基于单片机的自行车里程速度计设计
基于单片机自行车测速仪设计

基于单片机自行车测速仪的设计摘要本设计主要阐述一种基于单片机与霍尔传感器等元件的测速仪设计。
以AT89C51单片机为核心,实现对自行车里程、速度、时间、温度等参数的测量,并能简单的将里程及速度用LCD实时显示。
在本文中详细介绍了测速仪的硬件电路和软件设计。
硬件部分利用霍尔传感器将每秒内的脉冲数传入单片机系统,然后经单片机系统计算处理并将过处理结果送LCD显示。
软件的设计采用模块化结构,使程序的逻辑关系更加简洁。
使硬件在软件的控制下协调运作。
仿真,所设计的硬件电路及软件程序是正确的,实际的硬件电路中也基本上能够满足设计要求。
关键词:里程/速度,时间,温度,霍尔元件,单片机,LCDAbstractThis design mainly elaborated based on MCU and Hall element of speed instrument design. Take STC MCU as the core, Hall element speed, realizes to the bicycle mileage, speed, time, temperature measurement, and a simple bicycle mileage and speed with the LCD real time display. The hardware part using the Hall element will bike per second pulse number of incoming MCU system, and then by the single chip microcomputer system calculation processing and processing result to the LCD display. Program design in order to facilitate the expansion and the change, the software design uses the modular structure, make the logic relations more concise. Make hardware tocoordinatethe operation under the software control. Simulation experiments show that the designed hardware circuit and software program are correct, practical hardware circuit also basically can satisfy the design requirement, but due to the knowledge, in practice there are still some problems in the hardware circuit.Keywords: Mileage / speed,time, temperature, Hall element, MCU,LCD目录错误!未找到引用源。
【设计】毕业论文基于单片机的电子车速里程表的设计

【关键字】设计编号:____________审定成绩:____________毕业设计(论文)设计(论文)题目:基于单片机的电子车速里程表的设计单位(系别):自动化系学生姓名:专业:电气工程及其自动化班级:学号:指导教师:答辩组负责人:填表时间:20 15 年 6 月重庆邮电大学移通学院教务处制重庆邮电大学移通学院毕业设计(论文)任务书设计(论文)题目基于单片机的电子车速里程表的设计学生姓名系别自动化系专业电气工程及其自动化班级七班指导教师职称副教授联系电话备注:此任务书由指导教师填写,并于毕业设计(论文)开始前下达给学生。
摘要自行车自1868年引入我国已有一百多个年头。
随着国内人均GDP的增长,自行车从普通的运输、代步工具发展成为人们休闲娱乐与锻炼的首选。
自行车凭借着高科技带来的高配置和它自身的优势,逐渐的又吸引了大家的眼球。
随着周边环境的破坏污染,自行车必然会有着大好的发展空间。
人们可以通过一些简单的仪器仪表了解实时里程、速度。
可是现在的汽车或者摩托车的仪表片都是机械式的,不方便驾驶员直接捕捉信息。
所以在此次设计中我们将想办法把速度时间等数据通过LED显示出来。
本论文主要阐述一种基于单片机的自行车速度/里程计的设计。
以AT89C51单片机为核心,采用ITR-9707光电传感器测转,A T24C02 实现在系统掉电的时候保存里程信息。
通过频率测量模块和转换模块将数据递给MCS,再通过数据存取模块与LED 模块显示速度和里程。
完成此次的测量显示。
文章详细介绍了自行车速度/里程计的硬件电路和软件设计。
在设计硬件电路的时候,将光电传感器采集的脉冲信号给单片机处理并显示出来。
在此还增加了时间显示功能和超速报警功能。
软件系统设计部分采用C++软件对每一个模块进行编程。
最终达到设计目的。
【关键词】:里程速度光电传感器单片机ABSTRACTBicycle has been introduced to our country more than one hundred years since 1868. As the growth of the domestic per capital the GDP, the bicycle is not only the universal tool of transportation and substitute for walking, but becomes the first choice of entertainment and exercising. Bicycle with high-tech brings high configuration and its own advantages, gradually attracted everybody's eyes again. With the destruction of the surrounding environment, bicycle is bound to have good development space. But now the car or motorcycle instrument are mechanical, the