wdt
简述wdt手机锁屏拨测流程

简述wdt手机锁屏拨测流程
WDT手机锁屏拨测流程是通过技术团队发送的拨测锁屏脚本来检测每个手机网络的链接状况。
具体流程是:
首先,技术团队向所有手机发送拨测锁屏脚本,根据运营商及其他组件发送给用户。
其次,脚本触发手机上的连接状态,并请求网络地址,同时检查响应,以确定手机锁屏脚本是否成功发送。
第三,当手机锁屏脚本发送成功时,服务器就会收到一条短信,把服务器的
IP地址和其他信息一起发送到它。
第四,技术团队又会利用手机锁屏脚本取得手机的GPS位置,以确定手机的物理位置。
最后,手机锁屏脚本将运行的结果发回到技术团队,作为一个锁屏性能报告,以为技术团队进行分析和优化以便做出最佳设计。
以上就是WDT手机锁屏拨测流程,它不仅能够反映手机在路由器或WIFI网络信号强度方面的网络性能,而且可以获得比较加权的网络性能评估,从而有效地改善服务体验。
wdt-2系列多点温湿度测试仪软件使用说明书
WDT-2系列多点温湿度测试仪一、概述“WDT-2系列多点温湿度测试仪”是无锡市计量科学研究所根据国家校准规范《JJF 1101-2003环境试验设备温度、湿度校准规范》开发研制的新型智能测试仪器。
本仪器能自动巡回测试与记录各种湿、热设备的温湿场的分布和变化,可用于对诸如恒温恒湿箱,恒温培养箱,恒温水浴锅,高低温试验箱,老化试验箱,干燥箱,水泥养护箱,冰箱,冷藏库,压力蒸汽锅,箱式电阻炉等温湿度设备的温湿度参数的检定和校准。
“WDT-2系列多点温湿度测试仪”由于采用了国际最先进的CPU和24位运放芯片,运用比例测量技术,配以精密的恒流源、高精度低温飘的标准电阻,从而保证了该仪器的高精确性和高稳定性。
本仪器采用四线制Pt100铂电阻或热电偶作为温度传感器,并自动识别传感器类型,测湿元件为进口数字温湿度一体传感器。
内置大容量存储器可循环存储1500组测试记录(约50台次);内嵌式微型打印机可实时打印测试结果;可脱机或联机使用。
因此,本仪器精度高、功能齐全、测量范围广、自动化程度高、反应迅速、显示清晰。
本仪器可以单独使用,也可以与配有我所编制的《多点温湿度检测系统软件》的计算机配套使用。
该软件为我所自主开发,符合JJF1101-2003、GB9452-88、JB/T5502-91等检定规范,并充分考虑了测试人员实际操作的方便性与实用性,可以同时进行多台设备的温湿度检测,具有界面简洁、操作简单、设置灵活、结果直观、分析详尽、运行稳定、数据库独立可靠等优点。
该仪器将为工农业生产及计量检修等行业提供先进而可靠的现代化测试、分析和管理的手段。
二、主要技术指标1.测量范围:PT100 (-100~400)℃;热电偶(0~1600)℃;相对湿度(0~100%)RH2.测量准确度:±0.05%F.S±1LSB (PT100传感器);热电偶根据分度号而定;相对湿度(30%~90%)≤±1.5%RH,其余≤±3%RH。
GPIO和WTD功能测试规范
研祥智能科技股份有限公司测试规范MTD-CS-124 A0GPIO和WDT功能测试规范(共 6 页)起草:张宁 2009.6.23审核:卢栋才 2009.6.23批准:卫海龙 2009.6.23研祥智能科技股份有限公司技术管理本部发布QR-STA-017 版本:A0目次前言 (I)修订履历 (II)1范围 (1)2规范性引用文件 (1)3术语和定义 (1)4要求 (1)4.1GPIO要求 (1)4.2WDT要求 (1)5试验方法 (1)5.1试验环境条件 (1)5.2GPIO测试方法 (1)5.3WDT测试方法 (2)前言本规范由研祥智能科技股份有限公司技术管理本部中试部提出并归口管理。
本规范起草部门:中试部本规范起草人:张宁本规范审核人:卢栋才本规范批准人:卫海龙修订履历版本变更内容变更理由修订人/日期A0 新制无张宁2009.6.3GPIO和WDT功能测试规范1范围本规范适用于GPIO、WDT功能的验证测试,是公司板卡、整机等系列产品上GPIO接口功能和WDT 功能评定的依据。
2规范性引用文件无3术语和定义3.1GPIO 通用可编程输入输出口 General Purpose Input Output输出可用于获取传感器状态、高低电平、低速信号等功能。
备注:目前公司使用的可提供GPIO接口的有南桥芯片,SuperIO芯片,基于SMBUS总线的PCA9534芯片。
3.2WDT Watch Dog Timer是一个定时器电路,计时器超时事件响应。
能在程序在设定的时间产生中断或系统复位。
备注:目前公司使用的可提供WDT功能的有南桥芯片,SuperIO芯片。
4要求4.1GPIO要求GPIO输出pin脚能编程输出高/低电平,输入pin脚能正常侦测输出脚的电平。
4.2WDT要求WDT功能激活后,能准时发出复位或中断信号,导致系统复位或相应中断服务程序的执行。
5试验方法5.1试验环境条件工作温度:15℃-35℃相对温度:45%-75%大气压力:86kPa-106kPa5.2GPIO测试方法a)将GPIO接口定义中信号的输入与输出按说明书定义短接。
WDT系列可编程调速器在水电站应用实例
叵 ] 坷
:
网 鹰 餐 S
图
() b p
测 单 颁元 谓器 节 电 随系 液 动统
1 主配 壳 体 ;2 主配 衬 套 ;3 双联 滤 油 器: 4 , - , ,紧 急 停 机 电磁 阀 ;5 主配 。 活塞;6 .引导阀;7 ,引导阀村套 .开关机时间调整螺母;9 8 ,电液比例 阀:l .手 自动切换阀;1,主接力器;l,手动操作阀;1 ,位移传感器 O 1 2 3
应 用 技 术
-■ I
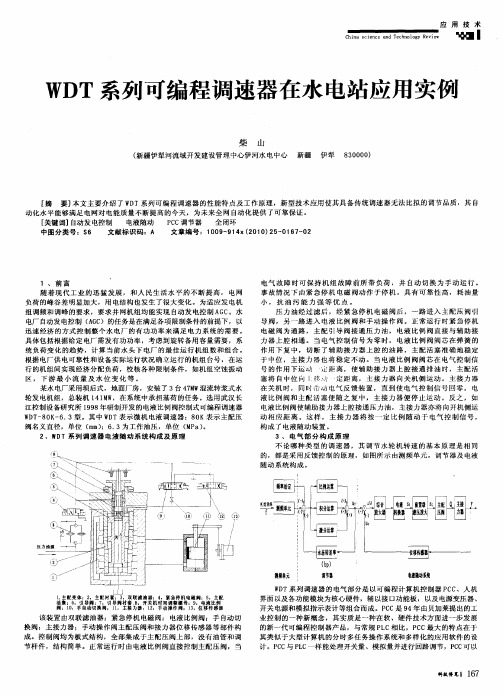
WD T系列 可编程调 速器( 新疆伊犁河流域开发 建设管理 中心伊河 水电中心 新疆 伊犁
