系统函数
系统函数(网络函数)H(s)解读

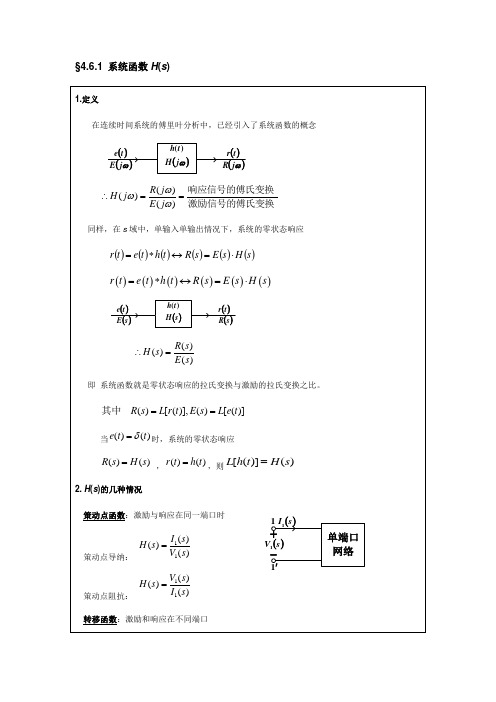
§4.6 系统函数(网络函数)H (s )•系统函数; LTI 互联网络的系统函数;并联;级联; 反馈连接一.系统函数 1.定义响应的拉氏变换与激励的拉氏变换之比2.H (s )的几种情况策动点函数:激励与响应在同一端口时策动点导纳 策动点阻抗转移函数:激励和响应不在同一端口转移导纳 转移阻抗电压比 电流比()()()s H s E s R ⋅=↔)()()(s E s R s H =∴()()()t h t e t r *=)]([)()],([)( t e L s E t r L s R ==其中系统的零状态响应时当 ,)()(t t e δ=)()(s H s R =)()(t h t r =)()]([s H t h L =则单端口网络()s I 1+-()s V 111')()()(11s V s I s H =)()()(11s I s V s H =+-()s V 2)()()(12s V s I s H =)()()(12s I s V s H =)()()(12s V s V s H =)()()(12s I s I s H =3.求H (s )的方法微分方程两端取拉氏变换→利用网络的s 域元件模型图,列s 域方程→4.应用:求系统的响应二.LTIS 互联的系统函数 1.LTI 系统的并联2.LTI 系统的级联3.LTI 系统的反馈连接()()s H t h →()()()s E s R s H =()()()s E s R s H =)()()()()(t h t e t r t h s H *=→→方法一:)()()()(t r s E s H s R →=方法二:()()()t h t h t h 21+=)()()(21s H s H s H +=)()()( :21t h t h t h *=时域)()()( :21s H s H s H ⋅=频域()s H 1()s H 2()s E ()s R ()s H 1()s H 2()s E ()s R ()s E 1()s E 2-+)()()(21s E s E s E -=)()()(22s H s R s E ⋅=[])()()()(21s E s E s H s R -⋅=4.结论在s 域可进行代数运算:比较H (s )和H (p )例4-6-1(1)在零起始状态下,对原方程两端取拉氏变换(2))()()()(211s E s H s E s H -=)()()()()(211s R s H s H s E s H ⋅-=)()(1)()()()(211s H s H s H s E s R s H +==∴()。
第七章系统函数

∏ ∏
i =1 j =1 n
m
(s − z j ) ( s − pi )
(7―2)
把系统函数的零点与极点表示在s平面上的图形, 把系统函数的零点与极点表示在s平面上的图形, 叫做系统函数的零、 极点图。 其中零点用“ 叫做系统函数的零 、 极点图 。 其中零点用 “ o” 表示 。 表示。 极 点 用 “ ×” 表 示 。 若 为 n 重 极 点 或 零 点 , 则 注 以 ( n) 。 例如某系统的系统函数为
H ( s) = H 0
∏ ∏
i =1 m j =1 n
m
(s − z j ) (s − p j ) ( jω − z j ) ( jω − p j )
H ( jω ) = H 0
∏ ∏
i =1 j =1 n
(7―8)
图7.3中画出了由零点zj和极点pi与虚轴上某点jω连接 中画出了由零点z 和极点p 与虚轴上某点jω jω连接 构成的零点矢量jω 和极点矢量jω 构成的零点矢量jω-zj和极点矢量jω-pi。图中Nj、Mi分别 jωjω图中N 表示矢量的模,θ 表示矢量的模,θj、φi分别表示矢量的相角,即 分别表示矢量的相角,
当正弦激励信号的频率ω 改变时, 当正弦激励信号的频率 ω 改变时 , 稳态响应的幅度和相 位将分别随着H jω) 位将分别随着 H ( jω ) 和 φ ( ω ) 变化 ,H ( jω ) 反映了 变化,H jω) ,H( 系统在正弦激励下稳态响应随频率变化的情况, 系统在正弦激励下稳态响应随频率变化的情况 , 故又称系统 的频响特性。 的频响特性。 若 H ( s ) 的极点均位于 s 左半平面 , 令 s=jω, 也就是在 s 的极点均位于s 左半平面, s=jω,也就是在 也就是在s 平面上令s沿虚轴变化,则有H(s)|s=jω=H(jω), 平面上令s沿虚轴变化,则有H(s)|s=jω=H(jω),即为系统的 H(s)|s=jω=H(jω),即为系统的 频响特性。根据H 频响特性。根据H(s)在s平面的零、极点分布情况可以绘 平面的零、 制出频响特性曲线,包括幅频特性|H(jω)| 制出频响特性曲线 , 包括幅频特性 |H(jω)| 曲线和相频特性 |H(jω)|曲线和相频特性 φ(ω)曲线 下面介绍这种方法。 φ(ω)曲线,下面介绍这种方法。 曲线, 由式( 由式(7―2),系统函数H(s)的表示式为 系统函数H
