2计算机控制分析方法2003 [兼容模式]
计算机控制实验指导书
目录一.计算机控制实验指导1.概述 (1)2.实验一A/D与D/A 转换 (3)3.实验二数字滤波 (7)4.实验三 D(s)离散化方法的研究 (9)5.实验四数字PID控制算法的研究 (13)6.实验五串级控制算法的研究 (16)7.实验六解耦控制算法的研究 (19)8.实验七最少拍控制算法的研究 (23)9.实验八具有纯滞后系统的大林控制 (28)10.实验九线性离散系统的全状态反馈控制 (30)11.实验十二维模糊控制器 (33)12.实验十一单神经元控制器 (36)二.计算机控制对象实验指导1.实验一直流电机转速计算机控制实验 (39)2.实验二水箱液位计算机控制实验 (41)三.计算机控制软件说明1.概述 (43)2.安装指南及系统要求 (48)3.LabVIEW编程及功能介绍 (49)5.附录 (78)概述一.系统功能特点1.以PC微机为操作台,高效率支持“计算机控制”的教学实验。
2.系统含有高阶电模拟单元,可根据教学实验需要进行灵活组合,构成各种典型环节与系统。
3.系统含有界面友好、功能丰富的软件。
PC微机在实验中,除了用作实验测试所需的虚拟仪器外,还可用作测试信号发生器以及具有很强柔性的数字控制器。
4.系统的硬件、软件设计,充分考虑了开放型、研究型实验的需要。
可自己设计实验内容,构建系统对象,编写控制算法,进行计算机控制技术的研究。
二.系统构成实验系统由上位PC微机(含实验系统上位机软件)、ACCT-I实验箱、USB2.0通讯线等组成。
ACCT-I实验箱内装有以C8051F060芯片(含数据处理系统软件)为核心构成的数据处理卡,通过USB口与PC微机连接。
1.ACCT-I实验箱简介ACCT-I实验箱是一个通用的实验箱。
它主要由电源部分U1单元,信号源部分U2单元,与PC机进行通讯的数据处理单元U3,元器件单元U4,非线性单元U5,U6,U7,模拟电路单元U8~U16组成,详见附图。
计算机控制试题及答案
计算机控制试题及答案一、单项选择题(每题1分,共10分)1. 计算机控制系统中,以下哪个不是典型的控制策略?A. 比例控制B. 积分控制C. 微分控制D. 模糊控制答案:D2. 在计算机控制系统中,系统响应时间指的是:A. 系统从接收到控制命令到开始执行的时间B. 系统从接收到控制命令到完成执行的时间C. 系统从接收到控制命令到输出结果的时间D. 系统从接收到控制命令到输出稳定结果的时间答案:D3. 以下哪个不是计算机控制系统的优点?A. 精度高B. 响应快C. 易于维护D. 能耗高答案:D4. 在计算机控制系统中,闭环控制系统与开环控制系统的主要区别在于:A. 是否有反馈B. 是否有传感器C. 是否有执行器D. 是否有控制器答案:A5. 计算机控制系统的稳定性分析通常采用哪种方法?A. 频率响应法B. 时域分析法C. 状态空间法D. 所有上述方法答案:D6. 在计算机控制系统中,以下哪个参数不是系统性能指标?A. 稳态误差B. 响应时间C. 系统复杂度D. 带宽答案:C7. 以下哪个不是计算机控制系统的组成部分?A. 传感器B. 执行器C. 显示器D. 电源答案:D8. 计算机控制系统中,以下哪个不是典型的干扰?A. 电源波动B. 温度变化C. 机械振动D. 人为操作答案:D9. 在计算机控制系统中,以下哪个不是控制器的设计方法?A. PID控制B. 模糊控制C. 神经网络控制D. 机械控制答案:D10. 计算机控制系统的实时性要求是指:A. 系统响应时间必须小于一个固定的阈值B. 系统响应时间必须大于一个固定的阈值C. 系统响应时间必须等于一个固定的阈值D. 系统响应时间可以是任意值答案:A二、多项选择题(每题2分,共10分)1. 计算机控制系统的输入设备包括:A. 传感器B. 键盘C. 鼠标D. 扫描仪答案:A2. 计算机控制系统的输出设备包括:A. 显示器B. 打印机C. 执行器D. 扬声器答案:C3. 计算机控制系统的设计目标通常包括:A. 稳定性B. 快速性C. 准确性D. 经济性答案:A, B, C, D4. 计算机控制系统的干扰可能来自:A. 电源B. 环境C. 人为操作D. 系统内部答案:A, B, C, D5. 计算机控制系统的稳定性分析方法包括:A. 根轨迹法B. 奈奎斯特准则C. 李雅普诺夫方法D. 频域分析答案:A, B, C, D三、简答题(每题5分,共20分)1. 简述计算机控制系统的工作原理。
计算机控制技术教材习题解答

计算机控制技术习题解答第一章什么是计算机控制系统计算机控制系统由哪几部分组成答:计算机控制系统就是利用计算机通常称为工业控制计算机,简称工业控制机来实现生产过程自动控制的系统;计算机控制系统的组成:计算机控制系统由计算机工业控制机和生产过程两大部分组成;、微型计算机控制系统的特点是什么微机控制系统与常规的自动控制系统相比,具有如下特点:a.控制规律灵活多样,改动方便b.控制精度高,抑制扰动能力强,能实现最优控制c.能够实现数据统计和工况显示,控制效率高d.控制与管理一体化,进一步提高自动化程度计算机控制系统结构有哪些分类指出这些分类的结构特点和主要应用场合;答:1操作指导控制系统优点:结构简单,控制灵活,安全;缺点:由人工操作,速度受到限制,不能控制多个对象;2直接数字控制系统DDS优点:实时性好,可靠性高,适应性强;3监督控制系统SCC优点:生产过程始终处于最优工况;4分散控制系统DCS优点:分散控制、集中操作、分级管理、分而自治和综合协调;5现场总线控制系统FCS优点:与DCS相比,降低了成本,提高了可靠性;国际标准统一后,可实现真正的开放式互联系统结构;.计算机控制系统的控制过程是怎样的计算机控制系统的控制过程可归纳为以下三个步骤:1实时数据采集:对被控量的瞬时值进行检测,并输入给计算机;2实时决策:对采集到的表征被控参数的状态量进行分析,并按已定的控制规律,决定下一步的控制过程;3实时控制:根据决策,适时地对执行机构发出控制信号,完成控制任务;.实时、在线方式和离线方式的含义是什么答:所谓实时,是指信号的输入、计算和输出都要在一定的时间范围内完成,亦即计算机对输入信息,以足够快的速度进行控制,超出了这个时间,就失去了控制的时机,控制也就失去了意义;在计算机控制系统中,生产过程和计算机直接连接,并受计算机控制的方式称为在线方式或联机方式;生产过程不和计算机相连,且不受计算机控制,而是靠人进行联系并做相应操作的方式称为离线方式或脱机方式;操作指导、DDC和SCC系统的工作原理如何它们之间有何区别和联系1操作指导控制系统:在操作指导控制系统中,计算机的输出不直接作用于生产对象,属于开环控制结构;计算机根据数学模型、控制算法对检测到的生产过程参数进行处理,计算出各控制量应有的较合适或最优的数值,供操作员参考,这时计算机就起到了操作指导的作用;其原理框图如图所示;图操作指导控制系统原理框图2直接数字控制系统DDC系统:DDCDirect Digital Control系统就是通过检测元件对一个或多个被控参数进行巡回检测,经输入通道送给微机,微机将检测结果与设定值进行比较,再进行控制运算,然后通过输出通道控制执行机构,使系统的被控参数达到预定的要求;DDC系统是闭环系统,是微机在工业生产过程中最普遍的一种应用形式;其原理框图如图所示;图 DDC系统原理框图3计算机监督控制系统SCC系统:SCCSupervisory Computer Control系统比DDC系统更接近生产变化的实际情况,因为在DDC系统中计算机只是代替模拟调节器进行控制,系统不能运行在最佳状态,而SCC 系统不仅可以进行给定值控制,并且还可以进行顺序控制、最优控制以及自适应控制等;SCC系统的原理框图如图所示;图 SCC系统原理框图SCC是操作指导控制系统和DDC系统的综合与发展;1.7计算机控制系统的发展趋势是什么计算机控制将在以下方面得到发展:1推广应用成熟的先进技术,普及应用可编程序控制器PLC,广泛使用智能调节器,采用新型的DCS和FCS;2大力研究和发展智能控制系统;当前最流行的控制系统有:分级递阶智能控制系统,模糊控制系统,专家控制系统,学习控制系统,神经控制系统;1.