Optimal path planning of
英语演讲(关于无人机的)

UAV development
• Task Allocation : Determining the optimal distribution of tasks amongst a group of agents, with time and equipment constraints
What Is a UAV
• The typical launch and recovery method of an unmanned aircraft is by the function of an automatic system or an operator on the ground.Historically, UAVs were simple remotely piloted aircraft, but autonomous control is increasingly bV
• Its flight is controlled either autonomously by onboard computers or by the remote control of a pilot on the ground or in another vehicle.
types
Global Hawk - UAV
X-47A & X-47B UCAS – UAV
X-43B – UCAV
Prowler II - UAS
UAV development
工业机器人中英文翻译、外文文献翻译、外文翻译
工业机器人中英文翻译、外文文献翻译、外文翻译外文原文:RobotAfter more than 40 years of development, since its first appearance till now, the robot has already been widely applied in every industrial fields, and it has become the important standard of industry modernization.Robotics is the comprehensive technologies that combine with mechanics, electronics, informatics and automatic control theory. The level of the robotic technology has already been regarded as the standard of weighing a national modern electronic-mechanical manufacturing technology.Over the past two decades, the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can perform certain basic more quickly and accurately than humans, they are being increasingly used in various manufacturing industries.With the maturation and broad application of net technology, the remote control technology of robot based on net becomes more and more popular in modern society. It employs the net resources in modern society which are already three to implement the operatio of robot over distance. It also creates many of new fields, such as remote experiment, remote surgery, and remote amusement. What's more, in industry, it can have a beneficial impact upon the conversion of manufacturing means.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements. The term “reprogrammable” implies two things: The robot operates according to a written program, and this program can be rewritten to accommodate a variety of manufacturing tasks. The term “multipurpose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Developed from actuating mechanism, industrial robot can imitation some actions and functions of human being, which can be used to moving all kinds of material components tools and so on, executing mission by execuatable program multifunctionmanipulator. It is extensive used in industry and agriculture production, astronavigation and military engineering.During the practical application of the industrial robot, the working efficiency and quality are important index of weighing the performance of the robot. It becomes key problems which need solving badly to raise the working efficiencies and reduce errors of industrial robot in operating actually. Time-optimal trajectory planning of robot is that optimize the path of robot according to performance guideline of minimum time of robot under all kinds of physical constraints, which can make the motion time of robot hand minimum between two points or along the special path. The purpose and practical meaning of this research lie enhance the work efficiency of robot.Due to its important role in theory and application, the motion planning of industrial robot has been given enough attention by researchers in the world. Many researchers have been investigated on the path planning for various objectives such as minimum time, minimum energy, and obstacle avoidance.The basic terminology of robotic systems is introduced in the following:A robot is a reprogrammable, multifunctional manipulator designed to move parts, materials, tools, or special devices through variable programmed motions for the performance of a variety of different task. This basic definition leads to other definitions, presented in the following paragraphs that give a complete picture of a robotic system.Preprogrammed locations are paths that the robot must follow to accomplish work. At some of these locations, the robot will stop and perform some operation, such as assembly of parts, spray painting, or welding. These preprogrammed locations are stored in the robot’s memory and are recalled later for continuous operation. Furthermore, these preprogrammed locations, as well as other programming feature, an industrial robot is very much like a computer, where data can be stored and later recalled and edited.The manipulator is the arm of the robot. It allows the robot to bend, reach, and twist. This movement is provided by the manipulator’s axes, also called the degrees of freedom of the robot. A robot can have from 3 to 16 axes. The term degrees of freedom will always relate to the number of axes found on a robot.The tooling and grippers are not part of the robotic system itself: rather, they areattachments that fit on the end of the robot’s arm. These attachments connected to the end of the robot’s arm allow the robot to lift parts, spot-weld, paint, arc-well, drill, deburr, and do a variety of tasks, depending on what is required of the robot.The robotic system can also control the work cell of the operating robot. The work cell of the robot is the total environment in which the robot must perform its task. Included within this cell may be the controller, the robot manipulator, a work table, safety features, or a conveyor. All the equipment that is required in order for the robot to do its job is included in the work cell. In addition, signals from outside devices can communicate with the robot in order to tell the robot when it should assemble parts, pick up parts, or unload parts to a conveyor.The robotic system has three basic components: the manipulator, the controller, and the power source.ManipulatorThe manipulator, which dose the physical work of the robotic system, consists of two sections: the mechanical section and the attached appendage. The manipulator also has a base to which the appendages are attached.The base of the manipulator is usually fixed to the floor of the work area. Sometimes, though, the base may be movable. In this case, the base is attached to either a rail or a track, allowing the manipulator to be moved from one location to anther.As mentioned previously, the appendage extends from the base of the robot. The appendage is the arm of the robot. It can be either a straight, movable arm or a jointed arm. The jointed arm is also known as an articulated arm.The appendages of the robot manipulator give the manipulator its various axes of motion. These axes are attached to a fixed base, which, in turn, is secured to a mounting. This mounting ensures that the manipulator will remain in one location.At the end of the arm, a wrist is connected. The wrist is made up of additional axes and a wrist flange. The wrist flange allows the robot user to connect different tooling to the wrist for different jobs.The manipulator’s axes allow it to perform work within a certain area. This area is called the work cell of the robot, and its size corresponds to the size of the manipulator. As the robot’s physical size increases, the size of the work cell must also increase.The movement of the manipulator is controlled by actuators, or drive system. The actuator, or drive system, allows the various axes to move within the work cell. The drive system can use electric, hydraulic, or pneumatic power. The energy developed by the drive system is converted to mechanical power by various mechanical drive systems. The drive systems are coupled through mechanical linkages. These linkages, in turn, drive the different axes of the robot. The mechanical linkages may be composed of chains, gears, and ball screws.ControllerThe controller in the robotic system is the heart of the operation. The controller stores preprogrammed information for later recall, controls peripheral devices, and communicates with computers within the plant for constant updates in production.The controller is used to control the robot manipulator’s movements as well as to control peripheral components within the work cell. The user can program the movements of the manipulator into the controller through the use of a hand-held teach pendant. This information is stored in the memory of the controller for later recall. The controller stores all program data for the robotic system. It can store several different programs, and any of these programs can be edited.The controller is also required to communicate with peripheral equipment within the work cell. For example, the controller has an input line that identifies when a machining operation is completed. When the machine cycle is completed, the input line turns on, telling the controller to position the manipulator so that it can pick up the finished part. Then, a new part is picked up by the manipulator and placed into the machine. Next, the controller signals the machine to start operation.The controller can be made from mechanically operated drums that step through a sequence of events. This type of controller operates with a very simple robotic system. The controllers found on the majority of robotic systems are more complex devices and represent state-of-the-art electronics. This is, they are microprocessor-operated. These microprocessors are either 8-bit, 16-bit, or 32-bit processors. This power allows the controller to the very flexible in its operation.The controller can send electric signals over communication lines that allow it to talk with the various axes of the manipulator. This two-way communication between therobot manipulator and the controller maintains a constant update of the location and the operation of the system. The controller also controls any tooling placed on the end of the robot’s wrist.The controller also has the job of communicating with the different plant computers. The communication link establishes the robot as part of a computer-assisted manufacturing (CAM) system.As the basic definition stated, the robot is a reprogrammable, multifunctional manipulator. Therefore, the controller must contain some type of memory storage. The microprocessor-based systems operate in conjunction with solid-state memory devices. These memory devices may be magnetic bubbles, random-access memory, floppy disks, or magnetic tape. Each memory storage device stores program information for later recall or for editing.Power supplyThe power supply is the unit that supplies power to the controller and the manipulator. Two types of power are delivered to the robotic system. One type of power is the AC power for operation of the controller. The other type of power is used for driving the various axes of the manipulator. For example, if the robot manipulator is controlled by hydraulic or pneumatic drives, control signals are sent to these devices, causing motion of the robot.For each robotic system, power is required to operate the manipulator. This power can be developed from either a hydraulic power source, a pneumatic power source, or an electric power source. These power sources are part of the total components of the robotic work cell.Classification of RobotsIndustrial robots vary widely in size, shape, number of axes, degrees of freedom, and design configuration. Each factor influences the dimensions of the robot’s working envelope or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as blew.Fixed and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are from point to point, and the cycle is repeated continuously. Thevariable-sequence robot can be programmed for a specific sequence of operations but can be reprogrammed to perform another sequence of operation.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servo-controlled by digital data, and its sequence of movements can be changed with relative ease.Intelligent Robot. The intellingent robot is capable of performing some of the functions and tasks carried out by human beings. It is equipped with a variety of sensors with visual and tactile capabilities.Robot ApplicationsThe robot is a very special type of production tool; as a result, the applications in which robots are used are quite broad. These applications can be grouped into three categories: material processing, material handling and assembly.In material processing, robots use to process the raw material. For example, the robot tools could include a drill and the robot would be able to perform drilling operations on raw material.Material handling consists of the loading, unloading, and transferring of workpieces in manufacturing facilities. These operations can be performed reliably and repeatedly with robots, thereby improving quality and reducing scrap losses.Assembly is another large application area for using robotics. An automatic assembly system can incorporate automatic testing, robot automation and mechanical handling for reducing labor costs, increasing output and eliminating manual handling concerns.Hydraulic SystemThere are only three basic methods of transmitting power: electrical, mechanical, and fluid power. Most applications actually use a combination of the three methods to obtain the most efficient overall system. To properly determine which principle method to use, it is important to know the salient features of each type. For example, fluidsystems can transmit power more economically over greater distances than can mechanical type. However, fluid systems are restricted to shorter distances than are electrical systems.Hydraulic power transmission systems are concerned with the generation, modulation, and control of pressure and flow, and in general such systems include:1.Pumps which convert available power from the prime mover to hydraulicpower at the actuator.2.Valves which control the direction of pump-flow, the level of powerproduced, and the amount of fluid-flow to the actuators. The power level isdetermined by controlling both the flow and pressure level.3.Actuators which convert hydraulic power to usable mechanical power outputat the point required.4.The medium, which is a liquid, provides rigid transmission and control aswell as lubrication of components, sealing in valves, and cooling of thesystem.5.Connectors which link the various system components, provide powerconductors for the fluid under pressure, and fluid flow return totank(reservoir).6.Fluid storage and conditioning equipment which ensure sufficient quality andquantity as well as cooling of the fluid..Hydraulic systems are used in industrial applications such as stamping presses, steel mills, and general manufacturing, agricultural machines, mining industry, aviation, space technology, deep-sea exploration, transportation, marine technology, and offshore gas and petroleum exploration. In short, very few people get through a day of their lives without somehow benefiting from the technology of hydraulics.The secret of hydraulic system’s success and widespread use is its versatility and manageability. Fluid power is not hindered by the geometry of the machine as is the case in mechanical systems. Also, power can be transmitted in almost limitless quantities because fluid systems are not so limited by the physical limitations of materials as are the electrical systems. For example, the performance of an electromagnet is limited by the saturation limit of steel. On the other hand, the powerlimit of fluid systems is limited only by the strength capacity of the material.Industry is going to depend more and more on automation in order to increase productivity. This includes remote and direct control of production operations, manufacturing processes, and materials handling. Fluid power is the muscle of automation because of advantages in the following four major categories.1.Ease and accuracy of control. By the use of simple levers and push buttons,the operator of a fluid power system can readily start, stop, speed up or slowdown, and position forces which provide any desired horsepower withtolerances as precise as one ten-thousandth of an inch. Fig. shows a fluidpower system which allows an aircraft pilot to raise and lower his landinggear. When the pilot moves a small control valve in one direction, oil underpressure flows to one end of the cylinder to lower the landing gear. To retractthe landing gear, the pilot moves the valve lever in the opposite direction,allowing oil to flow into the other end of the cylinder.2.Multiplication of force. A fluid power system (without using cumbersomegears, pulleys, and