driver could not directly capture information. So we will think of some way to put speed in the design time, such as data displayed by LED.In these paper, the bicycle speed/mileage design based on the Hall element is Single Chip Microcomputer. By AT89C51 as kernel, using ITR-9707 Photoelectric sensor to measure revolution, the measure and statistic are achieved. The range information are saved by AT24C02 when the power is off. The date through frequency measurement module and data conversion module be passed to the MCS, and then the speed and mileage were displayed by access module and LED module. Complete the measurement display.In this article, the hardware circuit and software design of bicycle mileage/speed instrument are introduced in detail. About the hardware, the pulse number is transmitted of one second of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. And an increase of time display and speed alarm. Software system design part adopts C++ software for programming each module. Finally, we can achieve the design purpose.【Key words】: Mileage speed Photoelectric sensor Single Chip Microcomputer目录第四节数据存取模块..................................................................................... - 16 -一、AT24C02简要介绍................................................................................. - 16 -二、工作方式.................................................................................................. - 16 - 第五节显示模块............................................................................................. - 16 -一、外界芯片74LS245/74HC138 ................................................................. - 16 -二、工作原理.................................................................................................. - 17 -第六节超速报警电路模块............................................................................. - 17 - 第七节其他模块............................................................................................. - 17 -一、时钟电路的设计...................................................................................... - 17 -二、工作电源的设计...................................................................................... - 18 -三、开关电路的设计...................................................................................... - 18 - 第四章系统的软件设计..................................................................................... - 19 - 第一节测量算法概述..................................................................................... - 19 - 第二节中断子程序的设计............................................................................. - 19 - 第三节数据处理程序设计............................................................................. - 20 -一、里程计算服务程序.................................................................................. - 20 -二、速度计算服务程序.................................................................................. - 22 - 第四节显示服务程序的设计......................................................................... - 22 - 第五章系统可靠性设计和功能实现................................................................. - 24 - 第一节硬件系统的可靠性设计方法............................................................. - 24 - 第二节软件系统的可靠性设计..................................................................... - 24 - 第三节功能实现............................................................................................. - 26 - 结论..................................................................................................................... - 26 - 致谢..................................................................................................................... - 27 - 参考文献................................................................................................................. - 28 - 附录..................................................................................................................... - 29 -一、英文原文..................................................................................................... - 29 -二、英文翻译..................................................................................................... - 33 -三、电路图......................................................................................................... - 36 -四、PCB图 ........................................................................................................ - 37 -五、源程序.................................................................................错误!未定义书签。
基于单片机的自行车里程表设计
基于单片机的自行车里程表设计一、引言二、系统总体设计方案(一)功能需求分析自行车里程表需要实现以下主要功能:1、准确测量自行车行驶的里程。
2、实时显示里程数据。
3、具备低功耗特性,以保证长时间使用。
(二)系统组成本系统主要由传感器模块、单片机控制模块、显示模块和电源模块组成。
1、传感器模块用于采集车轮转动的信息。
2、单片机控制模块负责对采集到的数据进行处理和计算。
3、显示模块用于向用户展示里程等相关信息。
4、电源模块为整个系统提供稳定的工作电压。
三、硬件设计(一)传感器选择常见的用于测量自行车车轮转动的传感器有霍尔传感器和光电传感器。
霍尔传感器通过感应磁场变化来检测车轮转动,具有精度高、稳定性好的优点;光电传感器则通过检测光的遮挡来判断车轮转动,成本相对较低。
综合考虑,本设计选用霍尔传感器。
(二)单片机选型单片机作为系统的控制核心,需要具备一定的运算能力和接口资源。
考虑到成本和性能要求,选用 STC89C52 单片机。
(三)显示模块为了使里程表的显示清晰直观,选用液晶显示屏(LCD)。
LCD 具有低功耗、显示内容丰富等优点。
(四)电源模块由于自行车在行驶过程中震动较大,选用可充电的锂电池作为电源,并通过稳压芯片将电压稳定在系统所需的工作电压范围内。
四、软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机内部资源的初始化、传感器的初始化和显示模块的初始化。
然后进入主循环,不断采集传感器的数据,并进行计算和处理,将里程数据实时显示在显示屏上。
(二)里程计算算法根据传感器检测到的车轮转动信号,结合车轮的周长,通过累积计算得出行驶里程。
(三)显示程序设计合理的显示界面,将里程数据以清晰易读的方式呈现给用户。
五、系统调试与测试(一)硬件调试在焊接完成后,首先检查电路是否存在短路、断路等问题。
然后使用万用表等工具对各个模块的电源电压、信号电平进行测量,确保硬件工作正常。
(二)软件调试通过单片机的在线调试功能,逐步调试各个功能模块的程序,查看变量的值和程序的执行流程,排除软件中的错误。
基于单片机设计的自行车测速计系统

届.别. 2013届学号毕业设计基于单片机设计的自行车测速系统姓名系别、专业导师姓名、职称完成时间1目录摘要 .............................................................. 3矚慫润厲钐瘗睞枥庑赖。
Abstract............................................................ 3聞創沟燴鐺險爱氇谴净。