以工业PC 为基础的低成本工业控制自动化将成为主流2.PLC在向微型化、网络化发展3.面向测控管一体化设计的DCS系统4.控制系统正在向现场总线FCS方向发展5.计算机控制软件正向先进控制方向发展第二章什么是过程通道过程通道有哪些分类过程通道是在计算机和生产过程之间设置的信息传送和转换的连接通道;按信息传递的方向来分,过程通道可分为输入过程通道和输出过程通道;按所传递和交换的信息来分,过程通道又可分为数字量过程通道和模拟量过程通道;数字量过程通道由哪些部分组成各部分的作用是什么数字量过程通道包括数字量输入通道和数字量输出通道;数字量输入通道主要由输入缓冲器、输入调理电路、输入地址译码电路、并行接口电路和定时计数电路等组成;数字量输出通道主要由输出锁存器、输出驱动电路、输出口地址译码电路等组成;其中:输入调理电路将来自控制装置或生产过程的各种开关量,进行电平转换,将其通断状态转换成相应的高、低电平,同时还要考虑对信号进行滤波、保护、消除触点抖动,以及进行信号隔离等问题;简述两种硬件消抖电路的工作原理;采用积分电路的硬件消抖电路,首先利用积分电路将抖动的高频部分滤出,其次利用施密特触发器整形;采用RS触发器的硬件消抖电路,主要是利用RS触发器的保持功能实现消抖;简述光电耦合器的工作原理及在过程通道中的作用;光电耦合器由封装在一个管壳内的发光二极管和光敏三极管组成,如下图所示;输入电流流过二极管时使其发光,照射到光敏三极管上使其导通,完成信号的光电耦合传送,它在过程通道中实现了输入和输出在电气上的完全隔离;光电耦合器电路图模拟量输入通道由哪些部分组成各部分的作用是什么模拟量输入通道一般由I/V变换、多路转换器、采样保持器、A/D转换器、接口及控制逻辑电路组成;1I/V变换:提高了信号远距离传递过程中的抗干扰能力,减少了信号的衰减,为与标准化仪表和执行机构匹配提供了方便;2多路转换器:用来切换模拟电压信号的关键元件;3采样保持器:A/D 转换器完成一次A/D 转换总需要一定的时间;在进行A/D 转换时间内,希望输入信号不再变化,以免造成转换误差;这样,就需要在A/D 转换器之前加入采样保持器;4A/D 转换器:模拟量输入通道的任务是将模拟量转换成数字量,能够完成这一任务的器件,称为之模/数转换器Analog/Digital Converter,简称A/D 转换器或ADC;对理想多路开关的要求是什么理想的多路开关其开路电阻为无穷大,其接通时的导通电阻为零;此外,还希望切换速度快、噪音小、寿命长、工作可靠;采样保持器有什么作用 试说明保持电容的大小对数据采集系统的影响;采样保持器的作用:A/D 转换器完成一次A/D 转换总需要一定的时间;在进行A/D 转换时间内,希望输入信号不再变化,以免造成转换误差;这样,就需要在A/D 转换器之前加入采样保持器;保持电容对数据采集系统采样保持的精度有很大影响;保持电容值小,则采样状态时充电时间常数小,即保持电容充电快,输出对输入信号的跟随特性好,但在保持状态时放电时间常数也小,即保持电容放电快,故保持性能差;反之,保持电容值大,保持性能好,但跟随特性差;在数据采样系统中,是不是所有的输入通道都需要加采样保持器为什么不是,对于输入信号变化很慢,如温度信号;或者A/D 转换时间较快,使得在A/D 转换期间输入信号变化很小,在允许的A/D 转换精度内,就不必再选用采样保持器;A/D 转换器的结束信号有什么作用根据该信号在I/O 控制中的连接方式,A/D 转换有几种控制方式它们在接口电路和程序设计上有什么特点A/D 转换器的结束信号的作用是用以判断本次AD 转换是否完成;常见的A/D 转换有以下几种控制方式,各自特点如下延时等待法:EOC 可不和I/O 口连接,程序设计时,延时大于ADC 转换时间后,取数据;保持等待法:EOC 与READY 相连,EOC 无效时,自动插入等待状态;直至EOC 有效时,取数据;查询法: EOC 可以和任意I/O 口连接,程序设计时,反复判断EOC 是否有效,直至EOC 有效时,取数据; 中断响应法: EOC 与外部中断相连,AD 转换结束后,发中断申请,在中断服务程序中取数据;假设被测温度变化范围为0o C ~1200o C,如果要求误差不超过,应选用分辨率为多少位的A/D 转换器 选择依据:124.0120012log ≈⎪⎭⎫ ⎝⎛+≥n 设计8路模拟量采集系统;请画出接口电路原理图,并编写相应的8路模拟量数据采集程序; 本例给出用8031、DAC0809设计的数据采集系统实例;把采样转换所得的数字量按序存于片内RAM 的30H~37H 单元中;采样完一遍后停止采集;其数据采集的初始化程序和中断服务程序如下:初始化程序:MOV R0,30H ;设立数据存储区指针MOV R2,08H ;设置8路采样计数值SETB IT0 ;设置外部中断0为边沿触发方式SETB EA ;CPU 开放中断SETB EX0 ;允许外部中断0中断MOV DPTR,FEF8H ;送入口地址并指向IN0LOOP : MOVX DPTR,A ;启动A/D 转换,A 的值无意义HERE : SJMP HERE ;等待中断中断服务程序:MOVX A,DPTR ;读取转换后的数字量MOV R0,A ;存入片内RAM 单元INC DPTR ;指向下一模拟通道INC R0 ;指向下一个数据存储单元DJNZ R2,INT0 ;8路未转换完,则继续CLR EA;已转换完,则关中断 CLR EX0 ;禁止外部中断0中断RETI ;中断返回INT0: MOVX DPTR,A ;再次启动A/D 转换RETI;中断返回 模拟量输出通道由哪几部分组成各部分的作用是什么模拟量输出通道一般由接口电路、D/A 转换器、功率放大和V/I 变换等信号调理电路组成;1D/A 转换器:模拟量输出通道的核心是数/模转换器Digital/Analog Converter,简称D/A 转换器或DAC;它是指将数字量转换成模拟量的元件或装置;2V/I 变换:一般情况下,D/A 转换电路的输出是电压信号;在计算机控制系统中,当计算机远离现场,为了便于信号的远距离传输,减少由于传输带来的干扰和衰减,需要采用电流方式输出模拟信号;许多标准化的工业仪表或执行机构,一般是采用0~10mA 或4~20mA 的电流信号驱动的;因此,需要将模拟电压信号通过电压/电流V/I 变换技术,转化为电流信号;采用74LS138、DAC0832运算放大器和CD4051等设计D/A 转换接口电路,设定DAC0832的端口地址为200H,CD4051的端口地址为201H;要求:1画出D/A 转换接口电路;2编写D/A 转换程序;解 1 D/A 转换接口电路;地址线A9 A8……A1 A0=10……00时端口地址0200H,选通DAC0832地址线A9 A8……A1 A0=10……01时端口地址0201H 选通CD40512 编写D/A 转换程序;DOUT PROC NEARMOV DX,200HMOV CX,8MOV AH,0MOV BX,OFFSET BUFNEXT: MOV AL,BXOUT DX,ALINC DXMOV AL,AHOUT DX,ALCALL DELAYINC AHDEC DXINC BXLOOP NEXTRETDOUT ENDP 第三章试求下列函数的z 变换125()e t f t t -=解 223(1)[](1)T z z Z t z +=-由位移定理2(t)1e akT f -=- 解:)(1()(1)()aT aT z e F z z z e ---=-- 3()sin f t t t ω=由Z 变换的性质 421()(2)F s s =+ 解:222()()TT zTe F z z e --=- 5()()K F s s s a =+ 解 将FS 展开成部份分式将上式进行z 反变换并整理即得 61()(2)s F s s s +=+ 解: 111()[]22F s s s =++ 将上式进行Z 反变换得;、试求下列函数的z 反变换 1(z)0.1z F z =- 解:查表可得 ()(0.1)kT f kT = k=0,1,2,…. 