波音777飞机高升力控制系统余度管理分析
高升力控制计算机系统关键技术研究
高升力控制计算机系统关键技术研究在“高升力控制计算机系统关键技术研究”一文中,本文将就高升力控制计算机系统的关键技术进行研究和探讨。
通过以下几个方面来介绍相关的技术要点和应用。
一、高升力控制计算机系统概述高升力控制计算机系统是一种重要的技术系统,广泛应用于航空航天、工程建设、智能交通等领域。
该系统通过控制设备,实现对物体在气流中产生升力的控制,从而达到控制物体运动轨迹的目的。
高升力控制计算机系统的关键技术是实现该系统高效稳定运行的基础。
二、高升力控制计算机系统的关键技术要点1. 气动力学建模技术高升力控制计算机系统中,了解气动力学特性对于精确控制非常重要。
通过建立合理的气动力学模型,可以准确预测升力和阻力等关键参数,从而有针对性地进行控制。
2. 控制算法设计技术高升力控制计算机系统需要设计合适的控制算法,使得系统能够根据实时的气动力学参数,快速准确地调整控制设备。
常用的控制算法包括PID控制、模糊控制、自适应控制等。
3. 传感器技术高升力控制计算机系统中需要采集和测量物体在气流中的运行状态和气动力学参数。
传感器技术的发展使得系统可以更加精确地采集和测量相关数据,从而提高了系统的控制精度。
4. 通信技术在高升力控制计算机系统中,多个控制设备之间需要进行实时的数据传输和交互。
现代通信技术的应用使得控制设备之间可以快速准确地传递信息,从而实现系统的协调运行。
5. 安全保障技术高升力控制计算机系统的稳定性和安全性都是至关重要的。
在设计和应用过程中,需要采取相应的安全保障技术,如故障检测与容错技术、数据加密与防护技术等,以确保系统在各种复杂环境下能够稳定可靠地运行。
三、高升力控制计算机系统的应用高升力控制计算机系统在航空航天、工程建设、智能交通等领域都有广泛的应用。
在航空航天领域,该系统可以实现对飞行器的升力控制,提高飞行性能和安全性。
在工程建设领域,该系统可以实现对建筑物和桥梁的阻力控制,减少空气阻力对结构的影响。
波音777成功案例分析

波音777客机项目研发成功案例浅析摘要:本文主要分为三个部分,第一部分的背景知识首先简单介绍了波音公司的发展和波音777项目,第二部分的因素分析中,主要从正确的项目定义、丰富的项目管理经验和系统化的工作流程三个方面来简要分析成波音777项目的成功原因,最后一部分的案例启示总结波音公司取得瞩目成就的因素,并提出多学习优秀案例,并付诸于实践的观点。
关键词波音777 项目管理实践1.背景知识美国波音公司成立于1916年7月1日,由威廉·爱德华·波音创建,20世纪三十年代中期,波音公司开始研制大型轰炸机,六十年代以后,波音公司的主要业务由军用飞机转向商用飞机。
先后发展了波音727、波音737、波音747、波音757、波音767、波音777等一系列型号,逐步确立了全球主要的商用飞机制造商的地位。
波音777是美国波音公司研制的双发中远程宽体客机。
波音777在规格上介于波音767-300和波音747-400之间。
波音777首飞时是民用航空历史上最大的双发喷气飞机。
777飞机项目从启动、计划到执行控制、最后顺利交付客户的全过程,历经5年、遍布44个国家、涉及人员成千上万。
这个公司最大的成功与业绩在于,它的每一个新项目的完成,新机型的问世,都为波音公司本身和美国政府带来巨大的高额利润。
2.因素分析2.1正确的项目战略定义波音777项目的成功首先是项目战略定义的正确。
这里有两个要素:一是要和该项目所有干系人进行充分的沟通,了解、分析、过滤与项目任何相关的信息;二是要将项目战略和最大干系人的需求紧密结合起来。
在777项目启动之初,项目团队就与设计人员、市场销售人员、采购、法律顾问、客服人员及工程人员一起合作,了解什么样的飞机更适合消费者的需求、对消费者更加友好,如何便于制造,如何方便维修等等,然后将收集到的信息进行分析、过滤。
在对所有的信息进行前期处理之后,还要进行权重的排序,把最大干系人(消费者)的要求和项目目标紧密结合起来。
波音777飞机起落架系统采用多种新技术
,
作 时 只 需 移 动 主 轮 偏 转 致 动器