levers) can multiply forces simply and efficiently from afraction of an ounce to several hundred tons of output.3.Constant force or torque. Only fluid power systems are capable of providingconstant force or torque regardless of speed changes. This is accomplishedwhether the work output moves a few inches per hour, several hundred inchesper minute, a few revolutions per hour, or thousands of revolutions perminute.4.Simplicity, safety, economy. In general, fluid power systems use fewermoving parts than comparable mechanical or electrical systems. Thus, theyare simpler to maintain and operate. This, in turn, maximizes safety,compactness, and reliability. For example, a new power steering controldesigned has made all other kinds of power systems obsolete on manyoff-highway vehicles. The steering unit consists of a manually operateddirectional control valve and meter in a single body. Because the steering unitis fully fluid-linked, mechanical linkages, universal joints, bearings, reductiongears, etc. are eliminated. This provides a simple, compact system. Inapplications. This is important where limitations of control space require asmall steering wheel and it becomes necessary to reduce operator fatigue.Additional benefits of fluid power systems include instantly reversible motion, automatic protection against overloads, and infinitely variable speed control. Fluid power systems also have the highest horsepower per weight ratio of any known power source. In spite of all these highly desirable features of fluid power, it is not a panacea for all power transmission problems. Hydraulic systems also have some drawbacks. Hydraulic oils are messy, and leakage is impossible to completely eliminate. Also, most hydraulic oils can cause fires if an oil leak occurs in an area of hot equipment.Pneumatic SystemPneumatic system use pressurized gases to transmit and control power. As the name implies, pneumatic systems typically use air (rather than some other gas ) as the fluid medium because air is a safe, low-cost, and readily available fluid. It is particularly safe in environments where an electrical spark could ignite leaks from system components.In pneumatic systems, compressors are used to compress and supply the necessary quantities of air. Compressors are typically of the piston, vane or screw type. Basically a compressor increases the pressure of a gas by reducing its volume as described by the perfect gas laws. Pneumatic systems normally use a large centralized air compressor which is considered to be an infinite air source similar to an electrical system where you merely plug into an electrical outlet for electricity. In this way, pressurized air can be piped from one source to various locations throughout an entire industrial plant. The compressed air is piped to each circuit through an air filter to remove contaminants which might harm the closely fitting parts of pneumatic components such as valve and cylinders. The air then flows through a pressure regulator which reduces the pressure to the desired level for the particular circuit application. Because air is not a good lubricant (contains about 20% oxygen), pneumatics systems required a lubricator to inject a very fine mist of oil into the air discharging from the pressure regulator. This prevents wear of the closely fitting moving parts of pneumatic components.Free air from the atmosphere contains varying amounts of moisture. This moisture can be harmful in that it can wash away lubricants and thus cause excessive wear andcorrosion. Hence, in some applications, air driers are needed to remove this undesirable moisture. Since pneumatic systems exhaust directly into the atmosphere , they are capable of generating excessive noise. Therefore, mufflers are mounted on exhaust ports of air valves and actuators to reduce noise and prevent operating personnel from possible injury resulting not only from exposure to noise but also from high-speed airborne particles.There are several reasons for considering the use of pneumatic systems instead of hydraulic systems. Liquids exhibit greater inertia than do gases. Therefore, in hydraulic systems the weight of oil is a potential problem when accelerating and decelerating and decelerating actuators and when suddenly opening and closing valves. Due to Newton’s law of motion ( force equals mass multiplied by acceleration ), the force required to accelerate oil is many times greater than that required to accelerate an equal volume of air. Liquids also exhibit greater viscosity than do gases. This results in larger frictional pressure and power losses. Also, since hydraulic systems use a fluid foreign to the atmosphere , they require special reservoirs and no-leak system designs. Pneumatic systems use air which is exhausted directly back into the surrounding environment. Generally speaking, pneumatic systems are less expensive than hydraulic systems.However, because of the compressibility of air, it is impossible to obtain precise controlled actuator velocities with pneumatic systems. Also, precise positioning control is not obtainable. While pneumatic pressures are quite low due to compressor design limitations ( less than 250 psi ), hydraulic pressures can be as high as 10,000 psi. Thus, hydraulics can be high-power systems, whereas pneumatics are confined to low-power applications. Industrial applications of pneumatic systems are growing at a rapid pace. Typical examples include stamping, drilling, hoist, punching, clamping, assembling, riveting, materials handling, and logic controlling operations.工业机器人机器人自问世以来到现在,经过了40多年的发展,已被广泛应用于各个工业领域,已成为工业现代化的重要标志。
建筑机器人路径规划算法的发展现状及研究展望
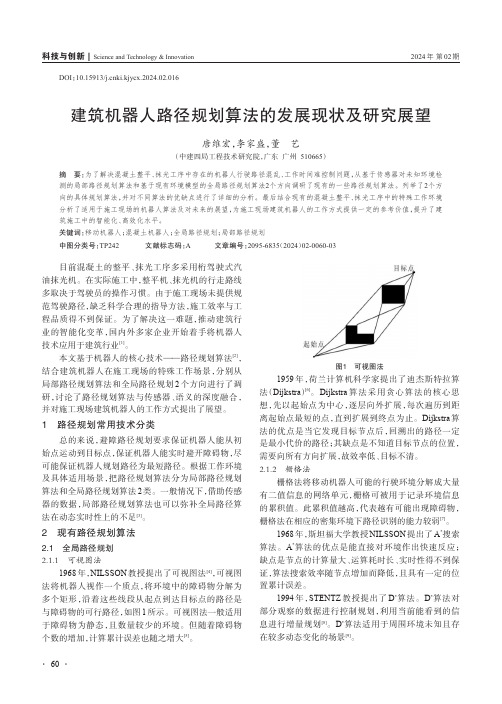
科技与创新|Science and Technology & Innovation2024年第02期DOI:10.15913/ki.kjycx.2024.02.016建筑机器人路径规划算法的发展现状及研究展望唐维宏,李家盛,董艺(中建四局工程技术研究院,广东广州510665)摘要:为了解决混凝土整平、抹光工序中存在的机器人行驶路径混乱、工作时间难控制问题,从基于传感器对未知环境检测的局部路径规划算法和基于现有环境模型的全局路径规划算法2个方向调研了现有的一些路径规划算法。
列举了2个方向的具体规划算法,并对不同算法的优缺点进行了详细的分析。
最后结合现有的混凝土整平、抹光工序中的特殊工作环境分析了适用于施工现场的机器人算法及对未来的展望,为施工现场建筑机器人的工作方式提供一定的参考价值,提升了建筑施工中的智能化、高效化水平。
关键词:移动机器人;混凝土机器人;全局路径规划;局部路径规划中图分类号:TP242 文献标志码:A 文章编号:2095-6835(2024)02-0060-03目前混凝土的整平、抹光工序多采用桁驾驶式汽油抹光机。
在实际施工中,整平机、抹光机的行走路线多取决于驾驶员的操作习惯。
由于施工现场未提供规范驾驶路径,缺乏科学合理的指导方法,施工效率与工程品质得不到保证。
为了解决这一难题,推动建筑行业的智能化变革,国内外多家企业开始着手将机器人技术应用于建筑行业[1]。
本文基于机器人的核心技术——路径规划算法[2],结合建筑机器人在施工现场的特殊工作场景,分别从局部路径规划算法和全局路径规划2个方向进行了调研,讨论了路径规划算法与传感器、语义的深度融合,并对施工现场建筑机器人的工作方式提出了展望。
1 路径规划常用技术分类总的来说,避障路径规划要求保证机器人能从初始点运动到目标点,保证机器人能实时避开障碍物,尽可能保证机器人规划路径为最短路径。
根据工作环境及具体适用场景,把路径规划算法分为局部路径规划算法和全局路径规划算法2类。
Optimal and efficient path planning for partially known environments

Optimal and Efficient Path Planning for Partially-Known EnvironmentsAnthony StentzThe Robotics Institute; Carnegie Mellon University; Pittsburgh, PA 15213AbstractThe task of planning trajectories for a mobile robot has received considerable attention in the research literature. Most of the work assumes the robot has a complete and accurate model of its environment before it begins to move; less attention has been paid to the problem of partially known environments. This situation occurs for an exploratory robot or one that must move to a goal location without the benefit of a floorplan or terrain map. Existing approaches plan an initial path based on known information and then modify the plan locally or replan the entire path as the robot discovers obstacles with its sensors, sacrificing optimality or computational efficiency respectively. This paper introduces a new algorithm, D*, capable of planning paths in unknown, partially known, and changing environments in an efficient, optimal, and complete manner.1.0IntroductionThe research literature has addressed extensively the motion planning problem for one or more robots moving through a field of obstacles to a goal. Most of this work assumes that the environment is completely known before the robot begins its traverse (see Latombe [4] for a good survey). The optimal algorithms in this literature search a state space (e.g., visibility graph, grid cells) using the dis-tance transform [2] or heuristics [8] to find the lowest cost path from the robot’s start state to the goal state. Cost can be defined to be distance travelled, energy expended, time exposed to danger, etc.Unfortunately, the robot may have partial or no information about the environment before it begins its traverse but is equipped with a sensor that is capable of measuring the environment as it moves. One approach to path planning in this scenario is to generate a “global”path using the known information and then attempt to “locally” circumvent obstacles on the route detected by the sensors [1]. If the route is completely obstructed, a new global path is planned. Lumelsky [7] initially assumes the environment to be devoid of obstacles and moves the robot directly toward the goal. If an obstacle obstructs the path, the robot moves around the perimeter until the point on the obstacle nearest the goal is found. The robot then proceeds to move directly toward the goal again. Pirzadeh [9] adopts a strategy whereby the robot wanders about the environment until it discovers the goal. The robot repeatedly moves to the adjacent location with lowest cost and increments the cost of a location each time it visits it to penalize later traverses of the same space. Korf [3] uses initial map information to estimate the cost to the goal for each state and efficiently updates it with backtracking costs as the robot moves through the environment.While these approaches are complete, they are also suboptimal in the sense that they do not generate the lowest cost path given the sensor information as it is acquired and assuming all known, a priori information is correct. It is possible to generate optimal behavior by computing an optimal path from the known map information, moving the robot along the path until either it reaches the goal or its sensors detect a discrepancy between the map and the environment, updating the map, and then replanning a new optimal path from the robot’s current location to the goal. Although this brute-force, replanning approach is optimal, it can be grossly inefficient, particularly in expansive environments where the goal is far away and little map information exists. Zelinsky [15] increases efficiency by using a quad-tree [13] to represent free and obstacle space, thus reducing the number of states to search in the planning space. For natural terrain, however, the map can encode robot traversability at each location ranging over a continuum, thus rendering quad-trees inappropriate or suboptimal.This paper presents a new algorithm for generating optimal paths for a robot operating with a sensor and a map of the environment. The map can be complete, empty, or contain partial information about the environment. ForIn Proceedings IEEE International Conference on Robotics and Automation, May 1994.regions of the environment that are unknown, the map may contain approximate information, stochastic models for occupancy, or even a heuristic estimates. The algorithm is functionally equivalent to the brute-force,optimal replanner, but it is far more efficient.The algorithm is formulated in terms of an optimal find-path problem within a directed graph, where the arcs are labelled with cost values that can range over a continuum. The robot’s sensor is able to measure arc costs in the vicinity of the robot, and the known and estimated arc values comprise the map. Thus, the algorithm can be used for any planning representation, including visibility graphs [5] and grid cell structures. The paper describes the algorithm, illustrates its operation, presents informal proofs of its soundness, optimality, and completeness, and then concludes with an empirical comparison of the algorithm to the optimal replanner.2.0The D* AlgorithmThe name of the algorithm, D*, was chosen because it resembles A* [8], except that it is dynamic in the sense that arc cost parameters can change during the problem-solving process. Provided that robot motion is properly coupled to the algorithm, D* generates optimal trajecto-ries. This section begins with the definitions and notation used in the algorithm, presents the D* algorithm, and closes with an illustration of its operation.2.1DefinitionsThe objective of a path planner is to move the robot from some location in the world to a goal location, such that it avoids all obstacles and minimizes a positive cost metric (e.g., length of the traverse). The problem space can be formulated as a set of states denoting robot loca-tions connected by directional arcs , each of which has an associated cost. The robot starts at a particular state and moves across arcs (incurring the cost of traversal) to other states until it reaches the goal state, denoted by . Every state except has a backpointer to a next state denoted by . D* uses backpointers to represent paths to the goal. The cost of traversing an arc from state to state is a positive number given by the arc cost function . If does not have an arc to , then is undefined. Two states and are neighbors in the space if or is defined.Like A*, D* maintains an list of states. The list is used to propagate information about changes to the arc cost function and to calculate path costs to states in the space. Every state has an associated tag ,such that if has never been on the list, if is currently on the list, andG X G Y b X ()Y =Y X c X Y ,()Y X c X Y ,()X Y c X Y ,()c Y X ,()OPEN OPEN X t X ()t X ()NEW =X OPEN t X ()OPEN =XOPEN if is no longer on the list. For each state , D* maintains an estimate of the sum of the arc costs from to given by the path cost function . Given the proper conditions, this estimate is equivalent to the optimal (minimal) cost from state to , given by the implicit function . For each state on the list (i.e.,), the key function,, is defined to be equal to the minimum of before modification and all values assumed by since was placed on the list. The key function classifies a state on the list into one of two types:a state if , and a state if . D* uses states on the listto propagate information about path cost increases (e.g.,due to an increased arc cost) and states to propagate information about path cost reductions (e.g.,due to a reduced arc cost or new path to the goal). The propagation takes place through the repeated removal of states from the list. Each time a state is removed from the list, it is expanded to pass cost changes to its neighbors. These neighbors are in turn placed on the list to continue the process.States on the list are sorted by their key function value. The parameter is defined to be for all such that . The parameter represents an important threshold in D*: path costs less than or equal to are optimal, and those greater than may not be optimal. The parameter is defined to be equal to prior to most recent removal of a state from the list. If no states have been removed,is undefined.An ordering of states denoted by is defined to be a sequence if for all such that and for all such that . Thus, a sequence defines a path of backpointers from to . A sequence is defined to be monotonic if( a n d) o r ( and ) for all such that . D* constructs and maintains a monotonic sequence , representing decreasing current or lower-bounded path costs, for each state that is or was on the list. Given a sequence of states , state is an ancestor of state if and a descendant of if .For all two-state functions involving the goal state, the following shorthand notation is used:.Likewise, for sequences the notation is used.The notation is used to refer to a function independent of its domain.t X ()CLOSED =X OPEN X X G h G X ,()X G o G X ,()X OPEN t X ()OPEN =k G X ,()h G X ,()h G X ,()X OPEN X OPEN RAISE k G X ,()h G X ,()<LOWER k G X ,()h G X ,()=RAISE OPEN LOWER OPEN OPEN OPEN k min min k X ()()X t X ()OPEN =k min k min k min k old k min OPEN k old X 1X N {,}b X i 1+()X i =i 1i ≤N <X i X j ≠i j (,)1i ≤j <N ≤X N X 1X 1X N {,}t X i ()CLOSED =h G X i ,()h G X i 1+,()<t X i ()OPEN =k G X i ,()h G X i 1+,()<i 1i ≤N <G X {,}X OPEN X 1X N {,}X i X j 1i j N ≤<≤X j 1j i N ≤<≤f X ()f G X ,()≡X {}G X {,}≡f °()2.2Algorithm DescriptionThe D* algorithm consists primarily of two functions: and .is used to compute optimal path costs to the goal, and is used to change the arc cost function and enter affected states on the list. Initially, is set to for all states,is set to zero, and is placed on the list. The first function,, is repeatedly