A time-dependent numerical model of the mild-slope equation
Protecting coherence in Optimal Control Theory State dependent constraint approach

ˆ (t) backward in time in time and the target operator B [11, 12, 13]. The prospect of quantum computing has posed an even more complex control problem: imposing a unitary transˆ on a subset of quantum states which act as formation U the quantum register. The unitary transformation carries out a specific computational task. This control task is equivalent to N simultaneous state-to-state transformations [6, 14, 15]. The solution of the iterative set of equations has been shown to become exponentially more difficult with the size N of the unitary transformation [6]. These findings are in accordance with a very complex control landscape [16]. A further step up in complexity is the task of imposing a unitary transformation under dissipative conditions. This task emerges in the quantum governor [17], in quantum information processing and it is a traditional task in nuclear magnetic resonance (NMR) spectroscopy [18]. In any practical implementation the positive task of obtaining the final goal has to be weighted by possible negative consequences. For example control fields of high intensity can damage the system by causing ionization or dissociation. A remedy for this problem consists in restricting the population in certain lossy excited state manifolds. This task has been the motivation for the development of local control theory (LCT) [19, 20]. LCT has been applied to lock unwanted electronic excitations [21] and recently to the problem of quantum information processing where avoiding population loss becomes crucial [22, 23]. However, OCT is more powerful than LCT and it is therefore desirable to incorporate constraints describing negative consequences of the control process into the algorithm. Such constraints depend on the state of the system at intermediate times [24, 25, 26, 27]. For example, the system can simply be restricted to remain in an “allowed” or to avoid a “forbidden” subspace during its evo-
2019年国家科学技术奖提名项目公示内容(自然科学奖)

附件:2019年国家科学技术奖提名项目公示内容(自然科学奖)项目名称: 海洋天然气水合物分解演化理论与调控方法提名者:谈和平,哈尔滨工业大学,教授,工程热物理一、提名意见二、项目简介(限1页)天然气水合物是最具开采价值的新型清洁能源,我国南海储量达800亿吨油当量,是我国石油与天然气已探明储量的总和,实现天然气水合物资源开发是我国重大战略需求。
天然气水合物开发过程存在水合物分解相变复杂、热质传递困难、储层胶结强度弱化显著等问题,导致水合物分解产气效率低、持续性差,甚至引起储层失稳等重大安全风险,因此实现其安全高效开采是世界性难题。
该项目在国家自然基金重点项目、973计划、国家科技重大专项等项目支持下,针对水合物分解多孔介质内复杂相态转化理论、含相变过程多相多组分运移机制、储层胶结强度弱化及其与海底结构物(井筒、桩基础等)相互作用机理等关键科学问题,开展了十余年的研究,取得了以下主要突破和科学发现:1. 发现了海洋天然气水合物分解相态转化-多相渗流-胶结弱化规律,建立了水合物分解运移与储层变形演化理论。
建立了海洋多组分体系水合物相平衡方程,突破了传统热力学模型的理论局限;首次发现了水合物分解亚稳态纳米气泡富集现象,认识了分解过程水合物再生成逆反应的内在本质;发现了微孔隙内水合物赋存形态转化特性,提出了水合物相变多相渗流模型,构建了水合物分解气、水运移理论框架;发现了水合物储层粘聚力随水合物分解的衰减规律,揭示了水合物储层变形过程中胶结结构的演化机制。
2. 揭示了海洋天然气水合物分解驱动与失稳机理,提出了水合物分解强化与储层安全调控方法。
发现了天然气水合物分解存在压差驱动-显热主导-传热控制表观动力学演化三历程,提出了压-热联调强化水合物分解方法;首次发现了二氧化碳水合物具有更高的抗变形能力,创造性地提出注二氧化碳强化储层结构强度方法;建立了水合物储层与结构物相互作用模型,确定了水合物分解对海底结构物的影响边界。
F_Staquet
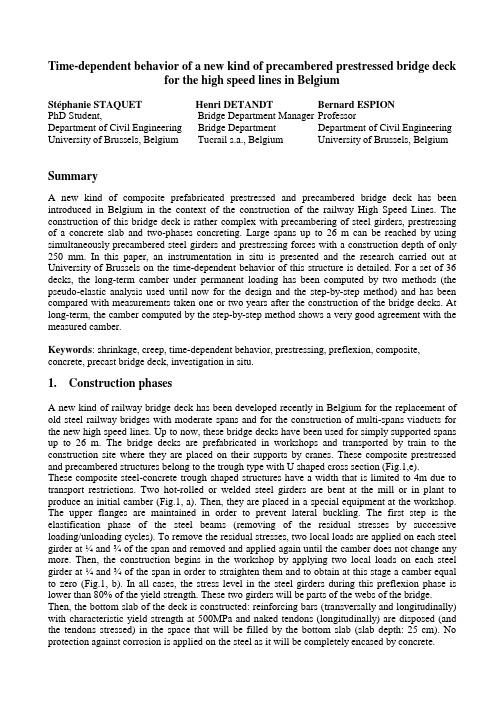
Time-dependent behavior of a new kind of precambered prestressed bridge deckfor the high speed lines in BelgiumStéphanie STAQUET Henri DETANDT Bernard ESPIONPhD Student, Bridge Department Manager ProfessorDepartment of Civil Engineering Bridge Department Department of Civil Engineering University of Brussels, Belgium Tucrail s.a., Belgium University of Brussels, Belgium SummaryA new kind of composite prefabricated prestressed and precambered bridge deck has been introduced in Belgium in the context of the construction of the railway High Speed Lines. The construction of this bridge deck is rather complex with precambering of steel girders, prestressingof a concrete slab and two-phases concreting. Large spans up to 26 m can be reached by using simultaneously precambered steel girders and prestressing forces with a construction depth of only 250 mm. In this paper, an instrumentation in situ is presented and the research carried out at University of Brussels on the time-dependent behavior of this structure is detailed. For a set of 36 decks, the long-term camber under permanent loading has been computed by two methods (the pseudo-elastic analysis used until now for the design and the step-by-step method) and has been compared with measurements taken one or two years after the construction of the bridge decks. At long-term, the camber computed by the step-by-step method shows a very good agreement with the measured camber.Keywords:shrinkage, creep, time-dependent behavior, prestressing, preflexion, composite, concrete, precast bridge deck, investigation in situ.1. Construction phasesA new kind of railway bridge deck has been developed recently in Belgium for the replacement ofold steel railway bridges with moderate spans and for the construction of multi-spans viaducts forthe new high speed lines. Up to now, these bridge decks have been used for simply supported spansup to 26 m. The bridge decks are prefabricated in workshops and transported by train to the construction site where they are placed on their supports by cranes. These composite prestressed and precambered structures belong to the trough type with U shaped cross section (Fig.1,e).These composite steel-concrete trough shaped structures have a width that is limited to 4m due to transport restrictions. Two hot-rolled or welded steel girders are bent at the mill or in plant to produce an initial camber (Fig.1, a). Then, they are placed in a special equipment at the workshop. The upper flanges are maintained in order to prevent lateral buckling. The first step is the elastification phase of the steel beams (removing of the residual stresses by successive loading/unloading cycles). To remove the residual stresses, two local loads are applied on each steel girder at ¼ and ¾ of the span and removed and applied again until the camber does not change any more. Then, the construction begins in the workshop by applying two local loads on each steel girder at ¼ and ¾ of the span in order to straighten them and to obtain at this stage a camber equalto zero (Fig.1, b). In all cases, the stress level in the steel girders during this preflexion phase is lower than 80% of the yield strength. These two girders will be parts of the webs of the bridge.Then, the bottom slab of the deck is constructed: reinforcing bars (transversally and longitudinally) with characteristic yield strength at 500MPa and naked tendons (longitudinally) are disposed (andthe tendons stressed) in the space that will be filled by the bottom slab (slab depth: 25 cm). No protection against corrosion is applied on the steel as it will be completely encased by concrete.Fig.1 Construction phases of a U-bridge deckThe bottom slab is then concreted (grade C60) some hours after the preflexion of the steel beams and the lower flanges of the girders are encased (Fig.1, c). The bridge decks prestressed at a very early age are heated at 45°C during the first day after casting. At 40 hours (for the decks with heat cure) or 62 hours (mainly for the non heated ones when the slab concrete strength is higher than 45MPa on 150 mm x 150 mm cubes) of age, the bottom slab is prestressed by releasing the preflexion of the girders and transferring the prestressing force from the tendons (Fig.1, d). On the following day, the remaining naked upper parts of the steel girders are enclosed in a 2nd phase concrete to complete the webs (Fig.1, e). This kind of deck has been designed, among other reasons, to minimize the construction depth and the erection time on site and also to enhance the fatigue strength.2. Computational methodsPrestressing is transferred at an early age (40 or 62 hours) and at high stress levels (around 0.5 f c, ) on high strength concrete (f c, cube = 45MPa at the age of transfer). The composite character of cubethe construction, with the association of the steel of the girders (S355), the steel of the prestressing tendons (grade 1840 MPa) and the two-phases concreting should also be noted. All this induces theoretically a significant time-dependent redistribution of internal stresses between steel and concrete. Nearly 400 of these bridge decks have now been constructed since ten years and seem to perform according to expectations [1,2]. Until now, this new kind of bridge deck has been designed with a simple classical computation method where the time-dependent effects are taken into account within the framework of a pseudo-elastic analysis with a variable modulus method. The modular ratios (m = steel modulus of elasticity/concrete modulus of elasticity) are computed according to an empirical formula given in the Belgian Standard NBN5 (1988): m = 5.59 after transfer of the prestressing force from the tendons (instantaneous value); m = 9.05 for permanent loads (long-term value) and m = 4.97 for variable loads (instantaneous value). Its application to this problem gives only approximate results. In this research, we have used the age adjusted effective modulus (AEMM) method and the step-by-step method [3] to evaluate the time-dependent behavior of the bridge decks. These methods take explicitly into account the creep and the shrinkage of theconcrete. In the numerical simulations with the AEMM method and the step-by-step method, the CEB-MC90 model for predicting the time-dependent deformations of concrete has been used. Actually, an extensive experimental program has been conducted in laboratory in order to evaluate finely the time-dependent properties of the concrete by means of creep and shrinkage tests. The concrete (grade C60) formulation is identical for both phases: sand (from Maas river, 0/5): 715 kg/m³; aggregates (crushed limestone, 7/14): 1140 kg/m³; Portland cement (CEM I 52.5 R LA, ASTM III and class 3 CEB-MC90): 380 kg/m³; total water: 137 liters/m³; water reducing admixture (Visco 4): 7 kg/m³. The creep and shrinkage curves recorded in the laboratory have been compared with predictions obtained by several models. For most of the creep and shrinkage tests, the prediction model from the CEB-MC90 [4] best represents the shrinkage and creep deformations of this particular concrete C60 [5]. The tension loss by relaxation in the tendons has been evaluated according to the method proposed by Ghali and Trevino [6].3. Instrumentation and comparison between computed and measured strainsA simply supported bridge deck with 26 m span and prestressed at 62 hours belonging to a viaduct constructed at the entrance of Brussels South Station has been instrumented at the third of the span and at mid span. Resistive strain gages have been bonded on the steel girders and vibrating wire gages have been embedded in the concrete. Strains have been recorded since the construction of the deck in June 2000. The reference of the strain measurements is taken just before the preflexion of both steel girders. The loading history proceeded as follows: concreting of the bottom slab took place between 6 and 9 hours after preflexion; prestressing occured at t = 2.5 days; concreting of the webs (2nd phase concrete) took place at t = 4 days; the deck was first stored in the prefabrication yard, then transported by rail near the construction site; the deck was placed on temporary supports (at 1/5, 4/5 of span) between t =10 and 45 days; the deck was placed on its final bearings at t = 45 days; the ballast was placed in two stages at t = 270 days and at t = 305 days; in June 2001, the viaduct was opened to service. Strains and stresses have been computed in the following situations: (a) just after preflexion of the steel girders, (b) just after transfer of the prestressing force from the tendons, (c) when the bridge deck is supported on temporary bearings, (d) when the bridge deck is supported on its final bearings, (e) after the placement of the ballast and (f) under self-weight and the weight of ballast at long-term. The strains and stresses computed by the classical design method (NBN5) are indicated by the black squares in figures 2 and 3. In figure 2, strains recorded by the vibrating wire gages (TS8 to TS11) are also indicated. The external relative humidity used in the computations is set to 80%.Figure 2 illustrates the strains in the 1st phase concrete in the slab at the third of the span. At long-term, strain values computed by the classical design method (NBN5) are quite different from the measurements whereas the values computed by the AEMM method and by the step-by-step method show a much better agreement with the measurements. In particular, the best agreement between strains measured on the instrumented bridge deck and the computed values is found with the step-by-step method. The step-by-step method evaluates more finely the time-dependent redistribution between steel and concrete than the age adjusted effective modulus method.However, after the placement of the deck on its final bearings (t>45 days), the time-dependent effects are overestimated by both methods (AEMM and step-by-step). One reason among others explaining this effect could be the hypothesis