[ 摘 要] 本文主 要介绍 了 W T系 列可编程 调速器 的性 能特 点及工 作原理 ,新型 技术应用 使其具 备传统调速 器无 法比拟 的调节品质 ,其 自 D 动化水平 能够满足 电网对 电能质 量不断提 高的今天 ,为未来 全 网 自动化提供 了可靠保证 。 [ 关键词]自动 发电控制 电液随动 P C调节 器 全 闭环 C 中图分类号 :s 6 文献 标识码:A 文 章编号:1 0 — 1 x(01 ) 5 0 7 0 9 9 2 2 — 1 — 2 0 4 0 6
该装置 由双联 滤油器 ;紧 急停机 电磁阀 ;电液比例阀 ;手 自动切 换 阀;主接 力器;手动操 作阀主配压 阀和接力器位 移传感器等 部件构 成 。控制 阀均为板式结构 ,全部集成 于主配压 阀上 部 ,没有 油管和调 节杆件 ,结构简单 。正 常运行时 由电液 比例 阀直接 控制主配压 阀, 当
电气 故 障时 可保 持 机组 故 障前 所 带负 荷 ,并 自动 切换 为 手动 运行 。 事故 情况 下 由紧急停 机 电磁 阀动 作于停 机 。具有 可靠 性 高,耗 油量 小,抗油污能力强等优点 。 压力 油经过 滤后 ,经 紧 急停机 电磁 阀后 ,一 路进 入主 配压 阀引 导阀 ,另 一路进 入 电液 比例 阀和手 动操 作 阀。正 常运 行时紧 急停 机 电磁 阀为通 路 ,主配 引导 阀接 通压 力油 , 电液 比例 阀直接 与辅助 接 力器上 腔相 通 。当 电气控 制信 号 为零 时, 电液 比例 阀阀芯在 弹簧 的 作用 下复 中,切 断 了辅助 接力 器上腔 的油路 ,主 配活 塞准确 地稳 定 于中位 ,主 接力 器也 将稳 定不动 。当 电液 比例阀 阀芯在 电气 控制 信 号 的 作 用 下 运 动 定 距 离 , 使 辅 助 接 力 器 上 腔 接 通 排 油 时 , 主 配 活 塞 将 自中位 向 1穆 定 距离 ,主 接力 器 向关机侧 运 动 。主 接力 器 . 在 关机 时 ,同叫 带动 电气 反馈装 置 ,直 到使 电气控 制信 号回 零 ,电 液 比例 阀和 主配 活塞 便随 之复 中 ,主 接 力器便 停 止运动 。反 之 ,如 电液 比例 阀使辅 助接力器 上腔接通压 力油 ,主接 力器亦将 向开机侧 运 动 相应 距 离 。这样 ,主接 力器 将 按一 定 比例 随 动于 电气控 制信 号 , 构 成 了 电 液 随动 装 置 。 3、 电气部 分 构成 原理 不 论 哪 种 类 型 的 调 速 器 ,其 调 节 水 轮 机 转 速 的 基 本 原 理 是 相 同 的 ,都 是 采 用 反 馈 控 制 的 原 理 , 如 图 所 示 由 测 频 单 元 , 调 节 器 及 电液 随动 系统构成 。
内部与外部看门狗定时器的比较

内部与外部看门狗定时器的比较摘要:本文对内部(集成在处理器内部)看门狗定时器(WTD)与外部(基于硬件) WDT的优势和劣势进行了对比。
内部看门狗便于设计,但容易失效。
MAXQ2000微控制器的WDT可以作为内部看门狗的一个例子。
基于硬件的看门狗定时器需要占用额外的电路板空间,但在对于可靠性要求较高的设计中确实不可或缺的。
本文给出了一个对照表,总结了每种WDT方案的优缺点。
引言看门狗定时器(WDT)在出现无效的软件运行状态时用来强行复位(硬件复位)嵌入式微处理器或微控制器,失效状态可以是简单地触发寄存器的某一位,或者是射线干扰或EMI (电磁辐射)。
本文介绍了一些针对具体应用选择最佳定时器的考虑。
WDT的典型应用防止微处理器闭锁是WDT的一个典型应用,通常,嵌入式软件有一个“主循环”程序,用其调用子程序以实现不同的任务。
每次程序循环对WDT进行一次复位,如果任何原因造成程序循环操作失败,看门狗定时器则发生超时,对器件进行复位。
具有WDT功能的系统非常适合检测误码,中断(包括存储器故障,EMI对存储器或接口放电)可能导致临时性的误码。
这些误码会导致处理器输入、输出数据的极性翻转,当误码没引入到程序信息中时,微处理器将会执行错误的代码。
很有可能造成处理器开始执行操作数,而非操作代码。
程序开始执行这种错误代码时,将造成程序运行不正常,无法提供看门狗清零信号,从而导致处理器复位。
合理的系统设计能够在复位后恢复系统的正常运行。
需要注意的是,WDT不能检测瞬态故障,按照定义,只有在WDT计数器达到预定的时间间隔时才会复位处理器。
正是这一原因,需要选择一个最短超时周期,以便在系统失控之前由WDT产生复位,使系统恢复正常工作。
内部和外部WDTWDT可以内置于微处理器,例如:MAXQ2000微控制器;也可以是一个独立的IC (外部WDT),或作为支持ASIC的一部分。
无论是内部WDT,还是外部WDT,各有其优缺点。
XMC4000中文参考手册-第09章 窗口看门狗定时器(WDT)

9.8.1
初始化和启动操作
系统复位后,需要完成WDT模块的初始化。 • 检查最后一次系统复位的原因,以确定电源状态 - 读出SCU_RSTSTAT.RSTSTAT寄存器位段,确定最后一次系统复位的原因 - 依据最后系统复位的原因执行适当的操作 看门狗软件初始化序列 用SCU_CLKSET.WDTCEN寄存器位段启用WDT时钟 用SCU_PRCLR2.WDTRS寄存器位段释放WDT复位 用WDT_WLB寄存器设置窗口下限 用WDT_WUB寄存器设置窗口上限 配置外部看门狗服务指示(可选,请参阅SCU/HCU章节) 用SCU_WDTCLKCR寄存器选择和启用WDT输入时钟 用SCU_NMIREQEN寄存器在系统级上启用系统陷阱预警报警(可选,仅用在WDT预警 模式) 软件启动序列 - 选择模式(超时或预警)和用WDT_CTR寄存器启用WDT模块 服务看门狗 - 在WDT_TIM寄存器中,对编程时间窗口检查当前定时器值 - 在有效时间窗内,写魔字到WDT_SRV寄存器 9.8.2 重新配置和重新启动操作 - - - - - - -
参考手册 WDT, V2.3
9-3
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
窗口看门狗定时器(WDT)
图 9-2
无预警复位
