1扩3异步串口扩展芯片GM8123中文资料
单片机扩展芯片8243的中文资料
单片机扩展芯片8243的中文资料单片机扩展芯片8243中文资料。
引言。
单片机扩展芯片8243是一款功能强大的芯片,它可以为单片机提供丰富的外设接口和功能扩展。
本文将介绍8243芯片的主要特性、应用领域以及使用方法,希望能为大家带来一些帮助。
一、8243芯片的主要特性。
1. 多种外设接口。
8243芯片集成了多种外设接口,包括GPIO口、SPI接口、I2C接口、UART接口等,可以方便地与各种外部设备进行通信和控制。
2. 大容量存储器。
8243芯片内置了大容量的存储器,包括闪存和RAM,可以存储大量的程序代码和数据,满足复杂应用的需求。
3. 强大的计算能力。
8243芯片采用高性能的处理器核心,具有强大的计算能力,可以处理复杂的算法和逻辑运算。
4. 低功耗设计。
8243芯片采用先进的低功耗设计,可以在保证性能的同时降低功耗,延长电池寿命。
5. 宽工作温度范围。
8243芯片具有宽工作温度范围,可以在-40°C到85°C的环境中稳定工作,适用于各种恶劣的工作环境。
二、8243芯片的应用领域。
1. 工业控制。
8243芯片可以应用于工业控制领域,用于控制各种机械设备和生产线,实现自动化生产。
2. 智能家居。
8243芯片可以应用于智能家居领域,用于控制家电设备、监控安防系统等,实现智能化的家居生活。
3. 汽车电子。
8243芯片可以应用于汽车电子领域,用于控制车载娱乐系统、车辆控制系统等,提升汽车的智能化水平。
4. 医疗设备。
8243芯片可以应用于医疗设备领域,用于控制医疗设备的运行和数据采集,提高医疗设备的智能化程度。
5. 物联网设备。
8243芯片可以应用于物联网设备领域,用于连接各种物联网设备,实现设备之间的互联互通。
三、8243芯片的使用方法。
1. 硬件设计。
在使用8243芯片时,首先需要进行硬件设计,包括外设接口的连接、电源电路的设计等。
根据具体的应用需求,设计合适的硬件电路。
2. 软件开发。
GM8123串口扩展程序(单通道)

void send0()
{
STADD1=0;
STADD0=0;
}
void send1()
{
STADD1=0;
STADD0=1;
delay(300);
SRADD1=0;
SRADD0=1;
}
void send2()
{
STADD1=1;
//两个串口的单片机板上实验时则不能,所以我认为必须同时指定。
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
uchar ser_receive=0;
uchar ser_flag=0;
sbit MS=P2^6;
STADD0=0;
delay(300);
SRADD1=1;
SRADD0=0;
}
void ser() interrupt 4
{
if(RI==1)
{
RI=0;
ser_receive=SBUF;
ser_flag=1;
}
}
void main() //主程序的作用是发送出字符或字符串以后再返回。
TL1 = 0xFD;
PCON=0x00;//SMOD=0;
delay(10);
send1();
delay(100);
RST=0;
delay(100);
RST=1;
delay(100);
REN=1;
TR1=1;
MS=1;
delay(100);
MAX813L芯片中文资料(看门狗及复位专用芯片)

MAX813L芯片中文资料(看门狗及复位专用芯片)1 MAX813L芯片及其工作原理1.1 MAX813L芯片特点· 加电、掉电以及供电电压下降情况下的复位输出,复位脉冲宽度典型值为200 ms。
· 独立的看门狗输出,如果看门狗输入在1.6 s未被触发,其输出将变为高电平。
· 1.25 V门限值检测器,用于电源故障报警、电池低电压检测或+5 V 以外的电源*。
· 门限电压为4.65V· 低电平有效的手动复位输入。
· 8引脚DIP封装。
1.2 MAX813L的引脚及功能1.2.1 MAX813L芯片引脚排列见图1—11.2.2 引脚功能及工作原理说明(1)手动复位输入端()当该端输入低电平保持140 ms以上,MAX813L就输出复位信号.该输入端的最小输入脉宽要求可以有效地消除开关的抖动。
与TTL/CMOS兼容。
(2)工作电源端(VCC):接+5V电源。
(3)电源接地端(GND):接0 V参考电平。
(4)电源故障输入端(PFI)当该端输入电压低于1.25 V时,5号引脚输出端的信号由高电平变为低电平。
(5)电源故障输出端()电源正常时,保持高电平,电源电压变低或掉电时,输出由高电平变为低电平。
(6)看门狗信号输入端(WDI)程序正常运行时,必须在小于1.6 s的时间间隔向该输入端发送一个脉冲信号,以清除芯片部的看门狗定时器。
若超过1.6 s该输入端收不到脉冲信号,则部定时器溢出,8号引脚由高电平变为低电平。
(7)复位信号输出端(RST)上电时,自动产生200 ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
(8)看门狗信号输出端()正常工作时输出保持高电平,看门狗输出时,该端输出信号由高电平变为低电平。
2 MAX813L典型电路设计2.1 基本工作原理工业环境中的干扰大多是以窄脉冲的形式出现,而最终造成微机系统故障的多数现象为“死机”。
SG2813中文资料
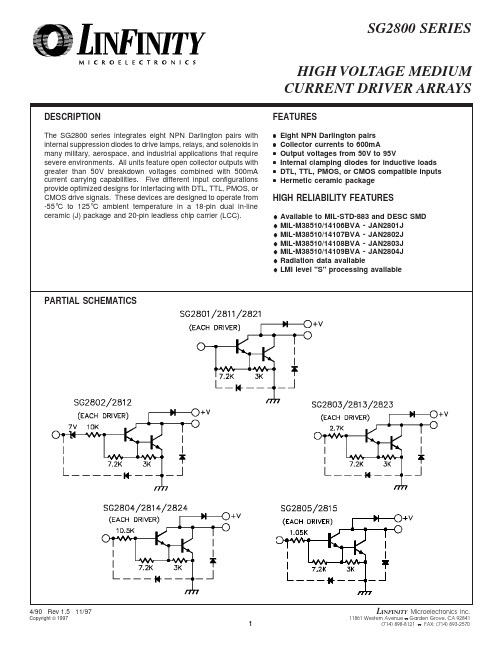
DESCRIPTIONThe SG2800 series integrates eight NPN Darlington pairs with internal suppression diodes to drive lamps, relays, and solenoids in many military, aerospace, and industrial applications that require severe environments. All units feature open collector outputs with greater than 50V breakdown voltages combined with 500mA current carrying capabilities. Five different input configurations provide optimized designs for interfacing with DTL, TTL, PMOS, or CMOS drive signals. These devices are designed to operate from -55°C to 125°C ambient temperature in a 18-pin dual in-line ceramic (J) package and 20-pin leadless chip carrier (LCC).FEATURES•Eight NPN Darlington pairs•Collector currents to 600mA•Output voltages from 50V to 95V•Internal clamping diodes for inductive loads •DTL, TTL, PMOS, or CMOS compatible inputs •Hermetic ceramic packageHIGH RELIABILITY FEATURES♦Available to MIL-STD-883 and DESC SMD♦MIL-M38510/14106BVA - JAN2801J♦MIL-M38510/14107BVA - JAN2802J♦MIL-M38510/14108BVA - JAN2803J♦MIL-M38510/14109BVA - JAN2804J♦Radiation data available♦LMI level "S" processing availableHIGH VOLTAGE MEDIUM CURRENT DRIVER ARRAYSPARTIAL SCHEMATICSABSOLUTE MAXIMUM RATINGS (Note 1)Continuous Collector Current, I C(SG2800, 2820) ......................................................(SG2810) ...............................................................Operating Junction TemperatureHermetic (J, L Packages) .........................................Plastic (N Package) ..................................................Storage Temperature Range ..........................Lead Temperature (Soldering 10 sec.) .........................Output Voltage, V CE(SG2800, 2810 series) ................................................