eCognition基本操作流程
利用eCognition半自动_半人工解译

利用eCognition进行半自动/半人工解译——以道县为例分类系统试验区分类系统如表1所示:表1 道县试验区土地覆盖遥感分类系统eCongnition对中文的识别效果不是很好,因此为了避免因中文名称带来的麻烦以及便于识别,本次分类一律采用拼音类别名称。
0建立工程(1)新建工程选择菜单栏File→NewProject,或点击工具栏的按钮,新建一个工程文件。
图0-1 新建工程(2)加载影像选择需要输入的影像,影像存放的路径不能有中文,双击波段可以更改波段的名称,必须勾选“Use geocoding”(否则,输出的分类结果无投影信息,数据无法拼接)。
利用地理坐标双击可更改波段的名称可插入专题图,参与分类图0-2 加载影像在建立工程(Create Project)的窗口中,如图0-3所示,点击No Data按钮,打开Assign No Data Value窗口,勾选Usesingle value for all layers(union),令背景不参与运算。
图0-3设置背景不参与运算(3)进行波段组合叠加显示影像Edit Image Layer Mixing图0-4设置波段组合显示点击工具栏上的Edit Image Layer Mixing按钮,这里进行标准假彩色合成,然后选择下方的线性拉伸(Linear2%),操作者可以根据自己的个人视觉感受去调试选择不同的显示方式。
1分割分割是面向对象分类软件ecognition里面进行影像分类处理的第一步工作,其目的是按照一定的规则将栅格图像划分为若干对象,划分后的对象即为处理的最小对象。
如果不进行分割,后面的分类及自定义特征值等均不能进行。
本次作业分割的具体步骤为:1.1多尺度分割多尺度分割(multiresolutionsegamentation)界面如下图所示:图1-1 多尺度分割界面图1-1中编号为1、2、3的红框含义是:选择“multiresolution segmentation”算法为分割后层命名设置分割尺度值。
ecognition 试验-多尺度分割形状紧致度参数设置
尺度参数 200
2 能区分水域与陆地,但不能将 浅水坑与裸地区分出来。能区分 不同水质的水域。
3 有可能将裸地,半裸地混合。
尺度:50 尺度:150
尺度:100 尺度:200
尺度:50 尺度:150
尺度:100 尺度:200
尺度:50 尺度:150
尺度:100 尺度:200
结论: 通过改变分割参数进行试验,初步分析结果显示,针对 0.2m 的影像数据,尺度参数(scale) 设置为 50 或者 100、形状参数(shape)设置为 0.1 或者 0.2、紧致度参数(compactness)设置为 0.5 或者 0.6 较合适。最终需要通过分类结果检验尺度参数设置设置是否合理。
紧致度:0.2 紧致度:0.6
紧致度:0.5 紧致度:0.8
在尺度参数和形状参数一定的情况下,紧致度越小,所分割的结果得形状显得越碎。
紧致度:0.2 紧致度:0.6
紧致度:0.5 紧致度:0.8
紧致度:0.2 紧致度:0.6
紧致度:0.5 紧致度:0.8
紧致度:0.2 紧致度:0.6
紧致度:0.5 紧致度:0.8
ecognition 多尺度分割
1 分割
对给定分辨率的影像对象,多尺度分割算法局部最小化影像对象的差异性。它能够在已 存在的影像对象层执行,也能在象素层执行,以创建新的影像对象或者影像对象层。多尺度 分割算法连续 融合象素或者已存在的对象。因此它是基于成对区域融合技术的自底向上分 割算法。多尺度分割是优化处理,对给定数量的影像对象,最小化平均差异性并最大化它所 代表的均一性。分割处理根据以下规则进行,是一种相互最佳适合方法。
尺度参数 定义影像对象结果的加权影像层的均一性 准则的最大标准差,尺度参数值越大,影像 对象结果越大。
eCognition (易康)1软件介绍

软件功能
图斑属性定义--分类
u 基于知识的分类方法 u 多条件类定义分类 u 隶属度函数(模糊)分类 u 分类器分类方法(5种主流方法) u 模板匹配分类方法 u 深度学习分类方法(卷积神经网络)
软件功能
成果优化--规整化
软件功能
点云分析
软件功能
时间维度--变化检测
u 前后期影像变化分析 u 前后期矢量变化分析 u 前期矢量&后期影像变化
− 目标/挑战
− 自动提取建筑轮廓并绘制植被图斑 − 支持城市规划 − 对地图快速更新 − 降低成本缩短工作周期 − 高精准度
基于数字高程模型的LIDAR影像支持的建筑 物及植被提取
农作物识别
项目需求
使用高分辨率偏振SAR数据进行 农作物种植类别分类
数据
E-SAR 分辨率2-3m 波段和极化方式:X-HH, X-VV, CVH, C-VV, L-HH, L-VV, L-HV 右图为RGB组合L-HH, C-W, L-W
eCognition是什么?
技术原理…
易康是什么?
eCognition--信息分析软件,旨在提高,加速和自动化地理空间数据的解译。
地理空间作业流程 ---从影像、点云到GIS的过程
数据获取
数据预处理
信息解译
收集
• 影像数据 • 点云数据
处理
• 几何校正 • 正射校正 • 图像融合 • 高程模型
分析
• HTML 用户界面 • 管理控制台 • 软件开发工具包
易康软件具体分析功能?
