麦哲伦600手持GPS电子罗盘校准方法
GPS初始点校正的操作步骤
GPS点校正求转换参数的操作步骤
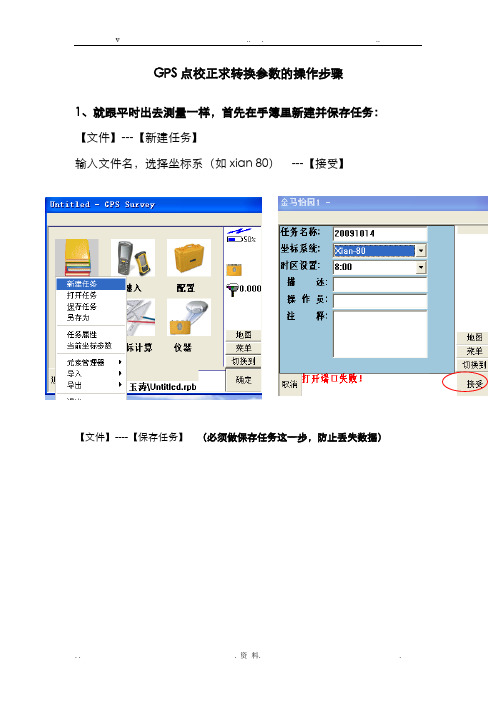
1、就跟平时出去测量一样,首先在手簿里新建并保存任务:【文件】---【新建任务】
输入文件名,选择坐标系(如xian 80)---【接受】
【文件】----【保存任务】(必须做保存任务这一步,防止丢失数据)
2、野外采集四个已知的控制点:【测量】---【测量点】
依次去测量这四个已知的控制点
3、输入四个已知控制点的坐标:
【键入】---【点】依次输入这四个已知控制点在当地坐标系下的坐标值,每输完一个点都要点击右下角的“保存”进行数据的保存。
4、进行点校正(求转换参数):
【测量】---【点校正】
点左下角的【增加】
点击【网格点名称】下的----选择键入的已知控制点坐标
点击【GPS点名称】下的----选择用GPS测得的相对应的控制点。
A251和D251对应为同一个点
(如上图所示,网格点和GPS点都必须是251这个点;不能网格点选251这个点,而GPS点却选252这个点。
)
选择好后点击【确定】,如下图所示:
再点【增加】直到四个已知控制点和对应测量点都添加进去,效果如下图:点击下面的【计算】----这里如果不点“计算”不生效
点击完“计算”后再点击【确定】,会出现下图的提示
这时再点【确定】即可。
(点校正求解转换参数的任务完成)。
麦哲伦海王星GPS手持机培训
技术参数 – 产品特性
• 接收机:SiRF Star III™ 20通道, WAAS/EGNOS/MSAS
ΔN=10 ΔE=20 注:实测坐标可以用海王 星手持机测得。
➢ 输入横轴墨卡托投影参 数
建立地方坐标系统 – 输入参数
➢ 在海王星手持机上,按“MENU” 键,选择“查看”→“设置” →“导航坐标系统”
➢ 导航坐标系统 坐标系统:用户格网-横向墨卡托 地图基准:CH_BJ54 北参考:真北
界面描述
道路罗盘屏幕: 方位 到下一点的距离 航向 预计到达时间
界面描述
高度计/气压计屏幕: (仅Triton 500E)
高度计
气压计
界面描述
卫星状态屏幕: (可自定义字段)
界面描述
• 按 “ PAGE / GO TO ”键可翻阅导航屏幕 • 按 “ ESC ”键可逆 • 长按“ PAGE / GO TO ”键可直接进入导航
• 电源: 2节AA电池(不包含) 工作时间 >10小时
数据存储容量
航点 航线 航迹
海王星数据存储容量
海王星300E 内存 1000
海王星400E
内存
SD卡
1000
1000х50
海王星500E
内存
SD卡
1000
1000х50
50条, 100个/条
20条, 3600个/条
50条, 100个/条
20条, 3600个/条
界面描述
麦哲伦手持gps常见问题
Posted 星期四, 10/20/2011 - 19:41Q1 谷歌地图使用。
A1 现阶段的新探险家数据为gpx格式;支持直接导入GoogleEarth中。
Q2 自定义文本问题。
A2 1.当直接批量导入的是地方坐标,而不是WGS84坐标;自定义文本格式应为:1,3391845.137,508588.452,2,3391835.656,508606.061,3,3391826.037,508623.596,以便批量导入。
Q3 为什么设置导航坐标系—主坐标系—原点坐标“东”改为E以后,设置好原点东后,E变为“西”,而且修改不过来?A3 恢复出厂设置可以解决。
Q4 加载详图为什么不能使用?(显示勾选不能使用)A4 使用的格式不对,应为imi格式;试着多操作几次看看。
Q5 在硬件中如何调用详图?A5 地图界面:菜单—地图—选择地图主菜单界面:工具—设置—地图—选择地图Q6 新探险家支持的详图格式有哪些?A6 只有IMI格式,对已栅格地图的支持,目前我还在测试,还不晓得如何才能让新探险家使用。
栅格地图的格式:RMP。
Q7 是否可以用户自行安装详图?A7 对于详图安装是开放的,只要用户有详图IMI格式,即可使用,但是我方不提供详图。