(SG2820 series) ..........................................................Input Voltage, V IN(SG2802,3,4 series) ....................................................Continuous Input Current, I IN ........................................50V 95V 30V 25mA500mA 600mA 150°C 150°C -65°C to 150°C 300°CNote 1. Values beyond which damage may occur.J Package:Thermal Resistance-Junction to Case , θJC .................. 25°C/W Thermal Resistance-Junction to Ambient , θJA ...............70°C/W N Package:Thermal Resistance-Junction to Case , θJC .................. 30°C/W Thermal Resistance-Junction to Ambient , θJA .............. 60°C/W L Package:Thermal Resistance-Junction to Case , θJC .................. 35°C/W Thermal Resistance-Junction to Ambient , θJA .............120°C/WTHERMAL DATANote A.Junction Temperature Calculation: T J = T A + (P D x θJA ).Note B.The above numbers for θJC are maximums for the limitingthermal resistance of the package in a standard mount-ing configuration. The θJA numbers are meant to be guidelines for the thermal performance of the device/pc-board system. All of the above assume no ambient airflow.Output Voltage, V CESG2800, SG2820 series ..............................................SG2810 series .............................................................50V 95VPeak Collector Current, I CSG2800, SG2820 series .........................................SG2810 series ........................................................Operating Ambient Temperature Range ........350mA 500mA -55°C to 125°CNote 2. Range over which the device is functional.RECOMMENDED OPERATING CONDITIONS (Note 2)SELECTION GUIDEDevice V CE Max I C Max Logic Inputs SG280150V 500mA General Purpose PMOS, CMOS SG280250V 500mA 14V-25V PMOS SG280350V 500mA 5V TTL, CMOSSG280450V 500mA 6V-15V CMOS, PMOS SG281150V 600mA General Purpose PMOS, CMOS SG281250V600mA14V-25V PMOSDevice V CE Max I C Max Logic Inputs SG281350V 600mA 5V TTL, CMOSSG281450V 600mA 6V-15V CMOS, PMOS SG281550V 600mA High Output TTL SG282195V 500mA General Purpose PMOS, CMOS SG282395V 500mA 5V TTL, CMOSSG282495V500mA6V-15V CMOS, PMOSCHARACTERISTIC CURVESFIGURE 4.INPUT CHARACTERISTICS - SG2802FIGURE 5.INPUT CHARACTERISTICS - SG2803FIGURE 6.INPUT CHARACTERISTICS - SG2804FIGURE 7.PEAK COLLECTOR CURRENT VS. DUTY CYCLEFIGURE 1.OUTPUT CHARACTERISTICS FIGURE 2.OUTPUT CURRENT VS. INPUT VOLTAGE FIGURE 3.OUTPUT CURRENT VS. INPUT CURRENTNote 1. Contact factory for JAN and DESC product availability.2. All parts are viewed from the top.3. See Selection Guide for specific device types.CONNECTION DIAGRAMS & ORDERING INFORMATION (See Notes Below)AmbientTemperature Range Part No. (Note 3)PackageConnection Diagram18-PIN CERAMIC DIP J - PACKAGESG28XXJ/883B -55°C to 125°C JAN2801J -55°C to 125°C JAN2802J -55°C to 125°C JAN2803J -55°C to 125°C JAN2804J-55°C to 125°C SG2803J/DESC -55°C to 125°C SG2821J/DESC -55°C to 125°C SG2823J/DESC -55°C to 125°C SG2824J/DESC -55°C to 125°C SG28XXJ-55°C to 125°C18-PIN PLASTIC DIP N- PACKAGESG2803N 0°C to 70°C SG2823N 0°C to 70°C 20-PIN CERAMICLEADLESS CHIP CARRIER L- PACKAGESG28XXL/883B -55°C to 125°C SG2803L/DESC -55°C to 125°C SG2821L/DESC -55°C to 125°C SG2823L/DESC -55°C to 125°C SG2824L/DESC -55°C to 125°C SG28XXL-55°C to 125°C1849319201214151716876513121110176543281110121314151716918。
GM8141_GM8142(SPI扩四串口芯片中文手册)
6.4
SPI 接口参数.......................................................................................................... 20
7 机械尺寸 ....................................................................................................:2006 年 6 月
由成都国腾微电子有限公司发布
由上海福:跃电子 负责全面代理销售
成都国腾微电子有限公司版权所有。
数据手册
第 1 页 共 23 页
2006 年 6 月
This specification are subject to be changed without notice. Any latest information please preview
4.2
工作模式................................................................................................................... 5
4.2.1 基本操作........................................................................................................... 5
4.5.1 软件 shutdown 条件及步骤 ........................................................................... 12
GM8125串口扩展芯片

4.2 多通道工作模式
当模式控制引脚 MS = 0 时,芯片工作在多通道工作模式下,多通道模式允许 5 个子串口同
时全双工地工作。在该工作模式下,芯片的地址线 STADD2~0 是输入口,由 MCU 控制选择希