图 9-2中描绘的示例场景展示了在有效时间窗口内WDT模块成功服务后产生的两个连续的服务 脉冲。对于没有服务执行的情况,在计数器的值已经超过窗口上限值后立即触发在wdt_rst_req 输出上的复位请求生成。 9.3 预警模式
在预警模式时,溢出事件的作用在有和没有启用预警是不同的。当预警启用时,计数器第一次 超过上限时触发输出报警信号wdt_alarm。只能在下一个溢出产生复位请求。报警状态通过寄 存器WDTSTS指示且通过寄存器WDTCLR清除。清除报警状态将使WDT回到正常状态。报警 信号发送请求到SCU,在那里上报到NMI。
“WDT-Ⅲ型电力系统综合自动化实验台”的应用

“WDT—III型 电 力 系统 综 合 自动 化 实验 台 ”由 发 电机 组 、双 回路输 电线 路及 模 型 、无 穷大 电源等
收 稿 日期 :2011—07—22;修 改 日期 :2011—09—08 作者简介 :牛祖蘅 (1977一),女 ,硕士 、讲 师 ,主要 从 事
摘 要 :三峡 大 学 于 2006年 开设 了《电 力 系统 综 合 自动 化 实验 》,该 实验 是 与 电 气工 程 专 业 的《电 力 系统 分 析 》、《电 力 系统 自 动化》、《微型机继 电保护原理》等课 程相配套的 实验教 学。 实验装置采 用的是 “WDT—III型电力 系统综合 自动化 实验 台”和 “PS一5G型 电 力 系统 微 机 监 控 试 验 台 ”。在 使 用 装 置 的 5年 中,针 对 最 容 易 出 现 的 问题 进 行 了分 析 ,对 于 在 实验 的 过 程 中 遇 到的 实验现 象,教 师应引导和培养学生 自主地分析 、解决 问题 。同时还提 出了实验教 学的学时安排 建议 。 关 键 词 :电 力 系统 综 合 自动 化 实验 ;WDT—lII型 电 力 系统 综 合 自动 化 实 验 台 ;PS一5G 型 电 力 系 统 微 机 监 控 试 验 台 ; 实验 教 学 中 图 分 类 号 :TP319,TP391.7 文 献 标 志码 :A doi:10.3969/j.issn.1672—4550.2012.03.006
三峡 大学 电力 系统综 合 自动化 实验 室采 用 的是 “WDT—III型 电 力 系统 综 合 自动 化 实验 台 ”,该 试 验 台是 1个 多功 能 实验平 台 ,可 以根据 需要 灵活 开 设很 多涵 盖专业 领 域 的实验 。 目前 结合 我校 教学 情 况 ,在该 装置 共 开设 实 验 5个 :准 同期 并 列 实 验 、 同步 发 电机微机 励磁 实验 、单 机对 无穷 大 系统稳 态 运行 方式 实 验 、电 力 系 统 功 率 特 性 和 功 率 极 限 实 验 、电力 系统暂 态稳 定性 实验 和 电力 系统调 度 自动 化实验 ,其 中电力 系统调 度 自动化 实验 是在 建立 在 WDT一Ⅲ型 电力 系统 综 合 实 验 平 台 的 基 础 之 上 的 PS一5G型 电力 系统微 机监 控试 验系 统上 开设
WDT是英语Watchdog Timer的缩写字母
WDT是英语Watchdog Timer的缩写字母。
Watchdog Timer 中文名看门狗。
是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一段时间输出一个信号到喂狗端,给WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,使MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。
所以在使用有看门狗的芯片时要注意清看门狗。
硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。
那么定时时间到后就会使单片机复位。
常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等. 软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。
我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。
对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。
在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。
而T1的中断正常与否我们再由T0定时中断子程序来监视。
6_看门狗定时器

在正常工作期间,一次看门狗定时时间将产生一次系统复位。如果通过编程使
看门狗定时时间稍大于程序中主循环执行一遍所用的时间,并且程序执行过程 中都有对看门狗定时器清零的指令,使计数值重新计数,程序正常运行时,就 会在看门狗定时时间到达之前对看门狗清零,不会产生看门狗溢出。如果由于 干扰使程序跑飞,则不会在看门狗定时时间到达之前执行看门狗清零指令,看 门狗就会产生溢出,从而产生系统复位,使CPU重新运行用户程序,这样程序就 又可以恢复正常运行。
定时时间/ms tsmclk *32768 tsmclk *8192 tsmclk *512 tsmclk *64
1 1
1 1
0 0
1 1
0 1
0 1
1000 250
15.63 1.95
taclk *32768 taclk *8192
taclk *512 taclk *64
看门狗定时器(WDT)
中断控制位
在应用中应根据需要选择合适的定时器模块。MSP430单片机的定时器模块功 能如下: ① 看门狗定时器:基本定时,当程序发生错误时执行一个受控的系统重启动 ② 定时器A:基本定时,支持软件和各种外围模块工作在低频、低功耗条件下 ③ 定时器B:基本定时,功能基本同定时器A,但比定时器A灵活,功能更强大
④ 实时时钟:基本定时,日历功能
