角度复用光信息存储与图像识别实验讲
角度复用的光学信息存储

• 生折射率调制的相位光栅。进一步的理论分析略去。 • 实验光路图(简单光栅存储系统)
图像存储系统
• 实验内容和步骤
• 记录一个全息光栅,测量晶体的动态写入曲线 • 按照图三图中虚线的示意正确连接两个快门、振镜和 功率计,确保各仪器接口都正确。注意快门1定 义为物光路的快门,快门2定义为参考光路的快 门。 • 打开激光器、计算机及其他一起开关,启动全 息存储实验演示系统软件。注意本实验因为使 用了激光,实验过程中一定要注意眼部的安全, 尤其是不能让激光直接射入眼睛,尽量避免注 视激光光斑,一般应佩戴护目镜。
• 两年后,Chen等人认识到“光损伤”材料是一种优质的
•
• •
•
光数据存贮材料,并首次在LiNbO3内进行了全息存储.随 后,人们发现通过均匀光照或加热, 可以擦除这种“光损伤”痕迹,使晶体恢复原态。由于 “损伤”与“复原”是指光照下晶体折射率的变化及复 原过程,现在人们普遍将这种效应称为光折变效应。采 用Kukhtarev等人提出的带输运模型, 光折变晶体内部复杂的光电过程可以描述为: 1,在适当波长的空间非均匀分布的光辐照下,晶体内的 施主(受主)被电离产生电子(空穴);同时电子(空 穴)从中间能级受激跃迁至导带(价带)。 2,光激发载流子在导带(价带)内可自由迁移;光激发 载流子具有三种迁移机制:扩散(载流子由于浓度不同 而扩散迁移)、
• 注意各项扫描参数的选择,应使“起始位
置”+(“扫描步数”*“步长”)/2 = ―记录 位置”。读出 过程中要确保衍射光完全被功率计接收。 • 光栅的选择性曲线将显示在计算机显示器上, 实验数据将保存在文件中。 • 对实验所的数据按要求进行处理后,估算光栅 选择角的大小。 • 记录和读出一幅全息图像 • 取下晶体,按图四要求在图三的基础上加入针 孔滤波器及其后面的准直透镜、SLM、两块傅里叶 变换透镜和CCD,并调节中心共轴。注意不要 让激光未经衰减直接照射CCD,经常用强光照射的
光信息技术5 联合傅里叶变换相关图像识别

实验五 联合傅里叶变换相关图像识别光学图像和特征的分析与识别是近代光学信息处理的一个重要研究领域。
人们一直在研究能够自动识别图像和特征的机器或系统,在工业上用于自动识别卫星遥感图像中的特征地形地貌,识别文件和信用卡上的签字,将现场指纹和大量档案指纹进行比对,从生物切片的显微图像中识别病变细胞,在军事上则用于识别空中和地面目标等等。
光学图像特征识别系统的基本结构是光学相关器,具有高度并行、大容量、快速处理等特点,在一些领域中已取得接近实用的成果。
联合傅里叶变换(Joint-Fourier transform)是重要的相关处理,在指纹识别、 字符识别、目标识别等领域已逐步进入实用化阶段。
本实验使用空间光调制器实现了实时光电混合处理,是典型的近代光学信息处理实验。
一、实验原理1. 联合傅里叶变换功率谱的记录联合傅里叶变换相关器(joint-Fourier transform correlator , JTC )简称联合变换相关器,分成两步,第一步是用平方记录介质(或器件)记录联合变换的功率谱,如图1所示。
[]()(,)(,)(,)exp exp (,)exp (,),()2S u v f x a y g x a y i xu yv dxdy f 22i au F u v i au G u v 1f f πλππλλ∞∞-∞-∞⎡⎤=++--+⎢⎥⎣⎦⎡⎤⎡⎤=+-⎢⎥⎢⎥⎣⎦⎣⎦⎰⎰图中L 是傅里叶变换透镜,焦距为f ,待识别图像(例如待识别目标、现场指纹)的透过率为f (x ,y ),置于输入平面(透镜前焦面)xy 的一侧,其中心位于(-a , 0);参考图像(例如参考目标、档案指纹)的透过率为g (x , y ),置于输入平面的另一侧,其中心位于(a , 0)。
用准直的激光束照射f ,g ,并通过透镜进行傅里叶变换。
在谱面(透镜的后焦面)uv 上的复振幅分布如果用平方律记录介质或用平方律探测器来记录谱面上的图形,得到:(,)(,)exp (,)*(,)exp *(,)(,)(,),()2222S u v F u v i au F u v G u v f 2i au F u v G u v G u v 2f πλπλ⎡⎤=+⋅⎢⎥⎣⎦⎡⎤+-⋅+⎢⎥⎣⎦图1 联合傅里叶变换功率谱的记录即联合变换的功率谱。
第6章复用技术

6.2 共同体积复用技术
共同体积复用技术指的是在材料的同一体积中进行 多重存储的技术。
全息存储的共同体积复用就是全息图K空间的复用。 复用技术的目的就是在波矢k空间中容纳尽可能多的 光栅K矢量。
采用相同参考光角度,只涉及记录材料平面 与读写头之间的相对位移。
空间复用技术
方法一:固定读 写光路,移动记 录材料;
方法二:固定记 录材料,采用光 束偏转器件和精 心设计的光学系 统,使物光和参 考光同步地沿材 料表面移动
空间复用技术
平面全息图的存储容量与其填充因子F成正比, 且F的最大值为1,故其存储密度的最大值仍 为1/2。
反射光路、邻面入射光路
3. 角度复用的存储容量
对于角度复用,按位计算的存储容量为每个 全息图中存储的像素数目Mp与在共同体积中 的角度复用方法所重叠的全息图数目Mang之积。 将Mang称为角度复用度。
根据体光栅的角度选择性,对于纯相位光栅, 角度复用度的数量级为Mang=nd/。
实际中对存储容量的限制主要在于记录材料 折射率调制度的有限动态范围和有限的参考 光角度调节范围。
第六章 复用技术
6.1 空间复用技术
将页面信息的傅立叶变换全息图阵列记录在 存储材料的不同的空间区域的技术,称为空 间复用。(主要针对平面型记录材料)
由于相邻全息图在空间是不重叠的,再现出 的页面之间可以完全避免串扰噪音;每个全 息图的衍射效率都可以达到单个全息图存储 所能得到的最大(饱和)衍射效率。
2. 角度复用的光路配置
《信息技术与人工智能基础》项目7 图像识别