望发送数据的子串口,地址线 SRADD2~0 是输出口,用于向 MCU 返回接收到数据的子串口地
址。注意:通讯时不能将 STADD 置为‘000’。
各地址线定义如表 3 和表 4 所示:
表 3 多通道工作模式下子串口发送地址线定义
STADD2 STADD1 STADD0
定义
0
0
1
选择子串口 1 发送
注意:由于母口波特率是子口波特率的 6 倍,母口发送 6 帧的时间子口才能发送一帧,所 以若只需要对一个子口进行连续发送,则必须对母口发送进行延时操作,延时可采用延时程序 实现,也可通过对母串口发送无效数据来实现,具体方法为将地址线 STADD 置为全 0,然后对 母串口写 0x00。例如只需要对子串口 2 连续写两帧数据,则先向子串口 2 发送一帧数据,然后 将地址线置为 0,MCU 发送 5 个 0x00,然后再向子串口 2 发送第二帧数据,若不进行延时操作 或发送延时数据不为 0x00 将导致不可预料的结果。只向一个子串口连续发数据的时序如图 5 所 示。如果需要向所有子串口发送,则不需要延时操作,只需要依次向各个子串口发送即可。
成都国腾微电子有限公司
GM8125
1 概述
GM8125 可以将一个全双工的标准串口扩展成 5 个标准串口,并能通过外部引脚控制串口 扩展模式:单通道工作模式和多通道工作模式,即可以指定一个子串口和母串口以相同的波特 率单一的工作,也可以让所有子串口在母串口波特率基础上分频同时工作。
串口扩展方案总结
串口扩展方案总结串行接口设备凭借其控制灵活、接口简单、占用系统资源少等优点,被广泛应用于工业控制、家庭安防、GPS卫星定位导航以及水、电、气表的抄表等领域。
在这些嵌入式系统中,可能会有很多从设备都通过串行接口与主机进行通信,如GPRS MODEM、红外发送和接收模块、RS485总线接口等。
这使得开发人员常常面临嵌入式系统中主机串行通信接口不足的问题,针对此问题,本文介绍了几种常见的解决方法。
软件模拟法软件模拟法可根据串行通讯的传送格式,利用定时器和主机的I/O口来模拟串行通讯的时序,以达到扩展串口的目的。
接收过程中需要检测起始位,这可以使用查询方式,或者,在端口具有中断功能的主机中也可以使用端口的中断进行处理。
接收和发送过程中,对定时的处理既可以使用查询方式也可以使用定时器中断方式。
为了确保数据的正确性,在接收过程中可以在检测异步传输的起始信号处加上一些防干扰处理,如果是无线传输系统,在接收每个位时可以采用多次采样。
对于有线系统来说,1次采样就够了,你看IIC,SPI等,谁去进行了多次采样。
如今软件模拟以其价格低廉,使用方便,已经成为一种潮流.但是不是所有的单片机都适合用来进行串口的软件模拟的.软件模拟的方法一般有两种,一种是读写I/O,另外一种是读写端口.很容易想到采用读写端口的方式模拟的方式,各串口的波特率必须保持一致.而且当各路数据的输入时间差只有那么几十微秒时,很容易造成数据丢失,虽然看上去这种方式也可以承受输入数据端短路的高数据量压力测试,但这种测试方法是刚好落在了该方案的最佳输入点上.所以真正的使用中是有几率出错的.而采用我们PDK80CXX系列在进行8路以下(4路全双工通讯)的串口模拟时,完全可以采用读写I/O口方式来完成,这样,我们可以非常轻松完成个子口的波特率不等的设置.而且可以达到非常高的速率,当外接8MHz的晶体时,3路子口的最高速度可以达到38400以上.我想就是38400的波特率一般的单片机也就足够了.俗话说,"打铁还需墩子硬",而我们PDK80CXX都是工业规格设计,超强的抗干扰性,超宽的高低温工作范围.不知道各位看官目前有没有用过可以在-40~+120摄氏度工作的单片机.所以采用PDK80CXX模拟串口扩展无疑是目前性价比最高的一种解决方案.利用并口转串口扩展串行口基于Intel8251的串行口扩展Intel8251是一种通用的同步/异步发送器(USART),它的工作方式可以通过编程设置,并具有独立的接收/发送器。
NUC123中文手册
ARM Cortex™-M0 32位微控制器
NuMicro™ 家族 NUC123 系列 规格书
The information described in this document is the exclusive intellectual property of Nuvoton Technology Corporation and shall not be reproduced without permission from Nuvoton.
5.3
系统管理器 .................................................................................................................... 28
5.3.1 5.3.2 5.3.3 概述 ................................................................................................................................ 28 系统复位 ......................................................................................................................... 28 系统电源分配 .................................................................................................................. 28
1扩5异步串口扩展芯片GM8125中文资料

1概述GM8125可以将一个全双工的标准串口扩展成5个标准串口,并能通过外部引脚控制串口扩展模式:单通道工作模式和多通道工作模式,即可以指定一个子串口和母串口以相同的波特率单一的工作,也可以让所有子串口在母串口波特率基础上分频同时工作。
该芯片工作在多通道模式下时,子串口能主动响应从机发送的数据,并由母串口发送给主机,同时返回子串口地址。
该模式使每个从机的发送要求都能被及时地响应,即使所有从机同时有发送要求,数据也不会丢失,基本实现了主控单元和外设通讯的实时性。
该芯片母串口和子串口的工作波特率可由软件调节,而不需要修改外部电路和晶振频率。
该芯片的外部控制少,应用灵活,编程使用简单,适用于大多数有串口扩展需求的系统。
2特征——采用写控制字的方式对芯片进行控制——各子串口波特率可调(统一调节)——数据格式10位或11位可选——单通道模式下,最高波特率支持20Mbps;多通道模式下,子串口最高波特率38400bps ——子串口数:5个——由一个引脚选择芯片的工作方式是单通道工作模式还是多通道工作模式——在单通道工作模式下,芯片工作无需初始化设置,工作串口由地址线控制选择——在多通道工作模式下,各子串口的波特率等于母串口波特率的6分频——在多通道工作模式下,接收时地址线SRADD2~0向MCU返回接收子通道的地址,MCU 接收到母串口送来的数据后就可根据SRADD2~0状态判断数据是从哪一个子串口送来的;发送时先由MCU选择子串口再向母串口发送数据——与标准串口通讯格式兼容,TTL电平输出——宽工作电压:2.3~6.7V——输出波特率误差小于0.2%,输入波特率误差要求小于2.8%——每bit采样16次,提高数据正确性——输入地址引脚有50~80KΩPull-Down电阻,其它输入引脚有50~80KΩPull-Up电阻(OSCI除外)3封装及引脚功能说明GM8125提供多电源和单电源两种封装,并提供DIP、SDIP、SOP、SSOP等多种封装形式,用户可根据各自系统的应用环境选择不同等级的封装,引脚排布见图1所示:VDDMSSTADD0STADD1STADD2SRADD0SRADD2RSTRXD0TXD0RXD5RXD4RXD3RXD2RXD1TXD5TXD4TXD3TXD2TXD1OSCOOSCIVDDGNDMSSTADD0STADD1SRADD0SRADD1RSTRXD0TXD0RXD3RXD2TXD3TXD2OSCOOSCIGNDVDDNCVDDTXD4RXD4TXD5RXD5SRADD2STADD2图1 GM8125引脚排布图该芯片的各引脚功能描述见表1:表1 芯片引脚功能说明引脚名方向说明OSCO Out 振荡器输出;OSCI In 振荡器输入;TXD1 Out 子通道1的发送端口;RXD1 In 子通道1的接收端口;TXD2 Out 子通道2的发送端口;RXD2 In 子通道2的接收端口;TXD3 Out 子通道3的发送端口;RXD3 In 子通道3的接收端口;TXD4 Out 子通道4的发送端口;RXD4 In 子通道4的接收端口;TXD5 Out 子通道5的发送端口;GND 电源地;RXD5 In 子通道5的接收端口;TXD0 Out 母通道的发送端口;RXD0 In 母通道的接收端口;RST In 系统复位SRADD2 In/Out 接收子通道地址2;SRADD1 In/Out 接收子通道地址1; SRADD0 In/Out 接收子通道地址0; STADD2 In 发送子通道地址2; STADD1 In 发送子通道地址1; STADD0 In 发送子通道地址0;MS In 模式选择,MS =1,单通道工作模式;MS =0,多通道工作模式; 地址线为全‘0’时,MS 为命令字读写控制引脚,MS=1,读命令字,MS=0,写命令字; VDD电源电压;4 芯片功能详细描述4.1 单通道工作模式当模式控制引脚MS = 1时,芯片工作在单通道工作模式下,单通道模式在一个时刻只允许一组RXD 和TXD 与母串口进行通讯。