#include <msp430f149.h> void main(void) { WDTCTL = WDT_ADLY_1000; // 定时周期设为1000ms IE1 |=WDTIE; // 使能WDT中断 P1DIR |= BIT0; // 将P1.0设为输出 _ _bis_SR_register(LPM0_bits + GIE);// 进入LPM0并使能全局中断 } //看门狗定时器中断服务程序 #pragma vector=WDT_VECTOR _ _interrupt void watchdog_timer(void) { P1OUT ^= BIT0; // 反转P1.0端口状态 }
Watch Dog Timer (WDT) 功能使用说明

Application Note
Watch Dog Timer (WDT)功能使用說明(使用內部 250KHz)
適用產品:SM59264、SM59128、SM8954A、SM8958A、SM89516A、SM894051、SM79108、 SM79164、SM59D03/04G2
100
101
110
111
溢位週期 2.048ms 4.096ms 8.192ms 16.384ms 32.768ms 65.536ms 131.072ms 262.144ms
型號: SM8954A、SM8958A、SM89516A
PS【2:0】:WDT 計數溢位週期選擇
PS【2:0】 000
001
010
b3:
MOV 21H,#0ffh
b2:
CALL clearWDT
;呼叫 clearWDT 副程式
MOV 22H,#0ffh
b1:
DJNZ 22H,b1
DJNZ 21H,b2
DJNZ 20H,b3
RET ;******************* 設定 WDTC 的 Clear Bit *******************************
Application Note
此 WDT Key 暫存器(WDTKEY,$ 8F)為控制 WDT 控制暫存器 (WDTC,$ 8E)之設定及保護。 當對 WDT Key 暫存器 (WDTKEY,$ 8F)先後寫入 1EH 及 E1H 時(須依此順序先後寫入),始可對 WDT 控制暫存器 (WDTC,$ 8E)設定。 當對 WDT Key 暫存器 (WDTKEY,$ 8F)先後寫入 E1H 及 1EH 時(須依此順序先後寫入),則 WDT 控制暫存器 (WDTC,$ 8E)已被保護,無法修改。
SAM3U中文手册(17-看门狗定时器 WDT)
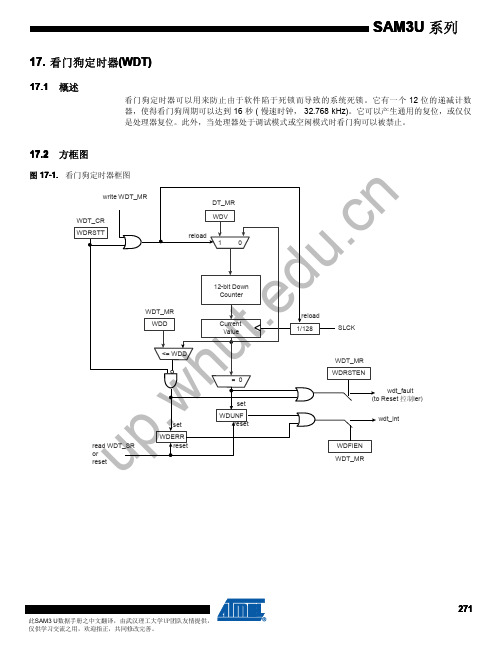
SAM3U系列看门狗定时器(WDT)锁而导致的系统死锁。
它有一个12位的递减计数器,使得看门狗周期可以达到16秒(慢速时钟,32.768kHz)。
它可以产生通用的复位,或仅仅是处理器复位。
此外,当处理器处于调试模式或空闲模式时看门狗可以被禁止。
17-1.看门狗定时器框图faultReset控制ler)reset17.3看门狗定时器可以用来防止由于软件陷于死锁而导致的系统死锁。
其电源是VDDCORE。
处理器复位后,看门狗从初始值重新开始启动。
看门狗基于一个12位的递减计数器,其加载值通过模式寄存器WDT_MR中的WDV域来定义。
使用将慢速时钟128分频的信号来驱动看门狗定时器,这样看门狗周期最大值能达到16秒(慢速时钟的典型值为32.768kHz)。
处理器复位之后,WDV的值为0xFFF,对应于计数器的最大值,并且允许外部复位(备份复位时WDRSTEN为1)。
也就是说,默认情况下,复位之后看门狗就开始运行,例如上电后。
如果用户程序没有使用看门狗,则必须禁止它(对WDT_MR寄存器中的WDDIS位置位);否则必须定期进行“喂狗”,以满足看门狗要求。
看门狗模式寄存器(WDT_MR)只能写一次。
只有处理器复位才可以复位它。
对WDT_MR执行写操作,会将最新的编程模式参数重新加载到定时器中。
在普通的操作中,用户需要通过对控制寄存器(WDT_CR)中WDRSTT位置来位定期重载看门狗计数器,以防止定时器向下溢出。
对WDRSTT位进行置位后,计数器的值将立即从WDT_MR寄存器中重新加载,并重新启动;慢速时钟128分频器也被复位及重新启动。
WDT_CR寄存器是写保护的。
因此,如果预设值不正确,对WDT_CR的写操作是没有作用的。
如果发生了计数器向下溢出,且模式寄存器(WDT_MR)的WDRSTEN为1,则连接到复位控制器的“wdt_fault”信号生效,看门狗状态寄存器(WDT_SR)的位WDUNF也被设置为1。
WDT-II综合台使用说明书

概述WDT-Ⅲ型电力系统综合自动化试验台,是为了适应现代化电力系统对宽口径“复合型”高级技术人才的需要而研制的电力类专业新型教学试验系统。
此系统除用于试验教学以外,另可用于本、专科生的课程设计试验,也可作为研究生、科研人员的产品开发试验,还可作为电力系统技术人员的培训基地。
试验装置“一次系统原理接线图”见附录一。
综合自动化实验教学系统由发电机组、试验操作台、无穷大系统等三大部分组成(如图1所示)。
图1 WDT-Ⅲ型电力系统综合自动化试验装置现场图1.发电机组它是由同在一个轴上的三相同步发电机(S N=2.5kV A,V N=400V,n N=1500r.p.m),模拟原动机用的直流电动机(P N=2.2kW,V N=220V)以及测速装置和功率角指示器组成。
直流电动机、同步发电机经弹性联轴器对轴联结后组装在一个活动底盘上构成可移动式机组。
具有结构紧凑、占地少、移动轻便等优点,机组的活动底盘有四个螺旋式支脚和三个橡皮轮,将支脚旋下即可开机实验。
2.试验操作台实验操作台是由输电线路单元、微机线路保护单元、功率调节和同期单元、仪表测量和短路故障模拟单元等组成。
其中负荷调节和同期单元是由“TGS-04型微机调速装置”、“WL-04B微机磁励调节器”、“HGWT-03微机准同期控制器”等微机型的自动装置和其相对应的手动装置组成。