2(1e )()(1)(e )T T z F z z z ---=-- 答:()1kT f kT e-=- k=0,1,2, (32)(2)()(1)z z F z z +=- 解:将Fz/z 展开为下列部份分式之和留数法123,1r r ==于是 23()(1)1z z F z z z =+-- z 反变换即得:()31f kT k =+ k=0,1,2,…. 4223()21z z F z z z -+=-+ 解: 用长除法可得用部分分式法 56()(1)(5)z F z z z =++ 解:Z 反变换得:求下列函数的终值;1220.792()(1)(0.4160.208)z F z z z z =--+ 解 1110.792()lim(1z )()lim110.4160.208z z z f F z z -→→∞=-==-+ 22()(0.1)(0.8)z F z z z =-- 答: 11()lim(1z )()0z f F z -→∞=-=. 用z 变换法求解下列差分方程其中()u kT 为单位阶跃序列,系统输出的初始条件为(0)1() 2.4y y T ==,;解:对系统的差分方程进行Z 变换,于是有由上式,系统的Z 域表示式为将()[1()]1z U z Z k z ==- 以及初始条件代入并进行部份分式展开得 对他们取Z 反变换则可求得:系统的零输入响应系统的零状态响应故在输入信号作用下,系统的时间响应为:. 已知线性离散系统的方框图如图所示,试求系统的闭环脉冲传递函数解于是 12110100.950()10.9050.905z z z G G z z z z z -⎛⎫=-= ⎪---⎝⎭ 由12120.950()0.9500.905()0.9501()0.9500.95010.905KKG G z K z z KG G z z KK z -Φ===+-++- 已知离散控制系统的结构如图所示,当求当T = 1 s 时,能使系统稳定的K 值的范围; 答: 通过Z 变换得开环传递函数因为T=1所以 222[(1)(12)]()4(1)(2)K e z e e G z z z e ---++-+=--- 由上式可得系统的闭环传递函数为闭环方程为22222()4[(1)4(1)][(13)4]D Z z K e e z K e e ----=+--++-+ 由系统稳定的条件1z <求解得K 的取值范围为设有单位反馈误差采样系统,连续部份传递函数为输入()1()r t t =,采样周期 1 s T =,试求1输出z 变换()Y z ;2采样瞬时的输出响应*()y t ;3输出响应的终值()y ∞;解1依题意得2*()0.1597()0.4585(2)0.842(3) 1.235(4)y t t T t T t T t T δδδδ=-+-+-+-+3判断系统稳定性3n = 奇数D1=>0, D-1=<0列朱列表 0262.497649.64b b =<= 不稳定闭环系统不稳定,求终值无意义;。
微型计算机控制技术 第2版 习题答案
书后习题参考答案第一章习题1答:微型计算机控制系统是利用计算机(通常采用工业控制计算机,简称工控机)来实现生产过程自动控制的系统,它由控制计算机本体(包括硬件、软件和网络结构)和被控对象两大局部组成。
微型计算机控制系统是实时系统,也是在线系统。
2答:计算机做控制器用。
控制系统中引进计算机,可以充分运用计算机强大的运算、逻辑判断和记忆等功能。
只要运用微处理器的各种指令,就能编出符合某种控制规律的程序。
微处理器执行该程序,就能实现对被控参数的控制。
输入信息来自于各种传感器,输出信息用于驱动执行机构。
3答:如果计算机能够在工艺要求的时间范围内及时对被控参数进行测量、计算和控制输出,那么称为实时控制。
实时的概念不能脱离具体过程,一个在线的系统不一定是一个实时系统,但一个实时控制系统必定是在线系统。
4答:微型计算机控制系统硬件一般包括:计算机主机、输入/输出(I/O)接口、I/O通道、传感器及变送器、执行机构、人机联系设备(如键盘和显示器)、网络通信接口和电源等。
它们通过微处理器的系统总线(地址总线、数据总线和控制总线)构成一个完整的系统。
计算机的输入/输出通道,又称过程通道。
为了实现计算机对生产过程的控制,必须在计算机和生产过程之间设置信息的传递和变换的连接通道,这就是过程输入/输出通道。
过程通道一般可分为:模拟量输入通道、模拟量输出通道、数字量输入通道、数字量输出通道5答:操作指导控制系统:优点是结构简单,控制灵活和平安。
缺点是要由人工操作,速度受到限制,不能控制多个对象。
直接数字控制系统:优点是实时性好、可靠性高和适应性强,可控制多个回路。
缺点是修改控制器参数不方便。
监督控制系统:优点是能自动改变模拟调节器或以直接数字控制方式工作的微型计算机中的给定值, 从而使生产过程始终处于最优工况。
集散控制系统:优点是分散控制、集中操作、分级管理、分而自治和综合协调。
缺点是不同厂商的设备不能通用。
现场总线控制系统:具备集散控制系统的优点,因为采用标准总线设计,不同厂商设备通用性好,组网方便。
计算机控制(第六章,数字控制系统)
第六章
数字控制系统理论及分析
一、概述
计算机控制系统是指以计算机作为控制器的控制系统,有 时也称为离散控制系统、数字控制系统和采样控制系统等。数 字控制器为其核心。 下图为计算机控制系统框图
系统中的信号是混合式的,计算机的输入、输出为数字量, 系统其它部分信号为连续的模拟量。 计算机需要接受的数字信号是时间上离散、量值上数字化 的信号。
则上式可改写为:
F ( z ) Z f (t ) f (kT) z k
k 0
包含了信号幅值 信息和时间信息
F ( z )表征了f (t )在采样时刻的特性
z 1称为单位延迟因子
称为离散信号 f (t ) 的Z变换,习惯上也称为 f (t )或F ( s) 的Z变换。
ze
基本一致且时间滞后T/2
脉冲响应函数:
传递函数:
1 e jT sin T / 2 jT / 2 其频率特性函数为: H 0 ( j ) T e j T / 2 sin T / 2 幅频特性为: (j) T H0 T / 2 其幅频、相频特性图线为: 相频特性为:0 )=-T / 2 k (
k 0
存在条件是
z 1,而 z e e Res 0
Ts T
1 z 1 z 1 z 1
例2、已知 f (t ) e
at
, a 0, 求Z e at
aTk
F ( z ) Z [ f (t )] e
k 0
设t 0时,f (t ) 0, 则有Z [ f (t kT)] z k F ( z )
(3)超前定理
《计算机控制及网络技术》-第4章 计算机控制系统分析

z x y 1
2 2
z x y 1
2 2
z平面与w平面映射关系
由此可见,变换把z平面上的单位圆映射为w平面 上的虚轴;把z平面上的单位圆内区域映射为w平面上 的左半部;把z平面上的单位圆外区域映射为w平面上 的右半部。
2 z 1 2 e jT 1 2 e jT / 2 e jT / 2 w jT T z 1 z e jT T e 1 T e jT / 2 e jT / 2 2 T j tan T 2
1
0.368 z 0.264 2 z 1.368 z 0.368
闭环脉冲传递函数为
( z )
系统特征方程为
0.368 z 0.264 z 2 z 0.632
z z 0.632 0
2
采用双线性变换,即 z 1 wT / 2 ,则可得w平面的特征 1 wT / 2 方程为
1 0.5 w
K (0.368 z 0.624) 1 2 z 1.368 z 0.368 z 10.5 w
1 0.5 w
(1 0.0381K ) w2 (0.924 0.386 K ) w 0.924 K w( w 0.924)
即特征方程为
(1 0.0381K )w2 (0.924 0.386K )w 0.924K 0
jT
T
j (T 2k )
, k 0, 1, 2,
极座标形式
