HMM-前向-后向算法 举例
HMM-简介
P(O | λ) = ∑ β1 (i) i =1
解码问题—Viterbi算法
Viterbi算法采用动态规划算法。复杂度为O(K 2L) 。其中 K和 L分别为状态个数和序列长
度。
定义δ t (i )
=
max
q1,q2 ,...qt−1
P[q1 q2 ...qt−1 , qt
=
i, O1,O2,…Ot ,
3) 终止:
N
P(O | λ ) = ∑α T (i) i=1
其中递推是整个算法的核心。 后向算法和前向算法性质上是一样的,只是递推方向不同。定义后向变量:
β t (i) = P(Ot +1Ot +1...OT | qt = Si ,λ )
也就是给定模型参数,当时刻 t的状态是Si 的时候,从时刻 t+1到序列结束的输出观察序
对于 HMM 模型,其的状态转换过程是不可观察的,因而称之为“隐”马尔可夫模型。
HMM定义
1) X代表一组状态的集合,其中 X = {S1, S2,..., SN } ,状态数为 N,并用qt 来表示 t时刻的 状态。虽然状态是隐藏的,但对于很多应用来说,有一些物理的意义都和状态或者状态 集相关。状态内部的联系就是从一个状态可以到其它状态。
集合的元素作为混合高斯模型的分量,实现的是带隐变量的
最大似然估计。
的 HMM,可能有aij =0(对于一对或多对 i,j)。
4) 状态 j的观察概率分布 B = {b j (k)} ,表示状态 j输出相应观察值的概率,其中
bj (k )
=
P{O t
= Vk
|q t
=
S },1 ≤ j
j
≤
N
1≤k ≤ M 。
HMM的三个应用详细描述

HMM学习最佳范例
介绍
寻找一个事物在一段时间里的变化模式(规律); 这些模式发生在很多领域... 事实上任何领域中的一系列事件都有可能产生有用的模式 。
31
前向算法代码分析
32
谢谢
33
28
前向算法代码分析
29
前向算法代码分析
首先,需要定义HMM的数据结构,也就是HMM的五个基本要素,在 UMDHMM中是如下定义的(在hmm.h中):
30
前向算法代码分析
前向算法程序示例如下(在forward.c中): /* 函数参数说明: *phmm:已知的HMM模型;T:观察符号序列长度; *O:观察序列;**alpha:局部概率;*pprob:最终的观察概率 */
例子: 有人试图通过一片海藻推断天气——民间传说告诉我们 ‘湿透的’海藻意味着潮湿阴雨,而‘干燥的’海藻则意 味着阳光灿烂。如果它处于一个中间状态(‘有湿气’) ,我们就无法确定天气如何。然而,天气的状态并没有受 限于海藻的状态,所以我们可以在观察的基础上预测天气 是雨天或晴天的可能性。另一个有用的线索是前一天的天 气状态(或者,至少是它的可能状态)——通过综合昨天的 天气及相应观察到的海藻状态,我们有可能更好的预测今 天的天气。
8
生成模式总结
使用了离散时间点、离散状态以及做了马尔科夫假设; 马尔科夫过程的模式:它包含了一个 向量(初始概率)和 一个状态转移矩阵; 关于假设,重要的一点是状态转移矩阵并不随时间的改变 而改变—这个矩阵在整个系统的生命周期中是固定不变的 。
带驻留时间HMM2的Forward-Backward算法
作者简介 :t i世平 (90 , , 17 一)男 四川渠县人 , 副教授 , 事随机信号处理 和生 物信 息研究. 从
中图分类 号 : 1 . 022 7
一
文献 标 识码 : A
个隐马尔可夫模型是指一个不可观测 的马尔可夫链 ( 称为状态过程) 和它 的一个可观测 的随机过 程( 称为观测过程) 的整体. 隐马尔可夫模型是பைடு நூலகம்种应用非常广泛的统计模型 , 最早是从语音识别问题 中 发展起 来 的. 在传统 的隐马尔可夫模型( aioa hde a o oe, t d i l i nM r vm dl简称 T M 中, r tn d k H M) 模型在某 状态停 留一定
定 义 1 前 向变 量 :
( ,, ) =P( 10 , , g_ i d j 0 ,2 … 0,| l=s, = , s)= dl i g f (, d A) () 3
前 向变量 (, d 是指在给定模型 A的条件下 , i ,) j 产生 t 以前的部分观测序列 o , , o; 。o …, 且在 t : 一1 时刻 状态 为 : ,时 刻状 态为 : , st s 以及 在 t 刻状 态所 驻 留 的时间 的概率 . , 时
时 间的概率 随着 时 间 的增 长呈 指数 下 降趋 势 , 得 T 使 HMM 不 能合 适 地 表 征 信号 的时 域 结 构 , 为通 常各 因 状态都应该在平均驻 留附近的概率最高l 3. 了弥补 T M 的这一缺点 , 1 为 -J H M 人们提出了许多种方法试 图
隐马尔可夫链解码问题使用的经典算法

隐马尔可夫链解码问题使用的经典算法1. 引言隐马尔可夫模型(Hidden Markov Model, HMM)是一种用于描述时序数据的统计模型,广泛应用于语音识别、自然语言处理、生物信息学等领域。
在HMM中,我们经常面临的一个重要问题是解码问题,即根据观测序列推断隐藏状态序列的问题。
为了解决这一问题,经典算法中有几种常用的方法,本文将对其中的经典算法进行深入探讨。
2. 维特比算法(Viterbi Algorithm)维特比算法是解决HMM解码问题的经典算法之一。
它基于动态规划的思想,通过递归地计算最优路径来推断隐藏状态序列。