Q8 新探险家数据是否可以支持第三方软件,如:GOOGLE地球,CAD软件等?A8 可直接支持GOOGLE EARTH,对于CAD,ARCGIS,MAPINFO,EXCEL 等软件,可以通过MAPTRACK进行转换。
Q9 如何设置坐标参数?A9A:在硬件中的操作方法?另注:坐标系统设置详解新探险家系列提供了用户自定的坐标系参数设置和标准的北京54、西安80坐标系统,还有两套坐标系显示方案,用户可根据自己需求选用。
导航坐标系统菜单:主坐标系;主坐标系类型/主坐标分度带;主坐标精度;主地图基准;次坐标系;次坐标系类型;次坐标精度;次地图基准;北参考—真北,磁北;高度计源—GPS,高度计(仅610),地图主坐标系和次坐标系:主要用于投影设置,里面可以选择默认不投影(经纬度Lat/Lon),也可选择标准的坐标系统,如北京54,西安80,还可使用USER用户模式,默认WGS84经纬度模式:需要选择坐标系类型(度,度/分,度/分/秒)。
麦哲伦210 300 400 500 600 海王星GPS手持机操作说明

麦哲伦海王星GPS手持机操作说明麦哲伦海王星300E麦哲伦海王星400E麦哲伦海王星500E产品特性:易于使用 – 菜单简洁,界面直观,麦哲伦海王星让首次使用GPS手持机的用户,体验熟练用户能享受的全部功能。
航线和轨迹 – 创建单路线导航航线,一个多目的地航线或者仅使用返程功能,跟随您的足迹回到起点。
3米精度– SiRFstarIII GPS芯片和高灵敏度全向天线,提供卓越的GPS精度。
麦哲伦海王星能接收WAAS/EGNOS/MSAS信号,可利用广域差分系统提高精度。
3轴电子罗盘(仅限海王星500E)- 无论您身在何处,即使没有GPS定位,仍能得到精确的罗盘读数(GPS接收机电子罗盘对您是否移动,没有要求,均能正确定向)气压计(仅限海王星500E)- 灵敏的气压计读数能提供天气预报。
内置地图 – 内置中国基础地图,显示主要公路、城镇、水系和更多。
可加载详图 – 从SD卡可选择的海图、地形图、世界地图,安装到麦哲伦海王星,麦哲伦海王星300E是从内存加载地图。
SD卡扩展–(仅限海王星400E和500E)用可选的SD存储卡可加载详图或保存媒体。
产品描述:麦哲伦海王星A 背光按钮B 电源按钮C 缩小按钮D 放大按钮E 回车按钮 / 光标控制器F 翻页 / 导航按钮G 退出按钮H 菜单按钮I SD卡插槽(在保护橡胶盖下面)[ 仅限麦哲伦海王星400E & 500E ]技术参数物理性能包装高强度防抗冲击塑胶,防水等级IPX-7基础地图内置中国基础地图尺寸 4.65" x 2.16" x 1.22" (11.8 x 5.5 x 3.1 cm)盎司 (187 克) – 含电池重量 6.6屏,QVGA (240 x 320) 分辨率,LED背光灯(5.59cm)显示 2.2"数据存储内存或SD卡(可选配件)天线内置全向天线键盘9个直接访问键工作温度14°~ 140°F (-10° ~ 60°C)产品特性接收机SiRF Star III™ 20通道,WAAS/EGNOS时间热启动:20秒,冷启动:60秒,初始化:2分钟次/秒更新率 1航点内存可存1000个航点,SD卡可存1000×50个航点航线 100个航点/条,内存可存50条航线,SD卡可存50×50条航线航迹 3600个航点/条,内存可存20条航线,SD卡可存20×50条航线5米(10 ~16英尺)- WASS / EGNOS; <7米(15英尺)-~精度 3单点定位面积计算支持实时面积计算和事后面积计算语言英语、法语、德语、荷兰语、瑞典语、西班牙语、意大利语、葡萄牙语、芬兰语、挪威语、中文坐标系统纬度/经度、北京54、西安80、UTM、英国、爱尔兰、瑞士、瑞典、荷兰、德国、法国、USNG、MGRS、印度、荷兰、用户格网及其它电源类型2节AA电池(不包含)电池寿命大于10小时界面描述:移动指针在地图界面上有两个重要的指针。
如何准确校正手持式GPS导航仪
- 44
- 15
41. 989 15. 443 42. 032 15. 457
- 43
- 14
———
———
———
———
- 44
- 14
表 3 校正 GPS 后图标点坐标与对应实测点 GPS 显示值的对照表
图标点坐标值
GPS 显示坐标值