called until the robot’s state,, is removed from the list (i.e.,) or a value of -1 is returned, at which point either the sequence has been computed or does not exist respectively. The robot then proceeds to follow the backpointers in the sequence until it eitherreaches the goal or discovers an error in the arc cost func-tion (e.g., due to a detected obstacle). The second function,, is immediately called to cor-rect and place affected states on the list. Let be the robot’s state at which it discovers an error in .By calling until it returns ,the cost changes are propagated to state such that . At this point, a possibly new sequence has been constructed, and the robot continues to follow the backpointers in the sequence toward the goal.T h e a l g o r i t h m s f o r a n d are presented below. The embedded routines are , which returns the state on the list with minimum value ( if the list is empty);, which returns for the list (-1 if the list is empty);, which deletes state from the list and sets ; and , w h i c h c o m p u t e s i f , if , and i f , s e t s and , and places or re-positions state on the list sorted by .In function at lines L1 through L3,the state with the lowest value is removed from the list. If is a state (i.e.,), its path cost is optimal since is equal to the old . At lines L8 through L13, each neighbor of is examined to see if its path cost can be lowered. Additionally,neighbor states that are receive an initial path cost value, and cost changes are propagated to each neighbor that has a backpointer to , regardless of whether the new cost is greater than or less than the old. Since these states are descendants of , any change to the path cost of affects their path costs as well. The backpointer of is redirected (if needed) so that the monotonic sequence is constructed. All neighbors that receive a new pathPROCESS STATE –MODIFY COST –PROCESS STATE –MODIFY COST –c °()OPEN t °()NEW h G ()G OPEN PROCESS STATE –X OPEN t X ()CLOSED =X {}X {}c °()MODIFY COST –c °()OPEN Y c °()PROCESS STATE –k min h Y ()≥Y h Y ()o Y ()=Y {}PROCESS STATE –MODIFY COST –MIN STATE –OPEN k °()NULL GET KMIN –k min OPEN DELETE X ()X OPEN t X ()CLOSED =INSERT X h new ,()k X ()h new =t X ()NEW =k X ()min k X ()h new ,()=t X ()OPEN =k X ()min h X ()h new ,()=t X ()CLOSED =h X ()h new =t X ()OPEN =X OPEN k °()PROCESS STATE –X k °()OPEN X LOWER k X ()h X ()=h X ()k min Y X NEW Y X X X Y Y {}cost are placed on the list, so that they will propagate the cost changes to their neighbors.If is a state, its path cost may not be optimal.Before propagates cost changes to its neighbors, its optimal neighbors are examined at lines L4 through L7 to see if can be reduced. At lines L15 through L18, cost changes are propagated to states and immediate descendants in the same way as for states. If is able to lower the path cost of a state that is not an immediate descendant (lines L20 and L21), is placed back on the list for future expansion. It is shown in the next section that this action is required to avoid creating a closed loop in the backpointers. If the path cost of is able to be reduced by a suboptimal neighbor (lines L23 through L25), the neighbor is placed back on the list. Thus, the update is “postponed” until the neighbor has an optimal path cost.Function: PROCESS-STATE ()L1L2if then return L3;L4if then L5for each neighbor of :L6if and then L7;L8if then L9for each neighbor of :L10if or L11( and ) or L12( and ) then L13;L14else L15for each neighbor of :L16if or L17( and ) then L18;L19else L20if and then L21L22else L23if and and L24 and then L25L26return OPEN X RAISE X h X ()NEW LOWER X X OPEN X OPEN X MIN STATE ()–=X NULL =1–k old GET KMIN –()=DELETE X ()k old h X ()<Y X h Y ()k old ≤h X ()h Y ()c Y X ,()+>b X ()Y =h X ()h Y ()c Y X ,()+=k old h X ()=Y X t Y ()NEW =b Y ()X =h Y ()h X ()c X Y ,()+≠b Y ()X ≠h Y ()h X ()c X Y ,()+>b Y ()X =INSERT Y h X ()c X Y ,()+,()Y X t Y ()NEW =b Y ()X =h Y ()h X ()c X Y ,()+≠b Y ()X =INSERT Y h X ()c X Y ,()+,()b Y ()X ≠h Y ()h X ()c X Y ,()+>INSERT X h X (),()b Y ()X ≠h X ()h Y ()c Y X ,()+>t Y ()CLOSED =h Y ()k old >INSERT Y h Y (),()GET KMIN ()–In function , the arc cost function is updated with the changed value. Since the path cost for state will change, is placed on the list. When is expanded via , it computes a new and places on the list.Additional state expansions propagate the cost to the descendants of .Function: MODIFY-COST (X, Y, cval)L1L2if then L3return 2.3Illustration of OperationThe role of and states is central to the operation of the algorithm. The states (i.e.,) propagate cost increases, and the states (i.e.,) propagate cost reductions. When the cost of traversing an arc is increased, an affected neighbor state is placed on the list, and the cost increase is propagated via states through all state sequences containing the arc. As the states come in contact with neighboring states of lower cost, these states are placed on the list, and they sub-sequently decrease the cost of previously raised states wherever possible. If the cost of traversing an arc isdecreased, the reduction is propagated via states through all state sequences containing the arc, as well as neighboring states whose cost can also be lowered.Figure 1: Backpointers Based on Initial PropagationFigure 1 through Figure 3 illustrate the operation of the algorithm for a “potential well” path planning problem.MODIFY COST –Y X OPEN X PROCESS STATE –h Y ()h X ()c X Y ,()+=Y OPEN Y c X Y ,()cval=t X ()CLOSED =INSERT X h X (),()GET KMIN ()–RAISE LOWER RAISE k X ()h X ()<LOWER k X ()h X ()=OPEN RAISE RAISE LOWER OPEN LOWER GThe planning space consists of a 50 x 50 grid of cells .Each cell represents a state and is connected to its eight neighbors via bidirectional arcs. The arc cost values are small for the cells and prohibitively large for the cells.1 The robot is point-sized and is equipped with a contact sensor. Figure 1 shows the results of an optimal path calculation from the goal to all states in the planning space. The two grey obstacles are stored in the map, but the black obstacle is not. The arrows depict the backpointer function; thus, an optimal path to the goal for any state can be obtained by tracing the arrows from the state to the goal. Note that the arrows deflect around the grey, known obstacles but pass through the black,unknown obstacle.Figure 2: LOWER States Sweep into WellThe robot starts at the center of the left wall and follows the backpointers toward the goal. When it reaches the unknown obstacle, it detects a discrepancy between the map and world, updates the map, colors the cell light grey, and enters the obstacle cell on the list.Backpointers are redirected to pull the robot up along the unknown obstacle and then back down. Figure 2illustrates the information propagation after the robot has discovered the well is sealed. The robot’s path is shown in black and the states on the list in grey.states move out of the well transmitting path cost increases. These states activate states around the1. The arc cost value of OBSTACLE must be chosen to be greater than the longest possible sequence of EMPTY cells so that a simple threshold can be used on the path cost to determine if the optimal path to the goal must pass through an obstacle.EMPTY OBSTACLE GLOWER statesRAISE statesLOWER statesOPEN OPEN RAISE LOWER“lip” of the well which sweep around the upper and lower obstacles and redirect the backpointers out of the well.Figure 3: Final Backpointer ConfigurationThis process is complete when the states reach the robot’s cell, at which point the robot moves around the lower obstacle to the goal (Figure 3). Note that after the traverse, the backpointers are only partially updated.Backpointers within the well point outward, but those in the left half of the planning space still point into the well.All states have a path to the goal, but optimal paths are computed to a limited number of states. This effect illustrates the efficiency of D*. The backpointer updates needed to guarantee an optimal path for the robot are limited to the vicinity of the obstacle.Figure 4 illustrates path planning in fractally generated terrain. The environment is 450 x 450 cells. Grey regions are fives times more difficult to traverse than white regions, and the black regions are untraversible. The black curve shows the robot’s path from the lower left corner to the upper right given a complete, a priori map of the environment. This path is referred to as omniscient optimal . Figure 5 shows path planning in the same terrain with an optimistic map (all white). The robot is equipped with a circular field of view with a 20-cell radius. The map is updated with sensor information as the robot moves and the discrepancies are entered on the list for processing by D*. Due to the lack of a priori map information, the robot drives below the large obstruction in the center and wanders into a deadend before backtracking around the last obstacle to the goal. The resultant path is roughly twice the cost of omniscientGLOWER OPEN optimal. This path is optimal, however, given the information the robot had when it acquired it.Figure 4: Path Planning with a Complete MapFigure 5: Path Planning with an Optimistic MapFigure 6 illustrates the same problem using coarse map information, created by averaging the arc costs in each square region. This map information is accurate enough to steer the robot to the correct side of the central obstruction, and the resultant path is only 6% greater incost than omniscient optimal.Figure 6: Path Planning with a Coarse-Resolution Map3.0Soundness, Optimality, andCompletenessAfter all states have been initialized to and has been entered onto the list, the function is repeatedly invoked to construct state sequences. The function is invoked to make changes to and to seed these changes on the list. D* exhibits the following properties:Property 1: If , then the sequence is constructed and is monotonic.Property 2: When the value returned by e q u a l s o r e x c e e d s , t h e n .Property 3: If a path from to exists, and the search space contains a finite number of states, will be c o n s t r u c t e d a f t e r a fi n i t e n u m b e r o f c a l l s t o . I f a p a t h d o e s n o t e x i s t , will return -1 with .Property 1 is a soundness property: once a state has been visited, a finite sequence of backpointers to the goal has been constructed. Property 2 is an optimality property.It defines the conditions under which the chain of backpointers to the goal is optimal. Property 3 is a completeness property: if a path from to exists, it will be constructed. If no path exists, it will be reported ina finite amount of time. All three properties holdX t X ()NEW =G OPEN PROCESS STATE –MODIFY COST –c °()OPEN t X ()NEW ≠X {}k min PROCESS STATE –h X ()h X ()o X ()=X G X {}PROCESS STATE –PROCESS STATE –t X ()NEW =X G regardless of the pattern of access for functions and .For brevity, the proofs for the above three properties are informal. See Stentz [14] for the detailed, formal p r o o f s. C o n s i d e r P r o p e r t y 1 fi r s t. W h e n e v e r visits a state, it assigns to point to an existing state sequence and sets to preserve monotonicity. Monotonic sequences are subsequently manipulated by modifying the functions ,,, and . When a state is placed on the list (i.e.,), is set to preserve monotonicity for states with backpointers to .Likewise, when a state is removed from the list, the values of its neighbors are increased if needed to preserve monotonicity. The backpointer of a state ,, can only be reassigned to if and if the sequence contains no states. Since contains no states, the value of every state in the sequence must be less than . Thus, cannot be an ancestor of , and a closed loop in the backpointers cannot be created.Therefore, once a state has been visited, the sequence has been constructed. Subsequent modifications ensure that a sequence still exists.Consider Property 2. Each time a state is inserted on or removed from the list, D* modifies values so that for each pair of states such that is and is . Thus, when is chosen for expansion (i.e.,), the neighbors of cannot reduce below , nor can the neighbors, since their values must be greater than . States placed on the list during the expansion of must have values greater than ; thus, increases or remains the same with each invocation of . If states with values less than or equal to are optimal, then states with values between (inclusively) and are optimal, since no states on the list can reduce their path costs. Thus, states with values less than or equal to are optimal. By induction,constructs optimal sequences to all reachable states. If the a r c c o s t i s m o d i fi e d , t h e f u n c t i o n places on the list, after which is less than or equal to . Since no state with can be affected by the modified arc cost, the property still holds.Consider Property 3. Each time a state is expanded via , it places its neighbors on the list. Thus, if the sequence exists, it will be constructed unless a state in the sequence,, is never selected for expansion. But once a state has been placedMODIFY COST –PROCESS STATE –PROCESS STATE –NEW b °()h °()t °()h °()k °()b °()X OPEN t X ()OPEN =k X ()h X ()X X h °()X b X ()Y h Y ()h X ()<Y {}RAISE Y {}RAISE h °()h Y ()X Y X X {}X {}OPEN h °()k X ()h Y ()c Y X ,()+≤X Y ,()X OPEN Y CLOSED X k min k X ()=CLOSED X h X ()k min OPEN h °()k min OPEN X k °()k X ()k min PROCESS STATE –h °()k old h °()k old k min OPEN h °()k min PROCESS STATE –c X Y ,()MODIFY COST –X OPEN k min h X ()Y h Y ()h X ()≤PROCESS STATE –NEW OPEN X {}Yon the list, its value cannot be increased.Thus, due to the monotonicity of , the state will eventually be selected for expansion.4.0Experimental ResultsD* was compared to the optimal replanner to verify its optimality and to determine its performance improve-ment. The optimal replanner initially plans a single path from the goal to the start state. The robot proceeds to fol-low the path until its sensor detects an error in the map.The robot updates the map, plans a new path from the goal to its current location, and repeats until the goal isreached. An optimistic heuristic function is used to focus the search, such that equals the “straight-line”cost of the path from to the robot’s location assuming all cells in the path are . The replanner repeatedly expands states on the list with the minimum value. Since is a lower bound on the actual cost from to the robot for all , the replanner is optimal [8].The two algorithms were compared on planning problems of varying size. Each environment was square,consisting of a start state in the center of the left wall and a goal state in center of the right wall. Each environment consisted of a mix of map obstacles (i.e., available to robot before traverse) and unknown obstacles measurable b y t h e r o b o t ’s s e n s o r. T h e s e n s o r u s e d w a s omnidirectional with a 10-cell radial field of view. Figure 7 shows an environment model with 100,000 states. The map obstacles are shown in grey and the unknown obstacles in black.Table 1 shows the results of the comparison for environments of size 1000 through 1,000,000 cells. The runtimes in CPU time for a Sun Microsystems SPARC-10processor are listed along with the speed-up factor of D*over the optimal replanner. For both algorithms, the reported runtime is the total CPU time for all replanning needed to move the robot from the start state to the goal state, after the initial path has been planned. For each environment size, the two algorithms were compared on five randomly-generated environments, and the runtimes were averaged. The speed-up factors for each environment size were computed by averaging the speed-up factors for the five trials.The runtime for each algorithm is highly dependent on the complexity of the environment, including the number,size, and placement of the obstacles, and the ratio of map to unknown obstacles. The results indicate that as the environment increases in size, the performance of D*over the optimal replanner increases rapidly. The intuitionOPEN k °()k min Y gˆX ()gˆX ()X EMPTY OPEN gˆX ()h X ()+g ˆX ()X X for this result is that D* replans locally when it detects an unknown obstacle, but the optimal replanner generates a new global trajectory. As the environment increases in size, the local trajectories remain constant in complexity,but the global trajectories increase in complexity.Figure 7: Typical Environment for Algorithm ComparisonTable 1: Comparison of D* to Optimal Replanner5.0Conclusions5.1SummaryThis paper presents D*, a provably optimal and effi-cient path planning algorithm for sensor-equipped robots.The algorithm can handle the full spectrum of a priori map information, ranging from complete and accurate map information to the absence of map information. D* is a very general algorithm and can be applied to problems in artificial intelligence other than robot motion planning. In its most general form, D* can handle any path cost opti-mization problem where the cost parameters change dur-ing the search for the solution. D* is most efficient when these changes are detected near the current starting point in the search space, which is the case with a robot equipped with an on-board sensor.Algorithm 1,00010,000100,0001,000,000Replanner 427 msec 14.45 sec 10.86 min 50.82 min D*261 msec 1.69 sec 10.93 sec 16.83 sec Speed-Up1.6710.1456.30229.30See Stentz [14] for an extensive description of related applications for D*, including planning with robot shape,field of view considerations, dead-reckoning error,changing environments, occupancy maps, potential fields,natural terrain, multiple goals, and multiple robots.5.2Future WorkFor unknown or partially-known terrains, recentresearch has addressed the exploration and map building problems [6][9][10][11][15] in addition to the path finding problem. Using a strategy of raising costs for previously visited states, D* can be extended to support exploration tasks.Quad trees have limited use in environments with cost values ranging over a continuum, unless the environment includes large regions with constant traversability costs.Future work will incorporate the quad tree representation for these environments as well as those with binary cost values (e.g., and ) in order to reduce memory requirements [15].Work is underway to integrate D* with an off-road obstacle avoidance system [12] on an outdoor mobile robot. To date, the combined system has demonstrated the ability to find the goal after driving several hundred meters in a cluttered environment with no initial map.AcknowledgmentsThis research was sponsored by ARPA, under contracts “Perception for Outdoor Navigation” (contract number DACA76-89-C-0014, monitored by the US Army TEC)and “Unmanned Ground Vehicle System” (contract num-ber DAAE07-90-C-R059, monitored by TACOM).The author thanks Alonzo Kelly and Paul Keller for graphics software and ideas for generating fractal terrain.References[1] Goto, Y ., Stentz, A., “Mobile Robot Navigation: The CMU System,” IEEE Expert, V ol. 2, No. 4, Winter, 1987.[2] Jarvis, R. A., “Collision-Free Trajectory Planning Using the Distance Transforms,” Mechanical Engineering Trans. of the Institution of Engineers, Australia, V ol. ME10, No. 3, Septem-ber, 1985.[3] Korf, R. E., “Real-Time Heuristic Search: First Results,”Proc. Sixth National Conference on Artificial Intelligence, July,1987.[4] Latombe, J.-C., “Robot Motion Planning”, Kluwer Aca-demic Publishers, 1991.[5] Lozano-Perez, T., “Spatial Planning: A Configuration Space Approach”, IEEE Transactions on Computers, V ol. C-32, No. 2,February, 1983.OBSTACLE EMPTY [6] Lumelsky, V . J., Mukhopadhyay, S., Sun, K., “Dynamic Path Planning in Sensor-Based Terrain Acquisition”, IEEE Transac-tions on Robotics and Automation, V ol. 6, No. 4, August, 1990.[7] Lumelsky, V . J., Stepanov, A. A., “Dynamic Path Planning for a Mobile Automaton with Limited Information on the Envi-ronment”, IEEE Transactions on Automatic Control, V ol. AC-31, No. 11, November, 1986.[8] Nilsson, N. J., “Principles of Artificial Intelligence”, Tioga Publishing Company, 1980.[9] Pirzadeh, A., Snyder, W., “A Unified Solution to Coverage and Search in Explored and Unexplored Terrains Using Indirect Control”, Proc. of the IEEE International Conference on Robot-ics and Automation, May, 1990.[10] Rao, N. S. V ., “An Algorithmic Framework for Navigation in Unknown Terrains”, IEEE Computer, June, 1989.[11] Rao, N.S.V ., Stoltzfus, N., Iyengar, S. S., “A ‘Retraction’Method for Learned Navigation in Unknown Terrains for a Cir-cular Robot,” IEEE Transactions on Robotics and Automation,V ol. 7, No. 5, October, 1991.[12] Rosenblatt, J. K., Langer, D., Hebert, M., “An Integrated System for Autonomous Off-Road Navigation,” Proc. of the IEEE International Conference on Robotics and Automation,May, 1994.[13] Samet, H., “An Overview of Quadtrees, Octrees andRelated Hierarchical Data Structures,” in NATO ASI Series, V ol.F40, Theoretical Foundations of Computer Graphics, Berlin:Springer-Verlag, 1988.[14] Stentz, A., “Optimal and Efficient Path Planning for Unknown and Dynamic Environments,” Carnegie MellonRobotics Institute Technical Report CMU-RI-TR-93-20, August,1993.[15] Zelinsky, A., “A Mobile Robot Exploration Algorithm”,IEEE Transactions on Robotics and Automation, V ol. 8, No. 6,December, 1992.。
英文资讯:平衡可再生能源的成本
Increasing reliance on renewable energies is the way to achieve greater CO2 emission1 sustainability and energy independence. As such energies are yet only available intermittently2 and energy cannot be stored easily, most countries aim tocombine several energy sources. In a new study in EPJ Plus, French scientists have come up with an open source simulation method to calculate the actual cost of relying on a combination of electricity sources. Bernard Bonin from the Atomic Energy Research Centre CEA Saclay, France, and colleagues demonstrate that cost is not directly proportional to the demand level. Although recognised as crude by its creator, this method can be tailored to account for the public's interest-and not solely3 economic performance-when optimising the energy mix. The authors consider wind, solar, hydraulic4, nuclear, coal and gas as potential energy sources. In their model, the energy demand and availability are cast as random5 variables. The authors simulated the behaviour of the mix for a large number of tests of such variables, using so-called Monte-Carlo simulations.For a given mix, they found the energy cost of the mix presents a minimum as a function of the installed power. This means that if it is too large, the fixed6 costs dominate the total and become overwhelming. In contrast, if it is too small, expensive energy sources need to be frequently solicited7.The authors are also able to optimise the energy mix, according to three selected criteria8, namely economy, environment and supply security.The simulation tested on the case of France, based on 2011 data, shows that an optimal9 mix is 2.4 times the average demand in this territory. This mix contains a large amount of nuclear power, and a small amount of fluctuating energies: wind and solar. It is also strongly export-oriented.英语学习方法:1 emissionn.发出物,散发物;发出,散发参考例句:Rigorous measures will be taken to reduce the total pollutant emission.采取严格有力措施,降低污染物排放总量。
基于改进的RRT^()-connect算法机械臂路径规划
随着时代的飞速发展,高度自主化的机器人在人类社会中的地位与作用越来越大。
而机械臂作为机器人的一个最主要操作部件,其运动规划问题,例如准确抓取物体,在运动中躲避障碍物等,是现在研究的热点,对其运动规划的不断深入研究是非常必要的。
机械臂的运动规划主要在高维空间中进行。
RRT (Rapidly-exploring Random Tree)算法[1]基于随机采样的规划方式,无需对构型空间的障碍物进行精确描述,同时不需要预处理,因此在高维空间被广为使用。
近些年人们对于RRT算法的研究很多,2000年Kuffner等提出RRT-connect算法[2],通过在起点与终点同时生成两棵随机树,加快了算法的收敛速度,但存在搜索路径步长较长的情况。
2002年Bruce等提出了ERRT(Extend RRT)算法[3]。
2006年Ferguson等提出DRRT (Dynamic RRT)算法[4]。
2011年Karaman和Frazzoli提出改进的RRT*算法[5],在继承传统RRT算法概率完备性的基础上,同时具备了渐进最优性,保证路径较优,但是会增加搜索时间。
2012年Islam等提出快速收敛的RRT*-smart算法[6],利用智能采样和路径优化来迫近最优解,但是路径采样点较少,使得路径棱角较大,不利于实际运用。
2013年Jordan等通过将RRT*算法进行双向搜索,提出B-RRT*算法[7],加快了搜索速度。
同年Salzman等提出在下界树LBT-RRT中连续插值的渐进优化算法[8]。
2015年Qureshi等提出在B-RRT*算法中插入智能函数提高搜索速度的IB-RRT*算法[9]。
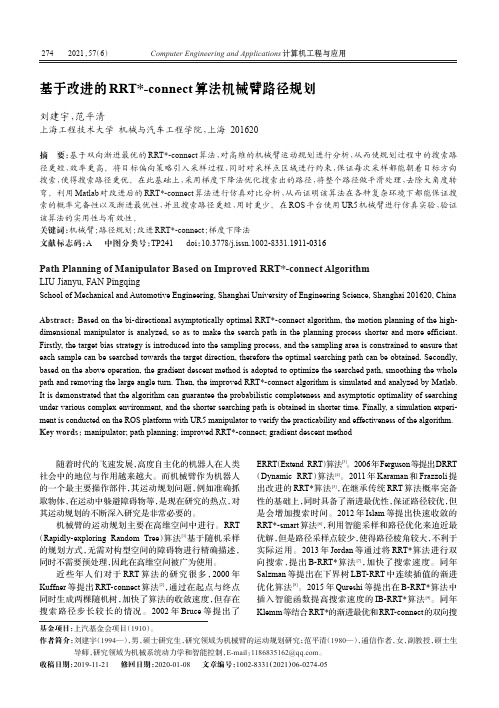
同年Klemm等结合RRT*的渐进最优和RRT-connect的双向搜基于改进的RRT*-connect算法机械臂路径规划刘建宇,范平清上海工程技术大学机械与汽车工程学院,上海201620摘要:基于双向渐进最优的RRT*-connect算法,对高维的机械臂运动规划进行分析,从而使规划过程中的搜索路径更短,效率更高。
工业机器人外文参考文献
工业机器人外文参考文献工业机器人外文参考文献1. Gao, Y., & Chen, J. (2018). Review of industrial robots for advanced manufacturing systems. Journal of Manufacturing Systems, 48, 144-156.2. Karaman, M., & Frazzoli, E. (2011). Sampling-based algorithms for optimal motion planning. The International Journal of Robotics Research, 30(7), 846-894.3. Khatib, O. (1986). Real-time obstacle avoidance for manipulators and mobile robots. The International Journal of Robotics Research, 5(1), 90-98.4. Lee, J. H., & Kim, E. B. (2019). Energy-efficient path planning for industrial robots considering joint dynamics. Journal of Mechanical Science and Technology, 33(3),1343-1351.5. Li, D., Li, Y., Wang, X., & Li, H. (2019). Design and implementation of a humanoid robot with flexible manipulators. Robotica, 37(12), 2008-2025.6. Liu, Y., Ren, X., & Wang, T. (2019). A novel adaptive fuzzy sliding mode control for a nonholonomic mobile robot. Soft Computing, 23(3), 1197-1209.7. Loh, A. P., & Tan, K. K. (2014). Vision-based controlof industrial robots using an adaptive neural network. Robotics and Computer-Integrated Manufacturing, 30(2), 177-184.8. Niemeyer, G., & Slotine, J. J. (1990). Stable adaptive teleoperation. The International Journal of Robotics Research, 9(1), 85-98.9. Park, J. Y., & Cho, C. H. (2018). Optimal path planning for industrial robots using a hybrid genetic algorithm. International Journal of Precision Engineering and Manufacturing, 19(5), 755-761.10. Wang, Z., Wang, X., & Liu, Y. (2019). Design and analysis of a novel humanoid robot with intelligent control. International Journal of Advanced Manufacturing Technology, 102(5-8), 1391-1403.。
田作业机械路径优化方法
田作业机械路径优化方法孟志军;刘卉;王华;付卫强【摘要】提出了一种面向农田作业机械的地块全区域覆盖路径优化方法.基于农田地块几何形状、作业机具参数、地头转弯模式等先验信息,将田间作业划分为不同区域,根据选择不同的路径优化目标:转弯数最少、作业消耗最小、总作业路径最短或有效作业路径比最大,计算出最优作业方向,生成最优作业路径.基于地块全区域覆盖路径优化算法,设计开发了农田作业机械的路径规划软件,并选取了4块典型的凸四边形农田地块进行作业路径规划测试.测试结果表明,最优作业方向上的路径优化目标量比其他作业方向上有显著减少;对于上述4个地块,按照不同优化目标计算所得的最优作业方向均与地块某个边的方向角相同,对于长宽比较大的地块,最长边方向通常为最优作业方向.%A kind of optimal path planning method for complete field coverage in agricultural machinery farming was described. The given convex field was decomposed into sub regions according to typical faming pattern of complete field coverage. Optimal path planning should minimize agricultural machines turns, farming time, route distance or other optimization object. According to the different purpose of path planning above, optimal travel direction could be determined based on topological features of arable lands, turns pattern in the headland and other useful information. Fanning path planning software was developed by using this algorithm. The test results from four actual quadrangular fields showed that the optimization object for field operation in optimal travel direction decreased obviously compared with other directions. Each optimal travel direction in those quadrangular fields above was along anyedge-Especially for a quadrangle having a larger edge ratio, the optimal travel direction was almost the longest edge.【期刊名称】《农业机械学报》【年(卷),期】2012(043)006【总页数】6页(P147-152)【关键词】农田作业机械;路径优化;全区域覆盖【作者】孟志军;刘卉;王华;付卫强【作者单位】国家农业信息化工程技术研究中心,北京100097;首都师范大学信息工程学院,北京100048;首都师范大学信息工程学院,北京100048;国家农业信息化工程技术研究中心,北京100097【正文语种】中文【中图分类】S232引言农田作业机械的田间作业路径,一般由操作人员根据习惯、经验和常识性规则进行选择,也有学者提出了一些路径设计方法。
具有修正策略的改进NSGA-Ⅱ三维路径规划

300机械设计与制造Machinery Design&Manufacture第5期2021年5月具有修正策略的改进NSGA-II三维路径规划封建湖1,郑宝娟1,封硕2,张婷宇1(1.长安大学理学院,陕西西安710064;.长安大学工程机械学院,陕西西安710064)摘要:针对传统多目标遗传算法存在收敛速度慢和难以得到Pareto最优解的缺点,提出了一种在三维环境下具有修正策略的改进带精英策略的非支配排序的遗传算法(NSGA-II)o首先建立能使路径最短、能耗最小、起伏最少的多目标函数;其次加入修正算子来减少冗余的路径点,实现快速收敛;然后在选择算子中加入辅助决策算子来比较优先级,提高解的多样性。
为了测试改进算法的效果,将传统算法与改进算法进行对比,改进算法得到的解更优且在不同环境下具有多个Pareto前沿分布解,其中修正算子使迭代次数减少了约63%,验证了改进算法的可行性和有效性。
关键词:三维路径规划;改进NSGA-II;修正算子;Pareto解中图分类号:TH16;TP242.6文献标识码:A文章编号:1001-3997(2021)05-0300-05The Three-Dimensional Path Planning Based on anImproved NSGA2-II with Modified StrategyFENG Jian-hu1,ZHENG Bao-juan1,FENG Shuo2,ZHANG Ting-yu1(1.School of Sciences,Chang'an University,Shaanxi Xi'an710064,China;2.School of Construction Machinery,Chang'an University,Shaanxi Xi'an710064,China)Abstract:In view of the shortcomings of convergence speed and difficult to get Pareto's optimal solution,an improved NSGA-II with a modified strategy is proposed to plan the optimal collision-free path for a mobile robot in three-dimensional environment.Firstly,the optimization targets involving the shortest path,minimum energy consumption and least fluctuation were determined.Secondly,a modified operator was added to reduce redundant path points to achieve fast convergence. Meanwhile,an auxiliary decision operator was added to the selection operator to compare the priorities and reinforce the diversity ofsolutions.The traditional algorithm compares with the improved algorithm in order to verify the effectiveness ofthe improved algorithm,using improved NAGA-II not only obtains a more satisfactory Pareto solution,but also get better diversity ofsolutions in Pareto optimalfront in different cases,t he modified operator reduces the number qfiterations by about 63%,which verify that the improved algorithm owns betterfeasibility and effectiveness.Key Words:Three-Dimensional Path Planning;Improved NSGA-II;Modified Operator;Pareto Solution1引言路径规划是机器人定位与导航领域研究的热点问题之一,目前的路径规划方法如蚁群算法,粒子群算法,蜂群算法,萤火虫算法及混合算法等|1-3]多用于二维平面空间规划。
大学英文成绩单中课程名称英文对照参考大全

大学课程名称翻译参考大全BASIC 语言及应用BASIC Language & ApplicationC 语言C LanguageC与UNIX环境C Language & Unix EnvironmentC语言与生物医学信息处理C Language & Biomedical Information Processing dBASE Ⅲ课程设计C ourse Exercise in dBASE ⅢFORTRAN语言FORTRAN LanguageIBM-PC/XT Fundamentals of Microcomputer IBM-PC/XT IBM-PC微机原理Fundamentals of Microcomputer IBM-PC半导体材料Semiconductor Materials半导体测量Measurement of Semiconductors半导体瓷敏元件Semiconductor Porcelain-Sensitive Elements半导体光电子学Semiconductor Optic Electronics 半导体化学Semiconductor Chemistry半导体激光器Semiconductor Laser Unit报刊编辑学Newspaper & Magazine Editing报纸编辑学Newspaper Editing泵与风机Pumps and Fans泵与水机Pumps & Water Turbines毕业设计Graduation Thesis编译方法Methods of Compiling材料的力学性能测试Measurement of Material Mechanical Performance 材料力学Mechanics of Materials财务成本管理Financial Cost Management财政学Public Finance财政与金融Finance & Banking财政与信贷Finance & Credit场论Field Theory常微分方程Ordinary Differentical Equations超导磁体及应用Superconductive Magnet & Application超导及应用Superconductive & Application超精微细加工Super-Precision & Minuteness Processing城市规划原理Fundamentals of City Planning传感器原理及应用Fundamentals of Sensors & Application 传热学Heat Transfer传坳概论Introduction to Pass Col船舶操纵Ship Controling船舶电力系统Ship Electrical Power System船舶电力系统课程设计Course Exercise in Ship Electrical Power System船舶结构与制图Ship Structure & Graphing船舶静力学Ship Statics船舶强度与结构设计Designing Ship Intensity & Structure船舶设计原理Principles of Ship Designing船舶推进Ship Propeling船舶摇摆Ship Swaying磁记录技术Magnetographic Technology磁记录物理Magnetographic Physics磁路设计与场计算Magnetic Path Designing & Magnetic Field Calculati磁盘控制器Magnetic Disk Controler 磁性材料Magnetic Materials磁性测量Magnetic Measurement大学俄语College Russian大学法语College French大学日语College Japanese大学英语College English大学语文College Chinese大众传播学Mass Media当代戏剧与电影Contemporary Drama & Films 党史History of the Party导波光学Wave Guiding Optics等离子体工程Plasma Engineering低频电子线路Low Frequency Electric Circuit 低温传热学Cryo Conduction低温物理导论Cryo Physic Concepts低温物理概论Cryo Physic Concepts低温物理概念Cryo Physic Concepts低温仪表及测试Cryo Meters & Measurement低温原理Cryo Fundamentals低温中的微机应用Application of Microcomputer in Cryo Technology电磁测量实验技术Electromagnetic Measurement Experiment & Technology 电磁场计算机Electromagnetic Field Computers电磁场理论Theory of Electromagnetic Fields电磁场数值计算Numerical Calculation of Electromagnetic Fields电磁场与电磁波Electromagnetic Fields & Magnetic Waves电磁场与微波技术Electromagnetic Fields & Micro-Wave Technology电工电子学Electronics in Electrical Engineering电工基础Fundamental Theory of Electrical Engineering电工基础理论Fundamental Theory of Electrical Engineering电工基础实验Basic Experiment in Electrical Engineering电工技术Electrotechnics电工技术基础Fundamentals of Electrotechnics电机测试技术Motor Measuring Technology电机电磁场的分析与计算Analysis & Calculation of Electrical Motor & Electromagnetic Fields 电机电器与供电Motor Elements and Power Supply电机课程设计Course Exercise in Electric Engine电机绕组理论Theory of Motor Winding电机绕组理论及应用Theory & Application of Motor Winding电介质物理Dielectric Physics电镜Electronic Speculum电力电子电路Power Electronic Circuit电力电子电器Power Electronic Equipment电力电子器件Power Electronic Devices电力电子学Power Electronics电力系统规划Power System Planning电力系统过电压Hyper-Voltage of Power Systems电力系统继电保护原理Power System Relay Protection电力系统经济分析Economical Analysis of Power Systems电力系统经济运行Economical Operation of Power Systems电力系统可靠性Power System Reliability电力系统自动装置Power System Automation Equipment电路测试技术Circuit Measurement Technology电路测试技术基础Fundamentals