• 项目展望
人们一直致力于开发各种智能工具辅助人们的生产生活,比如机器人的研制,但是 要想使得机器人可以像人一样运动,辅助人们的工作生活,那么前提是机器人必须具备类 似于人的视觉系统,能够识别物体以及场景,真正的智能工具应该要具备“视觉”。目前 的图像识别技术是作为一个工具来帮助我们与外部世界进行交互,为我们自身的视觉提供 强有力的辅助和增强,所有的行动还需我们自己完成。而当机器真正具有了视觉之后,它 们完全有可能代替我们去完成这些行动。总体而言,目前的图像识别还存在着很多困难, 但是随着人类对自己视觉的逐步了解,一个通用的图像识别技术终会被研究成功。未来的 图像识别技术将会同其他人工智能技术融合在一起,更加智能地出现在我们的生活中,为 人类社会的更多领域带来重大的应用。
在互联网的海量图片、视频资料中,不少涉政敏感信息、暴力、低俗等内容的图片充斥其中,这些图 片严重影响着国家安全和网络文明。在图像识别还未发展成熟以前,需要人工随机抽取图片对图片内 容进行审核。借助人工智能、深度学习和大数据样本等技术,这一问题得到了很好地解决。当然,智 能图片鉴别模型并不能完全取代人工鉴别,相比人工审核,机器还很难理解内容背后的深意。最佳的 审核方式是智能为主,人工为辅。先由智能图片鉴别模型将可疑的图片筛选出来,再由人工审核一遍, 这样既能保证效率又能保证准确率。
• 传统分类算法
特征提取:(1)颜色直方图、局部二值模式、方向梯度直方图特征ห้องสมุดไป่ตู้尺度不变特 征变换、Gabor特征、区域协方差描述符
(2)主成分分析(Principal Component Analysis,PCA)、线性判 别分析(linear discriminant analysis,LDA)、流形学习(manifold learning) 和稀疏编码(Sparse Coding,SC)
图像识图知识点总结

图像识图知识点总结图像识别的应用十分广泛,包括人脸识别、车牌识别、物体识别、手势识别、文字识别等。
在实际应用中,图像识别技术可以用于安防监控、智能交通、医疗诊断、工业质检、无人驾驶等领域。
图像识别的发展不仅推动了人工智能技术的进步,也为各行业提供了更多的发展机遇。
一、图像识别的基本原理图像识别的基本原理是利用计算机视觉技术对图像进行特征提取和分类。
图像特征提取是指从图像中提取出有代表性的特征,用于描述图像的内容和结构。
常用的图像特征包括颜色特征、纹理特征、形状特征、边缘特征等。
图像分类是指利用提取的特征对图像进行分类和识别。
常用的图像分类算法包括支持向量机(SVM)、卷积神经网络(CNN)、K近邻(KNN)等。
图像识别的基本原理可以分为以下几个步骤:1.图像获取:利用相机、摄像头等设备获取图像。
2.图像预处理:对获取到的图像进行去噪、增强、尺寸标准化等处理,以提高后续处理的效果。
3.特征提取:从预处理后的图像中提取出具有代表性的特征,用于描述图像的内容和结构。
4.特征表示:对提取的特征进行合适的表示和编码,以便于后续的分类和识别。
5.分类识别:利用提取的特征对图像进行分类和识别,以实现对图像的自动识别和理解。
二、图像识别的关键技术图像识别的关键技术包括特征提取、特征表示和分类识别三个方面。
1.特征提取技术特征提取是图像识别的基础,它的好坏直接影响了后续的分类和识别效果。
常用的特征提取方法包括颜色直方图、灰度共生矩阵、Gabor滤波器、边缘检测算子等。
其中,颜色直方图是用来描述图像的颜色分布特征,灰度共生矩阵是用来描述图像的纹理特征,Gabor滤波器是用来描述图像的纹理和形状特征,边缘检测算子是用来描述图像的边缘特征。
这些特征提取方法可以有效地提取出图像的重要特征,用于后续的特征表示和分类识别。
2.特征表示技术特征表示是对提取的特征进行合适的表示和编码,以便于后续的分类和识别。
常用的特征表示方法包括主成分分析(PCA)、独立成分分析(ICA)、小波变换、局部二值模式(LBP)等。
物理实验中的图像识别与图像处理技术
物理实验中的图像识别与图像处理技术近年来,随着计算机技术的飞速发展,图像识别和图像处理技术在物理实验中的应用变得越来越重要。
这些技术不仅可以帮助科学家更好地理解实验结果,还可以大大加快实验过程,并提高实验数据的准确性。
在物理实验中,图像识别技术主要用于自动识别实验中产生的图像,例如光谱图、电子显微镜图像等。
传统的图像识别方法往往需要人工参与,费时费力且易出错。
而利用图像处理技术,科研人员可以通过图像识别算法,将大量的图像数据自动进行处理和分类,大大提高了识别的准确性和效率。
在实验室中使用图像识别技术可以极大地简化工作流程。
以光学实验为例,科学家通常需要通过显微镜观察和测量试样的微观结构。
传统的方法是依靠肉眼观察并记录结果,这种方法需要大量的人力和时间。
而借助图像识别技术,科学家可以使用高清晰度的数码相机将实验图像记录下来,然后使用图像处理软件进行分析和测量。
这样不仅能够大幅度提高实验效率,而且还可以减少人为操作错误的可能性。
在实验数据分析中,图像识别和图像处理技术也扮演着重要角色。
例如,科研人员常常需要测量光谱曲线的峰值位置和峰值强度,这需要对图像进行分析和处理。
利用图像处理技术,科学家可以将光谱图像转化为数值数据,再通过计算机进行处理和分析,从而得到更加精确的实验结果。
此外,图像处理技术还可以帮助科研人员进行图像增强,提高实验数据的可读性和可视化程度。
除了图像识别技术,图像处理技术在物理实验中同样发挥着重要作用。
物理实验中产生的图像往往包含大量的噪声和干扰信号,这些因素会影响数据的准确性和可信度。
利用图像处理技术,科学家可以通过去噪、滤波等方法降低图像中的噪声,提高实验数据的可靠性。
例如,在电子显微镜图像处理中,科学家可以使用滤波算法对图像进行去噪,使得图像的细节更加清晰可见。
此外,图像处理技术还可以用于物理实验中的图像重建和三维重建。
通过对实验图像的处理,科学家可以还原出原始物体的形状和结构,进而进行更深入的研究。
全息光学信息存储解读