系统函数(网络函数)H(S)

二.H(s)零、极点与h(t)波形特征的对应
11
页
1.系统函数的零、极点
H (s) A(s) K (s z1 )(s z2 ) (s z j ) (s zm ) B(s) (s p1 )(s p2 ) (s pk ) (s pn )
z1 , z2 zn 系统函数的零点
在s域分析中,借助系统函数在s平面零点与极点 分布的研究,可以简明、直观地给出系统响应的许多 规律。系统的时域、频域特性集中地以其系统函数的 零、极点分布表现出来。
主要优点:
1.可以预言系统的时域特性; 2.便于划分系统的各个分量
(自由/强迫,瞬态/稳态); 3.可以用来说明系统的正弦稳态特性。
第
et[cos(3t) sin(3t)]u(t) et 2 sin(3t 45o )u(t)
两系统函数仅是零点不同,它们对应的冲激响应仅是响应幅 度和相位不同,响应波形的模式均为衰减振荡模式
三.H(s) 、E(s)的极点分布与自由响应、强
第
迫响应特性的对应
17 页
激励: e(t) E(s) u
第
二阶极点
15
页
H(s) 1 , 极点在原点, h(t) tu(t), t , h(t) s2
H(s) 1 ,极点在实轴上, (s a)2
h(t) t et u(t),α 0, t , h(t) 0
H
(s)
(s2
2s ω2
)2
,
在虚轴上,
h(t) t sintu(t), t , h(t) 增幅振荡
系统函数:h(t) H(s) m
(s zl )
(s zj )
E(s)
l 1 v
H(s)
j 1 n
第七章 系统函数

H ( e j ) H ( z ) z e j bm (e j zi )
i 1 m
(e p )
j i i 1
n
j j ( e z ) 和 ( e pi ) 为复数,故令 由于是 i
是当h(t)不满足绝对可积条件时,则至少有某个有界输 入f(t)产生无界输出yf(t)。 为此,设f (t)有界,则 f(-t)也有界,并且表示为
1 f ( t ) sgn[h(t )] 0 1
于是有
h(t)>0 h(t)=0 h(t)<0
h(t ) f (t ) h(t )
1 2
j j j 令 Be jw , A1e jw p1, A2e jw p2 ,
则H(jω)又可表示为
Be j B j ( 1 2 ) j (w ) H ( jw ) e | H ( j w ) | e A1e j1 A2e j 2 A1 A2
二、 H(s)与系统的频率特性 若系统的系统函数H(s)的极点全部在左半平面, 即H(s) 的收敛域包含 jω 轴,则
H ( jw ) H ( s ) s jw
bm ( jw si )
i 1 m
H ( jw ) H ( s ) s jw
( jw p )
i 1 i
第七章 系统函数
B() H () A()
连续系统
B( s) bm s m bm1s m1 b1s b0 H ( s) n A( s) s an1s n1 a1s a0
离散系统
B( z) bm z m bm1 z m1 b1 z b0 H ( z) n A( z) z an1 z n1 a1 z a0
【信号与系统】03-系统函数的性质

【信号与系统】03-系统函数的性质1. 系统函数的性质1.1 变换的对偶性 不管是傅⾥叶变换的频域还是拉普拉斯变换的s域(下⾯统称s域),都是深⼊讨论LIT系统的有⼒⼯具,有时甚⾄是必备⼯具。
s域的系统函数和时域的信号(单位冲激响应)是⼀对共⽣体,它们通过拉普拉斯变换⽣成彼此,同时也是连接两个域的纽带。
对⼀个函数解析式,经常要对它做⼀些常规的分析操作,⽐如运算、平移、缩放、微积分、卷积等。
⼀个很⾃然的问题是,在某个域的分析操作会对另⼀个域带来什么影响呢?本篇就来讨论这个问题。
在正式讨论之前,有必要再回顾⼀下拉普拉斯变换的公式。
你可能⼀开始就注意到,正反变换存在⼀定的“对称性”,⽽仅在局部有微⼩差别。
在数学上,两个概念如果通过类似的⽅法互相定义,它们就称为对偶的,从形式上不难看出,互为对偶的概念的性质也是对偶存在的,这就省去了相似论证的⿇烦。
信号x(t)和拉普拉斯变换H(s)之间不具有严格的对偶性,但这样的相似性仍然可以被使⽤。
