半实物仿真的PLC实验平台
基于LabVIEW的多轴运动控制系统半实物仿真平台设计

基于LabVIEW的多轴运动控制系统半实物仿真平台设计基于LabVIEW的多轴运动控制系统半实物仿真平台设计摘要:随着工业自动化的不断发展,多轴运动控制系统在工业生产中的应用日益广泛。
为了提高系统的性能并减少实际试验中的风险与成本,本文设计了基于LabVIEW的多轴运动控制系统半实物仿真平台。
该平台通过软件仿真实现多轴运动控制的动态展示,使用户能够更直观地了解系统的工作原理以及调试参数。
本文首先介绍了多轴运动控制系统的基本原理和结构,然后详细阐述了平台的设计思路和实现过程,并通过实例验证了平台的可行性和有效性。
最后,对平台的不足之处进行了总结,并对未来的工作进行了展望。
关键词:多轴运动控制系统;半实物仿真平台;LabVIEW;动态展示;仿真实例1.引言多轴运动控制系统是一种广泛应用于机械加工、自动化生产等领域的高精度控制系统。
它通过控制驱动器和伺服电机来实现工作物体在多个轴向上的运动控制,可以实现较高的定位精度和运动速度,并且具有反馈控制的能力。
然而,为了确保系统的安全性和可靠性,在实际开发和试验中需要耗费大量的时间和资源。
因此,设计一种能够在实际试验之前对系统进行全面验证和调试的仿真平台具有重要的意义。
2.多轴运动控制系统的基本原理和结构多轴运动控制系统由伺服电机、传感器、运动控制器以及上位机等组成。
其中,伺服电机通过驱动器转换电能为机械能,可以控制物体的位置和速度。
传感器用于实时反馈物体的状态信息,如位置、速度和加速度等。
运动控制器是系统的核心部件,负责接收传感器的反馈信号,并通过控制算法生成合适的输出信号控制伺服电机。
上位机是用户与系统交互的界面,通过上位机可以输入运动参数和控制指令,实现运动轨迹的规划和控制。
3.基于LabVIEW的多轴运动控制系统半实物仿真平台设计为了满足对多轴运动控制系统进行全面仿真和调试的需求,本文设计了一种基于LabVIEW的半实物仿真平台。
该平台实现了具有动态展示功能的多轴运动控制系统的仿真,使用户能够更加直观地了解系统的工作原理和调试参数。
半实物仿真简介

半实物仿真平台简介2.1组成半实物仿真平台主要由主控计算机、仿真计算机、控制计算机(原型机)、A/D接口、D/A接口及相关能源设备、记录设备等组成,如图1所示。
其中被控对象采用数学仿真,由dSPACE仿真计算机通过软件实现;控制计算机用仿真实物实现,即用dSPACE标准组件作为控制计算机的快速原型机,实现控制计算机功能;仿真计算机通过A/ D、D/A等输入输出口与控制系统实物相互,实现数字控制器与外界设备的信息交换。
输入和输出信息分别从转接口和dSPACE引出,通过记录仪进行记录。
2.2主控计算机主控计算机是整个仿真系统的上位机,采用有多个ISA总线的工控机,安装MATLAB6.5系列软件、dSPACE软件,用于构建控制系统Simulink框图、进行系统参数优化和数字仿真、控制仿真过程、编译下载仿真软件、输入输出仿真结果等。
根据控制系统设计和建模结果,利用MATLAB/Simulink构建系统数字仿真框图,进行数字仿真和控制参数优化。
在数字仿真的基础上,利用dSPACE提供的RTI软件,将被控对象的Simulink框图生成实时代码并自动下载到dSPACE仿真计算机中;将控制器控制方程的Simulink框图生成实时代码并自动下载到dSPACE快速原型机中。
用dSPACE提供的综合试验与测试环境软件ControlDesk、自动实验及参数调整软件MLIB/MTRACE、PC与实时处理器通信软件CLIB 以及实时动画软件RealMotion等实现试制和参数测量。
该软件环境可以方便地实成、下载和试验调试等工作。
2.3仿真计算机用dSPACE标准组件系统DS1005PPC处理器板作为仿真计算机,用以模拟被控对象。
DS1005PPC处理器与主控机之间用光缆连接交换数据。
DS1005PPC板主频480MHz;片内数缓存均为32KwordS;通过32位PHS总16块I/O板,通过ISA总线与主机进行并具有相当强的计算能力。
CosiWorks-RT实时半实物仿真平台
半实物仿真
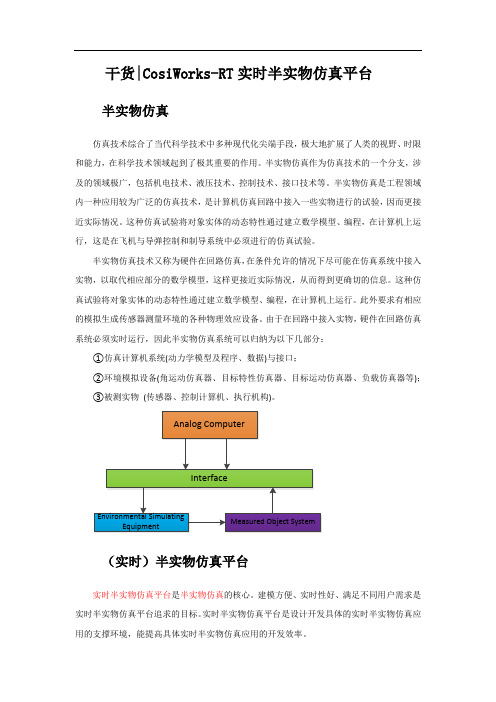
仿真技术综合了当代科学技术中多种现代化尖端手段,极大地扩展了人类的视野、时限和能力,在科学技术领域起到了极其重要的作用。半实物仿真作为仿真技术的一个分支,涉及的领域极广,包括机电技术、液压技术、控制技术、接口技术等。半实物仿真是工程领域内一种应用较为广泛的仿真技术,是计算机仿真回路中接入一些实物进行的试验,因而更接近实际情况。这种仿真试验将对象实体的动态特性通过建立数学模型、编程,在计算机上运行,这是在飞机与导弹控制和制导系统中必须进行的仿真试验。
硬件接口