MEMORY存储芯片N25Q128A13EF8C0F中文规格书
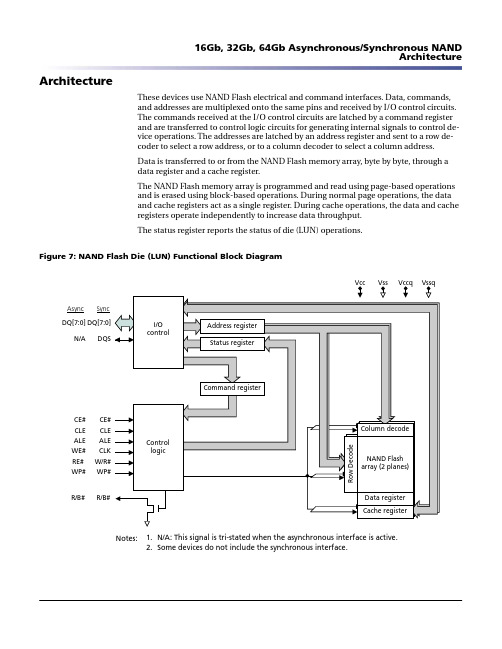
ArchitectureThese devices use NAND Flash electrical and command interfaces. Data, commands,and addresses are multiplexed onto the same pins and received by I/O control circuits.The commands received at the I/O control circuits are latched by a command register and are transferred to control logic circuits for generating internal signals to control de-vice operations. The addresses are latched by an address register and sent to a row de-coder to select a row address, or to a column decoder to select a column address.Data is transferred to or from the NAND Flash memory array, byte by byte, through a data register and a cache register.The NAND Flash memory array is programmed and read using page-based operations and is erased using block-based operations. During normal page operations, the data and cache registers act as a single register. During cache operations, the data and cache registers operate independently to increase data throughput.The status register reports the status of die (LUN) operations.Figure 7: NAND Flash Die (LUN) Functional Block DiagramCE#CLEN/A ALERE#WP#DQ[7:0]Async WE#R/B#CE#CLE DQSALE W/R#WP#DQ[7:0]SyncCLK R/B#Notes: 1.N/A: This signal is tri-stated when the asynchronous interface is active.2.Some devices do not include the synchronous interface.16Gb, 32Gb, 64Gb Asynchronous/Synchronous NAND Architecturedriver enables multiple R/B# outputs to be OR-tied. Typically, R/B# is connected to an interrupt pin on the system controller (see Figure 18 (page 28)).The combination of Rp and capacitive loading of the R/B# circuit determines the rise time of the R/B# signal. The actual value used for Rp depends on the system timing re-quirements. Large values of Rp cause R/B# to be delayed significantly. Between the 10-to 90-percent points on the R/B# waveform, the rise time is approximately two time constants (TC).TC = R × CWhere R = Rp (resistance of pull-up resistor), and C = total capacitive load.The fall time of the R/B# signal is determined mainly by the output impedance of the R/B# signal and the total load capacitance. Approximate Rp values using a circuit load of 100pF are provided in Figure 23 (page 31).The minimum value for Rp is determined by the output drive capability of the R/B# sig-nal, the output voltage swing, and Vccq.Rp =Vcc (MAX) - Vol (MAX)IOL + ΣilWhere Σil is the sum of the input currents of all devices tied to the R/B# pin. Figure 18: READ/BUSY# Open Drain16Gb, 32Gb, 64Gb Asynchronous/Synchronous NAND Bus Operation – Asynchronous InterfaceREAD PAGE CACHE SEQUENTIAL (31h)The READ PAGE CACHE SEQUENTIAL (31h) command reads the next sequential page within a block into the data register while the previous page is output from the cache register. This command is accepted by the die (LUN) when it is ready(RDY = 1, ARDY = 1). It is also accepted by the die (LUN) during READ PAGE CACHE (31h, 00h-31h) operations (RDY = 1 and ARDY = 0).To issue this command, write 31h to the command register. After this command is is-sued, R/B# goes LOW and the die (LUN) is busy (RDY = 0, ARDY = 0) for t RCBSY. After t RCBSY, R/B# goes HIGH and the die (LUN) is busy with a cache operation(RDY = 1, ARDY = 0), indicating that the cache register is available and that the specified page is copying from the NAND Flash array to the data register. At this point, data can be output from the cache register beginning at column address 0. The CHANGE READ COLUMN (05h-E0h) command can be used to change the column address of the data being output from the cache register.The READ PAGE CACHE SEQUENTIAL (31h) command can be used to cross block boundaries. If the READ PAGE CACHE SEQUENTIAL (31h) command is issued after the last page of a block is read into the data register, the next page read will be the next logi-cal block in the plane which the 31h command was issued. Do not issue the READ PAGE CACHE SEQUENTIAL (31h) to cross die (LUN) boundaries. Instead, issue the READ PAGE CACHE LAST (3Fh) command.If the READ PAGE CACHE SEQUENTIAL (31h) command is issued after a MULTI-PLANE READ PAGE operation (00h-32h, 00h-30h), the next sequential pages are read into the data registers while the previous pages can be output from the cache registers.After the die (LUN) is ready (RDY = 1, ARDY = 0), the CHANGE READ COLUMN EN-HANCED (06h-E0h) command is used to select which cache register outputs data.Figure 47: READ PAGE CACHE SEQUENTIAL (31h) OperationPage M Page M+116Gb, 32Gb, 64Gb Asynchronous/Synchronous NAND Read Operations。