of a constant relative humidity assumed by both methods. In fact, the bridge deck undergoes a variable history concerning its waterproofing. After the placement on its final bearings, some parts of the slab and the webs are waterproofed. Therefore, the boundaries conditions for the desiccation change with time. In the parts where the internal relative humidity is the highest, the creep and shrinkage strains will be lower than the strains near non waterproofed surfaces.Figure 3 illustrates the computed stresses for the concrete in the slab. No tension appears neither with the simple classical computation method (NBN5) used until now for the design of these bridge decks nor with the more advanced analysis methods. But, the simple classical computation method underestimates the prestressing losses on the slab.4. Analysis of the camber at long-termHereafter, the comparison between cambers measured in situ and cambers computed by the step-by-step method and the classical design method (NBN5) for 36 typical railway bridge decks will be presented. The long-term cambers at mid-span of the 36 bridge decks have been computed under permanent loading conditions. They are compared with long-term cambers measured between 1 and 2 years (depending of the available data). Note that in this paper, camber means an upwards or negative permanent deflection. X1 is the relative difference between the long-term measured camber and the long-term camber computed by the NBN5 design method. The histogram given in Figure 4 shows the statistical distribution of the variable X1. The minimum, mean, maximum and standard deviation values of the distribution are respectively (in %): -67.68, -41.55, -16.66 and 11.62. Clearly, this computation method does not provide a good estimation of the long-term camber. The NBN5 method simply uses a variable modular ratio to take into account the time-dependent effects. At long-term, creep and shrinkage of concrete have a significant effect on the camber. It is necessary to evaluate more finely the time-dependent effects of concrete and specially the stress redistribution between concrete and steel to improve the accuracy of the predictions at long-term. For that purpose, we have selected the step-by-step method to compute the cambers at long-term.[(measured camber-computed camber by NBN5 method) / measured camber] (in %) [(measured camber-computed camber by step-by-step method) / measured camber] (in %)Fig. 4 Distribution of the statistical variable X1 Fig. 5 Distribution of the statistical variable X2 X2 is the relative difference between the long-term measured camber and the long-term camber computed by the step-by-step method. The histogram given in Figure 5 shows the statistical distribution of the variable X2. The minimum, mean, maximum and standard deviation values of the distribution are now respectively (in %): -15.86, -2.99, -10.81 and 5.09.A statistical analysis has confirmed that the type of girders, the age at prestressing and the type of cure has no significant influence on the variability of X2. In fact, at long-term, creep and shrinkage of concrete are the most significantly parameters affecting the value of the camber. It is necessary to choose the prediction model for creep and shrinkage that best represents the behavior of the actual concrete. In these simulations, the model has been selected on basis of test results made in laboratory. Moreover, the actual history of loading (taking into account temporary support conditions before placement of the bridge decks on their final supports) has been taken into account very accurately in the step-by-step method. At long-term, the step-by-step method provides a rather good agreement between the predicted values and the measurements.5. Conclusions and acknowledgementsWhen the extension and upgrading works of the Brussels South Station took place in the beginning of the 1990’s for the new high-speed lines, more than 3 km of viaducts with single track had to be built in an urban environment. Several specific requirements had to be taken into account for this project such as a minimal construction depth for the bridge decks. In order to meet them, an innovating solution was used: prefabricated prestressed precambered composite trough bridge decks for single track.For an instrumented bridge deck, we have seen that the measured strain values and the strain values computed within the framework of a rough pseudo-elastic analysis with a variable elastic modulus are quite different from measured strains, in particular 2½ years after construction. The values computed with the step-by-step method show a better agreement with the measured strains than the values computed with the age adjusted effective modulus method. The step-by-step method evaluates more finely the time-dependent redistribution between steel and concrete than the age adjusted effective modulus method. For a sample of 36 composite bridge decks, we have seen that one or two years after their construction, the step-by-step method provides a rather good agreement for the evaluation of the camber under permanent loading. However, these methods (AEMM and step-by-step) have some limitations. Among them, we would like to underline the average section behavior hypothesis in relation with the desiccation which implies that the relative humidity remains constant whereas the bridge deck goes through a variable history from the point of view of its waterproofing. This justifies our initial intention to evaluate more finely the time-dependent effects of concrete in such composite structures with variable loading history. The next part of this research will be a development of a numerical simulation that takes into account the local evolution of the bridge deck desiccation with time.Part of this research is financed by a grant funded by the Belgian National Foundation for Scientific Research, which is gratefully acknowledged. We also wish to thank our colleges O.Germain,C.Jadoul and the Companies RONVEAUX s.a. and TUC RAIL s.a. for their collaboration.6. References[1] COUCHARD I., DETANDT H., ‘‘Entrance of the high speed line in the Brussels SouthStation ’’, Proceedings of the 16th IABSE Congress, Lucerne, Switzerland, 2000.[2] VAN BOGAERT P., DE PAUW B., ‘‘Shear problems in precambered-prestressed bridgegirders ’’, Proceedings of the 6th International Conference on Short and Medium Span Bridges, P.H.Brett, N.Banthia & P.G.Buckland editors, Vancouver, Canada, 2002, pp.715-722.[3] GHALI A., FAVRE R., ELBADRY M., ‘‘Concrete structures: stresses and deformations’’,3rd ed., E&FN Spon, 2002.[4] CEB-FIP MODEL CODE 1990, Bulletin CEB, No. 213/214, Thomas Telford, 1993.[5] STAQUET S., DETANDT H., ESPION B., ‘‘Time-dependent behaviour of a railwayprestressed composite bridge deck ’’, Proceedings of the international conference Concreep-6@MIT, F.-J.Ulm, Z.P.Bažant & F.H.Wittmann editors, Elsevier, 2001, pp.373-378.[6] GHALI A., TREVINO J.,‘‘Relaxation of steel in prestressed concrete’’, PCI Journal,vol.30, n°5, 1985, pp.82-94.。
时域模型FUNWAVE与SWASH的对比研究
时域模型FUNWAVE与SWASH的对比研究白志刚;魏茂兴【摘要】In this paper,the bathymetry was applied in the comparison between two time domain wave models FUNWAVE and SWASH. The governing equations of each model were introduced. Both FUNWAVE and SWASH show a good agreement with the experimental measurement,while FUWAVE is a little better than SWASH in general. But SWASH is much faster than FUNWVE,which is believed to be more competitive in the practical use.%本文采用Berkhoff为验证缓坡方程的不同计算方法可信度所使用的地形,对基于Boussinesq方程的FUNWAVE和基于NS方程的SWASH两种时域模型进行了比较分析,通过与实测数据对比,结果显示两种模型都能达到较好的精度,整体上FUNWAVE略好于SWASH,但基于相同的模型设置,SWASH 运行速度远远快于FUNWAVE。
综合考虑两种模型的精度与运行速度,SWASH 模型被认为更具实用性。
【期刊名称】《港工技术》【年(卷),期】2013(000)006【总页数】3页(P4-6)【关键词】Berkhoff地形;时域模型;FUNWAVE;SWASH【作者】白志刚;魏茂兴【作者单位】天津大学建筑工程学院天津大学水利工程仿真与安全国家重点实验室,天津 300072;天津大学建筑工程学院天津大学水利工程仿真与安全国家重点实验室,天津 300072【正文语种】中文【中图分类】P731.22在各种可再生能源中,波浪能具有最高的能量密度,这使得波浪能发电的开发利用在电力市场上较之其他新能源更具发展前景。
非均质材料等效力、热分析综述
非均质材料等效力、热分析综述任懿;杨海天;汪春霆【摘要】实际工程问题中常会涉及非均质材料时间相关的力学、传热分析.这类问题的数值模拟具有重要的工程应用背景与理论探讨价值.一种直接的方式是分别考虑非均质材料组分的物理/几何特性,将问题在空间/时域离散后进行计算,这往往会导致计算量过大,甚至不可行.一个变通的策略是将非均质材料考虑成一种宏观均质材料,进行等效求解,从而大幅降低计算量.分别以粘弹性节理岩体及非均质线性瞬态热传导问题为研究对象,探讨了非均质材料时间相关的等效数值求解方法.【期刊名称】《功能材料》【年(卷),期】2013(044)006【总页数】5页(P761-765)【关键词】时域;非均质;粘弹性;瞬态热传导;材料【作者】任懿;杨海天;汪春霆【作者单位】中国电子科技集团公司第五十四研究所,河北石家庄050081;大连理工大学工业装备结构分析国家重点实验室,辽宁大连116024;中国电子科技集团公司第五十四研究所,河北石家庄050081【正文语种】中文【中图分类】TB3031 引言工程中经常涉及到非均质材料时间相关的力学和热学问题求解。
如粘弹性节理岩体、聚合物复合材料、水泥/沥青混凝土、生物体的肌肉、骨骼等的受力变形分析[1],又如泡沫金属、颗粒增强橡胶、纤维增强塑料、纺织品、层压板、功能梯度材料、超轻材料、仿生材料等的瞬态热传导分析[2]等。
非均质材料时间相关的力、热学分析,一般需进行数值求解。
如在数值计算过程中分别考虑各非均质组分的物理/几何特性,加之时域上的计算,将导致计算量过大,甚至难以承受。
一种变通的方法是采用某种等效方法,将非均质问题转化为一种宏观均质的等效材料/场进行求解,以期大大降低计算量[3]。
本文以粘弹性节理岩体及非均质材料线性瞬态热传导问题为背景,探讨了与时间相关的非均质材料等效分析的数值求解方法。
以下分别对相关的研究现状进行综述。
2 研究进展和现状2.1 粘弹性节理岩体的等效分析粘弹性节理岩体与时间相关的变形特性是相关建筑物基础、边坡、围岩、地下结构物设计与使用中必须计及的重要因素[1],粘弹性节理岩体的数值分析具有重要的实际工程应用价值[3](图1)。
identify sources

3 The mean cumulative number of failures, the Nelson Aalen estimate
The failure history for each system may be considered as a counting process, fN (t)gt T with N (t) denoting the cumulative number of failures at system age t. The censoring time T is the system age where observation of the system ceases, either because the system is taken out of operation, or - most often - T will simply denote the current age of the system. We shallewal Process, Repairable System, Mixed Exponential Lifetimes.
1 INTRODUCTION
The eld of quality control includes a wide spectrum of engineering disciplines such as robust design, robust construction, manufacturability, reliability, maintainability, destructability, etc., to ensure that customer expectations are met through the whole life cycle of the product. A successful application of these disciplines is most often based upon intelligent use of data, viz. data collection, interpretation and understanding, followed by some action to improve quality. The ultimate information about quality aspects of a product is provided by data from the use of the product, and therefore it is of interest to investigate eld performance for the product, e.g. in terms of repair data. For some products, repair is performed only by licensed repair facilities, and data on repair may be collected in data banks maintained by the manufacturing organisation. Properly utilized such data banks may provide valuable information on eld performance of a product. In the present paper we shall discuss the use of eld failure data in quality engineering. When such data are available, it is natural to measure quality in terms of the mean cumulative number of failures as a function of time. This function may be considered for the equipment as a whole, or for speci c component positions. The mean cumulative number of failures may be estimated either by a non-parametric estimate as an average over exposed equipments, or by a parametric estimate, if a model for the lifetimes of the components may be assumed. The non-parametric estimate is a useful graphical tool for exploratory analysis. In the paper we review the statistical properties of this estimate. In industrial practice, lack of control often manifest as a heterogeneity in the distribution of relevant quality parameters. In the paper we suggest a simple parametric model to describe heterogeneity in the distribution of the lifetime of the parts, and give a parametric expression for the resulting mean cumulative number of failures as a function of time under this model. The features of this model are
雷诺应力输运方程在圆柱坐标系下的数学方程推导形式研究
雷诺应力输运方程在圆柱坐标系下的数学方程推导形式研究李德波;徐齐胜;宋景慧;沈跃良;刘亚明;邓剑华【摘要】在圆孔射流直接数值模拟方法或大涡数值模拟方法研究中,由于圆孔射流对称性,大多采用圆柱坐标系。
在圆柱坐标系下,进行雷诺输运方程数学表达式的推导研究,给出三个雷诺正应力和一个切应力准确的输运方程数学推导方程。
该方程为研究圆孔射流湍流机理以及雷诺平均数值模拟方法模型改进提供了理论基础,具有一定的科学意义和工程应用价值。
%In research on circular hole jet flow direct numerical simulation method or large eddy numerical simulation meth-od,in view of symmetry of circular hole jet flow,it is usually using cylindrical-coordinate system.Under cylindrical-coordi-nate system,this paper introduces deduction research on mathematical expression of Reynolds transport equation and pro-vides three correct mathematical deduction equations of Reynolds positive stress transport equations and one correct mathe-matical deduction equation of shear stress transport equation.The proposed Reynolds transport equation provides theoretical basis for studying turbulence mechanism of circular hole jet flow and improving Reynolds average numerical simulation model which is of important scientific meanings and engineering application value.【期刊名称】《广东电力》【年(卷),期】2014(000)006【总页数】6页(P6-11)【关键词】雷诺应力输运方程;圆柱坐标;数学方程【作者】李德波;徐齐胜;宋景慧;沈跃良;刘亚明;邓剑华【作者单位】广东电网公司电力科学研究院,广东广州 510080;广东电网公司电力科学研究院,广东广州 510080;广东电网公司电力科学研究院,广东广州510080;广东电网公司电力科学研究院,广东广州 510080;广东电网公司电力科学研究院,广东广州 510080;广东电网公司电力科学研究院,广东广州 510080【正文语种】中文【中图分类】TM744气固两相流动在自然界是一种最广泛的流动形式,气固两相流动的理论研究也是一个热点课题。
时间依赖问题

Ωn (t) ,
(5)
Ω1 (t) =
0 ′ 2.) Ω2 = −1/2[Ω1, A] so that t t1
A(t1 )dt1 ,
(6)
Ω2 (t) = 1/2
0 0
[A(t1 ), A(t2 )]dt2 dt1 ,Leabharlann (7)and so on.