纬向误差
纬度
经度
纬度
经度
( m)
经向误差 ( m)
41. 902
42. 033
16. 313
- 1. 8
0. 0
41. 010
15. 509
42. 010
15. 510
0. 0
42. 043
15. 509
42. 040
15. 511
4. 2
- 1. 5 - 3. 0
42. 075
15. 509
42. 075
15. 510
0. 0
- 1. 5
42. 018
15. 509
摘 要 : 在野外地质测量中使用手持式 GPS 应该达到一定的精度要求 。要提高 GPS 的定位精度 , 只需在工作区内均匀选择 5~10 个控制点进行校正 。求出图标点坐标值和对应实际点的仪器显示 坐标值的差值 , 按照校正参数值与经维度变量的对应关系调节校正参数 , 可使 GPS 的定位误差小 于 6m。 关键词 : GPS ; 地质测量 ;准确校正 中图分类号 : P208
在实际工作中 , 需在工作区内选定的控制点上
求取 ΔJ 、ΔW 的平均值[4] ,再用 (4) 、(5) 式计算出仪
器的校正参数 ΔX 、ΔZ ,对仪器进行参数设置 ,ΔY 设
置为 0 , 基本参数的设置可参照表 1 。参数设置完
麦哲伦手持GPS使用方法

麦哲伦(explorist)手持GPS500操作步骤:
1.开机↓菜单→系统设置↓选择→地图单位→导航单位设置(添公里米
公里/小时)、按确定。
坐标投影(选自定义坐标系统,投影选横向墨卡托,按确定)自定义坐标系里原点纬度填0、原点经度(输入中央子午线)→比例因子=1↓通用米单位1↓原点向东偏移(50万)↓原点向北偏移=0↓→完成↓↓ESC(X)退出→系统设置→方向键→选择语言↓(CH中国)↓;
2.菜单→去兴趣点↓我的兴趣的↓(mark)→标志→方向→坐标↓(红)
输入坐标→方向键→先输入Y(E)后输入X(N)(数字)↓保存↓。
3.菜单→兴趣点↓我的兴趣的↓方向键找到要去的点↓。
4.在已知点上调坐标:在“地图单位”下的参考椭球下选“用户”
DA=-108,DF=0.00480795 DX,DY,DZ仔细调。
麦哲伦子午线手持GPS 快速上手指南
麦哲伦子午线手持GPS 快速上手指南1 如何用子午线GPS?再没比这更简单的了,装上电池开机就行了!用啥电池?两节普通的五号碱性电池,不要用廉价的碳性电池啊。
为了保护环境,用充电电池更好。
如何开机?按右下角的PWR键啊!2 为什么按PWR键之后没反应?电池没电了吧?正负极没装反吧?3 按PWR键之后屏幕显示几行字,过一会就自动关机,机器出问题了吧?哈哈,又个小诀窍,子午线开机之后,连按三下ENTER(回车键),就不会自动关机了。
为啥自动关机,因为它在警告你GPS给出的信息仅供参考,如果不同意就自动关机,必须按ENTER表示同意才行。
4 为什么按PWR键之后屏幕闪几下就再没有任何显示?哈哈,用得很深入嘛,竟然这么快就把开关机保护功能给启动。
为了方式误触发,子午线GPS都有开关机保护功能,启动这个功能之后,必须长按PWR 键,直到开机画面出现才能真正开机;关机要先按PWR键,然后按ENTER键。
5 开关机保护功能在哪里设置?在开机状态,按MENU键,选择“系统设置”,按ENTER进入,再选择“选择开关机方式” ,按ENTER键进入,要不要开关机保护,自己选择吧。
6 屏幕背光怎么打开/关闭?长按PWR键。
子午线GPS有两种亮度的背光,接外接电源的时候,可以用强背光,用电池的时候,最好用弱背光,并在不用的时候及时关掉背光7 背光会自动关闭吗?当然!背光灯时间有“30秒/1分钟/2分钟/4分钟/10分钟/一直开着”六档可选,出厂时默认是4分钟自动关背光,可以自己随时调整,背光灯选项在“系统设置”内“设置背光灯”。
不过背光灯自动关闭只在用电池的时候有效,一旦接上外接电源,背光灯自动就是长亮的,除非手工关闭背光。
8 如何设置北京54或西安80坐标系?方法很简单,但是需要5个参数,这5个参数可以从当地测绘部门获取,也可以从设置好的GPS中读出。