(1)输电线路采用双回路远距离输电线路模型,每回线路分成两段,并设置中间开关站,使发电机与系统之间可构成四种不同联络阻抗,便于实验分析比较。
(2)“YHB-Ⅲ型微机线路保护”装置是专为实验教学设计,具有过流选相跳闸、自动重合闸功能,备有事故记录功能,有利于实验分析。
在实验中可以观测到线路重合闸对系统暂态稳定性影响以及非全相运行状况。
(3)“TGS-04型微机调速装置”是针对大、中专院校教学和科研而设计的,能做到最大限度地满足教学科研灵活多变的需要。
具有测量发电机转速、测量电网频率、测量系统功角、手动模拟调节、手动数字调节、微机自动调速以及过速保护等功能。
WDT

/* WDT is clocked by fACLK (32KHz) 即WDTSSEL=1,选用ACLK为时钟源 */
//WDTCTL = WDT_ARST_1000; // 1000ms
//WDTCTL = WDT_ARST_250; // 250ms
//WDTCTL = WDT_MRST_8; // ~8ms
//WDTCTL = WDT_MRST_0_5; // ~0.5ms
//WDTCTL = WDT_MRST_0_064; // ~0.064ms
看门狗模式 :自动复位时间 可选定;
要使用该库函数,需要将本文件(WDT.c)添加进工程,并在
需要调用显示函数的文件开头处包含"WDT.h"
本函数是针对"看门狗定时器"所写的,以下是针对所有关于msp430g2553单片机
//WDTCTL = WDT_MDLY_8; // ~8ms
//WDTCTL = WDT_MDLY_0_5; // ~0.5ms
//WDTCTL = WDT_MDLY_0_064; // ~0.064ms
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
/* WDT is clocked by fSMCLK (1MHz),即WDTSSEL=0,选用SMCLK为时钟源*/
//WDTCTL = WDT_MRST_32; // ~32ms interval (default)
WDTCTL = WDT_ADLY_16; // 16ms
//WDTCTL = WDT_ADLY_1_9; // 1.9ms
IE1 |= WDTIE; // 使能寄存器IE1中相应的WDT中断位
WDTIIIC电力系统综合自动化试验平台性能指标

WDT- ⅢC 型电力系统综合自动化试验平台性能指标1.设备的主要用途、功能及特点电力系统综合自动化试验台是一个自动化程度很高的多功能试验平台,它由发机电组、双回路输电路线及模型、无穷大电源等一次设备组成,通过中间开关站与单回、双回路线的组合,可构成发机电与无穷大系统之间有四种不同联络阻抗,供系统实验分析比较时使用。
每台原动机都配有微机自动调速装置与手动调速装置,并且有微机过速保护功能,每台发机电配有微机自动准同期装置与手动同期装置,输电路线还配微机过流保护与重合闸装置。
每套自动装置都有三种控制方式供选择,并且微机励磁的运行方式与运行参数可在线修改。
综合试验台具有各种微机自动装置与手动控制装置,便于学生进行比较实验。
电力系统综合自动化试验台是一个自动化程度很高的多功能试验平台。
有如下特点:系统由发机电组、输电路线单元、微机保护单元、负荷调节与同期单元、短路摹拟单元等组成,并能与电力系统微机监控实验系统相联,可扩展为 7+ 1 系统;系统结构紧凑、占地面积小、安装调试与检修方便快捷;模型参数可以调节,可摹拟不同参数的输电路线;实验系统安全可靠、操作方便灵便、物理现象直观,并有正规出版社的配套教材;综合试验台具有各种微机自动装置与手动控制装置,便于学生进行比较实验。
2.系统完成的教学实验打印报表,实现遥测、遥信、遥控、遥调等电力系统调度自动化功能,能完成下述实验:发机电启动与调整实验;(1)电力系统运行方式实验;(2)负荷调整实验。
(3)手动准同期并列实验;(4)半自动准同期并列实验;(5)全自动准同期并列实验;(6)各种信号波形观测。
(7)同控制角( )的励磁电压波形观测实验;(8)同步发机电起励实验;(9)控制方式及其相互切换实验;(10)逆变灭磁与跳灭磁开关灭磁实验;(11)伏赫限制实验;(12)第 2 页同步发机电强励实验;(13)欠励限制实验;(14)调差特性实验;(15)过励限制实验;(16)PSS 实验。
WDT安装指南
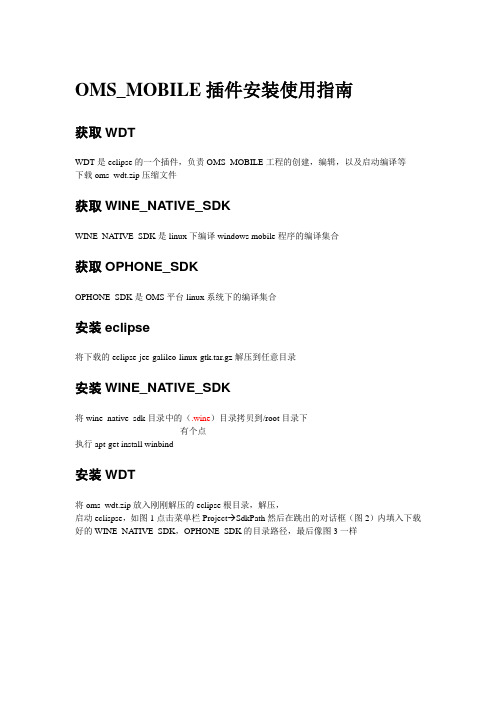
OMS_MOBILE插件安装使用指南
获取WDT
WDT是eclipse的一个插件,负责OMS_MOBILE工程的创建,编辑,以及启动编译等
下载oms_wdt.zip压缩文件
获取WINE_NATIVE_SDK
WINE_NATIVE_SDK是linux下编译windows mobile程序的编译集合
获取OPHONE_SDK
OPHONE_SDK是OMS平台linux系统下的编译集合
安装eclipse
将下载的eclipse-jee-galileo-linux-gtk.tar.gz解压到任意目录
安装WINE_NATIVE_SDK
将wine_native_sdk目录中的(.wine)目录拷贝到/root目录下
有个点
执行apt-get install winbind
安装WDT
将oms_wdt.zip放入刚刚解压的eclipse根目录,解压,
启动eclispse,如图1点击菜单栏Project SdkPath然后在跳出的对话框(图2)内填入下载好的WINE_NATIVE_SDK,OPHONE_SDK的目录路径,最后像图3一样
图1
图2
图3 点击ok后,WDT就安装完成了
使用WDT
创建Ophone Mobile工程
按照以下截图便可以创建一个Ophone Mobile工程
点击Finsih完成工程创建
编译工程
在工程名称上右键点击,选择Build就可以编译工程。
14-LPC111x_看门狗定时器(WDT)

