《系统建模与仿真》实验手册
系统建模与仿真实验报告
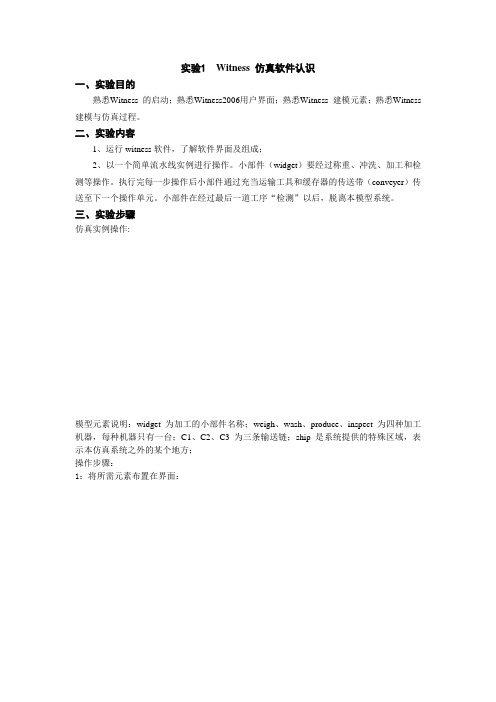
实验1 Witness仿真软件认识一、实验目的熟悉Witness 的启动;熟悉Witness2006用户界面;熟悉Witness 建模元素;熟悉Witness 建模与仿真过程。
二、实验内容1、运行witness软件,了解软件界面及组成;2、以一个简单流水线实例进行操作。
小部件(widget)要经过称重、冲洗、加工和检测等操作。
执行完每一步操作后小部件通过充当运输工具和缓存器的传送带(conveyer)传送至下一个操作单元。
小部件在经过最后一道工序“检测”以后,脱离本模型系统。
三、实验步骤仿真实例操作:模型元素说明:widget 为加工的小部件名称;weigh、wash、produce、inspect 为四种加工机器,每种机器只有一台;C1、C2、C3 为三条输送链;ship 是系统提供的特殊区域,表示本仿真系统之外的某个地方;操作步骤:1:将所需元素布置在界面:2:更改各元素名称:如;3:编辑各个元素的输入输出规则:4: 运行一周(5 天*8 小时*60 分钟=2400 分钟),得到统计结果。
5:仿真结果及分析:Widget:各机器工作状态统计表:分析:第一台机器效率最高位100%,第二台机器效率次之为79%,第三台和第四台机器效率低下,且空闲时间较多,可考虑加快传送带C2、C3的传送速度以及提高第二台机器的工作效率,以此来提高第三台和第四台机器的工作效率。
6:实验小结:通过本次实验,我对Witness的操作界面及基本操作有了一个初步的掌握,同学会了对于一个简单的流水线生产线进行建模仿真,总体而言,实验非常成功。
实验2 单品种流水线生产计划设计一、实验目的1.理解系统元素route的用法。
2.了解优化器optimization的用法。
3.了解单品种流水线生产计划的设计。
4.找出高生产效率、低临时库存的方案。
二、实验内容某一个车间有5台不同机器,加工一种产品。
该种产品都要求完成7道工序,而每道工序必须在指定的机器上按照事先规定好的工艺顺序进行。
系统建模与仿真实验指导书(2)
实验一例1-3、设置传递函数22)13()5(6)(+++=s s s s G ,时间延迟常数4=τ 方式1:set(G,'ioDelay',4) %为系统的ioDelay 属性设定值G %显示传递函数解:该传递函数模型可以通过下面的语句输入到MATLAB 工作空间为: >> num=6*[1,5];den=conv([1,3,1],[1,3,1]); G=tf(num,den); set(G,'ioDelay',4) G例1-4、已知传递函数22)13()5(6)(+++=s s s s G,提取系统的分子和分母多项式(实验) 解:提取系统的分子和分母多项式程序为: >> num=6*[1,5];den=conv([1,3,1],[1,3,1]); G=tf(num,den)[num den]=tfdata(G,'v')例1-5 某系统的零极点模型)22)(22)(2)(1()5(6)(2j s j s s s s s G -++++++= >> s=zpk('s')G=6*(s+5)^2/((s+1)*(s+2)*(s+2+2)*(s+2-2))例1-7已知系统传递函数)2)(36(114222s s s s s s G +++++=,求零极点及增益,并绘制系统零极点分布图。
(实验)(1)零极点及增益: 〉〉num=[1,4,11]; den=conv([1,6,3],[1,2,0]);G=tf(num,den) [z,p,k]=zpkdata(G,'V')(2)系统零极点分布图:(3)〉〉num=[1,4,11];den=conv([1,6,3],[1,2,0]); G=tf(num,den) pzmap(G)例1-11 给定零极点模型: )5.1)(23())7)(2(8.6)(+±+++=s j s s s s s G用MATLAB 命令得出其等效的零极点传递函数模型。
