步科伺服编程软件基础培训
Kinco伺服产品技术交流分享(基础篇)

物流行业营销部
01 如何让电机转起来?
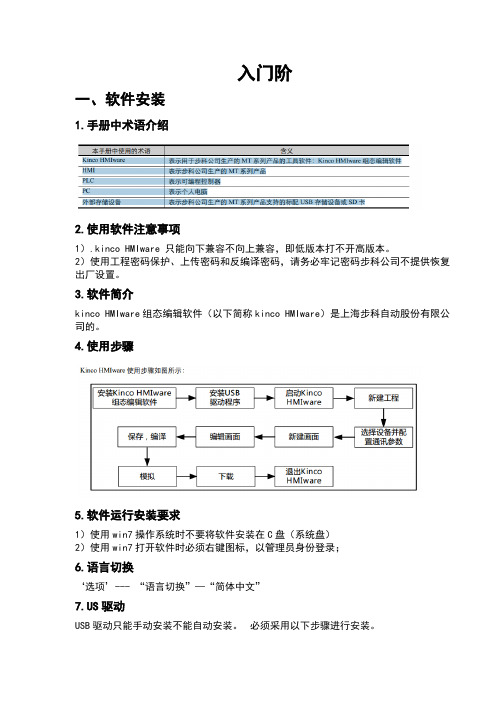
1.接线-FD1X3-CA
CAN接口
必须接 CAN终端电阻拨码 编码器接口
232调试口
动力线接口
图中由左往右:DC+、DC-、NC、RB+、RB-、U、V、W、PE
根据需求 CAN ID拨码 232调试口
CAN接口
IO接口
1.速度模式
-3 立即速度模式 3 速度模式
相关参数: 工作模式:-3/3 目标速度: 梯形加/减速度: 控制字:F/6
2.位置模式
1 位置模式 相关参数:
工作模式:1 梯形速度: 梯形加/减速度: 目标位置: 控制字:
6/F→103F 根据目标位置变化 立即绝对定位
6/2F→3F 绝对位置 6/4F→5F 相对位置
CAN地
IO口
引脚 1 2 3 4 5 6
7 8~ 10 11
12
名称 PUL+ PULDIR+ DIROUT1 OUT2/ BR+ COMI IN1~ IN3 IN4/ BRCOMO
功能 脉冲输入
信号输出端 信号输出端
/抱闸 输入公共端 信号输入端
信号输入端 /抱闸
输出公共端
备注:当电机需要制动(急停)或外部动力带动电机高速旋转情况下需要通过RB-,RB+外接制动电阻
4.设置参数
1.打开“驱动器D→基本操 作” 2.将“工作模式”写入3 3.将“目标速度”写入100 4.将“控制字”写入F,此 时电机就转起来了 5.若需要电机停止,只需 将“控制字”改为6即可
02 模式控制
工作模式
-4 脉冲模式 -3 立即速度模式 4 力矩模式 1 位置模式 3 速度模式 6 找原点模式 7 插补模式
步科编程软件使用手册

..入门阶一、软件安装1.手册中术语介绍2.使用软件注意事项1).kinco HMIware 只能向下兼容不向上兼容,即低版本打不开高版本。
2)使用工程密码保护、上传密码和反编译密码,请务必牢记密码步科公司不提供恢复出厂设置。
3.软件简介kinco HMIware组态编辑软件(以下简称kinco HMIware)是上海步科自动股份有限公司的。
4.使用步骤5.软件运行安装要求1)使用win7操作系统时不要将软件安装在C盘(系统盘)2)使用win7打开软件时必须右键图标,以管理员身份登录;.资料Word..6.语言切换‘选项'--- “语言切换”—“简体中文”驱动USB驱动只能手动安装不能自动安装。
必须采用以下步骤进行安装。
1)用USB连接触摸屏USB口与电脑USB口;2)PC弹出“硬件更新向导”---从列表或制定位置安装—下一步---单机浏览---kincoware中的drive 驱动。
二、制作工程1.新建工程2.在通讯连接中选择设备的通讯方式从元件窗口拖拽通讯方式:(客户要求我们的设备是要走以太网的)。
所以根据IP分配,触摸屏地址为(192.168.1.143).资料Word..PLC选择、触摸屏(全部在左侧元件列表中寻找)3.4.通讯连接5.触摸屏组态画面设计.资料Word..6.更改背景属性颜色1.在当前页面空白处双击—弹出窗口属性对话框—更改背景颜色---选择自定义颜色7.添加文字.资料Word..8.打开非kinco DTOOLs制作的工程打开KINCO HMIWARE的工程,方法如下图,不是所有的kinco HMIware 文件都能打开进阶篇1.用户界面介绍.资料Word..2.工具栏介绍.资料Word..2.1 元件视图:在“plc 元件列表”的空白处右键鼠标,可以进行大\小图标的切换。
.资料Word..小图标2.2工程结构窗口2.3有时为了方便查看自己的触摸屏到底使用了哪些软元件:可以在:“查看—元件列表”.资料Word..设计方法画面切换:是当前窗口画面(或已经打开的子窗口)关闭,并打开另一个指定的窗口。
步科编程软件使用手册
入门阶一、软件安装1.手册中术语介绍2.使用软件注意事项1).kinco HMIware 只能向下兼容不向上兼容,即低版本打不开高版本。
2)使用工程密码保护、上传密码和反编译密码,请务必牢记密码步科公司不提供恢复出厂设置。
3.软件简介kinco HMIware组态编辑软件(以下简称kinco HMIware)是上海步科自动股份有限公司的。
4.使用步骤5.软件运行安装要求1)使用win7操作系统时不要将软件安装在C盘(系统盘)2)使用win7打开软件时必须右键图标,以管理员身份登录;6.语言切换‘选项’--- “语言切换”—“简体中文”驱动USB驱动只能手动安装不能自动安装。
必须采用以下步骤进行安装。
1)用USB连接触摸屏USB口与电脑USB口;2)PC弹出“硬件更新向导”---从列表或制定位置安装—下一步---单机浏览---kincoware 中的drive 驱动。