光信息专业实验:全息图像存储中山大学光信息专业实验报告:全息图像存储(2014年4月24日星期四)【实验目的】1.了解全息照相的基本原理和基本规律。
2.了解傅立叶变换全息图的基本原理。
3.掌握全息图像的存储和提取信息的方法。
【实验用具】He-Ne激光器、4f系统、防震台、秒表、尺子、底片、毛玻璃屏D76显影剂、F5定影液、夹子、电吹风机、抹布【实验原理】激光全息存储技术是一种利用激光干涉原理将图文等信息记录在感光介质上的大容量信息存储技术。
目前,这种信息存储技术是通过将缩微胶片上的影像转变为光信息,然后制出存储密度很大的全息图。
所谓全息照片就是一种记录被摄物体反射(或透射)光波中全部信息的先进照相技术。
全息照片不用一般的照相机,而要用一台激光器。
激光束用分光镜一分为二,其中一束照到被拍摄的景物上,称为物光束;另一束直接照到感光胶片即全息干板上,称为参考光束。
当光束被物体反射后,其反射光束也照射在胶片上,就完成了全息照相的摄制过程。
反射激光全息图像成像原理是将入射激光射到透明的全息乳胶介质上,一部分光作为参考光,另一部分透过介质照亮物体,再由物体散射回介质作为物光,物光和参考光相互干涉,在介质内部生成多层干涉条纹面,介质底片经处理后在介质内部生成多层半透明反射面(例如6微米厚的乳胶层里可以有20多个反射面),用白光点光源照射全息图,介质内部生成的多层半透明反射面将光反射回来,迎着反射光可以看到原物的虚像,因而称为反射激光全息图。
全息照相主要分为两步,即全息记录和波前再现。
1.全息记录如图1所示,将激光器输出的光束分为两束,一束投射到记录介质上,称为参考光束;另一束投射到物体上,经物体反射或透射后,产生物光束,也到达记录介质。
两光束在记录介质上形成干涉条纹,把干涉条纹记录下来即得到全息图。
干涉条纹的明暗对比程度反映了物体上各处发光的相对强度。
因为射到底片上的参考光的强度是各处一样的,各处物光的强度不同,其分布由物体的发光决定,这样参考光和物光干涉时形成的干涉条纹在底片上各处的浓淡也不同。
高中信息技术课程中如何教授人工智能图像识别技术知识

理解人工智能图像识别技术的概念
介绍人工智能图像识别技术的基本概念和原理 讲解人工智能图像识别技术的应用场景和优势 介绍人工智能图像识别技术的发展历程和现状 讲解人工智能图像识别技术的主要技术和方法 介绍人工智能图像识别技术的未来发展趋势和挑战
掌握人工智能图像识别技术的应用场景
01
医疗领域:疾病诊断、病理分析等
知识讲解:讲解人工智能图像识别的基本原理和技术实现方 式
基本原理:介绍图像识别的基 本概念、原理和流程
技术实现方式:讲解图像识别 的技术实现方式,如深度学习、 神经网络等
案例分析:通过具体的案例分 析,让学生更好地理解图像识 别的基本原理和技术实现方式
实践操作:让学生通过实际操 作,掌握图像识别的基本原理 和技术实现方式
注重实践操作:通过实际操作,让学生 更好地理解和掌握人工智能图像识别技 术知识
根据学生反馈,改进教学方法和手段
01
增加互动环节,提高学生参与度
采用案例教学法,让学生通过实际 案例学习
02
03
利用多媒体技术,提高教学效果
增加实践环节,让学生通过实际操 作掌握知识
04
05
及时调整教学进度,满足不同学生 的学习需求
遵守课堂纪律,尊重老师和同学
添加 标题
主动提出自己的观点和想法,与他 人分享和交流
添加 标题
认真完成课堂作业,表现出对知识 的理解和掌握
添加 标题
积极参与小组合作,共同解决问题
实验操作评价
实验目的:掌握 人工智能图像识 别技术的基本原
理和方法
实验内容:使用 Python编写图像 识别程序,实现 对图像的识别和
讲解图像识别技术的实际应 用案例和效果分析
图像识别(信息技术)-详解

图像识别(信息技术)详解随着科技的不断发展,图像识别技术在信息技术领域的应用越来越广泛。
图像识别是指通过计算机技术对图像进行处理、分析和理解,使其能够识别图像中的物体、场景、文字等信息。
本文将详细介绍图像识别的基本概念、技术原理、应用领域以及未来发展趋势。
一、基本概念图像识别是指计算机对图像进行处理、分析和理解的过程,使其能够识别图像中的物体、场景、文字等信息。
图像识别技术主要涉及图像处理、机器学习、模式识别等多个领域。
其中,图像处理是指对图像进行预处理、特征提取、图像分割等操作,以便后续的识别和分析。
机器学习是指通过算法让计算机从数据中学习规律,提高识别准确率。
模式识别是指根据图像中的特征,对图像进行分类和识别。
二、技术原理1. 颜色特征:通过分析图像中不同颜色区域的分布和比例,识别图像中的物体和场景。
2. 形状特征:通过分析图像中物体的形状、轮廓、边缘等信息,识别图像中的物体和场景。
3. 纹理特征:通过分析图像中物体的纹理信息,识别图像中的物体和场景。
4. 深度学习:通过构建深度神经网络,使计算机能够从大量数据中学习图像特征,提高识别准确率。
三、应用领域图像识别技术在各个领域都有广泛的应用,主要包括:1. 安全监控:通过图像识别技术,实时监控公共场合、交通要道等区域,提高安全防范能力。
2. 医学诊断:通过图像识别技术,分析医学影像,辅助医生进行疾病诊断。
3. 工业检测:通过图像识别技术,检测工业产品表面缺陷,提高产品质量。
4. 无人驾驶:通过图像识别技术,使无人驾驶汽车能够识别道路、行人、障碍物等,实现自动驾驶。
5. 人脸识别:通过图像识别技术,实现人脸识别,应用于门禁系统、考勤系统等。
四、未来发展趋势1. 更高的识别准确率:通过不断优化算法和模型,提高图像识别的准确率。
2. 更快的识别速度:通过提高计算速度和优化算法,实现实时图像识别。
3. 更广泛的应用领域:随着技术的不断发展,图像识别技术将应用于更多领域,如智能家居、虚拟现实等。
信息光学中的光学照相原理及系统应用