of Circuit Measurement Technology电路测试技术及实验Circuit Measurement Technology & Experiments 电路分析基础Basis of Circuit Analysis电路分析基础实验Basic Experiment on Circuit Analysis电视接收技术Television Reception Technology电视节目Television Porgrams电视节目制作Television Porgram Designing电视新技术New Television Technology电视原理Principles of Television电网调度自动化Automation of Electric Network Management电子机械运动控制技术Technology of Electronic Mechanic Movement Control电子技术Technology of Electronics电子技术腐蚀测试中的应用Application of Electronic Technology in Erosion Measurement 电子技术基础Basic Electronic Technology电子技术基础与实验Basic Electronic Technology & Experiment 电子技术课程设计Course Exercise in Electronic Technology电子技术实验Experiment in Electronic Technology动态规划Dynamic Programming动态无损检测Dynamic Non-Destruction Measurement动态信号分析与仪器Dynamic Signal Analysis & Apparatus锻压工艺Forging Technology锻压机械液压传动Hydraulic Transmission in Forging Machinery 锻压加热设备Forging Heating Equipment发电厂Power Plant发电厂电气部分Electric Elements of Power Plants法律基础Fundamentals of Law法学概论An Introduction to Science of Law 法学基础Fundamentals of Science of Law 翻译Translation非线性振动Non-Linear Vibration沸腾燃烧Boiling Combustion分析化学Analytical Chemistry分析化学实验Analytical Chemistry Experiment分析力学Analytical Mechanics风机调节Fan Regulation概率论与数理统计Probability Theory & Mathematical Statistics 概率论与随机过程Probability Theory & Stochastic Process钢笔画Pen Drawing钢的热处理Heat-Treatment of Steel钢结构Steel Structure钢筋混凝土Reinforced Concrete高等数学Advanced Mathematics高电压技术High-Voltage Technology高电压测试技术High-Voltage Test Technology高分子材料High Polymer Material高分子材料及加工High Polymer Material & Porcessing高分子化学High Polymer Chemistry高压测试技术High-Voltage Testing Technology高压电场的数值计算Numerical Calculation in High-Voltage Electronic Field 高压电器High-Voltage Electrical Appliances高压绝缘High-Voltage Insulation高压实验High-Voltage Experimentation高压试验技术High-Voltage Experimentation Technology工程概预算Project Budget工程经济学Engineering Economics工程静力学Engineering Statics工程力学Engineering Mechanics工程热力学Engineering Thermodynamics工程项目评估Engineering Project Evaluation工业建筑设计原理Principles of Industrial Building Design 工业经济理论Industrial Economic Theory工业经济学Industrial Economics工业企业财务管理Industrial Enterprise Financial Management 工业企业财务会计Accounting in Industrial Enterprises工业企业管理Industrial Enterprise Management公文写作Document Writing古代汉语Ancient Chinese古典文学作品选读Selected Readings in Classical Literature固体激光Solid State Laser固体激光器件Solid Laser Elements固体激光与电源Solid State Laser & Power Unit光电信号处理Photoelectric Signal Processing光电信号与系统分析Photoelectric Signal & Systematic Analysis 光辐射探测技术Ray Radiation Detection Technology光谱Spectrum光谱分析Spectral Analysis光谱学Spectroscopy光学分析法Optical Analysis Method光学计量仪器设计Optical Instrument Gauge Designing 光学检测Optical Detection光学设计Optical Design光学信息导论Introduction of Optical Infomation 光学仪器设计Optical Instrument Designing国际金融International Finance国际经济法International Economic Law国际贸易International Trade国际贸易地理International Trade Geography 国际贸易实务International Trade Affairs国际市场学International Marketing函数分析Functional Analysis焊接方法Welding Method焊接方法及设备Welding Method & Equipment焊接检验Welding Testing焊接结构Welding Structure焊接金相Welding Fractography毫微秒脉冲技术Millimicrosecond Pusle Technique 核动力技术Nuclear Power Technology合唱与指挥Chorus & Conduction合金钢Alloy Steel宏观经济学Macro-Economics宏微观经济学Macro Micro Economics弧焊原理Arc Welding Principles互换性技术测量基础Basic Technology of Exchangeability Measurement 互换性技术测量Technology of Exchangeability Measurement互换性与技术测量Elementary Technology of Exchangeability Measurement互换性与技术测量实验Experiment of Exchangeability Measurement Technology 画法几何及机械制图Descriptive Geometry & Mechanical Graphing化学文献Chemical Literature化学文献及查阅方法Chemical Literature & Consulting Method化学粘结剂Chemical Felter环境保护理论基础Basic Theory of Environmental Protection 环境化学Environomental Chemistry环境行为概论Introduction to Environmental Behavior活力学Energy Theory活塞膨胀机Piston Expander活塞式制冷压缩机Piston Refrigerant Compreessor活塞式压缩机Piston Compressor活塞式压缩机基础设计Basic Design of Piston Compressor活塞压缩机结构强度Structural Intensity of Piston Compressor机床数字控制Digital Control of Machine Tool机床液压传动Machinery Tool Hydraulic Transmission机电传动Mechanical & Electrical Transmission机电传动控制Mechanical & electrical Transmission Control机电耦合系统Mechanical & Electrical Combination System机电系统计算机仿真Computer Simulation of Mechanic/Electrical Systems机械零件Mechanical Elements机械零件设计Course Exercise in Machinery Elements Design机械零件设计基础Basis of Machinery Elements Design机械设计Mechanical Designing机械设计基础Basis of Mechanical Designing机械设计课程设计Course Exercise in Mechanical Design机械噪声控制Control of Mechanical Noise机械制造概论Introduction to Mechanical Manufacture 机械制造工艺学Technology of Mechanical Manufacture机械制造基础Fundamental of Mechanical Manufacture机械制造基础(金属工艺学) Fundamental Course of Mechanic Manufacturing (Meta 机械制造系统自动化Automation of Mechanical Manufacture System激光技术Laser Technology激光加工Laser Processing激光器件Laser Devices激光器件与电源Laser Devices & Power Source激光原理Principles of Laser激光原理与技术Laser Principles & Technology计算机导论与实践Introduction to Computers & Practice计算机辅助设计CAD计算机辅助设计与仿真Computer Aided Design & Imitation计算机辅助语言教学Computer-Aided Language Teaching 计算机辅助制造Computer-Aided Manufacturing计算机概论Introduction to Computers计算机算法基础Basis of Computer Algorithm计算机图形显示Computer Graphic Demonstration计算机图形学Computer Graphics计算机网络Computer Networks计算机系统结构Computer Architecture计算机语言处理Computer Language Processing检测技术Measurement Technique检测系统动力学Detection System Dynamics 检测与控制Detection & Controling简明社会学Concise Sociology简明世界史Brief World History减振设计Vibration Absorption Designing建筑力学Architectural Mechanics建筑名作欣赏Appreciation of Architectural Works 建筑入门Elementary Architecture建筑摄影Architectural Photographing建筑设备Architectural Equipment建筑设计Architectural Design结构程序设计Structural Program Designing 结构动力学Structural Dynamics结构化学Structural Chemistry结构检验Structural Testing结构力学Structural Mechanics结构素描Structure Sketching金属X射线学Metal X-Ray Analysis 金属材料焊接Metal Material Welding 金属材料学Metal Material Science金属材料与热处理Metal Material & Heat Treatment 金属腐蚀与保护Metal Erosion & Protection金属腐蚀原理Principles of Metal Erosion金属熔炼Metal Melting金属塑性成形原理Principles of Metal Forming金属物理性能Physical Property of Metal金属学Metallography金属学与热处理Metallography & Heat Treatment 金属学原理Principles of Metallography精密测量技术Technology of Precision Measurement 精密电气测量Precise Electric Measurement精密合金Precise Alloy精密机械CAD CAD for Precision Machinery精密机械课程设计Course Design for Precision Machinery 精密机械零件Precision Machinery Elements经济新闻Economic News经济学说史History of Economics经济学原理Principles of Economics经济预测Economic Predicting经济预测与管理奖惩Economic Predicting & Management 经济原理Principles of Economy抗干扰技术Anti-Jamming Technique科技翻译Scientific English Translation科技管理Technological Management。
用于自动驾驶系统的路径规划技术研究
摘要摘要自动驾驶是目前科技领域的一个前沿热点技术,在谷歌、特斯拉、Uber等科技公司的刺激下,科研机构和汽车制造厂商纷纷调配资源来加快该技术相关的研发工作。
路径规划技术是自动驾驶系统中必不可少的技术模块。
路径规划依赖于高精度地图,规划车体行驶的最优路线,实现从起始点到目标点的任务需求。
路径规划技术也被广泛运用在游戏线路搜索、扫地机器人、物流配送、仓储巡检等场景中,因此便需要路径规划算法能够适应更为复杂的环境地图,同时又能节省时间成本。
从算法本身特点及环境复杂度出发,采取对单一算法的改进和多种算法的融合方法,对路径规划技术的研究具有重要意义。
本文从全局路径规划和局部路径规划两部分着手,分别对这两部分的算法进行研究。
根据全局路径规划A*算法的原理,仿真对比了A*算法中常用的四种不同启发函数的寻路效果,同时提出一种改进的加权曼哈顿距离启发函数,仿真验证该启发函数提高了A*算法的寻路效率,在搜索到的路径长度,搜索时间和搜索的结点数量方面均具有优越性;根据局部路径规划DWA算法的原理,对该算法评价函数中三项评价指标的权重值如何选取进行了仿真分析,通过将采用加权曼哈顿距离的A*算法和DWA算法融合,使融合后的算法尽可能贴近全局最优路径,有效避免了DWA算法容易陷入局部最优的缺点,同时缩短了算法的运行时间。
根据自动驾驶系统的关键技术组成,对机器人底盘和激光雷达进行选型,搭建了无人车硬件平台;以ROS系统的工作框架和基本特点为基础,对导航包组织框架各模块作用的详细分析,研究了move_base包进行路径规划算法验证的具体方法,配置了本文研究的算法插件和机器人可视化模型;实验部分通过对move_base包中关键参数的配置,分别搭建静态和动态实验环境,完成路径规划的实验验证与结果分析,证明本文研究的算法具有一定的实用性。
关键词:全局规划,局部规划,ROS,最优路径,运行时间AbstractAbstractAutonomous driving is a hot frontier technology in the field of science and technology at present. Spurred by Google, tesla, Uber and other technology companies, scientific research institutions and automobile manufacturers have deployed resources to accelerate the research and development related to this technology. Path planning technology is an essential technology module in the automatic driving system. Path planning relies on high-precision map to plan the optimal route for the vehicle, so as to achieve the task requirements from the starting point to the target point. Path planning technology is also widely used in game route search, sweeping robot, logistics distribution, warehouse inspection and other scenarios. Therefore, path planning algorithm is required to be able to adapt to more complex environment map and save time cost. Starting from the characteristics of the algorithm itself and the complexity of the environment, it is of great significance to study the path planning technology by improving the single algorithm and integrating multiple algorithms.This paper studies the algorithms of global path planning and local path planning respectively. According to the principle of global path planning A* algorithm, the simulation compares the path planning effect of four different heuristic functions commonly used in A* algorithm, and puts forward an improved heuristic function with weighted Manhattan distance. The simulation verifies that the heuristic function improves the path planning efficiency of A* algorithm, and has advantages in the length of the searched path, the search time and the number of nodes searched. According to the principle of local path planning DWA algorithm, how to select the weight of three evaluation indexes of the evaluation function of this algorithm is simulated and analyzed.By fusing A* algorithm with weighted Manhattan distance and DWA algorithm, the fusing algorithm is made as close as possible to the global optimal path, which effectively avoids the shortcoming that DWA algorithm is prone to fall into local optimal, and meanwhile reduces the running time of the algorithm.According to the key technology composition of the automatic driving system, the robot chassis and lidar are selected, and the hardware platform of the unmanned vehicle is built;Based on the working framework and basic characteristics of ROS用于自动驾驶系统的路径规划技术研究system, the function of each module of navigation stack organization framework was analyzed in detail, and the specific method of move_base package for path planning algorithm verification was studied. The algorithm plug-in and robot visualization model studied in this paper were configured.In the experimental part, the key parameters in move_base package were configured, the static and dynamic experimental environments were set up, and the experimental verification and result analysis of path planning were completed, which proves that the algorithm studied in this paper has certain practicability.Key Words: Global path planning, Local path planning, ROS, Optimal path, Running timeIV目录目录第1章绪论 (1)1.1 课题研究背景与意义 (1)1.2 自动驾驶技术发展现状 (2)1.2.1 国外自动驾驶发展现状 (2)1.2.2 国内自动驾驶发展现状 (4)1.3 路径规划技术的发展概况 (5)1.3.1 传统算法 (5)1.3.2 智能算法 (6)1.3.3 启发式算法 (7)1.3.4 路径规划技术发展趋势 (8)1.4 论文章节安排 (8)第2章全局路径规划算法 (10)2.1 引言 (10)2.2 A*算法原理 (10)2.3 A*算法实验仿真 (12)2.4 改进的启发函数 (15)2.5 本章小结 (17)第3章局部路径规划算法 (19)3.1 引言 (19)3.2 DWA算法原理 (19)3.2.1 车体运动模型建立 (19)3.2.3 速度采样 (20)3.2.4 评价函数 (22)3.3 DWA算法仿真 (24)3.4 全局规划算法与局部规划算法的融合 (29)3.4.1 DWA算法存在的缺点 (29)3.4.2 A*算法与DWA算法的融合 (29)3.4.3 融合A*算法的DWA算法实验仿真 (30)3.5 本章小结 (34)用于自动驾驶系统的路径规划技术研究第4章机器人自动驾驶系统搭建 (35)4.1 引言 (35)4.2 硬件平台搭建 (35)4.2.1 机器人平台 (35)4.2.2 激光雷达 (38)4.3 软件系统设计 (41)4.3.1 ROS架构 (41)4.3.2 导航包模块构成 (42)4.3.2 全局路径规划算法扩展 (46)4.3.3 局部路径规划算法扩展 (47)4.3.4 机器人可视化模型的建立 (48)4.4 本章小结 (50)第5章路径规划实验验证 (51)5.1 引言 (51)5.2 move_base包参数配置 (51)5.2.1 通用文件配置 (52)5.2.2 全局规划文件配置 (52)5.2.3 本地规划器配置 (53)5.2.4 局部规划文件配置 (54)5.3 实验结果及分析 (54)5.3.1 静态环境下实验结果 (54)5.3.2 动态环境下实验结果 (56)5.3.3 实验结果分析 (58)5.4本章小结 (60)第6章总结与展望 (62)参考文献 (65)致谢 (69)作者简历及攻读学位期间发表的学术论文与研究成果 (71)第1章绪论第1章绪论1.1 课题研究背景与意义在智慧交通和人工智能技术飞快发展的今天,自动驾驶系统通过去除人力化成本,为人们的生活带来更多的便捷。
路段的负载表示模型毕业设计论文

目录1. 绪论 (1)1.1 课题研究背景与意义 (1)1.2 国内外研究现状 (2)1.2.1 国外研究现状 (3)1.2.2 国内研究现状 (5)1.3课题研究内容和结构 (6)1.4 小结 (6)2. 路段负载的评定 (7)2.1引言 (7)2.2指标的选取 (7)2.2.1 出行距离 (7)2.2.2 出行时间 (7)2.2.3 出行费用 (8)2.3小结 (8)3. 路段负载模型的研究 (8)3.1引言 (9)3.2 路段负载的权重表示模型 (9)3.2.1 提出模型 (9)3.2.2 模型分析 (10)3.3参数采集和模型验证 (10)3.4 小结 (14)4. 路段负载表示模型的设计与实现 (15)4.1系统模拟环境 (15)4.2 系统模块的设计代码 (15)4.3 程序仿真 (16)4.4 模拟结果展示 (18)4.4.1工业路路段负载图 (18)4.4.2乌山路段负载图 (19)4.4.3福新东路路段负载图 (19)4.5小结 (20)总结与展望 (21)致谢 (22)参考文献 (23)路段的负载表示模型摘要长期以来,交通问题已成为困扰城市发展的重要问题。
我们必须进行合理的交通规划,交通规划中的一项重要内容是进行交通流的合理组织与分配,以此来达到提高交通设施容量、均衡负载、缓解交通压力的目的。
路段负载模型能够反映交通流组织对路段负载的影响。
进行交通分配的首要务是对路段负载进行计算,最终实现交通流在路网各路段上的合理实时动态分配。
路段负载作为交通规划基础,对其进行深入的研究是十分必要的。
本文针对交通路网中道路的本质特征,利用道路间的相交关系描述交通路网,给出了与概念模型相匹配的数据,通过融合相关交通信息减少了数据冗余。
通过构建一个负载路网的表示模型,提出了之相适应的模型算法,实现路径寻优,得到最优路径规划。
文章最后通过福州三个路段对提出的路段负载模型经过数学运算和Turbo.c2.0平台实现与验证。
移动机器人的智能路径规划算法综述
完全遍历路径 2种 。 1.1 点 对 点 路 径 规 划
根据移动机器人 所处外部环境信息 的获取情况将 点对 点路径规划 分 为全局 路 径规 划和 局部 路径 规划 。全局 路径规划 。。 是在 已知的环境信 息下 ,在事先 建好 的环境模 型 中,获得从初始地到 目标地 的最优路径 ,其优点是保证 了 规划路径 的最优 性 和可 达性 。局部 路径 规划 是在 未 知 环境 中,基于传感器获取周 围环境信息 ,并使机器人 自主获 得一条无碰撞 的最优路径 ,其 优点是 更具有 对于未 知环境 的适应性 和规划 的实时性 。 1.1.1 全 局路 径 规 划
, (山东农业大学 机械与 电子 工程 学院 山东省 园艺机械与装备重点 实验室 ,山东 泰 安 271000)
摘 要 :针对 目前移动机器人路径规划所处 的的环境 复杂度高 、随机性 强等情况 ,难 以有效地实 现最 优路 径规划 的问题 ,从移动机器人 的实 际应 用出发 ,对点对 点路径规 划和遍历 路径规划 、全局 路径规 划和局 部 路径规划进行 综述 ,对各类规划方 法进 行分析与归纳 ;重点分 析强化学 习算法 的路径规划 技术 ;针对 目前 路径规划算法存在 的问题 ,提 出类脑智 能算 法应 用于路径规划 的探索 ,同时给 出路径规划在农业装备应 用 的新 思路。 关键 词 :移动机器人 ;路径规划 ;强化学 习;类 脑智能 中图分类号 :TP18 文献标识码 :A 文章编号 :1000-9787(2018)08-0005-04
Abstract:High complexity and randomness of the environment for mobile robots path planning,it is dif i cult to rea lize the optimal path planning,aim ing at point—to-point path planning and coverage path planning,global and loca l path planning are reviewed.All kinds of planning methods are summ ed up and analyzed,and em phatically introduce the reinforcement learning algorithm for path planning.An idea is presented with a brain—inspired intelligence algorithm for robot path planning.A new idea for application of path planning in agricultural equipment is put forward. Keywords: mobile robot;path planning;reinforcement learning;brain—inspired intelligence
基于双维度搜索的地下自主铲运机最优转弯轨迹规划

基于双维度搜索的地下自主铲运机最优转弯轨迹规划顾 青1,2),刘 立1),白国星1),孟 宇1)✉1) 北京科技大学机械工程学院,北京 100083 2) 北京科技大学顺德研究生院,佛山 528300✉通信作者,E-mail: ************.cn摘 要 提出了一种基于双维度搜索的实时轨迹规划方法,用来解决自主地下铲运机转弯轨迹规划问题. 该方法是一种结合采样思想和最优化算法的复合轨迹规划方法,包含三个主要步骤:基于双维度搜索策略的优化模型参数生成,基于二次规划的轨迹计算,以及基于约束检查的最优轨迹确定. 该方法新颖之处在于提出的基于转弯区域行驶时间和里程的双维度搜索策略,以及基于平稳目标的轨迹最优化模型,可根据弯道区域入口速度和位置,快速生成纵横向都有最优性保证的最优轨迹.该方法结构简单、易于实施,可通过关键参数的调整满足控制器对轨迹生成速度的实时性要求. 基于该轨迹规划方法的特点,使其不仅适用于实时轨迹规划,还可为未来智慧矿山的智能管控与优化调度提供底层约束. 多组算例验证了该方法的有效性和优越性.关键词 地下铲运机;自主行驶;轨迹规划;纵横向轨迹规划;搜索策略分类号 TP202.7Optimal turning trajectory planning of an LHD based on a bidimensional searchGU Qing 1,2),LIU Li 1),BAI Guo-xing 1),MENG Yu 1)✉1) School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China 2) Shunde Graduate School, University of Science and Technology Beijing, Foshan 528300, China✉Corresponding author, E-mail: ************.cnABSTRACT To solve the problem of smooth turning of an autonomous underground load-haul-dump loader (LHD), in this paper, amethod for turning trajectory planning of an LHD was proposed. This method is a type of hybrid trajectory planning method based on a bidimensional search. According to the characteristic of the problem, the longitudinal and lateral decomposition method was applied, and the basic algorithms are a sampling method and an optimization algorithm. The algorithm consists of three main steps that are parameter generation of the optimal model based on a bidimensional search strategy, trajectory calculation based on quadratic programming models, and determination of the optimal trajectory based on an articulated angle and collision avoidance constraints check. The novelty of this method lies in the proposed two-dimensional search strategy and trajectory optimization models. The two dimensions are the driving time and mileage of the trajectory in the turning area; the trajectory optimization model is based on the quadratic programming that can quickly generate the optimal trajectory in both dimensions according to the turning area entering speed and position of the LHD.This trajectory planning method is simple in structure and easy to implement. Moreover, it can satisfy the real-time requirement of the controller on the trajectory generation time by adjusting the key parameters. Based on the characteristics of the trajectory planning method, it is not only suitable for real-time trajectory planning but can also provide basic constraints for intelligent control and optimal scheduling of intelligent mines. A series of case studies was conducted to show the effectiveness and superiority of the proposed method.The case studies show that the optimal trajectories according to different entering speeds and positions can be obtained through the proposed method. A prototype experiment was performed to show the feasibility of the proposed trajectory planning method. This收稿日期: 2020−11−09基金项目: 国家重点研发计划资助项目(2018YFC0810500, 2019YFC0605300);广东省基础与应用基础研究基金资助项目(2019A1515111015)工程科学学报,第 43 卷,第 2 期:289−298,2021 年 2 月Chinese Journal of Engineering, Vol. 43, No. 2: 289−298, February 2021https:///10.13374/j.issn2095-9389.2020.11.09.002; method generates trajectories that are easy to track and control because the velocity, articulated angle, and angular velocity change gently.KEY WORDS load haul dump;autonomous driving;trajectory planning;vertical and horizontal trajectory planning;search strategy地下铲运机是一种铰接式结构的地下无轨移动采矿装备,具有转弯半径小,地形适应能力强的特点,广泛应用于矿产开采和运输. 