3
The procedure can be written as Magnus expansion generator: ′ Ω2 = −1/2[Ω1, A] so that
Multi-product expansion, Suzuki’s method and the Magnus integrator for solving time-dependent problems
J¨ urgen Geiser and Siu A. Chin
geiser@mathematik.hu-berlin.de
4
The fourth order method is given in [5], see also the coefficients in the appendix. The convergence results are given in [17]. In the next we present the algorithms for a Hamiltonian application. Application to a Hamiltonian The algorithm is given for a Hamiltonian as: H = T (p, t) + V (q, t) For example : H = p2 /2 + V (q, t), where T (p, t) = p2 /2 and
英文河流动力学水力学Lecture12- Non-Newtonian

CVG5162 – Advanced River HydraulicsLecture 12: Non-Newtonian Fluid Flows Viscosity Recall Dynamic (Absolute) Viscosity ( ) is a measure of the resistance of a fluid to shear stress. In liquids, the viscosity is due to cohesion between molecules. Less viscous fluids flow easier: ketchup is more viscous than water. Newton’s law of viscosity is: dy duµτ= i.e. dydu τµ=where is shear stress (N/m 2) and du/dy is the gradient of velocity in the vertical direction. In fluids, du/dy represents the strain in the fluid, thus this relation is analogous to Young’s modulus [εσE = ]. The classical experiment (performed by Newton) is to place two plates parallel to each other and separated by a distance Y with a fluid in the space between. A tangential force is applied to the top plate (from which is calculated, =F/A), which causes the upper plate to move with velocity U, which is recorded. Figure 1. Source: Daugherty et al.With the no-slip assumption, the fluid particles next to each plate will assume the velocity of the plate. For laminar steady flow, the velocity gradient in the fluid between the plates will be linear.(i.e. du/dy is constant).Fluids for which does not depend on du/dy are described as Newtonian. Most common fluids are Newtonian. However, particularly relevant for some geophysical flows, fluids with very high suspended sediment concentration can be non-Newtonian. If one assumes that a fluid has zero viscosity (and therefore zero friction), the fluid is termed an ideal fluid. Note that an ideal fluid will not undergo strain due to the applied stress, thus it would maintain zero velocity between the two plates.Figure 2. Source: Daugherty et al.Viscosity of a fluid decreases with temperature, because cohesion diminishes. The dynamic viscosity of water at 20ºC is 1.005E-3 N s/m 2. Kinematic Viscosity ( ) is the dynamic viscosity divided by density: ρµν=. The kinematic viscosity of water at 20ºC is 1.007E-6 m 2/s. Turbulent eddy viscosity We have also seen that turbulence adds an extra apparent (eddy) viscosity (νT ), which is due to the increased transfer of momentum between fluid layers as a result of the turbulent motion (i.e. the Reynolds stress): ()dy du uv dy du T νννρτ+=−= Non-Newtonian Fluid We can see from Figure 2 above, that a Non-Newtonian fluid does not have a linear relation between shear stress and strain. In other words, the viscosity coefficient µ is not a constant – it varies with the shear stress applied. Some non-Newtonian fluids are relatively straight-forward, in that the instantaneous shear depends only on du/dy (as in the figure above). These are described as ‘time independent’, ‘purely viscous’, ‘inelastic’, or ‘generalized Newtonian fluids’ (GNF) (Chabbra and Richardson 1999, p.5). In more complex time-dependent non-Newtonian fluids the instantaneous apparent viscosity also depends on the flow history and previous shear rate.An important distinction between types of time-independent non-Newtonian fluids is whether or not they display a yield strength (i.e. whether a threshold stress is required to initiate strain (deformation) of the fluid, i.e. the stress required to get the fluid moving). See Figure 3. Note that the field of rheology bridges non-Newtonian fluids, plastic solids, and soils. Typically, the viscosity of a time-independent non-Newtonian fluid is specified as a function that depends on du/dy. Secondly, a yield stress term may be included. A viscoplastic is a fluid that displays a yield stress. A Bingham-plastic is a viscoplastic with a linear relation between shear and strain once yield shear is obtained:+=dy du y ηττ where τy is the yield stress (the stress required to initiate strain), and η is the dynamic viscosity (the slope of the line after the yield stress). A shear-thinning or pseudo-plastic fluid has no yield stress, but a relatively high viscosity at low strain. A shear-thickening or dilatant fluid has no yield stress, but a relatively low viscosity at low strain (high viscosity at high strain).Figure 3. Source: Chhabra and Richardson 1999. Note that pseudo-plastic fluid and shear-thinning fluid are synonomous. Figure 1.5 applies to polymer solutions, but shows how apparent viscosity decreases with increasing strain rate for a pseuodplastic fluid.Water-Sediment Mixtures The behaviour of fluids with high suspended sediment volumetric concentration (C s ) encompasses the range from Newtonian, to pseudo-plastic, to Bingham plastic, to yield-pseudoplastic depending on sediment concentration. Furthermore, individual clays have different electrochemical properties, and therefore different rheology. The analysis of high C s flows is thus complex. Julien and Lan (1991) provided a succinct summary of research until that time. Bagnold (1954) initiated this research field, and proposed that at high C s , fluid shear would be dominated by interparticle friction and collisions. He found that under very high rates of shear (i.e. high du/dy) and high C s , the shear stress increases as a second power of du/dy. Thus, the fluid can be described as a yield-pseudo plastic with convexivity to the shear stress (see Figure 4). The increased particle interactions at higher du/dy results in increased apparent viscosity (i.e. shear thickening). An empirical power-law equation (Herschel and Bulkley 1926) can be used for the shear in high clay-water suspensions at high du/dy (Govier and Aziz 1987, cited in O’Brien and Julien 1988):n y dy du a +=ττNote that n=2 based on the Bagnold observations. Alternatively, O’Brien and Julien (1988) found that under lower du/dy, the shear stress varies linearly with du/dy, thus at low du/dy the fluid mixture can be described as a Bingham plastic. They also argued that these are more realistic shear rates (du/dy) for geophysical flows. Note that both the yield stress and the dynamic viscosity increase exponentially with sediment concentration – three orders or magnitude increase between C s = 0.1 and 0.4 (O’Brien and Julien 1988)Julien and Lan provide the following summary plots: Figure 4. Source: Julien and Lan (1991)Figure 5. Source: Julien and Lan (1991)O’Brien and Julien (1985), cited in Julien and Lan (1991), proposed the following:2 ++=dy du dy du y ζηττwhere the first term is for the yield stress, the second for viscous (dynamic) stress, and the third term for the ‘turbulent-dispersive’ stress, which accounts for both turbulence and particle-particle interactions, both of which are presumed to vary as a second power with du/dy.Note that 2212s s d a l λρρζ+=, where ρ and l are mixture density and mixing length, a 1 is Bagnold’s empirical constant, λ varies with sediment concentration, and ρs and d s are sediment density and grain size. Note that the first term works out to be the turbulent Reynolds stress, and the second term is Bagnold’s stress due to particle interactions.Julien and Lan (1991) non-dimensionalized their model (see paper) to collapse the various data sets:Figure 6. Source: Julien and Lan (1991)TemperatureCoussot and Piau (1994) found little change in mud suspension rheological behaviour for temperatures ranging from 0°C to 20°C.Thixotropic Non-Newtonian FluidChanson (2006) presented a model for 1D dam-break flow of a high C s thixotropic fluid. A thixotropic fluid is a solid gel-like substance when at rest, but liquefies when agitated. The precise definition of thixotropy is a fluid which undergoes a decreasing apparent viscosity (i.e. reduced shear stress) when exposed to a constant rate of shear (i.e. du/dy) (Chhabra and Richardson 1999). Thus, viscosity is time-dependent. Mud suspensions tend to display thixotropy (Figure 7).Figure 7. Source: Chhabra and Richardson (1999)Chanson utilized a model by Coussot et al. (2002) for the viscosity of a thixotropic fluid:()n o a λµµ+×= whereλαθλ×∂∂×−=∂∂yV t 1 and the four terms µo , n, θ, and α are constants for a given fluid. Note that the viscosity in this model is time dependent. In general , numerical modelling of non-Newtonian fluids involves defining a relation that describes the viscosity of the fluid as a function of the fluid properties and flow (particularly du/dy). This equation must then be included in the set of equations to be solved. References Chanson, H., Jarny, S., and Coussot, P. (2006). "Dam break wave of thixotropic fluid." J. Hydraulic Eng., 132(3), 280-293. Chhabra, R., and Richardson, J. (1999). Non-Newtonian Flow in the Process Industries: Fundamentals and Engineering Applications , Butterworth Heinemann, Oxford. Daugherty, R. L., Franzini, J. B., and Finnemore, E. J. (1985). Fluid Mechanics with Engineering Applications, Eighth Edition , McGraw-Hill Book Company, New York. Julien, P. Y., and Lan, Y. (1991). "Rheology of hyperconcentrations." J. Hydraulic Eng., 117(3), 346-353. O'Brien, J., and Julien, P. (1988). "Laboratory analysis of mudflow properties." J. Hydraulic Eng., 114(8), 877-887.。
超级计算机
¾ 超级计算机...............................................................................................................................1 超级计算环境 2007 年 3 季度运行情况简报 .........................................................................1
深腾6800
● 共197名用户,3季度增加用户6名。 ● 有134名用户利用LSF提交作业,共完成.51000多个作业,用户作业平均规模为5.9个CPU,累计 使用机时112万CPU小时(按Walltime计算)。 ● 2007年3季度,深腾6800的磁盘阵列系统与QsNet网络系统先后发生故障,导致深腾6800的平均 整体使用率有所下降,为83.5%(按Walltime计算),平均CPU利用率69.1%(按CPUtime计算)。CPUtim e与Walltime之比平均为82.7%。 ● 2007年3季度,作业平均等待时间为23.3小时。 ● 已完成作业按规模分布情况:串行作业数量占62.6%,4处理器节点内并行作业数量占21.1%。 而根据作业使用的CPU小时计算,占用机时最多的并行作业规模分别为16处理器、33-63处理器、32处理 器、64处理器,其比例分别为21.8%,18.1%,17.9%和12.4%,串行作业仅使用总机时的2.1%,表明深腾6 800的计算机时还是主要用于较大规模的并行作业计算。
1. Introduction ...................................................................................................................2
Dynamic response of a layered water-saturated half space to a moving load

Dynamic response of a layered water-saturated half spaceto a moving loadXu Bin a ,Lu Jian-Feib,*,Wang Jian-Huaaa Department of Civil Engineering,Shanghai JiaoTong University,Shanghai 200030,China bDepartment of Civil Engineering,Jiangsu University,Zhenjiang,Jiangsu 212013,ChinaReceived 24September 2006;received in revised form 12March 2007;accepted 13March 2007Available online 18May 2007AbstractThe transmission and reflection matrices (TRM)method for a layered poroelastic half space subjected to moving loads is developed in this study.Applying the triple Fourier transformation,the general solutions for the displacements,the stresses and the pore pressure are derived from the governing equations of Biot’s theory.Utilizing the continuity conditions between each layer and the boundary condi-tions at the half space surface,the transformed domain solutions for the displacements,the pore pressures and the stresses are established by the transmission and reflection matrices (TRM)method.Numerical results in the time–space domain are obtained by performing the inverse Fourier transform with respect to frequency and the horizontal wavenumbers.Moreover,some numerical examples and corre-sponding analysis are presented in the paper.Numerical results show that the occurrence of a softer middle layer in the layered half space will enhance the vertical displacement and the pore pressure of the layered half space.Besides,the presence of a softer middle layer tends to make the response of the layered half space exhibit more oscillatory nature.Ó2007Elsevier Ltd.All rights reserved.Keywords:Layered half space;The water-saturated medium;Moving loads;Transmission and reflection matrices (TRM)method;Biot’s theory;The Fourier transform1.IntroductionDynamic response of a half space soil subjected to mov-ing loads at the surface is of significant importance in var-ious areas such as civil engineering,earthquake engineering and transportation engineering.There have been numerous investigations concerning the dynamic response of a half space medium subjected to a moving load since the 1950s.For example,two-dimensional problem of a line load moving with a uniform subsonic velocity over the sur-face of a homogeneous elastic half space was first consid-ered by Sneddon [1].Cole and Huth [2]considered the same problem for a normal line load and obtained the solu-tions for the subsonic,transonic and supersonic case.The three-dimension problem of the steady-state motion of apoint load in an unbounded body was considered by Eason et al.[3].Hung and Yang [4]studied the elastic waves in viso-elastic half space generated by various vehicle loads.It should be mentioned that the half space in the above papers is treated as the elastic or visco-elastic soil medium.It is well know that water-saturated soils are a two-phase material consisting of the soil frame and the pore water.Consequently,for saturated soils,a water-saturated porous medium model is more appropriate than the linear elastic or visco-elastic one.It is worth noting in terms of Biot’s theory,to date,many researches concerning the dynamic problem of the saturated porous medium have been carried out.For example,based on Based on Biot’s theory,Val-liappan et al.[5]presented an analytical solution for two-dimensional wave propagation in a fluid-saturated half space subjected to a surface strip harmonic load.Displace-ments and stresses on the surface as well as in the interior of the domain were evaluated by the Fourier transform.Also,the influences of soil parameters such as compressibility,0266-352X/$-see front matter Ó2007Elsevier Ltd.All rights reserved.doi:10.1016/pgeo.2007.03.005*Corresponding author.E-mail addresses:xubin1@ (B.Xu),ljfdoctor@ (J.-F.Lu),wjh417@ (J.-H.Wang)./locate/compgeoAvailable online at Computers and Geotechnics 35(2008)1–10saturation and permeability were examined in the paper. Many other researches in this direction can be found,for example,in[6–9].However,to date,studies concerning the dynamic response of a water-saturated poroelastic medium to mov-ing loads are rather limited.To the best of the authors’knowledge,Siddharth et al.[10]studied the dynamic response of a poroelastic half space by solving Biot’s dynamic equations approximately.Jin et al.