【CN209966265U】一种仿生式擦窗机器人【专利】
一种擦窗机器人[发明专利]
![一种擦窗机器人[发明专利]](https://img.taocdn.com/s3/m/bb0268040975f46526d3e17a.png)
专利名称:一种擦窗机器人
专利类型:发明专利
发明人:欧阳满玉,刘凯,李友余,张严林申请号:CN201910422748.3
申请日:20190521
公开号:CN110151046A
公开日:
20190823
专利内容由知识产权出版社提供
摘要:本发明涉及一种擦窗机器人,包括:第一擦窗器,设有第一吸附机构和第一移动机构;第一连接件,第一擦窗器背向吸附机构的吸附面的一面与第一连接件之间设有第一伸缩机构,第一伸缩机构使第一擦窗器相对于第一连接件伸缩移动,使第一擦窗器贴近或远离第一吸附机构的吸附面;第二擦窗器,设有第二吸附机构和第二移动机构;第二连接件,第二擦窗器背向第二吸附机构的吸附面的一面与第二连接件之间设有第二伸缩机构,第二伸缩机构使第二擦窗其相对于第二连接件伸缩移动,使第二擦窗器贴近或远离第二吸附机构的吸附面;第三伸缩机构,设置在第一连接件和第二连接件之间,使第一连接件相对于第二连接件伸缩移动。
本发明的擦窗机器人可以跨越障碍物。
申请人:广州晒帝智能科技有限公司
地址:510000 广东省广州市天河区大灵山路18号裕景工业园9栋18楼
国籍:CN
代理机构:深圳市道勤知酷知识产权代理事务所(普通合伙)
更多信息请下载全文后查看。
一种自动擦玻璃工具[实用新型专利]
![一种自动擦玻璃工具[实用新型专利]](https://img.taocdn.com/s3/m/c3339286b84ae45c3a358c08.png)
专利名称:一种自动擦玻璃工具
专利类型:实用新型专利
发明人:孟凡召,谭德宁,郑明辉,吕静,陈福德,万志远申请号:CN201921879006.5
申请日:20191104
公开号:CN211559909U
公开日:
20200925
专利内容由知识产权出版社提供
摘要:一种自动擦玻璃工具,解决了现在磁力擦玻璃工具由于操作者擦洗移动速度不稳或突然加快导致室外工具吸力不足而坠落的问题,其包括室内工具和室外工具,所述室内工具包括内壳体,内壳体前面设有麦克纳姆轮,内壳体前端面上固定有第一清洁条,第一清洁条的下端设有第一刮水条,第一刮水条与内壳体固定连接,内壳体内设有前后滑动的磁铁块;所述室外工具包括外壳体,外壳体内固定有永磁铁,外壳体前端面上固定有第二清洁条,第二清洁条下端设有第二刮水条,第二刮水条与外壳体固定连接。
申请人:山东华宇工学院
地址:253034 山东省德州市德城区大学东路968号
国籍:CN
代理机构:德州沃杰知识产权代理事务所(普通合伙)
代理人:程成
更多信息请下载全文后查看。
我国自主研发首款擦窗机器人面世 获多项专利

我国自主研发首款擦窗机器人面世获多项专利
我国首款具有完全自主知识产权的擦窗机器人——科沃斯窗宝,日前在上海亮相。
该款机器人能智能规划擦窗路线,自动擦拭,擦拭2平方米以内的窗户大约需要6分钟,有效解决了家庭高空“擦窗难〞。
窗宝机器人在窗户的内外分为主动机和从动机两局部。
在擦拭窗的整个运行过程中,主动机和从动机之间靠磁场的吸力吸附并运行。
窗宝可以智能地判断磁场吸力的大小,并提醒使用者调节吸力。
窗宝的4个轮子也是4个传感器,使用者把窗宝放在玻璃上并开启,4个轮子传感器就感应到压力的大小,吸力足够时亮蓝灯,如果吸力不够就亮红灯,确保使用平安。
它首先从边角开始,然后沿Z字形规划擦拭,最后回到起点。
窗宝的问世标志着科沃斯机器人系列实现由地面向立体空间的成功延伸。
据介绍,科沃斯是IEC-TC59〔国际电工联合会〕机器人吸尘器标准工作组唯一中国委员,参与家居效劳机器人国际标准的研讨和制定。
2019年,被国家标准委员会任命为家庭效劳机器人标准化工作组组长单位,牵头开展家庭效劳机器人国家标准的制定工作。
今年9月,在波兰举行的家居效劳机器人博览会上,科沃斯的产品获得“最具创新技术产品奖〞。
窗宝在长达12年打造机器人技术平台根底上已形成批量生产的创新成果,累计获专利47项,其中创造专利19项。
1 / 1。
【CN209966264U】一种具有风干功能的擦窗机器人【专利】