于是,s域到z域的基本映射关系式为
z eT , T
模大小
S平面等衰减线
s平面左半平面的垂直线(等衰减线)对应
于z平面半径小于1的圆
s平面右半平面的垂直线对应于z平面半径 大于1的圆
微型计算机控制技术_第1章 [兼容模式]
![微型计算机控制技术_第1章 [兼容模式]](https://img.taocdn.com/s3/m/68f1a30ba6c30c2259019efd.png)
退出
《计算机控制技术》
1.2 计算机控制系统的典型形式
1.2.1 操作指导控制系统
优点是结构简单,控制灵活和安全。 缺点是要由人工操作,开环结构,控制的实时性差,不能 控制多个对象。
退出
《计算机控制技术》
1.2.2 直接数字控制(DDC)系统
闭环结构,控制的实时性好,可以控制多个回路或对象。
《计算机控制技术》
1.1.2 计算机控制系统的组成
计算机控制系统由计算机(工业控制机)和生产过程两大部分 组成。
1.工业控制机 (1)硬件组成: (2)软件组成: 系统软件;应用软件。 2.生产过程
退出
《计算机控制技术》
1.1.3 常用的计算机控制系统主机 1. 2. 3. 4. 5. 可编程序控制器(PLC) 工控机(IPC) 单片机 DSP 智能调节器
《计算机控制技术》
RS-232C信号状态 状态 逻辑状态 信号条件 功能 -15V<V1<-5V 1 传号(MARK) OFF +5V<V1<+15V 0 空号(SPACE) ON
RS-232C电平转换及接口电路
退出
《计算机控制技术》
2)USB串行通信总线
(1)具有热插拔功能 (2)USB采用“级联”方式连接各个外部设备 (3)适用于低速外设连接
退出
《计算机控制技术》
3)PCI总线信号定义
主控设备49条,目标设备 47条,可选引脚 51条(主要 用于64位扩展、中断请求、高 速缓存支持等),总引脚数 120条(包含电源、地、保留 引脚等)。
4)Compact PCI总线
退出
《计算机控制技术》
2 外部总线
1)RS-232串行通信总线
计算机控制技术(第二版)课后习题答案(王建华主编)
计算机控制技术课后习题答案第一章绪论1.计算机控制系统的控制过程可归纳为以下三个步骤:P2(1)实时数据采集:对来自测量变送装置的被控量的瞬时值进行检测和输入(2)实时决策:对采集到的被控量进行分析和处理,并按预定的控制规律,决定将要采取的控制策略。
(3)实时控制:根据控制决策,适时地对执行机构发出控制信号,完成控制任务。
2 .计算机控制系统是由哪几部分组成?画出方块图并说明各部分的作用。
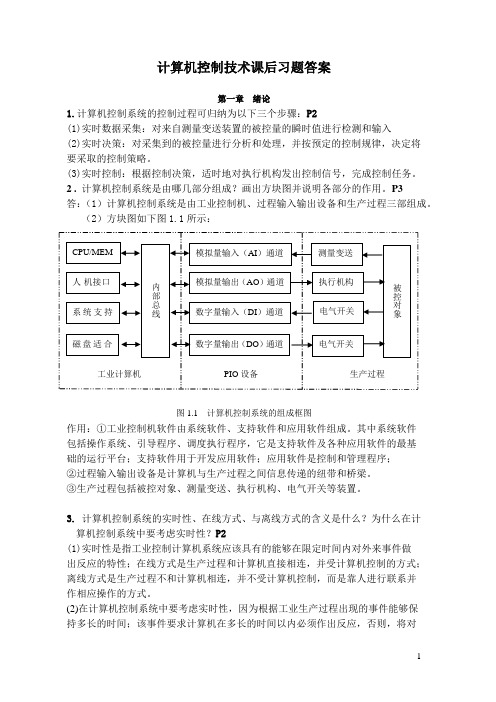
P3答:(1)计算机控制系统是由工业控制机、过程输入输出设备和生产过程三部组成。
(2)方块图如下图1.1所示:图1.1 计算机控制系统的组成框图作用:①工业控制机软件由系统软件、支持软件和应用软件组成。
其中系统软件包括操作系统、引导程序、调度执行程序,它是支持软件及各种应用软件的最基础的运行平台;支持软件用于开发应用软件;应用软件是控制和管理程序;②过程输入输出设备是计算机与生产过程之间信息传递的纽带和桥梁。
③生产过程包括被控对象、测量变送、执行机构、电气开关等装置。
3. 计算机控制系统的实时性、在线方式、与离线方式的含义是什么?为什么在计算机控制系统中要考虑实时性?P2(1)实时性是指工业控制计算机系统应该具有的能够在限定时间内对外来事件做出反应的特性;在线方式是生产过程和计算机直接相连,并受计算机控制的方式;离线方式是生产过程不和计算机相连,并不受计算机控制,而是靠人进行联系并作相应操作的方式。
(2)在计算机控制系统中要考虑实时性,因为根据工业生产过程出现的事件能够保持多长的时间;该事件要求计算机在多长的时间以内必须作出反应,否则,将对生产过程造成影响甚至造成损害。
4. 计算机控制系统有哪几种典型形式?各有什么主要特点?P4~7(1)操作指导系统(OIS)优点:结构简单、控制灵活和安全。
缺点:由人工控制,速度受到限制,不能控制多个对象。
(2)直接数字控制系统(DDC)优点:实时性好、可靠性高和适应性强。
(3)监督控制系统(SCC)优点:生产过程始终处于最有工况。
2003版多选题与答案
多选题及答案第二部分多选题及答案1.以下选项中()是计算机的特点。
A. 运算速度快B. 运算精度高C. 体积小D. 具有自动编程能力正确答案:A. B.2.当前普遍使用的微型计算机,所采用的逻辑元件是()。
A. 电子管B. 超大规模集成电路C. 晶体管D. 大规模集成电路正确答案:B. D.3.计算机的应用领域有科学计算及()等。
A. 建筑B. 数据处理C. 纺织D. 过程控制正确答案:B. D.4.计算机的发展方向是智能化及()。
A. 巨型化B. 微型化C. 科学化D. 网络化正确答案:A. B. D.5.高级语言是同()比较接近的计算机程序设计语言。
A. 机器语言B. 自然语言C. 汇编语言D. 数学语言正确答案:B. D.6.由高级语言编写的源程序必须由()进行处理后,机器才能识别和执行。
A. 汇编程序B. 解释程序C. 编译程序D. 目标程序正确答案:B. C.7.常见的语言处理程序有()。
A. 汇编程序B. 编译程序C. 目标程序D. 解释程序正确答案:A. B. D. 8.高级语言的翻译程序有()程序。
A. 编译B. 解释C. 汇编D. 诊断正确答案:A. B.9.下列四组均属于高级语言的是()。
A. C语言、PASCAL语言B. 机器语言、PASCAL语言C. 汇编语言、C语言D. FORTRAN语言、BASIC语言正确答案:A. D.10.应用软件分为()。
A. 通用的应用软件B. 数据库软件C. 专用的应用软件D. 网络软件正确答案:A. C.11.计算机的分类包括()。
A. 巨型机、大型机B. 小型机和微型机C. 监控机D. 控制机正确答案:A. B.12.微机的使用环境是指()。
A. 温度B. 洁净度C. 湿度D. 噪音正确答案:A. C.13.1GB等于()。
A. 1024KBB. 1024MBC. 1024×1024KBD. 1024×1024×1024B正确答案:B. C. D.14.U盘具有容量大、()、不需要驱动器和通用USB接口等特点。
计算机控制系统的经典设计方法-精品文档

经ZOH后:
j T 1 e u ( j ) E * ( j ) D * ( j ) D j
j T 1 e s i n ( T / 2 ) j T / 2 G ( j ) T e Z O H j T / 2
ZOH传递函数:
s i n ( T / 2 ) u ( j) e D * ( j) E ( j j n ) D s T / 2 n
② 一阶保持器z变换法(斜坡响应不变法)
由于和零阶保持器z变换法类似的原因,这种方法应用的较少。
10
2. 一阶向后差分法
(1)离散化公式
实质:将连续域中的微分 用一阶向后差分替换
d c ( t ) / d t c ( k ) c ( k 1 ) ] / T tk T[
s与z之间的变换关系: (直接代入)
2
2
2
j T j T / 2 j T / 2 D D D 2 1e 2 e e j j A D j D T T / 2 j / 2 D T 1e T e e T
图5-10 双线性变换映射关系
2s ji n ( T / 2 ) 2 T 2 D j t a nD T 2 c o s ( T / 2 ) T 2 D
j T / 2 必有: D * ( j ) e D ( j )
补偿器 模拟控制器
uj ( )e D
jT / 2
D * ( j )( E j)
数字控制器
补偿器:补偿ZOH带来的相位延迟-T/2 当T较小时可以忽略其影响,可以不补偿
7
连续域-离散化设计的步骤如下:
计算机控制技术第3章 计算机控制系统分析
第3章 计算机控制系统分析 y(t) 1.6 1.4
a b
1.2
1 0.8 0.6 0.4 0.2 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 t