第一步,在任意画面按MENU键,进入“系统设置”,然后进入”选择坐标系“,选”主位置画面“,在出现的列表中选择最下边的”自定义“或”User Grid“,选第一行的“横向墨卡托”,用箭头键和ENTER键输入当地的中央纬线(00.00000N)和中央经线(XXX.00000E),进入下一页,然后用同样的方法设置投影比例(1.00000000)、尺度比(1.00000000)、东西偏差(00500000.0)和南北偏差(00000000.0),然后按“完成”按钮。
手持GPS的校正方法
手持GPS的校正方法GPS所使用的坐标系统是WGS-84坐标系统,而我们使用的地图资源大部分都属于1954年北京坐标系或1980年西安坐标系。
不同的坐标系统给我们的使用带来了困难,于是就出现了如何把WGS-84坐标转换到1954北京坐标系或1980西安坐标系上来的问题。
从理论上讲,不同坐标系之间存在着平移和旋转的关系,要使手持GPS所测量的数据转换为自己需要的坐标,必须求出两个坐标系(WGS-84和北京54坐标系或西安80坐标系)之间的转换参数。
由于求算转换参数专业性较强,因此,多数初用者不知如何进行GPS的参数的求得和设置。
其实关键要解决两个问题,其一是自定义坐标格式(User UTMGrid)的确定;其二是自定义坐标系统(User)投影参数的确定。
GPS(GlobalPositioning System)即全球卫星定位系统,是由美国建立的一个卫星导航定位系统,利用该系统,用户可以在全球范围内实现全天候、连续、实时地进行三维导航定位和测速。
随着GPS 定位技术的发展,从最初的军用已发展到民用领域,并已得到广泛的应用和普及。
在GPS定位技术的应用和发展过程中,根据不同的市场需求,由厂家生产出了各种不同型号和用途的接收机,其中,市场销量最大、使用人数最多、使用者大多专业性不强的导航型手持GPS在使用过程中存在的问题较多,最主要的问题是手持GPS所使用的坐标系统是WGS-84坐标系统,而我们使用的地图资源大部分都属于1954年北京坐标系或1980年西安坐标系。
不同的坐标系统给我们的使用带来了困难,于是就出现了如何把WGS-84坐标转换到1954北京坐标系或1980西安坐标系上来的问题。
从理论上讲,不同坐标系之间存在着平移和旋转的关系,要使手持GPS所测量的数据转换为自己需要的坐标,必须求出两个坐标系(WGS-84和北京54坐标系或西安80坐标系)之间的转换参数。
由于求算转换参数专业性较强,因此,多数初用者不知如何进行GPS的参数的求得和设置。
麦哲伦500导航GPS常见问题(样例5)

麦哲伦500导航GPS常见问题(样例5)第一篇:麦哲伦500导航GPS常见问题Q: 探险家接收机有多少种型号,有什么区别?A: 主要有探险家100/200/210/300/400/500/600。
它们的区别主要在显示屏、电池和外接存储卡,以及一些功能上的不同。
探险家100/200/210/300和400是4级单色显示屏(400是高分辨率的),探险家500和600是彩色高分辨率显示屏;探险家100/200/210/300用的是2节5号电池,探险家400,500和600用的是充电电池。
探险家100/200/210/300的数据只能保存在内存里,而探险家400,500和600有外接SD卡选项。
详细的比较,可参见eXplorst探险家系列对比表。
Q: 探险家接收机可以和SporTrak和Meridian的底图兼容吗? A: 不可以。
Q: 如何正确的连接我的探险家400/500/600到USB和电源?A: 在您的探险家和交流电源以及USB接口和计算机连接之前,应先将USB接口接到您的接收机背面。
必须按如下顺序连接电缆和电源。
请按以下连接顺序:1、将探险家的USB接头接到探险家接收机上2、将USB的另一端接到PC上3、将AC电源接到探险家的USB电缆上Q:为什末探险家连接不到电脑上? A:从以下几点中排查:A.没有关闭同步软件ACTIVESYNC中的“允许使用COM1,COM2”选项,是同步软件占用了端口B.没有在“高级功能--通讯”中调节USB为“文件传输”或者“NEMA数据通讯”模式前者是将GPS作为一个移动硬盘,可以直接“复制粘贴” 文件;后者是连接笔记本电脑作为一个GPS MOUSE来用,但是不能拷贝航点、航线数据;两个模式都可以连通GPS和 MAPSEND C.驱动没有安装 D.设备没有开机Q: 我的探险家可以保存多少藏宝点?A: 藏宝点也是一种兴趣点(POI)。