实时半实物仿真系统最显著的特点就是与外部硬件相结合的系统。具有完全的硬件接口兼容性是衡量一个半实物仿真平台的标尺,体现半实物仿真平台的“价值”。
CosiWorks-RT支持AFDX、1553B、ARINC429、MIL1394B、CAN、串口、模拟量、数字量、PWM、RTD、旋变等多种I/O接口;同时CosiWorks-RT引擎能够访问CustomDevice资源库和系统资源的运行组件。此接口的使用为新增硬件接口创建支持,用户可以通过此接口创建自己的硬件接口驱动程序,将生成的驱动程序加载到CustomDevice资源库当中,CosiWorks-RT将自动加载CustomDevice资源库当中的自定义设备到系统当中。
建模环境
CosiWorks-RT支持市面上主流的图形建模工具以及代码建模开发工具所生成的模型库的导入。包括MathWorks, Inc.的Simulink®软件、ITI的SimulationX、Maplesoft的MapleSim、Gamma Technologies Inc.的GT-POWER,YHSIM以及其他编程环境所创建并编译的函数或模型代码。
2.建模阶段,包括仿真系统描述、建立系统数学模型及仿真数学模型;
半实物仿真平台的研究和实现
面向VxWorks的半实物仿真平台的研究和实现
第六图书馆
针对传统半实物仿真中的一些问题,提出一种新的面向VxWorks的半实物仿真平台。
设计了标准化、多接口、可扩展的仿真计算机硬件架构,解决了硬件I/O接口的多样性和扩展性问题。
利用Simulink进行可视化建模,简化了模型的建立。
通过Matlab的RTW工具箱自动生成面向硬件平台的基于实时操作系统VxWroks的可执行代码。
自动代码生成提高了半实物仿真的开发效率,基于VxWorks的可执行代码保证了半实物仿真的实时性。
对该仿真平台涉及的关键技术,如I/O接口驱动程序、针对硬件平台的VxWorks移植和代码生成以及实时模型参数修改和仿真数据采集等进行了研究和实现。
针对传统半实物仿真中的一些问题,提出一种新的面向VxWorks的半实物仿真平台。
设计了标准化、多接口、可扩展的仿真计算机硬件架构,解决了硬件I/O接口的多样性和扩展性问题。
利用Simulink进行可视化建模,简化了模型的建立。
通过Matlab的RTW工具箱自动生成面向硬件平台的基于实时操作系统VxWroks的可执行代码。
自动代码生成提高了半实物仿真的开发效率,基于VxWorks的可执行代码保证了半实物仿真的实时性。
对该仿真平台涉及的关键技术,如I/O接口驱动程序、针对硬件平台的VxWorks移植和代码生成以及实时模型参数修改和仿真数据采集等进行了研究和实现。
半实物仿真 VxWorks Simulink计算机工程王子健 张军 罗喜伶北京航空航天大学电子信息工程学院,北京1000832007第六图书馆
第六图书馆
第六图书馆
第六图书馆
第六图书馆。
项目名称半实物仿真平台

一、项目名称:半实物仿真平台二、招标数量:1套三、技术参数1.8槽机箱,PXIe总线形式;2.*CPU:Intel i7四核CPU 2.6GHz每核, 实时操作系统,4GB内存,8GB系统带宽;3.电力电子HIL 应用功能;3.1.*实时仿真FPGA芯片:Xilinx K7-160T;3.2.*IO:同步模拟输出 16通道1MS/s,16bits,+-10V;同步模拟输入 16通道500KS/s,16bits,+-10V;数字输入72通道,10MHz,3.3V TTL;数字输出16通道,10MHz,3.3V TTL;3.3.*支持任意电力电子拓扑搭建;3.4.*不需要手动分割模型;4.电机实时仿真功能;4.1.*通用电机系统的实时仿真:支持Simulink通用电机;4.2.*自定义电机实时仿真:支持基于Simulink/LabVIEW自定义的电机仿真可实现在CPU或者FPGA上;4.3.*非线性电机实时仿真:支持JMAG 搭建的三相永磁同步电机实现在FPGA上;4.4.*非线性电机仿真FPGA芯片:Xilinx K7-325T;4.5.非线性电机实时仿真IO:同步模拟输出 18通道1MS/s,16bits,+-10V;同步模拟输入6通道1MS/s,16bits,+-10V;数字输入32通道,10MHz,3.3V TTL;数字输出8通道,10MHz,3.3V TTL;4.6.能做自闭环;4.7.*FPGA仿真不需要编译过程;4.8.*FPGA上的实时仿真拓扑大小:40个关键元件(L,C,开关,电源);4.9.*FPGA实时仿真步长:250ns-1.25us;4.10可扩展,扩展性好,可升级solver,也可升级硬件板卡扩展;5.RCP应用功能5.1.*FPGA芯片:Xilinx K7-160T;5.2.IO:同步模拟输出16通道,1MS/s,16bits,+-10V;同步模拟输入16通道,500KS/s,16bits,+-10V;数字输入20通道,10MHz,3.3V TTL;数字输出20通道,10MHz,3.3V TTL;PWM输出40路PWM 输出;5.3.软件功能描述:支持Simulink或LabVIEW电力电子控制算法在实时控制器上的快速下载和实时运行,支持电力电子控制的PWM脉冲发生,编码器信号处理;提供示范例程。