第3章 计算机控制系统分析
(2) 现将图中的保持器去掉,k=1,T=τ=1;则
G (z)
W (z)
0 . 632 z (1 z
由此可见,离散系统的时间响应是它各个 极点时间响应的线性叠加。
第3章 计算机控制系统分析
设系统有一个位于zi的单极点,则在单位脉冲 作用下,当zi位于Z平面不同位置时,它所对应的 脉冲响应序列如图所示。
jIm j -1 0 -j 1 Re
第3章 计算机控制系统分析
极点在单位圆外的正实轴上,对应的暂态响应 分量y(kT)单调发散。 极点在单位圆与正实轴的交点,对应的暂态响 应y(kT)是等幅的。
第3章 计算机控制系统分析
离散系统的稳定性分析
jω [S] 0
1 对应关系
jIm j -1 0 [Z]
1
Re
2 直接稳定判断
δ
j
3 W变换,Routh稳定性判断
j
ω
0
[W]
δ
第3章 计算机控制系统分析
离散系统的过渡响应分析
一个控制系统在外信号作用下从原有稳定 状态变化到新的稳定状态的整个动态过程称之为 控制系统的过渡过程。 一般认为被控变量进入新稳态值附近±5% 或±3%的范围内就可以表明过渡过程已经结束。 通常,线性离散系统的动态特征是系统在单 位阶跃信号输入下的过渡过程特性(或者说系统 的动态响应特性)。如果已知线性离散系统在阶 跃输入下输出的Z变换Y(z),那么,对Y(z)进行Z 反变换,就可获得动态响应y*(t)。将y*(t)连成光 滑曲线,就可得到系统的动态性能指标(即超调 量σ%与过渡过程时间ts)。
计算机控制系统:第3章 计算机控制技术1

求f(t)的Z变换。
1 k=0
解: 因为: (kT)
0 k≠0
根据Z变换定义: F(z) £[ (t)] (kT)z k =1 k 0
March 30, 2021
第5章 数字控制器的设计
8
1、Z变换定义及表达式
(2)单位阶跃函数
f (t)
σ(t)=1 t≥ 0
0
t<0
求f(t)的Z变换。
n)
通过长除法得到幂级数展开式
F (z) f (0)z0 f (T )z 1 f (2T )z 2 ... f (kT )z k ...
March 30, 2021
第5章 数字控制器的设计
24
3、z反变换
2z 1 例题:求 z2 z 的z反变换,并写出前五项。
例题:求
z2 z3 4z2 5z 2
设定f(t)的Z变换F(z)存在,且对于t<0, f(t)=0 1)乘以常数 如果f(t)的£[aZf变(t)换] 为a £[Ff((zt))], aaF是(z一) 个常数,则
March 30, 2021
第5章 数字控制器的设计
17
2、Z变换的重要性质和定理
2)线性性质 由Z变换的定义可知,Z变换是线性变换。 当f1(t)的Z变换为 F1(z),f2(t)的Z变换为
f (kT )zk k 0
f*(t)的 Z变换
6
1、 z变换定义及表达式
在实际应用中,所遇到的采样信号的z变换
幂级数在收敛域内都对应有一个闭合形式,其表
达式是一个“z” 的有理式:
F(z)
K (zm zn
dm1z m1 ... d1z1 cn1z n1 ... c1z c0
《Windows Server 2003网络操作系统》第1章:Windows Server 2003系统概述
1.2.4 Windows Server 2003 Web版
Windows Server 2003 Web Edition 是 Microsoft Windows Server 2003 家族的一部 分,是专为web服务器设计的,它提供了 windows服务器操作系统的下一代Web结构的功 能,并且充分利用了Internet Information Services6.0、Microsoft 以及 Microsoft NET框架的改进功能。这是一个易 于部署、便于管理的服务器操作系统,它已被 优化为完整的 Web 宿主包。
7.Windows XP
2001年10月25日,Windows家族中极具开创性 的版本Windows XP(Experience)面世。 Windows XP具有全新的户用图形界面,整合更 多更实用的功能:防火墙,即时通讯,媒体播 放器。加强了用户体验,促进了多媒体技术及 数码设备的发展。增强的即插即用的特性使许 多硬件设备更易于再Windows XP上进行使用。 Windows XP具有全面为中国用户开发的中文技 术及特性,全面满足中国用户在数字时代的需 求。
4.Windows NT
Windows NT是微软公司推出的面向工作站、网络服务 器和大型计算机的多任务、多用户操作系统,其“NT” 代表“new technology(新技术)”。它主要面向商 业用户,有服务器版和工作站版之分,即分为NT Workstation和NT Server两种产品。 Workstation版本是直接面向用户的,它比Win95的效 率更高,而且更少出错。Server用于服务器端,它对 局域网(LAN)的计算机提供各种系统服务和安全保障。 Server上如果加上IIS就可以提供Web服务。Windows NT凭借其良好的兼容性及与Windows操作系统类似的良 好的图形界面,在网络操作系统市场上已经牢牢地站 稳了脚跟。广大用户曾经使用最多的Windows NT网络 操作系统版本为4.0,它于1996年8月推出。对微软来 说,NT是一个非常重要的十字交叉点,这一产品使微 软成功地从台式机领域扩张到了服务器领域。
Win-2003安装、迁移域控制器

将成员服务器升为域控制器--1(安装第一台域控制器)目前很多公司的网络中的PC数量均超过10台:按照微软的说法,一般网络中的PC数目低于10台,则建议建议采对等网的工作模式,而如果超过10台,则建议采用域的管理模式,因为域可以提供一种集中式的管理,这相比于对等网的分散管理有非常多的好处,那么如何把一台成员服务器提升为域控?我们现在就动手实践一下:本篇文章中所有的成员服务器均采用微软的WindowsServer2003,客户端则采用WindowsXP。
首先,当然是在成员服务器上安装上WindowsServer2003,安装成功后进入系统,我们要做的第一件事就是给这台成员服务器指定一个固定的IP,在这里指定情况如下:机器名:ServerIP:192.168.5.1子网掩码:255.255.255.0DNS:192.168.5.1(因为我要把这台机器配置成DNS服务器)由于WindowsServer2003在默认的安装过程中DNS是不被安装的,所以我们需要手动去添加,添加方法如下:“开始—设置—控制面板—添加删除程序”,然后再点击“添加/删除Windows组件”,则可以看到如下画面:向下搬运右边的滚动条,找到“网络服务”,选中:默认情况下所有的网络服务都会被添加,可以点击下面的“详细信息”进行自定义安装,由于在这里只需要DNS,所以把其它的全都去掉了,以后需要的时候再安装:然后就是点“确定”,一直点“下一步”就可以完成整个DNS的安装。
在整个安装过程中请保证WindowsServer2003安装光盘位于光驱中,否则会出现找不到文件的提示,那就需要手动定位了。
安装完DNS以后,就可以进行提升操作了,先点击“开始—运行”,输入“Dcpromo”,然后回车就可以看到“ActiveDirectory安装向导”在这里直接点击“下一步”:这里是一个兼容性的要求,Windows95及NT4SP3以前的版本无法登陆运行到WindowsServer2003的域控制器,我建议大家尽量采用Windows2000及以上的操作系统来做为客户端。
第三讲 [兼容模式]
![第三讲 [兼容模式]](https://img.taocdn.com/s3/m/2fc1ba01866fb84ae45c8dcf.png)
2、系统的状态与涨落 ①动力学状态. 动力学系统的状态是描述系 统所必需的最小一组变量,只要知道了在 t t0 时 的这组变量和 t t0 时的输入,那么就能完全确定 系统在任何 t t0 时间的行为。这组变量叫做状态 变量。
②热力学状态.