上 的手柄 就 能 很 方 便地 将其 释
,
,
后 显 示 消失
如果 起落架 在 4 D 秒后 还 未
压
。
机具 有更 好的 着 陆和 减 速 性能
五 高效 的碳 刹 车 和 降 低 刹
、
能到 达 指 令 位 置 起 落 架 指 示 将
,
在 价 7 主 起 落 架 的轮 架 上
,
B
。
A旺 R
的 空 / 地 逻辑 对飞 机上 的其
”
,
( 刹 车解 除 ) 指 示 灯
刹 车次 数
。
着 陆时 在 脱 离 跑道
。
,
他 系 统来 讲 不 是 主 要 的 空 / 地
逻 辑信 号 来源
、 。
”
”
综 上 所述 7 B 7 在 继 承波 音
系列 飞 机 特 点 的基 础 上 采 用 了
,
前 驾驶 员 通 常只 需 踩一 次刹 车
就能 将 飞 机 减 到 低 速
整速 度
”
。
,
但在 滑
七 更 简 洁 高 效 全 屏显 指 示
很 多新 技 术 使 它 的 起 落 架 系 统
比 传统 起 落架 系 统 重 量 更 轻 可
,
,
行 时却 需 要 多次 踩刹 车以 便调
2 然 而 这 时 并 不需 要 1
。
价 7 飞 机 起 落 架 系 统 的收
,
、
电 传 收放 系统
飞 机 起 落架
特 点 是 采 用 了 标 准 的前 三 点 式 起 落架 和 六 轮 小 车式 主 起 落 架
飞机多余物危害及其控制方法

飞机多余物危害及其控制方法摘要:多余物是指产品中存在的外部引进或内部产生的与产品规定状态不符合的物质,其对航空产品研制和试验的危害十分严重,一些重大的质量问题发生的原因就是由于多余造成的。
航空产品研制和试验中视多余物为大敌,自始至终都需要严加预防和控制。
多余物不仅造成飞机系统污染,损伤飞机系统附件、出现卡滞、划伤,使飞机产品附件功能下降或丧失,而且会对飞机系统造成致命故障,危及飞行安全,甚至给我们带来重大经济损失,为此,分析产生多余物的主要环节,进而可以找准多余物产生的原因及环节,编制多余物预防和控制标准的要点,作出相应规定,以推动标准顺利实施,从而预防和控制航空产品的多余物的产生,进一步保证和提高航空产品的研制和修理质量。
在2021年期间外场反馈信息就出现两起受多余物影响而发生的质量问题,其中刹车系统、着陆系统均受影响。
故障现象: 左侧刹车压力偏低,起落架放下慢。
关键词:多余物、危害、质量控制一、多余物的分类多余物有各种各样的状态,最常见的是金属、非金属、人及其附带物。
此外除指定尘埃和介质外,化学反应的产物也是多余物。
(一)按体积分类1.宏观多余物:人的正常视力能看见的一切多余物;2.微观多余物:人的正常视力不能看见,需借助X光射线、放大镜或显微镜、光学分析仪等手段才能观察到的一切多余物。
(二)按种类分类1.金属类多余物:鑫属多余物是非常常见的类型,主要包括脱落的标准零件、加工金属屑、遗忘的装配工具、钻头、焊锡、工艺零件,这些多余物属于控制重点,具有严格控制规定。
2.非金属多余物:该类多余物涵广泛,包括装配使用的非金属,此类多余物控制难度比较大。
3.生物化学多余物:人的毛发、皮屑、指甲汗珠和体液等。
4.有害气体多余物:主要是粘合剂、润滑剂等非金属材料。
二、多余物产生的危害(一)几起典型多余物产生的质量问题2021年9月某型飞机试飞飞行时起落架收放时间不符合规定,原因定位为液压系统油液存在较硬多余物,使起落架锁钩作动筒活塞卡滞。
高升力系统构成及其作用原理

高升力系统构成及其作用原理高升力系统构成及其作用原理引言:高升力是飞行器能够产生在垂直方向上的升力,使其能够在较低速飞行或静止状态下保持悬停或垂直起降。
这对于直升机、垂直起降飞机和无人机等飞行器来说至关重要。
高升力系统是实现这种升力的关键组成部分,它由多个元件组成,每个元件都发挥着重要的作用。
本文将深入探讨高升力系统的构成以及其作用原理,以期帮助读者更全面、深刻和灵活地理解这一主题。
一、高升力系统构成1. 主旋翼系统:主旋翼是直升机高升力系统的核心部分,由旋翼桨叶、旋翼轴和旋翼传动系统组成。
主旋翼通过其快速旋转产生升力,并通过改变旋翼叶片角度控制飞行器的升力和姿态。