信息光学中的光学照相原理及系统应用1.简介信息光学是将光学与信息技术相结合的学科领域,其中光学照相是信息光学重要的应用之一。
本文将介绍光学照相的原理及在系统应用中的重要性。
2.光学照相原理光学照相利用光学系统将物体的光学信息转化为可记录的图像。
其原理可分为以下几个步骤:2.1 光的传播光线从物体上的各个点发出,经过透镜系统的聚焦作用,形成实像或虚像。
2.2 光的记录实像或虚像通过感光材料(如胶片或光敏电子元件)记录下来,以便后续处理。
2.3 光的转换感光材料上的记录转换为电信号或数字信号,以便进一步处理、存储和传输。
3.系统应用光学照相在信息光学中有广泛的系统应用,以下将介绍其中几个重要的应用领域。
3.1 数字摄影数字摄影是利用光学照相原理记录图像的一种方式,与传统胶片摄影相比,数字摄影具有快速、方便、高质量等优势。
现代数码相机已经成为人们记录生活、传递信息的主要工具之一。
3.2 光学显微镜光学显微镜是一种常见的光学照相系统应用。
它利用光学系统放大微观物体的图像,并通过照相方式记录下来。
显微镜的高分辨率和显微镜镜头的设计对于光学显微镜的成像质量至关重要。
3.3 光学雷达光学雷达是一种利用光学照相原理实现目标探测和跟踪的系统应用。
它通过高速瞬时光照相技术,实现对目标的快速、精确的成像和识别,适用于航空、导航、遥感等领域。
3.4 光学测量光学测量是光学照相在工程测量中的应用,包括三维形貌测量、位移测量、变形测量等。
通过光学系统的照相原理,可以实现精确、非接触的测量,具有广泛的应用前景。
4.总结光学照相作为信息光学中重要的应用领域,具有重要的意义和广泛的应用前景。
通过光的传播、记录和转换等步骤,实现对物体的图像记录和信息提取。
在数字摄影、光学显微镜、光学雷达和光学测量等领域发挥着重要的作用。
随着科技的进步和光学技术的发展,光学照相将继续为信息光学领域的发展做出贡献。
物理实验技术中的图像处理与识别方法

物理实验技术中的图像处理与识别方法近年来,随着计算机技术的快速发展,图像处理和识别方法在物理实验技术中得到了广泛应用。
图像处理和识别方法可以帮助科学家更好地分析实验数据,提取有效的信息,并进一步推动科学研究的进展。
下面将介绍几种常见的物理实验技术中的图像处理与识别方法。
一、数字图像处理数字图像处理是物理实验技术中最常见和基础的图像处理方法之一。
它通过对图像进行数字化处理,利用计算机算法提取目标中的有用信息。
在物理实验中,科学家常常需要对实验现象进行分析和测量,数字图像处理的方法可以帮助他们实现这一目的。
例如,在光学实验中,通过光电探测器和相机拍摄到实验结果后,可以通过数字图像处理技术,对光强度的分布、波长等特征进行分析。
通过对图像进行校正、滤波、边缘检测等处理,可以更准确地获得实验数据,并进行进一步的数值计算。
二、特征提取与模式识别在物理实验中,常常需要对实验数据进行特征提取和模式识别。
特征提取是指从原始数据中提取出具有代表性的特征,而模式识别是指根据这些特征来识别和分类不同的实验现象。
图像中常见的特征提取方法有边缘检测、纹理特征提取和颜色特征提取等。
通过这些特征提取方法,可以将原始的实验图像转化为具有代表性的特征向量,以便进一步进行模式识别。
模式识别方法多种多样,包括传统的模式匹配、统计学方法、人工神经网络和深度学习等。
科学家可以根据不同实验现象的特征选择适合的模式识别方法,以实现对实验数据的自动化处理和分析。
三、图像重建和增强图像重建和增强方法是物理实验技术中常用的图像处理方法之一。
它可以通过对原始图像进行修复和改进,使得实验结果更加清晰和可靠。
在物理实验中,由于实验环境的限制或仪器的性能问题,所获取的图像往往带有噪声或模糊。
图像重建和增强方法可以通过降噪、滤波、图像锐化等处理,提高图像的质量,并还原和增强出实验结果中的细节。
图像重建和增强方法有很多种,包括基于频域的滤波方法、基于小波变换的图像增强方法等。
图像识别幻灯片课件
描述物理模式自身所采用的方法。
花瓣宽度(cm)
• 模式类 w1、w2、w3分别表示Setosa (多刺的)、
Virginaca (单性的)和 Versicolor (杂色的)三种花。
训练过程
信息 获取
数据预 处理
特征提 取
和选择
分类器设计
分类决 策
输出结 果
图11.1 模式识别系统的基本构成
2. 常用的三种模式组合
(1) 模式矢量
• 1936年,Fisher论文提出判别式分析技术,通过 测量花瓣的宽度和长度识别三种不同类型的鸢 (yuan)尾属植物的花。
– Iris Setosa (多刺的) – Iris Virginaca (单性的) – Iris Versicolor (杂色的)
边界方程: d12(x) = d1(x)-d2(x) = 2.8x1+1.0x2-8.9 = 0
图11.5 美国Banker协会 的E-13B字体的字符 集和对应波形。
字符设计在97个字中以 便读取。每个字符 用含有精细磁性材 料的墨水印刷。
(设计者保证大的均值 分离和小的类分布 的一个示例)
(2) 相关匹配
• 受生物神经系统启发产生,大量使用非线性元素的计算 单元(神经元),类似大脑神经元的互联方式组织起来 。具有对一些特定问题的适应能力和并行处理能力。
• 20世纪40年代早期McCulloch和Pitts提出。 • 80年代Rumelhart、Hinton和Williams发展出“反向传播”
方式学习的德尔塔(delta)规则,为多层机器提供了一 种有效的训练方法。 • 结构:由许多互联的相同的节点(处理单元,PE)构成 。每个PE从“上游”的几个PE接受输入信号,产生一个 标量输出,传给“下游”的一组PE。
《图像识别课件》-深度学习视觉识别PPT教程

