MAX813L芯片中文资料(看门狗及复位专用芯片)
CAT811-MAX811(复位)

CAT811-MAX811(复位)4脚微控制器电源监控电路-CAT811/812特性z对以下电源进行精密监控:+5.0V (+/- 5﹪, +/- 10﹪, +/- 20﹪),+3.3V (+/- 5﹪, +/- 10﹪),+3.0V (+/- 10﹪) 和+2.5V (+/- 5﹪)z提供2种输出配置:-CAT811:低有效复位-CAT812:高有效复位z手动复位输入z在工业级温度范围的应用中可直接代替MAX811和MAX812 z Vcc低至1.0V时复位有效z6uA的电源电流z抗电源的瞬态干扰z紧凑的4脚SOT143封装z工业级温度范围:-40℃~+85℃应用z计算机z服务器z手提电脑z线调制解调器(Cable modem)z无线通信z嵌入式控制系统z白色家电z功率计z智能仪器z PDA和手持式设备描述CAT811和CAT812是微控制器监控电路,用来监控数字系统的电源。
在工业级温度范围的应用中可直接代替MAX811和MAX812。
CAT811和CAT812都含有手动复位输入管脚。
CAT811和CAT812产生一个复位信号,这个信号在电源电压低于预置的阈值时和电源电压上升到该阈值后的140ms内有效。
由于Catalyst半导体运用了底层浮动闸(floating gate)技术AE2TM,因此器件可以提供任何特定的复位阈值。
7个工业标准的阈值可支持+5.0V、+3.3V、+3.0V和+2.5V的系统。
CAT811的RESET是推挽输出(低有效),CAT812的RESET也是推挽输出(高有效)。
电源的快速瞬态变化可忽略,当Vcc低至1.0V时输出可保证仍处于正确状态。
CAT811/812可工作在整个工业级温度范围内(-40℃~+85℃),包含4脚SOT143的封装形式。
阈值后缀选择器指定阈值电压阈值后缀名称4.63V L4.38V M4.00V J3.08V T2.93V S2.63V R2.32V Z管脚配置订购信息在器件型号的空白处插入后缀(L, M, J, T, S, R或Z)。
双CPU(单片机)控制系统

摘要:针对重要系统可靠性要求,特设计了一种双CPU控制系统。
在该系统中,两个CPU彼此独立运行,可以自动或手动实现双机的主辅切换,只有主CPU能正常读写外部RAM数据和控制输出。
关键词双CPU 切换监控控制单片微机具有小巧灵活、易扩展成为功能强大的控制系统。
目前,一些监控终端以及许多独立的控制系统(如:发电机的微机励磁装置)多以单片微机为核心构成。
但由于诸如工作环境恶劣、电磁干扰等原因,即使使用按工业测控环境要求设计的单片微机也难以保证控制系统能长期可靠的运行,从而导致控制系统瘫痪。
这样,如何提高控制系统的可靠性,保证测控系统能正确稳定的运行就尤为重要。
显然,采用双CPU冗余设计是非常有效的一种解决办法。
由于单片微机的功能强大,价格低廉,为设计双机冗余系统提供了很好的条件。
为此,我们设计了一种由两片单片微机组成的双机容错系统,以比较简单和与传统的多CPU系统完全不同思路的设计方法实现了双机的互为备用及相互切换。
在该双机冗余系统设计中,其关键问题是双机系统的重构策略和双机系统的仲裁逻辑切换。
1 传统的多CPU系统设计方法传统的多CPU系统的常用设计方法有三种:①利用双口RAM实现CPU之间的通信。
双口RAM是一种高速的并行传输芯片,具有两套I/O口和竞争裁决电路,可以同时联接两个CPU,这样通过双口RAM可以实现多CPU之间通信。
②利用共享存的方法实现CPU之间的通信。
这种方法与上一种方法类似,所不同的是,上一种方法是利用双口RAM的竞争裁决电路实现对RAM的访问,而这种方法是利用不同的时序实现存共享的。
③利用总线方法实现CPU之间的通信。
通过接口芯片或CPU本身具备的SPI、I2C以及SMBus等接口实现CPU之间的通信。
2 该双CPU系统的结构和工作原理该双CPU控制系统与传统的多CPU系统的设计方法完全不同,它由两片Atmel公司生产的AT89C51 CPU构成,双机互为备用,彼此独立并行运行,硬逻辑切换。
公交车自动报站及汉字显示系统毕业设计[管理资料]
![公交车自动报站及汉字显示系统毕业设计[管理资料]](https://img.taocdn.com/s3/m/51b6edbcf7ec4afe05a1df66.png)
摘要智能公交系统是智能交通系统的重要研究内容,近年来出现了许多针对公交车辆智能化的研究与尝试,这其中就包括自动报站系统。
目前,国内只有北京、上海、深圳、广州、青岛等城市实现了利用 GPS 自动报站,许多中小城市的公交车仍旧是传统的人工按键报站,没有实现完全的智能化,给司乘人员带来了很大的不便。
因此,在中小城市中迫切需要智能化的公交车报站系统。
本文应用单片机技术、语音合成技术和点阵LED汉字显示技术设计了一种公交车语音报站和汉字显示系统,它能很好的模仿人完成报站任务,从而解决了人工报站不准确不方便等问题。
本文设计的新型的公交车自动报站系统,以AT89S51单片机为核心,外扩ISD1730语音芯片,点阵LED汉字显示屏和行列驱动芯片。
当汽车到达某站时,通过GPS模块来触发本系统进行工作,通过语音输出电路进行语音报站和提示,AT89S51单片机同时通过程序读取汉字信息送入LED点阵显示电路进行汉字提示,达到了在车辆运行期间显示和语音的同步,提高了车辆的服务质量。
本文是以AT89C51为主控芯片的进行了系统硬件电路设计,分析并设计了各单元电路,包括语音电路、LED显示电路、电源电路。
利用C语言进行了程序设计,介绍了系统所采用的软件开发环境及其主程序设计,着重分析设计了LED显示模块、语音播放模块的实现流程,给出了大部分源代码。
本文设计的公交车自动报站及汉字显示系统具有使用方便、体积小、经济实惠、工作稳定、误报率低等特点。