随着采矿行业的发展,采矿深度不断增加,地下高温高湿环境对驾驶员身体有极大伤害,因此,自主行驶成为新一代智能移动采矿装备的必备功能.为了实现铲运机的自主行驶,轨迹规划与控制方法被广泛的研究[1−11]. 文献[1]~[8]研究了地下铲运机的导航控制方法,进而实现铲运机可以在地下巷道内采用“沿壁法”安全避障行驶. 文献[8]在无约束小范围内,可在铲装点和卸载点之间生成平滑行驶路径. 文献[9]提出了一种基于蚁群算法的路径规划方法,在地下巷道环境内,可生成全局最优路径. 文献[10]提出一种自主导航控制框架:首先人工示教生成导航地图和驾驶提示信息,然后在自主行驶时依照驾驶提示信息行驶. 基于这些研究,目前铲运机自主行驶技术可分为两类:一类是路径规划和跟踪,此类方法没有考虑到速度因素,因此对于行铲运机工作效率无法考虑,同时行驶速度较慢;另一类是先人工示教,然后自主行驶. 此类方法受到驾驶员经验影响较大,一般在直道中可以以较高的速度行驶,而接近转弯区域时,为了避免与巷道壁碰撞,驾驶员通常会提前减速,以很低的速度通过转弯区域,也就是说,通过转弯区域的行驶时间较长. 因为铲运机的地下金属开采工作主要是出矿,通常每个“铲—运—返”工作循环都要转弯,所以,转弯区域通过时间长会影响铲运机工作效率. 总的来说,目前铲运机的自主行驶水平还处于初级阶段.对于采用跟踪目标要来完成自主行驶功能的控制框架来说,除了研究高精度的跟踪控制算法[11−12],进行高质量的轨迹规划也是提高自主行驶水平的有效途径. 目前针对乘用车轨迹规划法方法的研究很多,总体可以分为直接法[13−19]、基于解耦的方法[20−32],较好的解决了乘用车在边界曲率平缓的公路上的轨迹规划问题. 文献[31]研究了铲运机在地下巷道内典型循环工况的轨迹规划问题,可视为一种转弯轨迹规划问题. 其中,纵向轨迹规划是一个二次规划问题,易于求解. 然而横向轨迹还是一个非线性优化模型,因此求解时间较长(而且有可能得不到最优解或可行解);此外,研究发现,当转弯角度过大时,现有的约束并不能约束铰接角及其角速度. 究其原因,还是没有将铰接角及其角速度作为决策变量加入到优化模型之中,无法对其直接约束. 然而,若是直接将铰接角及其角速度作为决策变量,则根据其运动状态方程,轨迹优化模型一定是一个复杂的非线性优化模型,能否得到最优解或可行解都没有保障.为了解决上述问题,提高自主铲运机的弯道行驶性能,根据铲运机及其行驶环境特点,本文提出了一种基于双维度搜索的地下铲运机最优转弯轨迹规划方法. 本文的贡献及新颖之处在于设计了一种基于行驶里程和时间的双维度搜索策略,在轨迹计算阶段,建立了一种以平稳行驶为目标的纵横向解耦二次规划模型,其中,铰接角及铰接角速度约束并不在优化模型中直接考虑,而是通过对生成轨迹进行约束条件检查来筛选得到满足约束的最优轨迹. 与现有规划方法不同的是,使用本文提出的方法可以快速得到在纵向横向两个维度都具有最优性保证的轨迹,不需要后备策略,保障了导航控制系统中轨迹规划层的可靠性,提高了生成轨迹的质量和速度,使铲运机在转弯时可以合理调整行驶速度和位置,实现高效转弯,提高生产效率.本文提出的方法具有以下特点:能够生成平稳的转弯轨迹,模型简单易于实时求解,所得到的轨迹具有最优性保证,不需要后备策略.文章结构如下,第一章介绍铲运机运动学模型、转弯区域模型及所研究的具体问题,第二章介绍轨迹规划方法框架,第三章介绍轨迹规划方法数学模型,第四章和第五章是算例分析与样机试验,验证本文提出的方法有效性和优越性,第五章总结结论.1 对象、场景模型与问题描述1.1 铲运机运动学模型P AP f(x f,y f)P r(x r,y r)θfθrP f P r P A L f L rγθfθr由于铲运机(Load haul dump,LHD)具有铰接结构,对其运动姿态的描述与刚性车辆不同,在运动规划时需要同时考虑其航向角和铰接角. LHD 的整体结构如图1所示,车体由两部分组成.是前后车体的交接点,是前桥中心点,是后桥中心点,和分别是前后车体的航向角. 和与之间的距离分别为和. 定义铰接角为与之差· 290 ·工程科学学报,第 43 卷,第 2 期P f P r 和之间的位置关系可以表示为铰接车辆的运动学模型[30]可以描述为v f ˙γγ其中,为前车体速度,为铰接角的角速度. 可知,前车体航向角的角速度为铰接角及其角速度的物理约束为γmin γmax ˙γmin ˙γmax 其中,为铰接角最小值,为铰接角最大值,为铰接角速度最小值,为铰接角速度最大值.1.2 弯道区域模型转弯区域如图2所示. 图2(a )中,巷道A 与O L safe αL A L B (x out ,y out )L ′A L ′BB 相交,铲运机从巷道B 向巷道A 转弯. 在路口建立直角坐标系,为转弯区域起点位置,位于巷道A ,弯道区域直角坐标系Y 轴垂直于巷道B 的边界;红色虚线为转弯区域结束的位置,垂直于巷道A 的边界. 是安全距离长度,黑色虚线之间的蓝色阴影部分是除去安全边界的可行区域;为两巷道夹角;和分别为巷道A 和B 在转弯区域的长度. 是弯道出口处左边界点位置坐标. 地下巷道转弯处都会根据铰接式采矿装备的转弯半径进行有磨角,目的是为了使这类移动采矿装备能够安全通过路口. 磨角后,转弯处可行区域增大,如图2(b )所示,和是磨角操作后巷道A 和巷道B 的剩余长度.1.3 问题描述当铲运机进入转弯区域时,根据铲运机当前速度、位置,实时生成一条平稳轨迹,使铲运机能够在安全转弯的情况下,平稳的行驶出转弯区域.在轨迹规划时,要满足下列约束条件:(1)前后车体都不与巷道壁发生碰撞;(2)铲运机速度不超过限速;(3)铰接角和铰接角速度不超过设计约束值;(4)在驶出转弯区域时,前车体方向与巷道壁平行.2 轨迹规划算法框架2.1 最优轨迹存在性分析在矿山建设中,巷道的结构和尺寸与矿产种类、分布、采矿工艺相关. 也就是说,在建设之初,巷道尺寸和拟选用的采矿装备是相互匹配的. 而且,在地下巷道的路口处,都要根据采矿装备的转弯半径进行磨角,这是一种标准操作,目的就是为了能使铰接式的移动采矿装备可以安全无碰撞通过路口. 因此,对于给定铲运机以及符合其标准的图 1 LHD 结构Fig.1 Structure of an LHD图 2 地下巷道转弯区域. (a )磨角之前的转弯区域;(b )磨角之后的转弯区域Fig.2 Roadway tuning area: (a) before grinding; (b) after grinding顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 291 ·路口,铲运机一定能够顺利通过.轨迹同时包含速度和位置信息,通常来说,可以通过路口的轨迹不止一条. 当铲运机采用不同的速度,沿不同曲率的路径曲线,都可以安全通过路口. 例如:对于一条比较平缓的位置曲线,采用不同的速度都可以很好的沿此位置曲线行驶,但是每种速度对应了不同的轨迹. 因此,当对轨迹设置一个的评价指标后,则在可行轨迹之中,存在一个最优指标值最小的最优解,本文的目标正是寻找这一最优轨迹.2.2 算法思想及框架本质上,弯道区域中每条可行轨迹可以通过不同行驶里程和行驶时间表征. 因此,为了能够根据入口速度和位置快速的生成最优轨迹,本文提出一种基于双维度搜索策略的轨迹优化方法. 此方法核心思想是在弯道行驶区域内,通过调整轨迹的里程和时间,找到最优轨迹. 本方法采用最优化算法进行构建,总体过程是:根据里程和时间迭代策略给出的终端位置和行驶时间,计算轨迹并检查是否符合铲运机铰接角物理约束,最终得到最优轨迹. 因此,算法主要包含三步:(1)确定行驶里程和行驶时间.此步骤的作用是确定当前轨迹规划问题的行驶里程与时间. 设计了一种双维度搜索策略,每次在轨迹计算前,首先通过搜索策略,从终端位置和行驶时间两个维度进行调整,确定当前迭代的终端位置和行驶时间.(2)轨迹生成.在转弯区域直角坐标系下,将轨迹分解为纵向和横向两个维度,分别采用二次规划生成最优轨迹(此时并不考虑铰接角约束). 本算法中,横纵向轨迹都建模为二次规划问题,因此,所得到的轨迹在纵向和横向两个维度都具有最优性保证,而且求解速度快.(3)轨迹铰接角约束检查及最优轨迹确定.对于生成的轨迹,根据运动学方程计算铰接通过,则最优轨迹找到;否则,回到第一个步骤进入下一次迭代.使用本算法,针对一个转弯路口,基于铲运机进入转弯区域的位置和速度,本文提出的方法能够快速的找到一条纵向和横向都具有最优性保证的最优轨迹,不需要后备策略. 第三章介绍规划算法的具体细节.3 轨迹规划算法3.1 基于双维度搜索的终端位置和行驶时间确定本算法中利用二次规划构建轨迹生成模型,设计基于双维度搜索的策略来确定优化问题的具体条件. 其中,外循环调整轨迹的行驶时间,内循环调整轨迹终端位置. 在每次循环中,首先计算纵向轨迹,然后计算横向轨迹.i j T i j 记为外循环中的循环变量,为内循环中的循环变量,每次循环中行驶时间通过方程(8)设置,v in ∆v 其中:是铲运机进入转弯区域的入口速度;为速度递减间隔.(x end i j ,y end i j )每次循环中轨迹终端位置,通过如下方程设置,W B ∆d =(W B −2L safe )/m m 其中:为巷道B 宽度;为位置递增间隔,即将巷道B 的可行宽度进行等间隔离散后的离散长度,为间隔离散个数.3.2 基于二次规划的转弯轨迹计算本算法中轨迹计算是基于纵向横向解耦和二次规划完成的. 首先生成纵向行驶轨迹,然后生成横向行驶轨迹.(1)纵向轨迹规划模型.N 将转弯轨迹离散为段,纵向轨迹规划建模为一· 292 ·工程科学学报,第 43 卷,第 2 期J lo ∆t =T i /N T i k λ1λ2ε1x i v x i a x i ∆a x i x 0=0v x 0=v x in a x 0=a x in v x in a x in 其中:是纵向轨迹目标函数;,是第i 次外循环时铲运机行驶时间;是轨迹点序号;和为权重系数,是松弛变量,是铲运机前桥中心点纵向位置;是前桥中心点纵向速度,和分别是前桥中心点纵向加速度和加速度变化量,,,;公式(11-5)表示的约束是为了令轨迹终端姿态与巷道壁平行. 和分别是铲运机进入转弯区域的入口纵向速度和在本算法中,在目标函数是最小化加速度及其变化量. 没有将目标速度考虑在优化模型之中,这是因为在弯道区域,理想的目标速度很难设定,设置不好会造成实际速度曲线发生突变,难以控制.(2)横向轨迹规划模型.横向轨迹规划也采用二次规划模型,与文献[30]中方法不同的是,此时并不考虑铰接角相关约束,因此可以将横向轨迹规划模型也建立为一个标准J la ρ1ρ2ε2y i v y i a y i ∆a y i y 0=y in v y 0=v y in a y 0=a y in v y in a y in 其中:是横向轨迹目标函数;和为权重系数,是松弛变量,是铲运机前桥中心点横向位置;是前桥中心点横向速度,和分别是前桥中心点纵向加速度和加速度变化量,,,;公式(12-5)表示的约束是为了令轨迹终端姿态与巷道壁平行. 和分别是铲运机进入转弯区域的入口横向速度和加速度. 与纵向轨迹规划模型设计思想相同的是,目标函数是最小化加速度及其变化量.3.3 基于约束检查的最优轨迹确定γi −max ˙γi −max 上面的模型并未考虑铰接角约束,为了保证铰接角及其角速度符合约束,本算法设计了约束检查环节. 根据公式(4)可以计算得到此轨迹对应的铰接角和铰接角速度序列. 记本条轨迹中最大铰接角为、最大铰接角速度为,对于可行的轨迹,有同时,对于最优轨迹来说,松弛变量应该为0,即此外,还需进行碰撞检查,本文采用的是最为简单的膨胀法,此处不赘述.j =j +1j =m i =i +1若公式(13)、(14)和(15)同成立,且铲运机与边界没有碰撞,则迭代停止,当前轨迹为最优轨迹;否则,返回公式(9)和(10)进行内循环;若时都没有获得最优解,则,返回公式(8)进行外循环. 由于外循环相当于降低行驶速度,所以在延长转弯行驶时间的情况下,一定能找到符合约束的轨迹,此时迭代停止,当前轨迹为最优轨迹. 具体流程如图3所示.图 3 双维度搜索轨迹规划方法流程图Fig.3 Flow chart for the two-dimensional search-based trajectory planning method顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 293 ·4 算例分析与讨论为了验证本文提出的轨迹规划方法,设计了三组算例. 设置了一种难度较高的转弯场景,转弯角度为直角,且铲运机从宽巷道向窄巷道转弯行驶,描述了一种铲运机从运输巷道向开采巷道内转弯的场景. 算例参数如表1所示. 三组算例分别设计为:以相同的入口位置,不同的入口速度进入ij T bestγmax˙γmax转弯区域. 将入口位置分为三个等级,由于铲运机在地下平直巷道工作时限速一般为15 km·h−1,也就是4 m·s−1左右,因此将入口速度分为四个等级,入口方向都与巷道B保持平行. 然后,针对每个入口速度,求解其最优轨迹,求解采用Matlab quadprog 函数,并将得到最优轨迹时内循环次数、外循环的次数、最优轨迹对应的行驶时间,以及此条轨迹中的最大铰接角和最大角速度列出.表 1 算例参数表Table 1 Parameters for case studiesW A/m W B/m L A/m L B/mα/rad L safe/m∆v/(m·s−1)∆d/(m·s−1)m5 4.53030π/2 1.50.10.54L f/m L r/mγmin/radγmax/rad˙γmin/(rad·s−1)˙γmin/(rad·s−1)L′A/m L′B/m N1.52−0.690.69−0.170.17242433(1)第一组算例,入口位置为(0,1.5), 不同入口速度的最优轨迹计算结果列表如表2所示.表 2 第一组算例结果Table 2 Results of the first groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.510.0627442.840.510.06313433.330.470.06417428.540.420.06(2)第二组算例,入口位置为(0,2.5), 不同入口速度的最优轨迹计算结果列表如表3所示.表 3 第二组算例结果Table 3 Results of the second groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.510.0627442.840.530.06313433.330.50.07417428.540.450.08(3)第二组算例,入口位置为(0,3.5), 不同入口速度的最优轨迹计算结果列表如表4所示.表 4 第三组算例结果Table 4 Results of the third groupv in/(m·s−1)i j T best/sγmax/rad˙γmax/(rad·s−1)12366.670.530.0627442.840.560.07313433.330.530.08417428.540.480.09从上面的算例可以看出,针对不同的入口速度和位置,采用所提出的规划方法都可以得到最优轨迹.∆v∆v=0.2在相同的位置,入口速度越高,迭代次数越多. 根据本算例中的问题规模,单次轨迹生成时间为0.005 s左右,若是迭代上百次,则有可能超过控制周期(例如,当入口速度为4 m·s−1时,迭代次数为17×3×2=102次,则得到轨迹的时间超过了0.5 s),这就会影响轨迹跟跟踪性能. 因此,可以通过调整速度减小间隔这一迭代关键参数的方法来减少迭代次数. 例如,当 m·s−1时,迭代次数减少一半. 因此,本方法可以根据控制器性能,调整间隔,满足实际控制需求.vγvθfvθr为了更直观显示轨迹,以入口坐标为(0, 2.5),入口速度为2 m·s−1的情况为例,图4~6给出了最优轨迹的位置曲线,速度曲线、铰接角、航向角和相应的角速度曲线. 图6中,、和分别是铰接角和前后车体的航向角速度. 可以看出,沿行驶方向速度、铰接角和铰接角速度变化平缓,适合跟踪控制.y in=2.5,v x in=2图 4 位置曲线()y in=2.5,v x in=2Fig.4 Position trajectory ()· 294 ·工程科学学报,第 43 卷,第 2 期T best通过本文提出的方法可知,可视为以当前初始状态及平稳目标下铲运机通过弯道的最短时间. 因此,当找到最优轨迹之后,若将行驶时间继续延长,也就是继续外循环,也能找到满足新的行驶时间的解. 同理,对于一个固定的终端位置,只采用外循环延长时间,也可得到满足要求的最优轨迹,下面分别举例.对于入口位置为(0, 2.5),入口速度为2 m·s−1的情况,得到最优轨迹时,i=7,j=4,T best=42.84 s,轨迹在出口的终端位置为(33, 35). 此时,若保持此终端位置,将行驶时间设置为70 s,通过本文提出的方法得到最优转弯轨迹如图7~9所示.还是以入口位置为(0, 2.5),入口速度为2 m·s−1的情况为例,当要求铲运机行驶出转弯区域时,位置位于巷道中心线,也就是出口位置为(32.25, 35),采用本文提出的方法,只进行外循环,得到的最优轨迹如图10~12所示. 此时i=9,弯道行驶时间为46.15 s.y in=2.5,v x in=2图 5 行驶方向速度曲线()y in=2.5,v x in=2 Fig.5 Heading velocity trajectory ()y in=2.5,v x in=2图 6 铰接角、前后车体航向角及角速度()γθfθr y in=2.5,v xin =2Fig.6 Angle and angular velocity for , and ()T i=70s图 7 位置曲线()T i=70sFig.7 Position trajectory ()T i=70s图 8 行驶方向速度曲线()T i=70sFig.8 Heading velocity trajectory ()T i=70s 图 9 铰接角、前后车体航向角及角速度()γθfθr T i=70s Fig.9 Angle and angular velocity for , , and ()顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 295 ·5 样机试验为了表明算法的可行性,进行了样机试验. 样EθfE v机如图13所示. 采用激光雷达和电子地图进行定位. 工控机为研华ARK-3500,Intel Core i5-3610ME,2.7 GHz. 试验环境为楼道内的一个直角转弯处,楼道宽度为2.2 m. 由于是楼道试验,为了保证安全,最高速度设置为1 m·s−1. 试验参数设置如表5所示. 样机从转弯区域外开始启动并加速到1 m·s−1,保持此速度进入转弯区域,车辆控制周期为0.2 s.要求行驶出转弯区域时车辆位于巷道中线,基于本文提出的轨迹规划方法,得到最优解时,i=1,因此轨迹生成时间在一个控制周期之内. 所生成的轨迹时间为7.2 s,速度和角度曲线如图14所示.路径采用LTV-MPC进行控制,速度采用PID控制,样机也平稳安全的通过了直角弯道,图15显示了速度和航向角误差,其中,为前车体航向角跟踪误差,为铲运机速度跟踪误差. 可以看出,误差都保持在一个很小的水平.图 13 铰接车试验平台Fig.13 Articulated vehicle6 结论(1)本文提出的方法可以生成纵向和横向都具有最优性保证的轨迹,理论上保证了生成轨迹的最优性.(2)本文提出的方法优化得到的轨迹,其纵向速度、铰接角及角速度变化平缓,易于跟踪控制.(3)本文提出的算法可根据底层控制器的控制周期灵活调整迭代关键参数,进而调整轨迹生成时间,满足控制器对目标轨迹生成时间的要求.(4)本文提出的算法适用于宽窄不同的、角度不同的转弯路口,不需要复杂的边界处理与坐标转换,因此便于实际部署实施.(5)本文提出的方法既可以根据入口速度和位置生成安全平稳的最优转弯参考轨迹;也可用于根据具体条件确定弯道最短行驶时间,因此,不仅适用于实时轨迹规划,也可为多装备协同运行,甚至未来矿山的智能管控和调度等问题提供系统约束.图 10 位置曲线(出口位置为(32.25, 35))Fig.10 Position trajectory (exit position is (32.25, 35))图 11 行驶方向速度曲线(出口位置为(32.25, 35))Fig.11 Heading velocity trajectory (exit position is (32.25, 35))图 12 铰接角、前后车体航向角及角速度(出口位置为(32.25, 35))γθfθrFig.12 Angle and angular velocity for , , and (exit position is(32.25, 35))· 296 ·工程科学学报,第 43 卷,第 2 期参 考 文 献Mäkelä H, Lehtinen H, Rintanen K, et al. Navigation system forLHD machines. IFAC Proc Vol , 1995, 28(11): 295[1]Roberts J M, Duff E S, Corke P I. Reactive navigation andopportunistic localization for autonomous underground mining vehicles. Inf Sci , 2002, 145(1-2): 127[2]Dragt B J, Camisani-Calzolari F R, Craig I K. An overview of theautomation of load-haul-dump vehicles in an underground mining environment. IFAC Proc Vol , 2005, 38(1): 37[3]Larsson J, Broxvall M, Saffiotti A. A navigation system forautomated loaders in underground mines // Proceedings of the 5th International Conference on Field and Service Robotics (FSR -2005). Port Douglas, 2005: 1[4]Shi F, Gu H S, Zhan K, et al. Study on the control method ofunderground loader autonomous driving and obstacle avoidance.Nonferrous Met (Mine Sect ), 2015, 67(5): 68[5](石峰, 顾洪枢, 战凯, 等. 地下铲运机自主行驶与避障控制方法研究. 有色金属(矿山部分), 2015, 67(5):68)Yang C, Chen S X, Liu L, et al. Reactive navigation for undergro-und autonomous scraper. J China Coal Soc , 2011, 36(11): 1943(杨超, 陈树新, 刘立, 等. 反应式导航在地下自主行驶铲运机中的应用. 煤炭学报, 2011, 36(11):1943)[6]Long Z Z, Zhan K, Gu H S, et al. The control method based onimproved fuzzy-PID algorithm for the autonomous driving of intelligent LHD. Nonferrous Met (Mine Sect ), 2015, 67(5): 76(龙智卓, 战凯, 顾洪枢, 等. 基于改进模糊PID 算法的智能铲运机自主行驶控制方法. 有色金属(矿山部分), 2015, 67(5):76)[7]Andersson U, Mrozek K, Hyyppä K, et al. Path design and controlalgorithms for articulated mobile robots // Field and Service Robotics . London, 1998: 390[8]Long Z Z, Zhan K, Gu H S, et al. Global path planning ofintelligent load-haul-dump based on improved ant colony algorithm. Nonferrous Met (Mine Sect ), 2013, 65(2): 6(龙智卓, 战凯, 顾洪枢, 等. 基于改进蚁群算法的智能铲运机全局路径规划. 有色金属(矿山部分), 2013, 65(2):6)[9]Shi F, Gu H S, Zhan K, et al. The basic method study on thelocation-navigation and control strategy for the independent LHD unit. Nonferrous Met (Mine Sect ), 2009, 61(2): 65(石峰, 顾洪枢, 战凯, 等. 自主铲运机的定位导航和控制策略基本思路. 有色金属(矿山部分), 2009, 61(2):65)[10]Jiang C, Wang H W, Li J K, et al. Trajectory-tracking hybridcontroller based on ADRC and adaptive control for unmanned helicopters. Chin J Eng , 2017, 39(11): 1743(姜辰, 王浩文, 李健珂, 等. 无人直升机自抗扰自适应轨迹跟踪混合控制. 工程科学学报, 2017, 39(11):1743)[11]Invernizzi D, Lovera M, Zaccarian L. Dynamic attitude planningfor trajectory tracking in thrust-vectoring UAVs. IEEE Trans Autom Control , 2020, 65(1): 453[12]Ziegler J, Bender P, Dang T, et al. Trajectory planning for Bert-ha — A local, continuous method // 2014 IEEE Intelligent Vehicles Symposium Proceedings . Dearborn, 2014: 450[13]Ziegler J, Bender P, Schreiber M, et al. Making bertha drive—anautonomous journey on a historic route. IEEE Intell Transp Syst Mag , 2014, 6(2): 8[14]Liu C L, Lin C Y, Tomizuka M. The convex feasible set algorithmfor real time optimization in motion planning. SIAM J Control Optim , 2018, 56(4): 2712[15]Liu C L, Lin C Y, Wang Y Z, et al. Convex feasible set algorithmfor constrained trajectory smoothing // 2017 American Control[16]表 5 试验参数表Table 5 Parameters for experimentsW A /m W B /m L A /m L B /m α/rad L safe /m ∆v /(m·s −1)∆d /(m·s −1)m 2.22.23.63.6π/20.30.10.83L f /m L r /m γmin /rad γmax /rad ˙γmin /(rad·s −1)˙γmin /(rad·s −1)L ′A/m L ′B/m N 0.60.6−0.690.69−0.170.173.6 3.633图 14 参考速度和航向角曲线Fig.14 Reference trajectory for velocity and heading图 15 速度和航向角跟踪误差Fig.15 Tracking Errors trajectory for velocity and heading顾 青等: 基于双维度搜索的地下自主铲运机最优转弯轨迹规划· 297 ·。
自动化专业常用英语词汇

自动化专业常用英语词汇Introduction:In the field of automation, understanding and using the correct terminology is essential for effective communication and collaboration. This document aims to provide a comprehensive list of commonly used English vocabulary in the field of automation. The terms are categorized into different sections for ease of reference.1. General Automation Terms:- Automation: The use of technology and machinery to perform tasks without human intervention.- Control System: A system that manages and regulates the operation of machines or processes.- Programmable Logic Controller (PLC): A digital computer used for automation of electromechanical processes.- Human-Machine Interface (HMI): The interface that allows interaction between humans and machines.- Sensor: A device that detects and measures physical quantities, such as temperature or pressure.- Actuator: A device that converts control signals into physical action, such as moving a valve or motor.- Feedback: Information about the output of a system used to make adjustments or corrections.- Process Variable: A physical quantity that is measured and controlled in a process.- Fault Detection and Diagnosis (FDD): The process of identifying and diagnosing faults in a system or process.- SCADA (Supervisory Control and Data Acquisition): A system used to monitor and control industrial processes.2. Control and Instrumentation Terms:- PID Controller: A control loop feedback mechanism widely used in industrial control systems.- Setpoint: The desired value or target for a process variable.- Proportional Gain: The gain factor that determines the proportional response of a control system.- Integral Time: The time taken for the integral action of a control system to eliminate the steady-state error.- Derivative Time: The time taken for the derivative action of a control system to respond to changes in the process variable.- Transmitter: A device that converts a physical quantity into an electrical signal for transmission.- Flowmeter: A device used to measure the flow rate of a fluid.- Pressure Transducer: A device used to measure pressure and convert it into an electrical signal.- Temperature Controller: A device used to maintain a desired temperature in a system.- Level Sensor: A device used to measure and control the level of a liquid or solid material.3. Robotics and Automation Terms:- Robot: A machine capable of carrying out complex tasks automatically.- End Effector: The tool or device attached to the robot's arm to perform specific tasks.- Gripper: A device used to grasp and hold objects.- Manipulator: The mechanical arm of a robot that performs movements and tasks.- Path Planning: The process of finding an optimal path for a robot to reach its target.- Kinematics: The study of the motion of objects without considering the forces that cause the motion.- Artificial Intelligence (AI): The simulation of human intelligence in machines to perform tasks intelligently.- Machine Learning: A subset of AI that allows machines to learn and improve from experience without explicit programming.- Computer Vision: The field of AI that enables computers to interpret and understand visual information.4. Industrial Automation Terms:- Conveyor: A mechanical system used to transport materials or products from one location to another.- PLC Programming: The process of writing instructions for a programmable logic controller.- SCARA (Selective Compliance Assembly Robot Arm): A type of robot arm used for assembly tasks.- DCS (Distributed Control System): A control system used in large industrial processes.- HMI Design: The process of designing user-friendly interfaces for human-machine interaction.- Safety Interlock: A system that ensures safe operation by preventing access to hazardous areas.- Motion Control: The process of controlling the movement of machines or robotic systems.- Batch Control: The control of a process that involves a sequence of steps or operations.Conclusion:This comprehensive list of commonly used English vocabulary in the field of automation provides a solid foundation for effective communication and understanding. By familiarizing yourself with these terms, you will be better equipped to navigate discussions, collaborate with colleagues, and stay up-to-date with advancements in the field of automation. Remember to use these terms accurately and confidently to enhance your professional communication in the automation industry.。