基于虚拟仿真模型的PLC 实训平台
第39卷 第4期吉林大学学报(信息科学版)Vol.39 No.42021年7月Journal of Jilin University (Information Science Edition)July 2021文章编号:1671⁃5896(2021)04⁃0397⁃06基于虚拟仿真模型的PLC 实训平台收稿日期:2020⁃01⁃18基金项目:吉林大学实验技术基金资助项目([2019]15号)作者简介:梁亮(1981 ),男,吉林洮南人,吉林大学工程师,硕士,主要从事电工电子技术实验教学与研究,(Tel)86⁃138********(E⁃mail)liangliang@;通讯作者:程丽丽(1983 ),女,黑龙江依安人,吉林大学副教授,主要从事机电设备系统设计与控制研究,(Tel)86⁃138********(E⁃mail)lilycheng@㊂梁 亮a ,程丽丽b ,张珠玲a ,王丽华a(吉林大学a.通信工程学院;b.机械与航空航天工程学院,长春130022)摘要:为提高可编程逻辑控制系统实验教学效果,基于 西门子杯”中国智能制造挑战赛工业自动化赛项电梯仿真模型,以教学用5层电梯为被控对象,取代原有教学电梯的电气控制系统,采用西门子公司S7⁃1200系列可编程控制器㊁变频器㊁触摸屏,配置硬件系统端子,开发一款新型电梯教学实训平台,建立一种新型的 虚⁃实”结合的实验教学模式㊂同时,系统设计引入模块化思想,易于调整实训内容,让学生由易入难地学习相关课程内容㊂使用该实训平台从虚拟仿真到实际操作,可激发学生的学习兴趣,在培养学生的专业素质方面起到积极作用㊂关键词:虚拟仿真;电梯模型;可编程逻辑控制器中图分类号:TP233文献标识码:AExploration and Research of PLC Training Platform Based on Virtual Simulation ModelLIANG Liang a ,CHENG Lili b ,ZHANG Zhulin a ,WANG Lihua a(a.College of Communication Engineering;b.College of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China)Abstract :In order to improve the experimental teaching effect of programmable logic control system,based on the elevator simulation model of Siemens Cup”China Intelligent Manufacturing Challenge,taking the five⁃story elevator for teaching as the controlled object,replacing the electrical control system of the original teaching elevator,adopting Siemens S7⁃1200series programmable controller,frequency converter and touch screen,and configuring hardware system terminals,a new elevator teaching and training platform is developed,and a new experimental teaching mode of virtual⁃real”combination is established.And the modular idea is introduced into the system design,which makes it easy to adjust the training content,so that students can learn the relevant course content from easy to difficult.From virtual simulation to practical operation,this training platformstimulates students’interest in learning and plays an active role in cultivating students’professional