在该算法中,我们需要利用马尔可夫假设和观测状态的概率分布,使用动态规划的方法找到最有可能的隐藏状态序列。
维特比算法的时间复杂度为O(N^2T),其中N为隐藏状态的个数,T为观测序列的长度。
3. 前向后向算法(Forward-Backward Algorithm)前向后向算法是另一种常用的HMM解码算法。
该算法利用前向概率和后向概率来计算在每个时刻t处于状态i的概率,从而得到最优的隐藏状态序列。
与维特比算法相比,前向后向算法更侧重于计算整条观测序列的似然度,而不是单个最优路径。
该算法的时间复杂度为O(NT^2),其中N为隐藏状态的个数,T为观测序列的长度。
4. Baum-Welch算法除了维特比算法和前向后向算法,Baum-Welch算法也是解决HMM解码问题的一种重要算法。
该算法是一种无监督学习算法,用于估计HMM的参数,包括隐藏状态转移概率和观测状态概率。
通过不断迭代E步和M步,Baum-Welch算法可以得到最优的HMM参数估计。
这些参数可以用于后续的解码问题,从而得到最优的隐藏状态序列。
5. 总结与展望在本文中,我们对解决HMM解码问题的经典算法进行了深入探讨。
维特比算法、前向后向算法和Baum-Welch算法都是解决HMM解码问题的重要工具,它们在不同应用领域都有着广泛的应用。
隐马尔可夫过程
隐马尔可夫过程1. 引言隐马尔可夫过程(Hidden Markov Model, HMM)是一种用于建模时序数据的概率图模型。
它在自然语言处理、语音识别、生物信息学等领域得到广泛应用。
隐马尔可夫过程以两个基本假设为前提:1)当前状态只与前一个状态有关;2)当前观察结果只与当前状态有关。
本文将介绍隐马尔可夫过程的基本概念、数学模型、算法推导以及应用案例。
2. 隐马尔可夫过程的基本概念隐马尔可夫过程由状态序列和观察序列两部分组成。
状态序列表示系统内部的状态演化过程,观察序列表示在各个状态下的可见观察结果。
隐马尔可夫过程包括以下几个基本概念:2.1 隐藏状态隐藏状态是指系统内部的未知状态,对外不可见。
隐马尔可夫过程假设隐藏状态满足马尔可夫性质,即当前状态只与前一个状态有关。
常见的例子包括天气的状态(晴、阴、雨)等。
2.2 观察结果观察结果是可以观测到的外部表现,反映了隐藏状态的一部分信息。
观察结果与隐藏状态之间存在关联关系,但观察结果并不能完全确定隐藏状态。
在天气的例子中,观察结果可以是人们对天空的直接观察,如晴朗的天空、阴沉的天空等。
2.3 转移概率转移概率是指在给定隐藏状态的条件下,从一个隐藏状态转移到另一个隐藏状态的概率。
转移概率表示了隐藏状态之间的演化关系。
在天气的例子中,转移概率可以表示为从晴天到阴天、从阴天到雨天等的概率。
2.4 发射概率发射概率是指在给定隐藏状态的条件下,产生某个观察结果的概率。
发射概率表示了隐藏状态与观察结果之间的关联关系。
在天气的例子中,发射概率可以表示为在不同天气状态下,观察到某种天空情况的概率。
3. 隐马尔可夫过程的数学模型隐马尔可夫过程可以用数学模型来描述。
其数学模型包括隐藏状态、观察结果、转移概率和发射概率四个要素。
3.1 隐藏状态集合隐藏状态集合表示所有可能的隐藏状态,用S表示。
在天气的例子中,S可以表示为{晴天,阴天,雨天}。
3.2 观察结果集合观察结果集合表示所有可能的观察结果,用O表示。
隐马尔科夫(HMM)模型详解及代码实现

机器学习之隐马尔科夫模型(HMM)机器学习之隐马尔科夫模型(HMM)1、隐马尔科夫模型介绍2、隐马尔科夫数学原理3、Python代码实现隐马尔科夫模型4、总结隐马尔可夫模型介绍马尔科夫模型(hidden Markov model,HMM)是关于时序的概率模型,描述由一个隐藏的马尔科夫随机生成不可观测的状态随机序列,再由各个状态生成一个观测从而产生观测随机序列的过程,属于一个生成模型。
下面我们来从概率学角度定义马尔科夫模型,从一个典型例子开始:假设有4个盒子,每个盒子里面有不同数量的红、白两种颜色的球,具体如下表:盒子编号1234红球数5368白球数5742现在从这些盒子中取出T个球,取样规则为每次选择一个盒子取出一个球,记录其颜色,放回。
在这个过程中,我们只能观测到球的颜色的序列,观测不到球是从哪个盒子中取出来的,即观测不到盒子的序列,这里有两个随机序列,一个是盒子的序列(状态序列),一个是球的颜色的观测序列(观测序列),前者是隐藏的,只有后者是可观测的。
这里就构成了一个马尔科夫的例子。
定义是所有的可能的状态集合,V是所有的可能的观测的集合:其中,N是可能的状态数,M是可能的观测数,例如上例中N=4,M=2。
是长度为T的状态序列,是对应的观测序列:A是状态转移概率矩阵:其中, 是指在时刻处于状态的条件下在时刻转移到状态的概率。
B是观测概率矩阵:其中, 是指在时刻处于状态的条件下生成观测的概率。
是初始状态概率向量:其中, 是指在时刻=1处于状态的概率。
由此可得到,隐马尔可夫模型的三元符号表示,即称为隐马尔可夫模型的三要素。
由定义可知隐马尔可夫模型做了两个基本假设:(1)齐次马尔科夫性假设,即假设隐藏的马尔科夫链在任意时刻的状态只和-1状态有关;(2)观测独立性假设,观测只和当前时刻状态有关;仍以上面的盒子取球为例,假设我们定义盒子和球模型:状态集合: = {盒子1,盒子2,盒子3,盒子4}, N=4观测集合: = {红球,白球} M=2初始化概率分布:状态转移矩阵:观测矩阵:(1)转移概率的估计:假设样本中时刻t处于状态i,时刻t+1转移到状态j 的频数为那么转台转移概率的估计是:(2)观测概率的估计:设样本中状态为j并观测为k的频数是那么状态j观测为k的概率, (3)初始状态概率的估计为S个样本中初始状态为的频率。