关键词:单片机;GPS;LED汉字显示屏;ISD1730AbstractAdvanced Public Transportation Systems (APTS) is an important part of Intelligent Transport System (ITS), and many researches and attempts related to the intelligent publictransport vehicles have come forth during recent years. At present, many city buses in China are still the traditional manual buttons on station except Beijing, Shanghai, Shenzhen, Guangzhou,and Qingdao. Therefore, an intelligent bus-stop-announcing system is strongly required in thesecities.This paper introduces the design principle of a new bus automatic stop reporting system, which centers AT89S51 Single Chip Micyoco, concerning ISD1730 speech chip, dot matrix LED character display screen and line driver chip. When a bus reaches a certain stop, it makes this system to work through the GPS module. That is, through the speech output circuit to carry out the work of voice announcement and presentation, and at the same time AT89S51 Single Chip Micyoco carries out the character display through the read of characters and delivery to the LED dot matrix display circuit. In this way, a synchronic cooperation of display and speech during the operation of the vehicle is reached and the service quality of buses is improved.A design method of the Bus Station Report System based on AT89C51SND1C is put forward. This part mainly discusses hardware design, including power circuit, the systemclock circuit, reset circuit, USB interface circuit and Nand Flash memory circuit, etc. Practical application circuit and PCB layout of the components are given.The automatic stop reporting and character display system designed in this paper is convenient, small in size, economy, stable, and low in mistake rate.Key words: MCU; GPS; LED chinese characters display; ISD1730目录第1章绪论 (1)课题研究的背景和意义 (1)公交车报站系统的发展现状 (2)论文的任务和工作内容 (3)第2章系统的总体方案设计 (4) (4) (6)第3章硬件电路设计 (7)单片机最小系统设计 (7)AT89C51简介 (7)引脚说明 (8)晶体振荡电路 (10)复位电路 (11)语音电路设计 (12)语音电路芯片的介绍 (12)语音电路设计 (16)LED显示电路设计 (17)LED显示方式 (19)LED驱动原理 (19)显示电路 (20)GPS定位模块设计 (21)电源电路设计 (22)第4章系统软件设计 (23)主程序的设计 (24)子程序的设计 (25)LED汉字显示程序 (25)语音播放程序 (28)录音程序 (29)第5章结论 (35)参考文献 (36)致谢 (38)附录Ⅰ (39)附录Ⅱ (49)附录Ⅲ (52)第1章绪论1.1课题研究的背景和意义公共汽车是目前世界各国使用最广泛的公共交通工具。
单片机恒温箱温度控制系统的设计说明
课程设计课题:单片机培养箱温控系统设计本课程设计要求:温度控制系统基于单片机,实现对温度的实时监控,实现控制的智能化。
设计了培养箱温度控制系统,配备温度传感器,采用DS18B20数字温度传感器,无需数模/数转换,可直接与单片机进行数字传输,采用PID控制技术,可保持温度在要求的恒定范围内,配备键盘输入设定温度;配备数码管L ED显示温度。
技术参数及设计任务:1、使用单片机AT89C2051控制温度,使培养箱保持最高温度110 ℃ 。
2、培养箱温度可预设,干燥过程恒温控制,控温误差小于± 2℃.3、预设时显示设定温度,恒温时显示实时温度。
采用PID控制算法,显示精确到0.1℃ 。
4、当温度超过预设温度±5℃时,会发出声音报警。
和冷却过程没有线性要求。
6、温度检测部分采用DS18B20数字温度传感器,无需数模/数转换,可直接与单片机进行数传7 、人机对话部分由键盘、显示器、报警三部分组成,实现温度显示和报警。
本课程设计系统概述一、系统原理选用AT89C2051单片机作为中央处理器,通过温度传感器DS18B20采集培养箱的温度,并将采集的信号传送给单片机。
驱动培养箱的加热或冷却。
2、系统整体结构总体设计应综合考虑系统的总体目标,进行初步的硬件选型,然后确定系统的草案,同时考虑软硬件实现的可行性。
经过反复推敲,总体方案确定以爱特梅尔公司推出的51系列单片机为温度智能控制系统核心,选用低功耗、低成本的存储器、数显等元器件。
总体规划如下:图1 系统总体框图2、硬件单元设计一、单片机最小系统电路Atmel公司的AT2051作为89C单片机,完全可以满足本系统所需的采集、控制和数据处理的需要。
单片机的选择在整个系统设计中非常重要。
该单片机具有与MCS-51系列单片机兼容性高、功耗低、可在接近零频率下工作等诸多优点。
广泛应用于各种计算机系统、工业控制、消费类产品中。
AT 89C2051 是 AT89 系列微控制器中的精简产品。
MAX813L芯片中文资料(看门狗及复位专用芯片)

MAX813L芯片中文资料(看门狗及复位专用芯片)1 MAX813L芯片及其工作原理1.1 MAX813L芯片特点· 加电、掉电以及供电电压下降情况下的复位输出,复位脉冲宽度典型值为200 ms。
· 独立的看门狗输出,如果看门狗输入在1.6 s未被触发,其输出将变为高电平。