2. 尾旋翼系统:尾旋翼系统主要用于抵消主旋翼所产生的扭矩,并对飞行器的姿态进行控制。
它由尾旋翼和尾旋翼传动系统组成,通过改变尾旋翼叶片角度产生反扭矩。
3. 多轴无人机高升力系统:多轴无人机高升力系统由四个或更多的螺旋桨组成,每个螺旋桨都能独立旋转,并通过改变旋转速度和叶片角度来产生控制升力和姿态的效果。
4. 辅助设备:高升力系统还包括一些辅助设备,如涂漆、导流板和风向标等。
这些设备可以改善主旋翼和尾旋翼的效能,提高飞行器的高升力性能。
二、高升力系统作用原理1. 伯努利定理:高升力系统的升力产生基于伯努利定理,即当气体在速度增加的同时,压力降低。
在主旋翼系统中,旋翼桨叶快速旋转产生了一定的气流速度,使得上表面的气流速度增加,而下表面的气流速度较慢。
根据伯努利定理,气流速度增加导致了上表面的气压降低,从而产生了升力。
2. 对流效应:高升力系统通过对流效应来增加升力。
在主旋翼和尾旋翼系统中,叶片的形状以及受到的气动力使得气流在叶片周围进行了弯曲。
这种弯曲和倾斜导致了气流向下流动,与飞行器底部的气流相互作用,产生了额外的升力。
3. 叶尖涡效应:高升力系统中的旋翼叶片尖部产生的涡旋会增加升力。
当旋转的叶片在尖部将快速流动的气体与较慢流动的气体分离时,形成了涡旋。
波音公司的飞机飞行控制系统研究与开发

波音公司的飞机飞行控制系统研究与开发飞行控制系统是飞机安全飞行的关键,对于现代商用飞机来说尤为重要。
波音公司一直致力于飞行控制系统的研究与开发,以提供更安全、高效的飞行体验。
本文将对波音公司的飞机飞行控制系统研究与开发进行探讨。
一、飞行控制系统的重要性飞行控制系统是飞机的核心部件,用于控制飞机在空中的航向、俯仰和滚转等动作,稳定飞机的飞行状态,确保飞行的安全性和稳定性。
优秀的飞行控制系统能够提供精确的操纵性和稳定性,减少飞行员的操作负担,提高飞行的安全性和效率。
二、波音公司的飞行控制系统研究与开发历程波音公司作为全球领先的航空航天技术公司,一直致力于飞行控制系统的研究与开发。
从早期的机械飞行控制系统,到现代的电子飞行控制系统,波音公司不断致力于技术革新和提升飞行安全性。
1. 机械飞行控制系统早期的飞机飞行控制系统主要采用机械控制方式,通过操纵杆和脚蹬等机械装置实现飞行状态的控制。
这种控制方式操作简单,但对飞行员的技术要求较高,容易出现误操作和控制困难的情况。
2. 电子飞行控制系统随着电子技术的发展,飞行控制系统逐渐向电子化方向发展。
波音公司积极引入先进的电子技术,逐步实现飞机飞行状态的电子控制。
电子飞行控制系统能够通过计算机和传感器等设备实时监测飞机的状态,并精确控制飞机的动作,提高飞行的稳定性和安全性。
3. 自动驾驶飞行控制系统随着航空技术的不断进步,自动驾驶飞行控制系统逐渐成为发展趋势。
波音公司积极投入研究和开发自动驾驶技术,实现飞机在特定阶段的自动操控,减轻飞行员的负担,提高飞行的效率和安全性。
三、波音公司的飞行控制系统研究与开发特点波音公司在飞行控制系统的研究与开发中具有以下特点:1. 多学科融合波音公司聚集了众多领域的专业人才,包括飞机设计师、电子工程师、计算机科学家等。
他们通过多学科的融合,共同研究和开发飞行控制系统,保证系统的全面性、稳定性和安全性。
2. 先进的仿真技术波音公司在飞行控制系统的研究与开发中广泛应用先进的仿真技术。
军用高精度直升机飞行控制研究

军用高精度直升机飞行控制研究随着科技的不断发展和进步,军用高精度直升机的研究已经越来越受到人们的关注。
在军事领域中,直升机具备着很重要的作用,它可以空中支援、侦察、避难等多种功能,而高精度直升机更是提高了直升机的作战效能和灵活性。
作为一种复杂的飞行器,高精度直升机的飞行控制是非常重要的。
在整个研究和开发过程中,飞行控制的科技水平起着至关重要的作用。
科学技术的不断进步,为高精度直升机研究带来了新的机遇和挑战。
下面,我们将深入探讨军用高精度直升机飞行控制的研究过程。
一、高精度直升机飞行控制技术高精度直升机的飞行控制技术是直升机研究的核心科技,包括直升机自动驾驶、大力矩控制、自适应控制等多种技术。
其中直升机自动驾驶技术是现代军用直升机飞行控制的重要组成部分。