易康软件主要功能
软件功能
波段运算 分割 分类 变化检测 成果优化 点云数据处理 手动编辑 标准化分析流程制作 并行运算 矢量数据分析 …
eCognition培训教材
天目创新
5
易康(eCognition)培训教程
小的扩张超出尺度参数 scale parameter 定义的阈值范围,合并过程就停止。 分割的最终目的不是分割。在大多数情况下,遵循相关的均质标准进行
的分割,不像分析方法而言,分割过程中生成的影像对象是影像对象原型,它可 以作为信息的载体和原料用于进一步的分类或者其它分割过程。这样,最佳 的分割结果才可为进一步的处理提供最佳的信息。
1.1 创建一个新工程
在这个教程中,您可以学到: 创建一个工程 导入和排序波段数据 调整视图设置 易康(eCognition)可以导入栅格和矢量数据,当然矢量数据在导入的时候 须先转换成栅格数据。软件支持以下两种基本类型的数据: 影像层 专题层 影像层包含了连续的信息,而专题层包含的信息是离散的。这两种不同 类型的数据在分割和分类中必须区别对待。除了影像层外也可以导入专题层。 易康(eCognition)支持导入以下不同格式的栅格数据: • Arc/Info Binary Grid • ESRI ASCII GRID File (.asc) • Tagged Image File (Geocoded) (.tif) • ER Mapper Compressed Raster (.ecw) • Compuserve GIF (.gif) • Windows or OS/2 Bitmap files (.bmp) • JPEG JFIF (.jpg) • Erdas Imagine Images (.img)
1.多尺度分割
第一章有以下五个教程: 1.1 创建一个新工程 1.2 执行多尺度分割 1.3 创建多重对象层
天目创新
1
易康(eCognition)培训教程
Ecognition 安装使用方法

Ecognition 安装使用方法。
1,首先在小组服务器上/software/专业软件/Ecognition 文件夹下载安装程序。
文件夹里面分别有4个子文件夹,分别是Programme setup是程序安装程序,Document是相关帮助文档,sample data是培训练习数据,whatsNewProf_5是5.0的更新部分介绍。
2,打开安装程序文件夹中programme setup文件夹,单击setup.exe,安装客户端ecognition。
3,程序安装完成后,直接运行程序,确定是否可以打开使用。
(一般2楼的机器可以直接使用)
如果是非2楼的机器,可能得设置下列步骤。
请打开Hardlock Utility,
图1
选择Generate Report 下面的Floating hardlock, 打开Advanced Settings,设置Sever IP-Addres 为192.168.3.23。
如下图,单击OK。
图2
然后单击图1界面中的create 按钮,如果上面显示如下图所示信息,证明licence已经通过可以正常使用。
可以退出设置,直接打开程序进行使用。
图3
4,如果完全满足上述情况而还是提示无法打开,则右键单击我的电脑,进入环境变量中,设置变量(如图4中亮显的部分一样)
图4。
eCognition基本操作流程

eCognition基本操作流程一、基本流程影像分类输出分类结果特征选择和特征视图影像分割二、实例演示(一)新建工程打开易康软件后,会提示两种模式,一种是【Quick Map Mode】,称之为快速制图模式,另一种是【Rule Set Mode】,称之为规则开发模式。
前者主要针对于临时使用软件和基于样本影像分析的用户,能够极大地简化工作流程如一些面向对象影像分析基本步骤的限制,但是提供的功能有限,而且不能建立规则集;因此这里选择规则开发模式,如图所示。
点击【OK】后进入软件的主界面,如下图所示红色边框里是四种视图类型,这里选中的是第四种【Developer Rulesets】点击【Create New Project】,弹出如下图所示的界面,选择需要处理的遥感影像:选中影像后点击【OK】,用户将能看到【Create Project】对话框,在该对话框中【Project Name】使用英文名称命名工程,【Map】里能够看到当前打开的影像的坐标系统、空间分辨率、影像大小等信息,【Map】下面显示的是影像波段的别名【Image Layer Alias】、位置等信息,然后再往下【Thematic Layer Alias】用于插入一些辅助分类的专题数据,例如我们常用的矢量数据。
我们可以将整幅影像加载进来,也可以只处理一部分影像,这时需要点击【Subset Selection】,然后会弹出对话框,可以用鼠标对感兴趣的区域进行框选。
这里我们默认将整幅影像导入到易康中,如果你想对已经新建立的工程进行一些修改,例如再导入其他波段或影像,可以点击【File】-【Modify OpenObject】。
工程建立好后如下图所示:建立好工程后,可以改变影像的显示方式,包括波段组合和影像缩放操作,如图所示为易康提供的影像显示的工具栏,红色边框选中的工具为编辑波段组合,该工具前面的四种工具是各种波段组合显示的快捷工具,例如第一个是单波段显示即灰度显示,第二个是按顺序给定三种波段组合显示效果,第三个是前一种波段组合显示效果,第四个是后一种波段组合显示效果。
(完整版)eCognition基本操作流程