· 1.25 V门限值检测器,用于电源故障报警、电池低电压检测或+5 V 以外的电源*。
· 门限电压为4.65V· 低电平有效的手动复位输入。
· 8引脚DIP封装。
1.2 MAX813L的引脚及功能1.2.1 MAX813L芯片引脚排列见图1—11.2.2 引脚功能及工作原理说明(1)手动复位输入端()当该端输入低电平保持140 ms以上,MAX813L就输出复位信号.该输入端的最小输入脉宽要求可以有效地消除开关的抖动。
与TTL/CMOS兼容。
(2)工作电源端(VCC):接+5V电源。
(3)电源接地端(GND):接0 V参考电平。
(4)电源故障输入端(PFI)当该端输入电压低于1.25 V时,5号引脚输出端的信号由高电平变为低电平。
(5)电源故障输出端()电源正常时,保持高电平,电源电压变低或掉电时,输出由高电平变为低电平。
(6)看门狗信号输入端(WDI)程序正常运行时,必须在小于1.6 s的时间间隔向该输入端发送一个脉冲信号,以清除芯片部的看门狗定时器。
若超过1.6 s该输入端收不到脉冲信号,则部定时器溢出,8号引脚由高电平变为低电平。
(7)复位信号输出端(RST)上电时,自动产生200 ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
(8)看门狗信号输出端()正常工作时输出保持高电平,看门狗输出时,该端输出信号由高电平变为低电平。
2 MAX813L典型电路设计2.1 基本工作原理工业环境中的干扰大多是以窄脉冲的形式出现,而最终造成微机系统故障的多数现象为“死机”。
MAX813L功能特点与应用

MAX813L功能特点与应用1 引言单片机系统广泛应用于各种工作现场,工作现场中的某些干扰源,使系统无法正常运行,甚至产生误操作,造成严重的事故。
干扰源通常可分为以下两种:一、由电源引起的干扰:单片机系统通常由市电经电源变换后供电,市电网络的瞬时断电、停电等都会经电源串入瞬变干扰,引起单片机系统误动作。
实践经验表明,在单片机系统因外部干扰而引起的故障中,80%以上是因电源干扰产生的。
因此,对电源电压进行监测并采取相应的措施保证系统的正常运行是非常必要的。
二、由电源以外因素引起的干扰:主要是传输信道的干扰,此类干扰会引起系统程序跑飞或死机故障。
对干扰源除了从硬件方面加强抗干扰措施以外,使跑飞的程序重新进入正常运行也是很重要的。
同时单片机系统设计上还有正常工作上电、手动复位等要求。
MAX813L就是专门用来实现电源电压检测的芯片,它不仅能对+5V电源电压检测,还可以对其他电源电压(如12V,24V)实现检测,另外芯片内部还具有看门狗定时电路,用于检测单片机内部程序跑飞或死机故障,应用十分方便。
2 MAX813L芯片功能及引脚定义1.1 功能和特点MAX813L是MAXIM公司推出的微处理器监控芯片,其主要功能包括:1、系统上电、掉电或电源电压降低条件下(芯片供电电压低于4.65V),芯片输出复位信号;2、看门狗输入端在1.6s内未检测到触发信号,看门狗输出端跳变为低电平;3、内置1.25V阈值电压检测电路用于系统掉电或电压降低报警;4、手动复位功能。
1.2 引脚定义电路如图2所示,主电源V1经过电阻R1和R2分压接到PFI引脚上,选择R1和R2适当的分压比,当主电源V1在正常电压范围内,使PFI端分压>1.25V,PFO端输出高电平,固态继电器输出端未接通备用电源V2。
当主电源V1因某种原因下降至阈值电压以下,使PFI端分压<1.25V,則PFO端从高电平跳变为低电平,经过驱动器A触发固态继电器控制回路导通,从而接通后备电源V2。
照明控制系统设计

关键词:主控制器,单片机,有线通信,无线数传1 绪论近十几年来,随着我国城市建设的快速发展,楼宇照明也相应飞速发展。
在楼宇的照明数量与质量两个方面均有显著的变化与提高,特别是随着人民生活水平进入小康水平,楼宇照明水平提高很快,追求人工照明光环境的舒适性、个性化、安全、节能等方面日见突出。
楼宇中人工光环境对于满足人们的生活、学习、娱乐以及工作方面有着重要的意义。
照明控制系统传统是以照明配电箱通过手动开关来控制照明灯具的通断,或通过回路中串入接触器,实现远距离控制。
而今出现的楼宇自控系统,是以电气触点来实现区域控制、定时通断、中央监控等功能。
由于照明控制系统在楼宇自控系统中并非独立,同时控制功能简单,因此使用上有一定的局限性。
故当楼宇自控系统出现故障时,照明系统亦受到影响。
随着微电子技术与数字化技术的发展,开发出了智能化水平更高的专业照明控制的独立系统,从而能节约能源、延长灯具寿命、提高照明质量。
根据使用客户的经验,不仅使照明管理与设备维修简单及降低费用外,还对环境改善、提高工作效率都有着显著的效果。
本系统是以单片机为控制器的核心,其中上位机是以AT89C51为基础,下位机是以AT89C2051为基础,再连接外围电路,通过现场总线RS485通信方式实现照明灯具的智能控制,也可以通过无线数传模块实现无线通信,从而达到照明灯具的智能控制。
1.1单片机的应用技术电子技术和微型计算机的迅速发展,促进微型计算机测量和控制技术的迅速发展和广泛应用,单片机(单片微型计算机)的应用已经渗透到国民经济的各个部门和领域,它起到了越来越重要的作用。
单片微型计算机就是将中央处理单元、存储器、定时/计数器和多种接口都集成到一块集成电路芯片上的微型计算机。
因此一块芯片就构成了一台计算机。
它已成为工业控制领域、智能仪器仪表、尖端武器、日常生活中最广泛使用的计算机。
单片机由硬件系统与软件系统组成。
硬件系统是指构成微机系统的实体与装置,通常由运算器、控制器、存储器、输入接口电路和输入设备、输出接口电路和输出设备等组成。
MAX705 706 813中文参考资料(详细)

MAX705/706/813中文资料。
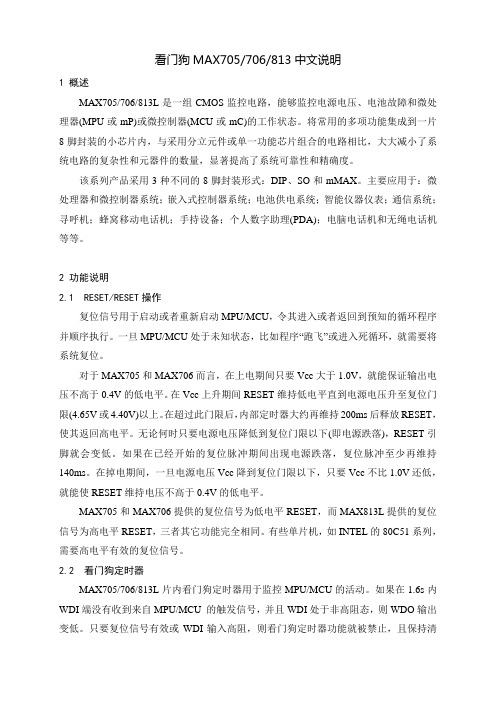
基本参数:工作电压范围:1.0~5.5V电源电流:150~350uA复位闵值:4.25~4.5V复位脉冲宽度:140~280(ms)输出电压:0.4V看门狗超时周期:1.6sec上拉电流:100.~600uAMR脉冲宽度:150(ns)MR输入闵值:0.8~2.0VPFO输出电压:-1.5~0.4V存储温度范围:-65°C ~160°C工作温度范围:-40°C ~ 85°C焊接温度范围:+300°C安装类型:表面贴装引脚图概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU 或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