hmm算法例题

hmm算法例题HMM(隐马尔可夫模型)算法是一种常用的统计模型,用于描述时间序列数据的内在结构和规律。
以下是一个简单的HMM算法的例子:假设我们有一个简单的语言模型,其中有两个状态:“a”和“b”,以及两个观测值:“0”和“1”。
状态转移概率矩阵如下:```cssA = [ ; ]```其中,第一行表示从状态“a”转移到状态“a”和状态“b”的概率,第二行表示从状态“b”转移到状态“a”和状态“b”的概率。
同时,我们也有一个观测概率矩阵如下:```cssB = [ ; ]```其中,第一列表示在状态“a”下观测到“0”和“1”的概率,第二列表示在状态“b”下观测到“0”和“1”的概率。
现在,我们有一个观测序列[1, 0, 1, 1, 0, 1],我们想知道这个序列对应的隐藏状态序列是什么。
根据HMM算法,我们可以使用前向算法或者后向算法来求解。
这里我们使用前向算法来求解。
首先,我们需要计算前向概率:初始时,所有的前向概率都是1,然后我们按照时间步逐个计算前向概率:时刻1的前向概率为:P(aO) = P(O1) P(a1) = =P(bO) = P(O1) P(b1) = =时刻2的前向概率为:P(aO) = P(O2a1) P(a2a) P(a1) + P(O2b1) P(a2b) P(b1) = + = + =P(bO) = P(O2b1) P(b2b) P(b1) = =时刻3的前向概率为:P(aO) = P(O3a2) P(a3a) P(a2a) + P(O3b2) P(a3b) P(b2b) = + = + =P(bO) = P(O3b2) P(b3b) P(b2b) = =时刻4的前向概率为:P(aO) = P(O4a3) P(a4a) P(a3a) + P(O4b3) P(a4b) P(b3b) = + = + =P(bO) = P(O4b3) P(b4b) P(b3b) = =时刻5的前向概率为:P(aO) = P(O5a4) P(a5a) P(a4a) + P(O5b4) P(a5b) P(b4b) = (1-P(O5a4)) P(O5b4) P(b5b) P(b4b)= () (1-0。
HMM(隐马尔可夫模型)及其应用

HMM(隐马尔可夫模型)及其应用摘要:隐马尔可夫模型(Hidden Markov Model,HMM)作为一种统计分析模型,创立于20世纪70年代。
80年代得到了传播和发展,成为信号处理的一个重要方向,现已成功地用于语音识别,行为识别,文字识别以及故障诊断等领域。
本文先是简要介绍了HMM的由来和概念,之后重点介绍了3个隐马尔科夫模型的核心问题。
关键词:HMM,三个核心问题HMM的由来1870年,俄国有机化学家Vladimir V. Markovnikov第一次提出马尔可夫模型。
马尔可夫在分析俄国文学家普希金的名著《叶夫盖尼•奥涅金》的文字的过程中,提出了后来被称为马尔可夫框架的思想。
而Baum及其同事则提出了隐马尔可夫模型,这一思想后来在语音识别领域得到了异常成功的应用。
同时,隐马尔可夫模型在“统计语言学习”以及“序列符号识别”(比如DNA序列)等领域也得到了应用。
人们还把隐马尔可夫模型扩展到二维领域,用于光学字符识别。
而其中的解码算法则是由Viterbi和他的同事们发展起来的。
马尔可夫性和马尔可夫链1. 马尔可夫性如果一个过程的“将来”仅依赖“现在”而不依赖“过去”,则此过程具有马尔可夫性,或称此过程为马尔可夫过程。
马尔可夫性可用如下式子形象地表示:X(t+1)=f(X(t))2. 马尔可夫链时间和状态都离散的马尔可夫过程称为马尔可夫链。
记作{Xn=X(n), n=0,1,2,…}这是在时间集T1={0,1,2,…}上对离散状态的过程相继观察的结果。
链的状态空间记作I={a1, a2,…}, ai ∈R.条件概率Pij(m, m+n)=P{ Xm+n = aj | Xm = aj }为马氏链在时刻m处于状态ai条件下,在时刻m+n转移到状态aj的转移概率。
3. 转移概率矩阵如下图所示,这是一个转移概率矩阵的例子。
由于链在时刻m从任何一个状态ai出发,到另一时刻m+n,必然转移到a1,a2…,诸状态中的某一个,所以有当与m无关时,称马尔可夫链为齐次马尔可夫链,通常说的马尔可夫链都是指齐次马尔可夫链。
hmm前向后向算法理解

hmm前向后向算法理解前向后向算法(Forward-Backward Algorithm)是一种在隐马尔可夫模型(Hidden Markov Model,HMM)中进行推断的方法,用于计算给定观测序列下的后验概率分布。
它将观测序列的所有可能状态序列的概率加权平均,得到每个状态在每个时刻的后验概率。
HMM是一个统计模型,用于描述以概率方式变化的序列数据。
它由一组隐藏状态和一组可观测的符号组成。
在HMM中,隐藏状态无法直接观测到,只能通过可观测的符号序列来推断。
前向后向算法就是用来对隐藏状态的后验概率进行估计的。
算法的核心思想是利用动态规划的方法,通过递推计算完成。
在前向过程中,我们通过观测序列逐步计算每个隐藏状态在当前时刻的后验概率。
在后向过程中,我们从最后一个观测开始,逐步计算每个隐藏状态在当前时刻的后验概率。
最终将两者结合,得到每个状态在每个时刻的后验概率。