1 绪论 ........................................................... 4残骛楼諍锩瀨濟溆塹籟。
1.1 课题背景 ................................................. 5酽锕极額閉镇桧猪訣锥。
1.2 课题主要任务及内容........................................ 5彈贸摄尔霁毙攬砖卤庑。
1.3 任务分析与实现............................................ 5謀荞抟箧飆鐸怼类蒋薔。
2 系统设计 ....................................................... 6厦礴恳蹒骈時盡继價骚。
2.1 硬件方案设计.............................................. 6茕桢广鳓鯡选块网羈泪。
2.2 软件方案设计.............................................. 7鹅娅尽損鹌惨歷茏鴛賴。
2.3 硬件电路设计.............................................. 8籟丛妈羥为贍偾蛏练淨。
2.3.1 概述................................................ 8預頌圣鉉儐歲龈讶骅籴。
基于单片机的多功能自行车里程速度仪设计
毕业设计报告(论文) 基于单片机的多功能自行车里程速度仪设计所属系电子工程系专业自动化学号01212117姓名陆奕喆指导教师辛海燕起讫日期2016.02 ---2016.05设计地点东南大学成贤学院实验大楼502东南大学成贤学院毕业设计报告(论文)诚信承诺本人承诺所呈交的毕业设计报告(论文)及取得的成果是在导师指导下完成,引用他人成果的部分均已列出参考文献。
如论文涉及任何知识产权纠纷,本人将承担一切责任。
学生签名:日期:基于单片机的多功能自行车里程速度仪设计摘要当今社会,能源资源越来越紧缺,全世界,包括中国都在倡导绿色出行,骑车出行越来越成为一种时尚,风格,甚至一种生活态度,随着自行车的不断普及与发展,与之相关的一些配套设备也将蓬勃发展,码表就是其中之一。
一个好的码表集美观、实用、功能多样于一身,码表应该在能够正常稳定的基础上尽可能多的显示骑行者所需信息,方便骑行者调整自身。
本次设计将UBLOX- GPS芯片接收到的信息与霍尔元件接收的脉冲通过单片机处理以后传输到一块LCD12864显示芯片中,从而将定位速度信息显示出来。
本文主要介绍所用芯片的特点,并将这些芯片按照一定方式组合起来,再通过软件的编程使每个芯片发挥应有的作用。
单片机有体积小,能耗低,稳定性好的特点,可以获得理想的效果,从而产生一个优秀的自行车码表。
关键词:UBLOX- GPS;单片机;霍尔元件Design of Multifunctional Bicycle Speedmeter Based on MCUAbstractIn today's society , more and more scarce energy resources leads the world , including China,Advocating green trave . Cycling is becoming more and more fashionable, style, and even a kind of life attitude. With the popularization and development of bicycle, some related equipment will also be developed,which contains Cycle Computers. A good Cycle Computer must Contain beautiful, practical, functional diversity. Cycle Computers should be based on the stability as much as possible, and they also should display the riders the necessary information they need, to make riders adjust themselves simply.This design makes the GPS UBLOX- chip receiving the information and Holzer components receiving the pulse and then transmitted through the MCU to a LCD12864 display chip,which will display the location and speed information.This paper mainly introduces the characteristics of the used chips,and the chips are combined in a certain way. Programming through the software to play the role of each chip.MCU has a small size, low energy consumption, good stability characteristics.We can obtain ideal results,so that a great bike computer is going to be created.Keywords:UBLOX- GPS;MCU;Hall element目录摘要 (I)Abstract (II)第一章绪论 (1)1.1研究背景 (1)1.2国外现状 (1)1.3国内现状 (1)1.4发展前景 (1)1.5 功能介绍 (2)1.6设计内容与预期结果 (2)第二章系统方案设计 (3)2.1系统总体设计 (3)2.2系统设计原则 (3)2.3单片机选择 (3)2.4显示模块的选择 (4)第三章系统硬件电路 (5)3.1 主控模块 (5)3.1.1 STC89C52 (5)3.1.2 STC89C52的主要特点 (5)3.2 时钟电路 (6)3.3 复位电路 (7)3.4 GPS模块 (7)3.5 霍尔测速模块 (8)3.6 LCD 12864显示模块 (9)3.7 接口转换电路 (10)第四章系统软件 (11)4.1主程序 (11)4.2 GPS数据解析程序 (12)4.3霍尔元件处理程序 (12)4.4 LCD 12864显示模块程序 (13)4.5 小结 (13)第五章心得与体会 (15)致谢 (16)参考文献(References) (17)附录:系统总体程序 (18)第一章绪论1.1研究背景随着人们生活水平提高,越来越多的人更加注重生活质量,与世界他国的接触越来越多,文化的交融,政策的变化致使一些曾经不被人们重视的东西也越来越被人重视。