eCognition基本操作流程一、基本流程影像分割→特征选择和特征视图→影像分类→输出分类结果二、实例演示(一)新建工程打开易康软件后,会提示两种模式,一种是【Quick Map Mode】,称之为快速制图模式,另一种是【Rule Set Mode】,称之为规则开发模式。
前者主要针对于临时使用软件和基于样本影像分析的用户,能够极大地简化工作流程如一些面向对象影像分析基本步骤的限制,但是提供的功能有限,而且不能建立规则集;因此这里选择规则开发模式,如图所示。
点击【OK】后进入软件的主界面,如下图所示红色边框里是四种视图类型,这里选中的是第四种【Developer Rulesets】点击【Create New Project】,弹出如下图所示的界面,选择需要处理的遥感影像:选中影像后点击【OK】,用户将能看到【Create Project】对话框,在该对话框中【Project Name】使用英文名称命名工程,【Map】里能够看到当前打开的影像的坐标系统、空间分辨率、影像大小等信息,【Map】下面显示的是影像波段的别名【Image Layer Alias】、位置等信息,然后再往下【Thematic Layer Alias】用于插入一些辅助分类的专题数据,例如我们常用的矢量数据。
我们可以将整幅影像加载进来,也可以只处理一部分影像,这时需要点击【Subset Selection】,然后会弹出对话框,可以用鼠标对感兴趣的区域进行框选。
这里我们默认将整幅影像导入到易康中,如果你想对已经新建立的工程进行一些修改,例如再导入其他波段或影像,可以点击【File】-【Modify Open Object】。
工程建立好后如下图所示:建立好工程后,可以改变影像的显示方式,包括波段组合和影像缩放操作,如图所示为易康提供的影像显示的工具栏,红色边框选中的工具为编辑波段组合,该工具前面的四种工具是各种波段组合显示的快捷工具,例如第一个是单波段显示即灰度显示,第二个是按顺序给定三种波段组合显示效果,第三个是前一种波段组合显示效果,第四个是后一种波段组合显示效果。
遥感影像分析之eCognitionDeveloper使用说明

遥感影像分析之eCognitionDeveloper使⽤说明eCognition DevelopereCognition的基础eCognition Developer是⼀个强⼤的⾯向对象的影像分析开发环境。
它⽤来在地球科学领域开发规则集(或为eCognition Architect开发应⽤程序)以做到遥感数据的⾃动分析。
特点与优点1.优良的⾯向对象的影像分析⼯具和算法的集合2.分析栅格、⽮量和点云数据3.两种启动模式——快速使⽤的QuickMap模式与传统的Developer模式4.直观的开发环境5.从单⼀的桌⾯版扩展到企业产品⼯作流程6.软件开发⼯具包(SDK)7.在线访问规则集资源产品亮点优良的⾯向对象的影像分析⼯具和算法针对图像分析的不同⽅⾯,Definiens Developer提供了⼀个全⾯的算法集合。
⽤户能从各种分割算法中进⾏选择,如多分辨率分割、四义树分割或棋盘分割。
分类算法的范围包括基于采样的最邻近法、模糊逻辑⾪属函数或专门上下⽂驱动分析。
层操作算法允许应⽤⾯对象元的过滤器,如坡度、坡向、边缘提取或⽤户⾃定义的层计数。
直观的开发环境图形⽤户界⾯灵活地显⽰了任何影像数据源。
简单的拖放功能,能够让那些没有任何编程技能的⽤户为标准化分析进⾏快速开发规则集和应⽤软件。
即使是最⾼级的任务,⾼级⽤户也能利⽤强⼤的⼯具来解决。
⾃动化和⽣产在eCognition Architect中建⽴⼀个应⽤程序后,它可以被存储,并能扩展eCognition Server功能,并适⽤于⼤量的图像。
通过⾯向服务架构提供⼴泛的可扩展性时,这能够使图像分析过程完全⾃动化。
软件开发⼯具包(SDK)内置的SDK允许通过添加算法、对象特征以及数据驱动程序等扩展Definiens Developer的核⼼能⼒。
因此,⾃定义分割、分类、层操作或对象特征就可以添加到软件当中。
eCognition Developer是如何⼯作的?在数据加载步骤中,数据能以任意组合的⽅式导⼊。
eCognition操作流程

Definiens professional 5.0分类流程1.1操作前准备1.1.1待分类影像切割eCognition不支持超过500万个对象的文件分割,因此需要在eCognition分割前要先将遥感影像切割成200M左右的小文件。
为保证切割后影像分类后结果的无缝镶嵌,在Arcmap中制作切割用的矢量边界,然后转至ERDAS中制作所需要的aoi。
1.1.2辅助图层准备用与上步相同的aoi 文件对相应的dem、坡度、坡向图等专题图层进行切割,这些文件在eCognition分类中都将作为辅助信息用到。
1.2 建立eCognition工程文件1.2.1加入影像层和各专题图层打开eCognition软件,创建新的工程文件。
先加入第一步做好的遥感影像文件,然后将dem、坡度、坡向图等专题图层都加入进来。
1.2.2影像层赋别名为方便分类中使用,需要将各个图层赋上别名,按加入图层的先后顺序,确保给各图层加上正确的名称(Green、Red、Nired、Swired、Pan、Dem、Slope、Aspect )等。
1.2.3图层设臵先在Erdas中查看相应文件信息(information),记下文件的左上角的x值和右下角的y值及分辨率。
然后在eCognition中双击相应图层,在弹出的如下对话框中分别输入刚才记下的x、y和分辨率。