具体来说,前向算法通过以下方程进行计算:1.初始化:计算初始时刻每个隐藏状态的后验概率P(State1) = Initial Probability Distribution *P(Observation1,State1)2.递推计算:计算每个时刻每个隐藏状态的后验概率P(State_t) = sum(P(State_t-1) * Transition Probability *P(Observation_t,State_t))3.终止:计算最终时刻每个隐藏状态的后验概率P(State_T) = sum(P(State_T-1) * Transition Probability)在后向过程中,我们通过以下方程进行计算:1.初始化:计算最终时刻每个隐藏状态的后验概率P(State_T) = 12.递推计算:计算每个时刻每个隐藏状态的后验概率P(State_t) = sum(Transition Probability * P(Observation_t+1,State_t+1) * P(State_t+1))最后,我们将前向过程和后向过程的结果结合,计算每个状态在每个时刻的后验概率:P(State_t,all Observations) = (P(State_t) * P(State_t,Observation_t)) / sum(P(State_t') * P(State_t',Observation_t))其中,P(State_t,Observation_t)是观测序列的一个概率。
HMM及其算法介绍
HMM简介
• HMM实际上是一个双重随机过程:底层是 马尔科夫模型的概率状态转移过程,另一 重是从底层状态到表层观察值的随机过程。 • HMM实质上就是隐藏了状态的马尔科夫模 型,模型状态不能直接可见,只能观察到 由状态到符号的映射过程所产生的观察值 序列。
HMM定义
HMM可以定义为五元组:λ=(S,V,Π,A,B): • 有限状态集合:S={s1,s2,⋯,sN}; • 有限观察符号集合:V={v1,v2,⋯,vM}; • 初始化概率向量:Π={πj }, j ∈S; • 状态转移矩阵:A(N×N)={aij},i,j∈S; aij = P(sj|si) • 观察概率矩阵:B(N×M)={bjk},j∈S, k∈V. bjk = P(vk|sj)
• 定义后向变量: αt(i) = P(O1O2……Ot , qt = Si | λ) βt(i) = P(Ot+1Ot+2……OT |qt = Si, λ) • 给定观察序列O及HMM,定义t时刻位于隐 藏状态Si的概率变量为: γt(i) = P(qt = Si | O, λ) • 给定观察序列O及HMM,定义t时刻位于隐 藏状态Si及t+1时刻位于隐藏状态Sj的概率变 量为: ξt(i,j) = P(qt = Si , qt+1= Sj | O, λ)
谢谢!
P(O1, O2, O3|S1, S1, S1) P(O1, O2, O3|S1, S1, S2) P(O1, O2, O3|S1, S1, S3) …… P(O1, O2, O3|S3, S3, S3)
取最大值
• 局部最佳路径与局部概率δt(i) 对每一个中间和终止状态,都有一个到达 该状态的最可能路径,即局部最佳路径。
隐形马尔科夫模型
yesterday Cloudy 0.250 0.125 0.625 Rainy 0.250 0.375 0.375
5、混淆矩阵:
observed states
Dry Dryish Damp Soggy
Sunny 0.60 0.20 0.15 0.05
Hidden Cloudy 0.25 0.25 0.25 0.25
2、观察状态(海藻湿度):Dry,Dryish,Damp, Soggy; 3、初始状态概率: Sunny(0.63),Cloudy (0.17),Rainy(0.20);
4、状态转移矩阵:
weather today
Sunny Cloudy Rainy
weather Sunny 0.500 0.375 0.125
如:天气情况(晴、多云、和雨)
非确定性的生成模式(天气预测)
假设该过程是一个一阶过程,即今天的天气情况仅 和昨天的天气有关用状态 Nhomakorabea移矩阵描述
非确定性的生成模式(天气预测)
定义初始概率,称为向量 ;
一个一阶马尔科夫模型,包括如下概念:
状态:晴、多云、雨 状态转移概率 初始概率
当一个隐士不能通过直接观察天气状态来预测 天气时,但他有一些水藻。民间的传说告诉我 们水藻的状态与天气有一定的概率关系。也就 是说,水藻的状态与天气时紧密相关的。此时, 我们就有两组状态:观察状态(水藻的状态) 和隐含状态(天气状态)。因此,我们希望得 到一个算法可以为隐士通过水藻和马尔科夫过 程,在没有直接观察天气的情况下得到天气的 变化情况。
利用前向算法来得到观察状态序列对应于一个HMM 的概率
解码:根据观察序列找到最有可能出现的隐状 态序列
viterbi算法(隐士只能通过感受水藻的状态来 判断天气状况)
hmm三个基本问题及相应算法

HMM三个基本问题及相应算法
HMM的三个基本问题
隐马尔科夫模型(Hidden Markov Model,简称HMM)是用于处理序列数据的统计模型,广泛应用于语音识别、自然语言处理、生物特征识别等领域。
HMM的三个基本问题是:
1. 概率计算问题:给定HMM模型和观测序列,如何计算在某个状态或状态转移下的概率?