基于GM812X芯片的多串口扩展技术应用
0 引 言
R 一3 S2 2协议作 为 一种 串行 通 信标 准 因其 简 单 实 用得到了广泛的应用 , 乎所有 生产 厂家都 推 出了 支 几 持 2 2串行总线标准 接 口的设备 , 3 因此 串 口通信 也在 数据采集中得 到了广 泛 的应用 , 实践证 明基 于 R -3 S2 2 的数据采集是高效可靠 的。但是 , 目前的 MC U串 口数 量 一般 只有一个 , 因此在 多路 数据 采集 系统 巾如 何合
关 键词 :串 口扩展 数据 采集 条码 生成 单片 机 中图分 类号 i, 2 1 5 I I +.1 - P 文献标 识 码 : A
Ab ta : Va o ssrtge o e a ote p nso u rnl s d ae ito c d。a d tewo kn rn i l n h r ce siso ia b i sr ct i r u tae isfrs r lp r x a inc re tyu e r nrdu e i n h r ig p cpea d c aa tr t fChn — ul i i c t
a d c n e in e eo men n p lc to . n o v ne td v lp ta d a p iain
Ke wo d :S r l o x a so D t o lcin B rc d e e ai S n l h p c mp tr y r s e a r e p n in i pt aa c l t a o e g n r t n e o o i ge c i o ue
sra o x a so h p o e lp r e p n inc i fGM81 i t 2X hp fe pe e td i eal c i r rs ne n d t i.Ai n tt en e o aa a q iiin fo mutpe sra rs i otn i mig a h e d frd t c ust r m l l e lp t n c t o i i o o id sr n u ty。amut-e a- o aa a q iio n a o ea t- e eain s se i ui yc mbn n h e trs o h hp.Th e a o l s r lp r d t c st n a d b rc d uo g n r t y tm sb l b o ii gte fau e ft e c i i i t u i o t e sr lp r i t
成都国腾微电子 通用异步串口扩展芯片GM812X 说明书

成都国腾微电子有限公司GM812X 通用异步串口扩展芯片 应用手册 2004.2 GM812X 版本记录:1.0 当前版本时间:2004年2月 新旧版本改动比较: 旧版 文档页数 当前版本 文档页数 主题(和旧版本相比的主要变化) 如果您有技术、交付或价格方面的任何问题,请联系成都国腾微电子有限公司的相关办公室或当地的代理商,或访问我们的网站:www.gticc.com ,谢谢! 编制时间:2004年2月 由成都国腾微电子有限公司发布 发布地点:成都 成都国腾微电子有限公司版权所有。
1 概述GM812X系列串口扩展芯片可为用户提供最简单和高性能的通用串口扩展方案,该系列芯片子串口最高波特率达38400bps。
该芯片提供两种工作模式,用户可根据需要灵活选择。
该芯片母串口和子串口的工作波特率可由软件调节,而不需要修改外部电路和晶振频率。
GM812X系列芯片的外部控制少,应用灵活,编程使用简单,适合于大多数需要多串口扩展的应用场合。
2 应用说明2.1 硬件接口GM812X系列的典型应用如图1所示:图1 典型硬件接口电路图1中选用89C51作为系统的主机,通过GM8125扩展了5个子串口,5个子串口可以与5个从机相接。
如果用户只需要扩展3个串口,则可采用GM8123,硬件连接方法和GM8125相同。
2.2 程序示例2.2.1 单通道工作模式程序示例此程序应用的环境是5个从机分别以1200、2400、4800、9600、19200bps的波特率工作,并且主机与5个从机的数据通讯采用分时的方式,即每次只对一个从机发送和接收数据。
程序以C51为例:/**************************************************************//*CPU:AT89C51 *//*晶体频率:22.1184MHz *//*机器周期:0.54uS *//*语言:C51 *//**************************************************************/#include <reg51.h>#define DELAY_TIME 60000 //Delay time/**********************I/O定义***********************/sbit MS=P3^6; //GM8125工作模式控制sbit RESET=P3^7; //GM8125复位引脚控制/******************数据变量定义*****************/unsigned char SendBuff[5]={0xaa,0x45,0x67,0xbc,0xc9};unsigned char ReceiveBuff[5]={0x00,0x00,0x00,0x00,0x00};unsigned char i=0 ,j=0 ,k=1,c=0;/*********************************************//*函数名称:delay.C *//*函数功能:延时程序 *//*********************************************/void delay(unsigned int m){unsigned int n;n=0;while(n < m){n++;}return;}/******************************************************//*函数名称: MAIN.C *//*函数功能:主机主程序 *//*********************************************/void main(void){TMOD = 0x20; //指定定时器1工作在方式2IE = 0x90; //开串行口中断SCON=0xc0; //串行口工作在方式3for(c=0;c<5;c++) //选择5个子串口以5种不同波特率工作{switch(c){case 0:{TH1=0xd0; //装入定时器1初值,设置工作波特率为1200bps TL1=0xd0;PCON=0x00;P1=0x11; //选择8125子通道1工作break;}case 1:{TH1 = 0xe8; //装入定时器1初值,设置工作波特率为2400bpsTL1 = 0xe8;PCON=0x00;P1=0x22; //选择8125子通道2工作break;}case 2:{TH1 = 0xf4; //装入定时器1初值,设置工作波特率为4800bpsTL1 = 0xf4;PCON=0x00;P1=0x33; //选择8125子通道3工作break;}case 3:{TH1 = 0xfa; //装入定时器1初值,设置工作波特率为9600bpsTL1 = 0xfa;PCON=0x00;P1=0x44; //选择8125子通道4工作break;}case 4:{TH1 = 0xfd; //装入定时器1初值,设置工作波特率为19200bpsTL1 = 0xfd;PCON=0x00;P1=0x55; //选择8125子通道5工作break;}default:break;}TR1=1; //启动定时器1MS=1; //GM8125工作在单通道工作模式下/*主控MCU发送/接收程序*/SBUF=SendBuff[i];while(TI==0);TI=0;i++;REN = 1;while(j!= k); //等待接收完成REN = 0; //停止接收k++;TR1=0; //T1停止}}void CommReceive(void) interrupt 4{if(RI){ReceiveBuff[j] = SBUF;RI = 0;j++;}}2.2.2 多通道工作模式程序示例此程序应用的环境是5个从机均以19200bps的波特率工作,要求主机对5个从机分别发送完数据后要等待从机向主机返回一个数据。
基于GM8123的串口扩展硬件解决方案

1
在某 些 特定 的情 况下 。 片机 应 用 系 统需 要 连 单 故选择 C1= 5n 。 9 1 F
321 ..1电容性 模式 检测 电容
;