《机电系统建模与仿真》实验指导书(研究生)
《机电系统建模与仿真》实验指导书王红茹编写适用专业:机械工程________________________科技大学机械工程学院2015 年 11 月实验一:多闭环直流伺服系统仿真分析实验学时: 2实验类型:综合实验要求:必修一、实验目的1.掌握运用 MATLAB/Simulink 进行多闭环伺服控制系统仿真分析的方法。
二、实验容及原理主要针对工程领域常用的自动控制系统--双闭环控制系统进行建模与仿真实验,并对其原理进行详细介绍。
采用 PI 控制器的转速负反馈单闭环调速系统能在系统稳定的前提下实现转速无静差,但不能满足调速系统对动态性能要求较高时的场合,且对扰动的抑制能力也较差。
双闭环调速系统是在单闭环调速的基础上,将转速和电流分开控制,分别设计转速、电流两个控制器,且转速控制器的输出作为电流控制器(环)的给定输入,从而形成转速、电流双闭环控制。
这种双闭环调速系统是直流调速的一种典型形式。
以双闭环 V-M调速系统为例,介绍运用 MATLAB/Simulink 进行双闭环控制系统动态分析的方法。
双闭环V-M 调速系统的结构如图 1.1 所示。
图中,直流电机参数: P nom10kW , U nom220V , I nom53.5A , n nom1500r / min ,电枢电阻R a0.31,系统主电路总电阻R 0.4,电枢回路电磁时间常数T a0.0128s ,机电时间常数 T m0.042s;三相桥平均失控时间T s0.00167 s ,触发器放大系数K s30 ;电流反馈系数 K i0.072V / A ,电流环滤波时间常数T oi0.002s ;转速反馈系数 K t0.0067V min/ r ,转速环滤波时间常数T on0.01s 。
.专业资料 ... .. ..电流环滤波电流反馈系数扰动信号1K iT oi s131 -I i+R11 +P i+4 T on s 1I n 1sK s1 / R aT m sC e给定P n++-电机 转速环sT oi s 1电流T s s T a s 1传动 电势 信号--1转速滤波平衡转速 电流环调节器装置系数可控硅电机-调节器 滤波平衡2整流器电枢1K tT on s 1转速环滤波转速反馈系数图 1.1 双闭环 V-M 调速系统的动态结构图①电流环、转速环选型原则。
系统建模与仿真实验报告
系统建模与仿真实验报告系统建模与仿真实验报告1. 引言系统建模与仿真是一种重要的工程方法,可以帮助工程师们更好地理解和预测系统的行为。
本实验旨在通过系统建模与仿真的方法,对某个实际系统进行分析和优化。
2. 实验背景本实验选择了一个电梯系统作为研究对象。
电梯系统是现代建筑中必不可少的设备,其运行效率和安全性对于整个建筑物的使用体验至关重要。
通过系统建模与仿真,我们可以探索电梯系统的运行规律,并提出优化方案。
3. 系统建模为了对电梯系统进行建模,我们首先需要确定系统的各个组成部分及其相互关系。
电梯系统通常由电梯、楼层按钮、控制器等组成。
我们可以将电梯系统抽象为一个状态机模型,其中电梯的状态包括运行、停止、开门、关门等,楼层按钮的状态则表示是否有人按下。
4. 仿真实验在建立了电梯系统的模型之后,我们可以通过仿真实验来模拟系统的运行过程。
通过设定不同的参数和初始条件,我们可以观察到系统在不同情况下的行为。
例如,我们可以模拟电梯在高峰期和低峰期的运行情况,并比较它们的效率差异。
5. 仿真结果分析通过对仿真实验结果的分析,我们可以得出一些有价值的结论。