2. 最优状态序列问题:给定HMM模型和观测序列,如何找到最优的状态序列,即最大概率的状态序列?
3. 参数学习问题:给定一组观测数据,如何估计HMM模型的参数,即状态转移概率、发射概率等?
相应算法
针对HMM的三个基本问题,有以下相应的算法:
1. 前向-后向算法:用于解决概率计算问题,可以计算在某个状态或状态转移下的概率。
算法基于动态规划的思想,通过递推计算前
向概率和后向概率,进而得到状态转移概率和发射概率的计算公式。
2. Viterbi算法:用于解决最优状态序列问题,可以找到最优的状态序列。
算法基于动态规划的思想,通过递推计算每个时刻的最优状态,并在每个时刻更新最优路径,最终得到最优状态序列。
Viterbi算法的时间复杂度为O(n*k^2),其中n为观测序列的长度,k为状态数。
以上是HMM三个基本问题及相应算法的简要介绍。
在实际应用中,需要根据具体问题选择合适的算法,并结合数据特点进行模型参数的学习和调整。
HMM基本算法
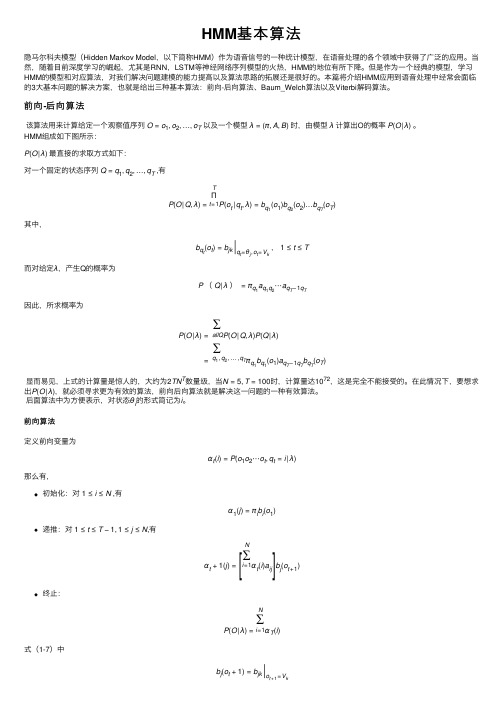
HMM 基本算法隐马尔科夫模型(Hidden Markov Model ,以下简称HMM )作为语⾳信号的⼀种统计模型,在语⾳处理的各个领域中获得了⼴泛的应⽤。
当然,随着⽬前深度学习的崛起,尤其是RNN ,LSTM 等神经⽹络序列模型的⽕热,HMM 的地位有所下降。
但是作为⼀个经典的模型,学习HMM 的模型和对应算法,对我们解决问题建模的能⼒提⾼以及算法思路的拓展还是很好的。
本篇将介绍HMM 应⽤到语⾳处理中经常会⾯临的3⼤基本问题的解决⽅案,也就是给出三种基本算法:前向-后向算法、Baum_Welch 算法以及Viterbi 解码算法。
前向-后向算法该算法⽤来计算给定⼀个观察值序列 O =o 1,o 2,…,o T 以及⼀个模型 λ=(π,A ,B ) 时,由模型 λ 计算出O 的概率 P (O |λ) 。
HMM 组成如下图所⽰:P (O |λ) 最直接的求取⽅式如下:对⼀个固定的状态序列 Q =q 1,q 2,…,q T ,有P (O |Q ,λ)=T Πt =1P (o t |q t ,λ)=b q 1(o 1)b q 2(o 2)…b q T(o T )其中,b q t (o t )=b jk q t =θj ,o t =V k,1≤t ≤T⽽对给定λ,产⽣Q 的概率为P (Q |λ)=πq 1a q 1q 2⋯a q T −1q T因此,所求概率为P (O |λ)=∑allQ P (O |Q ,λ)P (Q |λ)=∑q 1,q 2,…,q T πq 1b q 1(o 1)a q T −1q T b q T(o T ) 显⽽易见,上式的计算量是惊⼈的,⼤约为2TN T 数量级,当N =5,T =100时,计算量达1072,这是完全不能接受的。
在此情况下,要想求出P (O |λ),就必须寻求更为有效的算法,前向后向算法就是解决这⼀问题的⼀种有效算法。
后⾯算法中为⽅便表⽰,对状态θi 的形式简记为i 。
隐马尔可夫模型三个基本问题以及相应的算法

隐马尔可夫模型三个基本问题以及相应的算法一、隐马尔可夫模型(Hidden Markov Model, HMM)隐马尔可夫模型是一种统计模型,它描述由一个隐藏的马尔可夫链随机生成的不可观测的状态序列,再由各个状态生成一个观测而产生观测序列的过程。
HMM广泛应用于语音识别、自然语言处理、生物信息学等领域。
二、三个基本问题1. 概率计算问题(Forward-Backward算法)给定模型λ=(A,B,π)和观察序列O=(o1,o2,…,oT),计算在模型λ下观察序列O出现的概率P(O|λ)。
解法:前向-后向算法(Forward-Backward algorithm)。
前向算法计算从t=1到t=T时,状态为i且观察值为o1,o2,…,ot的概率;后向算法计算从t=T到t=1时,状态为i且观察值为ot+1,ot+2,…,oT的概率。
最终将两者相乘得到P(O|λ)。
2. 学习问题(Baum-Welch算法)给定观察序列O=(o1,o2,…,oT),估计模型参数λ=(A,B,π)。
解法:Baum-Welch算法(EM算法的一种特例)。
该算法分为两步:E 步计算在当前模型下,每个时刻处于每个状态的概率;M步根据E步计算出的概率,重新估计模型参数。
重复以上两步直至收敛。
3. 预测问题(Viterbi算法)给定模型λ=(A,B,π)和观察序列O=(o1,o2,…,oT),找到最可能的状态序列Q=(q1,q2,…,qT),使得P(Q|O,λ)最大。
解法:Viterbi算法。
该算法利用动态规划的思想,在t=1时初始化,逐步向后递推,找到在t=T时概率最大的状态序列Q。
具体实现中,使用一个矩阵delta记录当前时刻各个状态的最大概率值,以及一个矩阵psi记录当前时刻各个状态取得最大概率值时对应的前一时刻状态。