个 单 片 机应 用 系统 通 过 串 行接 E 连 接 到 一 台 主 控 l
基 于智 能控制 器 IB FD G的荧光 灯 电子镇 流 C 1L 1
摘 要 :目前 。 于 串行接 口的扩展 解 决 方案 包括 : 用软件 虚 拟 串口和硬 件 接 口器件 扩 展 两 种 方 基 使
案 。前者 因为存 在 着较 为严 重 的误 码 概 率 , 能增加 系统 的使 用风 险。后 者 虽增加 了硬件 开销 , 可 却 可 以有 效降 低 系统 的误 码风 险 。 最新 的 G 1X扩 展 方案 在 不 明显增 加硬 件 开销 的 前提 下 , M8 2 可有 效 解 决通 信过程 中的误 码 问题 , 降低 系统 的软 件 风 险 , 高 系统 的 可 靠性 。通过 典 型应 用 实例 , 提 给
参考 文献 :
2V则 有 : ,
C1 = 9 8 C1 =A
=
△ B L 8
1 F 2V4 0V 7 F 5n x /1 = 3p 故 选择 C 86 F 1= 8p 。
321 2及 L 1与 L 2的选择 ..2 L 2 2
(1 1)
[】 兴 武 , 大 卫. 1 毛 祝 电子镇 流 器原 理与 制作[ . 京 : M】 北
器使 用 少 量 的元 件 , 即可 获 得 高 功 率 因数 、 预 热 灯
若I C引脚 1 ( E ) 的 A 电平 范 围 △ E 2R S 上 C R S
=
启 动 , 具 有 高安 全 性 和 可靠 性 。IB1L 1 并 C F 0 G不 仅
MAX813L芯片中文资料(看门狗及复位专用芯片)

MAX813L芯片中文资料(看门狗及复位专用芯片)1 MAX813L芯片及其工作原理1.1 MAX813L芯片特点· 加电、掉电以及供电电压下降情况下的复位输出,复位脉冲宽度典型值为200 ms。
· 独立的看门狗输出,如果看门狗输入在1.6 s内未被触发,其输出将变为高电平。
· 1.25 V门限值检测器,用于电源故障报警、电池低电压检测或+5 V 以外的电源*。
· 门限电压为4.65V· 低电平有效的手动复位输入。
· 8引脚DIP封装。
1.2 MAX813L的引脚及功能1.2.1 MAX813L芯片引脚排列见图1—11.2.2 引脚功能及工作原理说明(1)手动复位输入端()当该端输入低电平保持140 ms以上,MAX813L就输出复位信号.该输入端的最小输入脉宽要求可以有效地消除开关的抖动。
与TTL/CMOS兼容。
(2)工作电源端(VCC):接+5V电源。
(3)电源接地端(GND):接0 V参考电平。
(4)电源故障输入端(PFI)当该端输入电压低于1.25 V时,5号引脚输出端的信号由高电平变为低电平。
(5)电源故障输出端()电源正常时,保持高电平,电源电压变低或掉电时,输出由高电平变为低电平。
(6)看门狗信号输入端(WDI)程序正常运行时,必须在小于1.6 s的时间间隔内向该输入端发送一个脉冲信号,以清除芯片内部的看门狗定时器。
若超过1.6 s该输入端收不到脉冲信号,则内部定时器溢出,8号引脚由高电平变为低电平。
(7)复位信号输出端(RST)上电时,自动产生200 ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
(8)看门狗信号输出端()正常工作时输出保持高电平,看门狗输出时,该端输出信号由高电平变为低电平。
2 MAX813L典型电路设计2.1 基本工作原理工业环境中的干扰大多是以窄脉冲的形式出现,而最终造成微机系统故障的多数现象为“死机”。
GM8125产品简介

GM8125产品简介
GM8125可为用户提供最简单和高性能的串口扩展方案,该芯片子串口最高波特率支持20Mbps。
该芯片提供两种工作模式,用户可根据需要灵活选择。
该芯片母串口和子串口的工作波特率可由软件调节,而不需要修改外部电路和晶振频率。
GM8125芯片的外部控制少,应用灵活,编程使用简单,适合于大多数需要多串口扩展的应用场合。
★特性
·扩展5个子串口
·采用写控制字的方式对芯片进行控制
·各子串口波特率可调(统一调节)
·数据格式10位或11位可选
·两种工作模式,用户可根据自己的系统需求灵活选择.单通道模式下最高波特率支持20Mbps;多通道模式下最高波特率38400bps ·与标准串口通讯格式兼容
·宽工作电压
·工作温度范围:-40℃~85℃
·输出波特率误差小于0.2%,输入波特率误差要求小于2.8%。
嵌入式系统中扩展串行口的几种方法

为 000 时写命令字 引脚 MS 为 1 SP2338 唤醒 但由于 SP2338 的唤
STADD2 ̄STADD0 为 000 时读命令 醒时间需要 25ms 左右 故用于芯片
字 进行工作方式设置时 芯片的 唤醒的数据将不会被主机接收 因
帧格式和母串口工作波特率与上一 此 可以先发送一个字节数据用于
134 2006.7 电子设计应用
万方数据
嵌入式系统
讯 并且通讯过程完全由主机控制 的帧格式为11bit 母串口波特率为
的系统 多通道模式下 各子串口 7200bps
波特率相同 允许所有子串口同时
基于 SP2338 的串行口扩展
与母串口通讯 母串口以子串口波
S P 2 3 3 8 是采用低功耗 C M O S
参考文献 1. 刘毓梅等 通过异步串口扩 展芯片 GM8123/25 的原理和应用 成都国腾微电子公司 2004 2.李华艾编 Mcs-5系列单片机 实用接口技术 北京航空航天大学 出版社 2001
136
133 发出一个中断 调用中断例 程 利用掉电保护电路所维持的工 作时间保存当前打印位置 系统停 止工作 待重新上电后检测到 打 印未完成 标志 则读出最后一张 发票明细数据 从断电时记录的位 置继续打印出一张完整的发票 并 清除标志
相似文献(10条)
数据安全性处理 税控收款机集商务 税控 管 理等功能于一体 对数据的传输和 存储要求相当高 需要能够正确地 传输 存储 生成及反馈数据 因 此 对安全性的要求也相当高 本 系统的安全性设计从以下几个方面 来体现 系统中采取了用户权限分级管
理的方法 设置了三种具有不同操 作权限的角色 系统管理员 收款 员 税务稽查员 用户与角色关联 用户密码采用 6 位  ̄8 位数字 密码 以密文形式存储在Flash内 进入相 应的用户模式都要通过对应的密码 校验 才能够登录税控收款机 执 行本用户级的相应操作
GM8123在智能电动柜通信系统中的应用

4基 于 GM8 2 . 1 3的 串 口 扩展 41 .GM8 2 介 13简
G 8 2 可 以将一个全双工的标准 串口扩展成 3 M 13 个标准 串口, 并能 通过外部 引脚控制串 口扩展模式 : 单通道工作模式和多通道工作模式。 42G 13芯片工作模 式 . M8 2 () 1单通道工作模式 当模式控 制引脚 MS:1时 , 片工作在单通 道工作模式下 , 芯 单通 道模式在~个时刻只允许一组 R D和 T D与母 串 口进行 通讯 ,子串 X X 口最高波特率支持 2 Mb s 0 p。外部 MC U通过两根输 入地址线 和两根输 出地址线选择指定和母 串口连接的子 串口。 表 1G 13工作模式 M8 2
[ 关键词 ] M82 P 9 6 9 电动柜 G 13 8 C 6
1引 言 .
扩展。
智能电动推柜系统具有可视化人机操作 界面 ,它 的人性化表现为 具有可视化人机操作界面 , 特点就是通信控制板 能分别与 P C机 、 触摸 屏和备用设备独立地进行信息交换。主板 的核 心控制器采用具有 2个 增强型 U T的 P 9 6 9芯 片 , AR 8C6 既要构造 R 4 5总线 , S8 又要与 PC、 触 摸屏等设 备通信 , 串口显 然不够用 。通 过比较 ,在设计 中采用 了 2个 G 1 3通用 异步串口 l扩 3芯 片)将 P 9 6 9的 U R 0扩展成 3个 M8 2 ( , 8C6 AT 独立的 U R 分别 与 P 、 A T, C 触摸 屏及备用设备通信 , 从而实 现在 触摸显 示屏 或 P c等设备上直接控制智能电动推柜进行安全有效地移动 。 2电 动推 柜 系统 组 成 与功 能 . 智能电动推柜系统主要由触摸显示屏 、 通信控制板( 以下简称主板 ) 、 若干分散控 制板( 以下简称控制板 ) 及各种传感 器和执行机构等组成 。 主板通过 R 45 S 8 总线与安装 于各个柜子上的控制顿通信协 调各个柜子
无人机大气数据高速检测系统的设计

Abstract How to advance the test speed of air data(UAV)is an important item in improvement of flight
control s)rstem per formance. It’S difi cult to increase the data acquisition speed from data acquisition entrance when the sensor module has been chosen.A design method of data test system based on GM 8123 is provided, which applies serial port expansion technologies to real ize data transfer, acquisition and processing with high speed . rhis scheme is proved to be valuable in improvement of dynamic perform ance and testing precision for UAV test system .