quality.Key words :virtual simulation;elevator model;programmable logic controller 0 引 言可编程逻辑控制器(PLC:Programmable Logic Controller)技术已成为现代工业自动化的重要技术之一㊂高等学校工科专业都设有‘电气控制原理与PLC 技术“课程㊂电气控制原理是学习PLC 技术的基础㊂电气控制系统可以解决简易小型系统的自动过程控制,但对大型的复杂自动过程系统,传统的电气控制系统具有局限性㊂PLC 的出现降低了电气控制系统硬件连接的复杂性,以程序逻辑的形式完成了部分硬件电路的功能㊂随着工业自动化㊁数字化㊁智能化的发展,智慧工业和生活已成为未来的发展方向[1],世界各国制造业创新战略对未来的工程技术人才要求也逐渐提高[2⁃3]㊂PLC 技术如今在工业自动化中占据了重要位置,同时也成为自动化专业学生学习的重要部分㊂随着工业现代化技术的发展,对PLC 技术人才的要求不断提高,基础的PLC 技术实验项目学习已不能满足人才培养的需求,更复杂㊁系统的实训项目在教学过程中势在必行㊂电梯控制系统是PLC 技术应用的典型系统,既包含基础的电气控制原理,又包含典型的PLC 硬件及软件系统㊂但日常生活的电梯系统受安装条件限制,无法进入课堂或实验室,而电梯模型可满足实际教学的需求[4⁃5]㊂实践教学表明,该教学实训装置功能齐全㊁运行可靠,能满足现代电梯安装维修人员的培训要求[6⁃10]㊂近年来,国内多所高校依托学科竞赛开展实验教学探索和改革,都取得了一定的成果[11]㊂笔者探讨的实训平台基于 西门子杯”中国智能制造挑战赛工业自动化赛项的电梯仿真软件训练,结合5层电梯实训模型进行实际操作训练,打造一款虚拟仿真与实操相结合的实训平台,加深学生的学习印象,增强学生的学习兴趣,达到了良好的教学实训效果㊂1 虚拟仿真模型1.1 仿真模型原理该仿真模型以三维虚拟仿真形式呈现,主要由电梯整体(包括轿厢㊁电机㊁限位开关额定)㊁各楼层按钮(上下行呼梯按钮及指示灯等)㊁电梯内部设备(轿厢开关门按钮㊁轿厢选层按钮及指示灯等)等组成,电梯模型原理示意图如图1所示㊂图1 电梯模型原理示意图Fig.1 Diagram of the principle of the elevator model 1.2 仿真模型功能该仿真模型可实现单部6层电梯的运行控制模拟,也可实现多部多层集群控制,模型布局如图2所示㊂仿真软件支持Windows XP 以上环境,仿真界面如图3所示㊂ 图2 模型布局 图3 仿真软件运行界面 Fig.2 The model layout Fig.3 The interface of the simulation software该仿真模型还包含乘客行为模型,可模拟现实情况下大量乘客使用电梯的典型场景㊂乘客行为模型可作为电梯运动测试案例,用以评估控制程序设计是否合理㊂该模型根据不同楼层的客户需求及时响893吉林大学学报(信息科学版)第39卷应,实现自动平层㊁快关门㊁超重提示㊁上线限位和层门连锁保护等功能㊂2 模拟仿真实现过程2.1 逻辑控制流程电梯开始启动,判断是否复位,若无指示信号直接进入运行模式,有开关门信号指示时执行上行或下行控制,若无开关门信号指示则进入休眠状态,120s 后,若无信号指示则关闭照明及风扇节能㊂若有上行信号指示则进入上行状态,此时又有在该楼层之上或下的楼层呼叫信号时,优先服务当前上行,即根据最早登记的信号(指令信号,呼梯信号)决定电梯的上行或下行㊂下行同理㊂具体运行流程图如图4所示㊂图4 电梯模拟运行流程图Fig.4 Elevator simulation running flowchart 2.2 信号处理原则根据最早登记的信号(指令信号,呼梯信号)决定电梯的上行或下行,关门未到位禁止运行,满足首个信号确定方向后,电梯运行过程中同向信号先执行,反向信号后执行(暂时记忆),一个方向执行结束后才换向执行反向信号;即电梯在上行时,优先服务上行信号,在电梯下行时优先服务下行信号㊂处理原则如图5所示㊂图5 信号处理原则Fig.5 Signal processing principles 2.3 开关门逻辑控制到达某一层响应了该层的信号要求,则开门到位5s 后关门,关门指示灯闪烁,当长按开门按钮则开门等待(轿门自动打开),或遇到红外光幕信号未响应㊁超重感应器动作则开门等待,自动状态下,在保持开门状态时,可按关门按钮立即响应关门动作㊂电梯停在门区时,可以在轿厢中按开门按钮使电梯已经关闭或尚未关闭的门重新打开㊂开门等待信号关闭3s 后,关门电梯未起动且门已关上或正在关闭时,如果本层召唤按钮被按下,则电梯门打开㊂如果按住按钮不放,门保持打开㊂电梯开关门逻辑控制流程图如图6所示㊂993第4期梁亮,等:基于虚拟仿真模型的PLC 实训平台图6 电梯开关门逻辑控制流程图Fig.6 Elevator switch door logic