功能说明RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
MAX813L

-22-《国外电子元器件》1997年第6期1997年6月微处理器监控器MA X813L刘国勇摘要:MAX813L 是美国MAXIM 公司生产的微处理器专用监控器,具有看门狗、电压检测和上电复位等功能,可提高系统的可靠性和准确性。
本文介绍该芯片的内部结构、典型应用和作为单片机看门狗电路的实用电路。
关键词:监控电路看门狗电路MAX813L 复位电压检测图1MA X813L 内部框图●新特器件应用1、概述目前,监控电路在工业监控系统和微处理器中已得到广泛的应用,它可以有效的防止程序的“跑飞”,并自动将系统恢复正常工作状态。
当外来干扰导致数据总线、I/O 总线或控制总线上的数字信号错乱时,将引发一系列的后果,特别是程序指针计数器PC 值受干扰而改变时,将引起程序“跑飞”,使系统出现死机或其他一些不可预知的情况。
2、内部结构MAX813L 是美国MAXIM 公司生产的低价格单片机监控电路。
它减少了在微处理器系统中采用分离元件来实现监控功能所用的元器件数量和复杂性,并能提高系统的可靠性和准确性。
它除有看门狗作用以外,还有电源电压检测和上电(手动)复位的功能。
图1是MAX813L 的内部框图。
PEI 用于监测电源电压,如果PF I 端输入的与电源电压成正比的电压低于1.25V ,则PFO 端输出为低电平,这个负脉冲可以作为微处理器的中断脉冲。
看门狗电路监测着微处理器的状态。
如果微处理器在1.6秒之内没有触发看门狗输入端WD I 并且WD I 端不是处于三态状态,那么WDO 将变为低电平。
一旦R ESE T 信号产生或者WD I 输入为三态,看门狗定时器就会被清零且不计数。
除非R ESE T 信号消失而且WD I 端置为高电平或者低电平(即不是处于高阻状态),看门狗定时器又将开始计数。
3、MAX813L 实用实例典型的接法如图3。
将WDO接到微处理器的非屏蔽中断输入端NM I ,当电源电压V CC 低于复位的门限电平时,无论看门狗计数器计数值是否到,WDO 端都将被拉至低电平,产生非屏蔽中断,同时R ESE T信号也同时产-23-图3MA X813L 的典型应用生,因此,非屏蔽中断将会被R ESE T 信号所覆盖。
看门狗芯片中文说明
看门狗MAX705/706/813中文说明1 概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
2 功能说明2.1 RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
如果在已经开始的复位脉冲期间出现电源跌落,复位脉冲至少再维持140ms。
在掉电期间,一旦电源电压Vcc降到复位门限以下,只要Vcc不比1.0V还低,就能使RESET维持电压不高于0.4V的低电平。
MAX705和MAX706提供的复位信号为低电平RESET,而MAX813L提供的复位信号为高电平RESET,三者其它功能完全相同。
有些单片机,如INTEL的80C51系列,需要高电平有效的复位信号。
2.2 看门狗定时器MAX705/706/813L片内看门狗定时器用于监控MPU/MCU的活动。
基于单片机出租车计价器课题设计(c语言编写)

目录一、设计任务和性能指标 (2)1.1设计任务 (2)1.2性能指标 (2)二、设计方案 (3)2.1任务分析 (3)2.2系统设计 (4)三系统硬件设计 (6)3.1电源电路 (6)3.2单片机的最小系统 (7)3.3 DS1302时钟电路 (8)3.4显示电路的设计 (9)3.5按键控制的设计 (10)3.7复位电路 (12)四、系统软件设计 (13)4.1主程序设计 (13)4.2 子程序设计 (14)4.2.1 DS1302子程序 (14)4.2.1 DS1302子程序流程图 (14)4.2.2 显示子程序 (16)4.2.2 显示子程序流程图 (18)4.3 修改时间子程序 (19)五、调试及性能分析 (20)5.1调试步骤 (20)5.1.1硬件调试 (20)5.1.2软件调试: (20)5.2性能分析 (20)六、心得体会 (22)七、参考文献 (23)八、附录 (24)附录1、程序清单 (24)附录2 系统硬件电路图 (34)一、设计任务和性能指标1.1设计任务出租车计价器是乘客与司机双方的交易准则,它是出租车行业发展的重要标志,是出租车中最重要的工具。
它关系着交易双方的利益。
具有良好性能的计价器无论是对广大出租车司机朋友还是乘客来说都是很必要的。
出租车计价器的主要功能是计价显示、时钟显示、根据白天、黑夜、途中等待来调节营运参数、计量数据查询等。
要求用Protel 画出系统的电路原理图(要求以最少组件,实现系统设计所要求的功能),印刷电路板(要求布局合理,线路清晰),绘出程序流程图,并给出程序清单(要求思路清晰,尽量简洁,主程序和子程序分开,使程序有较强的可读性)。
1.2性能指标1.不同情况具有不同收费标准:白天、晚上、途中等待(>10min开始收费);2.数据输出:单价输出、路程输出、总金额输出;3.按键:启动计时开关、数据显示切换、白天/晚上切换、复位;4.能手动进行修改单价,但单价设定需密码进入。
单片机复位电路设计与探讨

单片机复位电路设计与探讨作者:刘力来源:《数字技术与应用》2011年第08期摘要:归纳了目前使用比较广泛的四种单片机复位电路,最后提出了设计复位电路应注意的问题及提高杭干扰性的措施。
关键词:复位单片机可靠性中图分类号:TP368 文献标识码:A 文章编号:1007-9416(2011)08-0154-011、引言由于单片机性能强、价格便宜,因此,单片机在运算、逻辑控制、智能化等方面得到了广泛的应用[1]。
市场上流行的单片机种类很多,但使用单片机必须设计其复位电路。
而设计一个好的复位电路,整个系统工作就会更可靠,避免现场运行时的“死机”和“程序走飞”的现象。
目前,主要有四种类型的单片机复位电路:(1)微分型复位电路;(2)积分型复位电路;(3)比较器型复位电路;(4)看门狗型复位电路[2]。
另外,还有专用的复位芯片,比如Maxim公司的MAX813L等。
2、数学模型化复位电路的可靠性分析和改进措施2.1 微分型复位电路在微分复位电路中,以高电平复位为例(以下同),当接通电源时,假设Us为阶跃信号,在CPU复位端由于下拉电阻R作用,引起的电压值为0.3V以下。
但实际情况,Us不可能是理想的阶跃信号,即对Us的上升斜率产生影响,容易引入干扰,从而影响了的RST端电压的复位特性,导致CPU工作不正常。
为改善其性能,应使用稳压电源,并在电容输入端加入适当的电感,减少负载突变而引起的干扰。