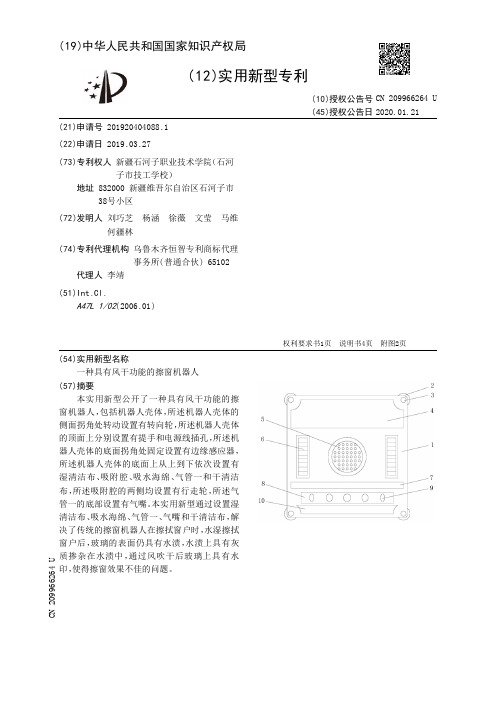
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920404088.1(22)申请日 2019.03.27(73)专利权人 新疆石河子职业技术学院(石河子市技工学校)地址 832000 新疆维吾尔自治区石河子市38号小区(72)发明人 刘巧芝 杨涵 徐薇 文莹 马维 何疆林 (74)专利代理机构 乌鲁木齐恒智专利商标代理事务所(普通合伙) 65102代理人 李靖(51)Int.Cl.A47L 1/02(2006.01)(54)实用新型名称一种具有风干功能的擦窗机器人(57)摘要本实用新型公开了一种具有风干功能的擦窗机器人,包括机器人壳体,所述机器人壳体的侧面拐角处转动设置有转向轮,所述机器人壳体的顶面上分别设置有提手和电源线插孔,所述机器人壳体的底面拐角处固定设置有边缘感应器,所述机器人壳体的底面上从上到下依次设置有湿清洁布、吸附腔、吸水海绵、气管一和干清洁布,所述吸附腔的两侧均设置有行走轮,所述气管一的底部设置有气嘴。
本实用新型通过设置湿清洁布、吸水海绵、气管一、气嘴和干清洁布,解决了传统的擦窗机器人在擦拭窗户时,水湿擦拭窗户后,玻璃的表面仍具有水渍,水渍上具有灰质掺杂在水渍中,通过风吹干后玻璃上具有水印,使得擦窗效果不佳的问题。
权利要求书1页 说明书4页 附图2页CN 209966264 U 2020.01.21C N 209966264U权 利 要 求 书1/1页CN 209966264 U1.一种具有风干功能的擦窗机器人,包括机器人壳体(1),其特征在于:所述机器人壳体(1)的侧面拐角处转动设置有转向轮(2),所述机器人壳体(1)的顶面上分别设置有提手(21)和电源线插孔(22),所述机器人壳体(1)的底面拐角处固定设置有边缘感应器(3),所述机器人壳体(1)的底面上从上到下依次设置有湿清洁布(4)、吸附腔(5)、吸水海绵(7)、气管一(8)和干清洁布(10),所述吸附腔(5)的两侧均设置有行走轮(6),所述气管一(8)的底部设置有气嘴(9),所述气管一(8)的顶部中心与波纹管(11)的一端固定连接,所述波纹管(11)的另一端与微型风机(12)的出风口固定连接,所述微型风机(12)的进风口与加热筒(13)的中部固定连接,所述加热筒(13)内设置有加热片(14),所述加热筒(13)的端部与气管二(15)的一端固定连接,所述气管二(15)的另一端延伸至机器人壳体(1)的外部,且所述气管二(15)内设置有过滤网一(16),所述气管二(15)的另一端端部设置有过滤网二(17)。
擦窗机器人[实用新型专利]
![擦窗机器人[实用新型专利]](https://img.taocdn.com/s3/m/745a18e079563c1ec4da71c9.png)
专利名称:擦窗机器人
专利类型:实用新型专利
发明人:陈爱兵
申请号:CN201920092252.X 申请日:20190121
公开号:CN209966260U
公开日:
20200121
专利内容由知识产权出版社提供
摘要:一种擦窗机器人,包含机器人本体和安全装置,所述安全装置包含卷线器和安全绳,所述卷线器设置在所述机器人本体上,所述安全绳的一端缠绕在卷线器上,另一端用于连接固定端。
本实用新型通过将卷线器设置在机器人本体上,并将出线孔设置为可绕旋转轴旋转,减少了擦窗机器人行走时所受到的阻力,解决了安全绳可能发生缠绕的问题,且止锁机构能够第一时间阻止绕线盘继续转动,防止擦窗机器人继续跌落,从而有效的保护了擦窗机器人的安全。
申请人:科沃斯机器人股份有限公司
地址:215168 江苏省苏州市吴中区石湖西路108号
国籍:CN
代理机构:北京信慧永光知识产权代理有限责任公司
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920404090.9
(22)申请日 2019.03.27
(73)专利权人 新疆石河子职业技术学院(石河
子市技工学校)
地址 832000 新疆维吾尔自治区石河子市
38号小区
(72)发明人 刘巧芝 周赞梅 吕洁 武亮
石妍 陈长营 徐薇 文莹
何疆林
(74)专利代理机构 乌鲁木齐恒智专利商标代理
事务所(普通合伙) 65102
代理人 李靖
(51)Int.Cl.