基于GM8123的串口扩展硬件解决方案
基于GM8123的串口扩展硬件解决方案在某些特定的状况下,应用系统需要衔接多个串行外设,如微型打印机、液晶模块、上位计算机等,此种状况称为点对多点通信方式;或者多个单片机应用系统通过串行接口衔接到一台主控计算机上,称为多点对一点通信方式。
通常单片机只提供一个异步串行通信接口(SCI)。
因此,上述两种状况下,都涉及串行接口的扩展问题。
以下将针对点对多点通信的串口扩展,给出一种用法最新串口扩展接口器件GM8123的解决计划。
2 点对多点通信的硬件解决计划目前,点对多点通信在扩展串行接口时,除了用法软件虚拟的方式,将单片机的一般I/O虚拟为异步串行接口外,更多的是采纳硬件接口器件扩展办法。
而硬件扩展串行接口,一方面可采纳多路模拟开关,或用法门,按需要选通相应的串行通道,实现点对多点的通信;另一方面可用法专用的串口扩展器件扩展串行接口。
前者的主要问题是占用较多的单片机硬件资源,更重要的是通信过程中的实时性较差。
采纳最新的专用串口扩展器件可有效地解决上述问题。
3 基于GM812X的典型串口扩展电路GM812X是成都国腾公司生产的专用串口扩展器件,包括GM8123(一扩三)、GM8125(一扩五)两个主要型号。
GM8123可以将一个全双工的标准串口扩展成3个标准串口,并能通过外部引脚控制串口扩展模式:单通道工作模式和多通道工作模式,既可以指定一个子串口和母串口以相同的波特率工作,也可以让全部子串口在母串口波特率基础上分频同时工作。
母串口和子串口的工作波特率可由软件调整,而不需要修改外部电路和晶振频率。
图1为GM8123构成的典型串口扩展电路。
因为GM8123串口扩展器件不具有上电复位功能,因此用法单片机的P3.7控制GM8123的复位端,复位信号低电平有效,并保持200 ms。
器件复位后,内部全部的BUFFER和寄存器清零,此时器件的默认状态第1页共4页。
串口扩展芯片GM8125在多功能车载移动终端中的应用

串口扩展芯片GM8125在多功能车载移动终端中的应用曹忠成【摘要】当前,基于微处理器的嵌入式系统得到了广泛的应用,许多外围电路功能模块也具备了UART串口通讯功能,而现阶段的微处理器芯片通常只有1~2个串口,很少带有3个或3个以上的串口,很难满足多串口通讯的需要.基于此,介绍了一种1转5的串口扩展芯片GM8125,并分析了其功能特性.该方案已经成功应用到多功能车载移动终端中,并取得了满意的效果.【期刊名称】《现代电子技术》【年(卷),期】2006(029)013【总页数】3页(P132-133,136)【关键词】单片机;串口扩展;GM8125;车载终端【作者】曹忠成【作者单位】胜利油田,钻井工艺研究院,山东,东营,257017【正文语种】中文【中图分类】TN406多功能车载移动终端,主要由单片机及全球定位系统GPS模块、通用无线分组业务GPRS模块、指纹识别、汽车黑匣子等模块组成。
单片机与这些模块之间进行串行通讯,直接利用单片机的功能特点,无法满足这一需要,利用一片串口扩展芯片GM8125则可以很好地解决这个问题。
1 GM8125介绍GM8125具有将1个全双工串口扩展为5个全双工串口的功能,其封装形式有单电源和多电源之分。
多电源封装的GM8125 多用在航空等工程应用中,实际中采用的是单电源封装的GM8125 ,图1是其引脚图。
图1 GM8125引脚排列图5个子串口的波特率可调,最高可达38 400 b/s,通信协议的帧长度可调,分为10位1帧或者11位1帧两种模式。
GM8125共有6个串口,1个母串口,5个子串口,允许同时接收或者发送数据。
5个子串口分别与5个外围设备相连,母串口与单片机的串口相连,由此实现了只有1个串口的单片机与5个设备的连接。
GM8125 有3根发送地址线和3根接收地址线,用来确定数据的接收或者发送操作是发生在哪个子串口。
GM8125 扩展后,单片机向串口设备发送信息的过程如下:(1) 单片机先向地址STADD2~0 置入希望发送数据的子串口地址,再通过单片机的TXD口向母串口发送希望传输的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1概述GM8123可以将一个全双工的标准串口扩展成3个标准串口,并能通过外部引脚控制串口扩展模式:单通道工作模式和多通道工作模式,即可以指定一个子串口和母串口以相同的波特率单一的工作,也可以让所有子串口在母串口波特率基础上分频同时工作。
该芯片工作在多通道模式下时,子串口能主动响应从机发送的数据,并由母串口发送给主机,同时返回子串口地址。
该模式使每个从机的发送要求都能被及时地响应,即使所有从机同时有发送要求,数据也不会丢失,基本实现了主控单元和外设通讯的实时性。
该芯片母串口和子串口的工作波特率可由软件调节,而不需要修改外部电路和晶振频率。
该芯片的外部控制少,应用灵活,编程使用简单,适用于大多数有串口扩展需求的系统。
2特征——采用写控制字的方式对芯片进行控制——各子串口波特率可调(统一调节)——数据格式10位或11位可选——单通道模式下,最高波特率支持20Mbps;多通道模式下,子串口最高波特率38400bps ——子串口数:3个——由一个引脚选择芯片的工作方式是单通道工作模式还是多通道工作模式——在单通道工作模式下,芯片工作无需初始化设置,工作串口由地址线控制选择——在多通道工作模式下,各子串口的波特率等于母串口波特率的4分频——在多通道工作模式下,接收时地址线SRADD1~0向MCU返回接收子通道的地址,MCU 接收到母串口送来的数据后就可根据SRADD1~0状态判断数据是从哪一个子串口送来的;发送时先由MCU选择子串口再向母串口发送数据——与标准串口通讯格式兼容,TTL电平输出——宽工作电压:2.3~6.7V——输出波特率误差小于0.2%,输入波特率误差要求小于2.8%——每bit采样16次,提高数据正确性——输入地址引脚有50~80KΩPull-Down电阻,其它输入引脚有50~80KΩPull-Up电阻(OSCI除外)3封装及引脚功能说明GM8123提供多电源和单电源两种封装,并提供DIP、SDIP、SOP、SSOP等多种封装形式,用户可根据各自系统的应用环境选择不同等级的封装,引脚排布见图1所示:VDD GND MS STADD0STADD1SRADD0SRADD1RST RXD0TXD0RXD3RXD2RXD1TXD3TXD2TXD1OSCO OSCI VDD GND MS STADD0STADD1SRADD0SRADD1RST RXD0TXD0RXD3RXD2TXD3TXD2OSCO OSCI GND VDD GND*VDD NC NCNC GND*图1 封装引脚排布图该芯片的各引脚功能描述见表1:表1 芯片引脚功能说明 引脚名 方向 说明 OSCO Out 振荡器输出; OSCI In 振荡器输入;TXD1 Out 子通道1的发送端口; RXD1 In 子通道1的接收端口; TXD2 Out 子通道2的发送端口; RXD2 In 子通道2的接收端口; TXD3 Out 子通道3的发送端口; RXD3 In 子通道3的接收端口;GND 电源地;带‘*’的GND 引脚由于内部设计原因要求必须接地 TXD0 Out 母通道的发送端口; RXD0 In 母通道的接收端口; RST In 系统复位SRADD1 In/Out 接收子通道地址1; SRADD0 In/Out 接收子通道地址0; STADD1 In 发送子通道地址1; STADD0 In 发送子通道地址0;MSIn模式选择,MS =1,单通道工作模式;MS =0,多通道工作模式; 地址线为全‘0’时,MS 为命令字读写控制引脚,MS=1,读命令字,MS=0,写命令字;VDD电源电压;4 芯片功能详细描述4.1 单通道工作模式当模式控制引脚MS = 1时,芯片工作在单通道工作模式下,单通道模式在一个时刻只允许一组RXD 和TXD 与母串口进行通讯。