2.2 积分型复位电路在积分复位电路中,当接通电源时,如果反相器工作时间不小于复位脉冲宽度,这样就可以保证上电复位的可靠性。
但在实际应用时,复位电路很有可能在两次开关电源的时间间隔较小时,出现异常。
设计时,可以在原回路电阻上并联一个二极管和电阻串联的支路,并让支路电阻远小于原电阻,解决此类问题。
2.3 比较器型复位电路比较器型复位电路中,有一个RC低通网络,当复位时,比较器的负相端网络的时间常数远远小于正相端网络时间常数,而比较器的正相输入端电压比负相端的延迟时间长。
max813l的工作原理及应用

max813l的工作原理及应用1. 简介max813l是一款具有高性能和低功耗的集成电路。
它可以在各种电子设备中应用,具有广泛的用途。
本文将介绍max813l的工作原理,以及它在不同领域的应用。
2. 工作原理max813l的工作原理基于以下几个主要组成部分:2.1 电源管理芯片max813l集成了一个电源管理芯片,能够稳定地提供电力以供其他电子组件使用。
它具有过压保护、欠压保护、过流保护等功能,能有效保护设备和电路不受损坏。
2.2 电池管理系统max813l还集成了电池管理系统,能够对连接的电池进行监控和管理。
它可以检测电池的电量、温度、电压等信息,并根据这些信息进行合理的电池管理,延长电池寿命。
2.3 信号处理器max813l集成了一系列信号处理器,能够处理各种输入和输出信号。
它可以对传感器数据进行处理、滤波和放大,并将处理后的信号发送到其他部件进行进一步处理或显示。
3. 应用领域max813l在以下领域有着广泛的应用:3.1 移动设备max813l可以应用于各种移动设备,如智能手机、平板电脑等。
它可以优化设备的电池管理,延长电池寿命,并提供稳定可靠的电源供应,保证设备的正常运行。
3.2 汽车电子系统max813l在汽车电子系统中有着重要的作用。
它可以监控并管理汽车的电池状况,提供稳定的电源给各个电子组件,并对电池进行保护,避免过充或过放导致的损坏。
3.3 工业自动化max813l可以应用于工业自动化领域,用于管理和监控各种工业设备。
它能够提供稳定的电源供应,并对设备进行智能监控和故障检测,提高生产效率和设备可靠性。
3.4 家电max813l还可以用于家电领域,如电视机、洗衣机等。
它可以提供稳定的电源供应,并对家电设备的电池管理和信号处理进行优化,提升设备性能和用户体验。
4. 总结max813l是一款功能强大的集成电路,具有高性能和低功耗的特点。
它在各个领域都有广泛的应用,能够提供稳定、可靠的电源管理和信号处理功能。
看门狗电路
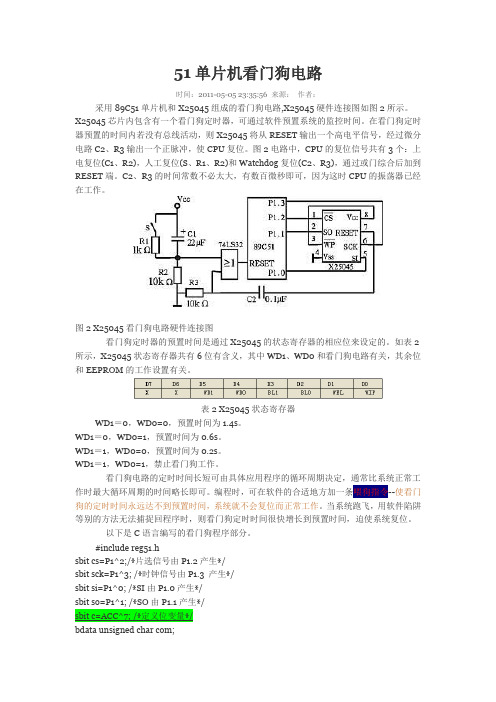
51单片机看门狗电路时间:2011-05-05 23:35:56 来源:作者:采用89C51单片机和X25045组成的看门狗电路,X25045硬件连接图如图2所示。
X25045芯片内包含有一个看门狗定时器,可通过软件预置系统的监控时间。
在看门狗定时器预置的时间内若没有总线活动,则X25045将从RESET输出一个高电平信号,经过微分电路C2、R3输出一个正脉冲,使CPU复位。
图2电路中,CPU的复位信号共有3个:上电复位(C1、R2),人工复位(S、R1、R2)和Watchdog复位(C2、R3),通过或门综合后加到RESET端。
C2、R3的时间常数不必太大,有数百微秒即可,因为这时CPU的振荡器已经在工作。
图2 X25045看门狗电路硬件连接图看门狗定时器的预置时间是通过X25045的状态寄存器的相应位来设定的。
如表2所示,X25045状态寄存器共有6位有含义,其中WD1、WD0和看门狗电路有关,其余位和EEPROM的工作设置有关。
表2 X25045状态寄存器WD1=0,WD0=0,预置时间为1.4s。
WD1=0,WD0=1,预置时间为0.6s。
WD1=1,WD0=0,预置时间为0.2s。
WD1=1,WD0=1,禁止看门狗工作。
看门狗电路的定时时间长短可由具体应用程序的循环周期决定,通常比系统正常工作时最大循环周期的时间略长即可。
编程时,可在软件的合适地方加一条喂狗指令--使看门狗的定时时间永远达不到预置时间,系统就不会复位而正常工作。
当系统跑飞,用软件陷阱等别的方法无法捕捉回程序时,则看门狗定时时间很快增长到预置时间,迫使系统复位。
以下是C语言编写的看门狗程序部分。
#include reg51.hsbit cs=P1^2;/*片选信号由P1.2产生*/sbit sck=P1^3; /*时钟信号由P1.3 产生*/sbit si=P1^0; /*SI由P1.0产生*/sbit so=P1^1; /*SO由P1.1产生*/sbit c=ACC^7; /*定义位变量*/bdata unsigned char com;void tran() /*发送一字节数据子函数*/{unsigned char i;for(i=0; i<8; i++){ ACC=com; /*将数据放入a中*/si=c;sck=0; /*sck产生一个上跳变*/sck=1;com=com<<1; /*左移一位*/}return;}main(){com=0x06; /*发写读使能命令*/cs=0;tran();cs=1;com=0x01; /*发写状态字命令*/cs=0;tran();com=0x00; /*定时1.4s*/tran();cs=1;...;系统正常运行的程序部分}需要注意的是,在程序正常运行的时候,应该在适当的地方加一条喂狗指令,使系统正常运行时的定时时间达不到预置时间。
单片机的复位电路
单片机复位电路设计一、概述影响单片机系统运行稳定性的因素可大体分为外因和内因两部分:1、外因射频干扰,它是以空间电磁场的形式传递在机器内部的导体(引线或零件引脚)感生出相应的干扰,可通过电磁屏蔽和合理的布线/器件布局衰减该类干扰;电源线或电源内部产生的干扰,它是通过电源线或电源内的部件耦合或直接传导,可通过电源滤波、隔离等措施来衰减该类干扰。
2、内因振荡源的稳定性,主要由起振时间频率稳定度和占空比稳定度决定。
起振时间可由电路参数整定稳定度受振荡器类型温度和电压等参数影响复位电路的可靠性。
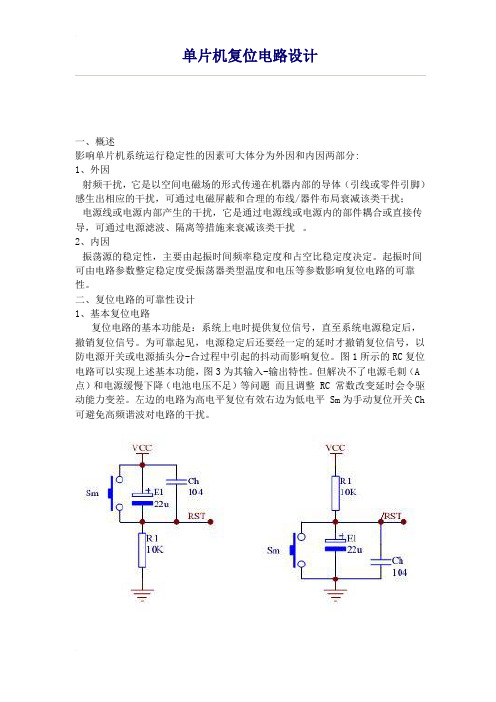
二、复位电路的可靠性设计1、基本复位电路复位电路的基本功能是:系统上电时提供复位信号,直至系统电源稳定后,撤销复位信号。
为可靠起见,电源稳定后还要经一定的延时才撤销复位信号,以防电源开关或电源插头分-合过程中引起的抖动而影响复位。
图1所示的RC复位电路可以实现上述基本功能,图3为其输入-输出特性。
但解决不了电源毛刺(A 点)和电源缓慢下降(电池电压不足)等问题而且调整 RC 常数改变延时会令驱动能力变差。