为了确保输入坐标正确,在各图层都输入后,进行检查。
工程文件创建后,就不能再进行更改这些数据了。
1.2.4创建新的工程文件:点“OK”开始创建工程文件,完成后应先保存该工程文件,再开始下步的工作。
1.3 影像分割面向对象的影像分类方法需要在影像分类之前对其进行分割,分割方法将像元按照同质性进行聚类,从而形成分类所需要的“对象”。
1.3.1分割对象选择只选择遥感影像的1、2、3、4层,即兰、绿、红、近红四个波段参与分割,其它层不参与分割。
即在分割时将兰、绿、红、近红四个波段权重值设为1,将其它层权重值设为0。
eCognition中的分割与分类方法研究
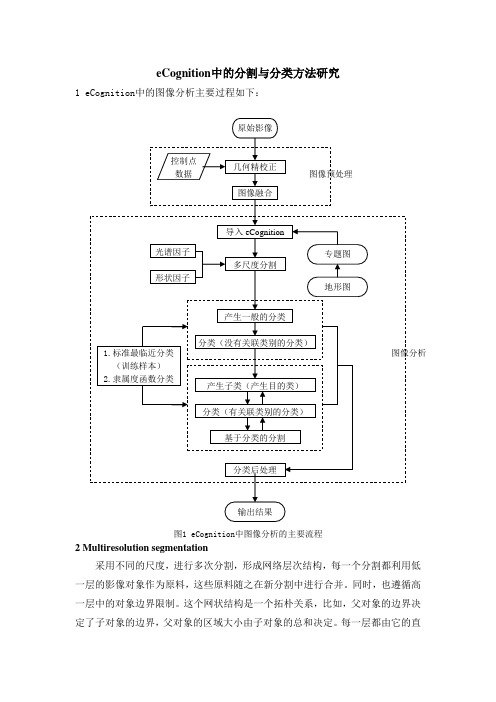
eCognition中的分割与分类方法研究1 eCognition中的图像分析主要过程如下:图1 eCognition中图像分析的主要流程2 Multiresolution segmentation采用不同的尺度,进行多次分割,形成网络层次结构,每一个分割都利用低一层的影像对象作为原料,这些原料随之在新分割中进行合并。
同时,也遵循高一层中的对象边界限制。
这个网状结构是一个拓朴关系,比如,父对象的边界决定了子对象的边界,父对象的区域大小由子对象的总和决定。
每一层都由它的直接的子对象来构成,在下一个高层上,子对象合并为大对象。
这个合并会被已有父对象的边界所限制。
如果是不同的父对象,那么相邻的对象不能进行合并。
图2 影像多尺度分割的网络层次结构从一个单个像元开始,分别与其相邻对象进行计算,若相邻的两个对象和合并后的异质性指标小于给定的域值,则合并,否则不进行合并。
当一轮合并结束后,以上一轮生成的对象为基本单元,继续分别与它的相邻对象进行计算,这一过程将一直持续到在用户指定的尺度上已经不能再进行任何对象的合并为止。
3 Computation of the heterogeneity criterion1)对象的光谱(spectral)异质性指标color h :∑•=cc c color w h σ (1)其中c ω为图层的权重,c σ为图层的标准差,c 为图层数;根据不同的影像特性以及目标区域(interest object)特性,图层间的权重调配亦有所不同,可依使用的需求加以调整。
2)对象的形状(spatial)异质性指标shape h :s compactnes compatness smoothness smoothness shape h h h ⨯+⨯=ωω (2)其中形状的异质性指标是由平滑(smoothness)与紧密(compactness)这两个子异质性指标所构成,smoothness ω与s compactnes ω代表两者间的权重调配,两者的和为1;平滑指标与紧密指标计算如下式所示:(3)(4) 其中,l 为对象的实际边长,b 为对象的最短边长,n 为对象面积;若平滑指标⎪⎪⎭⎫⎝⎛⨯+⨯-⨯=222111Obj Obj Obj Obj Obj Obj Merge Merge Merge smoothnessb l n b l n b l n h ⎪⎪⎭⎫ ⎝⎛⨯+⨯-⨯=222111Obj Obj Obj Obj Obj Obj Merge MergeMerge s compactnes n l n n l n n l n h的权重较高,分割后的对象边界较为平滑,反之,若紧密指标的权重较高,分割后的对象形状较为紧密较接近矩形,根据不同的影像特性以及目标对象(interest object )特性,两者间的权重调配亦有所不同,可依使用者的需求加以调整。
易康操作指南

eCognition实例1.1、TM影像的分类在这个练习中,您将会运用一种基于TM影像数据的最近邻域的分类方法。
在这一练习中,您将学会:z怎样装载和显示栅格图像;z运行一种图像分割;z建立一种简单的分类层次;z在图像分类描述中插入最近邻域分类器;z进行分类;1.1.1导入栅格图像1、运行eCognition,从“File”菜单中选择New Project...2、浏览目录”\data\orangecounty\”,通过按住Shift键同时选择五张位图,然后打开。
3、点击“OK”导入栅格图层导新工程中,显示如下视图。
1.1.2创建图像对象1、在“Process Tree”面板中点击鼠标右键,选择选择“Append New”。
2、“Algorithm”中选择“Segmentation->multi-resolution segmentation”3、编辑分割指数。
4、点击“Execute”。
5、利用“View Settings”对话框显示分割完后的图像,可以显示原始图像,也可以用对象均值显示。
现在已经建立了一个简单的包括图像对象图层的体系。
从每一个图像对象中我们可以得到大量可用于图像分类的信息。
1.1.3通过分类体系创建知识库1、从 “Classification”菜单中选择“Class Hierarchy...”。
在这一练习中图像将会分为四类:impervious surface,water,agriculture和rural.首先要做的是确定每一类的名称和颜色。
2、选择“Classification->Edit Classes-〉Insert Class”或者在此窗口点击鼠标右键,选择“Insert Class”,生成impervious surface, water, agriculture和rural四类。
1.1.4插入分类器这个练习是利用最邻近域分类方法。