例如,我们可以观察到电梯在高峰期的运行效率较低,这可能是由于大量乘客同时使用电梯导致的。
为了提高电梯系统的运行效率,我们可以考虑增加电梯的数量或者改变乘客的行为规则。
6. 优化方案基于对仿真结果的分析,我们可以提出一些优化方案来改进电梯系统的性能。
例如,我们可以建议在高峰期增加电梯的数量,以减少乘客等待时间。
另外,我们还可以建议在电梯内设置更多的信息显示,以便乘客更好地了解电梯的运行状态。
7. 结论通过本次实验,我们深入了解了系统建模与仿真的方法,并应用于电梯系统的分析和优化。
系统建模与仿真是一种非常有用的工程方法,可以帮助我们更好地理解和改进各种复杂系统。
在未来的工作中,我们可以进一步研究和优化电梯系统,并将系统建模与仿真应用于更多的实际问题中。
8. 致谢在本次实验中,我们受益于老师和同学们的帮助与支持,在此表示诚挚的感谢。
哈工大系统建模与仿真基础实验手册
《系统建模与仿真基础》实验手册目录实验一基于M 文件的建模与仿真 (1)一、实验目的 (1)二、实验原理 (1)三、实验内容 (4)四、实验步骤 (6)五、实验报告 (6)实验二基于Simulink 文件的建模与仿真 (7)一、实验目的 (7)二、实验原理 (7)三、实验内容 (8)四、实验步骤 (10)五、实验报告 (10)实验一基于M 文件的建模与仿真一、实验目的熟悉以下内容:1) 矩阵及其相关运算2) 控制语句及其应用3) 二维绘图函数及其应用4) 插值函数及其应用5) 数值积分程序及其应用6) 基于m 文件进行系统建模与仿真分析二、实验原理1、矩阵及其相关运算如果一个矩阵A 有n 行、m 列元素,则称A 矩阵为n ⨯ m 矩阵;若n = m ,则矩阵A 又称为方阵。
MATLAB 语言中定义了下面各种矩阵的基本代数运算:1) 矩阵转置A'2) 加减法运算假设在MATLAB 工作环境下有两个矩阵A 和B,则可以由C=A + B 和C=A - B 命令执行矩阵加减法。
若A 和B 矩阵的维数相同,它会自动地将A 和B 矩阵的相应元素相加减,从而得出正确的结果,并赋给C 变量。
若二者之一为标量,则应该将其遍加(减) 于另一个矩阵。
3) 矩阵乘法假设有两个矩阵A 和S,其中A 的列数与S 矩阵的行数相等,或其一为标量,则称B 矩阵是可乘的,或称A 和B 矩阵的维数是相容的。
MATLAB 语言中两个矩阵的乘法由C=A*B 直接求出,且这里并不需要指定A 和B 矩阵的维数。
如果A 和B 矩阵的维数相容,则可以准确无误地获得乘积矩阵C;如果二者的维数不相容,则将给出错误信息,通知用户两个矩阵是不可乘的。
4) 矩阵行列式det(A)5) 矩阵特征根eig(A)6) 矩阵的左除MATLAB 中用“\”运算符号表示两个矩阵的左除,A\B 为方程AX=B 的解X,若A 为非奇异方阵,则X =A-1B,如果A 矩阵不是方阵,也可以求出X =A\B,这时将使用最小二乘解法来求取AX=B 中的X 矩阵。
plant simulation系统仿真与建模手册

plant simulation系统仿真与建模手册一、引言随着科技的飞速发展,plant simulation(植物仿真)系统在我国的应用越来越广泛。
plant simulation系统是一种通过计算机模拟与建模技术,对植物生长、发育、生理生态等过程进行高效、精确研究的系统。
本文将简要介绍plant simulation系统在各个领域的应用,以期为相关领域的研究与发展提供参考。
二、plant simulation系统基础知识1.系统组成与功能plant simulation系统主要由以下几个部分组成:数据采集与处理、模型构建与参数化、仿真算法与求解、结果分析与可视化等。
系统功能主要包括:(1)根据实际观测数据,构建植物生长模型;(2)通过调整模型参数,模拟植物在不同环境条件下的生长状态;(3)分析植物生长过程的各种影响因素,为生产实践提供理论依据。