左边的电路为高电平复位有效右边为低电平 Sm为手动复位开关Ch 可避免高频谐波对电路的干扰。
图1 RC复位电路图2所示的复位电路增加了二极管,在电源电压瞬间下降时使电容迅速放电,一定宽度的电源毛刺也可令系统可靠复位。
图3所示复位电路输入输出特性图的下半部分是其特性,可与上半部比较增加放电回路的效果图2 增加放电回路的RC复位电路使用比较电路,不但可以解决电源毛刺造成系统不稳定,而且电源缓慢下降也能可靠复位。
图4 是一个实例当 VCC x (R1/(R1+R2) ) = 0.7V时,Q1截止使系统复位。
Q1的放大作用也能改善电路的负载特性,但跳变门槛电压 Vt 受 VCC 影响是该电路的突出缺点,使用稳压二极管可使 Vt 基本不受VCC影响。
见图5,当VCC低于Vt(Vz+0.7V)时电路令系统复位。
图3 RC复位电路输入-输出特性图4 带电压监控功能的复位电路图5 稳定门槛电压图6 实用的复位监控电路在此基础上,增加延时电容和放电二极管构成性能优良的复位电路,如图6所示。
MAX813L芯片中文资料(看门狗及复位专用芯片)

MAX813L芯片中文资料(看门狗及复位专用芯片)1 MAX813L芯片及其工作原理1.1 MAX813L芯片特点· 加电、掉电以及供电电压下降情况下的复位输出,复位脉冲宽度典型值为200 ms。
· 独立的看门狗输出,如果看门狗输入在1.6 s内未被触发,其输出将变为高电平。
· 1.25 V门限值检测器,用于电源故障报警、电池低电压检测或+5 V 以外的电源*。
· 门限电压为4.65V· 低电平有效的手动复位输入。
· 8引脚DIP封装。
1.2 MAX813L的引脚及功能1.2.1 MAX813L芯片引脚排列见图1—11.2.2 引脚功能及工作原理说明(1)手动复位输入端()当该端输入低电平保持140 ms以上,MAX813L就输出复位信号.该输入端的最小输入脉宽要求可以有效地消除开关的抖动。
与TTL/CMOS兼容。
(2)工作电源端(VCC):接+5V电源。
(3)电源接地端(GND):接0 V参考电平。
(4)电源故障输入端(PFI)当该端输入电压低于1.25 V时,5号引脚输出端的信号由高电平变为低电平。
(5)电源故障输出端()电源正常时,保持高电平,电源电压变低或掉电时,输出由高电平变为低电平。
(6)看门狗信号输入端(WDI)程序正常运行时,必须在小于1.6 s的时间间隔内向该输入端发送一个脉冲信号,以清除芯片内部的看门狗定时器。
若超过1.6 s该输入端收不到脉冲信号,则内部定时器溢出,8号引脚由高电平变为低电平。
(7)复位信号输出端(RST)上电时,自动产生200 ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
(8)看门狗信号输出端()正常工作时输出保持高电平,看门狗输出时,该端输出信号由高电平变为低电平。
2 MAX813L典型电路设计2.1 基本工作原理工业环境中的干扰大多是以窄脉冲的形式出现,而最终造成微机系统故障的多数现象为“死机”。
复位及复位电路

1、阻容复位:低电平复位:由于阻容串连电路中电容C两端电压不能突变,因此在上电时,RST端会维持一段时间的低电平起到低电平复位信号的作用,随着Vcc电源通过电阻R向电容C充电,C两端的电压差逐渐增大,经过一段时间后变为高电平,上电复位信号结束。
高电平复位:电阻电容护换位置,原理类似。
复位时间T=0.7*RC习题:复位时间1ms的高电平复位电路:2、芯片复位MAX706MAX706引脚定义:~MR:人工复位输入,电压拉至0.8V以下触发复位VCC:电源输入GND:接地PFI:电源故障电压监控输入端~PFO:电源故障输出端WDI:看门狗输入端~RST:低电平有效的复位输出端~WDO:看门狗输出端MAX706提供以下四种功能:(1)上电、掉电复位以及降压情况下复位(2)独立的看门狗输出。
如果在1.6s内看门狗输入端未被触发,看门狗输出将变为低电平。
(3) 1.25V门限检测器,用于电源故障报警、低电压监测或电源监控。
(4)低电平有效的人工复位输出。
低电平有效的手动复位输入端(MR)可被片内250mA的上拉电流源拉到高电平,并可以被外接CMOS/TTL逻辑电路或一端接地的按钮开关拉成低电平。
不需要采用外部去抖动电路,理由是最小为140ms的复位时间足以消除机械开关的抖动。
简单地将MR端连接到WDO端,就可以使看门狗定时器超时产生复位脉冲。
当需要高电平有效的复位信号时,应该选用MAX813L。
MAX705/MAX706/MAX813L片内带有一个辅助比较器,它具有独立的同相输入端(PFI)和输出端(PFO),其反相输入端内部连接一个1.25V的参考电压源。
为了建立一个电源故障预警电路,可以在PFI脚上连接一个电阻分压支路,该支路连接的监视点通常在稳压电源集成电路之前。
通过调节电阻值,合理地选择分压比,以便于使稳压器+5V 输出端电压下降之前,PFI端的电压刚好下降到低于1.25V。
以此为MPU/MCU提供中断信号,以便使其能够对即将到来的电源掉电作好充分地准备。
MAX705

功能监控器MAX705/706/813中文资料。
功能监控器MAX705/706/813中文资料。
概述MAX705/706/813L是一组CMOS监控电路,能够监控电源电压、电池故障和微处理器(MPU或mP)或微控制器(MCU或mC)的工作状态。
将常用的多项功能集成到一片8脚封装的小芯片内,与采用分立元件或单一功能芯片组合的电路相比,大大减小了系统电路的复杂性和元器件的数量,显著提高了系统可靠性和精确度。
该系列产品采用3种不同的8脚封装形式:DIP、SO和mMAX。
主要应用于:微处理器和微控制器系统;嵌入式控制器系统;电池供电系统;智能仪器仪表;通信系统;寻呼机;蜂窝移动电话机;手持设备;个人数字助理(PDA);电脑电话机和无绳电话机等等。
功能说明RESET/RESET操作复位信号用于启动或者重新启动MPU/MCU,令其进入或者返回到预知的循环程序并顺序执行。
一旦MPU/MCU处于未知状态,比如程序“跑飞”或进入死循环,就需要将系统复位。
对于MAX705和MAX706而言,在上电期间只要Vcc大于1.0V,就能保证输出电压不高于0.4V 的低电平。
在Vcc上升期间RESET维持低电平直到电源电压升至复位门限(4.65V或4.40V)以上。
在超过此门限后,内部定时器大约再维持200ms后释放RESET,使其返回高电平。
无论何时只要电源电压降低到复位门限以下(即电源跌落),RESET引脚就会变低。
如果在已经开始的复位脉冲期间出现电源跌落,复位脉冲至少再维持140ms。