最终通过回溯找到最可能的状态序列Q。
三、相应的算法1. Forward-Backward算法输入:HMM模型λ=(A,B,π)和观察序列O=(o1,o2,…,oT)输出:观察序列O在模型λ下出现的概率P(O|λ)过程:1. 初始化:$$\alpha_1(i)=\pi_ib_i(o_1),i=1,2,…,N$$2. 递推:$$\alpha_t(i)=\left[\sum_{j=1}^N\alpha_{t-1}(j)a_{ji}\right]b_i(o_t),i=1,2,…,N,t=2,3,…,T$$3. 终止:$$P(O|λ)=\sum_{i=1}^N\alpha_T(i)$$4. 后向算法同理,只是从后往前递推。
HMM及其算法介绍

HMM及其算法介绍隐马尔可夫模型(Hidden Markov Model,HMM)是一种统计模型,用于描述具有潜在不可见状态的动态系统。
HMM主要用于序列数据的建模与分析,特别适用于语音识别、自然语言处理、语言模型、机器翻译等领域。
HMM是一种二层结构的概率图模型,包括状态序列和观测序列。
其中,状态序列代表系统内部的状态变化,而观测序列是根据系统状态产生的可见数据。
HMM的基本假设是系统状态满足马尔可夫性质,即当前状态只依赖于前一个状态。
HMM模型的核心是三个问题:评估问题、解码问题和学习问题。
评估问题是给定一个观测序列和模型参数,计算该观测序列出现的概率。
该问题可以使用前向算法和后向算法来解决。
前向算法从初始状态开始,计算每个时刻观测序列的概率;后向算法从最后一个状态开始,计算每个时刻观测序列的概率。
最后,两个算法的结果相乘得到观测序列的概率。
解码问题是给定一个观测序列和模型参数,找到最有可能的状态序列。
常用的解码算法有维特比算法和后向算法。
维特比算法通过动态规划的方式,计算每个时刻的最大概率状态,并在整个过程中维护一个路径矩阵,得到最有可能的状态序列。
学习问题是给定观测序列,估计模型参数。
通常使用的方法是极大似然估计,通过最大化观测序列的似然函数来估计模型参数。
Baum-Welch算法是HMM中常用的学习算法,它利用了前向算法和后向算法的结果,通过迭代优化模型参数,直到收敛。
HMM模型的应用之一是语音识别。
在语音识别中,观测序列是听到的声音,而状态序列代表对应的语音单元(如音素、词语)。
通过训练HMM模型,可以将声音与语音单元映射起来,从而实现语音的识别。
另一个常见的应用是自然语言处理中的词性标注。
词性标注是给每个词语标注上对应的词性,如名词、动词、形容词等。
通过训练HMM模型,可以将词语作为观测序列,词性作为状态序列,从而实现词性标注的任务。
总结来说,HMM是一种用于序列数据建模的统计模型,具有评估问题、解码问题和学习问题等核心问题。
HMM学习问题课件

HMM学习最佳范例根据观察序列生成隐马尔科夫模型。
评估(前向算法):它被用来测量一个模型的相对适用性解码(维特比算法):它被用来推测模型隐藏的部分在做什么(“到底发生了”什么)。
在许多实际问题的情况下这些参数都不能直接计算的,而要需要进行估计——这就是隐马尔科夫模型中的学习问题。
前向-后向算法:以一个观察序列为基础来进行这样的估计,而这个观察序列来自于一个给定的集合,它所代表的是一个隐马尔科夫模型中的一个已知的隐藏集合。
名称由来:因为对于网格中的每一个状态,它既计算到达此状态的“前向”概率(给定当前模型的近似估计),又计算生成此模型最 终状态的“后向”概率(给定当前模型的近似估计)。
首先了解:后向算法和EM算法。
前向-后向算法是EM算法的一个特例。
前向-后向算法是Baum于1972年提出来的,又称之为Baum-Welch算法。
前向算法:局部概率at(i),称其为前向变量。
后向算法:定义一个后向变量Bt(i):后向变量(局部概率)表示的是已知隐马尔科夫模型 及t时刻位于隐藏状态Si这一事实的概率。
从后向前(故称之为后向算法)递归地计算后向变量:1)初始化,令t=T时刻所有状态的后向变量为1:2)归纳,递归计算每个时间点,t=T-1,T-2,…,1时的后向变量:这样我们就计算出每个时间点上所有的隐藏状态所对应的后向变量。
t+1时刻与t时刻的后向变量之间的关系:后向算法程序EM 算法是 Dempster,Laind,Rubin 于 1977 年提出的求参数极大似然估计的一种方法,它可以从非完整数据集中对参数进行MLE(最大似然估计)估计,是一种非常简单实用的学习算法。
这种方法可以广泛地应用于处理缺损数据,截尾数据,带有讨厌数据等所谓的不完全数据(incomplete data)。
EM算法包括两个步骤:由E步和M步组成,通过交替使用这两个步骤,EM 算法逐步改进模型的参数的似然概率逐渐增大,最后终止于一个极大点。
向前-向后算法(forward-backward algorithm)

向前-向后算法(forward-backward algorithm)本文承接上篇博客《隐马尔可夫模型及的评估和解码问题》,用到的概念和例子都是那里面的。