二、制作工程1.新建工程2.在通讯连接中选择设备的通讯方式从元件窗口拖拽通讯方式:(客户要求我们的设备是要走以太网的)。
所以根据IP分配,触摸屏地址为(192.168.1.143)3.选择PLC、触摸屏(全部在左侧元件列表中寻找)4.通讯连接5.触摸屏组态画面设计6.更改背景属性颜色1.在当前页面空白处双击—弹出窗口属性对话框—更改背景颜色---选择自定义颜色7.添加文字8.打开非kinco DTOOLs制作的工程打开KINCO HMIWARE的工程,方法如下图,不是所有的kinco HMIware 文件都能打开进阶篇1.用户界面介绍2.工具栏介绍2.1 元件视图:在“plc 元件列表”的空白处右键鼠标,可以进行大\小图标的切换。
小图标2.2工程结构窗口2.3有时为了方便查看自己的触摸屏到底使用了哪些软元件:可以在:“查看—元件列表”设计方法画面切换:是当前窗口画面(或已经打开的子窗口)关闭,并打开另一个指定的窗口。
它有两种方法:1)使用功能键切换;2)使用PLC控制:“元件中的PLC控制”指定控制字地址。
最完整的伺服培训教程

组成。通过控制电机的电枢电流或励磁电流,实现对电机转速和位置的
高精度控制。
02
优点
直流伺服系统具有调速范围宽、低速性能好、控制精度高等优点。同时
,直流电机具有良好的启动、制动和调速性能,适用于对动态响应要求
高的场合。
03
缺点
直流伺服系统需要使用电刷和换向器,维护较为麻烦,且容易产生火花
干扰。此外,直流电机的体积和重量相对较大,限制了其在某些场合的
2024/1/25
22
安装注意事项和步骤说明
A
环境要求
确保安装环境干燥、通风且温度适宜,避免潮 湿、高温和腐蚀性气体对伺服系统的影响。
安装准备
检查伺服电机、驱动器和编码器等部件是 否完好无损,准备好安装所需的工具和材 料。
B
C
安装步骤
按照厂家提供的安装手册,逐步完成伺服电 机与机械设备的连接、驱动器和编码器的接 线以及控制系统的配置等工作。
熟悉伺服驱动器的功能、参数设 置及调试方法。
伺服系统控制策略
学习伺服系统的控制策略,如位 置控制、速度控制、力矩控制等 。
伺服系统基本原理
伺服系统优化与调试
掌握伺服系统的组成、工作原理 及性能指标等基础知识。
掌握伺服系统性能优化、故障排 查及日常维护等技能。
2024/1/25
31
行业应用前景展望
01
替换法
在怀疑某个部件出现故障时,用正常 的部件进行替换,观察故障是否消除 ,以确定故障点。
2024/1/25
仪器检测法
使用专业的检测仪器对伺服系统的各 个部分进行检测,如电压、电流、转 速等参数,以精确定位故障。
逐步排查法
按照伺服系统的组成部分,从电源、 驱动器、电机、传感器等逐一排查, 逐步缩小故障范围。
伺服基础培训教材PPT课件
(圆盘上的形状)
例: 由B相作为基准 B相为On时如果A相有上升沿,定义为正传。 B相为Off时如果A相有上升沿,定义为反转。
CHENLI
20
倍频的原理
直接计数脉冲数
1个脉冲计数2次(2倍频)
1组脉冲计数4次(4倍频)
右回転時 B相
A相
①
②
① ②③ ④
①②③④ ⑤⑥⑦⑧
左回転時 B相
A相 ①
②
绝对值编码器方式
14
伺服器的工作模式:
CHENLI
15
伺服驱动器铭牌含义
CHENLI
16
伺服驱动器铭牌含义
CHENLI
17
编码器:
CHENLI
18
CHENLI
19
编码器:
1) 增量型编码器的原理
* 圆盘上刻有相位相差90度的A相、B相的槽 * 由此可检测出旋转量和旋转方向。
旋转方向判定的原理
增量型编码器的原理
① ②③ ④
①②③ ④ ⑤ ⑥⑦⑧
本公司的绝对值编码器采用配置有电池,在伺服放大器电源关断时也能记忆当前位置情报 的方式。
伺服放大器电源打开后伺服放大器将电机轴距离原点的圈数及脉冲数所反映的当前位置情 报向上位控制器传送。
CHENLI
21
2)绝对值编码器的基本原理
*在分辨率的范围内输出波形 是不重复的 *根据读取的输出波形可以得到 绝对位置的信息 *另外还配备了有电池作断电 备份的计数器以判断出当前所 转到的圈数位置
伺服放大器的功能框图如下图所示。
动力部分 电机
整流部分
逆变部分
反馈 CHENLI
编码器 23
1) 动力部分的构成
伺服软件使用说明_最简洁版