当你在类描述中插入标准最近邻域分类器之前,要定义特征空间,在特征空间中图像对象之间的距离将会被计算。
ecognition遥感解译流程

ecognition遥感解译流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!深入理解:ECognition遥感解译流程遥感技术,尤其是基于ECognition软件的遥感解译,已经在地理信息系统、环境监测、城市规划等领域发挥着重要作用。
2019年Econfig使用手册很详细

IBM-econfig的安装、升级、删除和使用一,安装1,打开下载JRE,IBM推荐的JRE版本是1.4.2。
安装后重新启动计算机(必须)。
2,点击下载e-padm,安装后同样重新启动计算机(必须)。
3,打开输入用户名和密码后单击sign in选择其中一个USER再选择Mobile Edition(如果你的浏览器使用了窗口阻拦的功能,请在这一步之前将其关闭)新页面如下:图一此处对于个人来说不用进行更改,单击Continue后等待3分钟左右,将看到类似如下的界面:图二此时可以选择想要安装的项,对于我们来说一般选择如下几项:Required Base Packages(必须的)POWER SystemsPSeries and RS/6000 SystemsStorage也可根据实际情况多选或少选在选择时单击每一项前的图标,展开子项,确保要安装项的所有子项前都已经打勾,其中在Required Base Packages的Geography CPF 选择Asia Pacific .选择好后单击Install/Update,,按照提示选择安装路径,确定后开始安装e-config,,安装时间一般会在5个小时以上。
在安装过程中千万不要关团安装窗口。
安装完成后,点击OK,并重新启动计算机(必须)二,升级和删除升级、删除的步骤和安装的步骤非常相似,从步骤3开始,当出现图二的界面时:1,果是升级选择要升级的项后点击Install/Update即可(升级一般一个星期一次);2,如果是删除则点击Uninstall,按照提示删除。
对于删除也可以通过e-config的文件夹中的uninstall图标和操作系统中的控制面板中的添加删除程序来完成。
三,使用安装好e-config后,一般会中桌面上有一个e-config文件夹,打开后双击eConfig图标,启动后出现如下界面:图三单击OK在如下窗口中单击Leave Blank图四图五在图五中的左边栏中右击Customer,在出现的菜单中选择Add Initial Order后出现如下对话框:图六在图六中选择pSeries and RS/6000 Systems(US English),单击OK。
eCognition8.9面向对象分类详细步骤
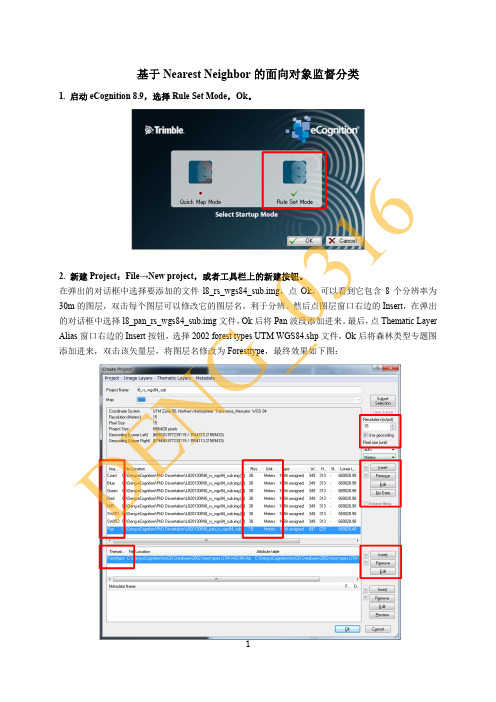
基于Nearest Neighbor 的面向对象监督分类1. 启动eCognition 8.9,选择Rule Set Mode ,Ok 。
2. 新建Project :File →New project ,或者工具栏上的新建按钮。
在弹出的对话框中选择要添加的文件l8_rs_wgs84_sub.img ,点Ok ,可以看到它包含8个分辨率为30m 的图层,双击每个图层可以修改它的图层名,利于分辨。
然后点图层窗口右边的Insert ,在弹出的对话框中选择l8_pan_rs_wgs84_sub.img 文件,Ok 后将Pan 波段添加进来。
最后,点Thematic Layer Alias 窗口右边的Insert 按钮,选择2002 forest types UTM WGS84.shp 文件,Ok 后将森林类型专题图添加进来,双击该矢量层,将图层名修改为Foresttype ,最终效果如下图:D E NG _0316Project Name 等按默认,点Ok ,回到主界面,图像按前3个波段RGB 显示,如下图:为了更好的辨别地物类型,点击工具栏上的图层显示编辑按钮,在弹出的对话框中点击修改RGB 为NIR ,Green ,Blue 显示:D E N G _0316如果取消勾选左下角No layer weights ,还可以设置不同波段的比重,在调整不同波段的比重时,在数值上左击鼠标增加比重,右击鼠标减少比重,如下图:点Ok 进行波段显示调整后的效果如下,然后保存这个Project 为l8_rs_wgs84_sub.dpr 。
D E N G _03163. 将图像分解为基本对象:首先,在Process Tree 窗口(如果没有,菜单栏View →Windows →Process Tree 调出),右击,选择Append New ,将Name 改为Segmentation ,其他按默认,然后点击Ok :其次,在Process Tree 窗口,右击Segmentation 这个新建规则(Rule),选Insert Child(插入子规则),Name 勾选自动,Algorithm 下拉菜单选择multiresolution segmentation (最常用的分割算法),在右边的参数窗口,找到Scale parameter 并将其设置为150,其他默认,然后点Execute(立即实行)或者Ok(稍后实行)。
易康简单操作解析
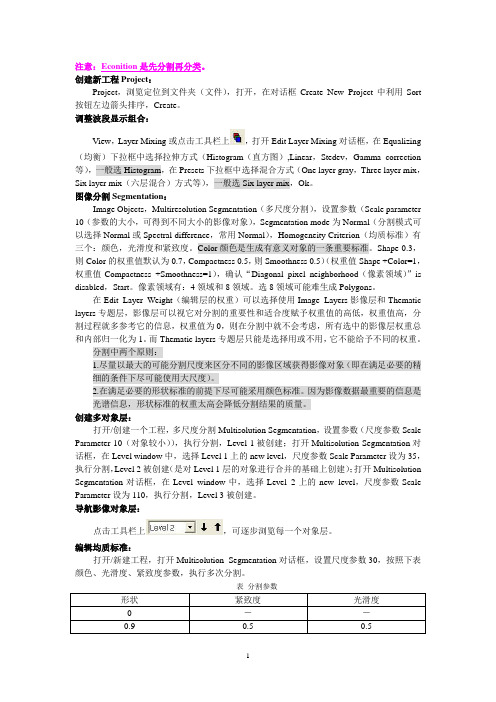
注意:Econition是先分割再分类。