在内部存储器中,您可以存储500个藏宝点或兴趣点。
一种快速准确校正手持式GPS的方法
午线 , 由于实 际地 质 图 中 1 / 2 . 5万 以下 的小 比例 尺
地形 图常 用 6 。 带 的带 号 、 1 / 1万 以 上 的 大 比例 尺地 形 图常用 3 。 带 的带 号 。若 以 L 0表 示 中央 子 午 线 ,
N3 , N6分 别代 表 3 。 带、 6 。 带 的带 号 , 则 二 者 中 央 经 线分 别 为 L 0 一N3 ×3 。 , L 0 :N3 ×6 。 一3 。 。
2 . 1 . 2 根 据大地 坐标 值 确定 中央 经度
若 已知 目标 点 的 大地 坐标 值 ( B, L) , 而设 计 图 的平 面直 角 坐标值 没 标 出带 号 , 此 时可 用 该 方 法 确 定该 区的 中央经 度 。此 时 , 首 先 判 8 4直 角坐 标 系转 换 成 北 京 5 4坐 标 系或 1 9 8 0年西 安坐 标 系 , 消 除该误 差 才能使 用 。
定 位 系统 , 它 主要用 来在 全球 范 围 内实 时进 行定 位 、
导 航 。具 高精 度 、 全天候 、 高效 率、 多 功能、 操 作 简
便、 应 用广 泛 等 优 点_ 1 ] 。尤 其 是 手 持 式 GP S导 航
2 GP S误 差 的 消 除
2 . 1 中 央 经 度 的 确 定
仪, 在 野外 测绘 、 地质填图、 野 外 物 化 探 等工 作 中发
挥 了越 来 越大 的作 用 , 已成 为 地 质 工 作 人员 必 不 可
收稿 日期 : 2 0 1 2一O 6—2 5; 修 订 日期 : 2 0 1 2—0 9—1 8 ; 编辑 : 曹 丽 丽
手持式GPS参数调整方
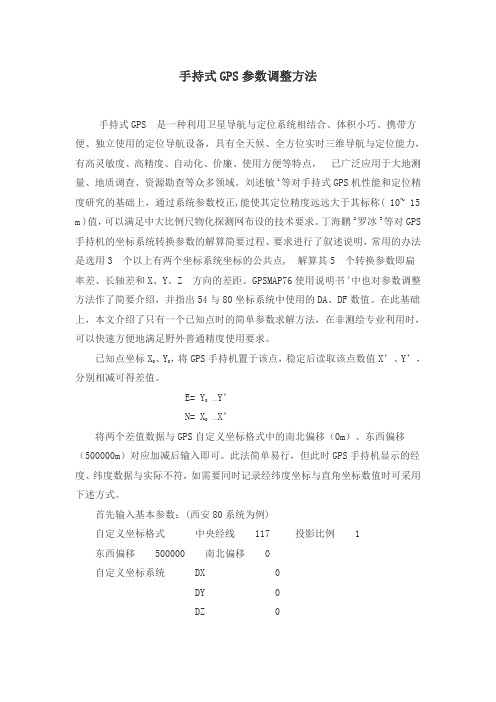
手持式GPS参数调整方法手持式GPS 是一种利用卫星导航与定位系统相结合、体积小巧、携带方便、独立使用的定位导航设备,具有全天候、全方位实时三维导航与定位能力,有高灵敏度、高精度、自动化、价廉、使用方便等特点, 已广泛应用于大地测量、地质调查、资源勘查等众多领域。
刘述敏1等对手持式GPS机性能和定位精度研究的基础上,通过系统参数校正,能使其定位精度远远大于其标称( 10~ 15 m )值,可以满足中大比例尺物化探测网布设的技术要求。
丁海鹏2罗冰3等对GPS 手持机的坐标系统转换参数的解算简要过程、要求进行了叙述说明,常用的办法是选用3 个以上有两个坐标系统坐标的公共点, 解算其5 个转换参数即扁率差、长轴差和X、Y、Z 方向的差距。
GPSMAP76使用说明书4中也对参数调整方法作了简要介绍,并指出54与80坐标系统中使用的DA、DF数值。
在此基础上,本文介绍了只有一个已知点时的简单参数求解方法,在非测绘专业利用时,可以快速方便地满足野外普通精度使用要求。
已知点坐标X0、Y,将GPS手持机置于该点,稳定后读取该点数值X’、Y’,分别相减可得差值。
E= Y0 —Y’N= X0 —X’将两个差值数据与GPS自定义坐标格式中的南北偏移(0m)、东西偏移(500000m)对应加减后输入即可。
此法简单易行,但此时GPS手持机显示的经度、纬度数据与实际不符,如需要同时记录经纬度坐标与直角坐标数值时可采用下述方式。
首先输入基本参数:(西安80系统为例)自定义坐标格式 中央经线 117 投影比例 1东西偏移 500000 南北偏移 0自定义坐标系统 DX 0DY 0DZ 0DA -3(54系统为-108) DF 0 (54系统为0.0000005) 在DX、DY、DZ 均置0时,按上述方法在已知点读取该点数值X’、Y’,计算出差值E 、N。
