行时,可以校准速度。电机上的孔结构更容易固定和安装,每个马达内置一个角度传感器,这使你能准确的控制马达转动。测速反馈精度:160 - 170 RPM;运行扭矩约30 oz *in,失速转矩约60oz*in,自动ID识别功能。
编号
名称
器材
简介
图片
EV-9898
EV3
机器人套装(中国特供)
EV3
机器人套装(中国特供)
EV3机器人套装是中国市场与乐高共同推出的中国特供套装。比乐高欧美版本多100个零件。共641个乐高元件。包括EV3控制核心、3个交互式、内置角度传感器的伺服马达、1个超声波传感器、1个颜色传感器、2个触动传感器、1个陀螺仪传感器、1个可充电电池、还有滚轮以及连接线及搭建指南。充电器另配。
分类盒是用于器材分类的盒子。可将梁、板、轴、齿轮等放入不同的分类格当中。起到便于器材管理,方便取用的作用。
微型电脑
EV3微型电脑配置ARM 9处理器,LINUX系统,16MB闪存,64MBRAM,迷你SD-32G内存,高速USB传输,USB主设备,蓝牙、无线支持,4个出口-4个入口,改善的喇叭,3色6按键界面,高清黑白屏幕,高达每秒1000的采样率,可连接苹果和安卓系统。
锂电池
EV3的专用锂电池,10V,2050mAh,兼容原有乐高A/C变压器,充电时间更短,一次充电时间:3-4小时(0到全满)。代替6节标准的AA电池,满足EV3的工作需要。同NXT的锂电池一样,可使用相同的充电器(8887)给予充电。
导线
导线是主机的输入、输出端口与输入设备(传感器)、输出设备(马达、灯)相连接的连接线。
超声波传感器
超声波传感器可以测量距离,范围在0-255cm之间,精度更高,检测误差+/-1cm,能识别物体,通过检测距离能识别物体的运动。自动ID识别功能。
乐高EV3初级课程课件 - 角力小车
“钩强”或“牵钩”出现在春秋战国时期的楚国。楚国在训练水军时,是 用薄竹片劈成细条做成的“篾缆”代替长钩,将士分成两队,各执篾缆的 一端进行对拉,互相较力。后来,楚国的这项水军训练项目,逐渐普及到 民间,广为流传。
唐、宋民间都有拔河活动,元代以后,拔河活动开始衰落。到清朝末年, 西方的拔河运动传入中国,此后,中国古代的拔河形式逐渐消失。
拔河运动的发展
作为一项简单易行的团体运动,拔河在1912年至1920年曾贵为奥运项目。 在举行过的5届奥运拔河赛中,丹麦瑞典联队、美国队、英国队、瑞典队 和英国队先后夺冠。 1920年比利时安特卫普奥运会后,拔河就被排除出了奥运会。 2002年,国际拔河联盟正式加入国际奥委会,这些年来一直以拔河回归奥 运作为努力的目标。 2015年12月,韩国、越南、柬埔寨、菲律宾一起申请的拔河成功被列入 非物质文化遗产名录。
PART2
搭建角力小车
• 搭建车体
• 搭建控制器
• 连接车体和控制器
搭建车体 01
搭建车体 02
搭建车体 03
搭建车体 04
搭建车体 05
搭建车体 06
搭建车体 07
搭建车体 08
搭建车体 09
搭建车体 10
搭建车体 11
搭建车体 12
搭建车体 13
搭建车体 14
搭建车体 15
搭建车体 16
搭建车体 17
搭建车体 18
搭建车体 19
搭建控制器 20
搭建控制器 21
搭建控制器 22
搭建控制器 23
搭建控制器 24
搭建控制器 25
搭建控制器 26
搭建控制器 27
连接车体和控制器 28
连接车体和控制器 29
连接车体和控制器 30
唐、宋民间都有拔河活动,元代以后,拔河活动开始衰落。到清朝末年, 西方的拔河运动传入中国,此后,中国古代的拔河形式逐渐消失。
拔河运动的发展