control flowchart 3 电梯实训平台搭建3.1 电梯模型结构该电梯实训模型共设有5层,与虚拟仿真模型内电梯层数相同,如图7所示㊂电梯结构分为电梯模型机架㊁牵引电机㊁轿厢㊁轿厢轨道㊁配重铁和配重铁轨道等㊂图7 电梯模型结构Fig.7 Elevator model structure 3.2 硬件系统设计该5层电梯模型运行过程中共包含31点的开关量及模拟量输入信号和17点的开关量输出信号,采用西门子S7⁃1200控制器及其扩展I /O 模块,系统原理如图8所示㊂图8 实训平台硬件系统原理图Fig.8 Practical platform hardware system schematic 004吉林大学学报(信息科学版)第39卷3.3 触摸屏监控画面设计为使教学更接近实际生产应用,电梯模型运行过程中,选择触摸屏进行运行监控㊂为保证监控系统的严谨,设计了监控系统进入流程和不同的监控画面切换㊂其中包含有电梯监控系统登录画面,如图9所示;设置登录密码,保证监控系统的安全性;登录后进入电梯监控主画面,操作人员可从该画面中选择所要观察的监控状态画面,如图10所示;监控状态总览画面可观测当前电梯的运行状态,如图11所示;电梯运行监控画面可观测电梯当前运行参数,如图12所示;外呼状态监控画面可观测电梯每层呼叫状态,如图13所示;运行数据记录画面显示电梯的运行状态是否正常,为检修提供依据,如图14所示㊂ 图9 监控系统登录画面 图10 监控主画面 Fig.9 Login screen of the monitor system Fig.10 Monitor the main screen 图11 监控状态总览画面 图12 电梯运行状态画面 Fig.11 Monitor the status overview screen Fig.12 Elevator operating status screen 图13 外呼状态监控画面 图14 数据记录画面 Fig.13 External call status monitoring screen Fig.14 Data recording screen3.4 系统运行测试基于虚拟仿真的结果,在该电梯实训平台上测试仿真模型的程序设计效果㊂虚拟仿真模型中的乘客行为模型由人为随机模拟,经测试结果对比分析可知,由于仿真系统设置的乘客候梯时间与现实中人为呼梯时间有一定差异,导致仿真模型电梯完成载客所用时间与实际电梯模型运行时间有所差异㊂但从理论到实践的验证过程使学生体验了控制系统设计的过程,使学生对PLC 技术的基础知识掌握更扎实,系统地提高了学生对PLC 技术和电气控制的能力㊂4 结 语本电梯实训平台结合了虚拟仿真训练环境,实现了从理论到实践的良好结合㊂可编程逻辑控制系统设计是反复训练修改的过程,本实训平台为学生的可编程逻辑控制技术的学习提供了良好的训练方式,104第4期梁亮,等:基于虚拟仿真模型的PLC 实训平台204吉林大学学报(信息科学版)第39卷学生从中可反复训练,纠错及修改,学习系统设计的规则㊂经过本实训平台的实践学习,学生可掌握电梯控制的基本技术,为以后自身就业储备一项优秀技能㊂参考文献:[1]李自成,孔庆尧,王后能,等.电气控制与PLC多层次实践教学平台的构建[J].实验室研究与探索,2020,39(11): 212⁃215.LI Zicheng,KONG Qingyao,WANG Houneng,et al.Construction of Electrical Control and PLC Multi⁃Level Practical Teaching Platform[J].Research and Exploration in Laboratory,2020,39(11):212⁃215.[2]张泉灵,洪艳萍.智能工厂综述[J].自动化仪表,2018,39(8):1⁃5.ZHANG Quanling,HONG Yanping.Intelligent Plant Review[J].Process Automation Instrumentation,2018,39(8):1⁃5.[3]王天然,库涛,朱云龙,等.智能制造空间[J].信息与控制,2017,46(6):641⁃645.WANG Tianran,KU Tao,ZHU Yunlong,et al.Smart Manufacturing Space[J].Information and Control,2017,46(6): 641⁃645.[4]朱奎林.基于PLC控制模型电梯的开发[J].电子设计工程,2018,26(1):166⁃169.ZHU Kuilin.The Development of Model Elevator Based on PLC Control[J].Electronic Design Engineering,2018,26(1): 166⁃169.[5]张小明.