特征提取和特征融合是图像识别中的重要步骤,可以提高模型的鲁棒性和泛 化能力。本节将介绍这些技术的基本原理。
目标检测与定位:YOLO、 RCNN等算法
目标检测和定位是图像识别中的关键任务,有许多经典算法被应用于这些任 务。本节将介绍YOLO、RCNN等算法的原理和应用。
人脸识别:人脸检测与特征提 取
人脸识别是一个具有挑战性的任务,本节将介绍人脸检测和特征提取的基本 原理和一些流行的人脸识别方法。
图像分割:FCN、U-Net、Mask RCNN算法
图像分割是图像处理中的重要任务,本节将介绍FCN、U-Net、Mask RCNN等 算法在图像分割中的应用。
图像风格转换:Neural Style Transfer算法
训练模型的原理与方法:反向传播算法
反向传播算法是深度学习训练过程中的关键步骤,本节将详细介绍反向传播算法的原理和实现方法。
CNN网络的优化方法:Dropout、 Batch Norm
为了提高卷积神经网络的性能和泛化能力,有许多优化方法被提出,本节将 介绍一些常见的优化方法。
卷积神经网络的结构与模板匹 配
深度学习视觉识别广泛应用于许多领域,包括图像分类、场景识别、自动驾 驶等。本节将介绍这些应用的基本原理和实践案例。
深度学习视觉识别发展趋势: 多模态融合、无监督学习等
深度学习视觉识别仍在不断发展,本节将介绍一些未来的发展趋势,如多模 态融合、无监督学习等。
总结与展望:深度学习视觉识 别的重要性和应用前景
本教程对深度学习视觉识别进行了全面的介绍,总结了其重要性和应用前景。 欢迎大家在学习过程中提问和讨论。
深度学习在图像识别领域具有广泛的应用,包括图像分类、目标检测、人脸 识别、图像分割等。本节将介绍这些应用的基本原理和方法。
数字图像处理实验报告

数字图像处理实验报告图像处理课程的目标是培养学生的试验综合素质与能力。
使学生通过实践,理解相关理论学问,将各类学问信息进行新的组合,制造出新的方法和新的思路,提高学生的科学试验与实际动手操作能力[1]。
从影像科筛选有价值的图像,建成影像学数字化试验教育平台,系统运行正常;具备图像上传、图像管理、图像检索与扫瞄、试验报告提交、老师批阅等功能;能满意使用要求[2]。
1.试验内容设计思路1.1项目建设内容和方法数字图像处理的内容:完整的数字图像处理大体上分为图像信息的猎取,存储,传送,处理,输出,和显示几个方面。
数字图像信息的猎取主要是把一幅图像转换成适合输入计算机和数字设备的数字信号,包括摄取图像,光、电转换及数字化。
数字图像信息的存储,数字图像信息的突出特点是数据量巨大,为了解决海量存储问题,数字图像的存储主要研究图像压缩,图像格式及图像数据库技术。
数字图像信息的传送数字图像信息的传送可分为系统内部传送与远距离传送[4]数字图像信息处理包括图像变换,图像增加,图像复原,彩色与多光谱处理图像重建,小波变换,图像编码,形态学,目标表示与描述。
数字图像输出和显示,最终目的是为人和机器供应一幅便于解释和识别的图像,数字图像的输出和显示也是数字图像处理的重要内容之一。
1.2数字图像处理的方法大致可以分为两大类,既空域法和频域法空域法:是把图像看做平面中各个像素组成的集合,然后直接对一维和二维函数进行相应处理,依据新图像生成方法的不同,空域处理法可为点处理法,区处理法,叠代处理法,跟踪处理法,位移不变与位移可变处理法。
点处理法的优点,点处理的典型用途a)灰度处理b)图像二值处理点处理方法的优点a)可用LUT方法快速实现b)节省存储空间。
区处理法,邻域处理法。
它依据输入图像的小邻域的像素值,按某些函数得到输出像素。
区处理法主要用于图象平滑和图像的锐化。
叠代处理法:叠代就是反复进行某些处理运算,图像叠代处理也是如此,拉普拉斯算子或平滑处理的结果是物体轮廓,该图像轮廓边缘太宽或粗细不一,要经过多次叠代把它处理成单像素轮廓——图像细化。
《智能视觉技术及应用》课件第5章