基于单片机设计的自行车测速计系统设计说明

届.别. 2013届学号毕业设计基于单片机设计的自行车测速系统姓名系别、专业导师姓名、职称完成时间word格式.目录摘要 (3)Abstract (4)1 绪论 (5)1.1 课题背景 (5)1.2 课题主要任务及容 (5)1.3 任务分析与实现 (5)2 系统设计 (6)2.1 硬件方案设计 (6)2.2 软件方案设计 (7)2.3 硬件电路设计 (8)2.3.1 概述 (8)2.3.2 系统总电路图 (9)2.3.3 单片机简介 (9)2.3.4 单片机的引脚功能介绍 (10)2.3.5 单片机中断系统介绍 (10)2.3.6 传感器及其测量系统 (11)2.3.7 霍尔传感器的测温原理 (11)2.3.8 集成开关型霍尔传感器 (12)2.4 单片机外围电路的设计 (13)2.4.1 时钟电路的设计 (13)2.4.2 复位电路的设计 (14)2.4.3 显示电路的设计 (15)3 软件程序设计 (16)3.1 概述 (16)3.2 总体程序设计 (16)3.3 中断子程序设计 (18)结论 (19)参考文献 (20)致 (20)附件一:总体原理图设计 (21)摘要随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车的速度里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。
本论文主要阐述一种基于霍尔元件的自行车的速度里程表的设计。
以 STC89C52 单片机为核心,A44E 霍尔传感器测转数,实现对自行车里程/速度的测量统计,并能将自行车的里程数及速度用LED实时显示。
文章详细介绍了自行车的速度里程表的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用汇编语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
基于单片机自行车测速系统设计 (2)
基于单片机自行车测速系统设计摘要随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车的速度里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。
本论文主要阐述一种基于霍尔元件的自行车的速度里程表的设计。
以 AT89C52 单片机为核心,A44E 霍尔传感器测转数,实现对自行车里程/速度的测量统计,采用 24C02 实现在系统掉电的时候保存里程信息,并能将自行车的里程数及速度用LED实时显示。
文章详细介绍了自行车的速度里程表的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用汇编语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
关键词:里程/速度;霍尔元件;单片机;LED显示Bike speed system design based on single chipABSTRACTWith the developing of people’s life, the bicycle is not only th e universal tool of transportation and substitute for walking, but becomes the first choice of entertainment and exercising. The bicycle mileage/speed can fulfill the basic need of people’s life, so that they can learn the speed and the mileage of the bicy cle. In this paper, the bicycle mileage/speed design based on the Hall element is elaborated. By AT89C52 as kernel, using A44E Hall element to measure revolution, the measure and statistic are achieved. The range information is saved by 24C02 when the power is off, the bicycle speed can be displayed on LED. In this article, the hardware circuit and software design of bicycle mileage/speed instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in assemble language; the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meets the demand of design..Keyword:Mileage / speed; Hall element; Single chip microcomputer; LED引言自行车被发明及使用到现在已有两百多年的历史,这两百年间人类在不断的尝试和研发过程中,将玩具式的木马车转换到今日各式新颖休闲运动自行车,自行车发展的目的也从最早的交通代步的工具转换成休闲娱乐运动的用途。
基于AT89S51单片机自行车里程_速度计的设计
第10卷第2期2010年6月南京工业职业技术学院学报Jour nal o fNan ji n g Institute o f I ndustry Techno logyV o.l 10,N o .2J un .,2010收稿日期:2010 04 10作者简介:徐丽萍(1966 ),女,江西广丰人,南京工业职业技术学院高级工程师,副教授,工程硕士,研究方向:电子与通讯。