其他参数不变,将DX 设为任一常数Δ,如1000,存储后读取GPS 直角坐标数值,记为X dx Y dx ,将其与X’、Y’相减,找出当DX 单独变化时对X、Y 坐标数值的影响变化幅度,记为:E x =( Y dx — Y’) / Δ N x =( X dx — X’) / Δ同样,将DX 置0,将DY 设为1000,存储,读取GPS 直角坐标数值,记为X dy Y dy ,将其与X’、Y’相减,找出当DY 单独变化时对X、Y 坐标数值的影响变化幅度,记为:E y =( Y dy — Y’) / Δ N y =( X dy — X’) / Δ根据计算数据E 、N、E x 、N x 、E y 、N y ,求解未知量DX、DY,建立方程组:E x * DX + Ey *DY= EN x * DX + N y * DY= N解得 DX =(E * N y — Ey *N)/(E x * N y — Ey *N x )DY =(E x * N — E * N x )/(E x * N y — E y *N x )将DX、DY 数值输入,DZ 仍为0,此时,已知点坐标读数会与X 0、Y 0相同,且经度纬度坐标读数也与其他软件计算结果一致。
罗盘校准方法

罗盘校准方法
罗盘校准是指调整罗盘仪表指针的指向,使其准确指向地理北极点。
以下是详细的罗盘校准方法:
1. 罗盘仪表要在平稳的地方安装好,尽可能不受外部影响,例如电子设备和金属物品等。
安装时需要使用包括垂直水平仪、水平器等工具来使其水平。
2. 罗盘仪表上通常有一个旋钮或调节器,可以调整罗盘仪表的线圈。
调整线圈,让罗盘指针转动,在调整时需要使其慢慢转动。
3. 将罗盘指针缓慢转到最东边,当罗盘指针停止时,用精确度更高的罗盘或GPS验证罗盘指针的精度。
4. 将罗盘指针缓慢转到最北边,同样需要用精确度更高的罗盘或GPS验证罗盘指针的精度。
5. 根据验证结果,如果罗盘指针需要调整,再次继续调整线圈,根据上述步骤重新校准罗盘仪表。
若已准确无误,保存。
电子罗盘标定方法

1. 设定坐标系共涉及几个坐标系,方块坐标系(电子罗盘),大地坐标系,倾角传感器坐标系,磁敏感元件坐标系,转台坐标系,分别记为: 方块坐标系()123:e e e e ;大地坐标系()123:ζζζζ;倾角传感器坐标系()123:ξξξξ;磁敏感元件坐标系()123:εεεε;转台基准坐标系()123:ςςςς其中大地坐标系由重力方向和磁北方向决定,竖直朝下方向为z 方向,磁北方向为x 方向,朝东方向为y 方向。
方块坐标系、倾角传感器坐标系、磁敏感元件坐标系在安装时尽量保持一致。
逆时针方向为正向(转盘从上往下看顺时针转动为逆向转动!) 所有的角度保持在区间[)0,2π2. 获取磁敏感方向水平分量与1e 夹角,磁偏角转盘调水平,方块轴线(任意边)与转盘零度线对准,此时,转盘基准坐标系定为()123:ςςςς,分别指向于北方(近似),东方(近似),垂直向下。
磁场大小及方向在大地坐标系内的矢量记为:()()3012301233sin sin 00cos cos B B B B B βζζζζζζζβζ∠⎛⎫⎛⎫⎪ ⎪== ⎪ ⎪⎪ ⎪∠⎝⎭⎝⎭,其中3B βζ=∠,转盘基准坐标系与大地坐标系z 轴相同,xy 轴相差角度11ςζ∠,则两个坐标系之间的转换矩阵为:11111111cos sin 0sin cos 0001M ςζςζςζςζςζ∠-∠⎛⎫⎪=∠∠ ⎪ ⎪⎝⎭,即()()123123M ςζςςςζζζ=或M ςζςζ= 同理,令方块坐标系()123:e e e e 与磁敏感元件坐标系()123:εεεε、倾角传感器坐标系()123:ξξξξ关系为:()()()123123123e e e e e M M ξεξξξεεε==则磁场在转台基准坐标系内表示为:()()113012301231133sin cos sin 0sin sin cos cos B B B M B B B ςζβςζζςςςςςςςζζβζ∠∠⎛⎫⎛⎫⎪ ⎪==∠∠ ⎪⎪ ⎪ ⎪∠⎝⎭⎝⎭磁敏感元件极大值出现于磁敏感方向与地磁场夹角最小的时候,零值出现于垂直之时。
电子罗盘使用方法
电子罗盘使用方法
电子罗盘是一种常见的导航仪器,它可以通过使用磁场传感器检测地球磁场的变化来确定方向。
以下是电子罗盘的使用方法:
1. 打开电子罗盘:通常电子罗盘上有一个开关按钮,将其打开以开始使用。
2. 校准电子罗盘:在使用电子罗盘之前,需要先进行校准。