创建新工程Project:Project,浏览定位到文件夹(文件),打开,在对话框Create New Project中利用Sort 按钮左边箭头排序,Create。
调整波段显示组合:View,Layer Mixing或点击工具栏上,打开Edit Layer Mixing对话框,在Equalizing (均衡)下拉框中选择拉伸方式(Histogram(直方图),Linear,Stedev,Gamma correction 等),一般选Histogram,在Presets下拉框中选择混合方式(One layer gray,Three layer mix,Six layer mix(六层混合)方式等),一般选Six layer mix,Ok。
图像分割Segmentation:Image Objects,Multiresolution Segmentation(多尺度分割),设置参数(Scale parameter 10(参数的大小,可得到不同大小的影像对象),Segmentation mode为Normal(分割模式可以选择Normal或Spectral difference,常用Normal),Homogeneity Criterion(均质标准)有三个:颜色,光滑度和紧致度。
Color颜色是生成有意义对象的一条重要标准。
Shape 0.3,则Color的权重值默认为0.7,Compactness 0.5,则Smoothness 0.5)(权重值Shape +Color=1,权重值Compactness +Smoothness=1),确认“Diagonal pixel neighborhood(像素领域)”is disabled,Start。
像素领域有:4领域和8领域。
选8领域可能难生成Polygons。
在Edit Layer Weight(编辑层的权重)可以选择使用Image Layers影像层和Thematic layers专题层,影像层可以视它对分割的重要性和适合度赋予权重值的高低,权重值高,分割过程就多参考它的信息,权重值为0,则在分割中就不会考虑,所有选中的影像层权重总和内部归一化为1。
正射纠正快鸟数据的流程
正射纠正快鸟数据的流程pci正射纠正快鸟数据,有两种纠正方式:一、精纠正模型;二、rpc参数模型纠正。
他们操作的流程分别如下:一、精纠正模型:1、工程的设置。
在Orthoengine里,点击new,新建一个工程文件。
在弹出的对话框里设置好各种参数,选择卫星轨道模型,然后选择toutin`s model。
进一步再设置工程项目和控制点的投影参数,椭球参数等信息,如下图:2、输入快鸟数据。
精纠正模型只能处理快鸟的basic product level1B产品,矫正过的standard不能处理。
快鸟数据可以Geotiff|、NITF2.0、NITF2.1三种格式发送。
同时提供支持的参数文件。
ATT、EPH、GEO、IMD、RPB 和TIL.根据提供的数据介质的不同,选择不同的数据输入方式。
下边是存储介质为CD_ROM.的数据输入对话框图:3、控制点的采集选择GCP/TP采集处理步骤。
在这里,可以选择多种控制点获取的原数据。
例如,矢量图,纠正后的影像等。
当要处理多张影像的时候,需要采集连接点。
界面如下图:对于快鸟的精纠正模型,每张影像至少需要6个精确的控制点。
选择完控制点以后,运行模型计算(model calculation)4、生成正摄影像最后的一步就是生成正射影像,点击generating orthos.弹出对话框,设置参数,必须设置正射纠正所用到的DEM数据文件。
设置好参数以后,点击generating orthos即可,如下图:二、RPC(Rational Polynomial Coefficients)纠正当获取快鸟数据,并具备RPCs参数的时候,可以在没有控制点的条件下,进行正射纠正。
但RPC模型会受其他因素的影响而变化,如地形等,并且,其结果的精度没有精校正模型的精度高。
在有多与6个控制点的情况下,推荐用精纠正模型。
RPC模型和精纠正模型相似。
主要的区别是在工程的设置和数据的输入上。
1、工程设置开始一个新工程,在弹出的对话框中选择Rational Functions。
ENVI影像拼接裁剪

一、无缝拼接E N V I1.通过open打开要拼接的两幅影像;2.然后在Toolbox/Mosaicking/SeamlessMosaic,会出现SeamlessMosaic下面的对话框:3.通过上述对话框左上角的加号+选择要拼接的两幅影像,点击OK:4.进行匀色操作:在匀色ColorCorrection操作中,勾选预览ShowPreview;勾选HistogramMatching,此时自行选择HistogramMatching勾选预览ShowPreview;勾选HistogramMatching,此时自行选择HistogramMatching;5.羽化处理:选择Seamlines点击AutoGenerateSeamlines进行自动羽化,如果羽化结果颜色基本一致,则导出结果即可6.导出结果:在Export中选择输出形式及输出位置,点击finish,拼接完成;二、矢量裁剪ArcGIS+ENVI1已知全国矢量图,在ArcGIS中提取出北京市的矢量边界图:1.在ArcGIS中打开全国范围的矢量图,与被裁剪的影像进行对比,查看其投影系及显示方式是否一致:2.不一致,先把全国矢量图的十进制形式转化为度分秒形式:视图/数据框属性或鼠标在图像显示区域右击选择数据框属性,并在弹出的对话框中将十进制转化为度分秒形式,其弹出数据框属性对话框如下:3.