u p .wh ut.ed u.c nUM10398第14章:LPC111x看门狗定时器(WDT)ReRev v.00.10—11J a nuary2020110U s er manual 1.如何阅读本章所有LPC111x系列处理器的WDT模块完全一致。
2.特性•如果没有周期性重装计数值(即喂狗),则产生片内复位。
•支持调试模式。
•可通过软件允许看门狗,但禁止看门狗需要硬件复位或看门狗复位/中断。
•如果看门狗被允许,不正确/不完整的喂狗时序会产生复位/中断。
•具有看门狗复位的标志。
•可编程的32位定时器(带有内部预分频器)。
•时钟周期可选,从(T WDCLK×256×4)到(T WDCLK×232×4),取(T WDCLK×4)的倍数。
•可在系统控制块中选择内部RC振荡器(IRC)、主时钟或看门狗振荡器,来做为看门狗的时钟(WDCLK)源,见表3–23。
这样,看门狗定时器在不同功耗条件下,有多种可能计时选择。
为增加可靠性,还提供了一个看门狗定时器专用的完整内部时钟源,它不依赖于外部晶振及其相关元件和线路。
3.应用看门狗的目的是为了使微控制器在程序运行进入错误状态时,使系统在一个合理的时间内复位。
当看门狗被允许之后,如果用户程序没有在预定的时间内进行“喂狗”(或重新装载计数值),看门狗将复位系统。
4.描述看门狗定时器包括一个固定的4分频器和1个32位计数器,时钟通过4分频器送给送定时器。
每到一个时钟,定时器计数值减1。
开始递减的值,最小必须是0xFF;如果设定小于0xFF的值,则默认将0xFF装载到计数器。
因此,看门狗最小时间是(TWDCLK×256×4),最大时间是(TWDCLK×232×4),取(TWDCLK×4)的倍数。
看门狗必须按如下方法使用:1.在WDTC寄存器中设定看门狗定时器重装载值。
浅谈如何利用WDT技术提高计算机系统可靠性
河北 秦皇岛 0 6 0 ) 6 2 0
摘 要 : 文讨 论 了计 算 机 系统 出现 死机 的 原 因 , 本 并介 绍 内 、 外看 门狗 电路 的原 理 以厦 用 看 门狗 电路 克服 死机 、 复 系统 正 常 运 行 的 方 法 。 恢
关键词 : 计算机; 看门狗电路 ; 死机 ; 复位
维普资讯
科技信息
0计算机 与信息技术0
S IN E IF MA I N期 1
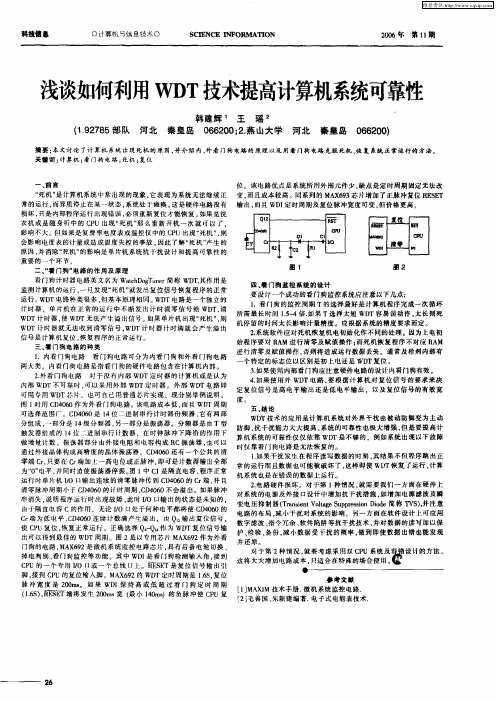
浅谈如何利用WD T技术提高计算机系统可靠性
(_ 7 5 1 2 8 部队 9
韩 建辉 ’ 王 瑶 河北 秦皇岛 0 6 0 ;. 6 2 0 2燕山大学
一
、
原因 , 消除“ 并 死机 ” 影 响是 单 片机 系统 抗 干扰 设 计 和 提 高 可靠 性 的 的 重 要 的 一 个 环 节 二 、看 门 狗” “ 电路 的 作用 及 原 理
凸 4
I I R , 】 o
圈 1
圈2
看门狗计时器 电路英 文名为 WacD g i r简称 WD , th oTme T其作用是 四 、 门 狗 监控 系 统 的 设 计 看 监测计算机的运行 , 黾发现“ 一 死机” 就发出复位信 号恢复程序的正常 要设 计一个成功 的看 门狗监控 系统应注意 以下几点: 运行 。 T电路种类很多 , WD 但基本原理相同。 T电路是一个独立的 WD 1 看 门狗的监控周期 T的选择最好是计算机程序完成一次循 环 . 计时器 ,单 片机在正常 的运行 中不 断发出计 时清零信 号给 WD 清 T. 所 需最长时 问 1 — . 4倍- 5 如果 T选择 太短 WD T容易误动作 . 太长则死 WDT计时器 . WD 使 T无法产生溢出信号。 如果单片机 出现“ 死机” 则 . 机停 留的时间太 长影响计 量精 度。应根据 系统 的精度要求而定。 WD 汁 时 器 就 无 法 收 到 清 零 信 号 . T计 时 器 计 时 满 就 会 产 生 溢 出 T WD 2系统 软件应对死机恢 复机 电初始化作不 同的处理 因为上电初 、 信号是计算机复位 , 复程序的『 常运 行。 恢 E 始程 序要对 R M进行清零及 赋值操 作; A 而死机恢复程序不对应 R M A 三 、 门 狗 电 路 的 种 类 看 进行 清零 及赋值操作 . 否则将 造成 运行数据丢失 。通 常及栓剂内部有 1 .内看门狗电路 看门狗 电路可分为内看门狗和外看 门狗电路 个特定的标志位以区别是初上电还是 WD T复位 。 两大类。内看门狗 电路是指 看门狗的硬件 电路包 含在计算机 内部 。 3如果使用内部看门狗应注意硬件 电路的设计 内看门狗有效 。 . 2外看门狗电路 对 于没有 内部 WD . T定 时器的计算机或是认为 4如果使用外 WD . T电路 , 要根 据计算机 对复位信 号的要求 米决 内 部 WD T不 可 靠 时 + 以 采 用 外 部 WD 可 T定 时 器 。 外 部 WD T电 路 即 定 复位信号是高 电平输 出还 是低电平输 出,以及复位信 号的有效宽 可 用 专 用 WD T芯 片 .也 可 自 己用 普 通 芯 片 实 现 。 现 分 别 举 例 说 明 。 度。 图 1时用 C 4 6 为 外看 门 狗 电路 。该 电路 成 本 低 . D 0 0作 而且 WD T周 期 五 、 论 结 可选择范围广。C 4 6 D 0 0是 1 二进制串行计 时器份频器 . 4位 它有两部 WD T技术 的应用是计算机 系统对外界 干扰 由被动防御变为 主动 分组成 , 一部分是 l 4级分 频器 . 另一部分是振 荡器 。分频 器是 由T型 防御 , 抗千扰能力大大提高 。 系统的可靠性也极大增 强 , 但是要提高计 触发器组成的 1 4位 二进 制串行计数器,在时钟脉 冲下降沿的作用下 算 机系统的可靠性 仅仅依靠 WD T是 不够 的。例如系统 出现 以下故障 做增键计数 。振荡器部分 由外接电阻和 电容构 成 R C振 荡器 , 可以 也 时仪靠看门狗电路是无法恢复的 。 