A47L 1/02(2006.01)
(54)实用新型名称一种仿生式擦窗机器人(57)摘要本实用新型公开了一种仿生式擦窗机器人,包括第一机壳和第二机壳,所述第一机壳的顶部与第一电动伸缩杆的活动端固定连接,所述第一电动伸缩杆的顶部固定有第一电机,所述第一电机的输出轴通过联轴器与第一转盘的底部转轴固定连接,所述第二机壳的顶部与第二电动伸缩杆的活动端固定连接,所述第二电动伸缩杆的顶部固定有第二电机,所述第二电机的输出轴通过联轴器与第二转盘的底部转轴固定连接,所述第一转盘和第二转盘之间固定有连接架,所述连接架的顶部固定有控制盒。
本实用新型通过设置第一电机、连接架、机械臂、侧清洁布、底清洁布和第二电机,解决了传统的擦窗机器人无法在窗户之间转移,
对窗户边角处擦拭不干净的问题。
权利要求书1页 说明书4页 附图2页CN 209966265 U 2020.01.21
C N 209966265
U
权 利 要 求 书1/1页CN 209966265 U
1.一种仿生式擦窗机器人,包括第一机壳(1)和第二机壳(2),其特征在于:所述第一机壳(1)的顶部与第一电动伸缩杆(3)的活动端固定连接,所述第一电动伸缩杆(3)的顶部固定有第一电机(4),所述第一电机(4)的输出轴通过联轴器与第一转盘(5)的底部转轴固定连接,所述第二机壳(2)的顶部与第二电动伸缩杆(17)的活动端固定连接,所述第二电动伸缩杆(17)的顶部固定有第二电机(18),所述第二电机(18)的输出轴通过联轴器与第二转盘(19)的底部转轴固定连接,所述第一转盘(5)和第二转盘(19)之间固定有连接架(6),所述连接架(6)的顶部固定有控制盒(7),所述连接架(6)的端部安装有机械臂(8),所述机械臂(8)的端部固定有安装架(9),所述安装架(9)上设置有侧清洁布(10),所述第一机壳(1)的底面上分别设置有真空吸盘(11)、行走轮(12)和底清洁布(13),所述第一机壳(1)的侧面拐角处转动设置有转向轮(15),所述第一机壳(1)的底面拐角处固定设置有边缘感应器(14),所述第一机壳(1)的顶面上设置有电源线插孔(16)。
2.根据权利要求1所述的一种仿生式擦窗机器人,其特征在于:所述机械臂(8)设置有两个,两个所述机械臂(8)对称设置在连接架(6)的两端。
3.根据权利要求1所述的一种仿生式擦窗机器人,其特征在于:所述侧清洁布(10)通过魔术贴粘接在安装架(9)上,所述底清洁布(13)亦通过魔术贴粘接在机壳的底面上。
4.根据权利要求1所述的一种仿生式擦窗机器人,其特征在于:所述行走轮(12)和底清洁布(13)均设置有两个,两个所述行走轮(12)对称设置在真空吸盘(11)的左右两侧,两个所述底清洁布(13)对称设置在真空吸盘(11)的前后两侧。
5.根据权利要求1所述的一种仿生式擦窗机器人,其特征在于:所述第二机壳(2)的底面结构与第一机壳(1)的底面结构相同。
6.根据权利要求1所述的一种仿生式擦窗机器人,其特征在于:所述转向轮(15)设置有四个,四个所述转向轮(15)均匀设置在机壳侧面的四个拐角处。
7.根据权利要求1所述的一种仿生式擦窗机器人,其特征在于:所述边缘感应器(14)设置有四个,四个所述边缘感应器(14)均匀设置在机壳底面的四个拐角处。
2。