作为一项简单易行的团体运动,拔河在1912年至1920年曾贵为奥运项目。 在举行过的5届奥运拔河赛中,丹麦瑞典联队、美国队、英国队、瑞典队 和英国队先后夺冠。 1920年比利时安特卫普奥运会后,拔河就被排除出了奥运会。 2002年,国际拔河联盟正式加入国际奥委会,这些年来一直以拔河回归奥 运作为努力的目标。 2015年12月,韩国、越南、柬埔寨、菲律宾一起申请的拔河成功被列入 非物质文化遗产名录。
PART2
搭建角力小车
• 搭建车体
• 搭建控制器
• 连接车体和控制器
搭建车体 01
搭建车体 02
搭建车体 03
搭建车体 04
搭建车体 05
搭建车体 06
搭建车体 07
搭建车体 08
搭建车体 09
搭建车体 10
搭建车体 11
搭建车体 12
搭建车体 13
搭建车体 14
搭建车体 15
搭建车体 16
搭建车体 17
搭建车体 18
搭建车体 19
搭建控制器 20
搭建控制器 21
搭建控制器 22
搭建控制器 23
搭建控制器 24
搭建控制器 25
搭建控制器 26
搭建控制器 27
连接车体和控制器 28
连接车体和控制器 29
连接车体和控制器 30
EV3简易运输车EV3

方法二:2、一个电机工具、一个 等待工具、一个电机工具、一个等 待工具······;
如何是好?
如图:机器人 在来回运送的 过程中会按顺 序重复不断的 执行开动、等 待下车、掉头、 开动、掉头、 等待上车六种 动作!
循环工具
使循环内的程序命令按 顺序重复不断的执行
制作
接下来就请同学们在上节课简 易机器人小车的基础上,设计加装一 个车厢,来接送同学们吧!
简易运输车
————智能小司机
简易运输车
上次课我们刚学习了让机器人动 起来,马上任务就来了,迪瓦机器人 科技中心迎来了很多新的学员,可是 他们的爸爸妈妈每天都很忙,没有时 间送他们来学习,很多家长和学员都 很苦恼。那么今天我们就来帮他们解 决这个问题,我们来制作一个自动驾 驶的迪瓦校车,来接送迪瓦学员!
循环
上节课我们了解了电机控制的 时候有圈数、角度、时间几种方式, 那么请问大家如果我们想让电机旋 转一定时间后等待1s,然后再旋转 同样的一段时间,然后再等待1s, 如此每旋转一段时间就等待1s这样 反复的运行下去该怎么办呢?
方法一:程序编写电机旋转3圈, 等待1s,然后每次等程序结束后重 新打开程序;
比赛
看谁能在规定时间内接送更多的同学 注意:运输过程中如全部驱动轮行驶 出边线,则比赛结束!
总结
循环工具的作用是什么?
顺使 重多 复个 执程 行序
安
下节课我们做什么呢?
再
同一平面的齿轮传动
见
如何是好?
如图:机器人 在来回运送的 过程中会按顺 序重复不断的 执行开动、等 待下车、掉头、 开动、掉头、 等待上车六种 动作!
循环工具
使循环内的程序命令按 顺序重复不断的执行
制作
接下来就请同学们在上节课简 易机器人小车的基础上,设计加装一 个车厢,来接送同学们吧!
简易运输车
————智能小司机
简易运输车
上次课我们刚学习了让机器人动 起来,马上任务就来了,迪瓦机器人 科技中心迎来了很多新的学员,可是 他们的爸爸妈妈每天都很忙,没有时 间送他们来学习,很多家长和学员都 很苦恼。那么今天我们就来帮他们解 决这个问题,我们来制作一个自动驾 驶的迪瓦校车,来接送迪瓦学员!
循环
上节课我们了解了电机控制的 时候有圈数、角度、时间几种方式, 那么请问大家如果我们想让电机旋 转一定时间后等待1s,然后再旋转 同样的一段时间,然后再等待1s, 如此每旋转一段时间就等待1s这样 反复的运行下去该怎么办呢?