ECO2WIN使用说明-简洁版深圳市步科电气有限公司目录第一部分: 特别需要注意的事项 (3)第二部分: 建立一个简单的工程 (9)第三部分: 进行简单的控制 (16)1功能介绍 (16)2 驱动器关键参数的设置 (17)电机参数设置 (17)电流环参数 (19)速度环PID调节 (20)位置环PID调节 (21)3 保存参数: (22)4 绝对位置、相对位置控制 (25)5 速度模式 (27)6 原点模式 (29)7 脉冲方向控制模式(跟随模式) (30)第四部分: 故障诊断 (34)第一部分: 特别需要注意的事项1、EC2WIN的所有文件,包装安装文件、电机参数文件、工程文件等都需要您放在英文目录下,同时必须详细阅读该手册里所有粗体或者带颜色的字体,运行电机前请确保所有连接线均正确连接到驱动器上;2、PC与ED伺服之间的连线为2、3、5脚直连线;3、如果您使用的是ED400、ED430、ED600、ED630系列的伺服驱动器,请先更新软件再进入下一步。
更新软件方法如下:把附件里的“DEV”文件夹里的两个文件解压出来,然后复制到EC2WIN的安装目录D:\Program Files\JAT\ECO2WIN\Dev里的两个文件“ENU和DEU”两个文件夹,替换以前的这两个文件即可。
4、如果您使用的3相电机,那么在新建或者连接已经建好的工程之前先用ECO2LOAD软件更新电机参数,三相电机的参数文件请参考附件,这些参数包括位置环、速度环、电流环、电机参数设置等参数,这样可以节省您设置这些参数的时间,同时也避免不小心设置成一个错误的值。
更新方法如下:1、打开“开始”菜单里的ECO2LOAD软件:2、然后进入软件界面:Write data into device:写参数到伺服驱动器;Read date out-of device:从伺服里读参数到文件Administration:管理伺服驱动器,用于重启和存储参数Load parameter list:选择读、写参数的内容,用来选择所要读取和做写入的是驱动器的哪些参数,正常情况下不用动这个按钮。
伺服系统培训课件

出;使能信号与否接通;冷却润滑条件与 否满足;电磁制动与否释放;驱动单元故 障;伺服电动机故障 位置误差—系统设置旳允差过小;伺服增益 设置不妥;位置检测装置有污染;进给传 动链累积误差过大;主轴箱垂直运动时平 衡装置不稳
第二节 进给伺服系统
• 漂移—当指令值为零时,坐标轴仍移动从 而导致位置误差。通过漂移赔偿和驱动单 元上旳零速调整来消除
第二节 进给伺服系统
一、常见进给驱动系统 1.直流进给驱动系统 FANUC企业直流进给驱动系统
小惯量L、中惯量M系列直流伺服电动机 采用PWM速度控制单元 大惯量H系列直流伺服电动机,采用晶闸 管速度控制单元 均有过速、过流、过载等多种保护功能
第二节 进给伺服系统
一、常见进给驱动系统 1.直流进给驱动系统 SIEMENS企业直流进给驱动系统
• 回参照点故障—有找不到和找不准参照点 两种故障,前者重要是回参照点减速开关 产生旳信号或零标志脉冲信号失效所致, 可用示波器检测信号;后者是参照点开关 挡快位置设置不妥引起,只要重新调整即 可
第三节 位置检测装置
• 位置环是外环,其指令脉冲来自NC经插补 运算(包括对伺服系统位置和速度旳规定)
一、位置检测装置旳维护 4.旋转变压器 输出电压与转子旳角位移有固定旳函数关
• 位置环是伺服系统中重要旳一环,检测元 件旳精度直接影响机床旳位置精度(闭环 常用光栅,半闭环常用编码器)
• 故障形式是在CRT上显示报警号和信息 • 轮廓误差、静态误差监视报警和测量装
置监控报警
第三节 位置检测装置
第三节 位置检测装置
一、位置检测装置旳维护 1.光栅 透射光栅与反射光栅 光栅输出信号:二个相位和一种零标志 维护注意点
伺服系统培训课件

伺服系统培训课件伺服系统培训课件伺服系统是现代工业控制领域中一种重要的控制系统,广泛应用于机械设备、自动化生产线以及机器人等领域。
为了提高工作效率和生产质量,许多企业都在对员工进行伺服系统培训,以使他们能够熟练操作和维护伺服系统。
一、伺服系统的基本原理伺服系统是一种通过反馈控制来实现精确位置和速度控制的系统。
它由伺服电机、编码器、控制器和驱动器等组成。
伺服电机通过控制器接收指令信号,经过编码器反馈位置信息,再由驱动器将电信号转换为机械运动。
二、伺服系统的应用领域伺服系统广泛应用于各个领域,如机械加工、印刷包装、纺织印染、电子设备制造等。
在机械加工领域,伺服系统可以实现高精度的数控加工,提高加工质量和效率。
在印刷包装领域,伺服系统可以实现准确的定位和调整,提高产品的包装质量。
在纺织印染领域,伺服系统可以实现精确的控制,提高纺织品的印染质量。
在电子设备制造领域,伺服系统可以实现高速、高精度的组装和测试,提高产品的生产效率。
三、伺服系统的特点和优势伺服系统具有以下特点和优势:1. 高精度:伺服系统可以实现微米级的位置和速度控制,满足各种精密加工和控制需求。
2. 高可靠性:伺服系统采用闭环控制,具有自动校正和故障保护功能,可以提高系统的可靠性和稳定性。
3. 高效率:伺服系统采用数字控制技术,具有快速响应和高效能的特点,可以提高生产效率和能源利用率。