第5章 图像预处理技术
1.图像表达 一幅2D图像可以用一个2D数组来表示,常将一幅2D图像 写成一个2D的 M ×N 矩阵(其中 M 和N 分别为图像像素的 总行数和总列数):
上式就是图像的矩阵表达形式,矩阵中的每个元素对应一个 像素。
第5章 图像预处理技术
2.图像显示 图像的显示和表达是密切相关的,图像显示是图像的可 视表达方式。对2D图像的显示可以采取多种形式,其基本思 路是将2D图像看作在2D空间中的一种幅度分布。根据图像 的不同,采取的显示方式也不同。对于二值图像,在每个空间 位置的取值只有两个,可用黑白来区分,也可用0和1来区分。
第5章 图像预处理技术
5.2 图像的表达、 显示与存储
5.2.1 图像的表达与显示 根据应用领域的不同,可以有多种不同的方法来表达和
表示图像,或将图像以一定的形式显示出来。图像表达是图 像显示的基础,而图像显示是机器视觉系统的重要模块之一。
第5章 图像预处理技术
要对图像进行表达和显示,需要对图像的各个单元进行 表达和显示。图像中的每个基本单元叫作图像元素,用 Picture表示图像时称为像素(PictureElement)。对于2D 图像, 英文里常用 Pixel代表像素。对于3D图像,英文里常用 Voxel 代表其基本单元,简称体素(VolumeElement)。
第5章 图像预处理技术
TIFF格式支持任意大小的图像,文件可分为:二值图像、 灰度图像、调色板彩色图像和全彩色图像四类。一个 TIFF 文件中可以存放多幅图像,也可存放多份调色板数据。
第5章 图像预处理技术
4.JPEG格式 JPEG 格式源自对静止灰度或彩色图像的一种压缩标准 JPEG,在使用有损压缩方式时可节省相当大的空间,目前数码 相机中均使用这种格式。JPEG 标准只是定义了一个规范 的编码数据流,并没有规定图像数据文件的格式。Cube Microsystems公司定义了一种JPEG 文件交换格式 (JPEGFileInterchangeFormat,JFIF),JFIF图像是一种使用灰度 来表示或使用 Y、Cb、Cr分量彩色表示的JPEG 图像,它包含 一个与JPEG 兼容的文件头。一个JFIF文件通常包含单个图 像,该图像可以是灰度的(其中的数据为单个分量),也可以 是彩色的(其中的数据是 Y、Cb、Cr分量)。
光学信息处理
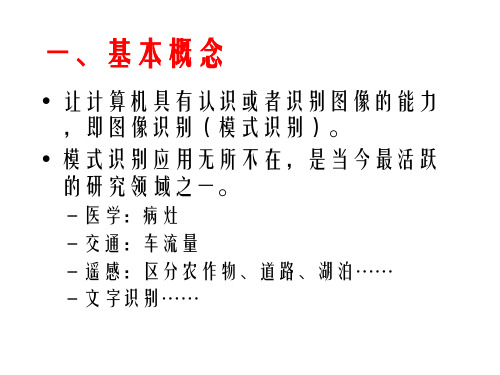
实验简介光学信息处理是用光学的方法实现对输入信息的各种变换或处理。
光学信息处理是近年来发展起来的一门新兴学科,它以全息术、光学传递函数和激光技术为基础。
透镜的傅里叶变换效应是光学信息处理的理论核心。
与其他形式的信息处理技术相比,光学信息处理具有高度并行性和大容量的特点。
这一学科发展很快,现在已经成为信息科学的一个重要分支,在许多领域进入了实用阶段。
光学信息处理的内容十分丰富。
本实验介绍两个基本的光学信息处理实验:图像相减和图像识别。
实验原理⏹原理图●原理图如下:上图为典型的光学信息处理系统示意图,S为对激光进行扩束的短焦距透镜,L0为使扩束后的激光束变为平行光的准直透镜。
(x1,y1)为物平面,L1为第一个傅里叶变换透镜,它从物面发出的衍射光并在后焦面(x,h)上形成物体的频谱。
(x,h)上可以放上各种空间滤波器以完成光学信息处理的任务。
L2为第二个傅里叶变换透镜,它的作用是对经处理后的物的频谱在进行一次傅里叶变换(相当于一次逆傅里叶变换只是坐标反转了)。
这样就可以得到经特殊处理的图像。
实验重点⏹相干光信息处理系统的主要特点。
⏹实验的技巧:光路调整和制作全息滤波器等。
实验难点⏹光信息处理实验对于光学元件、光路调整和环境要求很高,实验中必须非常细心。
在非实时的光学信息处理实验中,用全息法制作滤波器要用原位显影的方法。
自测题⏹相干光信息处理系统与非相干光信息处理系统的主要区别是什么?答案:照明光源不同。
相干光信息处理系统使用激光等单色性很好的光源,非相干光信息处理系统使用白光光源。
相干光信息处理系统处理的是光信号的复振幅,相干光信息处理系统处理的是光信号的强度。
⏹散斑图像相减实验中滤波用的狭缝的宽度如何计算?答案:狭缝的宽度杨氏条纹的暗纹宽度。
而暗纹的宽度,,为两次曝光时图像移动量。
⏹衍射光栅法是不是实时的光学信息处理系统?如果光学系统可以通过的图像的最大尺寸为D,则它可以对多大的图像进行相减?对这样的两个图进行相减时,要制作的正弦光栅的周期的大小?答案:是,D/2,设两个图案的中心距离为b<D/2,则正弦光栅的周期。
图像识别技术实验报告

图像识别技术实验报告一、实验目的通过本次实验,掌握图像识别技术的基本原理和应用方向,提升对图像处理领域的理解和应用能力。
二、实验内容1. 寻找合适的图像数据集2. 使用图像识别算法进行数据预处理3. 实施图像特征提取和分类4. 分析实验结果并撰写实验报告三、实验步骤1. 数据集选择:选择适合的图像数据集,如MNIST、CIFAR-10等经典数据集。
2. 数据预处理:对选定的数据集进行预处理,包括数据清洗、去噪等操作。
3. 图像特征提取:使用特征提取算法对图像进行特征提取,如SIFT、HOG等。
4. 图像分类:利用机器学习算法或深度学习模型对提取的特征进行分类。
5. 实验结果分析:评估分类准确率、召回率等指标,分析实验结果的优劣势。
四、实验结果经过实验,我们成功使用图像识别技术对数据集进行预处理,提取了有效的特征并实现了图像分类。
最终实验结果表明,我们的模型在准确率和召回率方面均取得了较好的表现。
五、结论与展望本次实验通过图像识别技术的应用,取得了一定的成果,展示了图像处理领域的潜力和前景。
未来可以进一步优化算法和模型,探索更多图像识别技术的可能性,推动图像处理领域的发展和应用。
六、参考文献1. Li, Jingjing, et al. "SIFT-based image retrieval: fast SIFT". ACM Sigmm Rec., vol. 31, issue 1, 2019, pp. 98-103.2. Dalal, Navneet, and Bill Triggs. "HOG Features for CGV-based human detection". Proceedings of the IEEE conference on computer vision and pattern recognition, 2005.七、致谢感谢指导老师的悉心指导和同学们的合作支持,使本次实验取得圆满成功。
图像识别技术解析PPT精品课件