对
于热力学系统,由于大量 分子的持续无规则运动, 其力学状态无穷多,但可 以采用宏观平均统计量来 描述热力学系统。如描述 一定容积气体的状态,用 压力p和温度T这两个热力 学状态变量就可以了。
当系统处于定态时 即
dQi 0 dt
f1 f 2 f n 0
* * Q1* , Q2 ,Qn
从而可能出定态解: 这些定态解有些是稳定的,有些可能是不稳 定的。
一般系统的性质:整体性、同形性、目的性、层次 性和动态性
①系统的整体性:系统不是各孤立部分属性 的简单叠加,它还具有各孤立部分所没有 的新的性质和行为。 从系统中各部分间的关系考察,系统类型: • 累加型 • 逐步分离 • 逐步集中
5、一般系统论 采用微分方程组来描述系统: 设 Qi 是元素 pi (i 1,2, n) 的某个测度, 对于有限数量的元素,其测度有如下形式:
dQ1 dt f1 (Q1 , Q2 ,, Qn ) dQ 2 f 2 (Q1 , Q2 ,, Qn ) dt dQn f n (Q1 , Q2 ,, Qn ) dt
☆布鲁塞尔模型(或三分子模型),该模型 能模拟广泛的宏观自组织行为,给出对应 于各种类型耗散结构的解,在非平衡线相 变研究中得到广泛的应用,它使我们能够 更好的理解出现极限环、非均匀定态、空 间化学波等现象的条件。 其方程为: k1 A x k2 y D B x k3 3 x 2x y k4 x E
计算机控制系统总结

什么是采样定理?其物理意义是什么
如果一个连续信号不包含高于频率 的频率分量,连续信号中所包含频率分量的最高频率为 ,那么就完全可以用周期T< 的均匀采样值来描述,或者说,如果采样频率 2 ,那么就可以从采样信号中不失真地恢复原连续信号。
如果选用的采样频率 ,对连续信号中所包含的最高频率的正玄分量来讲,能够做到在一个振荡周期内采样两次以上,那么经采样所得的脉冲序列,就包含了连续信号的全部信息,如采样次数太少,采样所得的脉冲序列就不能无失真地反映连续信号的特性。
8执行器分为哪些类,电动执行器的输入信号范围是多大?
执行器分为电动执行器、气动执行器和液动执行器。
电动执行器的输入信号范围是:连续信号为0-10mA或4-20mA
9传感器分为哪些类?
温度传感器、压力传感器、流量传感器、液面传感器、力传感器
10简述数字调节器及输入输出通道的结构和信息传递过程,并画出示意图?
前置滤波器的主要作用是什么?
前置滤波器是串在采样开关前的模拟低通滤波器,主要作用是防止采样信号产生频谱混叠,因此又称为抗混叠滤波器。
什么是信号恢复?信号恢复的过程是怎么的?
指将采样信号还原成连续信号的问题.
信号恢复的过程,从时域来说,就是要由离散的采样值求出所对应的连续时间函数,从频率上说,就是要出去采样信号频谱的旁带,保留基频分量。
数字调节器以数字计算机为核心,控制规律由编制的计算机程序实现。输入通道包括多路开关、模-数转换器、采样保持器,输出通道包括模-数转换器、保持器。
传递过程:连续信号由多路开关采样保持器将模拟信号转为离散信号,离散信号由模-数转换器转变为数字信号,数字信号由数字调节器进行调节,调节的数字信号由数-模转换器变为离散模拟信号,离散模拟信号由保持其转换为模拟信号。
计算机控制系统(第2版)何克忠第一章

计算机控制系统(第2版)何克忠第一章第1章计算机控制概论1.1典型的计算机控制系统图1.1制冷过程计算机控制系统计算机控制系统(第2版)图1.21五机架冷连轧机控制系统1.2五机架冷连轧机控制系统1. 过程监控级2. 操作监控级3. 设备监控级计算机控制系统(第2版)图1.3带钢热连轧机集散型控制系统图1.4加速器计算机控制系统的分布及其功能图1.5加速器的计算机控制网络计算机控制系统(第2版)图1.6卫星计算机的过程接口原理图1.2计算机控制系统的分类1. 计算机控制系统按照功能的分类图1.7计算机数据处理系统计算机控制系统(第2版)图1.8直接数字控制系统图1.9监督控制系统计算机控制系统(第2版)图1.10分级控制系统图1.11集散型控制系统图1.12计算机控制网络2. 计算机控制系统按照控制规律的分类3. 计算机控制系统按照控制方式可分为开环控制和闭环控制计算机控制系统(第2版)1.3计算机控制系统的结构和组成图1.13飞机单轴自动驾驶连续控制系统图1.14飞机单轴自动驾驶计算机控制系统图1.15飞机单轴自动驾驶不同采样周期的计算机控制系统图1.16轧钢机计算机控制系统示意图计算机控制系统(第2版)图1.17轧钢机计算机厚度控制系统方框图图1.18发电机计算机控制系统方框图图1.19玻璃熔窑计算机温度控制系统图1.20典型的连续控制系统的结构图1.21输出反馈计算机控制系统图1.22状态反馈计算机控制系统计算机控制系统(第2版) 1.3.1控制对象图1.23对象的控制通道和扰动通道图1.24控制对象的输入与输出1.3.2执行器计算机控制系统(第2版)图1.25调节阀的输入输出特性1.3.3测量环节计算机控制系统(第2版)计算机控制系统(第2版)1.3.4数字调节器及输入、输出通道图1.26数字调节器的结构及信息的交换和传递1. 多路开关、采样保持器2. 采样定理图1.27信号y(t)的频谱特性图1.28离散信号y*(t)的频谱特性3. 模数转换器4. 数字计算机计算机控制系统(第2版)图1.29控制用计算机系统5. 数模转换器6. 保持器计算机控制系统(第2版)图1.30零阶保持器的冲激响应图1.31零阶保持器的幅频特性和相频特性图1.32RC保持器电路图图1.33一阶保持器的冲激响应计算机控制系统(第2版)图1.34数字调节器的示意图1.4计算机控制系统的性能及其指标1.4.1计算机控制系统的稳定性图1.35过渡过程曲线1. 发散振荡2. 等幅振荡3. 衰减振荡4. 非周期衰减计算机控制系统(第2版) 1.4.2计算机控制系统的能控性和能观测性1.4.3动态指标图1.36系统过渡过程特性2. 调节时间ts3. 峰值时间tp4. 衰减比η5. 振荡次数N图1.37闭环系统的频域指标1.4.4稳态指标1.4.5综合指标1. 积分型指标2. 末值型指标3. 复合型指标计算机控制系统(第2版) 1.5对象特性对控制性能的影响图1.38对象特性对反馈控制系统1.5.1对象放大系数对控制性能的影响1.5.2对象的惯性时间常数对控制性能的影响1.5.3对象的纯滞后时间对控制性能的影响图1.39τn对输出量yn(t)的影响1.6计算机控制研究的课题1. 数学描述和分析方法2. 离散系统的性能分析3. 计算机控制系统的设计4. 控制系统的计算机辅助计算和设计计算机控制系统(第2版) 1.7计算机控制的发展方向1. 最优控制2. 自适应、自学习和自组织系统3. 系统辨识4. 分级控制5. 集散型控制1.8计算机控制的发展前景1.9练习题。
计算机控制系统分类

计算机控制系统分类计算机控制系统的分类有三种方法:以自动控制行式分类,以参于控制方式分类或以调节规律分类。
一、以自动控制行式分类以自动控制方式可以分成如下几类:(一) 计算机开环控制(Computer Open Loop Control)系统若计算机开环控制系统的输出对生产过程能行使控制,但控制结果---生产过程的状态没有影响计算机控制的系统,计算机\控制器\生产过程等环节没有构成闭合环路,则称之为计算机开环控制系统.从图上看出生产过程的状态没有反馈给计算机,而是由操作人员监视生产过程的状态,决定控制方案,并告诉控制计算机使其行使控制作用.(二) 计算机闭环控制计算机对生产对象或过程进行控制时,生产过程状态能直接影响计算机控制的系统,称之为计算机闭环控制系统.控制计算机在操作人员监视下,自动接受生产过程状态检测结果,计算并确定控制方案,直接指挥控制部件(器)的动作,行使控制生产过程作用.在这样的系统中,控制部件按控制机发来的控制信息对运行设备进行控制,另一方面运行设备的运行状态作为输出,由检测部件测出后,作为输入反馈给控制计算机;从而使控制计算机\控制部件\生产过程\检测部件构成一个闭环回路.我们将这种控制形式称之为控制计算机闭环控制.计算机闭环控制系统,利用数学模型设置生产过程最佳值与检测结果反馈值之间的偏差,控制达到生产过程运行在最佳状态.(三) 在线控制只要计算机对受控对象或受控生产过程,能够行使直接控制,不需要人工干预的都称之为控制计算机在线控制或称联机控制系统.(四) 离线控制控制计算机没有直接参于控制对象或受控生产过程.它只完成受控对象或受控过程的状态检测,并对检测的数据进行处理;而后制定出控制方案,输出控制指示,操作人员参考控制指示,人工手动操作使控制部件对受控对象或受控过程进行控制.这种控制形式称之为计算机离线控制系统.(五) 实时控制系统控制计算机实时控制系统是指受控制的对象或受控过程,每当请求处理或请求控制时,控制机能及时处理并进行控制的系统,常用在生产过程是间断进行的场合.如炼钢,每炼一炉钢是一个过程;又如轧钢过程,每轧出一块钢算一个过程,每个过程都重复进行.只有进入过程才要求计算机进行控制.在计算机一旦进行控制时,就要求计算机对来自生产过程的信息在规定的时间内作出反应或控制.这种系统常使用完善的中断系统和中断处理程序来实现.综上所述,一个在线系统并不一定是实时系统.但是一个实时系统必是一个在线系统.二、以参于控制方式来分类按控制机参于控制方式来分类,可分成如下几种:(一)直接数字控制系统由控制计算机取代常规的模拟调节仪表而直接对生产过程进行控制,由于计算机发出的信号为数字量,故得名DDC控制。
Windows Server 2003 网络配置