boppps 算法

boppps 算法BOOPPS算法(BidirectionalOptimizedOptimalPathPlanningSystem)是一种智能机器人路径规划的算法。
它的出现填补了机器人路径规划中的空白,极大地提高了机器人的移动效率。
它的主要优势在于具有较高的表达精度,可以实现机器人的及时路径规划,而且可以实现更复杂的任务。
BOOPPS算法作为一种双向优化最优路径规划系统,可以实现机器人路径规划的最佳分组和执行。
算法主要是通过根据给定的机器人目标任务,分析和研究当前环境,对环境中实际存在的障碍物进行空间建模,形成路径规划的目标图,并通过A*算法和Dijkstra算法实现最优路径规划。
首先,算法根据环境情况确定初始结点和终点,然后用A*算法进行从起始结点到终点的路径规划,并生成从起点到终点的最优路径。
此外,算法使用双向A*算法对路径进行搜索,以减少路径搜索范围,快速找出最小路径。
最后,算法再用Dijkstra算法对起点和终点之间的节点进行向上向下搜索,以获得最优的路径规划结果,最终实现机器人的移动规划。
BOOPPS算法在机器人路径规划中的更多应用。
首先,它可以用于机器人自主移动规划,如自主开车、无人机和机器人搬运等,这种规划不仅可以帮助机器人快速顺利地完成任务,而且可以保证任务的准确性和可靠性。
此外,这种算法还可以用于机器人的环境感知规划,在规划过程中,算法可以根据环境中的障碍物,将机器人的运动路径规划出最小的空间,帮助机器人灵活有效地通过环境,有效提高移动效率。
同时,BOOPPS算法也可以用于机器人安全控制,它可以帮助机器人避开障碍物,保证机器人在自主移动过程中的安全性。
BOOPPS算法是一种功能强大、性能优越的智能机器人路径规划算法,它显著提高了机器人的移动效率,模型精度,帮助机器人顺利、准确、安全地完成任务。
未来,BOOPPS算法将会逐步更新完善,可应用于更复杂的环境和任务,为机器人路径规划带来更多便捷。
在自己擅长的领域科研例子

在自己擅长的领域科研例子杨x自大二起加入自动化系殷翔副教授的课题组,本科期间分别完成了三篇学术论文(均为第一作者),分别被控制领域top1的期刊IEEE Transactions on Automatic Control(TAC),权威期刊IEEE Transactions on Control of Network Systems(TCNS)和三大国际会议之一的 IEEE Conference on Decision and Control ( CDC ) 接收。
他的科研工作也受到了国际的关注,独立受邀担任控制领域另一三大会议之一的American Control Conference(ACC)审稿人,并入选加州大学洛杉矶分校交叉学者项目(UCLA-CSST 2020)。
谈起在本科如此繁忙的课业背景之下还能取得这些科研成绩,杨x将其归结为“兴趣”使然。
“搞科研最主要是兴趣,我从小对数理逻辑感兴趣,就像打游戏一样,想明白一个逻辑问题也可以得到快乐感。
当时间不够用的时候,总要牺牲一些娱乐的‘快乐’,才能获得科研上更大的快乐感。
”正是这份兴趣与热爱,让杨x早早开始了自己的实验室生活。
而关于自己高效的科研经历,杨x表示,“我首先会看大量的论文,不一定是局限于我的研究领域中的论文。
从这些论文中提取出的别人的本质思想是可以借鉴和迁移的。
当我有新idea之后我会和我的导师讨论交流,如果我们都觉得很有意思的话我会进行深入研究。
”在发表CDC论文之前,杨x研究的是控制系统信息流安全领域,在一次组会中,他偶然听了实验室学长关于机器人路径规划方面的学术汇报,于是就联想到了在安全约束下的机器人决策规划这个问题。
在与导师一番交流之后,他便着手开始了研究,最终成果发表于CDC 。
在发表于CDC 的“Secure-by-Construction Optimal Path Planning for Linear Temporal Logic Tasks”这篇文章中他首次将信息流安全引入到机器人决策与规划中,解决了面向复杂逻辑任务的机器人安全控制与路径规划问题。
基于GIS和改进遗传算法的最优路径规划
1 遗传算法的原理介绍
遗传算法是根据生物进化思想的启发而得出的 一种全局优化算法 , 在本质上是一种不依赖具体问 题的直接搜索方法 , 它仅需给出目标函数的描述 , 从全局空间出发搜索问题的最优解[4] 。其原理是从 一组随机产生的称为 “种群”的初始解开始搜索过 程 。种群中的每个个体是问题的一个解 , 称为 “染 色体 (由一串基因组成) ”。染色体在后续迭代中不 断变化 , 生成的下一代染色体称为后代 , 后代是前 一代染色体通过交叉或变异运算形成的 。群体不断 地经过遗传和进化 , 并且每次都按照优胜劣汰的规 则将适应度较高的个体更多的遗传到下一代 。这样 在经过若干代后 , 算法收敛于最好的染色体 , 它就 成为问题的最优解 。
函数如下 :
∑ ∑ min Z = min (α1 tij + α2 ( - lg Pij ) ) (3)
其中 0 ≤i , j ≤n , n 为顶点个数 。α1 、α2 为权
重系数 , 分别表示时间和安全性两个不同优化指标
的重要性 。
2009 年第 10 期
3 改进的遗传算法
311 染色体的编码表示 一条路径相当于一个染色体 。一条路径的染色
体编码 不 能 采 用 传 统 遗 传 算 法 中 的 数 值 编 码 方 式 (如二进制和实数编码) 而是采用该路径的结点序 列 , 这样才能更直接 、更具体地表达路径的实际意 义 , 同时也有利于适应度函数的选取和适应值的计 算 。结点号是染色体中的基因 。由于最优路径不应 该出现环路 , 因此染色体中不允许有重复的基因 码 。染色体的第一位置基因总是路径的源结点 , 最 后一个位置基因是目的结点 , 染色体的长度是变化 的 , 但不可能超过最大长度 N ( N 为无向图的结点 数) 。染色体的存储结构采用链表形式 , 其主要优 点是可以动态地插入和删除结点 。 312 初始种群的产生
14多无人机空中加油的最优会合航路规划

控 制 理 论 与 应 用
Control Theory & Applications
Vol. 32 No. 10 Oct. 2015
多无人机空中加油的最优会合航路规划
胡春鹤† , 陈宗基
(北京航空航天大学 自动化科学与电气工程学院, 北京 100191)
摘要: 为了空中加油能面向多架无人机, 本文提出了空中加油的三维最优会合航路规划算法. 多架无人机分布在 不同区域, 需要加油机沿预定的规划航路飞行会合, 以完成空中加油任务. 由于加油机可同时服务的受油机数量有 限, 需要寻找最优分配策略将无人机预分配至不同加油区域与之会合. 本文首先根据加、 受油机在各加油区域的最 短会合时间, 将最优分配问题建模为整数线性规划问题, 求解得到加油机与各无人机的最优会合点. 随后, 本文提 出了三维空间Dubins路径延长算法, 保证各无人机按照分配结果与加油机同时到达会合点. 最后, 分别针对二维和 三维多架无人机空中加油任务进行仿真. 仿真结果表明本文提出的最优会合航路规划算法得到的Dubins航路, 可以 保证空中加油会合任务在最短时间内完成. 关键词: 多无人机; 空中加油; 航路规划; 会合; Dubins路径 中图分类号: TP273 文献标识码: A
Optimal rendezvous path planning for multiple unmanned aerial vehicle on air refueling
HU Chun-he† , CHEN Zong-ji
(School of Automation Science and Electrical Engineering, Beihang University, Beijing 100191, China)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Nonlinear Dyn(2014)78:1515–1543DOI10.1007/s11071-014-1532-9ORIGINAL PAPEROptimal path planning of a cable-suspended robot with moving boundary using optimal feedback linearization approachM.H.Korayem·H.Tourajizadeh·A.Zehfroosh·A.H.KorayemReceived:3February2014/Accepted:9June2014/Published online:1July2014©Springer Science+Business Media Dordrecht2014Abstract In this paper,the optimal path of a cable-suspended robot between two boundaries is assessed subject to its maximum load,while the initial and tar-get points are moving boundary.Considering the fact that the most important application of cable robots is load carrying between two boundaries,planning the optimal path in which the heaviest load can be car-ried is extremely applicable.A closed loop optimal path planning algorithm is proposed in this paper for non-linear dynamic of a cable robots based on opti-mal feedback linearization.This method not only pro-duces the optimal path of the end-effector,but also is robust to external disturbances and parametric uncer-tainties as a result of its closed loop nature.Moreover, considering the fact that in many automation applica-tions the target of load handling is a sort of moving boundary like conveyors,finding the optimal point of this boundary which produces the optimal path with the maximum dynamic load carrying capacity(DLCC) amongst the other points of the boundary is obviously a useful study.Therefore,an online solution,based on variational algorithm is proposed here to solve the moving boundary problem which is compatible with M.H.Korayem(B)·H.Tourajizadeh·A.Zehfroosh·A.H.KorayemRobotics Research Laboratory,Center of Excellencein Experimental Solid Mechanics and Dynamics,School of Mechanical Engineering,Iran Universityof Science and Technology,Tehran,Irane-mail:hkorayem@iust.ac.ir the presented closed loop optimal path planning.This method is developed for both the initial andfinal mov-ing boundaries.Finally maximum DLCC is obtained using an iterative method to check the optimality of the proposed method.The efficiency of the proposed algo-rithm is verified at the end by the aid of some simulation scenarios performed on a spatial six DOFs cable robot with six cables.The motors’torque,motors’speed,and resultant DLCCs are calculated for both simple optimal path and moving boundary cases and comparison of the results proves the mentioned claims based on superior-ity of the proposed algorithm of moving boundary in saving the energy and increasing the DLCC.All sim-ulation results are supported by conducting an experi-mental study on the cable robot of IUST(ICaSbot)for regulation movement of the end-effector with moving boundary.Keywords Optimal regulation·Moving boundary·Cable suspended robot·Feedback linearization control·Dynamic load carrying capacity1IntroductionCable robots are considered as a modified version of cranes in which carrying loads can be controlled bet-ter within its predefined trajectory or point to point movement.Therefore,finding the maximum load car-rying capacity and its optimal path is definitely a useful research for industrial environments.However,in order1516M.H.Korayem et al.to neutralize the destructive effect of load swinging, which is common for under constrained cable robots, closed loop optimal control seems to be necessary.As a result not only the stability of the end-effector is assured,but also the optimal path is tracked and so the heaviest load is carried along.To meet this goal a nonlinear controlling algorithm needs to be com-bined with a proper optimizing method.The objec-tive function of this paper should be defined based on required constraints related to maximizing the pay-load.Two dynamic constraints are supposed to be min-imized in this paper including allowable accuracy of the robot,and allowable torque of the motors while the constraint of positive tension of the cables is supposed to be satisfied since the robot is maneuvering within its allowable dynamic workspace.Moreover,another geo-metrical constraint for special applications of robots in automation process is considered here which let the system to have even more load carrying capac-ity.In many robotic applications like automation lines, the exact position of the boundary points of the end-effector are not definitely determined since the load can start or end its movements on a line or a curve which is the conveyor profile of the automation line. This line or curve is called moving boundary of the optimal path.The initial condition of the robot can also be moving boundary in some applications.It is desired that the robot chooses the optimal point of this initial orfinal moving boundaries which results in the maximum load carrying capacity.In many automation processes,the gripping and manipulating speed and the speed of placement of the particles on the conveyor is considerably less than the speed of the conveyor.More-over,since the speed of the conveyor is simply control-lable by the aid of an operator,it is always possible to provide a free space on the conveyor through which the particle can be placed in.Thus,it is always pos-sible to have a free space boundary on the conveyor as the start or end point of the robot’s end-effector for which the optimal point can be determined.Therefore, the particle is replaced with considerably less energy while no malfunctionality is occurred on the process of the automation since all of the points of the con-veyors eventually are led to a unique destination.The main purpose of this paper is tofind out the optimal path of the cable robot and its corresponding maxi-mum DLCC between a definite or moving initial point and a moving boundaryfinal point in a closed loop way.Some researchers have been performed in this area so far.The initial researches of optimizations related to the DLCC of the robots are conducted using open loop approaches like Hamilton–Jacobi–Bellman(HJB) method which were not robust to parametric uncertain-ties or external noises.For example,open loop opti-mal control of a spatial cable robot is done by Alp for a six DOFs cable robot with six cables[1]and by Williams for two samples of planar cable robots [2]in order to minimize the cables tension.Applica-tions of cable robots made researchers study differ-ent aspects of them such as dynamic modeling,con-trol strategies,load carrying capacity,accuracy and also designing more efficient cable robots.For exam-ple,Pott et al.introduce a new version of cable driven robot,IPAnema,that has more applications for indus-trial processes[3],or Merlet studied a redundantly actu-ated robot with eight cables[4].Moreover,stability of underconstrained cable driven robot is studied in [5].Accuracy of cable robot while carrying payload, which is one of their important application,is stud-ied and improved by Pott and co-workers[6].Opti-mizing the DLCC of a six cable robot is done by[7] using open loop variational approach.Iterative linear programming(ILP)method is employed by Korayem et al.[8]for the same cable robot in order to maxi-mize the payload of the system.Moreover,the men-tioned cable robot with elastic characteristics is opti-mized in[9]using open loop optimization approach. Considering the fact that in open loop approaches the robustness of the system to disturbances and uncertain-ties is not guaranteed,some algorithms were developed which planed the optimal path under the control of a closed loop system with different objective functions. For example feedback linearization method is used in [10]in order to optimal distributing of cables’tension for a constrained sample of a cable robot by Fang et al.Trevisani has also optimized a constrained sample of cable robot to achieve the minimum cables’tension [11].Optimization of tracking accuracy of a cable robot is performed in[12]using adaptive controller.PD con-troller is used in[13]in order to minimize the motors’torque.Maximizing the load capacity of cable robots as the desired objective function is considered in[14]for a predefined trajectory withflexible joints.Also DLCC of a crane is optimized in[15–17]for crane applica-tions using robust controller.State dependent Riccati equation(SDRE)is used in[18]to optimal control of aflexible cable transporter system while the stabilityOptimal path planning of a cable-suspended robot with moving boundary1517is guaranteed by robust H-infinity method.The same method(SDRE)is used by Korayem and Zehfroosh for optimal motion planning of cable robot in the pres-ence of obstacles and moving boundaries[19]which is nonlinear with high calculation process and is not proper for real time applications.Korayem and Toura-jizadeh focused on obstacle as a constraint of optimal path planning and proposed a proper strategy to avoid collision and combined this strategy with adaptive opti-mal feedback linearization approach[20].The fact that in some industrial environments the boundaries are not determined as a point,the idea of extra optimization of the robots was ignited in[21]for moving boundary cases but in an open loop way.However,something has not been done yet which is necessary to be considered.In this paper,the lack of [21]i.e.,its open loop nature,is improved.The opti-mal path of a spatial under constrained cable-suspended robot which acts under the control of a closed loop con-troller is assessed while its initial and target points are moving boundary and their related maximum DLCC are also calculated.This goal is satisfied in this paper by designing a closed loop optimal strategy combined of feedback linearization controlling method which is a proper controlling strategy for non-linear systems, together with optimizing tool of LQR(linear quadratic regulator)which is a strong optimizing algorithm of linear systems.Destructive effects of nonlinearity of the plant are neutralized by exact linearizing the sys-tem using feedback linearization method.Therefore, stability of the system is guaranteed by Lyapunov and optimality and robustness of the closed loop plant is provided by LQR which has an acceptable phase and gain margins.Thus,contrary to the open loop optimal path planning approaches,not only the optimal path is found in an online way,but also the procedure is robust against any kind of external disturbances and paramet-ric uncertainties since the optimal path is tracked using the actual position feedback of the end-effector.More-over,to solve the moving boundary problem in thefinal point,a geometrical based method is proposed accord-ing to variational approach,whichfinds the optimal point of any kind of moving boundaries consisting of straight line,curve or surface shaped boundaries for a closed loop system with a fast calculation capabil-ity which is suitable for online processes.Therefore,a complementary algorithm is attached to the designed optimal controller and a method is derived tofind the instantaneous optimal point of the moving boundary in an on line way.This point is fed to the controller as the online setpoint to minimize the consumed energy.Con-sidering the fact that the optimal path of the end-effector is not a straight line,the optimal point is not a constant target and varies during the regulation process.An iter-ative method is also proposed tofind the optimal point of moving boundary at the starting point.Moreover, the effect of gravity on the moving boundary is studied and the efficiency of the proposed moving boundary strategy at thefinal and initial points is compared.First of all,the non-linear formulation of parallel cable robot are represented and then feedback lineariza-tion is implemented which converts the dynamic into linear state space.Secondly,the proposed closed loop control algorithm is optimized based on LQR.After-ward,the employed iterative algorithm of calculating the maximum load carrying capacity of this system is portrayed based on an objective function consist-ing of end-effector’s error and motors’torque.Finally, the geometrical constraint of DLCC which isfinding the optimal point of a moving boundary is then real-ized by proposing a complementary variational based strategy forfinal point while an iterative method is derived for initial moving boundary.The efficiency of the designed controller and also the proposed algo-rithm of moving boundary problem are verified by the aid of a series of simulation studies done on a spa-tial six DOFs under constrained cable robot and com-paring the results between the simple system and the one which is equipped by moving boundary strategy. Four different categories of moving boundary problems are studied in this paper including straight line mov-ing boundary,curve and surface shaped samples and finally a generalized case in which both of initial and final points are moving boundaries.The superiority of the closed loop over open loop approaches,the effect of gravity and involved DOFs,differences of initial and final moving boundaries and the relation between the torque changes and the distance of thefixed setpoint to the optimal one which is calculated by the aid of moving boundary strategy is also investigated in this section.The related optimal DLCC is calculated then and the effect of the proposed algorithm on this objec-tive parameter is analyzed.DLCC is calculated using an iterative method with an analytic approach which is secure from numerical problems or local optimiza-tion syndrome.The effect of the proposed method on the torque and optimal path and eventually its related DLCC is investigated.At the end,all of the theoreti-1518M.H.Korayem et al.cal claims and simulation results are verified by com-paring them with experimental studies which are con-ducted on the Iran University of Science and Technol-ogy Cable-Suspended Robot(ICaSbot).This robot is an under constrained spatial cable robot with six degrees of freedom and six active cables.The good compatibil-ity of the simulation and experimental results validates the correctness of the proposed algorithm and the opti-mality of the proposed moving boundary strategy is practically investigated.2Optimal feedback linearization formulation Formulation of optimal path planning between two points in a closed loop way and defining its DLCC is presented in this section.The moving boundary con-dition is solved as a new constraint of optimization.2.1Dynamic and optimal control schemeThe“n”notation presents the global coordinate of the robot while the“b”presents its local one.Dynamic equation of an under constrained cable-suspended robot with six DOFs and six supporting cables of Fig.1 can be described as Eq.