将电子罗盘保持水平并远离任何可能产生磁场干扰的物体,然后按照说明书上的指示进行校准。
3. 观察指针:电子罗盘上通常有一个指针或显示屏,用来指示当前的指南针方向。
根据指针的位置,可以确定正北方向以及其他方向。
4. 寻找方向:将电子罗盘保持水平并远离磁场干扰的物体,然后观察指针的位置。
指针通常会指向磁北或地理北方向。
根据指针的位置,可以确定其他方向,如东、西、南。
5. 长时间使用:如果需要长时间使用电子罗盘,建议定期进行校准,以确保准确性。
同时,避免将电子罗盘放在与强磁场接触的物体附近,以免干扰其正常功能。
总的来说,使用电子罗盘非常简单,只需校准后通过观察指针的位置确定方向即可。
需要注意的是,电子罗盘对磁场干扰敏感,因此在使用过程中需避免接触磁场干扰物体,确保准确性。
手持式GPS定位误差的校正方法

手持式GPS定位误差的校正方法
徐海振;冯创业
【期刊名称】《河北地质》
【年(卷),期】2004(000)004
【摘要】在野外进行地质调查时,许多单位采用麦哲伦公司的手持式GPS卫星定位导航仪进行位置定位,为了在野外方便地将调查点的位置上到地形图上,普遍要求使用大地坐标(UTM).但是,手持式卫星定位导航仪在定位大地坐标(UTM)时存在明显误差,水平定位的最大误差超过2km.该文根据GPS的参数设置,总结出一套手持式GPS定位大地坐标的误差校正方法,使野外调查点水平定位误差小于100m.
【总页数】3页(P24-26)
【作者】徐海振;冯创业
【作者单位】河北省地质调查院,石家庄,050081;河北省地质调查院,石家
庄,050081
【正文语种】中文
【中图分类】P2
【相关文献】
1.手持式GPS定位误差的研究 [J], 张丽娜;杨志强;欧龙;张红英
2.联合校正源空域信息和时域波形信息的乘性阵列误差校正方法 [J], 王鼎;姚晖;吴瑛
3.一种手持式MEMS磁力计的罗差校正方法 [J], 李思民;蔡成林;王亚娜;曹振强
4.一种快速准确校正手持式GPS的方法 [J], 蔡力挺;殷国鹏;王颖;李少刚
5.一种手持式电子磁罗盘航向误差校正方法 [J], 徐德昌;蔡成林;李思民;王亚娜因版权原因,仅展示原文概要,查看原文内容请购买。
野外测量手持GPS的校正方法

野外测量手持GPS的校正方法手持式GPS 是一种利用新一代卫星导航与定位系统(globalpositioningsystem, GPS)相结合、体积小巧、携带方便、独立使用的定位导航设备,具有全天候、全方位实时三维导航与定位能力,有高灵敏度、高精度、自动化、价廉、使用方便等特点,已广泛应用于大地测量、地质调查、资源勘查等众多领域。
近年来,我院在对手持式GPS机性能和定位精度研究的基础上,将其运用于中小比例尺的地质填图、物化探测网布设工作中,既大大提高了工作效率、节约了成本。
在GPS定位技术的应用和发展过程中,根据不同的市场需求,生产厂家研制生产出了不同用途和型号的接收机.无论是高精度的测量型GPS,还是导航型手持GPS,其所提供的坐标都是以美国的WGS-84 坐标系统而建立的,而我们的地质工作底图使用的是1954年北京坐标系(北京54系)或1980西安坐标系(西安80系),不同的坐标系统之间按一定的数学模型可计算出其间的转换关系,也就是我们常说的转换参数.转换参数的确定给我们使用GPS提供了便利.我们把求取转换参数的工作过程称为GPS 的校正。
我们以我院现有的几款手持GPS的校正过程做下介绍。
1手持GPS校正前的几项准备工作在进行手持GPS校正前,我们首先要确定工区测量使用的坐标系统,其次要确定工作区底图的坐标分带.从而确定该坐标带的中央子午线,这样才可以保证手持GPS机所测的坐标和地质底图的使用坐标是一致的。
1.1确定工作区坐标系统我们居住的地球的形状大致为赤道方向略长、两极方向略偏,以南北两极为轴的旋转椭球体。
为确定地球表面的地物及空间点相对地球的空间位置,人们定义了不同的椭球体模型,不同的椭球体模型按照不同的投影方法定义了不同的坐标系统。
下表是我国现行使用中的几种坐标系统对应椭球名称和椭球参数:其中,1954年北京坐标系已基本退出测绘舞台,只有少数特定工作区还在采用该坐标系统;1980 西安坐标系是我们现在工作中主要采用的坐标系统;2000中国大地坐标系已于2008年7月1日启动使用,我们现有的测绘成果将逐步过渡到该坐标系。