[11,12]investi-gated the stresses and the pore pressure in a poroelastic half space generated by a moving load with a high speed using a semi-analytical method.It has been found that most foundations consist of sev-eral layers.Thus,a layered half space is an appropriate approximation for inhomogeneous soils.Therefore,the dynamic response of the layered half space to the external loads has been studied for a very long time.Early in1950s, The propagator matrix method was developed in the papers of Harkrider[13]and Haskell[14].Moreover,based on thefinite element method,Tabatabaie et al.[15]develop an analytical and numerical solutions wave propagation in a water-saturated layered half space.Besides,the exact stiffness matrix method,which is based on integral trans-form method,was put forward by Senjuntichai and Rajap-akse[8].In addition,the transmission and reflection matrix (TRM)method established by Luco and Apsel[16,17]is a very important method for investigating the dynamic response of a layered half space.The advantage of the method is that the mismatched exponential terms are eliminated in all the terms of the TRM.As a result,the TRM method can be valid for the high frequency and large layer thickness cases,which are difficult to solve by the conventional propagator matrix method.Consequently, the TRM method has been used widely in solving layered structure problems[7,18–20].Recently,Lu and Hanyga [7]derived a fundamental solution for a layered porous half space subjected to a vertical point force or a pointfluid source by the TRM method.However,to date,the TRM method has not been developed for the multi-layered water-saturated half space subjected to a moving load.Using the TRM method,the dynamic response of a multi-layered water-saturated half space subjected to a moving load with an arbitrary constant velocity will be investigated in this study.When developing the TRM method for moving loads,Biot’s dynamic equations are solved by the Fourier transform method and the general solutions for the displacements,the stresses and the pore pressure are obtained.According to the general solutions, the continuity conditions at the layer interfaces and the boundary conditions,the frequency wavenumber domain solution for the layered water-saturated poroelastic half space subjected to a moving load is derived via the trans-mission and reflection matrices(TRM)method.By means of inverse Fourier transform,the time-domain solution of the half space is retrieved from the frequency–wavenumber solution.When reduced to some special cases,our solu-tions agree very well with some known results.In order to demonstrate our method,some time-domain examples and corresponding analysis are presented in the paper. 2.Biot’s poroelastic model and its general solutionserning equations of Biot’s theoryThe constitutive relations for the porous medium have the form[21–23]r ij¼kd ij hþ2le ijÀad ij pð1Þp¼Àa M hþMeð2Þe¼Àw i;i;h¼u i;ið3Þwhere u i and w i(i=1,2,3)are the displacement of solid skeleton and the infiltration displacement of the porefluid, respectively;r ij is the stress of the bulk material;p is the pore pressure;e ij and h are the strain tensor and the dilata-tion of the solid skeleton,respectively;e is the volume of fluid injection into a unit volume of the bulk material;d ij is the Kronecher delta;k and l are Lame constants;a and M are Biot’s parameters accounting for compressibil-ity of the porous medium.The equations of motion for a bulk porous medium and porefluid have the forml u i;jjþðkþa2MþlÞu j;jiÀa Mw j;ji¼q€u iþq f€w ið4aÞa Mu j;jiþMw j;ji¼q f€u iþm€w iþb p KðtÞÃ_w ið4bÞwhere q and q f are mass densities of the bulk material and the porefluid,q=(1Àf)q s+f q f.q s is the density of the solid skeleton and f is the porosity of the porous medium; m=a1q f/f and a1is tortuosity;b p accounts for the viscosity of the porefluid and the permeability of the porous medium, respectively and K(t)is a time-dependent viscosity correction factor which describes the transition behavior from viscosity dominatedflow in the low frequency range towards inertia dominatedflow at high-frequency range[23,24];the dot over a variable denotes the time derivative and the star(*)be-tween the two variables denotes the time convolution.In order to solve Biot’s governing equations,two kinds of Fourier transform are involved:the Fourier transform with respect to time and frequency and the Fourier trans-form with respect to horizontal coordinates and horizontal wavenumbers.In this paper,the Fourier transform for time and the two horizontal coordinates are defined as follows^fðxÞ¼Z1À1fðtÞeÀi x t d t;fðtÞ¼12pZ1À1^fðxÞe i x t d xfðnÞ¼Z1À1fðxÞeÀi n x d x;fðxÞ¼12pZ1À1fðnÞe i n x d n~fðgÞ¼Z1À1fðyÞeÀi g y d y;fðyÞ¼12pZ1À1~fðgÞe i g y d gð5Þwhere the superimposed symbol‘‘Ù’’‘‘–’’‘‘$’’above a var-iable denotes the Fourier transform with respect to time t, x and y coordinates,respectively.2 B.Xu et al./Computers and Geotechnics35(2008)1–102.2.General solution for Biot’s equationsPerforming the Fourier transform with respect to time t on Eqs.(2)and (4b),the infiltration displacement of the pore fluid has the form ^wj ¼^p ;jm x 2Ài b p b Kðx Þx À#^u j ðj ¼1;2;3Þð6Þwhere #¼q f x 2m x 2Ài b p b K ðx Þx.Substituting Eq.(6)into Eq.(4a)inthe frequency domain,one has the following equation:l ^u i ;jj þðk þl Þ^u j ;ji þx 2ðq Àq f #Þ^u i Àða À#Þ^p ;i ¼0ð7ÞApplying the divergence operator on Eq.(6)and substi-tuting the resulting divergence and Eq.(3)into Eq.(2),thefollowing equation is obtained r 2^p þq f x 2#M ^p þq f x 2ða À#Þ^h #¼0ð8ÞSimilarly,using the divergence operator on Eq.(4a),thefollowing equation is obtainedðk þa 2M þ2l Þr 2^h þx 2ðq Àq f #Þ^h Àða À#Þr 2^p ¼0ð9ÞFrom Eq.(8),one has the following equation:^h ¼À#r 2^p q f x 2ða À#ÞÀ^p ða À#ÞMð10ÞSubstitution of Eq.(10)into Eq.(9),the following equation is yieldedr 4^p þb 1r 2^p þb 2^p ¼0ð11Þwhere b 1¼½ðm x 2Ài b p b Kðx Þx Þðk þa 2M þ2l Þþqx 2M À2a M q f x 2 =½ðk þ2l ÞM ,b 2¼½ðm x 2Ài b p b Kðx Þx Þqx 2M Àq 2f x 4 =½ðk þ2l ÞM .Performing the double Fourier integral transform with respect to the two horizontal coordinates x ,y on Eq.(11)and solving the resulting ordinary differential equation lead to^~ p ¼A e c 1z þB e Àc 1z þC e c 2z þD e Àc 2z ð12Þwhere c j ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffin 2þg 2À‘2j q ,‘21¼12b 1Àffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib 21À4b 2q ,‘22¼12b 1þffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib 21À4b 2q,(j =1,2),‘1and ‘2are the com-plex wavenumbers for the first kind (fast wave)and the sec-ond kind (slow wave)dilatational wave,respectively.Notethat the radicals c i (i =1,2)are selected such that Re(c i )P 0.Performing double Fourier integral transform with respect to two horizontal coordinates x ,y on Eq.(10)and substituting Eq.(12)into the resulting equation yields ^~ h ¼v 1ðA e c 1z þB e Àc 1z Þþv 2ðC e c 2z þD e Àc 2z Þð13Þwhere v j ¼½#M ‘2j Àq f x 2 =½q f x 2ða À#ÞM ,(j =1,2).Substituting ^~ p ðn ;g ;z ;x Þ,^~h ðn ;g ;z ;x Þinto the trans-formed form of Eq.(4)yields^~ u z ¼Àc 1a 1ðA e c 1z ÀB e Àc 1z ÞÀc 2a 2ðC e c 2z ÀD e Àc 2z ÞþE e c 3z þF e Àc 3z^~ u y ¼Ài g ½a 1ðA e c 1z þB e Àc 1z Þþa 2ðC e c 2z þD e Àc 2z ÞþG e c 3z þH e Àc 3z^~ wz ¼c 1ða 1#þq f x 2=#ÞðA e c 1z ÀB e Àc 1z Þþc 2ða 2#þq f x 2=#ÞðC e c 2z ÀD e Àc 2z ÞÀ#ðE e c 3z þF e Àc 3z Þð14Þwherea j ¼½k ðv j þl ÞÀa þ# =½ðS 2À‘2jÞl ,(j =1,2),S 2=(q Àq f #)x 2/l ,c 3¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffin 2þg 2ÀS 2q ,S is the complex wave number for the shear wave of the porous medium,A ,B ,C ,...,H are arbitrary constants.Note that the radi-cal c 3is selected such that Re (c 3)P 0.Making use of the transformed form of the dilatation of the solid ^~ h ¼i n ^~ u x þi g ^~ u y þo ^~ u z =o z ð15Þ^~ u x is obtained as followsi n ^~ u x ¼v 1ðA e c 1z þB e Àc 1z Þþv 2ðC e c 2z þD e Àc 2z ÞÀc 3ðE e c 3z ÀF e Àc 3z ÞÀi g ðG e c 3z þH e Àc 3z Þð16ÞAccording to (1)and (2),the following stresses areobtained^~ rzz ¼s 1ðA e c 1z þB e Àc 1z Þþs 2ðC e c 2z þD e Àc 2z Þþ2lc 3ðE e c 3z ÀF e Àc 3z Þi n ^~ rxz ¼Àg 1ðA e c 1z ÀB e Àc 1z ÞÀg 2ðC e c 2z ÀD e Àc 2z ÞÀðn 2þc 23ÞðE ec 3zþF e Àc 3z ÞÀi c 3g ðG e c 3z ÀH e Àc 3z Þ^~ ryz ¼À2i gc 1a 1ðA e c 1z ÀB e Àc 1z ÞÀ2i gc 2a 2ðC e c 2z ÀD e Àc 2z Þþi g ðE e c 3z þF e Àc 3z Þþc 3ðG e c 3z ÀH e Àc 3z Þð17Þwhere g j ¼v j þa j ðc 2j Àg 2Þ,s i ¼k ðv j À2l a j c 2j Þ,v j ¼Àc j ½v j þa j ðc 2j þn 2Àg 2Þ ,(j =1,2).3.Formulation of the layered porous half spaceThe model for n horizontal water-saturated porous lay-ers overlying a porous half space is illustrated in Fig.1.The j th porous layer is denoted by the symbol L j and the bot-tom layer is denoted by the symbol L n +1.The thickness of the j th layer is h j =z j Àz j À1and z j À1,z j denote the depth of the upper and lower boundary of the j th layer.In order to develop the TRM method,for the j th porous layer L j ,extracting all the positive and negative exponential term e Æc i z ði ¼1;2;3Þfrom general solution for the displace-ments,the pore pressure and the stresses (Eqs.(12),(14),(16)and (17))and combining them with the arbitrary functions A (n ,g ,x )...H (n ,g ,x )which are replaced byB.Xu et al./Computers and Geotechnics 35(2008)1–103aðjÞðn;g;xÞeÀc1j z j,bðjÞðn;g;xÞe c1j z jÀ1,cðjÞðn;g;xÞeÀc2j z j,dðjÞðn;g;xÞe c2j z jÀ1,eðjÞðn;g;xÞeÀc3j z j,fðjÞðn;g;xÞe c3j z jÀ1,gðjÞðn;g;xÞeÀc3j z j,hðjÞðn;g;xÞe c3j z jÀ1,respectively,the expres-sions for the displacements,the stresses and the pore pres-sure of the j th porous layer in the transformed domain are recast as followsWðjÞðn;g;x;zÞ8Â1¼DðjÞdðn;g;xÞDðjÞuðn;g;xÞSðjÞdðn;g;xÞSðjÞuðn;g;xÞ"#ÂWðjÞdðn;g;x;zÞT WðjÞuðn;g;x;zÞTh i Tð18aÞWðjÞðn;g;x;zÞ8Â1¼i n^~ uðjÞx^~ uðjÞy^~ uðjÞz^~ wðjÞzi n^~ rðjÞxz^~ rðjÞyz^~ rðjÞzz^~ pðjÞh i Tð18bÞWðjÞd ðn;g;x;zÞ¼bðjÞeÀc1jðzÀz jÀ1ÞdðjÞeÀc2jðzÀz jÀ1ÞfðjÞÂÂeÀc3jðzÀz jÀ1ÞhðjÞeÀc3jðzÀz jÀ1ÞÃTð18cÞWðjÞu ðn;g;x;zÞ¼aðjÞeÀc1jðz jÀzÞcðjÞeÀc2jðz jÀzÞeðjÞÂÂeÀc3jðz jÀzÞgðjÞeÀc3jðz jÀzÞwhere the superscript j denotes the j th porous layer and W(j)(n,g,z,x)8·1is the displacements,stresses and pore pres-sure in the frequency–wavenumbers domain.The vectorsWðjÞd ðn;g;z;xÞ,WðjÞuðn;g;z;xÞare termed as down-goingand up-going wave vector.From Eqs.(18c)and(18d),one has the following equationsWðjÞdðn;g;z jÀ1;xÞ¼½bðjÞðn;g;xÞdðjÞðn;g;xÞfðjÞðn;g;xÞhðjÞðn;g;xÞ TWðjÞuðn;g;z j;xÞ¼½aðjÞðn;g;xÞcðjÞðn;g;xÞeðjÞðn;g;xÞgðjÞðn;g;xÞ Tð19ÞIn terms of Eqs.(18)and(19),the down-going and up-going wave vectors are recast in the following form:WðjÞdðn;g;z;xÞ¼EðjÞðzÀz jÀ1ÞWðjÞdðn;g;z jÀ1;xÞWðjÞuðn;g;z;xÞ¼EðjÞðz jÀzÞWðjÞuðn;g;z j;xÞð20Þwhere EðjÞð hÞ¼eÀc1j h0000eÀc2j h0000eÀc3j h0000eÀc3j h26643775.It follows from above analysis that for each porous layer there are eight arbitrary functions.As a result,there are8·(n+1)unknowns to be determined for the layered half space.According to Deresiewicz and Skalak[21],dis-placement u x,u y,u z,w z and the pore pressure p,stress r xz,r yz,r zz should be continuous at the interfaces.Thus, the following eight continuity conditions hold at each interface^~ uðjÞxðn;g;z j;xÞ¼^~ uðjþ1Þxðn;g;z j;xÞ;^~ uðjÞyðn;g;z j;xÞ¼^~ uðjþ1Þyðn;g;z j;xÞ^~ uðjÞzðn;g;z j;xÞ¼^~ uðjþ1Þzðn;g;z j;xÞ;^~ pðjÞðn;g;zj;xÞ¼^~ pðjþ1Þðn;g;z j;xÞ^~ rðjÞxzðn;g;z j;xÞ¼^~ rðjþ1Þxzðn;g;z j;xÞ;^~ rðjÞyzðn;g;z j;xÞ¼^~ rðjþ1Þyzðn;g;z j;xÞ^~ rðjÞzzðn;g;z j;xÞ¼^~ rðjþ1Þzzðn;g;z j;xÞ;^~ wðjÞzðn;g;z j;xÞ¼^~ wðjþ1Þzðn;g;z j;xÞðj¼1;2;...;nÞð21ÞSuppose now that the medium is set into motion by a concentrated load F moving with a constant velocity c along the positive x-axis,which has the following formFðx;y;tÞ¼F z dðxÀctÞdðyÞð22Þwhere d(ÁÁÁ)is the Dirac delta function,F z is the magnitude of the moving load.Then,the four surface boundary con-ditions for the half space with a permeable surface are ob-tained as follows^~ rð1Þxzðn;g;0;xÞ¼0;^~ rð1Þyzðn;g;0;xÞ¼0^~ rð1Þzzðn;g;0;xÞ¼À^~F;^~ pð1Þðn;g;0;xÞ¼0ð23ÞIf the vertical load F is distributed over a rectangle with size2a·2b and moves with a constant velocity c along the positive x-axis,then,the moving load can be represented as followsFðx;y;tÞ¼F z½HðxÀctþaÞÀHðxÀctÀaÞ ½HðyþbÞÀHðyÀbÞ ð24Þwhere H(ÁÁÁ)is the Heaviside step function.According to the shifting theorem of the Fourier trans-form,in the frequency–wavenumber domain,Eqs.(22), (24)assume the following form,respectively^~Fðn;g;xÞ¼2p F z dðxþn cÞ^~Fðn;g;xÞ¼8p F zsinðn aÞnsinðg bÞgdðxþn cÞð25Þ4 B.Xu et al./Computers and Geotechnics35(2008)1–10Besides,if the bottom layer(L n+1layer)is a half space, the up-going wave should vanish.Therefore,one has fol-lowing four radiation conditionsWðnþ1Þuðn;g;z;xÞ¼0;z2L nþ1ð26ÞIf the layered half space consists of n porous layers over-lying a rigid half space with a completely impermeable sur-face,then,the boundary condition for the n th layer at z=z n has the following form^~ uðnÞx ðn;g;z n;xÞ¼0;^~ uðnÞyðn;g;z n;xÞ¼0^~ uðnÞz ðn;g;z n;xÞ¼0;^~ wðnÞðn;g;z n;xÞ¼0ð27Þ4.Transmission and reflection matrix(TRM)method for a layered porous half spaceIn terms of Eq.(18),the continuity condition Eq.(21) for the j th interface is recast as followsÀDðjþ1Þd DðjÞuÀSðjþ1Þd SðjÞu"#Wðjþ1Þdðn;g;x;z jÞWðjÞu ðn;g;x;z jÞ"#¼ÀDðjÞdDðjþ1ÞuÀSðjÞdSðjþ1Þu"#WðjÞdðn;g;x;z jÞWðjþ1Þuðn;g;x;z jÞ"#ðj¼1;2;...;nÞð28ÞInversion of the matrix in the left-hand side of Eq.(28) givesWðjþ1Þdðn;g;x;z jÞWðjÞu ðn;g;x;z jÞ"#¼TðjÞdRðjÞuRðjÞdTðjÞu"#WðjÞdðn;g;x;z jÞWðjþ1Þuðn;g;x;z jÞ"#ð29ÞwhereTðjÞdRðjÞuRðjÞdTðjÞu"#¼ÀDðjþ1ÞdDðjÞuÀSðjþ1ÞdSðjÞu"#À1ÀDðjÞdDðjþ1ÞuÀSðjÞdSðjþ1Þu"#.The4·4matrix RðjÞu ðn;g;xÞand RðjÞdðn;g;xÞin Eq.(29)represent reflection matrices for up-going and down-going P1,P2,S waves incident on the j th interface,whileTðjÞu ðn;g;xÞ,TðjÞdðn;g;xÞdenote the transmission matricesfor the up-going and down-going P1,P2,S waves incident on the j th interface.For simplicity,the following matrix notations are introducedTðjÞde RðjÞueRðjÞde TðjÞue"#¼TðjÞdRðjÞuRðjÞdTðjÞu"#EðjÞðh jÞ00Eðjþ1Þðh jþ1Þ"#;T gðjÞde R gðjÞueR gðjÞde T gðjÞue"#¼T gðjÞdR gðjÞuR gðjÞdT gðjÞu"#EðjÞðh jÞ00Eðjþ1Þðh jþ1Þ"#ð30Þwhere T gðjÞde ðn;g;xÞ,R gðjÞdeðn;g;xÞ,T gðjÞueðn;g;xÞ,R gðjÞueðn;g;xÞare the generalized transmission and reflection matrices for the down-going and up-going wave incident on the j th interface and their expressions will be given below.According to[7],the following equations connecting the downward wave vector Wð1Þdðn;g;0;xÞin thefirst layer withthe up-going and down-going wave vectors WðjÞuðn;g;z j;xÞ,WðjÞdðn;g;z jÀ1;xÞin the L j(j=1,2,...,n)holdWðjÞdðn;g;z jÀ1;xÞ¼T gðjÀ1ÞdeT gðjÀ2Þde...T gð2ÞdeT gð1ÞdWð1Þdðn;g;z1;xÞð31aÞWðjÞuðn;g;z j;xÞ¼R gðjÞdWðjÞdðn;g;z j;xÞð31bÞR gðjÞd¼RðjÞdþTðjÞueRðjþ1ÞdeT gðjÞdð31cÞT gðjÞde¼ðIÀRðjÞueR gðjþ1ÞdeÞÀ1TðjÞdej¼1;2;...;nð31dÞIf the bottom layer has the radiation condition(26),the following relation is obtained from Eq.(29)R gðnþ1Þde¼0ð32ÞIf the bottom layer is a rigid half space,in terms of the Eq.(18),one has the following equation:DðnÞdWðnÞdðn;g;x;z nÞþDðnÞuWðnÞuðn;g;x;z nÞ¼0ð33ÞFrom Eq.(33),one has the following equation:WðnÞuðn;g;z n;xÞ¼R gðnÞdeWðnÞdðn;g;z nÀ1;xÞð34Þwhere R gðnÞde¼À½DðnÞuÀ1DðnÞdEðh nÞ.Note that in terms of the known R gðnþ1Þdeor R gðnÞde,T gðjÞd and R gðjÞdare available for each layer via Eq.(31).In terms of the surface boundary conditions(23),the following rela-tion is obtained from Eq.(18)Sð1ÞdWð1Þdðn;g;0;xÞþSð1ÞuWð1Þuðn;g;0;xÞ¼^~Qðn;g;xÞð35Þwhere^~Qðn;g;xÞ¼00À^~ Fðn;g;xÞ0h i T.According to Eq.(31b),the following equation is obtainedWð1Þuðn;g;z1;xÞ¼R gð1ÞdeWð1Þdðn;g;0;xÞð36ÞSubstitutions of Eq.(36)into Eq.(35),the down-going wave vector for thefirst layer is obtainedWð1Þdðn;g;0;xÞ¼½Sð1ÞdþSð1ÞuEð1Þðh1ÞR gð1ÞdeÀ1^~Qðn;g;xÞð37Þwhere R de g(1)can be obtained by Eq.(31).After the wave vectors in thefirst layer are determined, it is straightforward to obtain all the wave vectors in arbi-trary layer by using Eq.(31).As mentioned above,after determining the wave vectors of an arbitrary layer,the dis-placements,the stresses and the pore pressure can be deter-mined by Eq.(18).In view of Eq.(25),all the variables in the frequency–wavenumber domain can be expressed as follows^~Xðn;g;z;xÞ¼F z dðxþn cÞ^~XÃðn;g;z;xÞð38ÞIn order to obtain the time–space domain solution,the tri-ple inversion of the Fourier transform should be per-formed.Thus,the displacements,the stresses and the pore pressure have the following uniform expression in the time–space domainB.Xu et al./Computers and Geotechnics35(2008)1–105。