学习问题在HMM模型中,已知隐藏状态的集合S,观察值的集合O,以及一个观察序列(o1,o2,...,o n),求使得该观察序列出现的可能性最大的模型参数(包括初始状态概率矩阵π,状态转移矩阵A,发射矩阵B)。
这正好就是EM算法要求解的问题:已知一系列的观察值X,在隐含变量Y未知的情况下求最佳参数θ*,使得:在中文词性标注里,根据为训练语料,我们观察到了一系列的词(对应EM中的X),如果每个词的词性(即隐藏状态)也是知道的,那它就不需要用EM来求模型参数θ了,因为Y是已知的,不存在隐含变量了。
当没有隐含变量时,直接用maximum likelihood就可以把模型参数求出来。
预备知识首先你得对下面的公式表示认同。
以下都是针对相互独立的事件,P(A,B)=P(B|A)*P(A)P(A,B,C)=P(C)*P(A,B|C)=P(A,C|B)*P(B)=P(B,C|A)*P(A)P(A,B,C,D)=P(D)*P(A,B|D)*P(C|A)=P(D)*P(A,B|D)*P(C|B)P(A,B|C)=P(D1,A,B|C)+P(D2,A,B|C) D1,D2是事件D的一个全划分理解了上面几个式子,你也就能理解本文中出现的公式是怎么推导出来的了。
EM算法求解我们已经知道如果隐含变量Y是已知的,那么求解模型参数直接利用Maximum Likelihood就可以了。
EM算法的基本思路是:随机初始化一组参数θ(0),根据后验概率Pr(Y|X;θ)来更新Y 的期望E(Y),然后用E(Y)代替Y求出新的模型参数θ(1)。
如此迭代直到θ趋于稳定。
在HMM问题中,隐含变量自然就是状态变量,要求状态变量的期望值,其实就是求时刻t i观察到x i时处于状态s i的概率,为了求此概率,需要用到向前变量和向后变量。
隐马尔可夫模型三个基本问题及算法

隐马尔可夫模型三个基本问题及算法隐马尔可夫模型(Hien Markov Model, HMM)是一种用于建模具有隐藏状态和可观测状态序列的概率模型。
它在语音识别、自然语言处理、生物信息学等领域广泛应用,并且在机器学习和模式识别领域有着重要的地位。
隐马尔可夫模型有三个基本问题,分别是状态序列概率计算问题、参数学习问题和预测问题。
一、状态序列概率计算问题在隐马尔可夫模型中,给定模型参数和观测序列,计算观测序列出现的概率是一个关键问题。
这个问题通常由前向算法和后向算法来解决。
具体来说,前向算法用于计算给定观测序列下特定状态出现的概率,而后向算法则用于计算给定观测序列下前面状态的概率。
这两个算法相互协作,可以高效地解决状态序列概率计算问题。
二、参数学习问题参数学习问题是指在给定观测序列和状态序列的情况下,估计隐马尔可夫模型的参数。
通常采用的算法是Baum-Welch算法,它是一种迭代算法,通过不断更新模型参数来使观测序列出现的概率最大化。
这个问题的解决对于模型的训练和优化非常重要。
三、预测问题预测问题是指在给定观测序列和模型参数的情况下,求解最可能的状态序列。
这个问题通常由维特比算法来解决,它通过动态规划的方式来找到最可能的状态序列,并且在很多实际应用中都有着重要的作用。
以上就是隐马尔可夫模型的三个基本问题及相应的算法解决方法。
在实际应用中,隐马尔可夫模型可以用于许多领域,比如语音识别中的语音建模、自然语言处理中的词性标注和信息抽取、生物信息学中的基因预测等。
隐马尔可夫模型的强大表达能力和灵活性使得它成为了一个非常有价值的模型工具。
在撰写这篇文章的过程中,我对隐马尔可夫模型的三个基本问题有了更深入的理解。
通过对状态序列概率计算问题、参数学习问题和预测问题的深入探讨,我认识到隐马尔可夫模型在实际应用中的重要性和广泛适用性。
隐马尔可夫模型的算法解决了许多实际问题,并且在相关领域有着重要的意义。
隐马尔可夫模型是一种强大的概率模型,它的三个基本问题和相应的算法为实际应用提供了重要支持。
HMM学习笔记_2(从一个实例中学习HMM前向算法)

HMM学习笔记_2(从⼀个实例中学习HMM前向算法)HMM算法想必⼤家已经听说了好多次了,完全看公式⼀头雾⽔。
但是HMM的基本理论其实很简单。
因为HMM是马尔科夫链中的⼀种,只是它的状态不能直接被观察到,但是可以通过观察向量间接的反映出来,即每⼀个观察向量由⼀个具有相应概率密度分布的状态序列产⽣,⼜由于每⼀个状态也是随机分布的,所以HMM是⼀个双重随机过程。
HMM是语⾳识别,⼈体⾏为识别,⽂字识别等领域应⽤⾮常⼴泛。
⼀个HMM模型可以⽤5个元素来描述,包过2个状态集合和3个概率矩阵。
其分别为隐含状态S,可观测状态O,初始状态概率矩阵π,隐含状态概率转移矩阵A,观测状态转移概率矩阵 B。
HMM在实际应⽤中主要⽤来解决3类问题。
1. 评估问题。
即给定观测序列 O=O1O2O3…Ot和模型参数λ=(A,B,π),怎样有效计算这⼀观测序列出现的概率2. 解码问题。