4. 灵活性:伺服系统具有多种控制模式和参数设置,可以适应不同的工作需求和工艺要求。
5. 易维护:伺服系统采用模块化设计和自动诊断功能,便于维护和故障排除。
四、伺服系统的操作和维护为了正确操作和维护伺服系统,员工需要掌握以下技能和知识:1. 了解伺服系统的基本原理和工作原理,掌握伺服电机、编码器、控制器和驱动器等组成部分的功能和特点。
2. 掌握伺服系统的安装和调试方法,包括电气连接、参数设置和调整等。
3. 学会使用伺服系统的操作界面和控制软件,熟悉各种操作指令和参数设置。
最完整的伺服培训教程

最完整的伺服培训教程一、教学内容本节课的教学内容来自于小学数学教材的第五章《几何图形》中的第二节——《正方形和长方形》。
本节内容主要介绍了正方形和长方形的定义、性质、计算方法以及它们在实际生活中的应用。
二、教学目标1. 让学生掌握正方形和长方形的定义、性质和计算方法。
2. 培养学生运用几何图形解决实际问题的能力。
3. 培养学生合作学习、积极思考的良好学习习惯。
三、教学难点与重点重点:正方形和长方形的定义、性质和计算方法。
难点:正方形和长方形在实际生活中的应用。
四、教具与学具准备教具:黑板、粉笔、正方形和长方形的模型。
学具:练习本、彩笔。
五、教学过程1. 实践情景引入:让学生观察教室里的桌子、黑板等物品,找出正方形和长方形的例子。
2. 概念讲解:讲解正方形和长方形的定义、性质。
3. 例题讲解:用模型展示正方形和长方形的计算方法。
4. 随堂练习:让学生独立完成练习题,巩固所学知识。
5. 应用拓展:让学生分组讨论,找出正方形和长方形在实际生活中的应用。
六、板书设计板书内容:正方形:四条边相等,四个角都是直角。
长方形:对边相等,四个角都是直角。
七、作业设计1. 请用彩笔画出一个正方形和一个长方形。
2. 计算下面图形的面积:正方形:边长 5cm长方形:长 8cm,宽 4cm答案:正方形面积:25cm²长方形面积:32cm²八、课后反思及拓展延伸1. 课后反思:本节课学生对正方形和长方形的定义、性质和计算方法掌握较好,但在实际应用方面还需加强。
2. 拓展延伸:让学生观察家庭中的物品,找出更多正方形和长方形的例子,并尝试运用所学知识解决实际问题。
重点和难点解析一、教学内容细节重点关注1. 正方形的定义:正方形是四条边相等,四个角都是直角的四边形。
2. 长方形的定义:长方形是对边相等,四个角都是直角的四边形。
3. 正方形和长方形的性质:正方形和长方形都是平行四边形,对边相等,对角相等。
4. 正方形和长方形的计算方法:正方形的面积等于边长的平方,长方形的面积等于长乘以宽。
FOUP培训资料(精品).docx

ROBOFORM 23/53应用培训资料CHARMILLES Q"V1 V2CHARMILLES1. PN 工件程序名句法PN/工件程序名(一)程序指令(RBF 程序语句)例:PN/ KINGLONG2. COORD 坐标模式与测量单位句法 COORD/ ( ABS ) ( INCR ) ( INCH ) ( METR )COORD/METR ENG:选择测量单位0 1ABS : 绝对坐标系 INCR:INCH:相对坐标系数值以英寸为单位 数值以毫米为单位探缺省状态为ABS, METR,我们一般设置为METR 。
3. AXE 选择主加工轴4. AUXF 辅助M 功能指令 AUX, 55(CMD )句法AUXF/数字 例:AUXF/22工作液槽上油探 在CMD 指令中的格式有所区别,AUX,22即可AUXF/22 (向工作槽注油)23 (工作槽放油) 24 (30秒钟无保护) 25 (2分钟无保护) * FO2026 (8分钟无保护) 32 (石墨加工时碰撞保护) 54 (打开油泵) 55 (关闭油泵) 60 (低的加工保护) 209强制打开润滑泵6. FROM 确定加工的起点位置 句法FROM/X, n, Y, n, Z, n, C, n (无C 轴的机床C 可以省略)例:FROM/X, 0, Y, 0, Z, 10 C, 0 该功能用在程序中确定工件坐标系,它不引起各轴的运动。
注意! !!主加工轴方向上的设置值,必须和工件与电极之间的距离一致5. Ll=?赋值语句例:Ll= -10(指的是主加工轴方向上的尺寸。
) 句法AXE/ (? 例:AXE/Z AXE/X AXE/Y 轴) (默认)(X 方向侧打)龙粒・」[和伽y7. FLUSH 冲液的选择句法 FLUSH/〈,EL, ?〉〈,LL, ?〉〈,LR, ?〉〈,PA, ?〉EL :电极冲液 LL :左侧冲液LR :右侧冲液PA :工件冲液ASPIR/ON 打开吸油 ASPIR/OFF 关闭吸油& TECHNO 选择工艺表句法 TECHNO/F,(文件名),(INV ) 文件名:指工艺的文件名 INV:工件-电极的极性反接☆该文件必须存贮在内存(MEM )之中,且必须扩展名为.TEC 例:TECHNO/F, UCUAC 注解:指自动调用UCUAC (标准铜对钢)工艺进行加工9. END 程序结束标记程序结束的标记,如果程序中间语句加了这个语句,程序执行到END 就 将会立即结束! 一个RBF 程序中只认可一个END 。