电梯控制技术[M].北京:北京邮电大学出版社,2014.ZHANG Xiaoming.Elevator Control Technology[M].Beijing:The Press of Beijing University of Posts and Telecommunications,2014.[6]王成福.基于Q系列PLC的电梯教学实训装置设计[J].工业和信息化教育,2015(12):62⁃68,76. WANG Chengfu.The Design of the Elevator Teaching and Training Device Based on Q Series PLC[J].Industrial and Information Education,2015(12):62⁃68,76.[7]浙江大学罗克韦尔自动化技术中心.可编程序控制器系统[M].杭州:浙江大学出版社,2005:64⁃80. Rockwell Automation Technology Center of Zhejiang University.The Programmable Controller System[M].Hangzhou:The Press of Zhejiang University,2005:64⁃80.[8]黄桂梅,刘永立.PLC电梯控制系统的设计与实践[J].制造业自动化,2007,29(4):81⁃82.HUANG Guimei,LIU Yongli.The Design and Practice of Elevator Control System with PLC[J].Manufacturing Automation, 2007,29(4):81⁃82.[9]陈新,李子乐,张扬.PLC虚实仿真实训平台的研究与应用[J].教育教学论坛,2020(30):391⁃392. CHEN Xin,LI Zile,ZHANG Yang.Research and Application of PLC Virtual Reality Simulation Training Platform[J]. Education Teaching Forum,2020(30):391⁃392.[10]李继芳,许英杰,鲍平,等.虚拟仿真被控对象在PLC实践教学中的应用研究[J].实验技术与管理,2017,34(6): 114⁃118.LI Jifang,XU Yingjie,BAO Ping,et al.Research on Application of Virtual Controlled Object in PLC Practical Teaching[J]. Experimental Technology and Management,2017,34(6):114⁃118.[11]李秋明,宋昕,刘志刚,等.依托智能制造挑战赛培养大学生工程实践创新能力[J].实验室研究与探索,2018, 37(11):190⁃193.LI Qiuming,SONG Xin,LIU Zhigang,et al.Training College Students’Engineering Practice Innovation Ability Based on Intelligent Manufacturing Challenge[J].Research and Exploration in Laboratory,2018,37(11):190⁃193.(责任编辑:刘俏亮)。
半实物网络控制系统仿真平台设计
制单元为被控 对象 , 仿真 条件更接近于实际工程背景 。
1 实现 方案
.
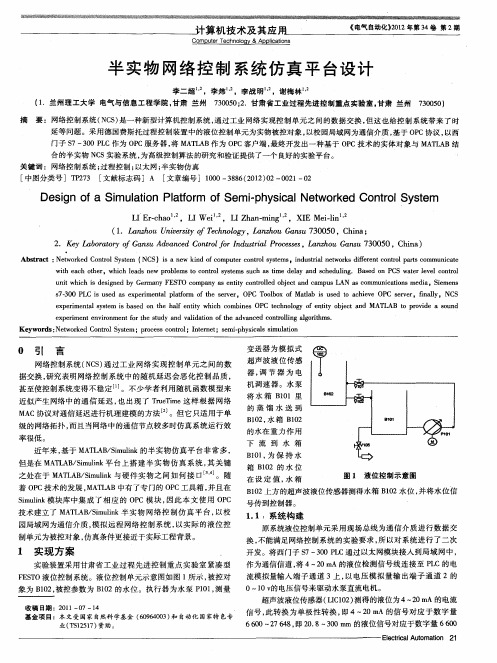
实验装置 采用甘肃省工 业过程 先进 控制重 点实 验室 紧凑 型 F S O液位控制 系统 。液位 控制单元示意 图如 图 1 ET 所示 , 被控 对 象为 B 0 , 12 被控参数为 B 0 12的水 位 。执行 器为 水泵 P 0 , 量 11测
epr et yt ae nteh le tyw i o bn sO C tcnl yo ni bet n T A opoieasud xe m n ss m i b sdo a n t hc cm ie P eh oo f tyojc a dMA L B t rvd on i l a e s h f i h g e t
s - 0 L su e s e p rme tl p afr f t e sr e ,OP o l o fMalb i u e o a h e e OP e v r i al ,NC 7 3 0 P C i s d a x e i n a lto m o h e v r C T o b x o t s s d t c iv C s r e ,f l a n y S