直升机自动驾驶技术主要包括导航系统、传感器、控制计算机、执行机构和数据通信等。
这些技术的应用使得高精度直升机可以在充分考虑环境因素的基础上自主完成任务,大大提高了飞行安全性、精度和效率。
二、高精度直升机飞行控制系统高精度直升机的飞行控制系统是由控制系统硬件和控制系统软件两部分组成。
其中,控制系统硬件包括控制计算机、控制器、传感器、执行机构等运动控制硬件;而控制系统软件则包括航迹规划、控制算法设计、控制器设计、仿真和测试等控制策略的软件设计。
当控制系统的硬件和软件协同工作时,实现高精度直升机的自动驾驶和精准操纵变得更加可靠和高效。
三、高精度直升机飞行控制实现高精度直升机飞行控制实现主要分为两种方式:一是直接控制,也就是直接控制直升机的飞行姿态和飞行质量;二是间接控制,依靠飞行着陆系统等不同的传感器和设备来实现处理和控制直升机的姿态和油门。
同时,精密GPS系统和惯性等测量仪器也是高精度直升机飞行控制的必要之物。
这些技术的应用,不仅可以提高直升机的飞行效率,更可以保证直升机安全的完成任务。
四、高精度直升机飞行控制的应用在目前的军事环境中,高精度直升机已经成为了不可替代的军事武器之一。
案例分析:波音777飞机的改进
波音777飞机的改进
1、团队是由员工和管理层组成的一个共同体,他合理利用每一个成员的知识和技能协同工作,解决问题,达到共同的目标。
波音以前“等级式”的组织结构导致产品在生产之前成本就很高,导致生产效率低,成本高。
变成工作团队后,首先降低了成本,其次团队成员来个各个部门,合理的利用每一个成员的知识和技能协同工作,更好地解决问题,满足客户需求。
2、多功能型团队。
它能使组织内不同领域员工之间交换信息,激发产生新的观点,解决面临的问题,协调复杂的项目。
波音公司的团队不仅是解决某些已出现问题,而是在飞机生产之前就参与到设计之中,穿插在项目中的各个环节,考虑到可能出现的问题,协调项目的进行。
3、因为一个团队之中人数太少,那么这个团队的创造能力和多元化能力都会有所损失。
如果人数太多,成员之间将无法进行有效的沟通,8-10人正好。
4、特征:团队人数适中;目标明确;团队成员充分参与;公开沟通;。
关于777着陆操纵技巧的研讨1218

机头向上的旋转
起落架向下的旋转 飞机整体向下运动
松杆与过载
在欠能量的着陆拉平过程中,拉杆不一定能明显 减小下降率,但是松杆却能明显增大下降率 松杆导致机头下附,机头下俯导致升力不足,二 者叠加,容易形成过载大
自动油门收的更快,更 快的带杆以补偿能量损 失
自动油门收的很慢或不 收,不得不稳杆以便进 入下沉
慢收或不收油门以补偿能量损失,尽 可能的保持正常的拉平杆量
人工收油门以增加能量损失,使飞机 能正常下沉,机组能正常拉平
拉平手法
当跑道头从机头下越过并消失后,将视线转移到 跑道的远端。转移视线有助于在拉平时控制俯仰 姿态。保持恒定的空速和下降率有助于确定拉平 点。当主轮在跑道上方大约20 至30 英尺时,增加 大约2-3°的俯仰姿态开始拉平。这可以减小下降 率。
自动油门的使用方法(续)
对于777F来说,即使有少量的不利天气影响,也 不必增加进近速度,因为绝大多数时候,777F的 操纵响应都比较好,惯性感觉也不如773ER大
对于777F 200吨以下的着陆,除非天气情况十分
糟糕,不要再额外增加进近速度,此时777F的进 近速度本身就高于匹配的进近速度,如果继续增 加,则会减小进近姿态,增加三点接地的风险。
自动油门的使用方法(续)
自动油门飞行 人工干预自动油门飞行 少量顶杆,收油门 保持杆量,收油门 通过收油门损失速度的方法修正航径, 回中后,加油门即可 少量带杆,加油门 保持杆量,加油门 通过加油门增加速度的方式修正航径, 回中后,收油门即可
航 径 高 航 径 低 下 沉 快 下 沉 慢
从Boeing777看现代飞行控制系统的组成和功能

Actuator Control Electronics
Redundancy in the form of FOUR ACEs
Provide an Interface between the FBW analog domain & digital domain.