科技英语翻译课后题答案课后习题答案
The power plant is the heart of a ship. 动力装置是船舶的心脏。
The power unit for driving the machines is a 50-hp induction motor.驱动这些机器的动力装置是一台50马力的感应电动机。
Semiconductor devices, called transistors, are replacing tubes in many applications.半导体装置也称为晶体管,在许多场合替代电子管。
Cramped conditions means that passengers’legs cannot move around freely.空间狭窄,旅客的两腿就不能自由活动。
All bodies are known to possess weight and occupy space. 我们知道,所有的物体都有重量并占据空间。
The removal of minerals from water is called softening. 去除水中的矿物质叫做软化。
A typical foliage leaf of a plant belonging to the dicotyledons is composed of two principal parts: blade and petiole.Einstein’s relativity theory is the only one which can explain such phenomena.All four (outer planets) probably have cores of metals, silicates, and water.The designer must have access to stock lists of the materials he employs.设计师必须备有所使用材料的储备表。
数学英文论文

070451 Controlling chaos based on an adaptive nonlinear compensatingmechanism*Corresponding author,Xu Shu ,email:123456789@Abstract The control problems of chaotic systems are investigated in the presence of parametric u ncertainty and persistent external distu rbances based on nonlinear control theory. B y designing a nonlinear compensating mechanism, the system deterministic nonlinearity, parametric uncertainty and disturbance effect can be compensated effectively. The renowned chaotic Lorenz system subject to parametric variations and external disturbances is studied as an illustrative example. From Lyapu nov stability theory, sufficient conditions for the choice of control parameters are derived to guarantee chaos control. Several groups of experiments are carried out, including parameter change experiments, set-point change experiments and disturbance experiments. Simulation results indicate that the chaotic motion can be regulated not only to stead y states but also to any desired periodic orbits with great immunity to parametric variations and external distu rbances.Keywords: chaotic system, nonlinear compensating mechanism, Lorenz chaotic systemPACC: 05451. IntroductionChaotic motion, as the peculiar behavior in deterministic systems, may be undesirable in many cases, so suppressing such a phenomenon has been intensively studied in recent years. Generally speaking chaos suppression and chaos synchronization[1-4 ]are two active research fields in chaos control and are both crucial in application of chaos. In the following letters we only deal with the problem of chaos suppression and will not discuss the chaos synchronization problem.Since the early 1990s, the small time-dependent parameter perturbation was introduced by Ott,Grebogi, and Y orke to eliminate chaos,[5]many effective control methods have been reported in various scientific literatures.[1-4,6-36,38-44,46] There are two lines in these methods. One is to introduce parameter perturbations to an accessible system parameter, [5-6,8-13] the other is to introduce an additive external force to the original uncontrolled chaotic system. [14-37,39-43,47] Along the first line, when system parameters are not accessible or can not be changed easily, or the environment perturbations are not avoided, these methods fail. Recently, using additive external force to achieve chaos suppression purpose is in the ascendant. Referring to the second line of the approaches, various techniques and methods have been proposed to achieve chaos elimination, to mention only a few:(ⅰ) linear state feedback controlIn Ref.[14] a conventional feedback controller was designed to drive the chaotic Duffing equation to one of its inherent multiperiodic orbits.Recently a linear feedback control law based upon the Lyapunov–Krasovskii (LK) method was developed for the suppression of chaotic oscillations.[15]A linear state feedback controller was designed to solve the chaos control problem of a class of new chaotic system in Ref.[16].(ⅱ) structure variation control [12-16]Since Y u X proposed structure variation method for controlling chaos of Lorenz system,[17]some improved sliding-mode control strategies were*Project supported by the National Natural Science Foundation of C hina (Grant No 50376029). †Corresponding au thor. E-mail:zibotll@introduced in chaos control. In Ref.[18] the author used a newly developed sliding mode controller with a time-varying manifold dynamic to compensate the external excitation in chaotic systems. In Ref.[19] the design schemes of integration fuzzy sliding-mode control were addressed, in which the reaching law was proposed by a set of linguistic rules. A radial basis function sliding mode controller was introduced in Ref.[20] for chaos control.(ⅲ) nonlinear geometric controlNonlinear geometric control theory was introduced for chaos control in Ref.[22], in which a Lorenz system model slightly different from the original Lorenz system was studied considering only the Prandtl number variation and process noise. In Ref.[23] the state space exact linearization method was also used to stabilize the equilibrium of the Lorenz system with a controllable Rayleigh number. (ⅳ)intelligence control[24-27 ]An intelligent control method based on RBF neural network was proposed for chaos control in Ref.[24]. Liu H, Liu D and Ren H P suggested in Ref.[25] to use Least-Square Support V ector Machines to drive the chaotic system to desirable points. A switching static output-feedback fuzzy-model-based controller was studied in Ref.[27], which was capable of handling chaos.Other methods are also attentively studied such as entrainment and migration control, impulsive control method, optimal control method, stochastic control method, robust control method, adaptive control method, backstepping design method and so on. A detailed survey of recent publications on control of chaos can be referenced in Refs.[28-34] and the references therein.Among most of the existing control strategies, it is considered essentially to know the model parameters for the derivation of a controller and the control goal is often to stabilize the embedded unstable period orbits of chaotic systems or to control the system to its equilibrium points. In case of controlling the system to its equilibrium point, one general approach is to linearize the system in the given equilibrium point, then design a controller with local stability, which limits the use of the control scheme. Based on Machine Learning methods, such as neural network method[24]or support vector machine method,[25]the control performance often depends largely on the training samples, and sometimes better generalization capability can not be guaranteed.Chaos, as the special phenomenon of deterministic nonlinear system, nonlinearity is the essence. So if a nonlinear real-time compensator can eliminate the effect of the system nonlinearities, chaotic motion is expected to be suppressed. Consequently the chaotic system can be controlled to a desired state. Under the guidance of nonlinear control theory, the objective of this paper is to design a control system to drive the chaotic systems not only to steady states but also to periodic trajectories. In the next section the controller architecture is introduced. In section 3, a Lorenz system considering parametric uncertainties and external disturbances is studied as an illustrative example. Two control schemes are designed for the studied chaotic system. By constructing appropriate L yapunov functions, after rigorous analysis from L yapunov stability theory sufficient conditions for the choice of control parameters are deduced for each scheme. Then in section 4 we present the numerical simulation results to illustrate the effectiveness of the design techniques. Finally some conclusions are provided to close the text.2. Controller architectureSystem differential equation is only an approximate description of the actual plant due to various uncertainties and disturbances. Without loss of generality let us consider a nonlinear continuous dynamic system, which appears strange attractors under certain parameter conditions. With the relative degree r n(n is the dimension of the system), it can be directly described or transformed to the following normal form:121(,,)((,,)1)(,,,)(,,)r r r z z z z za z v wb z v u u d z v u u vc z v θθθθθθθθ-=⎧⎪⎪⎪=⎪=+∆+⎨⎪ ++∆-+⎪⎪ =+∆+⎪=+∆⎩ (1) 1y z =where θ is the parameter vector, θ∆ denotes parameter uncertainty, and w stands for the external disturbance, such that w M ≤with Mbeingpositive.In Eq.(1)1(,,)T r z z z = can be called external state variable vector,1(,,)T r n v v v += called internal state variable vector. As we can see from Eq.(1)(,,,,)(,,)((,,)1)d z v w u a z v w b z v uθθθθθθ+∆=+∆+ ++∆- (2)includes system nonlinearities, uncertainties, external disturbances and so on.According to the chaotic system (1), the following assumptions are introduced in order to establish the results concerned to the controller design (see more details in Ref.[38]).Assumption 1 The relative degree r of the chaotic system is finite and known.Assumption 2 The output variable y and its time derivatives i y up to order 1r -are measurable. Assumption 3 The zero dynamics of the systemis asymptotically stable, i.e.,(0,,)v c v θθ=+∆ is asymptotically stable.Assumption 4 The sign of function(,,)b z v θθ+∆is known such that it is always positive or negative.Since maybe not all the state vector is measurable, also (,,)a z v θθ+∆and (,,)b z v θθ+∆are not known, a controller with integral action is introduced to compensate theinfluenceof (,,,,)d z v w u θθ+∆. Namely,01121ˆr r u h z h z h z d------ (3) where110121112100ˆr i i i r r r r i i ii r i i d k z k k k z kz k uξξξ-+=----++-==⎧=+⎪⎪⎨⎪=----⎪⎩∑∑∑ (4)ˆdis the estimation to (,,,,)d z v w u θθ+∆. The controller parameters include ,0,,1i h i r =- and ,0,,1i k i r =- . Here011[,,,]Tr H h h h -= is Hurwitz vector, such that alleigenvalues of the polynomial121210()rr r P s s h sh s h s h --=+++++ (5)have negative real parts. The suitable positive constants ,0,,1i h i r =- can be chosen according to the expected dynamic characteristic. In most cases they are determined according to different designed requirements.Define 1((,,))r k sign b z v θμ-=, here μstands for a suitable positive constant, and the other parameters ,0,,2i k i r =- can be selected arbitrarily. After011[,,,]Tr H h h h -= is decided, we can tune ,0,,1i k i r =- toachievesatisfyingstaticperformances.Remark 1 In this section, we consider a n-dimensional nonlinear continuous dynamic system with strange attractors. By proper coordinate transformation, it can be represented to a normal form. Then a control system with a nonlinear compensator can be designed easily. In particular, the control parameters can be divided into two parts, which correspond to the dynamic characteristic and the static performance respectively (The theoretic analysis and more details about the controller can be referenced to Ref.[38]).3. Illustrative example-the Lorenz systemThe Lorenz system captures many of the features of chaotic dynamics, and many control methods have been tested on it.[17,20,22-23,27,30,32-35,42] However most of the existing methods is model-based and has not considered the influence ofpersistent external disturbances.The uncontrolled original Lorenz system can be described by112121132231233()()()()x P P x P P x w x R R x x x x w xx x b b x w =-+∆++∆+⎧⎪=+∆--+⎨⎪=-+∆+⎩ (6) where P and R are related to the Prendtl number and Rayleigh number respectively, and b is a geometric factor. P ∆, R ∆and b ∆denote the parametric variations respectively. The state variables, 1x ,2x and 3x represent measures of fluid velocity and the spatial temperature distribution in the fluid layer under gravity , and ,1,2,3i w i =represent external disturbance. In Lorenz system the desired response state variable is 1x . It is desired that 1x is regulated to 1r x , where 1r x is a given constant. In this section we consider two control schemes for system (6).3.1 Control schemes for Lorenz chaotic system3.1.1 Control scheme 1The control is acting at the right-side of the firstequation (1x), thus the controlled Lorenz system without disturbance can be depicted as1122113231231x Px Px u xRx x x x x x x bx y x =-++⎧⎪=--⎨⎪=-⎩= (7) By simple computation we know system (7) has relative degree 1 (i.e., the lowest ordertime-derivative of the output y which is directly related to the control u is 1), and can be rewritten as1122113231231z Pz Pv u vRz z v v v z v bv y z =-++⎧⎪=--⎨⎪=-⎩= (8) According to section 2, the following control strategy is introduced:01ˆu h z d=-- (9) 0120010ˆ-d k z k k z k uξξξ⎧=+⎪⎨=--⎪⎩ (10) Theorem 1 Under Assumptions 1 toAssumptions 4 there exists a constant value *0μ>, such that if *μμ>, then the closed-loop system (8), (9) and (10) is asymptotically stable.Proof Define 12d Pz Pv =-+, Eq.(8) can be easily rewritten as1211323123z d u v Rz z v v vz v bv =+⎧⎪=--⎨⎪=-⎩ (11) Substituting Eq.(9) into Eq.(11) yields101211323123ˆz h z d dv R z z v v v z v bv ⎧=-+-⎪=--⎨⎪=-⎩ (12) Computing the time derivative of d and ˆdand considering Eq.