的不连续点的集合,它描述了色彩函数的局
部突变。
2021/3/1
13
长期以来人们主要致力于灰度边缘的研 究并取得了很好的效果。但彩色边缘能 比灰度图像提供更多的信息。有研究表 明,彩色图像中,大约有90%的边缘与 灰度图像中的边缘相同,也就是说,有 10%的边缘在灰度图像中是检测不到的。 因此,彩色边缘的检测受到越来越多的 重视。
第4章 图像识别技术
4.1 引言 4.2 图像识别与解释 4.3 指纹识别技术
2021/3/1
1
4.1 引言
模式识别就是分析图像内容,找出图像中 有哪些东西。
步骤:
图像分割(物体分离):检测出各个物体, 并把它们的图像和其余景物分离
特征抽取:对物体进行度量。通过计算对物 体的一些重要特性进行量化表示
低难度,设计得更专用。
2021/3/1
7
水果的识别
四部分:
数码图片的获取,
图像的彩色边缘检测、图像的分割,
图象的颜色特征和形状特征提取
图像的分类识别。
选择研究的目标物
香蕉,西红柿,梨和青椒四种果蔬。
功能:
水果原始图像
使机器具有一定的视觉功能,能够认 识“记忆”中的水果。
例如:当接受到命令是"香蕉"时,就 可以自动地将"香蕉"拿出来。
图中H和S分量图看起来与V分量图很不相 同,这说明H,S,V三分量间的差别比R,G,B 间的大。
2021/3/1
11
(2)彩色边缘和彩色边缘检测
边缘是图像的一个基本特征,携带了图像 中的大量信息,边缘检测不仅能得到关于 边界的有用的结构信息,而且还能极大地 减少要处理的数据,很多图像处理和识别 算法都以边缘检测为重要基础。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
角度复用光信息存储与图像识别实验讲义及实验指导书(一)实验系统介绍一、实验概况近年来随着信息技术的高速发展,人们对存储器的存储容量和传输速率等性能的要求越来越高。
基于对大存储容量的要求,出现了海量存储技术,因而包括光盘存储在内的光信息存储技术相应而生。
但光盘存储虽然在海量信息存储方面有诸多优点,却只能在二维平面介质上存储信息,而二维存储正逐步接近其物理极限。
从平面扩展到三维体积的体全息存储技术同时具有存储容量大、数据传输速率高和信息寻址速度快的特点,因此体全息存储技术是可以满足目前人们对海量存储系统性能要求的首选方案,对其的研究也就具有十分重要的意义。
体全息存储的过程实质上是一个相干光两步成像的过程。
首先是在存储介质中记录物光和参考光干涉形成电场,然后用读出光(参考光或物光)去再现被记录的物光波前或参考光。
这与数据通信的过程相似,参考波的振幅和相位都被物光波所调制,参考波犹如载波;记录全息图就是把被调制了的载波记录下来。
在多重存储中,可以通过改变参考光束的角度,即改变参考光的空间频率,在记录介质的同一体积来(同一信道)记录多幅经过调制了的图像;也可以改变记录介质的位置(不同信道)来存储不同的图像。
当再现时,用相干光去照射全息图,就相当于对调制了的信号进行解调,于是又得到原来的物光波,从而看到物体的像。
并且,由体全息的角度和波长的选择性可知,利用不同角度入射或不同波长的光,可以在同一体积中记录许多不同的全息图;而且记录介质越厚,角度和波长的偏移量就越小,记录的全息图就越多,可以进行大容量存储。
本实验系统便于学生从实验现象中更形象地认识与了解信息光学,加深对全息尤其是体积全息基本概念和基本性质的理解,为今后更深入的学习奠定基础。
二、实验装置体全息存储系统主要由以下核心器件构成:(1)存储介质:体全息存储系统的存储容量、存取速度、存储数据的稳定性等基本存储性能在很大程度上都是由存储材料的性能决定的。
光折变晶体可以记录相位型体全息图,衍射效率大,目前大体积的光折变晶体制造技术已较为成熟,晶体的光学质量也很高,掺杂LiNbO3晶体也是当前使用最广泛的体全息存储材料。
本实验系统选用尺寸为1cm×1cm×0.5cm的片状Fe:LiNbO3晶体作为体全息存储器。
(2)激光器:采用固体激光器,输出波长为532nm,输出功率为50mW。
(3)空间光调制器(SLM):作为存储时原图像的输入及再现时图像模板的输入器件,其性能直接影响到再现图像的质量,国外生产的SLM性能相对较好,但价格昂贵。
在本实验中所使用的SLM的分辨率为1024×768,每个像素大小为26μm×26μm,其性能参数见表1。
·图1 体全息多重存储与图像再现的光路结构图图2 体全息多重存储与图像再现的实验装置图表1 空间光调制器的性能类型L扭曲向列相晶体材料的透过式激活矩阵TFT 空间分辨率 1024(H)×768(V)像素大小 26μm(H)×26μm(V)像素有效面积 23μm(H)×16μm(V)通道面积有效区域26.6mm(H)×20.0mm(V)透过率 600nm波段的透过率18%填充因子 54% 对比度>100:1类型 PCXGA 刷新 60Hz 线频率 48.4kHz 像素频率 65MHz三、图像存储及再现过程如图1所示,光束的传播方向为z方向。
激光器发出的光是波长为532nm的线偏振光,经过1/2波片HW1,HW1具有调节分光比的功能。
以偏振分光棱镜PBS的透射光作为物光,反射光为参考光。
参考光经过快门S1曝光后由反射镜M1反射到反射镜M2上,再经过4f系统到达存储晶体上。
其中,M2经由步进电机带动的电转平台控制转角来实现水平位置的角度复用,M2的旋转轴在4f系统的焦点上,如图2所示,4f系统由两个相同的傅立叶透镜构成。
这样只要M2在4f系统的物方孔径角范围内转动,其通过4f系统的出射光都会照射到晶体的同一点上。
图3 4f系统结构原理图透射光在经过快门S2后,被扩束器扩束准直后照明SLM加载图像信息,经过SLM的平行光经过凸透镜L聚焦后,经过一个1/2波片HW2,此1/2波片的作用是使物光的偏振方向与参考光束的偏振方向一致,即使参考光与物光成为两束相干光,在晶体内部发生干涉,形成与原图像信息相对应的体光栅结构,完成了一幅图像存储。