Abtat: e okdC nr yt ( C )i anw k do m ue nrl yt s id si e ok ieet ot l at cm u i t s c N t re ot l s m N S s e i f o p tr o t s m ,n uta nt rs f rn cnr r o m nc e r w oS e n c c os e rl w df op s a
B 0 , 保 持 水 11 为
箱 B0 12的 水 位 在 设 定 值 , 箱 水 图 1 液位控制示意 图
基于虚拟仿真技术的PLC实验教学平台研究

1 研究背景及意义2011年-2014年,我校获首批国家千所示范校,其中机电技术应用专业被评为国家重点建设专业,2016年,机电专业又被评为省示范校重点建设专业,基于此,我校本着培养具有工匠精神的技术型职业人才的态度,现需要全面提高机电专业实训环境以及实训设备。
同时根据我校学生近几年的就业企业的情况来看,PLC在各企业中得到了广泛的应用,并且技术还在不断提高,但企业中PLC的被控对象多数是庞大的机器设备,存在于复杂的现场环境,如果要在实验室搭建被控对象,势必会耗费大量的人力、物力和财力,甚至会导致事故的发生。
但是,如果用计算机、组态软件等设备对被控对象进行仿真,模仿被控对象的运动过程,学生同样可以对控制过程有一个感性认识,更重要的是,在降低教学成本的同时,并没有降低实验教学的质量。
鉴于此,本文主要研究基于虚拟仿真和技术的PLC实验教学平台。
可编程控制器是电气控制系统的控制核心,它可以实时控制工业现场的各类设备,很方便的完成各类控制要求。
通过几十年的发展,PLC已经走进工业生产和日常生活的各个方面,各中等职业学校也因其重要性,逐渐将其加入到机电技术应用专业的教学计划中。
采用组态软件,可以通过计算机很方便地设计被控对象以及控制的动作过程,此方法不仅能够用于PLC实验的开展,更可以用于课题设计,由学生自行设计被控对象和动作画面,为本专业即将走上职业岗位的学生提供一个很好的实践操作平台。
2 PLC在中职学校实验教学的现状关于PLC课程,不同中职学校所授内容大致相同,主要针对某一品牌、某一型号为例,学习基本指令和部分高级指令,现今大部分中职学校选用的PLC品牌为三菱和西门子两种,学生通过一些实例设计,会进一步理解和掌握PLC的原理和操作。
其中实验教学内容基本会占到三分之二的课时。
在实验时,学生根据任务要求设置I/O分配表,并把程序下载至PLC中,然后连接被控对象,PLC上电后,观察被控对象动作过程是否和任务要求一致。
半物理仿真平台介绍资料

TY-RTSIM-2013半物理仿真平台简介TY-RTSIM-2013是由苏州同元软控信息技术有限公司研发的半物理仿真平台,致力于为各领域产品开发提供由数字化设计至试验测试过程的一体化设计方法和工具,以及提供产品全模型实时仿真、快速原型设计和硬件在回路测试的解决方案。
全模型实时仿真快速原型开发硬件在回路测试TY-RTSIM-2013支持用户基于Matlab/Simulink、MWorks、Dymola等图形化建模环境进行模型设计,实现了控制、液压、机械等多领域建模工具与实时仿真目标机的紧密集成,提供一个高易用性、高可靠性、高实时性的产品设计、仿真及测试验证平台。
TY-RTSIM-2013是具有自主知识产权、国内领先的半物理仿真平台产品,在航空、航天、兵器、船舶、车辆等领域具有广泛应用。
1.系统架构TY-RTSIM-2013采用“主机-目标机”的系统架构,由建模软件、平台综合管理软件、三维视景软件、仿真目标机与信号板卡、分布式组件等构成。
2.系统主要功能/性能/特点(1).支持多种建模环境,包括Matlab/Simulink、MWorks、Dymola等;(2).x86多核处理器,PCI系统总线,Linux/RTAI实时操作系统;(3).高实时性仿真,仿真周期≤1ms,具备任务优先级、线程、硬件中断等控制方式;(4).支持绝大多数主流厂商常规板卡和传感器板卡;(5).仿真机硬件系统开放性,支持用户自制板卡;(6).单/多模光纤反射内存方式数据通信,支持多节点的“星形”和“环形”分布式仿真架构;(7).软件易用性,主要体现于综合管理软件,包括:●显示界面中,控件拖拽操作●拖放式操作实现变量与显示控件关联、板卡通道与显示控件关联●用户简单操作实现专用仿真程序界面开发●具备批量试验、特定工况试验操作●具备多组曲线数据自动输入等功能●物理数据与电信号数据比例关系控制功能●板卡电信号输出范围锁定设置●提供软件外部功能扩展接口(8).半物理仿真数据同步驱动的场景动画;(9).兼用于信号测试系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