The PFCs receive the airplane inertial and air data from the ADIRU / SAARU
Surface Commands are transmitted to the ACEs via the ARINC Bus
ACEs convert the digital commands to analog commands to electrically control the Actuators.
Three Primary Flight Computers provide Triple redundant computational channels for the primary flight control system.
Each PFC receives data from all three ARINC Control buses. Each PFC transmits data on its associated bus only.
Each lane contains it’s own power source. Each lane has it’s own ARINC 629 terminals to communicate with the buses.
高升力系统构成

高升力系统构成1. 引言高升力系统是指通过产生巨大升力来实现飞行器的垂直升降或短距离起降的技术。
高升力系统的构成对于飞行器的性能起着至关重要的作用。
本文将深入探讨高升力系统的构成,包括主要的组成部分、工作原理和应用领域。
2. 高升力系统的组成2.1 主翼高升力系统的核心部分是主翼,主要通过气动力作用产生升力。
主翼的形状和尺寸对于高升力系统的效果有着很大的影响,常见的主翼形式包括矩形翼、梯形翼和椭圆翼等。
此外,主翼的后缘通常会配备襟翼、襟缝翼或副翼等可变翼面,用于调节主翼的升力和阻力。
2.2 襟翼襟翼是高升力系统中的重要组成部分,通常位于主翼的前缘。
襟翼的主要作用是在起降和低速飞行时增加主翼的升力,并改善飞行器的稳定性和操纵性能。
襟翼有多种形式,包括单缝襟翼、双缝襟翼和多缝襟翼等,不同形式的襟翼在改善升力性能和降低阻力方面有着不同的效果。
2.3 襟缝翼襟缝翼是一种与主翼上表面连续的可变翼面,通过在起降过程中展开或收缩来改变主翼的形状。
襟缝翼的作用是在起降时增加主翼的升力和阻力,从而实现飞行器的短距离起降或垂直升降。
襟缝翼常用于垂直起降飞行器和短距离起降飞机等领域。
2.4 侧缝翼侧缝翼是一种位于主翼上表面的可变翼面,主要用于调节主翼横向力和侧向稳定性。
侧缝翼的工作原理是通过展开或收缩来改变主翼的侧向气动特性,进而调节飞行器的姿态和操纵性能。
侧缝翼广泛应用于垂直起降飞行器和短距离起降飞机等领域。
2.5 发动机喷口高升力系统还包括发动机喷口,通过向下喷出高速气流产生反作用力,提供向上的升力。
发动机喷口的位置和喷口形式对高升力系统的效果有着重要的影响。
常见的形式包括圆形喷管、方形喷管和喷流分离喷管等。
3. 高升力系统的工作原理高升力系统的工作原理基于伯努利定律和牛顿第三定律,通过改变主翼和附加翼面的形状和位置来改变流动的速度和方向,进而产生升力和阻力。
主要的工作原理包括下述几点:3.1 负压升力通过将高速气流在主翼和襟翼等翼面的上表面和下表面之间产生速度差,形成负压区域,从而产生升力。
波音777电传飞控系统的容错设计浅析

波音力7电传飞控系统的容错设计浅析周靑,张锐(中航工业西安航空计算技术研究所,陕西西妥710068)摘要:电传飞控系统必须满足极其严苛的功能完整性和可用性要求,其核心在于相关硬件资源的容错设计。
在波音777上,与飞行控制相关的硬件系统,如飞控计算机,ARINC629总线等,都具备三余度的余度结构。
多余度系统的设计还需要包含部件隔离和功能隔离以解决共模故障的问题。
关键词:容错;电传飞控系统;共模故障中图分类号:V249.1文献标识码:A文章编号:1673-1131(2019)10-0046-021概述波音777是波音公司研发的首款电传飞机,其飞控系统采用了PFC+ACE+数字总线的架构。
这种架构有利于系统在故障时灵活配置余度,也利于提高系统的可靠性和可维修性。
本文的目的是分析应用于波音777主飞行控制系统的容错技术,重点分析电传飞控计算机体系结构的设计考虑。
2容错设计航空公司为了提高飞机调度可靠性,提出了延迟维修的概念。
这种概念要求对重要的数字航空电子系统,如PFC、AD~ IRS(航空数据惯性参考系统〉和AIMS(飞机信息管理系统)等,进行容错设计。
航空公司对飞机的整个生命周期最优的冗余度进行了研究,因此这些计算机的冗余结构能够最大限度地保证对飞机调度的正常运行同时使成本最优。
当飞机发生随机硬件故障时,其修复可以推迟到一个方便的时间和地点,从而减少了航班的延迟或取消。
2.1ARINC629数字数据总线ARINC629数据总线[1]是一个时分多路复用系统。
它包括多个发射器,自主终端接入。
最多可连接120个用户。
用户使用耦合器和终端与总线通信。
终端访问是自主的。
在终端传输之后,三个拥有不同的协议定时器可以确保它不会再次传输,以便所有其他终端都有机会传输。
2.2主飞控计算机PFC主飞控计算机包含三个完全相同的计算机通道PFC,而每个PFC又包含了三个支路,每个支路都采用了不同的处理器、接口及外围电路,避免出现共性故障,如图1所示。
请问飞机上使用的电传操纵系统是怎么回事,怎么还有3余度?