如果记χ(ω)=eσ√2πX(σ+jω),将得到更为对称的式(1),把这个关系记作变换T,显然有式(2)成⽴。
以后变换的性质如果本⾝不是对称的,可以运⽤该式迅速得到另⼀个对称的性质,当然简单的性质直接证明会更快。
x(t)=1√2π∫∞−∞χ(ω)e jωt dω;χ(ω)=1√2π∫∞−∞x(t)e−jωt d t x(t)T↔χ(ω)⇔χ(t)T↔x(−ω)1.2 拉普拉斯变换的性质 以下按函数运算的复杂程度,罗列LT的基本性质,过于直⽩的结论不加证明。
需要注意的是,性质成⽴有它⾃⼰的ROC,并不完全受限于原LT的ROC。
还有我们知道,ROC和积分在具体的s上的收敛性是不同的,以下性质在ROC外的收敛点仍然可以是成⽴的。
⾸先是函数的线性运算,在s域也是线性的(式(3))。
然后看函数的平移,容易有式(4)左成⽴,在s域的平移还有式(4)右成⽴,这是⼀组对偶性质。
当对函数进⾏伸缩时,频谱系数也跟着反⽐例伸缩(式(5)左);特别地,a=−1时表⽰函数左右翻转(旋转180度),s域则也跟着旋转180度(式(5)右)。
系统函数的定义

系统函数的定义
系统函数定义
1、系统函数
系统函数是一类特殊的程序函数,用来实现由操作系统提供的功能,这些功能不能由应用程序直接实现,而是由操作系统来完成。
2、系统函数的定义
系统函数是一类特殊的程序函数,它们用来实现由操作系统提供的功能,而这些功能无法由应用程序直接实现。
系统函数是操作系统提供给应用程序的公共接口,通过调用系统函数来实现操作系统提供的功能。
3、系统函数的特点
(1)系统函数是可重入的,这是因为它必须支持多个任务同时运行。
(2)系统函数是可移植的,这是因为它必须能够移植到不同平台。
(3)系统函数是可调试的,这是因为它必须能够被调试以便发现问题并进行修复。
(4)系统函数是安全的,这是因为它必须能够确保操作系统的安全性。
- 1 -。
12.3系统函数的零点和极点

系统函数的零——极星图。下面将
得到证实,通过零点、极点的分布
可以预见响应的基本特征。
2 中北大学国家级电工电子实验教学示范中心
系统函数的零点和极点
仍以RLC串联电路为例,若以电压源为激励,电
流为响应,其系统函数为策动点导纳
H s
I s Us s
R
1 sL 1
sC
1 L
s2
s Rs
1
s
k1h
p1
★式中H0是实系数。当s取值分别等于p1、p2、…pn 时系统函数存在极值,则这些取值点称为系统函 数的极点。又当s取值分别等于z1、z2、…zm时则系 统函数为0,则这些取值点称为系统函数的零点。
★可见零点、极点是变量s的特殊取值点,它对响 应产生重要影响。
1 中北大学国家级电工电子实验教学示范中心
s
k2h p2
L LC
可见,当s = 0时存在零点,它在复平面的原点。
对于极点我们已经很熟悉
R p1,2 2L
R
2
1
2L LC
2 02
★因为该例仍是二阶电路,根据参数的不同,极 点会有三种不同的情况。
3 中北大学国家级电工电子实验教学示范中心
系统函数的零点和极点
★①当δ>ω0,这是过阻尼情况( R>2 L)C 。p1、 p2是一对不等的负实根且∣p2∣>∣p1∣。 此时极点落在负实轴上,如图所 示。这能说明什么问题呢?假如 是阶跃激励,请看响应
I s H sU s 1
s
Us
L s2 sR L 1 LC s
Us L
s2
sR
1 L
1
LC
s
k1
p1
第七章 系统函数

• H ejω 即h(n)的DTFT • ejω 为周期函数,所以 H ejω 为周期函数,其周期为 2π 。
通过本征函数透视系统的频响特性
设输入xn ejn
为本征函数
xn hn yn
hn为稳定的因果系统
yn hn xn
h m ejωnm e j n h m ejω m
1 M1 ejθ1
V2 ej ω V1
ω
O
1
ω
式中:V2= 1 V1 RC
1 M
, = -θ 1
45
RC
90
低通网络,截止频率位于ω 1 处 RC
例研究右图所示二阶RC系统
的频响特性H
jω
V2 jω V1 jω
,
注意,图中kv3是受控电压 v1t
R1 C1
v3t
C2 kv3 R2
v2 t nO Nhomakorabean
θ2
ω
ω
系统对不同频率的输入,产生不同的加权,这就是系 统的频率响应特性。
由系统函数得到频响特性
离散时间系统在单位圆上的z变换即为傅氏变换,即系 统的频率响应特性:
H ej H z z ejω H ejω ejω H ejω ~ ω :幅频特性
输出与输入序列的幅度之比
ω ~ ω :相频特性
limh(t) →∞
t→∞
2.离散系统:
Z平面: 单位圆内:p=-1/3,h(k)=
1 3
k
(k)
→0
单位圆上:p=1,h(k)=1k (k),有限值.