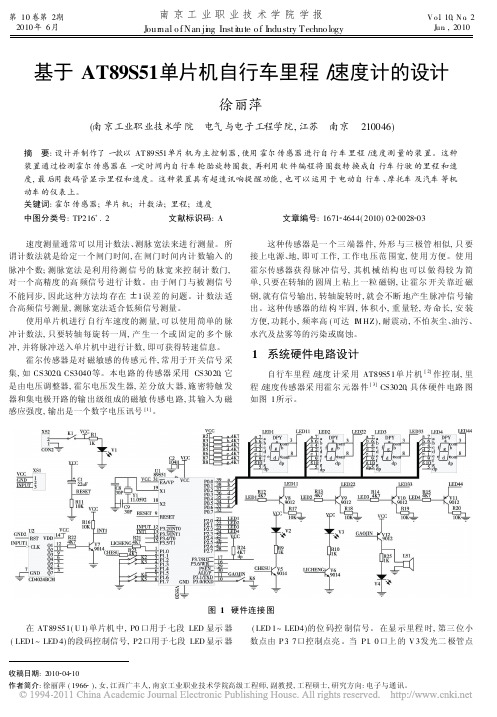
基于AT89S51单片机自行车里程/速度计的设计徐丽萍(南京工业职业技术学院 电气与电子工程学院,江苏 南京 210046)摘 要:设计并制作了一款以AT 89S51单片机为主控制器,使用霍尔传感器进行自行车里程/速度测量的装置。
这种装置通过检测霍尔传感器在一定时间内自行车轮胎旋转圈数,再利用软件编程将圈数转换成自行车行驶的里程和速度,最后用数码管显示里程和速度。
这种装置具有超速讯响提醒功能,也可以运用于电动自行车、摩托车及汽车等机动车的仪表上。
关键词:霍尔传感器;单片机;计数法;里程;速度中图分类号:TP216+.2 文献标识码:A 文章编号:1671 4644(2010)02 0028 03 速度测量通常可以用计数法、测脉宽法来进行测量。
所谓计数法就是给定一个闸门时间,在闸门时间内计数输入的脉冲个数;测脉宽法是利用待测信号的脉宽来控制计数门,对一个高精度的高频信号进行计数。
由于闸门与被测信号不能同步,因此这种方法均存在 1误差的问题。
计数法适合高频信号测量,测脉宽法适合低频信号测量。
使用单片机进行自行车速度的测量,可以使用简单的脉冲计数法,只要转轴每旋转一周,产生一个或固定的多个脉冲,并将脉冲送入单片机中进行计数,即可获得转速信息。
霍尔传感器是对磁敏感的传感元件,常用于开关信号采集,如CS3020、CS3040等。
本电路的传感器采用CS3020,它是由电压调整器,霍尔电压发生器,差分放大器,施密特触发器和集电极开路的输出级组成的磁敏传感电路,其输入为磁感应强度,输出是一个数字电压讯号[1]。
基于单片机的自行车里程速度计设计 精品
基于单片机的自行车里程速度计设计摘要随着自行车行业和电子技术的发展,自行车里程速度计技术也在不断进步和提高,用户对自行车里程速度计的要求也越来越高,因此设计了自行车里程速度计。
本文主要研究了以单片机为基础的自行车里程速度器的设计。
采用STC89C52单片机为主要控制芯片,运用自行车车轮上的传感器进行计数,通过一定时间间隔对信号的采集,结合自行车本身车轮参数,经过单片机对采集信号进行分析计算,最终在液晶显示器LCD 上显示车辆行驶的里程和速度,同时运用其他按键分别自行车单里程计数,瞬时速度、最大速度和平均速度显示,具有超速报警。
该设计重点阐述了系统的工作原理、硬件构成、各部分的主要功能以及软件的结构和实现。
自行车里程速度计的设计本着安全、方便、节能、人性化的原则进行,可使现代生活显著提高。
关键词:自行车,STC89C52, LCD1602IBicycle mileage velocity meter based on MCUABSTRACTAlong with the development of the bicycle industry and electronic technology, bicycle speedometer technology is also in constant progress and improve, user demand for bicycle mileage is more and more is also high, so I chose bicycle mileage speedometer This article mainly introduced take the monolithic integrated circuit as the foundation rental car fare register design. Uses the 89C52 monolithic integrated circuit for the primary control chip, using the pressed key signal imitation rental car wheel counting signal, simultaneously utilizes other pressed keys to control the rental car movement to carry passengers separately/the spatial vehicle condition, the kilometer idea regulation/waiting time and the traveling schedule expense amount to the demonstration. The system used three groups of nixietubes, the utilization dynamic display technology has demonstrated the distance in kilometer, the standby period and the expense separately. Meanwhile carries on the design using the software programming to the monolithic integrated circuit timer, produces the waiting timed pulse signal.this article elaborated with emphasis system's principle of work, the hardware constitution, various part of major functions as well as software's structure and realizes.The mileage log system with STC89C52 as control core, using sensors to detect signals, by a certain time interval signal collection, in combination with itself, bicycle wheel parameters through single chip microcomputer for the analysis of the collected signal, finally displayed on the LCD screen LCD vehicle mileage and speed, overspeed alarm。