请问飞机上使⽤的电传操纵系统是怎么回事,怎么还有3余度?与“电传操纵系统”对应的是“机械操纵系统”,是⼀种依托电⼦和计算机技术发展起来的新型战机操纵系统。
⾄于我们经常听到的“三余度”,简单来说就是3套飞⾏控制计算机、四余度就是4套,更多的余度可以保证当飞控某⼀部分故障和错误时时其他备份能够继续使飞机正常飞⾏。
但这个余度设计时必须恰到好处,设计不当反⽽降低可靠程度,所以航空⼯业真不是随随便便的国家就能搞得。
电传操纵系统“电传操纵系统”对应的是“机械操纵系统”,早期飞机的操纵主要有2种:纯机械操纵和液压操纵。
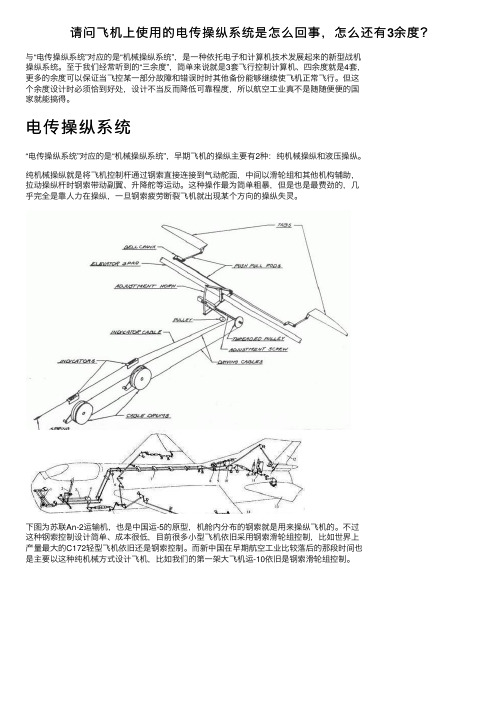
纯机械操纵就是将飞机控制杆通过钢索直接连接到⽓动舵⾯,中间以滑轮组和其他机构辅助,拉动操纵杆时钢索带动副翼、升降舵等运动。
这种操作最为简单粗暴,但是也是最费劲的,⼏乎完全是靠⼈⼒在操纵,⼀旦钢索疲劳断裂飞机就出现某个⽅向的操纵失灵。
下图为苏联An-2运输机,也是中国运-5的原型,机舱内分布的钢索就是⽤来操纵飞机的。
不过这种钢索控制设计简单、成本很低,⽬前很多⼩型飞机依旧采⽤钢索滑轮组控制,⽐如世界上产量最⼤的C172轻型飞机依旧还是钢索控制。
⽽新中国在早期航空⼯业⽐较落后的那段时间也是主要以这种纯机械⽅式设计飞机,⽐如我们的第⼀架⼤飞机运-10依旧是钢索滑轮组控制。
液压操纵,液压操纵是钢索滑轮组控制的升级版,由操纵杆直接带动钢索改为操纵杆控制液压系统,由液压组件带动⽓动舵⾯运动。
这种操纵⽅式⽐纯钢索滑轮组要省⼒⼀些,但是依旧没有改变操纵杆和舵⾯直接连接的关系,还是⼀种机械操纵⽅式。
早期波⾳737号称“空中健⾝房”就是因为采⽤的液压操纵⽅式使飞⾏员操纵较电传的A320吃⼒地多。
为了保证飞机操作的可靠性往往使⽤多套液压系统,但液压系统⼤量的液压管和液压组件挤占了⼤量的重量。
⽽且对于较为复杂的⽓动布局液压系统也没有办法做到完美控制,⽐如飞翼结构的机型因为没有⽔平尾翼和垂直尾翼操纵起来极为⿇烦,虽然从20年代就开始研究但⼀直没有投⼊实⽤化,直到后来数字化电传操纵的出现才出现了B-2轰炸机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统 余度 管理方 法进 行研究 。在 余度 管理 方 法 的设 计 过 程 中 , 分考 虑 了布 线技 术 、 件 设 计 技术 及 与 软 充 硬 件 相结合 的方法 , 但简化 了襟 缝翼 控制器 的硬 件设 计 , 不 同时 也简 化 了控 制 器软 件 的设 计难 度 , 高 了 系统 提 可靠 性 . 用 到的方 法对 同类 系统设 计有一 定 的参考 价值 。 所 关键 词 : 度管 理 ; 余 表决 ; 控 ; 错 监 容