在掉电期间,一旦电源电压Vcc降到复位门限以下,只要Vcc不比1.0V还低,就能使RESET维持电压不高于0.4V的低电平。
MAX705和MAX706提供的复位信号为低电平RESET,而MAX813L提供的复位信号为高电平RESET,三者其它功能完全相同。
有些单片机,如INTEL的80C51系列,需要高电平有效的复位信号。
看门狗定时器MAX705/706/813L片内看门狗定时器用于监控MPU/MCU的活动。
MEMORY存储芯片MAX813LESA+中文规格书

Manual Reset Input Many μP-based products require manual reset capabil -ity, allowing the operator, a test technician, or external logic circuitry to initiate a reset. A logic low on MR asserts reset. Reset remains asserted while MR is low, and for the Reset Active Timeout Period (t RP ) after MR returns high. This input has an internal 20kΩ pull-up resistor, so it can be left open if it is not used. MR can be driven with TTL or CMOS-logic levels, or with open-drain/collector outputs. Connect a normally open momentary switch from MR to GND to create a manual-reset function; external debounce circuitry is not required. If MR is driven from long cables or if the device is used in a noisy environment, connecting a 0.1μF capacitor from MR to ground provides additional noise immunity.Reset Threshold Accuracy The MAX811/MAX812 are ideal for systems using a 5V ±5% or 3V ±5% power supply with ICs specified for 5V ±10% or 3V ±10%, respectively. They are designed to meet worst-case specifications over temperature. The reset is guaranteed to assert after the power supplyfalls out of regulation, but before power drops below theminimum specified operating voltage range for the systemICs. The thresholds are pre-trimmed and exhibit tight dis -tribution, reducing the range over which an undesirable reset may occur.PINNAME FUNCTION MAX811MAX81211GND Ground 2—RESET Active-Low Reset Output. RESET remains low while V CC is below the reset threshold or while MR is held low. RESET remains low for the Reset Active Timeout Period (t RP ) after the reset conditions are terminated.—2RESET Active-High Reset Output. RESET remains high while V CC is below the reset threshold or while MR is held low. RESET remains high for Reset Active Timeout Period (t RP ) after the reset conditions are terminated.33MR Manual Reset Input. A logic low on MR asserts reset. Reset remains asserted as long as MR is low and for 180ms after MR returns high. This active-low input has an internal 20kΩ pull-up resistor. It can be driven from a TTL or CMOS-logic line, or shorted to ground with a switch. Leave open if unused.44V CC +5V, +3.3V, or +3V Supply Voltage Detailed DescriptionReset OutputA microprocessor’s (μP’s) reset input starts the μP in aknown state. These μP supervisory circuits assert resetto prevent code execution errors during power-up, power-down, or brownout conditions.RESET is guaranteed to be a logic low for V CC > 1V.Once V CC exceeds the reset threshold, an internal timerkeeps RESET low for the reset timeout period; after thisinterval, RESET goes high.If a brownout condition occurs (V CC dips below the