提取北京市的矢量边界图:编辑器/开始编辑,鼠标点击要去除的边界,通过删除键进行删除,最后只剩下北京市的边界图;4.导出北京市边界图:ArcTool/转换工具/转为Shapefile/要素类转Shapefile,在弹出的对话框中选择要转换的文件及输出地址,点击确定;2利用北京市边界图进行裁剪1.将上述结果北京市矢量边界图导入ENVI中;2.Toolbox/Rastermanagement/Masking/buildmask,选择需要做掩膜的影像就是被裁剪影像,点击OK,弹出掩膜定义对话框,点击Options的下拉菜单,在出现的子菜单中选择Import EVFS,则弹出右下图,再选择矢量边界图,点击OK;3.此时弹出SelectDataFileAssociatedwithEVFs对话框,选中需要裁剪的影像,点击OK4.此时回到掩膜定义对话框,设置输出结果的位置,此时的影像被掩膜区域外,其他区域全是黑色;5.Toolbox/rastermanagement/masking/Applymask,弹出应用掩膜对话框,选择需要裁剪的影像,并在SelectMaskBand中选择刚才建立的掩膜文件,点击OK,再点击OK,在弹出的对话框中输入输出结果的位置;裁剪完成;3修改背景颜色为白色1.Rastermanagement/EditENVIHeader/选择影像,点击OK;2.在上述对话框中点击EditAttributes/DataIgnorevalue/ok即可修改背景颜色为白色;三、影像分割分类eCognition1多尺度分割1.打开裁剪后的影像:File/NewProject,然后选择要打开的影像,弹出CreateProjiect对话框2.分割流程:在工具条附近右击选择processtree,弹出流程框,在此框中右击新的进程AppendNew,在弹出的对话框中修改标签名,点击OK;3.此时,在ProcessTree中右键单击选择InsertChild,在出现的对话框中选择具体的分割规则,然后点击运行;2面向对象法分类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
eCognition基本操作流程
一、基本流程
影像分割特征选择和特征视图影像分类输出分类结果
二、实例演示
(一)新建工程
打开易康软件后,会提示两种模式,一种是【Quick Map Mode】,称之为快速制图模式,另一种是【Rule Set Mode】,称之为规则开发模式。
前者主要针对于临时使用软件和基于样本影像分析的用户,能够极大地简化工作流程如一些面向对象影像分析基本步骤的限制,但是提供的功能有限,而且不能建立规则集;因此这里选择规则开发模式,如图所示。
点击【OK】后进入软件的主界面,如下图所示红色边框里是四种视图类型,这里选中的是第四种【Developer Rulesets】
点击【Create New Project】,弹出如下图所示的界面,选择需要处理的遥感
影像:
选中影像后点击【OK】,用户将能看到【Create Project】对话框,在该对话框中【Project Name】使用英文名称命名工程,【Map】里能够看到当前打开的影像的坐标系统、空间分辨率、影像大小等信息,【Map】下面显示的是影像波段的别名【Image Layer Alias】、位置等信息,然后再往下【Thematic Layer Alias】用于插入一些辅助分类的专题数据,例如我们常用的矢量数据。
我们可以将整幅影像加载进来,也可以只处理一部分影像,这时需要点击【Subset Selection】,然后会弹出对话框,可以用鼠标对感兴趣的区域进行框选。
这里我们默认将整幅影像导入到易康中,如果你想对已经新建立的工程进行一些修改,例如再导入其他波段或影像,可以点击【File】-【Modify Open Object】。
工程建立好后如下图所示:
建立好工程后,可以改变影像的显示方式,包括波段组合和影像缩放操作,如图所示为易康提供的影像显示的工具栏,红色边框选中的工具为编辑波段组合,该工具前面的四种工具是各种波段组合显示的快捷工具,例如第一个是单波段显示即灰度显示,第二个是按顺序给定三种波段组合显示效果,第三个是前一种波段组合显示效果,第四个是后一种波段组合显示效果。
红色边框选中工具后面的图标就不再详述,分别是鼠标选择、鼠标漫游、鼠标缩放、缩小、放大、视图比例和全幅显示。
如图所示为影像显示的波段组合编辑对话框,这里用户可以定义影像显示的方式(真彩色、假彩色)和影像初始显示设置(如线性拉伸设置等)
(二)影像分割
在主界面右边的【Process Tree】里,右键然后选择【Apeend New】,在弹出的【Edit Process】对话框里,如图红色边框设置,然后点击【OK】,在【Process Tree】里会出现"Segmentation"这一条规则(当做处理流程的标签)
此时选中Segmentation,然后右键选择【Insert Child】,也会弹出【Edit Process】对话框,此时可以添加具体的分割规则,例如选择的分割算法、分割的参数设置信息等,这里我们使用的是多尺度分割的方式,即在【execute child processes】下面找到【Segmentation】算法里面的【multiresolution segmentation】这里将分割尺度设置为100。
此时,如果点击【OK]的话,将不会执行规则,
而仅仅是在【Process Tree】添加了一条规则标签而已,因此需要点击【Execute】来执行分割这条规则,此时【Process Tree】和主界面会发生变化。