2.常用仿真与建模方法(1)离散事件仿真:适用于研究植物生长过程中的阶段性事件,如发芽、开花、结果等。
(2)连续系统仿真:适用于研究植物生长过程中的连续变化,如生长速率、养分吸收等。
(3)系统动力学建模:通过建立植物生长与环境的动态关系,分析植物生长过程中的非线性特征。
(4)人工智能建模:利用神经网络、支持向量机等方法,对植物生长进行预测与优化。
三、plant simulation系统应用案例1.制造业生产调度:通过plant simulation系统模拟生产线的工作流程,优化生产计划与资源分配。
2.供应链管理:模拟供应链各环节的运行状况,降低库存成本,提高整体运营效率。
3.交通流量优化:模拟城市交通网络,为交通管理部门提供优化方案。
4.能源系统规划:模拟能源供需关系,为能源政策制定提供决策依据。
5.医疗资源分配:模拟医院各部门的工作状态,优化医疗资源配置。
四、plant simulation系统建模与仿真流程1.确定目标与需求:明确plant simulation系统的应用目的,提出具体研究问题。
(完整版)系统建模与仿真实验报告
实验1 Witness仿真软件认识一、实验目的熟悉Witness 的启动;熟悉Witness2006用户界面;熟悉Witness 建模元素;熟悉Witness 建模与仿真过程。
二、实验内容1、运行witness软件,了解软件界面及组成;2、以一个简单流水线实例进行操作。
小部件(widget)要经过称重、冲洗、加工和检测等操作。
执行完每一步操作后小部件通过充当运输工具和缓存器的传送带(conveyer)传送至下一个操作单元。
小部件在经过最后一道工序“检测”以后,脱离本模型系统。
三、实验步骤仿真实例操作:模型元素说明:widget 为加工的小部件名称;weigh、wash、produce、inspect 为四种加工机器,每种机器只有一台;C1、C2、C3 为三条输送链;ship 是系统提供的特殊区域,表示本仿真系统之外的某个地方;操作步骤:1:将所需元素布置在界面:2:更改各元素名称:如;3:编辑各个元素的输入输出规则:4:运行一周(5 天*8 小时*60 分钟=2400 分钟),得到统计结果。
5:仿真结果及分析:Widget:各机器工作状态统计表:分析:第一台机器效率最高位100%,第二台机器效率次之为79%,第三台和第四台机器效率低下,且空闲时间较多,可考虑加快传送带C2、C3的传送速度以及提高第二台机器的工作效率,以此来提高第三台和第四台机器的工作效率。
6:实验小结:通过本次实验,我对Witness的操作界面及基本操作有了一个初步的掌握,同学会了对于一个简单的流水线生产线进行建模仿真,总体而言,实验非常成功。
实验2 单品种流水线生产计划设计一、实验目的1.理解系统元素route的用法。
2.了解优化器optimization的用法。
3.了解单品种流水线生产计划的设计。
4.找出高生产效率、低临时库存的方案。
二、实验内容某一个车间有5台不同机器,加工一种产品。
该种产品都要求完成7道工序,而每道工序必须在指定的机器上按照事先规定好的工艺顺序进行。
系统建模与仿真实验

系统仿真与建模分析实验实验一生态平衡建模实验系统描述:在一个封闭的海岛上,设有两个群体:1.狐狸(FOXES);2.啮齿动物(RODENTS)情况是:1)狐狸出生后,需要八个月成长为成年狐狸,幼年狐狸每只(每月)要吃10只啮齿动物,若没有吃的就饿死,幼年狐狸的出生率为4,成年狐狸死亡因素有两个,一是每只狐狸每月要吃60只啮齿动物,若没有吃的就要饿死,二是从仿真时间算起,十年之后,每月要被猎人打死4只。
2)啮齿动物RODY出生后,三个月即可长成为成年啮齿动物,啮齿动物的出生率为0.8,如果幼年啮齿动物的父母死亡,则以短缺扶养和保护而死亡。