resetthreshold), RESET goes low. Any time V CC goes belowthe reset threshold, the internal timer resets to zero, andRESET goes low. The internal timer starts after V CC returns above the reset threshold, and RESET remainslow for the reset timeout period.The manual reset input (MR ) can also initiate a reset. See the Manual Reset Input section.The MAX812 has an active-high RESET output that is theinverse of the MAX811’s RESET output.MAX811/MAX8124-Pin μP Voltage Monitorswith Manual Reset InputPin DescriptionPACKAGE TYPEPACKAGE CODE OUTLINE ND PATTERN NO.4 SOT143U4+121-005290-0183MAX811/MAX8124-Pin μP Voltage Monitorswith Manual Reset InputPackage InformationFor the latest package outline information and land patterns (footprints), go to . Note that a “+”, “#”, or “-” in the package code indicates RoHS status only. Package drawings may show a different suffixcharacter, but the drawing pertains to the package regardless of RoHS status.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MAX813L芯片中文资料(看门狗及复位专用芯片)
1MAX813L芯片及其工作原理
1.1MAX813L芯片特点
·加电、掉电以及供电电压下降情况下的复位输出,复位脉冲宽度典型值为200 ms。
·独立的看门狗输出,如果看门狗输入在1.6 s内未被触发,其输出将变为高电平。
· 1.25 V门限值检测器,用于电源故障报警、电池低电压检测或+5 V 以外的电源*。
·门限电压为4.65V
·低电平有效的手动复位输入。
· 8引脚DIP封装。
1.2MAX813L的引脚及功能
1.2.1MAX813L芯片引脚排列见图1—1
1.2.2引脚功能及工作原理说明
(1)手动复位输入端()
当该端输入低电平保持140 ms以上,MAX813L就输出复位信号.该输入端的最小输入脉宽要求可以有效地消除开关的抖动。
与
TTL/CMOS兼容。
(2)工作电源端(VCC):接+5V电源。
(3)电源接地端(GND):接0 V参考电平。
(4)电源故障输入端(PFI)
当该端输入电压低于1.25 V时,5号引脚输出端的信号由高电平变为低电平。
(5)电源故障输出端()
电源正常时,保持高电平,电源电压变低或掉电时,输出由高电平变为低电平。
(6)看门狗信号输入端(WDI)
程序正常运行时,必须在小于1.6 s的时间间隔内向该输入端发送一个脉冲信号,以清除芯片内部的看门狗定时器。
若超过1.6 s该输入端收不到脉冲信号,则内部定时器溢出,8号引脚由高电平变为低电平。
(7)复位信号输出端(RST)
上电时,自动产生200 ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
(8)看门狗信号输出端()
正常工作时输出保持高电平,看门狗输出时,该端输出信号由高电
平变为低电平。
2MAX813L典型电路设计
2.1基本工作原理
工业环境中的干扰大多是以窄脉冲的形式出现,而最终造成微机系统故障的多数现象为“死机”。
究其原因是CPU在执行某条指令时,受干扰的冲击,使它的操作码或地址码发生改变,致使该条指令出错。
这时,CPU执行随机拼写的指令,甚至将操作数作为操作码执行,导致程序“跑飞”或进入“死循环”。
为使这种“跑飞”或进入“死循环”的程序自动恢复,重新正常工作,一种有效的办法是采用硬件“看门狗”技术。
用看门狗*程序的运行。
若程序发生“死机”,则看门狗产生复位信号,引导单片机程序重新进入正常运行。
此外,工业现场由于诸多大型用电设备的投入或撤出电网运行,往往造成系统的电源电压不稳,当电源电压降低或掉电时,会造成重要的数据丢失,系统不能正常运行。
若设法在电源电压降至一定的限值之前,单片机快速地保存重要数据,将会最大限度地减少损失。
单片机的掉电工作方式电路原理图如图2—1所示:当PD设置为1
时,激活掉电方式,此时=0,与非门输出为低电平,时钟发生器停止工作,单片机内所有运行状态均被停止,只有片内RAM和SFR中的数据被保存起来。
在单片机系统中可借助于一定的外部附加电路监测电源电压,并在电源发生故障时及时通知单片机(如通过引发中断来实现)快速保存重要数据,且断开外围设备用电电源,使整个应用系统的功耗降到最少。
当电源恢复正常时,取消掉电工作方式,通过复位单片机,使系统重新正常工作。
2.2硬件实现电路图
图2—2给出了MAX813L在单片机系统中的典型应用线路图。
此电路可以实现上电、瞬时掉电以及程序运行出现“死机”时的自动复位和随时的手动复位;并且可以实时地*电源故障,以便及时地保存数据。
本电路巧妙地利用了MAX813L的手动复位输入端。
只要程序一旦跑飞引起程序“死机”,端电平由高到低,当变低超过140 ms,将引起MAX813L产生一个200 ms的复位脉冲。
同时使看门狗定时器清0和使引脚变成高电平。
也可以随时使用手动复位按钮使MAX813L产生复位脉冲,由于为产生复位脉冲端要求低电平至少保持140ms以上,故可以有效地消除开关抖动。
该电路可以实时地*电源故障(掉电、电压降低等)。
图2—2中R1的一端接未经稳压的直流电源。
电源正常时,确保R2上的电压高于1.26 V,即保证MAX813L的PFI输入端电平高于1.26 V。
当电源发生故障,PFI输入端的电平低于1.25 V时,电源故障输出端电平
由高变低,引起单片机中断,CPU响应中断,执行相应的中断服务程序,保护数据,断开外部用电电路等。