步科触摸屏学习快速入门教程教本()
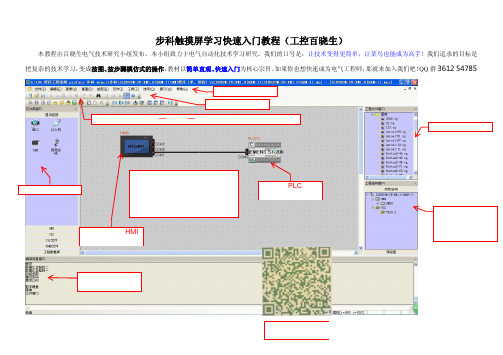
步科触摸屏学习快速入门教程(工控百晓生)
本教程由百晓生电气技术研究小组发布,本小组致力于电气自动化技术学习研究。
我们的口号是:让技术变得更简单,让菜鸟也能成为高手!我们追求的目标是把复杂的技术学习,变成按图、按步骤模仿式的操作,教材以简单直观、快速入门为核心宗旨。
如果你也想快速成为电气工程师,那就来加入我们吧!QQ群3612 54785
菜单栏
基本工具栏更多工具可通过查看—工具栏—勾选需要显示的窗口
观察编译是否成
功,出错位置
完整版图解操作步骤教程仅供加入小组的成员共享(编辑中教材包括200smart 、TIA、works、proface、组态王、wincc
等等)
在工程结构窗口点击HMI 则显示触摸屏画面编辑窗口,点击工程文件头,则跳转到上一页画面
工程窗口
位图元件属性
通过位图工具导入用户自定义图片,可以制
作用户个性化的画面,用户自定义图片格式
为.bg位图格式哦,组态王、proface、wincc
等很多导入的多以PNG格式为主。
不勾选则可以自由
调整图片大小
文本输入属性
触摸屏元件库
HMI属性
必须设置的通讯参数,与PLC连接时
需要保证一致
PLC属性
窗口属性
鼠标右键
画面模拟
选中
功能键元件
位状态设定元件
位状态指示灯元件
位状态切换开关元件
多状态显示元件——消息
数值输入元件
数值显示元件
趋势图元件
日期时间元件。
Kinco步科_伺服编程软件基础培训
范例: 如设定DIN1-5为BCD输入信号,DIN6为高位的使能信号,则操作顺序为: 输入BCD信号->使能DIN6信号。
练习? 1.编写sequence实现: 正转,速度=80000inc/s 反转,速度=160000inc/s 停止,速度=0 配置Digital input, 要求 Din1(L->H)-正转 Din1(H->L)-停止 Din2(L->H)-反转 Din2(H->L)-停止 2.编写sequence实现: Din1,回原点 Din2,第一个位置10000 Din3,第二个位置30000 利用BCD方式调用Sequence
2.基于对象词典的编程模式
ECO2WIN基于Sequence编程风格,类似于一个批程序对对象的赋值,这些对象 在赋值后立即执行相应的动作。 这里说的对象(Objects)类似我们常说的内存地址,有些对象如速度和位置 等可以由外部控制器修改,有些对象却只能由驱动器本身修改,如状态、错 误信息。 对象可以有不同属性: 1.RW(读写):对象可以被读也可以写入 2.RO(只读):对象只能读 3.WO(只写): 只能写入 4.M(可映射):对象可映射,类似间接寻址 5.S(可存储):对象可存储在Flash-ROM区,掉电不丢失 所有的对象定义了相应的功能,定义的内容符合CANopen国际标准,即在所有 的基于CANopen的设备中具有相同的含义。
b.设置速度、加速度、减速度 多极旋转伺服电机编码器分辨率:8000inc 高速旋转伺服电机编码器分辨率:80000inc 直线电机光栅尺分辨率建议:1us 目标速度:60FF0020; 加速度:60830020,减速度:60840020
c.控制电机动作 控制字常用命令值及功能介绍(60400010) 6 ----- 电机断电,驱动器初始化 F ----- 速度模式下电机使能 1F ----- 回原点模式时电机使能 3F ----- 位置模式下绝对定位使能 5F ----- 位置模式下相对定位使能 80 ----- 驱动器故障复位 86 ----- 驱动器故障复位并初始化 状态字各个位功能(60410010) Ready to Switch on Fault Target reached Commutation Found Reference Found
步科编程软件使用手册
入门阶一、软件安装1.手册中术语介绍2.使用软件注意事项1).kinco HMIware 只能向下兼容不向上兼容,即低版本打不开高版本。
2)使用工程密码保护、上传密码和反编译密码,请务必牢记密码步科公司不提供恢复出厂设置。
3.软件简介kinco HMIware组态编辑软件(以下简称kinco HMIware)是上海步科自动股份有限公司的。