基于单片机自行车里程计

基于单片机自行车里程计目录1 概述 (2)2 设计要求 (2)2.1 设计目的 (2)2.2 课题简介 (2)3 总体构思 (2)4 硬件部分介绍 (3)4.1 AT89C51芯片简介 (3)4.2 硬件设计 (4)5 软件部分 (5)5.1 初始化程序 (6)5.2 主程序 (8)5.3 用外部中断0实现的里程计数程序 (9)5.4 里程、速度处理程序 (11)5.5 显示子程序 (14)5.6 延时子程序 (16)6 调试 (16)6.1 硬件调试 (16)6.2 软件调试 (16)7 总结与展望 (18)8 参考文献 (18)9 附录 (18)9.1 电路原理图 (19)9.2 源程序 (20)1 概述自行车被发明及使用到现在已有两百多年的历史,在这两百年间人类在不断的尝试与研发过程中,自行车发展的目的也从最早的代步工具转换成休闲娱乐的用途,随着生活水平的提高,人们希望自行车的功能更强大,而里程计/速度计正满足了这个需求。
现在先进的里程/速度计不仅能显示实时的速度和里程,还显示时间,甚至具有测量骑车人的心跳、显示骑车人热量消耗等功能。
2 设计要求2.1 设计目的本设计采用AT89C51单片机作控制,利用霍尔元件等器件设计一个可用LED数码管显示当前自行车行驶的距离及速度并具有超速报警功能的自行车里程/速度表,使其作为自行车的一种辅助工具,让自行车的功用更强大,给人们带来更多的方便。
2.2 课题简介自行车被发明及使用到现在已有两百多年的历史,在这两百年间人类在不断的尝试与研发过程中,自行车发展的目的也从最早的代步工具转换成休闲娱乐的用途,随着生活水平的提高,人们希望自行车的功能更强大,而里程计/速度计正满足了这个需求。
现在先进的里程/速度计不仅能显示实时的速度和里程,还显示时间,甚至具有测量骑车人的心跳、显示骑车人热量消耗等功能。
由于时间有限,本设计完成的功能减为两个,即测量并通过LED数码管进行动态显示当前的速度和里程,并在超速时发出警报。
基于单片机的自行车速度里程表设计

摘要随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车速度/里程表能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程等物理量。
本论文主要阐述一种基于霍尔元件的自行车速度/里程表的设计。
以AT89S52 单片机为核心,A04E 霍尔传感器测转数,实现对自行车里程/速度的测量统计,并能将自行车的里程数及速度用LED实时显示。
文章详细介绍了自行车速度/里程表的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用C语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
关键词:里程/速度;霍尔元件;单片机;LED显示AbstractWith the developing of people’s life, the bicycle is not only the universal tool of transportation and substitute for walking, but becomes the first choice of entertainmenting and exercising. The bicycle mileage/speed can fulfill the basic need of people’s life, so that they can learn the speed and the mileage of the bicycle. In these paper, the bicycle mileage/speed design based on the Hall element is elaborated. By AT89S52 as kernel, using A04E Hall element to measure revolution, the measure and statistic are achieved. The bicycle speed can be displayed on LED. In this article, the hardware circuit and software design of bicycle mileage/speed instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in C language, the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meet the demand of design.Keywords: Mileage / speed; Hall element; Single Chip Microcomputer; LED目录1 绪论 (1)1.1课题产生的背景 (1)1.2课题的主要任务及内容 (2)2 自行车速度/里程表总体方案设计 (4)2.1 任务分析与实现 (4)2.2 自行车速度/里程表硬件方案设计 (4)2.2.1 里程/速度测量传感器的设计 (5)2.2.2 方案的确定 (7)2.3 自行车速度/里程表软件方案设计 (7)3 自行车速度/里程表硬件电路设计 (9)3.1 概述 (9)3.2 传感器及其测量系统 (9)3.2.1 霍尔传感器的测量原理 (10)3.2.2 集成开关型霍尔传感器 (11)3.3 单片机的原理及应用 (12)3.3.1 单片机原理简介 (12)3.3.2 单片机的引脚功能介绍 (14)3.3.3 单片机中断系统介绍 (17)3.3.4 单片机定时/计数功能介绍 (18)3.4 单片机外围电路的设计 (19)3.4.1 时钟电路的设计 (19)3.4.2 复位电路的设计 (20)3.4.3 显示电路的设计 (21)3.4.4 报警电路的设计 (22)4 自行车速度/里程表软件程序设计 (24)4.1 概述 (24)4.2 自行车速度/里程表总体程序设计 (24)4.3 中断子程序的设计 (25)4.4 数据处理子程序的设计 (26)4.5 显示子程序的设计 (28)5 系统调试与分析 (30)5.1 自行车速度/里程表系统调试 (30)5.1.1 调试系统简介 (30)5.1.2 系统仿真 (30)5.1.3 硬件电路的搭建 (31)5.2 调试故障及原因分析 (31)5.3 调试结果 (32)5.3.1 速度显示 (32)5.3.2 里程显示 (33)5.3.3 超速报警显示 (34)6 社会经济效益分析 (35)结束语 (36)致谢 (37)参考文献 (38)附录Ⅰ自行车速度/里程表硬件系统原理图 (40)附录Ⅱ元件清单 (41)附录Ⅲ程序清单 (42)1 绪论1.1课题产生的背景自行车被发明及使用,到现在已有两百多年的历史,这两百年间,人类在不断的尝试与研发过程中,将玩具式的木马车转换到今日各式新颖休闲运动自行车。