即给定观测序列 O=O1O2O3…Ot和模型参数λ=(A,B,π),怎样寻找满⾜这种观察序列意义上最优的隐含状态序列S。
3. 学习问题。
即HMM的模型参数λ=(A,B,π)未知,如何求出这3个参数以使观测序列O=O1O2O3…Ot的概率尽可能的⼤。
这篇⽂章是针对第⼀个问题来说的,⼀般采⽤的是前向后向算法来解决评估问题。
这⾥将的是前向算法。
在此之前,先引⼊⼏个符号:a t(i) :表⽰到第t个观察值Ot时处于状态i。
:表⽰在状态i下产⽣观察值的概率。
现在来看⼀下前向算法的理论来源。
因为我们要解决的是模型估计问题。
即计算概率。
将其利⽤如下公式化简:因此⾸先要先计算,其中Q为⼀给定的状态序列。
⼜有。
其中所以。
因此最后求得由此可以看见其计算复杂度⾮常⼤,为。
为了解决这个问题,前向算法就出现了。
⾸先定义了⼀个前向变量。
表⽰从1到t,输出符号o序列,t时刻处于状态i的累计输出概率。
因为前向变量有如下性质:初值:,且,最后有递推关系:。
为什么这样就可以简化计算复杂度呢?其原因很简单,因为每⼀次的a t(i),我们都可以⽤a t-1(i)来计算,就不⽤重复计算了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华夏35度
Data Mining,NLP,Search Engine
EM算法
本文试图用最简单的例子、最浅显的方式说明EM(Expectation Maximization)算法的应用场景和使用方法,而略去公式的推导和收敛性的证明。
以下内容翻译自《Data-Intensive Text Processing with MapReduce》。
Maximum Likelihood Estimation
Maximum Likelihood Estimation(MLE)是要选择一个最佳参数θ*,使得从训练集中观察到和情况出现的概率最大。
即模型:
举例来说明。
如下图
一个小黑球沿着一个三角形的木桩滚入杯子a或b中,可建立一个概率模型,由于是二值的,设服从Bernoulli分布,概率密度函数为:
p是k=0的概率,也是我们要使用MLE方法要确定的参数。
在上面的滚球实验中,我们令Y是待确定的参数,X是观察到的结果。
连续10次实验,观察到的结果是X=
(b,b,b,a,b,b,b,b,b,a)。
小球进入a杯的概率为p,则满足10次实验的联合概率为:
为了使X发生的概率最大,令上式一阶求导函数为0,得p=0.2。
含有隐含变量的弹球实验
如上图,现在又多了两块三角形木桩,分别标记序号为0,1,2。
并且实验中我们只知道小球最终进入了哪个杯子,中间的路线轨迹无从得知。
X取值于{a,b,c}表示小球进入哪个杯子。
Y取值于{0,1,2,3}表示小球进入杯子前最后一步走的是哪条线路。
小球在3个木桩处走右边侧的概率分别是p=(p0,p1,p2)。
跟上例中一样,X表示训练集观测到的值,p是模型参数,而这里的Y就是"隐含变量"。
假如我们做了N次实验,小球经过路径0,1,2,3的次数依次是N0,N1,N2,N3,则:
带隐含变量的MLE
现在我们来考虑这个概率模型:Pr(X,Y;θ)。
只有X是可观察的,Y和θ都是未知的。
经过一组实验,我们观察到X的一组取值x=(x1,x2,...,x l),则联合概率为:
MLE就是要求出最佳的参数θ*,使得:
这个时候要求θ*,”令一阶求函数等于0“的方法已经行不通了,因为有隐含变量Y的存在。
实现上上式很难找到一种解析求法,不过一种迭代的爬山算法可求解该问题。
Expectation Maximization
EM是一种迭代算法,它试图找到一系列的估计参数θ(0),θ(1),θ(2),....使得训练数据的marginal likelihood是不断增加的,即:
算法刚开始的时候θ(0)赋予随机的值,每次迭代经历一个E-Step和一个M-Step,迭代终止条件是θ(i+1)与θ(i)相等或十分相近。
E-Step是在θ(i)已知的情况下计算X=x时Y=y的后验概率:
f(x|X)是一个权值,它表示观测值x在所有观察结果X中出现的频率。
M-Step:
其中在E-Step已经求出来了。
这时候可以用“令一阶导数等于0”的方法求出θ'。
EM算法收敛性的证明需要用到Jensen不等式,这里略去不讲。
举例计算
就拿上文那个3个木桩的滚球实验来说,做了N次实验,滚进3个杯子的次数依次是Na,Nb,Nc。
先给赋予一个随机的值。
E-Step:
同时我们注意到
其它情况下Y的后验概率都为0。
M-Step:
我们只需要计算非0项就可以了
上面的每行第3列和第4列相乘,最后再按行相加,就得到关于θ(i+1)的函数,分别对p0,p1,p2求偏导,令导数为0,可求出p'0,p'1,p'2。
这里补充一个求导公式:
我们这个例子非常简单,计算θ(1)已经是最终的解了,当然你要计算出θ(2)才下此结论。