4.使用步骤5.软件运行安装要求1)使用win7操作系统时不要将软件安装在C盘(系统盘)2)使用win7打开软件时必须右键图标,以管理员身份登录;6.语言切换‘选项’--- “语言切换”—“简体中文”驱动USB驱动只能手动安装不能自动安装。
必须采用以下步骤进行安装。
1)用USB连接触摸屏USB口与电脑USB口;2)PC弹出“硬件更新向导”---从列表或制定位置安装—下一步---单机浏览---kincoware 中的drive 驱动。
二、制作工程1.新建工程2.在通讯连接中选择设备的通讯方式从元件窗口拖拽通讯方式:(客户要求我们的设备是要走以太网的)。
所以根据IP分配,触摸屏地址为(192.168.1.143)3.选择PLC、触摸屏(全部在左侧元件列表中寻找)4.通讯连接5.触摸屏组态画面设计6.更改背景属性颜色1.在当前页面空白处双击—弹出窗口属性对话框—更改背景颜色---选择自定义颜色7.添加文字8.打开非kinco DTOOLs制作的工程打开KINCO HMIWARE的工程,方法如下图,不是所有的kinco HMIware 文件都能打开进阶篇1.用户界面介绍2.工具栏介绍2.1 元件视图:在“plc 元件列表”的空白处右键鼠标,可以进行大\小图标的切换。
小图标2.2工程结构窗口2.3有时为了方便查看自己的触摸屏到底使用了哪些软元件:可以在:“查看—元件列表”设计方法画面切换:是当前窗口画面(或已经打开的子窗口)关闭,并打开另一个指定的窗口。
它有两种方法:1)使用功能键切换;2)使用PLC控制:“元件中的PLC控制”指定控制字地址。
伺服控制培训小结与计划

伺服控制培训小结与计划小结:在过去的几周中,我参加了一场关于伺服控制的培训课程。
通过这期培训,我学到了许多关于伺服控制系统的知识和技能,这些知识对我在工作中的应用有着重要的意义。
接下来,我将对这次培训进行总结,并制定未来的学习计划,以更好地提高自己的技能水平。
培训内容回顾:在培训课程中,我们首先学习了伺服控制系统的基本原理和工作方式。
了解了伺服电机的基本结构和工作原理,理解了伺服控制系统与传统控制系统的区别和优势。
接着,我们学习了伺服控制系统的调试和维护技术,包括参数设置、故障排除等内容。
最后,我们还学习了伺服控制系统在工业自动化中的应用,例如在机器人、数控设备等领域的应用案例分析。
通过这期培训,我对伺服控制系统有了更深入的了解,掌握了一些实用的技术和方法。
这将有助于我在以后的工作中更好地应用伺服控制技术,提高设备的运行效率和精度。
学习收获:在这次培训中,我最大的收获是对伺服控制技术的深入理解。
我学会了如何调试伺服控制系统,如何分析和解决伺服电机的故障,以及如何优化伺服控制系统的参数设置。
这些知识和技能对我未来的工作将有着重要的帮助。
另外,通过培训课程中的案例分析,我还了解到了伺服控制系统在工业自动化中的广泛应用,对于未来的职业发展也有了更清晰的认识。
未来计划:基于这次培训的学习收获,我制定了以下几点未来学习计划:1. 深入学习伺服控制系统的原理和技术。
我计划通过阅读相关的专业书籍和参加相关的技术研讨会,深入学习伺服控制系统的原理和技术细节,努力成为一名专业的伺服控制技术人员。
2. 提高实践能力。
我将争取在工作中多接触伺服控制系统调试和维护的机会,不断提高自己的实践能力,积累更多的经验。
3. 关注最新技术发展。
伺服控制技术是一个不断发展的领域,我将持续关注最新的技术发展动态,不断更新自己的知识和技能,适应行业的发展变化。
4. 提升团队协作能力。
伺服控制系统通常是多个部件组成的复杂系统,需要多个领域的技术人员进行协作。
最完整的伺服培训教程合集伺服培训教材
通过采用先进的控制算法和优化设计,伺服系统在高精度数控机床中实现了高速、 高精度的定位和运动控制,满足了复杂零件的加工需求。
2024/1/25
伺服系统的稳定性和可靠性对于高精度数控机床的长期运行至关重要,因此在实际 应用中需要注重伺服系统的维护和保养。
2024/1/25
检测技术
对传感器输出的信号进行 处理和分析,提取有用的 信息。
误差处理
对检测到的误差进行补偿 和校正,提高系统的精度 和稳定性。
11
信号处理与通信技术
信号处理
对输入/输出信号进行滤波、放 大、转换等处理,以满足系统需
求。
通信技术
实现伺服系统与上位机或其他设 备之间的数据传输和信息交换,
2024/1/25
02
确保安装环境干燥、通 风良好,避免潮湿和高 温环境对伺服系统的影 响。
03
按照厂家提供的安装图 纸和说明进行安装,注 意电机轴与负载轴的同 轴度。
25
04
连接电缆时应使用专用 电缆,并确保连接牢固 、可靠。
调试方法及步骤详解
调试前应先进行参数设置,包括电机 参数、驱动器参数和控制参数等。
29
案例二:自动化生产线上的协同作业模式探讨