此时,计算机PC2在经过控制快门S1与S2曝光了计算所得的相应曝光时间后,命令其关闭,然后控制电转平台以一定步距角转动,同时通信PC1切换图像,在上述命令完成之后,PC2再次命令S1、S2曝光相应的时间,进行切换图像的存储,以此过程循环,最后实现在晶体同一体积内通过角度复用完成多重全息图的存储。
再现图像时,使电转平台控制M1旋转,恢复存储时各全息图所对应的参考光角度即可再现出所存图像,在实验中,我们存储了若干的二值化汉字图像,实验再现的图像如图4所示。
图4实验中存储与再现的部分全息图四、多重存储控制系统如图5所示,实验中采用PC机作为计算机平台,数量为两台:PC1运行图像显示软件,实现在接到PC2通信指令后,切换到下一幅需要存储的图像的功能;PC2用于完成对曝光与光束偏转系统控制的工作。
其中PC1与PC2以串口实现通信,以控制输入图像的显示。
本系统的所有软件均采用VisualC++6.0集成环境开发。
体全息多重存储的软件工作流程图如6所示。
图像显示控制图5 软件控制分工图图6 多重体全息存储控制软件流程五、光束偏转与快门的控制光束偏转与快门控制系统主要由ATtiny2313单片机控制,以MAX232形成的串口电路实现与PC机的通信,控制快门端以直流控制直流的固态继电器连接,曝光快门S1、S2的工作电压为3V直流电压,当固态继电器的控制端导通时,连接快门的一端将接入3V电压,曝光快门开启。
步进电机的控制由则电机驱动模块实现,步进电机带动电转平台旋转,其结构简图如图7所示。
图7 光束偏转与快门控制系统结构简图表2 RSA60电控旋转台的性能型号 RSA60传动比 90:1重复定位精度 <0.01°步进电机(1.8°) 42BYGH101最大静转矩 40Ncm额定工作电流 1.7A最大速度 50°/sec分辨率(8细分) 0.0025°中心最大负载 30Kg 自重 1Kg实验中所选择的步进电机驱动器型号为MA335B高性能细分步进驱动器(Micro step Driver),适合驱动中小型的任何3.5A相电流以下的两相或四相混合式步进电机。
其细分功能可使步进电机运转精度提高,振动减小,噪声降低。
电转平台的选择型号为RSA60电控旋转台,此系列的电控旋转台通过步进电机驱动,实现角度调整的自动化;采用精加工蜗轮蜗杆传动,角度调整无极限,并采用精密轴系设计,保证调整精度高,承载大。
标准接口,方便信号的传输。
其性能参数如表2所示。
图8 实验中的光束偏转与快门控制系统六、实验注意要点1.在进行实验前必须详细阅读实验指导书,清楚实验目的,理解实验原理,并重点熟悉各实验装置、操作方法和注意事项。
2.必须严格按照实验步骤进行操作,才能顺利完成实验。
3.严禁擅自拆卸实验仪器、设备的各组成部分,若实验中遇到故障应首先报告实验指导老师,由指导老师排除故障或做相应处理。
4.光学零件或组件的表面应保持清洁,不要用手随意触摸任何光学表面。
七、实验配置主体装置:本实验装置的主体由激光器、液晶光阀、光学再现系统、CCD图像采集与显示、光强探测组成,并配以相应的驱动电路和电源。
(二)实验指导书一、实验目的1、加深对光信息存储的理解。
2、掌握利用铌酸锂晶体进行体全息存储与图像识别的工作原理及方法。
二、实验原理在磁存储和传统的光盘存储中,一个信息位是由介质表面物理性质的改变,如消融和凹点或是磁畴的反转等来表示的。
而在体全息存储中的一个信息位分布在整个记录体中。
一整页的信息是以光学干涉图样的形式一次记录在厚的感光光学材料中的,此干涉图样是由两束相干激光束在存储材料中相遇而形成的三维光栅状全息图,我们称之为体积全息图。
通常两束光是由一束激光分离而成,一束称为物光,携带有欲存储的信息,另一束称为参考光,要求简单易于复制,一般采用传播中没有汇聚或发散的平面波。
体积全息图可分为透射和反射两种,其主要区别在于记录时物光和参考光的传播方向不同而造成体全息图内部干涉层面的不同趋向,从而使两者在再现特性上也有所区别,透射体全息图由物光与参考光在记录介质的同侧入射形成,再现时表现为较强的角度选择性;而反射体全息图是由物光和参考光从记录介质两侧相向入射形成,再现时表现为较强的波长选择性,由于本文中的实验系统所采用的是透射式全息存储,因此在以下的理论分析中主要由透射体全息图为例。
当物光与参考光在介质内相互作用时,便形成了三维光栅状全息图,即体全息图。
这种全息图的吸收系数和折射率是周期变化的,它对光的衍射作用如同三维光栅的衍射。
在用与存储时两束光中的任一束相同的光照射干涉光栅时,入射光与存储光栅产生衍射,就能正确地恢复出另一束波前,如图9(b)所示。
当全息图被存储在厚的材料中时,能否读出信息依赖于读出光束与记录时所用参考光的相似度。
读出光无论是在角度或者波长上如果同记录时所用的参考光有微小的差别,就可能导致欲读出的信息完全消失。
读出过程对这些微小变化的敏感性几乎随着材料厚度线性增加。
当用与存储时所用参考光相同的光束照射时,读出的全息图效率最高,随着读出光角度或波长的改变,全息图的效率逐渐下降,最后会变为零,其中使全息图的衍射效率为零的角度或波长的改变量同存储材料的厚度有关。
存储材料的厚度越厚,读出过程对角度或波长等的微小变化也越敏感,记录结构的可调性也就越高,稍微改变角度或波长就可以存储另一幅全息图,这样就可以利用对读出光波长或入射角度的敏感性在记录材料的同一体积内存储很多独立的全息图,从而显著增加有效存储密度提高存储容量。
这种技术称为波长和角度复用,另一种复用技术是相位复用,它是用不同的参考光的相位编码记录不同的全息图。
通过使用各种复用技术,可以增加存储密度,显著提高整体存储容量,这也是体全息存储区别于传统存储技术的优点之一。
图9(a) 体光栅的形成图9(b) 物光波与参考光波的再现当记录信息时,从PC机中输出的二维图案呈现在空间光调制器SLM(spatial light modulator)或液晶光阀上,一束激光穿过此空间调制单元,从而携带信息并在存储材料中与参考光发生干涉,所形成的干涉图样也就是全息相片。
利用复用技术可以在同一存储材料上存储另外的全息图,一个特定的参考光入射角度、波长或者相位编码对应一个全息图,以角度复用为例的体全息存储系统如图10所示。