(1)[1]:D(X)¨X+C(X,˙X)˙X+g(X)=S T J(q(X))T;X={x m,y m,z m,ϕ, ,ψ}(1)where X is the vector of translational and rotational DOFs of the end-effector,T is the tension vector oftheFig.1Spatial sample of cable robot[1]cables,q is the length of the cables m is the load of the end-effector and I is the moment of inertia of the end-effector.Also we have:D=m I300P T I P;C=03P T{I˙P˙o+(P˙o)×I(P o)};g=⎡⎢⎢⎣−mg03⎤⎥⎥⎦;S J=∂q i∂x ji×j;P=⎡⎣10−sinθ0cosψsinψcos0−sinψcosψcos⎤⎦;˙o=⎡⎣˙˙˙ϕ⎤⎦D is the inertia matrix of the robot;C and g are its Cori-olis matrix and gravity vector respectively and S J is the Jacobian matrix.According to[22]using feedback linearization method results in the following required cables’tension and motors’torque:T i=S−T J(D(X)ν+C(X,˙X)+g(X))i⇒τi=r S−T J(Dν+C+g)+J¨β+c˙β;i=1,...6(2) where J is the rotary inertia of the motor,r is the radius of the drum,˙βis its angular velocity,c is the viscose damping of the motor andνis the control input of the outer closed loop of feedback linearization and can be evaluated as below to create a controllable error equa-tion which can be stabilized using LQR:νi=¨X d+K i D(˙X d−˙X a)+K i P(X d−X a);i=1,...,6(3) where K i D and K i P are controlling gains of deriva-tive and proportional errors respectively and should be optimized in order to have an optimal regulation[22]. Indeed,outer closed loop controlling signal deals with converting the non-linear state space of the robot into linearized closed loop state space which can be opti-mized using LQR,while the inner closed loop con-trolling signal is related to calculating the optimized required motors’torque.Based on Eqs.(2,3),the non-linear state space of the cable robot,is converted into linear one which can be stabilized and optimized using proper controlling gains by the aid of LQR.The control procedure can be shown in Fig.2.Since the related state space is linearized,it is pos-sible to use LQR to optimize the controlling gains.ToOptimal path planning of a cable-suspended robot with moving boundary1519Fig.2Control procedure of the robot based on optimal feedback linearizationachieve this goal,the constraints which are involved in optimizing the objective function should be deter-mined.Two main constraints of calculating the DLCC of a robot including required motors’torque and track-ing error are supposed to be minimized by the aid of LQR method in order to obtain the maximum load capacity.So,the cost function can be defined as below:J L Q R (X ,t )=∞t(e r (X ,t )T Qe r (X ,t )+u (X ,t )T Ru (X ,t ))d τ(4)where e r is the error of the state space of the system,Q is the penalty matrix of accuracy,R is the penalty matrix of control input and u is controlling input.Solv-ing this cost function results in the Ricatti equation in which its stability is also assured by the aid of Lyaponov Equation [23].Finally solving the mentioned Riccati equation results in the following optimal control input:u ∗=−R −1B T Se r (X ,t )=−R −1B T S [e ;˙e](5)where e and ˙e are the error of position and velocityrespectively,S is the resultant of Riccati equation and B is the controlling matrix of the linearized state space.This obtained optimal value u ∗should be substituted in the last two terms of Eq.(3)to calculate the linearized optimal controlling input.νio=¨X id −R −1B T Se r (X ,t )⇒τio =r S −T JD ¨X id −R −1B T Se r (X ,t ) +C +g +J ¨β+C ˙β;i =1,...6(6)In a regulation process the setpoint is constant so,wehave ¨Xd =0.Also other matrices of the controlling vector in a regulation process should be substituted using feed forward terms of inverse dynamics.Thus,by optimizing the controlling gains,whole the controlling input will be optimized and the resultant path which is tracked by this control signal will be the optimum one:X o =1D (X ) −C (X ,˙X )˙X −g (X )+S J J −T (D (X )(v o )+C (X ,˙X )+g (X ))d t (7)where X o is the optimal path and v o is the optimalcontrolling signal.As a result,a closed loop optimal path planning is provided using feedback linearization together with LQR,by which both the optimality and stability are provided.The moving boundary constraint is also satisfied in the next section.2.2DLCC formulationIn this section,the goal is to define the optimal DLCC of the robot based on the motors’torque constraint,accuracy constraint and moving boundaries constraint.Considering the fact that for an under constrained cable robot there is no remedy to guide the end-effector along a path with negative cable’s tension,the positive ten-sion of the cables are supposed to be satisfied since the robot is considered to be operating within its allowable dynamic workspace.In [14]the required iterative method was presented to find the DLCC of a robot based on torque and error1520M.H.Korayem et al. Fig.3Flowchart ofdetermining the DLCC of aclose loop cable robotconsidering movingboundaryconstraints.This method is modified for the closed loop form and considering boundary constraint.Thefinal algorithm can be explained like theflowchart of Fig.3. The maximum DLCC is estimated by the aid of an itera-tive procedure.In this closed loop approach,the torque and accuracy constraints should be satisfied simulta-neously afterfinding the optimal point of the moving boundary in order to extract the maximum DLCC.The payload of the system after defining the optimal point of the moving boundary is increased gradually in an iteration loop as long as thefirst constraint is violated. The penalty gains of error and controlling input in the objective function of Eq.(4)should be set by the aid of LQR in a way that result in simultaneous satura-tion of torque and accuracy to have the highest DLCC. So,the procedure in each iteration,is a pure analytic approach which is applicable in online regulation and is secure from numerical problems or local optimiza-tion syndromes.It is good to note that,only the process offinding the maximum DLCC is iterative,and this process do not affect the proposed optimal closed loop control method described in Sect.2.2and Fig.3.Thus, the proposed optimal path planning process with mov-ing boundary and regulation method of control proce-dure is completely on-line which is safe from iterative destructive effects.2.2.1Allowable motors’torque and accuracyconstraintsThe constraints for estimating the DLCC includes two dynamic constraints i.e.,allowable motors’torque and allowable accuracy of the end-effectors and a geomet-rical constraint which is moving boundary condition of the end-effector.The motor torque constraint restricts the applied torque within the allowable bounds of the motor and accuracy constraint restricts the end-effector within its predefined allowable error bounds which should be defined by the operator.The coefficient of these two constraints and their effects on the DLCC of the robots are studied in[14].Optimal path planning of a cable-suspended robot with moving boundary 15212.2.2Straight line moving boundaryIn this section it is supposed that the second bound-ary of the optimal path is not a determined point and is substituted by a line.It is expected that the designed optimal controller finds its optimal way toward the spe-cial point of this moving boundary for which the max-imum load capacity is achieved.A typical sample of this situation is the automation lines in which the grip-per is supposed to transfer the product from a specific initial point toward a point on the conveyor line which can be treated as the moving boundary.Considering the fact that the destination of all of the points of the moving line in a conveyor is a unique target,the loca-tion of the second point is not important for the object.However,choosing the point of the automation line for which the heaviest load can be carried is a privilege.It is shown in [21]that whenever an objective func-tion (F (t ,y 1,y 2...,y n ,y 1,y 2,...,y n ))like Eq.(8a )is supposed to be optimized and its final point is a mov-ing boundary (g (t ,y 1f ,y 2f ,...y n f )),the condition of Eq.(8b )should be satisfied based on variational prin-ciple:I =BAF (t ,y 1,y 2...,y n ,y 1,y 2,...,yn )d t ;yi =d y i /d t (8a)F −n i =1y i ∂F ∂y i t =t f δt f + n i =1∂F ∂yi t =t fδy i f =0(8b)where y 1,...,y n are the DOFs of the end-effector.Forthe closed loop condition in which the objective func-tion of LQR is supposed to be satisfied,and considering the paths with the same time duration (δt f =0)substi-tuting the LQR objective function in the above equation results in:6 i =1∂F∂X i δX f =0;X =[x ;y ;z ;ψ;θ;φ](9)where X f is the coordinate of the final point of the end-effector on the moving boundary.The mentioned equa-tion should be solved to find out the optimal point of the moving boundary which needs slightly a heavy cal-culation.However,based on the mentioned proposed controlling strategy in which the motors’torque are defined based on feedback linearization and are opti-mized based on LQR,the functional of LQR (Eq.(4))can be rewritten as Eq.(12)in which the controlling input is substituted by Eq.(6).According to Eqs.(2,3)we have the following error equation for the closed loop system:¨e i +K D ˙ei +K P e i =0;i =1,...6⇒e i =e λj t;λj = −K i P +− K 2i P −4K i D /2(10)Thus:˙e i = λj e λj t ⇒˙e=f (e )(11)And so,the objective function is purely a polynomial function of single term of DOFs error:F (X ,t )=e r (f (e ))T Qe r (f (e ))+(K i D (f (e ))+K i P (e ))TR (K i D (f (e ))+K i P (e ))F =f (e )⇒e →min(12)where e r is the vector including e and ˙e .Base on Eq.(8),time (t)is the independent variable,error and itsderivatives are the dependent variables (y =e ;y =˙e).Substituting the above functional in Eq.(8)and con-sidering the fact that the error’s derivative are also a function of error vector,illustrate that the error vector needs to be minimized in order to satisfy the moving boundary condition and obtaining the minimal motors’torque.It means that based on the proposed regulation process the strategy of finding the optimal path is eas-ier with less calculation process which is applicable for on-line robotic applications.In other words,it is math-ematically proved that in order to find the optimal point of a moving boundary it is sufficient to find the nearest point of the moving boundary to the instantaneous posi-tion of the end effector for each time interval instead of solving the heavy calculation of the Eq.(9).The nearest point of the moving boundary doesn’t remain a unique point during the whole period of end-effectors’movement since the optimal path of a non-linear system for a determined target point is not a straight line and changes during the time based on the objective func-tion which itself is a function of non-linear dynamics of the robot.Therefore,the instantaneous setpoint of the end-effector is not constant and should be calculated versus the time.Also,as it was proved,the nearest point should be found respect to this actual position of the end-effector since whole the objective function for the proposed regulation strategy is a function of error.As a result of minimizing the mentioned objective function,controlling input which is the motors’torque is mini-mized together with the state error which is related to the end-effector displacement or motor speed.Thus,the power which is the multiplication of these two parame-ters is minimized by the proposed optimal regulation1522M.H.Korayem et al. with moving boundaries which consequently results inoptimizing the consumed energy.Three different cases are considered for the movingboundary problem.First a straight line is assumed as anopen loop curve of moving boundary.In order to definethe nearest point of this line with respect to instanta-neous position of the end-effector,it is sufficient tofindthe orthogonal projection of the instantaneous positionof the end-effector on the moving boundary line(X f):X f=X1l+ 3j=1((−(X2l(j)−X1l(j))∗(X1l(j)−X e(j)) 3j=1(X2l(j)−X1l(j))2∗(X2l(j)−X1l(j));X={x;y;z;ϕ;θ;φ}(13) where X1l and X2l are the initial andfinal points of the straight moving boundary line,X e is the instantaneous position of the end-effector and X f is the instanta-neous optimal setpoint of the end-effector on the mov-ing boundary.Since the moving boundary is not a line but a segment of a line as an open loop curve,the cal-culated setpoint can be located within the segment or along it.This fact affects on the choosing the instanta-neous setpoint of the end-effector.To verify this prob-lem it should be considered that if the following condi-tion is satisfied,the setpoint is within the segment of the line and therefore,can be treated as the instantaneous setpoint of the end-effector:(X f−x1l)(X f−x2l)<0(14) Otherwise,if the above condition is not satisfied,the setpoint is out of the line segment or along the line. In this situation the nearest point to the instantaneous position of the end-effector which should be considered as the new setpoint is one of the two end-sides of the line segment.Therefore,it is sufficient to calculate these two distances and choose the shorter one as the new setpoint of the end-effector.Given the mentioned explanations,it is required to update the setpoint of the regulation process based on the moving boundary strategy to feedback the nearest optimal point of the moving boundary to instantaneous position of the end-effector as the desired setpoint.This new setpoint should be calculated using the instan-taneous position of the end-effector thus,this updat-ing needs the actual position of the end-effector which should be provided by the aid of sensors.Thus,this upgrading should be performed in each time interval of controlling procedure which depends on the sam-pling rate of the installed sensors.In the experimental study(and also simulation),the sample rate is consid-ered0.01second so,the upgrading rate of the setpoint is done each0.01second.(Encoders are2400pulse per revolution and camera is24frames per second). The strategy of defining the optimal setpoint is shown in Fig.4for eachcase.Fig.4Methodology offinding the instantaneous optimal setpoint for straight line(left)and curve(right)。