罗盘校正磁偏角详细步骤
地球上任一点的磁北方向与该点的正北方向不一致,这两方向间的夹角叫磁偏角。
地球上某点磁针北端偏于正北方向的东边叫做东偏,偏于西边称西偏。
东偏为(+)西偏为
地球上各地的磁偏角都按期计算,公布以备查用。
若某点的磁偏角已知,则一测线的
磁方位角A磁与正北方位角A的关系为A等于A磁加减磁偏角。
应用这一原理可进行磁
偏角的校正。
校正时可旋动罗盘的刻度螺旋,使水平刻度盘向左或向右转动,磁偏角东偏则向右,
西偏则向左,使罗盘底盘南北刻度线与水平刻度盘0--180度连线间夹角等于磁偏角。
经校正后测量时的读数就为真方位角。
杨四解释:
1、罗盘需要读出的数据应当为真北数据,包括通常用的GPS也是设置为真北数据。
2、地球上某点磁针北端偏于正北方向的东边叫做东偏,偏于西边称西偏。
东偏为(+)西偏为(-)。
见上图。
3、罗盘上的指针指示方向为磁北方向,一般罗盘带白点的针指向北,带磁线圈的针指向南。
4、中国除了新疆局部地方,其他地方均为西偏。
河北-6 度。
电子罗盘24点校正步骤

一、注意事项:校正前请远离电脑,并确保身上未佩戴手带、皮带等含铁金属物件,尽量在室外,四周无高楼的开阔地进行校正。
二、24点校正步骤在罗盘的设置界面下,打开校正开关, 此时开始进行 24 点校正,屏幕上会显示罗盘校正次数。
校正第1个点时,请先保持本机上仰15°,保持 2~3 秒;采集第2个点时,水平旋转90°,保持 2~3 秒;采集第3个点时,水平旋转90°,保持 2~3 秒;采集第4个点时,水平旋转90°,保持 2~3 秒;采集第5个点时,水平旋转90°回到起始点,上仰55°,保持 2~3 秒;采集第6个点时,水平旋转90°,保持 2~3 秒;采集第7个点时,水平旋转90°,保持 2~3 秒;采集第8个点时,水平旋转90°,保持 2~3 秒;采集第9个点时,旋转90°回到起始点,下府15°,保持 2~3 秒;采集第10个点时,水平旋转90°,保持 2~3 秒;采集第11个点时,水平旋转90°,保持 2~3 秒;采集第12个点时,水平旋转90°,保持 2~3 秒;采集第13个点时,旋转90°回到起始点,同时下府55°,保持 2~3 秒;采集第14个点时,水平旋转90°,保持 2~3 秒;采集第15个点时,水平旋转90°,保持 2~3 秒;采集第16个点时,水平旋转90°,保持 2~3 秒;采集第17个点时,旋转90°回到起始位置,俯仰角调整为0°,调整横滚角为+15°,保持2~3秒;采集第18个点时,水平旋转90°,调整横滚角为-15°,保持 2~3 秒;采集第19个点时,水平旋转90°,调整横滚角为+15°,保持 2~3 秒;采集第20个点时,调整横滚角为 -15°,保持 2~3 秒;采集第21个点时,旋转90°回到起始位置,调整横滚角为55°,保持 2~3 秒;采集第22个点时,水平旋转90°,调整横滚角为 -55°,保持 2~3 秒,采集第23个点时,水平旋转90°,调整横滚角为+55°;采集第24个点时,水平旋转90°,调整横滚角为 -55°,保持 2~3 秒。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
� 关机状态下按 NAV+开机键, 选择 “22” 清除数据, 关机后再按 NAV+ 开机键,选择“21”罗盘校准,按“Enter” 。 � 把手持机正面朝上放置在一个水平面上,按“Enter” 。 保持不动,等待蜂鸣声。 � 顺时针旋转90°,保持不动,等待蜂鸣声。 � 瞬时针旋转180°,保持不动,等待蜂鸣声。 � 顺时针旋转270°,保持不动,等待蜂鸣声。 � 一边侧立,头朝向您。保持不动,等待蜂鸣声。 另一边侧立,头朝向您。保持不动,等待蜂鸣声。 头朝上,正面朝向您。保持不动,等待蜂鸣声。 底朝上,正面朝向您。保持不动,等待蜂鸣声。 正面朝下放置,头朝向您。保持不动,等待蜂鸣声。 把手持机放置在一个远离金属物体的水平面上,按“Enter” 。 � 顺时针旋转,保持箭头指向你。 � 罗盘校准完成