尽 可能小 。
计算 机 间 的同步技 术 和异 步 技 术 ] 同步技 术 能 够 . 消 除各计 算机 通道 间 的 时钟 误 差 积 累 , 而能 够 保 因 证几 乎 同时 对 余 度 传 感 器 信 号 进 行 采 样 、 理 、 处 均 衡、 表决 。 同步 功 能 必 须 仔 细设 计 , 避 免 引 入 单 以
3 系统 余 度 管 理 策 略
系统信 号 的表 决 监 控 主 要 由每 台控 制 器 的 内 部通 道来 实 现 , 少 了控 制 器 问 信 号 的交 互 , 了 减 为
缝翼 有 2个接 近传感 器检 测缝翼 倾斜 。襟翼 操纵 系
统 的 电一 机传 动 由动力 驱 动装 置 、 力管 、 轮 箱及 扭 齿 滚珠 丝杠 副组 成 。缝翼 操 纵 系统 的电 一 机传 动 包 括 动 力驱 动装 置 、 力 管 、 转 作 动 器 及 小 齿 轮 和 齿 扭 旋
( )硬 件 自监控 面 , 括 处 理 器 、 1 包 存储 器 、 入 输
迟, 降低 系统稳 定性 , 使设计 复杂 化 。
本文 充分利 用 同步及 异 步 技术 的优 缺 点 . 针对
波音 7 7飞机高 升力控 制 系统进行 了余度 管理 策 略 7
的研 究 。
输 出等 。这 是硬件 级 的 自监 控 、 线监 控 技 术 及 看 在 门狗技 术 , 测 本 通 道 内部 硬 件 系统 的 有 效 性 , 检 一 旦确定 硬件 为永 久 故 障 , 输 出状 态信 号 , 接 关 则 直 闭本 通道 的发送器 终端 ( )外 界输入 信 号 监 控 面 , 括模 拟 量 和 离 散 2 包 量 的输 入 和输 出 。为 了减 少 通道 问 的信 息交 互 、 降 低多 信号 的管理难 度 , 对输 人 信 号 主要 采 用 了在 线 监控 的方法 , 对输 出信 息采 用 了控 制器 内部 通 道 间 比较 表决 的策 略 。 ( )控 制律计 算监 控 面 , 3 包括 控制 律软件 输 出 、
简述 _ 5
波音 7 7飞 机高 升力控 制系 统采用基 于数 字计 7
算机 的控 制方 案 , 为前 缘缝 翼 和后 缘襟 翼 驱保 BT 机 和维
护 功能 高 升力控 制 系 统 主 要 由 电子 控 制 部 分 和 电机 传 动两 大部 分 组 成 。 电子 控 制 部 分 包 含 两 台完 全
s se d sg y tm e in.