成年啮齿动物每月的死亡率有两个原因决定:一个是被狐狸吃掉,一个原因是总数超过100000(十万)只,则以水草不足而饿死。
一、实验目的:通过此实验了解系统动力学的仿真方法,学会用所学的建模理论来对实际问题进行建模,并对实际问题进行分析。
对此生态平衡系统进行仿真实验,改变不同的控制参数,分析实验的结果,得出系统保持生态平衡的条件,为决策者决策提供理论分析基础。
二.实验原理系统动力学(System Dynamics)是美国麻省理工学院J.W 福雷斯特(JayW Forrester)教授创立的一门新兴学科。
它按照自身独特的方法论建立系统的动态模型,并借助于计算机进行仿真,以处理行为随时间变化的系统的问题。
系统动力学首先强调系统性的观点,以及联系、发展、运动的观点,是研究复杂系统,诸如:社会、经济、环境、人口、生态平衡、产业发展等的有效工具。
系统动力学的研究对象主要是社会经济系统。
社会经济系统的范围十分广泛,凡是涉及到人类的社会活动和经济活动的系统都属于社会系统。
诸如本文要研究的人口系统、资源系统、环境系统、经济系统、科技系统、能源系统,都属于社会经济系统。
系统动力学的基础是通过实验方法认识系统的行为,为管理决策者提供决策的依据。
系统动力学仿真的基本步骤是:(1)明确建模目的一般来说,系统动力学对社会系统进行仿真实验的主要目的是认识和预测系统的结构和设计最佳参数,为制定合理的政策提供依据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附录一
实验1 最小二乘法的实现
实验报告
哈尔滨工业大学
航天学院控制科学与工程系
专业:探测制导和控制技术
班级:10804201
姓名:王逸群
日期:2011 年 5 月22 日
1.实验题目:最小二乘法的实现
7.实验结果分析
运行上一步的M文件所得仿真结果:
程序运行到最后各参数的值:
经过递推最小二乘辨识所得各参数与实际系统各参数的实际值相比有少许偏差,其中a1和a2的值与真实值相同,b0、b1、b2与真实值相比有不同程度的偏差,可能是由于步数不足,从生成的表格来看b0、b1、b2的值还没有趋于稳定,适当增加步数可能使这些值更接近真实值。
附录二
实验2 龙格-库塔法的实现
实验报告
哈尔滨工业大学
航天学院控制科学与工程系
专业:探测制导和控制技术
班级:10804201
姓名:王逸群
日期:2011 年 5 月22 日
1.实验题目:龙格—库塔法的实现
运行上一步的M文件所得结果:
即X=【-1.8774,-0.1140】’。
8.结论
所得结果比较满意,不过编程过程中还是遇到了不少问题,尤其对矩阵维数有了比较深刻的认识,很多次都是由于维数不一致导致程序无法运行,以后编程时应特别注意。
附录三
实验3 随动控制系统仿真
实验报告
哈尔滨工业大学
航天学院控制科学与工程系
专业:探测制导和控制技术
班级:10804201
姓名:王逸群
日期:2011 年 5 月22 日
1.实验题目: 随动控制系统仿真
3.给定的被控对象 (1)对象的传递函数
给定被控对象的传递函数为02
()(8)(1)
s G s s s +=+-。
(2)执行机构的传递函数 执行机构的传递函数为112()G s s
=。
(3)参考输入信号
参考输入信号2,(05)0,(510)()2,
(1015)0,(1520)2,
(2025)
t t r t t t t ≤≤⎧⎪<≤⎪⎪
=<≤⎨⎪<≤⎪<≤⎪⎩;
4.设计控制律的传递函数
10
5.建立Simulink 仿真模块
6.实验结果及分析
由仿真结果看到输出信号对输入信号的跟踪还是比较完美的。
7.结论
进行本实验时我给自己定的性能指标为超调量小于20%,调整时间小于0.5秒(0.05∆=),由仿真结果看到实验基本成功,满足我给自己定的性能指标。