通过外接晶体构成高精度的晶体振荡器。C 4 6 D 0 0还有一个公共 的清 1如果 干扰发 生在程序读写数据 的时刻 。 , 其结果不但程序跳 出正 零端 C , r只要在 c 端加上 一高电位或 正脉 冲. f 即可是计数器输 出全部 常的运行而且数 据也可能被破坏了 , 这样 即使 WD T恢 复了运行 , 计算 为 … 电平 , 0’ 并同时迫使振荡器停振。 1中 C1 图 是隔直 电容 , 程序正常 机系统也是在错误的数据上运行 。 运行时单片机 I 口输出连续的清零脉 冲传到 CM0 0的 C 端 . / O I 6 r 并且 2电路硬件损坏 。对于第 1 , 种情况 。 就需要 我们一方面在硬件 上 清零脉冲周期小于 C 4 6 D 0 0的计时周期 。D 0 0不 会溢 出。如果脉 冲 C 46 对系统的电源及外接 口设计中增加抗干扰措施 , 如增加 电源滤波及瞬 串消失 。 明程 序运行 时出现故障 , 说 此时 I / O口输 出的状态是未知的 , 变电压抑制 器( r s n V l g u pe i i e 称 T S , Ta i t o ae p r s nDo 简 ne t S so d V) 并注意 由于隔直电容 C的作用 。无论 I 口处于何种 电平都将使 C 4 6 / O D 0 0的 电路的布局 . 减小干扰对系统 的影响 。另一方面在软件设计 上可 应用 c 端 为 低 电 平 , D 0 0连 续 计 数 满产 溢 出 ,由 Q。输 出 复 位 信 号 , r C46 : 数字滤波 、 指令冗余 、 软件陷阱等抗干扰技术 , 并对数据的读写加 以保 使 C U复位 . P 恢复正常运行 。正确 选择 Q 一 I 为 WD Q 作 T复位信号输 护、 检验 、 备份 , 减小数据受 干扰的概 率 , 到即使数据 出错也能发现 做 出可 以得到最佳的 WD T周期 。图 2是 以专用芯片 MA 6 2作 为外看 X9 并 还 原 门狗的电路 , X 9 MA 6 2是微机系统监控 电路芯 片 , 具有后备电池 切换 、 对于第 2种情 况 . 就要考虑采用双 C U系统及 设 计 的方 法 。 P 掉 电判别 、 门狗监控等功 能。其 中 WD 是看 门狗检测输入 角. 看 1 接到 这将大大增加电路成本 , 只适合在特殊的场合使用 。 C U 的一 个 专 用 I 口或 一 个 总 线 口上 。R S T是 复位 信 号 输 出 引 P / O EE 脚 。 到 C U 的 复位 输 入 脚 。MA 6 2的 WD 接 P X9 T定时 周 期是 1 S 复位 .. 6 参 考 文 献 脉 冲宽 度 是 2 0 。 如 果 WDI 持 高 或低 超 过 看 门狗 定 时周 期 0 ms 保 [ ] XI 技术手册. 1MA M 微机 系统监控 电路 ( . )R S T端 将 发 生 2 on 1 S ,E E 6 0I s宽 f 小 10 )的 负 脉 冲 使 C U复 最 4 ms P [] 2 毛善 国、 朱新建编著. 电子式电能表技 术
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1) 初始化:
a. 把使用到的引脚GPH2、GPH3定义为TXD0、RXD0:
GPHCON |= 0xa0; //GPH2,GPH3 set as TXD0,RXD0
GPHUP = 0x0c; //GPH2,GPH3内部上拉
b.ULCON0 ( UART channel 0 line control register ):设为0x03
可以计算得UBRDIV0 = 27,请使用S3C2410数据手册第314页的误差公式验算一下此波特率是否在可容忍的误差范围之内,如果不在,则需要更换另一个波特率(本实验使用的115200是符合的)。
2) 发送数据:
a.UTRSTAT0 ( UART channel 0 Tx/Rx status register ):
波特率发生器使用的时钟可以为PCLK(默认)或者UEXTCLK(主要是为了达到更高的波特率,默认使用PCLK最高为230.4k bps)。发送器和接受器分别包括一个16-byte的FIFO以及一个数据移位器(data shifter)。数据通过发送引脚(TxDn)和接收引脚(RxDn)进行发送和接收。
位[2]:无数据发送时,自动设为1。当我们要使用串口发送数据时,先读此位以判断是否有数据正在占用发送口。
位[1]:发送FIFO是否为空,本实验未用此位
位[0]:接收缓冲区是否有数据,若有,此位设为1。本实验中,需要不断查询此位一判断是否有数据已经被接收。
b.UTXH0 (UART channel 0 transmit buffer register ):
本实验不使用流控,设为默认值0
f.UBRDIV0 ( R/W Baud rate divisior register 0 ):设为27
UBRDIV0 = 27; //波特率为115200
本实验使用PLL,PCLK=50MHz,设置波特率为115200,则由公式
UBRDIVn = (int)(PCLK / (bps x 16) ) -1
上一页 1 2 下一页
2. s3c2410串口实验
实验代码很简单,非常适合串口编程入门。
内容为:通过串口打印出一行信息提示用户输入一个字符。若用户输入’e’即退出程序。若输入其他字符则重复尝试。
下面具体分析:(部分内容引用自《S3C2410完全开发流程》,这里感谢其作者的贡献)
UART的寄存器有11X3个(3个UART)之多,我们选最简单的方法来进行本实验,用到用于接收、发送数据。如此一来,操作UART倒也不复杂。本板使用UART0:
接收数据时,接收引脚(RxDn)按一定波特率通过UART接口模块进行数据接收进来存放在Receive Shifter然后再移入Receive Buffer。对程序员来讲即通过Receive Holding Register读取接收到的数据(类似发送,不管是否使用FIFO Mode都是读该寄存器获取接收到的数据)。