芯片的地址线用于选择希望和母串口相连接的子串口,外部MCU 通过两根输入地址线和两根输出地址线选择指定和母串口连接的子串口。
输入/输出地址线可以不相同,则连接到母串口上的RXD 和TXD 可以属于不同的子串口。
注意:通讯时不能将STADD 置为‘00’。
单通道工作模式各地址线定义如表2:表2 单通道工作模式下地址线定义STADD1STADD0 SRADD1SRADD0定义0 1 选择子串口1的RXD 1 0 选择子串口2的RXD 01~1111选择子串口3的RXD 0 1 选择子串口1的TXD 1 0 选择子串口2的TXD 1101~11选择子串口3的TXD其时序如图2和3所示:图 2 帧长为10bits 时的时序图图3 帧长为11bits时的时序图注:Tta:地址(SRADD/STADD)有效到输入数据有效的最小时间Ttb:MS有效到输入数据有效的最小时间Ttd:数据从一口接收到另一口发送的最大延迟时间4.2 多通道工作模式当模式控制引脚MS = 0时,芯片工作在多通道工作模式下,多通道模式允许3个子串口同时全双工地工作。
在该工作模式下,芯片的地址线STADD1~0是输入口,由MCU控制选择希望发送数据的子串口,地址线SRADD1~0是输出口,用于向MCU返回接收到数据的子串口地址。
注意:通讯时不能将STADD置为‘00’。
各地址线定义如表3和表4所示:表3 多通道工作模式下子串口发送地址线定义STADD1 STADD0 定义0 1 选择子串口1发送1 0 选择子串口2发送1 1 选择子串口3发送表4 多通道工作模式下子串口接收地址线状态SRADD1 SRADD0 说明0 1 当前接收到的数据是由子串口1接收的1 0 当前接收到的数据是由子串口2接收的1 1 当前接收到的数据是由子串口3接收的说明:多通道工作模式下,在进行数据通讯前要对芯片进行工作方式设置,对帧格式和通讯波特率进行设置。
(见工作方式设置)在该模式下,各子串口波特率相同,母串口的波特率等于子串口波特率的4倍。
比如设置了子串口和外围设备的通讯波特率为1200bps,则母串口波特率为1200×4=4800bps。
4.2.1母口接收子口发送流程详述MCU先向地址线STADD1~0置入希望发送数据的子串口地址,再通过MCU的TXD口向母串口发送希望传输的数据。
若需要对另一子串口发送数据,则需要MCU修改地址线STADD1~0的状态,此操作方法与单通道工作模式一样。
母口接收子口发送时序图如图4所示。
注意:由于母口波特率是子口波特率的4倍,母口发送4帧的时间子口才能发送一帧,所以若只需要对一个子口进行连续发送,则必须对母口发送进行延时操作,延时可采用延时程序实现,也可通过对母串口发送无效数据来实现,具体方法为将地址线STADD置为全0,然后对母串口写0x00。
例如只需要对子串口2连续写两帧数据,则先向子串口2发送一帧数据,然后将地址线置为0,MCU发送3个0x00,然后再向子串口2发送第二帧数据,若不进行延时操作或发送延时数据不为0x00将导致不可预料的结果。
只向一个子串口连续发数据的时序如图5所示。
如果需要向所有子串口发送,则不需要延时操作,只需要依次向各个子串口发送即可。
图 4 母口(RXD0)接收时序图注:Tad:地址有效到母口接收数据的起始位的最小时间Tar:地址的最少保持时间图5 只向一个子串口连续发数据时序图4.2.2子口接收母口发送流程详述GM8123子串口可主动响应从机的发送要求,只要芯片工作在多通道模式下,子串口不需要控制就可以主动接收从机送来的数据,同时由母串口发送给主机,并将SRADD1~0置成该子串口地址,主机接收到这帧数据后,可通过对SRADD1~0的检测判断该数据来自哪一个子串口,从而对这帧数据进行相应处理。
芯片内部采用对各子串口顺序检测的方式,即先检测子串口1,再检测子串口2,直到子串口3,先检测的子串口有数据则先发送,无数据就检测下一子串口。
子口接收母口发送时序图如图6所示:图 6 子口接收母口发送时序图注:Tda:一帧数据发送结束,对应子口地址保持最小时间4.3 外部复位功能外部MCU可以通过向RST引脚产生一个低电平使该芯片复位,复位信号将延时200ms,复位后芯片内部所有BUFFER和寄存器内的数据都将被清零。
复位后芯片的默认状态参见表5;表5 复位后芯片的默认状态参数名默认状态BR2~0 000(1200bps)FL 1(11bit一帧)注:该芯片不具备上电复位功能,用户在使用前必须通过复位引脚对芯片进行复位。
4.4 芯片的工作方式设置芯片的工作方式设置包括串口帧格式设置和通讯波特率设置。
芯片进行工作方式设置时,MS 为‘0’、STADD1~0为‘00’时写命令字,MS为‘1’、SRADD1~0和STADD1~0全为0时读命令字。
此时芯片的帧格式和母串口工作波特率与上一次进行数据通讯时一致,比如上一次通讯采用10bit一帧的格式,母串口波特率为9600bps,则写/读命令字也采用同样的帧格式和波特率(注意:复位后的帧格式为11bit,母串口波特率为4800bps)。
完成命令字的设置之后,必须将STADD1~0置为非全0的值后,设置才生效,此时才能按设置的格式进行数据通讯。
在单通道工作模式下,无需进行命令字设置,并且已设置的命令字不起作用,母口与对应的子通道可直接进行数据通讯,母口与对应的子通道的波特率、帧长都一样,即在MS=1时,芯片的母口与对应的子通道直通。
所以,用户若需要从多通道模式下转入单通道模式下工作,则必须等待GM8123的通讯完成之后才能将MS置1。
进行工作方式设置时可将RXD0的数据通过TXD0返回给MCU,以保证初始化可靠,即进行读命令字操作。
注意:读命令字时地址线SRADD不能向MCU返回数据地址,用户要注意和多通道模式中的数据传输方式相区别。
具体设置方法为:将地址线STADD1~0全置为‘0’,外部MCU通过母串口写入控制命令对芯片进行设置。
设置流程参见图7:图7 功能设置流程图说明:1、先将地址线STADD1~0置为‘00’2、将MS置0,选择写入命令字。
3、对母串口写命令字,该命令字的值为功能寄存器相应位的设置值,但高4位必须全为‘1’,以便和无效数据相区别。
功能寄存器的结构如图8所示:图8 功能寄存器结构图9 写、读命令时序注:Tac:地址有效到发送命令字的最大时间Tmc:MS有效到开始传输命令字的最小时间帧长的设置:将地址线STADD1~0全置为‘0’,外部MCU可以通过母串口写入特定的控制命令对各串口进行帧长选择。
帧长选择是将芯片所有串口设置成标准的10位一帧或11位一帧的数据帧格式。
设置流程参见图7,功能寄存器结构参见图8,其中FL是用来设置帧长的位,为‘0’表示10bit,‘1’表示11bit。