[ e rs e u d nyMaae e t V t;M nt ;F ut o rne K ywod ]R d n ac n gm n ; o e o i r a lT l a c o e
0 引言
为 了保 证 飞行 控 制 系 统 的任 务 可 靠 性 和 安 全 可靠性 , 飞行控 制 系 统设 计 中普 遍 采用 了多 余 度 在 容错 体系结 构 _ , l 即从 飞控 计算 机 、 感 器到 舵 机 ] 传 的配置都 存 在 余 度 。余 度 设 计 技 术 的核 心 是余 度 管理 技术 。 通 过 余 度 管 理 技 术 , 系 统 高 效 运 行 , 使 最 大限度地 提 高系统 可靠 性 和 飞行 安 全 性 , 供 故 提 障瞬态保 护 . 使 系 统 在 发 生 故 障后 。 能 的 降 低 并 性
感 器数 据采 样 的 时 间差 大 , 坏 情 况 下 , 近 全 计 最 接
飞行 控 制 系 统 余 度 管 理 主要 采 用 了余 度 飞 控
算帧 , 因而监 控 门限 值 必须 足 够 大 , 以允许 通 道 差 ,
民用 飞 机 设 计 与研 究
Ci l r r f e i n & Re e r h vi Ai a t D s g c sac
相 同的 双通道 的襟 缝翼 控 制 器 , 即控 制通 道 和 监控
通道 。 通道采 用 不 同 的微 处 理 器 。电子 控 制 部分 两
还包 含 位 于 襟 缝 翼 操 纵 手 柄 上 的 4余 度 传 感 器 (V T 、 R D ) 每侧 2余度 襟翼 位 置传 感 器 、 每侧 2余度
( .T eFr i r t ntue A i i n ut op rt no hn , ia 0 9, hn ; 1 h i t r a stt, va o Id s yC ro i f i X ’ n7 8 C ia sA c fI i tn r ao C a 1 0
2 i nArrf Id s o ay A it nId s C roa o f hn , i a 10 9 C ia .X i a n ut C mpn , v i n ut o rt no C ia X ’n7 0 8 , hn ) a c t y r ao  ̄ p i
因此 容 易引起虚 警 和误 切 ; 步 技 术会 引起 作 动器 异 很 大差 异 、 大 噪 声 、 力 纷 争 严 重 , 加 传 输 延 很 使 增
统可靠 性 、 件级 故 障 一 部 工作 容 错 能力 、 号 一 致 性 信
及控 制律重 构 的要 求 。在 襟缝 翼 控 制 器 中 , 了 满 为 足系 统需求 , 系统 设计 有 三个 比较 监控 面 , 括 : 包
摘 要: 飞行 控制 系统普遍 采 用余度 技术 来 提高 自身 的任 务 可靠 性 。余 度 部 件效 能 的发 挥 程 度 主要 取 决 于余 度 管 理策 略和 方法 。根据 波音 7 7飞机 高 升力控 制 系统 的基本 构架 , 过在 线 监控 与 信 号表 决 相结 合 的方 法 对 7 通
点 故障 ( 同步 功 能失 效 ) 使 所 有 计 算 机 失 效 。 同 而 步设 计在 本 质 上 是 不 容 错 的_ 。异 步 技 术 可 以增 4 J 加抗 电磁 干扰 和雷 击 的 能力 , 时具 有对 短 时 电磁 同
干扰 不敏 感 、 引入 单 点 故 障 概 率 小 、 要 求 精 确 一 不 致、 容错 性 能好 等特 点 。但 异 步 技术 往 往 会 导致 传
Th f ce c fr d n n y c mpo e t r i l e i e y r d n a y ma a e n tae i s a t d . e e i n y o e u da c o i n n s a e man y d cd d b e u d nc n g me t sr t ge nd meho s Ba e n Bo i g 7 7 ar r tHih lf c n rls se a c t cu e,r d n a c na e n t o ssud e n s d o en 7 ic a g it o to y tm rhi t r f e e u d n y ma g me tme h dswa t id i t i a rb he c mb n to f o ln n tr a d sg a oi g Th r ip sn t o s a d r e in h s p pe y t o i ai n o n i e mo io n in lv tn . e wie d s o ig meh d ,h r wae d sg meh d n ot r e i n me h dsa ef lyc n ie e n t e p o e so e in n e u da c na e n t - t o sa d s fwa e d sg t o r u l o sd r d i h r c s fd sg i g r d n n yma g me tme h o s,a e u t o n y t efa /sa lcr n cu thad r u lo i ot r r i l i d,t e s se r l - d s ar s l,n to l h lp ltee to i ni r wa eb tas t s fwa ea e smp i e s f h y tm ei a bi t s as mp o e l y i lo i r v d.Th sg o c p n t o s us n t i a r c n b mp ra c e e e c o smia l e de in c n e ta d me h d e i h s p pe a e i o t n e r fr n e t i lr
杜永 良 潘妍 红 uY nl n P nY n o g /D o g a g a ah n i
(.中国航 空工 业集 团公 司第一 飞机 设计研 究 院 , 1 西安 70 8 ; 10 9
2 .中航工 业西 安飞 机工业 ( 团 ) 限责任 公 司 , 安 7 0 8 ) 集 有 西 1 0 9
分 析 报 道
An l i p ayss Re o ̄
波 音 7 7飞 机 高 升 力 控 制 系 统 7 余 度 管 理 分 析
Re dund nc a g m e o i h f nt ol a y M na e nt f r H g Lit Co r
S s e s d o Boe ng 7 7 Ai c a t y t m Ba e n i 7 r r f
缝翼 位置 传感器 、 每架 飞机 上有 1 6个线 位移 传感 器 (V T ( L D ) 每个襟 翼 驱动臂 上有 2个 ) 于 监视 襟翼 用 倾斜 , 侧机翼 上 内侧缝 翼有 4个 接 近传感 器 、 每 外侧