此值含义为:8个数据位,1个停止位,无校验,正常操作模式。
c.UCON0 (UART channel 0 control register ):设为0x05
除了位[3:0],其他位都使用默认值。位[3:0]=0b0101表示:发送、接收都使用“中断或查询方式”--本实验使用查询查询方式。
Transmit Holding Register和Receive Holding Register都是8 bit大小的寄存器,即每次可读写一个字节数据。
3) 波特率的计算
波特率时钟主要是用来提供串口数据发送和接收时所需要的时钟信号。
计算方法为源时钟(默认为PCLK)除以16以及一个16位分频因子(divisor)。分频因子的值存储在baudrate divisor register (UBRDIVn)内,由用户指定。
uart_init(); //初始化串口
close_watchdog();
uart_send("uart communication success!\r\n");
while(1)
{
uart_send("If you want to quit ,please pess 'e'\r\n");
GPHCON |= 0xa0; //GPH2,GPH3 set as TXD0,RXD0
GPHUP = 0x0c; //GPH2,GPH3内部上拉
}
void uart_send(char * c)
{
for (; *c != '\0'; c++)
4) 实验源代码
/* main.c */
#include "uart.h"
#include "clock.h"
#include "watchdog.h"
int Main(void)
{
char key = ' ';
clock_init(); //初始化时钟
key = uart_get();
if (key == 'e')
{
uart_send ("you pressed 'e' and you'll quit!\r\n");
break;
}
else
{
uart_send("you pressed ");
{
while(!(UTRSTAT0 & TXD0READY)) ; //不断查询,直到可以发送数据
UTXH0 = *c ; //发送数据
}
}
unsigned char uart_get(void)
{
发送数据时,CPU通过内部总线将要发送的数据写入Transmit buffer,对程序员来讲即将数据写入Transmit Holding RegiSTer(若使用FIFO Mode也是写入这个寄存器,硬件内部会自动判断)。然后Transmitter按照Buad-rate Generator产生的波特率将Transmit Buffer内的数据移入Transmit Shifter, 最后通过TXDn引脚发送出去。
在没有引入UART之前,由于没有OS,我们写程序烧到开发板内执行后,并不能在程序的运行过程中打印一些提示信息告诉我们程序究竟运行了如何或者提供接口让用户去控制程序的运行路径,最后也只能通过物理现象去判断程序是否执行成功。
使用串口我们便可以实现开发板最基本的数据的发送和接收,实现同开发板的交互,控制程序的运行,并且在程序运行中打印出一些信息进行debug。实际上bootloader和kernel的控制台(nfs模式)都是通过uart实现的。由此我们可以发现uart在实际开发中是非常重要的。
while(!(UTRSTAT0 & RXD0READY)) ; //不断查询,直到接收到了数据
return URXH0; //返回接收到的数据
该文章来至网络或用户,仅供学习交流之用,版权归原作者所有。
如有侵权,请及时与我们联系!
1. s3c2410串口基础
S3C2410A UART详细的规格说明请参考S3c2410的datasheet。
1) S3C2410的uart默认使用的系统时钟是PCLK。
这和计算uart的波特率有关。
2) UART的功能模块及数据传输流程
每一个uart都包含一个波特率发生器(Baudrate Generator),发送器(Transmitter),接收器(Receiver)以及一个控制逻辑(Control Unit)。
把要发送的数据写入此寄存器。
3) 接收数据:
a.UTRSTAT0:如上描述,我们用到位[0]
b.URXH0 (UART channel 0 receive buffer register ):
当查询到UTRSTAT0 位[0]=1时,读此寄存器获得串口接收到的数据。
{
ULCON0 = 0x03; //8N1
UCON0 = 0x005; //中断或查询方式
UFCON0 = 0x00; //不使用FIFO
UMCON0 = 0x00; //不使用流控
UBRDIV0 = 27; //波特率为115200
uart_send(&key);
uart_send(",retry!\r\n");
}
}
uart_send("the program exited by user!\r\n");
return 0;
}
下面是串口相关部分源码:
void uart_init(void)
通常我们计算波特率的方法为根据想要的波特率反过来计算divisor, 然后将该值写入Divisor Register(UBRDIVn)寄存器内。公式如下:
UBRDIVn = (int)(PCLK/(bps x 16) ) -1
Bps为我们需要设置的波特率,比如115200。
d.UFCON0 (UART channel 0 FIFO control register ):设为0x00
每个UART内部都有一个16字节的发送FIFO和接收FIFO,但是本实验不使用FIFO,设为默认值0
e.UMCON0 (UART channel 0 Modem control register ):设为0x00