单位圆外:p=2,h(k)= 2 k (k) →∞
z平面
-1/3 0 1 2
极点位置与h(n)形状的关系
信号与系统——系统函数
幅频: | H ( j) | bm B1B2...Bm
A1A2... An
相位:()=(1+…+m)-(1+…+n) 分析: 从0~∞
2019/11/20
22
例: u1(s) + -
R 1/sc
u2(s)
1 sc H(s)=u2(s)/ u1(s) = R 1 sc
11 = Rc s 1 Rc
写出网络转移函数表达式
Hs
V2 s V1 s
1 RC
s
1 1
RC
1 RC
2019/11/20
1 M1 ejθ1
V2 ej ω V1
M1
θ1
1 RC
jω
O
σ
30
频响特性 V2
jω
1 V1
M1
1
2
θ1
1 RC
O
σ
O1 RC
ω
H
Im[z] Z平面
2019/11/20
-1/3
1 2 Re[z]
13
极点位置与h(k)形状的关系
j Im z
1
O
1
Re z
2019/11/20
14
利用z~s平面的映射关系
s平面(单极点)
z平面(单极点)
极点位置 h(t)特点 极点位置 h(k)特点
虚轴上
等幅
单位圆上 等幅
原点时 左半平面
t 1
2019/11/20
28
结论:
凡极点位于左半开平面,零点位于右半开 平面,且所有的零点与极点对于j轴为一 镜像对称的系统函数即为全通函数.
第七章 系统函数

f (t ) et (t )
t
9
H ( s)
(s pi )
i 1
n
H(s)的极点与所对应的响应函数
7.1
系统函数与系统特性
2.离散因果系统 H(z)按其极点在z平面上的位置可分为:在单位圆内、 在单位圆上和在单位圆外三类。 根据z与s的对应关系,有结论: ①H(z)在单位圆内的极点所对应的响应序列为衰减的。 即当k→∞时,响应均趋于0。极点全部在单位圆内的系 统是稳定的系统。
2
7.1
系统函数与系统特性
7.1 系统函数与系统特性 一、系统函数的零、极点分布图
LTI系统的系统函数是复变量s或z的有理分式,即 B() H () A() A(.)=0的根p1,p2,…,pn称为系统函数H(.)的极点; B(.)=0的根1,2,…,m称为系统函数H(.) 的零点。 m
i 1
n
H s
s jω
H jω H jω e
j ω
H jω ——幅频特性
ω ——相频特性(相移特性)
13
H j ω H s
s jω
bm j ω j
m
7.1
系统函数与系统特性
jω p
i 1 i
H (s) 6 6 6 ( s 2)(s 3) s 2 s 2
h(t ) 6(e 2t e 3t ) (t ) g (t ) h( )d [1 e 2t 2e 3t ] (t )
0 t
(2)
Yzs ( s)
1 ( s 1)(s 2)(s 3) Yzs( s) 1 F (s) H ( s) 6( s 1)
系统函数H(s)解读
转移导纳: 转移阻抗:
电压比: 电流比:
3.应用
1)利用拉氏变换求系统的响应
2)由H(s)求h(t),或求系统的零状态响应
【例4-6-1】已知系统 ,激励为 ,求系统的冲激响应 和零状态响应
解:
(1)在零起始状态下,对原方程两端取拉氏变换
则
(2) 或
§4.6.1系统函数H(s)
1.定义
在连续时间系统的傅里叶分析中,已经引入了系统函数的概念
同样,在s域中,单输入单输出情况下,系统的零状态响应
即系统函数就是零状态响应的拉氏变换与激励的拉氏变换之比。
当 时,系统的零状态响应
, ,则
2.H(s)的几种情况
策动点函阻抗:
系统函数(网络函数)H(S)

s 3E s Rzs s 2
s
3s 2
零输入响应为:
rzi (t ) 4 e t 3 e2t
t 0
( t 0)
即零状态响应为:
rzs ( t ) 0.5 e 2 t 2 e t 1.5
稳态响应/暂态响应,自由响应/强迫响应
U C ( s) I L ( s) 1 H 2 (s) 2 X ( s) X ( s)( R2 sL) s 2s 2
例:
I 2 ( s) 求下图所示电路的转移 导纳函数Y21 ( s ) 。 1 V1 ( s )
I 3 s
V1 s
1 s 1 s
1
第 7 页
s 2 2s 1 s2
12 s 2 2s 1 Y21 2 s 5s 2 为矩阵的行列式 , 称为网络的特征方程式 ,
反映了H s 的特性。
§4.7 由系统函数零、极点分布决 定时域特性
一.序言
冲激响应h(t)与系统函数H(s) 从时域和变换域两方 面表征了同一系统的本性。 在s域分析中,借助系统函数在s平面零点与极点 分布的研究,可以简明、直观地给出系统响应的许多 规律。系统的时域、频域特性集中地以其系统函数的 零、极点分布表现出来。 主要优点:
第
10 页
1.可以预言系统的时域特性; 2.便于划分系统的各个分量 (自由/强迫,瞬态/稳态); 3.可以用来说明系统的正弦稳态特性。
第
二.H(s)零、极点与h(t)波形特征的对应
11 页
1.系统函数的零、极点
( s z1 )( s z 2 ) ( s z j ) ( s z m ) A( s ) H ( s) K B( s ) ( s p1 )( s p2 ) ( s pk ) ( s pn )
§6.5系统函数
5 10z 2 9 z 3 5 z 3 10z 2 9 z H ( z) 3 1 2 3 1 4z z z z 4z 2 z 1 例2 已知h(k ) 2cos( k ) (k ), 求系统函数H ( z ). 4 2 2 z ( z cos ) 2 z( z ) 4 2 解: H ( z ) 2 z 2 2 z cos 1 z 2 z 1 4
H (e jT ) T 36
z e j 36
cos36 j sin 36 0.4 cos36 j sin 36 0.3
所以系统正弦稳态响应为
0.81 j 0.59 0.4 1.725 23 0.81 j 0.59 0.3
y(k)=17.25cos(628Tk + 7o)
练习:已知系统模拟框图如右图示,
写出系统函数。
z 1 1 H ( z) 1 1 3z z3
信号与系统 3、系统函数H(z)的应用
1)求系统单位冲激响应 h(k):
2)求系统零 状态响应yf(k):
h(k ) Z 1{H z }
y f (k ) Z 1{H z F ( z)}
其中:Mf , My为有限正数
二、稳定性准则(充要条件)
k
h( k ) M
其中:M为有限正数
即:系统的单位序列响应绝对可和,则系统稳定。 可见,系统稳定性取决于系统本身的结构和参数,是系统自身性质之 一。系统是否稳定与激励信号无关。
信号与系统 三、稳定性判断
系统函数
π
2
2π
(wTs )
§2、系统的稳定性
一、因果性:
定义:系统的零状态,响应y f (.) 不出现在激励f(.)之前的系统。 输入在t=0,或k=0加入,即有当t<0或k<0时f(.)=0. 输出在t<0,或k<0时y f (.) 0 为因果系统,否则为非因果系统。 判别条件: 连续系统,冲激响应h(t)=0,t<0;H(s)的收敛域Re[s]>δ,极点在 右半平面。 离散系统,单位序列响应h(k)=0,k<0;H(z)的收敛域 z p0 , 极点在单位圆内。
系统的零级图如图所示,在z平面上复数矢量表示为: e j pi Ai e j
i
e j j B j e
j
j j
Im[z]
bm1B1B2 ...Bme j (1 ... m ) H (e ) H (e j ) e j ( ) j (1 2 ... n ) A1B2 ...An e
H () B() A()
m
其中
bm ( s i )
j 1
分子B(.)等于零的解 零点 分母A(.)等于零的解 极点
Hale Waihona Puke 零极图B( s) H (s) A( s )
(s p )
i i 1
m
H ( z)
B( z ) A( z )
bm ( z i )
j 1
m
极点 Pi 零点 i
(z p )
i i 1
m
(可为实数也可为复数,B(.) A(.)的系数为史书,极点, 零点为复数必为共轭的)
H (S ) 0 注意:对于H(s) 当n>m时 lim 可认为H(s)在无限远处有零点(n-m)个 s 当n<m时 lim H (S ) 可认为H(s)在无限远处有极点(n-m)个 s 对H(s)相同。 即:系统函数H(.)的零点和极点的数目相同,我们只研究n m的情况。
第7章_系统函数

n
a m ( z p i )
i1
第七章 系统函数
7.1 系统函数与系统特性
一、系统函数的零、极点分布图
极(零)点的分布类型:
✓ 一阶实极(零)点:位于 s 或 z 平面的实轴上
✓ 一阶共轭虚极(零)点:位于 s 或 z 平面虚轴上,且对称于实轴
✓ 一阶共轭复极(零)点:位于 s 或 z 平面上,并且对称于实轴
i 1
H(j
)bmB1B2 amA 1A2
Bej(12 m) m
Aej(12 m) m
H(j) bmB1B2 Bm
其中
amA1A2 Am
() (1 2 m ) - (1 2 m )
据模、辐角随 的变化,可绘出幅频特性曲线和相频特性曲线。
第七章 系统函数
7.1 系统函数与系统特性
7.2 系统的因果性与稳定性
二、系统的稳定性
例 y(k)+1.5y(k-1)-y(k-2)= f(k-1) (1) 若为因果系统,求h(k),并判断是否稳定。 (2) 若为稳定系统,求h(k).