O car d and PLC .St u den t s c an car r y o ut a var i et y o f PL C exp er i me nt a l op er at i on i n t he si m ul at i on ex per i m en t pl at f or m, and t hr ou gh t he w or k o f PLC c on t r ol sy s t em of
加上由教 学仪 器公司专 门为P L C 教学设 计推 出的综合实验箱 ,这也是我校 自动 化P L C 实验室采用的方式 。P L C实验箱 可以实现如交通灯 、彩灯、电机等典型
的 、 较 为 简单 的P L C实验 的功 能 。对 于
一
好 、通 用性 强和操 作简便 等优 点被 广 泛 应用 于工 业生产控 制 的各个领 域 。
《 P L C& F A )2 O 1 S £ 月
半实物仿 真 的P L C 实验平 台
PL C Se mi — p h y s i c a l Si mu l a t i o n Ex p e r i me n t a l PI a 怕 r m
武汉 电 力职业 技 术学 院
Ab s t r a c t : B e c a u s e o f t h e l i mi t a t i o n s o f o b j e c t i v e c o n d i t i o n s u c h a s f u n d s a n d p l a c e , i t i s h a r d t o f i x r e a l c o n t r o l o b j e c t i o n i n t h e l a b o r a t o r y f o r P L C e x p e r i me n t . F o r t h a t maem i —ph y si cal s i m ul a t i on
ex pe r i m en t
Con f i gu r at i on s of t wa r e
PLC Si m ul at i ng
【 中图 分类 号 】T G5 9 6
目前工科 各大 专 院校的课 程设 置都增
加 了相 关的P L C 技 术的内容 l 。
2 PL C半 实物 仿真 原理
半实物 仿真 是将控制 器 ( 实物 )
P L C的应用 技术 实践 性 非常强 ,
实践环 节至 关重要 ,只 有通 过实验 或
些较 为复杂 的实验 对象 ,如 电梯 、
【 文 献标 识码 】B 文 章编 号 1 6 0 6 - 51 2 3( 2 01 5)0 4 - 0 0 7 9 — 0 4
1 引言
P L C即可编 程逻 辑控 制器 ,是 自 动控 制技 术 、计算机 技术 和通信 技术
三 者 结 合 的高 科 技 产 品 [ 1 ] 。 以其 可 靠性
变 电站 、物 流系 统等 ,这些对 象模 型
与在 计算机 上实现 的控制 对象 的仿真
WWW. C A 1 6 8 . C OM l 7 9
上 进 行多 种 PL C实 验操 作 ,并 通 过人 机 交互 界面 动 态显 示 PL C控 制系 统 的工 作情 况 。对 PL C控 制三层 电 梯模 型的 仿真 运行 表 明 ,该 方 法有 效提 高了 P L C实验 的教 学效 果 。 关 键词 :半实物 仿 真 组态 软件 PL C 仿真 实验
杨 帆
Yang F an
摘 要 :针对 高校 PL C实 验教 学 中受到 资金 、场所 等条 件 的限 制 ,难 以在实 验室 购置 某些 真 实控
制 对象 的 问题 , 提 出一 种利 用 l l O板 卡与 PL C ̄ 9 , 半 实物 仿 真实 验平 台 。学生 可在 该仿 真实 验 平台
t he d yn am i c di spl ay o f t h e m an —m ac hi n e i n t e r ac t i ve i n t er f ac e.The s i mu l a t i on sh ows t ha t r u n t h e PLC c on t r ol o f t hr ee l ay er el ev at or m od el , t hi s me t h od e fec t i v el y i m pr ov es t he PLC e x per i me n t t eac h i n g e fec t
进行 实际操作 ,才 能真正 掌握 可编程
控 制 器 技 术 。现 在 常 用 的P L C实 验 室 建设模 式是 购 买某 家公 司的P L C硬 件
价 格高 昂 ,体 积较大 ,一般 实验 室难
以 配 备 , 即使 有 ,台 套 数 也 很 少 ,难
以满足众 多学生 实验的需要 】 。为解 决这个 问题 ,在 原P L C实验设 备基 础 上 ,设 计 了半实 物P L C仿真 系统 ,作 为原P L C 实验的补充和扩展 。