Windows Server 2003 网络配置1.网络模型:OSI参考模型:TCP/IP参考模型:2、网络的分类:3、IP/IP寻址4、VLSM/CIDR:具体笔记:一、IP的地址的长度:32位二进制---IPv4协议标准分类方法:点分十进制法128位二进制---IPv6协议标准分类方法:点分十六进制法二、IP---网际协议(互联网协议)1、定义了数据传送的基本单元—IP数据报2、完成路由选择功能,为数据选择传送的路径3、定义了分组的传送规则三、IP服务:1、不可靠的数据投递服务2、面向无连接的传输服务3、尽最大努力投递服务:TTL四、IP地址:IP V4协议地址:32位的二进制采用点分十进制法划分为4段W.X.Y.Z五、IP地址的结构:W.X.Y.Z网络地址:表示所在网络ID主机地址:表示所在主机ID六、IP地址的分类:W.X.Y.ZA类地址:8位的网络ID +24位的主机ID网络段范围:0 0000000---0 11111110---127====实际可用127个网络主机号范围:2^24-2=16777214比较适合用在大型网络中B类地址:16位的网络ID +16位的主机ID网络段范围:10 00000.00000000---10 11111.11111111128.0---191.255===实际可用16384个网络主机号范围:2^16-2=65534比较适合用在中型网络中C类地址:24位的网络ID +8位的主机ID网络段范围:110 00000.00000000.00000000-110 11111.11111111.11111111 192.0.0---223.255.255==实际可用2097152个网络主机号范围:2^8-2=254比较适合用在小型网络中D类地址:前八位ID范围--------组播地址1110 0000---1110 1111224--239E类地址:前八位ID范围--------科学试验11110 000---11110 111240--247七、二进制----->十进制转换----->十六进制转化0 0 01 1 110 2 211 3 3100 4 4101 5 5110 6 6111 7 71000 8 81001 9 91010 10 A1011 11 B1100 12 C1101 13 D1110 14 E1111 15 F二进制计算法则:8421码例如:十进制365=3×10^2 +6×10^1 +5×10^0=3×100 +6×10 +5×1=300 +60 +5=365二进制1111=1×2^3 +1×2^2 +1×2^1 +1×2^0 =1×8 +1×4 +1×2 +1×1=8 +4 +2 +1=15练习1:二进制到十进制的转换练习10101111=128+32+8+4+2+1=17511001100=128+64+8+4=20410101010=128+32+8+2=17010001000=128+8=13611111111=128+64+32+16+8+4+2+1=25511111111+1=100000000=25610111111=11111111-64=255-64=19111001111=11111111-32-16=255-48=207练习2:十进制到二进制的转换练习69=1000101256=100000000168=101010001428=10110010100练习3:二进制到十六进制转换练习10 1010 1111 1010 1011 1001=2AFAB911 1011 1010 1101 1101 1001=3BACC911 0101 1101 0000 1001 0010=35D09211 0101 0111 1001 0101 0101=357955练习4:十六进制到二进制转换练习3EB1=111110101100012FA4=10111110100100F1BC=11110001101111003FEE=11111111101110八、特殊的IP地址:1、本机地址/无地址:无效地址0.0.0.02、APIPA:自动私有IP地址169.254.X.X3、回环地址:回送地址127.X.X.X4、网络地址:有效的网络ID +全0的主机ID例如:192.168.10.8的网络地址192.168.10.0148.45.23.9的网络地址148.45.0.016.23.5.8的网络地址16.0.0.05、主机地址:有效的主机ID +全0的网络ID例如:192.168.10.8的主机地址0.0.0.8148.45.23.9的主机地址0.0.23.916.23.5.8的主机地址0.23.5.86、私有地址:局域网地址(免费)A类:10.X.X.XB类:172.16.X.X-----172.31.X.XC类:192.168.0.X----192.168.255.X7、广播地址:(1)直接广播地址:有效的网络ID +全1的主机ID例如:192.168.10.8的广播地址192.168.10.255148.45.23.9的广播地址148.45.255.25516.23.5.8的广播地址16.255.255.255(2)有限广播地址:255.255.255.255九、子网掩码:又称为子网屏蔽码--32位二进制,点分十进制划分在子网掩码中:1 表示网络ID0 表示主机ID注意:子网掩码是由连续的1 +连续的0 组成例如:A类地址:8位的网络+24位的主机默认子网掩码:11111111.00000000.00000000.00000000十进制表示:255.0.0.0B类地址:16位的网络+16位的主机默认子网掩码:11111111.11111111.00000000.00000000十进制表示:255.255.0.0C类地址:24位的网络+8位的主机默认子网掩码:11111111.11111111.11111111.00000000十进制表示:255.255.255.0十、判断若干台计算机是否在一个网络里:例1:192.168.10.8 子网掩码:255.255.255.0192.168.10.60 子网掩码:255.255.255.0方法:IP地址“与”子网掩码1 与0 得00 与0 得00 与1 得01 与1 得1总结:任何数与0 都得0任何数与1 都得自身判断:192.168.10.8=192.168.10.00001000255.255.255.0=11111111.11111111.11111111.00000000与完结果=192.168.10.0--->子网地址192.168.10.60=192.168.10.00111100255.255.255.0=11111111.11111111.11111111.00000000与完结果=192.168.10.0--->子网地址子网地址相同,得出两个IP在同一个网络里。
(精华版)国家开放大学电大专科《微机系统与维护》单选题判断题题库及答案

(精华版)国家开放大学电大专科《微机系统与维护》单选题判断题题库及答案(精华版)国家开放大学电大专科《微机系统与维护》单选题判断题题库及答案盗传必究一、单选题题目1 以下选项中,()不是微机的输入或输出设备。
选择一项:正确答案:CPU 题目2 以下选项中,()属于应用软件。
选择一项:正确答案:Office 2003 题目3 CPU的主要功能是对微机各部件进行统一协调和控制,它包括运算器和()。
选择一项:正确答案:控制器题目4 1981年IBM推出首款个人电脑开创了全新的计算机时代,该电脑选用的芯片是()。
选择一项:正确答案:Intel 8088 题目5 以下选项中,()是Intel公司推出的80x86系列中的第一个32位微处理器芯片。
选择一项:正确答案:Intel 80386 题目6()是用于微机与电话线路之间进行数字、模拟信号转换的装置。
选择一项:正确答案:调制解调器题目7 用于整理小块内存映射到虚拟内存以释放物理内存的优化大师组件是()。
选择一项:正确答案:内存整理题目8 在运行窗口中输入()命令可以打开注册表编辑器。
选择一项:正确答案:regedit 题目9 出现在注册表右边窗口中的数据字符串称为()。
选择一项:正确答案:项值题目10 备份文件的扩展名通常为()。
选择一项:正确答案:.bak 题目11 磁盘清理程序不能清理()的内容。
选择一项:正确答案:“我的文档”中的文件题目12 微机中寿命最长的部件一般是()。
选择一项:正确答案:显示器题目13 键盘内有一个微处理器,负责控制整个键盘的工作,如()、键盘扫描码的缓冲以及和主机的通信等。
选择一项:正确答案:键盘自检题目14 以下选项中,()不是CPU的接口类型。
选择一项:正确答案:接点式题目15 以下选项中,()不是总线的主要性能指标。
选择一项:正确答案:总线长度题目16 运算器的基本功能是()。
选择一项:正确答案:进行算术运算和逻辑运算题目17 为解决CPU和内存之间的速度匹配问题,通常采用的办法是在CPU和内存之间增设一个()。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
离散系统的稳定判据
Eliahu Ibraham Jury (1923-) American engineer, born in Baghdad, Iraq. He received his Doctor of Engineering Science degree from Columbia University of New York in 1953. He was professor of Electrical Engineering at the University of California, Berkeley, and the University of Miami.