(12) yields12011132ˆ()()dPz Pv P h z d d P Rz z v v =-+ =--+- +-- (13) 0120010000100ˆ-()()ˆ=()d k z k k z k u k d u k d k z k d d k dξξξ=+ =--++ =-- - = (14)Defining ˆdd d =- , we have 011320ˆ()()dd d P h P R z P z v P v P k d=- =+- --+ (15) Then, we can obtain the following closed-loop system101211323123011320()()z h z dvRz z v v v z v bv d Ph PR z Pz v Pv P k d⎧=-+⎪=--⎪⎨=-⎪⎪=+---+⎩ (16) To stabilize the closed-loop system (16), a L yapunovfunction is defined by21()2V ςς=(17)where, ςdenotes state vector ()123,,,Tz v v d, isthe Euclidean norm. i.e.,22221231()()2V z v v dς=+++ (18) We define the following compact domain, which is constituted by all the points internal to the superball with radius .(){}2222123123,,,2U z v v d zv v dM +++≤(19)By taking the time derivative of ()V ςand replacing the system expressions, we have11223322*********01213()()(1)V z z v v v v dd h z v bv k P d R z v P R P h z d P v d P z v d ς=+++ =----++ +++-- (20) For any ()123,,,z v v d U ∈, we have: 222201230120123()()(1)V h z v b v k P dR z v PR Ph z d P v d d ς≤----+ ++++ ++ (21)Namely,12300()(1)22020V z v v dPR Ph R h R P ς⎡⎤≤- ⎣⎦++ - 0 - - 1 - 2⨯00123(1)()2Tb PR Ph P k P z v v d ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥0 ⎢⎥2⎢⎥++⎢⎥- - - +⎢⎥⎣22⎦⎡⎤⨯ ⎣⎦(22) So if the above symmetrical parameter matrix in Eq.(22) is positive definite, then V is negative and definite, which implies that system (16) is asymptotically stable based on L yapunov stability theory.By defining the principal minor determinants of symmetrical matrix in Eq.(22) as ,1,2,3,4i D i =, from the well-known Sylvester theorem it is straightforward to get the following inequations:100D h => (23)22004RD h =-> (24)23004R b D bh =-> (25)240302001()(1)(2)821[2(1)]08P M D k P D b PR Ph PR D Pb Ph R PR Ph =+-+++--+++>(26)After 0h is determined by solving Inequalities (23) to (25), undoubtedly, the Inequalities (26) can serve effectively as the constraints for the choice of 0k , i.e.20200031(1)(2)821[2(1)]8P M b PR Ph PR D Pb Ph R PR Ph k P D ++++ ++++>- (27)Here,20200*31(1)(2)821[2(1)]8P M b PR Ph PR D Pb Ph R PR Ph P D μ++++ ++++=-.Then the proof of the theorem 1 is completed. 3.1.2 Control scheme 2Adding the control signal on the secondequation (2x ), the system under control can be derived as112211323123x P x P x x R x x x x u xx x bx =-+⎧⎪=--+⎨⎪=-⎩ (28) From Eq.(28), for a target constant 11()r x t x =,then 1()0xt = , by solving the above differential equation, we get 21r r x x =. Moreover whent →∞,3r x converges to 12r x b . Since 1x and 2x havethe same equilibrium, then the measured state can also be chosen as 2x .To determine u , consider the coordinate transform:122133z x v x v x=⎧⎪=⎨⎪=⎩ and reformulate Eq.(28) into the following normal form:1223121231231zRv v v z u vPz Pv v z v bv y z =--+⎧⎪=-⎨⎪=-⎩= (29) thus the controller can be derived, which has the same expression as scheme 1.Theorem 2 Under Assumptions 1, 2, 3 and 4, there exists a constant value *0μ>, such that if *μμ>, then the closed-loop system (9), (10) and (29) is asymptotically stable.Proof In order to get compact analysis, Eq.(29) can be rewritten as12123123z d u v P z P v vz v bv =+⎧⎪=-⎨⎪=-⎩ (30) where 2231d Rv v v z =--Substituting Eq.(9) into Eq.(30),we obtain:1012123123ˆz h z d dv P z P v v z v bv ⎧=-+-⎪=-⎨⎪=-⎩ (31) Giving the following definition:ˆdd d =- (32) then we can get22323112123212301()()()()dRv v v v v z R Pz Pv Pz Pv v v z v bv h z d =--- =--- ----+ (33) 012001000ˆ-()d k z k k z k u k d u k dξξ=+ =--++ = (34) 121232123010ˆ()()()(1)dd d R Pz Pv Pz Pv v v z v bv h z k d=- =--- --+-+ (35)Thus the closed-loop system can be represented as the following compact form:1012123123121232123010()()()(1)zh z d v Pz Pv v z v bv d R Pz Pv Pz Pv v v z v bv h z k d⎧=-+⎪⎪=-⎪=-⎨⎪=---⎪⎪ --+-+⎩(36) The following quadratic L yapunov function is chosen:21()2V ςς=(37)where, ςdenotes state vector ()123,,,Tz v v d , is the Euclidean norm. i.e.,22221231()()2V z v v dς=+++ (38) We can also define the following compact domain, which is constituted by all the points internalto the super ball with radius .(){}2222123123,,,2U z v v d zv v dM =+++≤ (39)Differentiating V with respect to t and using Eq.(36) yields112233222201230011212322321312()(1)(1)()V z z v v v v dd h z P v bv k dP R h z d P z v z v v P b v v d P v d P z v d z v d ς=+++ =----+ +++++ ++--- (40)Similarly, for any ()123,,,z v v d U ∈, we have: 2222012300112133231()(1)(1)(2V h z P v b v k dPR h z d P z v v P b d P v d d M z dς≤----+ +++++ ++++ + (41)i.e.,12300()(12)22V z v v dPR M h P h P Pς⎡⎤≤- ⎣⎦+++ - -2 - 0 ⨯ 001230(12)(1)2TP b PR M h P k z v v d ⎡⎤⎢⎥⎢⎥⎢⎥ - ⎢⎥⎢⎥⎢⎥ ⎢⎥22⎢⎥⎢⎥ +++ - - -+⎢⎥⎣22⎦⎡⎤⨯ ⎣⎦(42) For brevity, Let1001(12)[(222)82(23)]P PR M h b PR P h M P b α=++++++ ++(43) 2201[(231)(13)]8P M P b b PR h α=+-+++ (44)230201(2)[2(12)8(2)(4)]PM P b P P PR M h P b Ph P α=++ +++ ++- (45)Based on Sylvester theorem the following inequations are obtained:100D h => (46)22004PD h P =-> (47)3202PMD bD =-> (48)403123(1)0D k D ααα=+---> (49)where,1,2,3,4i D i =are the principal minordeterminants of the symmetrical matrix in Eq.(42).*0k μ>*12331D αααμ++=- (50)The theorem 2 is then proved.Remark 2 In this section we give two control schemes for controlling chaos in Lorenz system. For each scheme the control depends on the observed variable only, and two control parameters are neededto be tuned, viz. 0h and 0k . According to L yapunov stability theory, after 0h is fixed, the sufficient condition for the choice of parameter 0k is also obtained.4. Simulation resultsChoosing 10P =,28R =, and 8/3b =, the uncontrolled Lorenz system exhibits chaotic behavior, as plotted in Fig.1. In simulation let the initial values of the state of thesystembe 123(0)10,(0)10,(0)10x x x ===.x1x 2x1x 3Fig.1. C haotic trajectories of Lorenz system (a) projected on12x x -plane, (b) projected on 13x x -plane4.1 Simulation results of control the trajectory to steady stateIn this section only the simulation results of control scheme 2 are depicted. The simulation results of control scheme 1 will be given in Appendix. For the first five seconds the control input is not active, at5t s =, control signal is input and the systemtrajectory is steered to set point2121(,,)(8.5,8.5,27.1)T Tr r r x x x b =, as can be seen inFig.2(a). The time history of the L yapunov function is illustrated in Fig.2(b).t/sx 1,x 2,x 3t/sL y a p u n o v f u n c t i o n VFig.2. (a) State responses under control, (b) Time history of the Lyapunov functionA. Simulation results in the presence ofparameters ’ changeAt 9t s =, system parameters are abruptly changed to 15P =,35R =, and 12/3b =. Accordingly the new equilibrium is changedto 2121(,,)(8.5,8.5,18.1)T Tr r r x x x b =. Obviously, aftervery short transient duration, system state converges to the new point, as shown in Fig.3(a). Fig.4(a) represents the evolution in time of the L yapunov function.B. Simulation results in the presence of set pointchangeAt 9t s =, the target is abruptly changedto 2121(,,)(12,12,54)T Tr r r x x x b =, then the responsesof the system state are shown in Fig.3(b). In Fig.4(b) the time history of the L yapunov function is expressed.t/sx 1,x 2,x 3t/sx 1,x 2,x 3Fig.3. State responses (a) in the presence of parameter variations, (b) in the presence of set point changet/sL y a p u n o v f u n c t i o n Vt/sL y a p u n o v f u n c t i o n VFig.4. Time history of the Lyapunov fu nction (a) in the presence of parameter variations, (b) in the presence of set point changeC. Simulation results in the presence ofdisturbanceIn Eq.(5)external periodic disturbance3cos(5),1,2,3i w t i π==is considered. The time responses of the system states are given in Fig.5. After control the steady-state phase plane trajectory describes a limit cycle, as shown in Fig.6.t/sx 1,x 2,x 3Fig.5. State responses in the presence of periodic disturbancex1x 3Fig.6. The state space trajectory at [10,12]t ∈in the presence ofperiodic disturbanceD. Simulation results in the presence of randomnoiseUnder the influence of random noise,112121132231233xPx Px x Rx x x x u xx x bx εδεδεδ=-++⎧⎪=--++⎨⎪=-+⎩ (51) where ,1,2,3i i δ= are normally distributed withmean value 0 and variance 0.5, and 5ε=. The results of the numerical simulation are depicted in Fig.7,which show that the steady responses are hardly affected by the perturbations.t/sx 1,x 2,x 3t/se 1,e 2,e 3Fig.7. Time responses in the presence of random noise (a) state responses, (b) state tracking error responses4.2 Simulation results of control the trajectory to periodic orbitIf the reference signal is periodic, then the system output will also track this signal. Figs.8(a) to (d) show time responses of 1()x t and the tracking trajectories for 3-Period and 4-period respectively.t/sx 1x1x 2t/sx 1x1x 2Fig.8. State responses and the tracking periodic orbits (a)&( b)3-period, (c)&(d) 4-periodRemark 3 The two controllers designed above solved the chaos control problems of Lorenz chaoticsystem, and the controller design method can also beextended to solve the chaos suppression problems of the whole Lorenz system family, namely the unified chaotic system.[44-46] The detail design process and close-loop system analysis can reference to the author ’s another paper.[47] In Ref.[47] according to different positions the scalar control input added,three controllers are designed to reject the chaotic behaviors of the unified chaotic system. Taking the first state 1x as the system output, by transforming system equation into the normal form firstly, the relative degree r (3r ≤) of the controlled systems i s known. Then we can design the controller with the expression as Eq.(3) and Eq.(4). Three effective adaptive nonlinear compensating mechanisms are derived to compensate the chaotic system nonlinearities and external disturbances. According toL yapunov stability theory sufficient conditions for the choice of control parameters are deduced so that designers can tune the design parameters in an explicit way to obtain the required closed loop behavior. By numeric simulation, it has been shown that the designed three controllers can successfully regulate the chaotic motion of the whole family of the system to a given point or make the output state to track a given bounded signal with great robustness.5. ConclusionsIn this letter we introduce a promising tool to design control system for chaotic system subject to persistent disturbances, whose entire dynamics is assumed unknown and the state variables are not completely measurable. By integral action the nonlinearities, including system structure nonlinearity, various disturbances, are compensated successfully. It can handle, therefore, a large class of chaotic systems, which satisfy four assumptions. Taking chaotic Lorenz system as an example, it has been shown that the designed control scheme is robust in the sense that the unmeasured states, parameter uncertainties and external disturbance effects are all compensated and chaos suppression is achieved. Some advantages of this control strategy can be summarized as follows: (1) It is not limited to stabilizing the embeddedperiodic orbits and can be any desired set points and multiperiodic orbits even when the desired trajectories are not located on the embedded orbits of the chaotic system.(2) The existence of parameter uncertainty andexternal disturbance are allowed. The controller can be designed according to the nominal system.(3) The dynamic characteristics of the controlledsystems are approximately linear and the transient responses can be regulated by the designer through controllerparameters ,0,,1i h i r =- .(4) From L yapunov stability theory sufficientconditions for the choice of control parameters can be derived easily.(5) The error converging speed is very fast evenwhen the initial state is far from the target one without waiting for the actual state to reach the neighborhood of the target state.AppendixSimulation results of control scheme 1.t/sx 1,x 2,x 3t/sL y a p u n o v f u n c t i o n VFig.A1. (a) State responses u nder control, (b) Time history of the Lyapunov functiont/sx 1,x 2,x 3t/sx 1,x 2,x 3Fig.A2. State responses (a) in the presence of parameter variations, (b) in the presence of set point changet/sL y a p u n o v f u n c t i o n Vt/sL y a p u n o v f u n c t i o n VFig.A3. Time history of the L yapu nov fu nction (a) in the presence of parameter variations, (b) in the presence of set point changet/sx 1,x 2,x 3Fig.A4. State responses in the presence of periodic disturbanceresponsest/sx 1,x 2,x 3Fig.A5. State responses in the presence of rand om noiset/sx 1x1x 2Fig.A6. State response and the tracking periodic orbits (4-period)References[1] Lü J H, Zhou T S, Zhang S C 2002 C haos Solitons Fractals 14 529[2] Yoshihiko Nagai, Hua X D, Lai Y C 2002 C haos Solitons Fractals 14 643[3] Li R H, Xu W , Li S 2007 C hin.phys.16 1591 [4]Xiao Y Z, Xu W 2007 C hin.phys.16 1597[5] Ott E ,Greb ogi C and Yorke J A 1990 Phys.Rev .Lett. 64 1196 [6]Yoshihiko Nagai, Hua X D, Lai Y C 1996 Phys.Rev.E 54 1190 [7] K.Pyragas, 1992 Phys. Lett. A 170 421 [8] Lima,R and Pettini,M 1990 Phys.Rev.A 41 726[9] Zhou Y F, Tse C K, Qiu S S and Chen J N 2005 C hin.phys. 14 0061[10] G .Cicog na, L.Fronzoni 1993 Phys.Rew .E 30 709 [11] Rakasekar,S. 1993 Pramana-J.Phys.41 295 [12] Gong L H 2005 Acta Phys.Sin.54 3502 (in C hinese) [13] Chen L,Wang D S 2007 Acta Phys.Sin.56 0091 (in C hinese) [14] C hen G R and Dong X N 1993 IEEE Trans.on Circuits andSystem-Ⅰ:Fundamental Theory and Applications 40 9 [15] J.L. Kuang, P.A. Meehan, A.Y.T. Leung 2006 C haos SolitonsFractals 27 1408[16] Li R H, Xu W, Li S 2006 Acta Phys.Sin.55 0598 (in C hinese) [17] Yu X 1996 Int.J.of Systems Science 27 355[18] Hsun-Heng Tsai, C hyu n-C hau Fuh and Chiang-Nan Chang2002 C haos,Solitons Fractals 14 627[19] Her-Terng Yau and C hieh-Li C hen 2006 C hao ,SolitonsFractal 30 709[20] Guo H J, Liu J H, 2004 Acta Phys.Sin.53 4080 (in C hinese) [21] Yu D C, Wu A G , Yang C P 2005 Chin.phys.14 0914 [22] C hyu n-C hau Fuh and Pi-Cheng Tu ng 1995 Phys.Rev .Lett.752952[23] Chen L Q, Liu Y Z 1998 Applied Math.Mech. 19 63[24] Liu D, R en H P, Kong Z Q 2003 Acta Phys.Sin.52 0531 (inChinese)[25] Liu H, Liu D and Ren H P 2005 Acta Phys.Sin.54 4019 (inChinese)[26] C hang W , Park JB, Joo YH, C hen GR 2002 Inform Sci 151227[27] Gao X, Liu X W 2007 Acta Phys.Sin. 56 0084 (in C hinese) [28] Chen S H, Liu J, Lu J 2002 C hin.phys.10 233 [29] Lu J H, Zhang S. 2001 Phys. Lett. A 286 145[30] Liu J, Chen S H, Xie J. 2003 C haos Solitons Fractals 15 643 [31] Wang J, Wang J, Li H Y 2005 C haos Solitons Fractals 251057[32] Wu X Q, Lu JA, C hi K. Tse, Wang J J, Liu J 2007 ChaoSolitons Fractals 31 631[33] A.L.Fradkov , R .J.Evans, 2002 Preprints of 15th IF AC W orldCongress on Automatic Control 143[34] Zhang H G 2003 C ontrol theory of chaotic systems (Shenyang:Northeastern University) P38 (in C hinese)[35] Yu-Chu Tian, Moses O.Tadé, David Levy 2002Phys.Lett.A.296 87[36] Jose A R , Gilberto E P, Hector P, 2003 Phys. Lett. A 316 196 [37] Liao X X, Yu P 2006 Chaos Solitons Fractals 29 91[38] Tornambe A, V aligi P.A 1994 Measurement, and C ontrol 116293[39] Andrew Y.T.Leung, Liu Z R 2004 Int.J.Bifurc.C haos 14 2955 [40] Qu Z L, Hu,G .,Yang,G J, Qin,G R 1995 Phys.Rev .Lett.74 1736 [41] Y ang J Z, Qu Z L, Hu G 1996 Phys.Rev.E.53 4402[42] Shyi-Kae Yang, C hieh-Li Chen, Her-Terng Yau 2002 C haosSolitons Fractals 13 767。