解 H ( z ) 1 1 .5 z z 1 1 z 2 z 2 1 z . 5 z 1 ( z 0 .5 z )z ( 2 ) z 0 .4 0 z . 5 z 0 . 4 2 z
称 B() 0 的根 1,2, n为系统函数 H ( ) 的零点 。
第七章 系统函数
7.1 系统函数与系统特性
一、系统函数的零、极点分布图
系统函数可以写为:
m
H (s) B (s) A(s)
bm
(s j)
j1 n
a m ( s p i )
i1
m
H ( z)
B(z)
第七章 系统函数

第七章系统函数系统分类:连续系统离散系统分析方法:时域:h(t)h(k) 冲击响应/单位响应↑逆↑逆复频域: H(s) H(z) 系统函数H(·)↓s = jw↓z =e jwT频域: H(jw) H(e jwT) 频率响应系统的研究:系统分析: 给定系统→H(·)→系统的特性系统综合: 给定要求(如幅频特性)→确定结构和参数→H(·) 本章是在前几章的基础上加以概括和引伸主要内容:一H(·)与系统的特性(时域响应、频域响应)二系统的因果性和稳定性及判别准则三信号流图四系统模拟。
由系统函数→框图§ 7.1 系统函数与系统特性一 H(·)的零点与极点H(·)=)()(••A B 极点:A(·)=0的根,i P ,H(i P )→∞ 零点:B(·)=0的根,i ξ,H(i ξ)=0类型:实数、共轭虚数、共轭复数,一阶或二阶 二 H(·)与时域的响应关系: H(·) h(·)1 连续系统: H(s) h(t) 以虚轴为界结论:○1 H(s)的极点位置→h(t)的函数形式 ○2 极点在左半开平面→h(t)是衰减的,h(t)|∞→t →0,系统是稳定的○3 虚轴上的一阶极点→h(t)是幅度稳定,临界稳定 ○4 极点在右半开,和虚轴上二阶以上→h(t)是增长的, 系统不稳定稳定性:若输入有界,则输出有界。
若|f(·)|<∞,则| y f (·)|<∞ 2 离散系统:H(z) h(k) 以单位圆为界结论:○1 H(z)的极点位置→h(k)的序列形式 ○2 极点在单位圆内→h(k)是衰减的,k →∞,h(k)→0 系统是稳定的○3 单位圆上的一阶极点→h(k)是幅度稳定,临界稳定 ○4 极点在单位圆外,和单位圆上二阶以上→h(k)是增长的,系统不稳定三 极、零点与频率响应的关系: 1 连续系统H (s)=∏∏=-=-ni i p s mj j s m b 1)(1)(ξ 设极点都在左半开平面,收敛域含虚轴H (j ω)= H (s)|s=jw =∏∏=-=-ni i p jw mj j jw m b 1)(1)(ξ 画幅频、相频特性下面用矢量分析法分析,主要是定性分析其变化规律矢量:p i | p i | j ω |ω| 差矢量: j ω- p i 幅角i ϕ 幅角2π令 j ω- p i =A i ij e θ j ω-ζi =B j jj e ψH (j ω)=)(21)(212121n m j e n A A A j e m B B B m b θθθψψψΛΛΛΛ++++=H (ω)=nA A A mB B B m b ΛΛ2121 )(ωϕ=(m ψψψΛ++21)- (n θθθΛ++21)ω从0~∞时,可得到其幅频特性和相频特性曲线例7.1-1 研究RC 低通网络电压转移函数的频率响应H(j ω)=)(1)(2ωωj U j U解:H (s)=SCR SC 11+=RC S RC 111+• 极点S= - RC 1H (j ω)=RCj RC111+ω令θωj Ae RCj =+1A=2)1(2RC +ω θ=arctg ωcR H (ω)=ARC 11 )(ωϕ=0-θ= - arctg ωcR 定性分析:ω从0~∞时,A 单调增大,θ从0~2π H (ω)单调下降,)(ωϕ从0~ - 2π例7.1-2 典型的二阶系统,RLC 串联电路,求动点导纳y(s)=)(1)(1s U s I 的频率特性 解:H (s) =2022ωα++s s s =)2)(1(p s p s s-- 设α>0,ω02 >α2零点:s=0极点:p 1,2 = -220αωα-±j =-βαj ± 其中:Lr2=α 衰减因素 220αωβ-= LC10=ω 谐振角频率只讨论α<ω0时的频率响应,先画极、零图H (j ω)=)2)(1(p j p j j --ωωω=)(2121θθψ--•j e A A BH (ω) =21A A B)21()(θθψωϕ--= 定性分析:ω从0~∞○1 ω=0 B=0,A 1=A=ω 21θθ-= 2πψ=y (ω)=0 2)(πωϕ=ω↑ B 和A 2↑ A 1↓ 21θθ+↑ 2πψ=y (ω) ↑ )(ωϕ↓○2 ω=ω0 y (ω)=α21为极大值 0)(=ωϕ 221πθθ=+ ω↑ B 、A 2、A 1↑ y (ω) ↓ 21θθ+↑ )(ωϕ↓○3ω→∞ y (ω)→0 πθθ=+21 2)(πωϕ-=全通函数: |H(j ω)|为常数设有二阶系统H(s),左半平面有一对极点p 1,2 = -βαj ± 右半平面有一队零点ξ1,2 =βαj ±H(s)=)2)(1()2)(1(p s p s s s ----ξξH(j ω)=)2)(1()2)(1(p j p j j j ----ωωξωξω=)(21212121θθψψ--+•j e A A B B 由图:对所有ω,有A 1= B 1 A 2 =B 2∴ |H(j ω)|= 2121A