【连续系统】 连续系统稳定与否取决于闭环系统特征根在 s 平面 上的位置。若特征根全在s左半平面,则系统稳定,只 要有一个根在s平面的右半平面或虚轴上,则系统不稳 定。 【离散系统】 根据s平面和z平面的映射关系,离散系统稳定的充 要条件是所有特征根全部位于z平面单位圆内,只要有 一个根在单位圆外,系统就不稳定;若系统的根位于 单位圆上,系统处于稳定边界,亦称为系统不稳定。
4. s平面上平行线与z平面映射关系
S平面与Z平面的相互关系
表1-4 平行线的映射
图1-3 实轴平行线的映射
图1-4 虚轴平行线的映射
S平面与Z平面的相互关系
5. s左半平面主带在z平面映射
S平面与Z平面的相互关系
6. s右半平面主带在z平面映射
图1-5 s平面主带左半平面的映射
图1-6 s平面主带右半平面的映射
离散系统的稳定判据
Define
离散系统的稳定判据
p0 Q z pn
P , s p0 p1 s pn s n
P z P z
If P(z) is Schur, while R(z) is not, then there must exist a λ in [0,1], such that P λ(z) has a root on the unit circle at the point
P , s p0 p1 s pn s n
离散系统的稳定判据
The coefficient of the root number consists of an open set Rouché Theorem: Let f(z) and g(z) be two functions that are analytic inside and on a simple closed contour C. if |g(z)|<|f(z)| for all z on C, f(z) and f(z)+g(z) have the same number of zeros (multiplicities included) inside C
4
离散系统的稳定判据
Apparently,
离散系统的稳定判据
Define
p 1 R z P z 0 Q z pn z n 1 pn p0
P z P z
p0 Q z pn
always of degree If P(z) satisfies
P z p0 p1 z pn z n
be a polynomial of degree n. We have the following necessary condition. If P(z) is Schur, then
pn p0
Define
1 Q z z n P p0 z n p1 z n 1 pn z p 1 R z P z 0 Q z z p n
that is R(z) Schur
We have the following equivalence: P(z) Schur
P z0 P z0
* z0 e j
p0 n 1 z0 P 0 pn z0
P(z) Schur
zR(z) Schur
(1-1)
若系统的输入为脉冲函数,R(z)=1,则系统输出为
b z m b z m 1 bm 1 z bm C z 0 n 1 n 1 a0 z a1 z an 1 z an
b z
i 0 n i i 0 i
m
m i
a z
n i
?
S平面与Z平面的相互关系
z esT
s j
S平面
?
映射
Z平面
S平面与Z平面的相互关系
z e( j)T eT e jT eT T
R z eT z T
复变量z的模R及相角θ 与复变量s的实部和虚 部的关系为: 1. s平面与z平面整体映射关系
s0 s2
c0 c2
系统不稳定!
z1,2 -0.735699 0.685928 i
单位圆外的解为:
离散系统的稳定判据
Jury判据怎么来的?
?
Schur Property: A polynomial is said to be Schur, if it has all its roots inside the unit circle. Now, let
D( z ) 3 z 4 z 3 z 2 2 z 1
利用Jury稳定性判据判断系统的稳定性 解:构造Jury阵列
z0 1 3 -8 7 15 19 z1 -2 1 -5 2 26 26 z2 -1 -1 2 -5 19 15 z3 1 -2 7 -8 z4 3 1
a0 a4 b0 b3
离散系统的稳定判据
Eliahu I. Jury (1923-)
Academician who initiated the field of discrete-time systems, pioneered the z-transforms and created the ‘Jury stability test’. “lifetime graduate student.” “this is indeed how I consider myself, for otherwise, my professional career will be obsolete and probably very limited.”
Look the three equations again
1 1 p 1 P P 0 P z0 0 pn z 0 z0 z0
Then
P z p0 p1 z pn z n Q z p0 z n p1 z n 1 pn
pi 1, i 1, 2, , n
反变换后
k k C k A1 p1k A2 p2 An pn Ai pik i 1
(1-4)
重根呢?是否还成立? 为了求解系统的稳定性,就需要求出它的全部特征根? 和连续系统一样,判断离散系统稳定性并不必求出特征根 的具体数据,而只要了解特征根的位置就可以了? 连续系统是利用特征方程的系数来判定特征根实部的符号, 而在离散系统中,则应利用特征方程的系数来判定特征根 的模的大小。
z0 e j , 0, 2
that is
P z0 P z0
p0 n 1 z0 P 0 pn z0
Since P λ(z) is a real polynomial, the inverse of z0 is also a root
2. 角频率ω与z平面相角关系
表1-2 角频率ω与z平面相角关系
表1-1 S平面与Z平面关系
1
S平面与Z平面的相互关系
3. s平面上的主带与旁带在z平面映射关系
表1-3 主带与旁带映射到z平面
S平面与Z平面的相互关系
3. s平面上的主带与旁带在z平面映射关系
图1-1 主带映射
图1-2 旁带映射
S平面与Z平面的相互关系
3
离散系统的稳定判据
1. 朱里(Jury)稳定判据 设离散控制系统特征方程为
D( z ) an z n an 1 z n 1 a1 z a0 0
离散系统的稳定判据
表1-6 朱里阵列格式
其中a0,a1,…,an为实数。首先按多项式系数构造朱里阵列表 (见表1-6)
离散系统的稳定判据
Since P λ(z) is a real polynomial, the inverse of z0 is also a root
1 z0
离散系统的稳定判据
We have
离散系统的稳定判据
p0 n 1 z0 P 0 pn z0
n
P z0 P z0
Since
p P z0 0 P z0 0 pn2 p0 1 pn
P z0 0
P(z) is NOT Schur
2
zR z P z
p0 Q z pn
We have
Jury Criteria
If P(z) is Schur, while R(z) is not, then there must exist a λ in [0,1], such that P λ(z) has a root on the unit circle at the point
z0 e j , 0, 2
根据系统稳定性定义,如果系统对脉冲函数的响应C(k), 在k 趋于无穷时衰减为零,即 n (1-5) lim C k lim Ai pik 0