方法一:程序编写电机旋转3圈, 等待1s,然后每次等程序结束后重 新打开程序;
比赛
看谁能在规定时间内接送更多的同学 注意:运输过程中如全部驱动轮行驶 出边线,则比赛结束!
总结
循环工具的作用是什么?
顺使 重多 复个 执程 行序
安
下节课我们做什么呢?
再
同一平面的齿轮传动
见
EV3简易运输车EV3
(展开活动中,需要注意的问题,包括搭建、课堂纪律等等)
参考资料
(引起动机里面引用的实际案例)
注意事项
1.在动机引导的过程中,如果孩子回答不出,可以加以提示或者以图画书中的情节作引导
2.讨论时,不要偏离主题
3.在操作时,如有孩子不想参与,就不必勉强他。但一定要观察其行为表现,一旦孩子开始操作就可以鼓励他参与进来
2、一个电机工具、一个等待工具、一个电机工具、一个等待工具······;
以上两种方法虽然可行,但是却非常麻烦,要么需要不断的按程序开关,要么就得编写一条很长很长很长的程序。
那么有没有简单一点儿的办法呢?请大家观察一下,我们编写的这么长的程序当中,是不是电机工具和等待工具,这两个命令是按顺序重复不断的出现的呢?那么我们只要告诉机器人你只要重复不断的按顺序执行这两个程序命令就可以了!这样我们就用到了循环工具。
3-1.3 简易运输车
教学名称
简易运输车
教学目标
1、学习循环的概念;
2、制作简易运输车;
3、逻辑思路分析练习。
教学用具
EV3、大型电机2个、零件若干
(助教要配合主教课前需要准备的上课需要东西)
教学过程
一、课程引入(5分钟):
上次课我们刚学习了让机器人动起来,马上任务就来了,迪瓦机器人科技中心迎来了很多新的学员,可是他们的爸爸妈妈每天都很忙,没有时间送他们来学习,很多家长和学员都很苦恼。那么今天我们就来帮他们解决这个问题,我们来制作一个自动驾驶的迪瓦校车,来接送迪瓦学员!
四、游戏比赛(20分钟)
1、给简易运输车设计一个车厢(5分钟);
2、设置两个站点一个为迪瓦机器人科技中心,一个为家;
3、两人一组配合,一人在家帮助“学员”上车(将“学员”放入车厢),一
参考资料
(引起动机里面引用的实际案例)
注意事项
1.在动机引导的过程中,如果孩子回答不出,可以加以提示或者以图画书中的情节作引导
2.讨论时,不要偏离主题
3.在操作时,如有孩子不想参与,就不必勉强他。但一定要观察其行为表现,一旦孩子开始操作就可以鼓励他参与进来
2、一个电机工具、一个等待工具、一个电机工具、一个等待工具······;
以上两种方法虽然可行,但是却非常麻烦,要么需要不断的按程序开关,要么就得编写一条很长很长很长的程序。
那么有没有简单一点儿的办法呢?请大家观察一下,我们编写的这么长的程序当中,是不是电机工具和等待工具,这两个命令是按顺序重复不断的出现的呢?那么我们只要告诉机器人你只要重复不断的按顺序执行这两个程序命令就可以了!这样我们就用到了循环工具。
3-1.3 简易运输车
教学名称
简易运输车
教学目标
1、学习循环的概念;
2、制作简易运输车;
3、逻辑思路分析练习。
教学用具
EV3、大型电机2个、零件若干
(助教要配合主教课前需要准备的上课需要东西)
教学过程
一、课程引入(5分钟):
上次课我们刚学习了让机器人动起来,马上任务就来了,迪瓦机器人科技中心迎来了很多新的学员,可是他们的爸爸妈妈每天都很忙,没有时间送他们来学习,很多家长和学员都很苦恼。那么今天我们就来帮他们解决这个问题,我们来制作一个自动驾驶的迪瓦校车,来接送迪瓦学员!
四、游戏比赛(20分钟)
1、给简易运输车设计一个车厢(5分钟);
2、设置两个站点一个为迪瓦机器人科技中心,一个为家;
3、两人一组配合,一人在家帮助“学员”上车(将“学员”放入车厢),一