A BB =1结论:凡极点位于左半开平面,零点位于右半开平面,且以j ω轴镜像对称,此系统函数即为全通函数 最小相移函数零点位于左半开平面的系统函数,其相频特性)(ωϕ最小 一阶 p 1,2 = βj e ± H(z)=ββj ez z k j e z z k --+-*11 共轭极点 h(k)=2|k 1|cos (βk+θ)·u (k)二阶实或共轭: h(k)= Ck ·u (k) k ↑ h(k)↑ (二阶以上同) h(k)=Ckcos (βk+θ)·u (k) k →∞ h(k)→∞ (3) 极点在单位圆外:|a|>1一阶实极点 p=a ,h(k)=a k ·u (k) k ↑ 一阶共轭极点:p=a βj e ± h(k)=C a k cos (βk+θ)·u (k) h(k)↑ 高阶情况同上结论:A H(z)的零、极点决定 h(k) 形式由极点决定幅度和相角由零、极点共同决定B 单位圆内的极点,h(k)为衰减序列,k →∞ h(k)→0,暂态分量C 单位圆上的一阶极点,h(k)为等幅序列,k →∞ h(k)有限值,稳态分量D 单位圆上的二阶及以上极点 h(k)为等幅序列 单位圆外的极点 k →∞ h(k)→∞ 2 离散系统:H(z)零、极点H(T j e ω)关系H(z)=∏∏=-=-ni i p z mj j z m b 1)(1)(ξ 若极点均为单位圆内,收敛域含单位圆频率响应:H(T j e ω)=∏∏=-=-n i i p j m j j j m b 1)(1)(ωξω=∏∏==n i j e i A mj j e j B m b i j11θψ=)(21)(212121nm j e n A A A j e m B B B m b θθθψψψΛΛΛΛ++++=H d (ω) )(ωϕdj e幅频:H d (ω)= H(T j e ω)=nA A A mB B B m b ΛΛ2121相频:)(ωϕd =(m ψψψΛ++21)- (n θθθΛ++21) 分析:ωT 从0~2π,即ω从0~Tπ2,z 由z=1沿单位圆逆时针方向旋转一周。
§4-5 系统函数

C= 1 4L
V2 (s) = s2 +
s s+
1
=
s s2 + 4s + 4
=
s (s + 2)2
=
(s
A12 + 2)2
+
A11 (s + 2)
RC LC
A12 = (s + 2)2V2 (s) |s=−2 = −2
A11
=
d ds
[(s
+
2)2
V2
(
s)]s
= −2
=1
∴
V2 (s)
=
−2 (s + 2)2
h ( t ) = ℒ -1{ H ( s )}
一般的,系统函数是有理分式,于是
M
∏∏ ∑ h (t )
=ℒ
N (s)
-1{
}
D (s)
=ℒ
A (s − zk )
-1 {
k =1 N
}
(s − pk )
=ℒ
N
-1{
Ak }
k=1 s − pl
N
k =1
∑ = Akepktu(t)
k =1
上式中,zk与pk分别是系统函数零点与极点,零点与极点在s平面上 的位置不同,对单位冲激响应的影响不同。
=
Y(s) X (s)
=
s2
s+3 + 3s +
2
求系统函数的拉氏反变换,即是系统的单位冲激响应。
H(s) =
s2
s+3 + 3s + 2
=
s+3 (s +1)(s + 2)
自动控制原理-系统函数

可见,S平面的左半平面(<0)对应Z平面的圆内(|Z|=<1);在S平面 以虚轴为界,Z平面以|Z|=1的单位圆为界
(1) 0 s j
z e j 1
(2) 0 s j
z 1
(3) 0 z 1
(4) 常数 0
z R1
(5) 常数 0
z r1
j Im[z]
(7) 0, 0
s2 s2
) )
(s (s
s1 )(s s1 )(s
s1* ) s1* )
其频率特性为: H ( j ) ( j s1 )( j s2 ) B1B2 e j( 2 12 ) ( j s1 )( j s2 ) A1 A2
对所有的ω有A1=B1, A2=B2,所以幅频特性 H ( j ) 1
2
(3)因为系统为双边序列,所以收敛域为 1/2<|Z|<3;
所以
h(k) ( 1)k (k) 3k (k 1)
2
问:因果系统的极点在…
二、系统函数与时域响应
• 时域特性能反映响应变化的快慢、上升、下 降时间长短及衰减的程度等。
• 系统的自由响应(P42)的函数(或序列) 形式由A(·)的根确定,亦即由H(·)的极点确 定,而冲击响应或单位序列响应的函数形式 也由H(·)极点确定。
H
(
j)
H (s)
|s
j
(
j
6 2)(
j
3)
6 A1e j1 A2e j2
| H ( jw) | e j
根据上式可分别画出其幅频曲线和相频曲线
j
A2 A1
2
1
-3 -2 -1 0
| H ( j) | 6
| A1A2 |
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(b) 若有一对共轭复极点p1,2= –±jβ,则A(s)中有因子 [(s+)2+β2] → Ke –tcos(βt+θ)ε(t)
(c) 若有r重极点,则A(s)中有因子(s+)r或[(s+)2+β2]r
→ Kit i e–tε(t)或Kit i e–tcos(βt+θ)ε(t) (i=0,1,2,···,r–1)
▲
■
第 7页
结论:
LTI连续因果系统的冲激响应h(t)的函数形式由 H(s)的极点确定。