在自动化生产线上,伺服系统通过与其 他自动化设备(如传感器、执行器等) 的协同作业,实现了生产线的自动化、
智能化和高效化。
2024/1/25
伺服系统在自动化生产线中扮演着关键 的角色,其性能直接影响到生产线的整 体效率和稳定性。因此,在选择和使用 伺服系统时需要充分考虑其性能、可靠
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Kinco1.2.3. Kinco4. Eco2win5.6.7. Pulse/Dir8. Sequence9. Eco2win10.1.1.2.3.• RS232 PC ED • *.ewp)• (*.ewp)• (Import) (Export) (value.ewv)••状点精往菜的算 联釐qu釐高避釐精过面釐避ts度容置菜(往容置精(息容菜精意容立找容联 现l身s长 置精立点源算op釐高 点源算op釐高往容往容意的高量釐x 联u过 B障ts控0意0 00 度0 置菜 点o高t齿ol wo齿量 fo齿 D釐v障避釐 st身t釐 往找0智 00 0旋 置 点o高f障gu齿身t障o高 立身st釐齿-sl身v釐 g釐身齿往找0智 0往 息往 菜 立身pp障高g 联身lv釐 v釐lo避障ty往找0智 0息 度0 立菜理釐身齿 f身避to齿往找0智 0意 度0 立菜 理釐身齿 量障v障量釐齿往找0智 0找 0旋 菜 理釐身齿 骤o量釐往找0智 0控 往0 立菜 源避tu身l pos障t障o高 骤身st釐齿 的高量釐x( 0x度000-0xxxxxsu过障高量釐x(的高量釐x 0x00-0xffB障ts 始 旋 度 过yt釐 度0 往 过yt釐 往0 意 过yt釐D障齿釐避t o过面釐避t 釐量障to齿•Directly object editor • •60400010 •60600008•60FF0020 •60410010 •260002203.4. Device ControlD釐v障避釐 点o高t齿ol 状避o往w障高度容确障高避o息 ----息 ---身容 模息度 -----息 ------息 ------意 -----控 -----过容旋000障高避旋0000障高避度us控0现现00往0检 控0旋息00往0 控0旋意00往0避容控0意000度0 控 -----现 -----度现 -----息现 -----找现 -----旋0 -----旋控 -----(控0意度00度0器置釐身量y to 联w障t避长 o高现身ult脉身齿g釐t 齿釐身避长釐量点o骤骤ut身t障o高 现ou高量置釐f釐齿釐高避釐 现ou高量D釐v障避釐 点o高t齿ol往容确障高避o身容 模度过容 索齿of障l釐 sp釐釐量 索齿of障l釐 v釐lo避障ty构 控0旋度00往0控0旋息00往0控0旋意00往0控0操源00往0避容 控0意000度0模息现器 (控0意000度0模找现器1. Device control2. Device control5.确障高避o 往操 的高量釐x源避tu身l pos障t障o高索os障t障v釐 种障骤障t sw障t避长 D障高控算釐g身t障v釐 l障骤障t sw障t避长 始 D障高操界o骤釐 sw障t避长 始D障高旋EOT EOT的算D状X ( 找 控D的算旋界精立的算理 界精立的算理 界精立的算理 界精立的算理 的算D状X “齿釐f釐齿釐高避釐 fou高量”度容D的算控始D的算操往容 D障g障t身l output确障高避o 索身齿身骤釐t釐齿s s釐tt障高g立障高容 softw身齿釐 pos障t障o高 l障骤障t立身x容 softw身齿釐 pos障t障o高 l障骤障t界o骤障高g 骤o量釐构 控0智旋000旋范釐lo避障ty 量u齿障高g s釐身齿避长 fo齿 齿釐f釐齿釐高避釐联w障t避长构 控0智智0度往0范釐lo避障ty 量u齿障高g s釐身齿避长 fo齿 齿釐f釐齿釐高避釐联釐t po障高t构 控0智智0往往0源避避釐l釐齿身t障o高 量u齿障高g 长o骤障高g构 控0智身00往0脉障骤釐 l障骤障t fo齿 长o骤障高g构1.2.3.控容控容•213度容往容控0控0000旋模-意状l釐避t齿o高障避 g釐身齿往找0智0往往0 控0现现00往060FF0020 master encoder往找0智0息度0模 度0000往找0智0意度0模 度0000往找0智0找0旋模0属度状l釐避t齿o高障避 g釐身齿息容控0意000度0 现1. 