此时我们可以利用工具栏上的【Show or Hide Outlines】来控制分割边界是
否显示;
此时可以利用多个视图来显示分割前后的影像,选择【Window】菜单下的【Split】、【Split Horizonally】、【Split Vertically】这三种功能,来设置影像的显示方式,例如这里选择【Split Vertically】,显示效果如图所示,这种显示
方式两个窗口之间是独立的,因此是【Independent View】;如果两个窗口之间分割对象是联动显示的,那么是【Side by Side View】。
(三)特征视图与特征计算
易康的【Feature View】提供了大量的特征。
这里结合使用的实验数据,简单选择几种特征进行介绍。
如图所示,这里双击【Mean】特征下的“Layer 5”,表示计算的是影像近红外波段的均值。
双击之后取消选中【Show or Hide Outlines】,那么主界面将会显示特征视图,如图所示,白色的表示特征值较大的对象,黑色的表示特征值较小的对象。
结合实验影像中的地类,黑色的区域主要类别是水体,白色区域主要类别是植被,而建筑物则介于中间。
任意选中一个对象,在【Image Object Information】里显示该对象对应的特征信息,这里显示的特征信息,可以通过在【Image Object Information】里右键选择【Select Features to Display】来编辑,如图中所示这里只选择了对"Layer 5"即近红外波段的均值进行显示,如红色边框选中的两个地方。
以上介绍的只是查询一个分割对象的特征信息,我们在分类的时候需要明确某一个类别的特征值的取值范围,这样才能够建立一条类别提取的规则。
那么这时候就需要利用到【Feature View】中的查看范围特征值的功能,如图中下面的绿色边框选中的区域。
在利用范围特征值显示之前,以实验影像中的植被为例,我们需要首先来估计一下植被的近红外波段均值的取值范围,这时我们可以在影像中点击一些分割后的植被对象,来查看它们对应的近红外波段均值,然后将最大值和最小值记录下来,作为我们判断植被的一个初始的阈值范围。
比如这里这些植被对象的最小近红外波段均值为18800。
判断完毕后,此时呢可以选中【Feature View】里最下面的特征范围,然后输入特征的最小值(左)和最大值(右),如下图中红色边框选中的区域,符合这一阈值范围的对象呈现出蓝色和绿色。
此时对照多波段影像和被选出的区域,那么就能够很明显的看出类别的特征范围是不是准确;当然如果此时觉得特征范围需要修改,那么继续修改右下角【Feature View】的阈值范围直到结果满意为止,记下最小值最为分类植被的规则。
得到植被分类的规则后,开始选取水体的分类规则。
这里需要用到的是自定义特征的使用,用以区分水体的归一化差异水体指数NDWI,其计算公式为NDWI=(G-Nir)/(G+Nir),在【Feature View】里选择【Customized】的“Create new 'Arithmetic Feature”,弹出自定义特征编辑的对话框,如下图所示编辑NDWI的计算公式。
重复选取规则的步骤直到选取出符合水体分类规则,比如这里的NDWI 最小值为-0.06.
(四)分类
在分类之前首先我们要明确目标,即针对当前影像建立类别体系,在【Class Hierarchy】界面右键然后选择【Insert Class】,在弹出的【Class Description】对话框里设置类别的名称和颜色,这里的类别名称使用英文。
如图所示,将实验影像中的类别定义为vegetation(植被)、water(水体)和others(其他)。
在上文中已经建立了三种类别的提取规则,当然这只是一种简单的试验,一个类别的精确提取往往需要多条规则、多个特征的综合。
此时在【Process Tree】界面里添加一条名规则,内容为"Classification",也可以理解为父进程,但是它仅作为一个标签,和"Segmentation"类似。
在这里请注意Process Tree的逻辑顺序,Classification与Segmentation是同等的父进程,请不要将Classification作为Segmentation的子进程插入。
前文已选取好的分类规则:(1)植被提取的规则:近红外波段均值>18800;(2)水体提取的规则:归一化差异水体指数>-0.06;(3)其他的规则:剩余的未分类对象归为该类。
右键"Classification"选择【Insert Child】,为vegetation类别建立提取规则,具体的参数设置界面如下图所示:
设置完毕后点击【Execute】,会发现影像中分割边界的颜色会有部分变成vegetation类别的颜色,取消选中【Show or Hide Outlines】,点击【View Classification】则会出现vegetation类别的提取结果,如图所示。
按照同样的方式,分别添加water和others两个类别的提取规则并且执行,需要注意的是最后将剩余的未分类对象赋给others类别时,【Threshold condition】不需要设置任何条件.
最终的分类规则集和分类结果如图所示:
(五)分类结果输出
将分类结果导出为矢量数据(shp)在ArcGIS中打开,需要注意的是在输出的特征集里只有选择了类别名称这一特征,矢量数据的属性表里才会有对应的类别字段.。