PhysRevLett.96.210403

Tuning the Mott Transition in a Bose-Einstein Condensate by Multiple Photon AbsorptionC.E.Creffield and T.S.MonteiroDepartment of Physics and Astronomy,University College London,Gower Street,London WC1E6BT,United Kingdom(Received4April2006;published1June2006)We study the time-dependent dynamics of a Bose-Einstein condensate trapped in an optical lattice.Modeling the system as a Bose-Hubbard model,we show how applying a periodic drivingfield can inducecoherent destruction of tunneling.In the low-frequency regime,we obtain the novel result that thedestruction of tunneling displays extremely sharp peaks when the driving frequency is resonant with thedepth of the trapping potential(‘‘multi-photon resonances’’),which allows the quantum phase transitionbetween the Mott insulator and the superfluid state to be controlled with high precision.We further showhow the waveform of thefield can be chosen to maximize this effect.DOI:10.1103/PhysRevLett.96.210403PACS numbers:05.30.Jp,03.65.Xp,03.75.Lm,73.43.NqRecent spectacular progress in trapping cold atomicgases[1]has provided a new arena for studying quantummany-body physics.In particular,ultracold bosons held inoptical potentials provide an almost ideal realization of theBose-Hubbard(BH)model[2],in which the model pa-rameters can be controlled to high precision.As well astheir purely theoretical interest,these systems attract at-tention because of their possible application to quantuminformation processing[3].The BH model is described by the HamiltonianH BH ÿJXh i;j i a yia j H:c:U2Xin i n iÿ1 ;(1)where a i(a y i)are the standard annihilation(creation) operators for a boson on site i,n i a y i a i is the number operator,J is the tunneling amplitude between neighboring sites,and U is the repulsion between a pair of bosons occupying the same site.Its physics is governed by the competition between the kinetic energy and the Hubbard interaction,and thus by the ratio U=J.When U=J 1the tunneling dominates,and the ground state of the system is a superfluid.As U=J is increased the system passes through a quantum phase transition,and evolves into a Mott-insulator(MI)state in which the bosons localize on the lattice sites.This phase transition was observed experimentally in Ref.[4]by varying the depth of the optical potential.In this Letter we propose an alternative method:applying an addi-tional oscillatory potential induces coherent destruction of tunneling(CDT),and thus suppresses the effect of J.CDT is a quantum interference effect,discovered in the pioneer-ing work of Ref.[5],in which the period for tunneling between states diverges as their associated quasienergies [6]approach degeneracy.Here we show how CDT can be used to control the dynamics of a boson condensate,by means of a novel resonance effect between U and the frequency of the drivingfield.We consider a one-dimensional BH model, driven by a time-periodic potential which varies linearly with site number.The Hamiltonian is given byH t H BH Kf tX Njjn j;(2)where K is the amplitude of the drivingfield,and f t is a T-periodic function of unit amplitude that describes its waveform.Such time-periodic linear potentials—gener-ated by an accelerated lattice for example—have already been used in cold-atom experiments[7].A similar form of driving potential was also recently investigated theoreti-cally[8]in the high-frequency regime(!>U),and was found to suppress the transition to the superfluid regime. Here,for thefirst time,the multiphoton(low-frequency) regime is investigated.An unexpected newfinding is that CDT is now modulated by a set of extremely sharp‘‘reso-nances’’[the contrast between the high-frequency behavior and the multiphoton regime investigated here is illustrated in Fig.1(a)].This means that the Mott transition can be induced by minute changes in experimental parameters. Henceforth we put@ 1and measure all energies in units of J,and set the number of bosons equal to the number of lattice sites N.Although the dimension of the Hilbert space increases exponentially with N,in a Fock basis H is extremely sparse,with at most 2Nÿ1)nonzero entries per row.Thus despite the rapid increase in the dimension of the Hilbert space,this sparsity allows us to treat relatively large systems of up to11sites,and so assess if the effects we observe survive in the thermodynamic limit.Our numerical investigation consists of initializing the system in the‘‘ideal’’MI state,j MI iQ a yjj0i,and evolving the many-particle Schro¨dinger equation over time(typically ten periods of the drivingfield)using a Runge-Kutta method.To study the system’s time-evolution quantitatively,we measure the overlap of the wave func-tion with the initial state P t jh MI j t ij2.For conve-nience we term the minimum value of P t attained during the time evolution to be the localization.When CDT occurs,the system will remain frozen in the MI state,and consequently the localization will be close to 1.Conversely,if the bosons are able to tunnel freely from site to site,the value of the localization will be reduced.We begin by considering the case of sinusoidal driving,f t sin !t .The MI transition is quite soft in 1D,starting at U ’4and developing fully for U >20.Throughout this work we use an intermediate value of U 8.Figure 1(a)shows how the localization in a 7-site system varies as the amplitude of the driving field is increased,while its fre-quency is held constant at ! 20.For K 0the local-ization has a value of 0:3,demonstrating that in the absence of a driving field this value of U is indeed insuffi-cient to maintain the MI state.Applying the driving field causes the localization to steadily rise from this value as K is increased from zero,indicating that the effective tunnel-ing between lattice sites is increasingly suppressed,until it peaks at a value close to 1at K=! 2:4.As K is increased further,the localization goes through a shallow local mini-mum,before again peaking at K=! 5:5.It was observed [8]that these values of K=!are close to the first two zeros of J 0,the zeroth Bessel function.Reducing the driving frequency to a lower value,! 8,produces a radically different behavior—the value of the localization rapidly drops as K=!is increased from zero,indicating that the field destroys the MI state.As K=!is increased further the value of the localization remains extremely low except at a series of very sharp peaks.Figure 1(b)emphasizes the narrowness of these peaks by showing the time evolution of the system for two values ofK .For the first,K 3:5!,P t rapidly falls from its initial value,reaching a level near zero within five driving peri-ods.There is a small dependence on the system size,with the decay occurring more quickly as N is increased.At the localization peak,K 3:8!,P t decays far more slowly with time,so that after 20periods of driving it only falls to a value of 0:9,and only minor dependence on N is evident.Thus for this value of !,altering the amplitude of the field by just 10%produces enormous differences in the localization.Although the Hamiltonian (2)is explicitly time depen-dent,the fact that it is periodic allows us to use the Floquettheorem to write solutions of the Schro¨dinger equation as t exp ÿi j t j t ,where j is the quasienergy,and j t is a T -periodic function called the Floquet state [6].As the quasienergies are only defined up to an arbitrary multiple of !,the quasienergy spectrum possesses a Brillouin zone structure,in precise analogy to the quasi-momentum in spatially periodic crystals.For the Floquet analysis,we work in an extended Hilbert space of T -periodic functions [9].In this approach,the Floquet states and quasienergies satisfyH t j j t i j j j t i ;(3)where H t H t ÿi @@=@t .Working in this extended Hilbert space thus reduces the task of calculating the time-dependent,driven dynamics of the system to a time-inde-pendent eigenvalue problem.To study the behavior of the quasienergies,we make use of a perturbative scheme developed in Ref.[10]to treat noninteracting systems,and later generalized in Ref.[11]to include interactions.Our procedure is to first find the eigensystem of the operator H 0 t H 0 t ÿi @@=@t ,where H 0contains terms diagonal in a Fock basis (i.e.,the driving term and the Hubbard interaction).We are thenable to use standard Rayleigh-Schro¨dinger perturbation theory to evaluate the corrections to this result,using the remaining terms of H BH as the perturbation.For the two-site system,a natural basis is given by the Fock states fj 1;1i ;j 2;0i ;j 0;2ig ,where j n;m i denotes the state with n bosons on the first site and m on the second.Finding the eigensystem of H 0then amounts to solving three first-order differential equations,yielding the resultj t i0;exp ÿi U ÿ t i K!cos !t ;0j 0 t i0;0;exp ÿi U ÿ 0 t ÿi K!cos !tj ÿ t i exp i ÿt ;0;0 :(4)Imposing the T -periodic boundary condition on these states requires setting ÿ 0and U ÿ =0 m!,where m is an integer.Thus in general it is not possible to include the full Hubbard-interaction term within H 0,depending on its commensurability with !.To deal with this it is necessary to decompose U into a form which0246800.51L o c a l i z a t i o n Time / TP (t )ω=20ω=8(a)FIG.1(color online).(a)The minimum overlap with the MI state,or localization ,reached in a 7-site system with U 8,during 10periods of driving.For ! 20(dashed line)the localization peaks at K=! 2:4;5:5—the zeros of J 0 K=! .When !is reduced to ! 8(the first photon resonance,solid line),the peaks become extremely narrow and are centered on the zeros of J 1 K=! .The diamonds mark the points K=! 3:5and 3.8(see below).(b)Time evolution of the ! 8case for three system sizes,7,9,and 11sites.For K=! 3:5,away from the resonance,the overlap with the initial state,P t ,rapidly drops to zero.For K=! 3:8,at the peak of the resonance,the decay is much slower,indicating that the driving field preserves the MI state.duplicates the Brillouin zone structure of the quasienergiesU n! u;n 0;1;2...(5)where u is the ‘‘reduced interaction,’’j u j !=2.This decomposition reveals that only the reduced interaction needs to be included in the perturbation,while the remain-der of U (an integer multiple of !)can be retained in H 0.To first order it is easily shown that the three quasiener-gies are given by0 u and u u 2 16J 2eff q =2;(6)where the intersite tunneling has been reduced to an effec-tive value J eff J J n K=! ,and n and u are defined in Eq.(5).Thus in the high-frequency limit (! U ),when n 0and u U ,it is clear that the quasienergies 0and are degenerate when J 0 K=! 0.In Fig.2(a)we show the excellent agreement between the perturbative result and the exact quasienergies for a driving field of frequency ! 20.In Fig.2(b)we plot the corresponding value of the localization,and it can be clearly seen that the peaks in this quantity are indeed centered on the points of closest approach of the quasienergies.It may be seen from Eq.(6)that for large values of u ,the quasienergy separa-tion ÿ 0 ’4J 2eff =u .The effect of u is thus to reduce the amplitude of oscillations in this quantity,and so to smear out the avoided crossings of the quasienergies.As a result,the peaks in the localization are rather broad andoverlap each other,and thus the localization cannot reach particularly low values.Equation (5)reveals the particular importance of photon resonances ,when U is an integer multiple of the frequency of the driving field,U n!.When this condition is sat-isfied the reduced interaction is zero,and the crossings between the quasienergies are well-defined.This is the origin of the extremely sharp peaks in localization seen in Fig.1(a)for ! U 8.Away from these peaks,the photon absorption compensates for the energy cost of doubly occupying a lattice site,in analogy to the photon-assisted tunneling studied in Ref.[12],thereby producing low values of localization.In Fig.2(c)we plot the quasie-nergies for the first photon resonance (n 1)for the two-site system.For weak fields (K=!<2)small deviations of the exact quasienergies from the perturbative result are visible,but for higher field strengths the agreement is again excellent.In Fig.2(d)we plot the localization produced in this system,and we can note that,as seen previously in the 7-site system,the localization takes extremely low values except at a set of very narrow peaks.These peaks are precisely aligned with the quasienergy crossings at the zeros of J 1 K=! .As we reduce !still further,we can expect to encounter a sequence of higher resonances with similar behavior.In Fig.3(a)we compare the values of localization produced in a 7-site system for the n 1and n 2resonances.The second photon resonance,however,produces a worse re-sult than for n 1.Although sharp peaks are still present in the localization,and in agreement with the perturbation theory they are indeed centered on the zeros of J 2 K=! ,the maximum value of localization produced is consider-ablylower.Q u a s i e n e r gyK/ω0.80.91L o c a l i z a t i o n K/ω01(b)(d)FIG.2(color online).(a)Quasienergy spectrum of a 2-site system,with U 8and ! 20.Only two of the three quasie-nergies are plotted (the remaining one oscillates weakly about zero),which make a series of close approaches to each other as K is increased.Solid lines in (a)and (c)(red online)denote the perturbative solutions,which agree well with the exact results (black circles).(b)At the points of close approach,the tunneling is suppressed and the localization peaks.For all field strengths the tunneling is suppressed with respect to the undriven system,and the localization is thus enhanced.(c)At lower frequencies the behavior of the quasienergies changes dramati-cally.At ! 8the system is at the first photon resonance (U !),and the behavior of the quasienergies is described extremely well by the perturbative solutions 0; 2J 1 K=! .