(1) H(s)在左半平面的极点所对应的响应函数为衰减 的。即:当t→∞时,响应均趋于0。
(2) H(s)在虚轴上的一阶极点所对应的响应函数为稳 态分量。
(3) H(s)在虚轴上的高阶极点或右半平面上的极点, 其所对应的响应函数都是递增的。即:当t→∞时, 响应均趋于∞。
(3)在右半开平面(递增函数) (a) 单极点p=或p1,2=±jβ( >0),相应A(s)中有(s-)或 [(s-)2+β2] → Ketε(t)或Ketcos(βt+θ)ε(t)
(b) r重极点,相应A(s)中有(s-)r或[(s-)2+β2]r
→ Kit ietε(t)或Kit ietcos(βt+θ)ε(t) (i=0,1,2,···,r–1)
H(ejθ)
=
H(z)|z
=
jθ e
式中θ=ωTs,ω为角频率,Ts为取样周期。
▲
■
第 15 页
例:某离散系统的系统函数
H(z) z z z 0.5 z 3
(1) 若系统为因果系统,求单位序列响应h(k); (2) 若系统为反因果系统,求单位序列响应h(k); (3) 若系统存在频率响应,求单位序列响应h(k)。
(3) H(z)在单位圆上的高阶极点或单位圆外的极点, 其所对应的响应序列都是递增的。即:当k→∞时, 响应均趋于∞。
▲
■
第 10 页
▲
■
第 11 页
四、系统函数与频率响应
1. 连续系统
若系统函数H(s)的收敛域包含虚轴(对于因果系 统, H(s)的极点均在左半平面) ,则系统存在频率 响应,频率响应与系统函数之间的关系为
▲
■
第 4页
三、系统函数与时域响应
冲激响应或单位序列响应的函数形式由H(·)的极 点确定。
下面讨论H(·)极点的位置与其对应时域响应的函 数形式。以下所讨论的系统均为因果系统。
▲
■
第 5页
1.连续因果系统
H(s)按其极点在s平面上的位置可分为左半开平面、 虚轴和右半开平面三类。
(1)在左半开平面 (a) 若系统函数有负实单极点p= – ( >0),则A(s)中有因 子(s+),其所对应的响应函数为Ke – tε(t)
第七章 系统函数 §7.1 系统函数与系统特性
系统函数的零、极点分布图 系统函数H(·)与系统的因果性
系统函数与时域响应 系统函数与频率响应
■
第 1页
一、系统函数的零、极点分布图
LTI系统的系统函数是复变量s或z的有理分式,即
H () B() A()
A(·)=0的根p1,p2,···,pn称为系统函数H(·)的极点;
▲
■
第 8页
▲
■
第 9页
2.离散因果系统
H(z)按其极点在z平面上的位置可分为单位圆内、 单位圆上和单位圆外三类。
根据z平面与s平面的映射关系,得出结论:
(1) H(z)在单位圆内的极点所对应的响应序列为衰减 的。即:当k→∞时,响应均趋于0。
(2) H(z)在单位圆上的一阶极点所对应的响应函数为 稳态响应。
jω
解:由分布图可得
j2
H (s) Ks Ks (s 1)2 4 s 2 2s 5
-1 0 σ
-j2
根据初值定理,有
h(0
)
lim
s
sH
(s)
lim
s
s2
Ks2 2s
5
K
H(s、系统函数H(·)与系统的因果性
解: (1) |z|>3,h(k) =[(–0.5)k + 3k](k) (2) |z|<0.5,h(k) =[–(–0.5)k – 3k](–k –1) (3) 0.5<|z|<3,h(k) = (–0.5)k (k) –3k(–k –1)
▲
■
第 16 页
作业
7.6、7.8
因果系统是指系统的零状态响应yzs(·)不会出现于f(·) 之前的系统。
连续因果系统的充分必要条件是: 冲激响应 h(t)=0,t<0 或者,系统函数H(s)的收敛域为 Re[s] >σ0 离散因果系统的充分必要条件是: 单位序列响应 h(k)=0,k<0 或者,系统函数H(z)的收敛域为 |z| >ρ0
(2)最小相移函数
对于具有相同幅频特性的系统函数而言,零点位
于左半开平面的系统函数,其相频特性(ω)最小,
故称为最小相移函数。
▲
■
第 14 页
2. 离散系统
若系统函数H(z)的收敛域包含单位圆(对于因果 系统,H(z)的极点均在单位圆内) ,则系统存在频 率响应,频率响应与系统函数之间的关系为
以上三种情况:当t→∞时,响应均趋于0(暂态分量)。
▲
■
第 6页
(2)在虚轴上
(a) 单极点p=0或p1,2=±jβ,相应A(s)中有s或(s2+β2) → Kε(t)或Kcos(βt +θ)ε(t) —— 稳态分量
(b) r重极点,相应A(s)中有sr或(s2+β2)r → Kit iε(t) 或Kit icos(βt+θ)ε(t) (i=0,1,2,···,r–1) —— 递增函数
B(·)=0的根1,2,···,m称为系统函数H(·)的零点。
将零极点画在复平面上得零、极点分布图。
jω
例1:H (s)
(s
2(s 2) 1)2 (s 2 1)
(2) -2 -1
▲
j
0 -j
■
σ
第 2页
例2:已知H(s)的零、极点分布图如图所示,并且
h(0+)=2。求H(s)的表达式。
H(jω) = H(s)|s = jω
下面介绍两种常见的系统。
▲
■
第 12 页
(1)全通函数
若系统的幅频响应| H(jω)|为常数,则称为全通系 统,其相应的H(s)称为全通函数。
凡极点位于左半开平面,零点位于右半开平面,
并且所有零点与极点对于jω轴为一一镜像对称的系
统函数即为全通函数。
▲
■
第 13 页