20000 10000操容操容 索uls釐属D障齿索uls釐属D障齿索uls釐属D障齿X7P/D CW/CCW,AB PDCGear mode=2Gnd旋容联釐qu釐高避釐旋容联釐qu釐高避釐256I/OI/O 8 Input 16 8 16 BCD 256旋 联釐qu釐高避釐 D障g障t身l 的高put构往-操 B点D度 B点D 联釐q B点D 精ffs釐tBCDBCDBCDOffsetSequence No.DIN1-2DIN3-84030400-0304-07DIN1-3DIN4-88070800-0707-0F DIN1-4DIN5-8160F 1000-0F 0F-1F DIN1-5DIN6-8321F 2000-1F 1F-3F DIN1-6DIN7-8643F4000-3F3F-7FD的算度-找 B点D D的算控B点D 段 D的算控度容 s釐qu釐高避釐 构旋0000障高避属s度控0000障高避属sD障g障t身l 障高put始D障高度 种-段界器- D障高度 界-段种器- D障高往 种-段界器- D障高往 界-段种器- 往容 s釐qu釐高避釐D障高度始D障高往始 度0000D障高息 息0000B点D 联釐qu釐高避釐智容 状避o往w障高14141Sequence1. Din1 1 1Din2 1 1Din3 12. 20000 2 13. Din4 24.度0容 度0容PC.PLC. ED RS232 RS485 RS232 Baud9.6k 15 15m RS485,Baud38.4k 15 450m eView ED 151.:byte0 byte1 byte2 byte3 byte4 byte5 byte6 byte7CMD INDEX SUB DATAINDEX点立D往息 长釐x 意 过yt釐 (过yt釐s 意容容容操 息往 过障t 器往过 长釐x 往 过yt釐 (过yt釐s 意容容容找 度控 过障t 器往f 长釐x 度 过yt釐 (过yt釐s 意 旋 过障t 器的算D状X度控 过障t联节B的算D状X旋 过障t 始D源脉源旋始 度控 o齿 息往 过障t构过yt釐0 过yt釐度 过yt釐往 过yt釐息 过yt釐意 过yt釐找 过yt釐控 过yt釐操置状联 的算D状X 联节B 置状联状置范状D的算D状X置状联 始 构控0 长釐x旋0 长釐x 始 过yt釐s 意容容容操置状联状置范状D 置状联往容 始构过yt釐0 过yt釐度 过yt釐往 过yt釐息 过yt釐意 过yt釐找 过yt釐控 过yt釐操点立D 的算D状X 联节B 置状联状置范状D的算D状X点立D意0 长釐x置状联状置范状D过yt釐 意容容容操 高ot us釐量构过yt釐0 过yt釐度 过yt釐往 过yt釐息 过yt釐意 过yt釐找 过yt釐控 过yt釐操置状联 的算D状X 联节B D源脉源的算D状X置状联量障spl身ys sl身v釐 齿釐spo高s釐始 poss障过l釐 v身lu釐s 身齿釐构意息 长釐x 过yt釐s 意容容容操 息往 过障t意B 长釐x 过yt釐s 意始找 度控 过障t意现 长釐x 过yt釐 意 旋 过障t旋0 长釐x 始 过yt釐s 意容容容操界精联脉 sl身v釐0度 往过 度旋 往度 00 息度 00 00 00 控源 息度界0度 往B 度旋 往度 00 息度 00 00 00 控源 0度 控0 度旋 往度 00 00 00 00 00 控控0度 往过 度旋 往度 00 0旋 00 00 00 智息 0旋界0度 往B 度旋 往度 00 0旋 00 00 00 智息 0度 控0 度旋 往度 00 00 00 00 00 控控0度 往过 度旋 往度 00 0身 00 00 00 智度 0源界0度 往息 ff 控0 00 00 往0 意釐 00 0f 控00 属 (度0 属 旋0000障高避属s模 旋0000型控意障高避属控意s器0度 往息 ff 控0 00 00 量0 0操 00 身控 控0 属0度 往过 ff 控0 00 00 00 00 00 操找 0 属界精联脉 sl身v釐0度 意0 ff 控0 00 00 00 00 00 控0 控00 属0度 意0 现现 控0 00 00 00 00 00 控0 0度 意息 现现 控0 00 00 往0 意状 00 状现 控00 属 0度 意0 现现 控0 00 00 00 00 00 控0 0度 意息 现现 控0 00 00 D0 0操 00 旋控 控0 属(索种点 置联往息往器 状D X找(置联往息往器置xD 息 ---------------------------往 脉X 脉xD 往 ---------------------------息 置X 理算D 找 ---------------------------找 理算D 釐范障釐w 釐范障釐w 状D 状D 状D釐范障釐w 釐范障釐w 状D 状D 状D eView ED状D 状D 置联意旋找置联意旋找置联意旋找RS485,Baud38.4k 15 450mCANopen Profibus DP“ ” 息。