(d)As before,the localization is peaked at the points of quasienergy crossing,but in contrast to (b)the peaks are extremely sharp.0K/ω00.51L o c a l i z a t i o nK/ω00.51L o c a l i z a t i o nsine wave square wave(a)(b)FIG.3(color online).Localization produced in a 7-site system (U 8)for two forms of periodic driving:(a)sinusoidal,(b)square wave.Both waveforms produce excellent localization at the first photon resonance,! U ,shown by solid black lines.At the second photon resonance (2! U ),shown by dashed lines (red online),the localization produced by the sinusoidal driving is considerably smaller,but the square wave still pro-duces high peaks.This poor localization occurs because not all of the quasienergy crossings in the Floquet spectrum of a many-site system will occur at precisely the same value of K=!;instead the various crossings occur over an inter-val.Thus although at the peaks in the localization many pairs of Floquet states will be degenerate(and tunneling between them will be suppressed),other state-pairs will only be approximately degenerate and will permit a small, but nonzero,degree of tunneling to occur.The major factors influencing this effect arise from higher-order terms in the expansion of the single-period time-evolution opera-tor U T;0 ,which manifest as multiparticle tunneling and tunneling beyond nearest neighbors.CDT is a quantum interference effect,which occurs when the dynamical phase acquired by a particle in a period of driving produces destructive interference,thereby suppressing the particle’s dynamics.If,however,a‘‘clump’’of n1bosons tunnels between sites,the dynamical phase will be n1times largerthan that for a single boson.Similarly,if a boson tunnels between two sites separated by n2>1lattice spacings,the dynamical phase will be n2times larger.For sinusoidal driving,the single-particle tunneling is suppressed when J n K=! 0;for these higher-order processes also to be suppressed we therefore also require J n n1n2K=! 0 for integers n1;n2 1;2...N.Clearly this condition cannot be satisfied for sinusoidal driving,as the zeros of J n x are not equally spaced.Thus to observe good localization properties at high photon resonances we need to construct a drivingfield f t such that the crossings in its Floquet spectrum are periodically spaced.This problem was confronted in a different context in Ref.[13],where it was shown that such afield must be discontinuous at changes of sign.Possibly the simplest field of this type,and the most convenient for experiment, is a square wavefield.In Fig.3(b)we show the localization obtained in a7-site system driven by a square ing the same perturba-tive approach as before,it may be shown that the quasi-energy degeneracies occur for K=! 2m 1or2m, depending on whether the order of the resonance n is odd or even.Unlike the case of sinusoidal driving,the n 2 resonance displays good localization,comparable to that obtained for n 1.A contour plot showing the localiza-tion as a function of both K=!and!ÿ1is presented in Fig.4.The prominent horizontal bands correspond to the photon resonances(!ÿ1 n=U),which are punctuated by a series of narrow peaks at which the localization is pre-served.This plot also clearly shows the division between the fairly featureless,poorly localized,‘‘weak-driving’’regime to the upper left,and the‘‘strong-driving’’regime which shows the resonance features.For the latter,the dynamics of the system are dominated by the combined effect of the drivingfield and the Hubbard interaction,and thus is well described by our form of perturbation theory.Figure4allows us to locate the boundary between the two regimes quite accurately as K=!’ 2U =!.In summary,we have investigated the dynamics of the BH model under a periodic drivingfield.For high frequen-cies[8]thefield can be used to inhibit tunneling by means of CDT and thus stabilize the MI state.Lowering the frequency,however,reveals the existence of resonance effects which can be used to selectively destroy or preserve the MI state.Lower driving frequencies have the added advantages in experiment that they heat the condensate less,and will not drive transitions to higher Bloch bands thereby invalidating the single band model.The extremely narrow width of the resonance features indicates that it should be possible to control the Mott transition very precisely in thismanner.[1]O.Morsch and M.Oberthaler,Rev.Mod.Phys.78,179(2006).[2] D.Jaksch et al.,Phys.Rev.Lett.81,3108(1998).[3] D.Jaksch et al.,Phys.Rev.Lett.82,1975(1999).[4]M.Greiner et al.,Nature(London)415,39(2002).[5] F.Grossmann,T.Dittrich,P.Jung,and P.Ha¨nggi,Phys.Rev.Lett.67,516(1991).[6]M.Grifoni and P.Ha¨nggi,Phys.Rep.304,229(1998).[7]G.Hur,C.E.Creffield,P.H.Jones,and T.S.Monteiro,Phys.Rev.A72,013403(2005).[8] A.Eckardt,C.Weiss,and M.Holthaus,Phys.Rev.Lett.95,260404(2005).[9]H.Sambe,Phys.Rev.A7,2203(1973).[10]M.Holthaus,Z.Phys.B89,251(1992).[11] C.E.Creffield and G.Platero,Phys.Rev.B65,113304(2002);66,235303(2002).[12] A.Eckardt,T.Jinasundera,C.Weiss,and M.Holthaus,Phys.Rev.Lett.95,200401(2005).[13]M.M.Dignam and C.M.de Sterke,Phys.Rev.Lett.88,046806(2002).K0.1250.250.3750.5123n=n=n=n=4FIG.4(color online).The localization produced in a5-site system with U 8as a function of the frequency!of the square wave drivingfield and its amplitude K.When n! U the localization is almost zero[the centers of the horizontal bands(blue online)]except at sharply defined peaks(red back-ground online).Between the bands localization is good.The n 1,2,3,and4resonances are marked on the right.The upper-left triangle(blue online)displays poor localization and little struc-ture,corresponding to the nonperturbative regime.。
环形剪切开孔软钢阻尼器的设计及力学分析

第43卷第1期 2021年2月Earthquake Resistant Engineering and Retrofitting工程抗震与加固改遗V 〇l. 43,N 〇. 1 Feb. 2021[文章编号]1002-8412 (2021) 01-0101-08D O I : 10. 16226/j.issn. 1002-8412. 2021. 01.014环形剪切开孔软钢阻尼器的设计及力学分析王磊1,杨明飞1,陈宜网2,沙志平1(1.安徽理工大学土木建筑学院,安徽淮南232001; 2.安徽圣沃建设工程有限公司,安徽合肥230031)[提要]为了改善矩形剪切钢板阻尼器在剪力作用下塑性分布不均且容易出现四周应力集中现象,提出了一种环形剪切开孔软钢阻尼器。
利用A N SY S 软件建立了该阻尼器的数值模型,并对其进行了力学分析。
分析过程中分别考虑了钢板厚度、 开孔数量和孔径大小等参数。
研究结果表明:环形剪切开孔软钢阻尼器屈服位移较小,滞回曲线饱满且稳定,耗能能力强。
阻尼器的初始刚度、最大恢复力及等效粘滞阻尼系数随着钢板厚度的增加而增大。
开孔率不超过18%时,其初始刚度、最大 恢复力及等效粘滞阻尼系数随着开孔数量和孔径大小的增加变化不大,说明阻尼器设计较为合理。
最后,通过分析给出了该 阻尼器的恢复力模型,并利用数值分析结果进行验证,显示其吻合度较高,能准确地描述该阻尼器的力学特性。
[关键词]环形剪切;软钢阻尼器;滞回曲线;开孔率;恢复力模型[中图分类号]TU391[文献标识码]ADesign and mechanical analysis of annular shear perforated mild steel damperWang Lei,Yang Ming-fei,Chen Yi-wang2,Sha Zhi-ping 1(1. School of Civil Engineering and A rchitecture, Anhui University of Science and Technology, Huainan 232001 , C hina ; 2. Anhui Shengwo Construction Engineering Co. L td,H efei 230031, C hina)A b s tra c t : In order to improve the plastic distribution of the rectangular shear steel plate dam per under the shear force and the surrounding stress concentration phenom enon, an annular shear perforated mild steel damper is proposed. The numerical model of the damper is established by ANSYS software and its mechanical analysis is carried out. Param eters such as steel plate thickness, num ber of holes and the size of the aperture are considered in the analysis. The results show that the yield displacem ent of the annular shear perforated mild steel dam per is sm all, the hysteresis curve is full and sta b le , and the energy consumption is strong. The initial stiffness, maximum restoring force and equivalent viscous damping coefficient of the dam per increase with the increase of the thickness of the steel plate. When the opening ratio is less than 18%, the initial stiffness, maximum restoring force and equivalent viscous damping coefficient change little with the increase of the number of holes and the size of the aperture, indicating that the dam per design is more reasonable. Finally, the restoring force model of the damper is given by analysis, and the num erical analysis results are used to verify the restoring force m odel, it shows a high degree of fit and accurately describes the mechanical characteristics of the damper.Key w ords : annular sh ear ; mild steel d am per ; hysteresis curve ; opening ratio ; restoring force model E -m ail :wanglei 1013_aust@ 随着土木工程结构抗震设计理论的发展,被 动消能减震技术[1]被广泛的引人到工程结构抗震设计中。
Computational Fluid Dynamics

Computational Fluid Dynamics Computational Fluid Dynamics (CFD) is a branch of fluid mechanics thatutilizes numerical methods and algorithms to solve and analyze problems that involve fluid flows. It has become an essential tool in various industries, including aerospace, automotive, and environmental engineering. CFD allows engineers and scientists to simulate and predict the behavior of fluid flows, which is crucial for optimizing designs and making informed decisions. However, despite its numerous advantages, CFD also presents several challenges and limitations that need to be addressed. One of the main benefits of CFD is its ability to provide detailed insights into complex fluid flow phenomena. By solving the governing equations of fluid dynamics using computational methods, CFD can generate visualizations and quantitative data that are difficult or impossible to obtain through experimental means. This capability is invaluable for understanding the behavior of fluids in different scenarios, such as airflow over an aircraft wing or water flow in a hydraulic system. Engineers can use CFD to identify areas of high turbulence, pressure gradients, and heat transfer, leading to improved designs and performance. Moreover, CFD enables virtual prototyping and testing, which can significantly reduce the time and cost associated with physical testing. Instead of building and testing multiple prototypes, engineers can use CFD to simulate different design iterations and operating conditions. This not only accelerates the design process but also allows for a more comprehensive exploration of the design space. By gaining a deeper understanding of fluid flow behavior early in the design phase, engineers can make informed decisions that lead to more efficient and reliable products. Furthermore, CFD plays a crucial role in optimizing the performance of existing systems and processes. Whether it's improving the aerodynamics of a race car, enhancing the efficiency of a cooling system, or minimizing the environmental impact of a power plant, CFD can help identify opportunities for improvement. By simulating different operating scenarios and design modifications, engineers can fine-tune existing systems to achieve better performance, reduced energy consumption, and lower emissions. Despite its many advantages, CFD also has several limitations and challenges that need to be addressed. One of the primary challenges is the computational costassociated with simulating complex fluid flow problems. Solving the governing equations of fluid dynamics requires significant computational resources, especially for high-fidelity simulations with fine spatial and temporal resolutions. As a result, CFD simulations can be time-consuming and require access to high-performance computing resources. Another challenge is the validation and verification of CFD simulations. While CFD can provide detailed insights intofluid flow behavior, it is essential to ensure that the simulations accurately represent real-world phenomena. This requires validation against experimental data and verification of the numerical methods and models used in the simulations. Without proper validation and verification, there is a risk of relying on inaccurate or misleading simulation results, leading to suboptimal designs or decisions. Additionally, CFD simulations are highly dependent on the accuracy of input data, including geometry, boundary conditions, and material properties. Small errors or uncertainties in the input data can lead to significant discrepancies in the simulation results. Therefore, it is crucial to carefully validate and calibrate input data to ensure the reliability of CFD simulations. Moreover, the complexity of fluid flow phenomena can pose challenges for CFD simulations. Turbulent flows, multiphase flows, and fluid-structure interactions are examples of complex phenomena that can be challenging to simulate accurately. These phenomena often require advanced turbulence models, multiphase flow models, and coupled solvers, which can introduce additional uncertainties and computational costs. In conclusion, Computational Fluid Dynamics (CFD) is a powerful tool that offers numerous benefits for engineers and scientists working with fluid flows. It enables detailed insights, virtual prototyping, and optimization of fluid flow systems. However, it also presents challenges related to computational cost, validation and verification, input data accuracy, and the complexity of fluid flow phenomena. Addressing these challenges requires a multi-faceted approach, including advancements in numerical methods, validation techniques, and computational resources. By overcoming these challenges, CFD can continue to play a crucial role in advancing engineering and scientific understanding of fluid flows.。
Omega

1
this leads to the London equations 11]
2r
r H + H = 0:
ห้องสมุดไป่ตู้
It follows from this equation, and this has been corroborated by experiments, that gives the depth of penetration of the magnetic eld. The London equations follow from the Ginzburg-Landau equations, which couple the electrodynamics to the dynamics of an order parameter, in the limit as = = gets arbitrarily large, where ; the so-called coherence length, represents the length scale on which the order parameter (density of superconductivity) varies 6]. Thus, the London equations represent a superconductor with zero sti ness in the order parameter. For high (type-II) superconductors, the London relation (1.1) needs to be modi ed 11]. It was observed that the Meissner phase obtains for magnetic elds below a certain critical eld Hc1 ; that the normal phase obtains above a higher critical eld Hc2 ; and that a di erent phase, the so-called Abrikosov-Shubnikov or mixed-state phase obtains for intermediate values of the magnetic eld between Hc1 and Hc2 : In this phase the magnetic eld penetrates the material in the form of quantized vortices; each vortex carries a quantum of ux, 0; known as a uxon. These vortices interact with each other, and move under the in uence of applied and induced currents. As ! 1; the di erence between Hc1 and Hc2 increases, so that for high{ materials, which include the high temperature superconductors, this mixed state is the phase of importance. The London equations for a single vortex lament ? are then
应用数字岩心对砂岩绝对渗透率研究
应用数字岩心对砂岩绝对渗透率研究杜建芬;魏博熙;郭平【摘要】岩石渗透率作为岩石固有的物性参数,对于研究流体在岩石中的渗流过程具有重要意义;然而传统的研究方法只是在数值方面的计算,并未结合流体的实际流线.通过结合传统计算方法与数字岩心技术,使用Avizo三维重建软件对渗透率的计算结果与流线结合可视化结合处理,可清晰观察到流体流动流线及流体渗透压力分布;并得到渗透率张量的计算结果.可从流线观察得到岩石渗透率的各向异向.通过与实验室岩心所测量结果相对比,发现二者误差极小,说明重建结果可信,可用于工程实际计算.通过对数字岩心进行三维模拟,可以使研究者得到更为直观的结果,有利于进行更加客观的分析,为油藏工作者分析岩石物性参数时提供了一种新的方法.【期刊名称】《科学技术与工程》【年(卷),期】2016(016)023【总页数】7页(P166-172)【关键词】数字岩心;绝对渗透率;渗透率张量;三维可视化【作者】杜建芬;魏博熙;郭平【作者单位】油气藏地质及开发工程国家重点实验室,西南石油大学,成都610500;油气藏地质及开发工程国家重点实验室,西南石油大学,成都610500;油气藏地质及开发工程国家重点实验室,西南石油大学,成都610500【正文语种】中文【中图分类】TE311;TE319当研究储层时,最令油藏工程师关心的是油藏岩石的两个物性——储集性和渗透性。
岩样的储集性描述的是油藏单位体积岩石中储量的大小,而岩石的渗透性则直接影响到油、气井的产能[1]。
利用三维数字岩心技术研究岩石的渗透性,将得到更为直观和可靠的结果。
近年来,国外学者对数字岩心的研究取得了较大的突破,如挪威的Numerical Rock团队、澳大利亚国立大学的Arns、Knackstedt等人、英国帝国理工学院的Blunt、Hu等[2]、美国三塔釜大学的Keehm、Sain等人以及美国的数字岩石物理公司Ingrain。
相比之下,国内对数字岩心的研究还处于初级阶段,中国石油大学的姚军教授及其团队[3]以及西南石油大学的刘向君教授[4]及其团队开展了一系列渗流模拟研究,并取得了一定的成果。