基于单片机自行车里程表的设计
-
1
引言
2
系统设计
3
关键技术点
4
实验结果与讨论
5
结论
1
引言
在当今社会,自行车作 为一种环保、健康的交 通工具,仍然在人们的 生活中占据着重要的地 位
引言
对于骑行者来说,了解 自己的骑行距离和速度 是非常重要的
基于51单片机的自行车 里程表设计,可以实现 对骑行距离和速度的精 确测量和显示,为骑行 者提供实用的骑行数据
按键处理:通过按键设置和 调整里程表的数据
3
关键技术点
关键技术点
码盘的安装与调整
码盘应安装在车轮的中心线上,以保证准确检测车轮的转动。同时,需要注 意调整码盘与单片机的接口,确保信号传输的稳定性
数据处理算法
根据脉冲信号的数量和时间间隔,可以采用不同的数据处理算 法来计算骑行的距离和速度。常用的算法包括中点法和快慢速 处理法。需要根据实际应用场景选择合适的算法
4
实验结果与讨论
实验结果与讨论
1
通过实际测试和实验,基于51单片机的自行车里程表能够实现对骑 行距离和速度的精确测量和显示
实验结果表明,该设计具有较高的稳定性和可靠性,能够满足实际 应用的需求
2
3
然而,在实验过程中也发现了一些问题,如码盘的安装位置和信号 传输的稳定性等,需要在后续的设计中进行改进和完善
LCD显示屏的驱动
LCD显示屏需要使用专用的驱动芯片进行控制。需要注意驱动 芯片与51单片机的接口连接和时序配合,以确保显示数据的正 确性和稳定性
按键的处理
按键需要检测其状态并处理相应的操作。可以采用中断方式或 查询方式进行检测,根据实际需要选择合适的方式
基于单片机控制的电动自行车里程表的毕业设计(含原理图+PCB图+中英文翻译+程序)

电动自行车里程表的设计序言本文介绍里程表设计以单片机和霍尔传感器为核心。
霍尔传感器将到来的低电平脉冲信号输入到单片机进行控制与计算,再采用LED模块进行显示,使得电动自行车的里程数据能直观的显示给使用者。
自行车里程表是用于远距离连续测量自行车行驶距离的仪表。
它分为电源、霍尔传感器和显示器3部分。
目前,里程表普遍使用在汽车和摩扦车上,是一种机械测量装置,测试精度相对低,自行车上使用里程表的还很少见。
针对这种情况,研制新型的数字化里程表用于自行车上是非常必要的。
本文介绍的自行车里程表是由电源稳压系统供电,AT89C52单片机为中央处理器,结合高精度的控制电路,方便地实现了智能化、高精度、高可靠性、高效率的自行车里程表的设计,并且使用方便。
里程表广泛应用于各类机车,包括厂矿企业所使用的电机车和汽车、摩托车等。
传统的机械式里程表虽然稳定可靠,但功能单一,随着电子技术的迅猛发展,电子式里程表得以广泛应用。
一种以单片机为核心的里程表,它不仅可以显示车辆行驶的总里程,也可显示一段时间的阶段里程,并且具有较强的再开发能力。
这一切都是因为利用了单片机系统强大的数据存储和处理控制功能。
里程表以单片机AT89C52为核心,由系统输入、单片机部分和系统输出组成。
第 1 章绪论单片机自从推出以来,以其超小型化、结构紧凑、可靠性高、成本低等优点被人们广泛接受,从而应用于工业、电讯、数据处理、仪器仪表等多方面。
电动自行车里程表是电动自行车的重要配件,在电动自行车仪表中占重要位置,但几十年来其发展变化并不大,现在国外很多车中使用了数字里程表,但在国内还并不多见。
1.1课题背景里程表的原理很简单,因为汽车车轮的直径已知,车轮的圆周长便是恒定不变的。
由此可以计算出每走一里路车轮要转多少圈,这个数也是恒定不变的。
因此只要能够自动把车轮的转数积累下来,然后除以每一里路对应的转数就可以得到行驶的里程了。
这样简单的原理古人就已经发现,并且开始使用了。
基于单片机的自行车速度测试仪设计 2

毕业设计(论文)题目:基于单片机的自行车转速测试仪设计学生:陈丽君指导老师:高海莺系别:电子信息与通信工程系专业:电子信息工程班级:电子1001学号:10300101462014年5月福建工程学院本科毕业论文作者承诺保证书本人郑重承诺:本篇毕业论文的内容真实、可靠。
如果存在弄虚作假、抄袭的情况,本人愿承担全部责任。
学生签名:年月日福建工程学院本科毕业论文指导教师承诺保证书本人郑重承诺:我已按有关规定对本篇毕业论文的选题与内容进行了指导和审核,该同学的毕业论文中未发现弄虚作假、抄袭的现象,本人愿承担指导教师的相关责任。
指导教师签名:年月日目录摘要 (5)Abstract (6)1、绪言 (7)1.1课题背景及意义 (7)1.2课题的主要任务及内容 (7)2、系统方案选择与论证 (8)2.1系统组成 (8)2.2任务分析及实现 (8)2.3模块方案选择与论证 (9)2.3.1物理采集模块 (9)2.3.2液晶显示模块 (10)3、系统硬件设计与实现 (12)3.1转速物理量转换过程 (12)3.2波形的整形 (12)3.3显示模块 (13)3.4核心模块 (14)3.4.1 Pic系列单片机具有以下几个特点 (14)3.4.2 pic16f877a单片机的结构及物理外形 (15)3.4.3 pic16f877a单片机的引脚 (16)3.4.4 数据处理 (18)4、系统软件设计与实现 (19)4.1霍尔元件的流程图 (19)4.2 555芯片的流程图 (19)4.3 LCD软件设计及内部时序 (19)4.4 pic16f877a单片机模块 (21)5.系统仿真与调试 (23)5.1程序编译过程(用maplab软件烧写) (23)5.2 仿真软件proetous使用 (24)结束语 (27)致谢 (28)参考文献 (29)附件1 程序代码 (30)附件2 实物演示 (37)基于单片机的自行车转速测试仪设计摘要在社会的发展、科技的进步、人类文明不断完善的过程中,伴随着环境的污染、食品安全等一系列相关的问题产生。
基于单片机的自行车里程测速仪设计
毕业论文基于单片机的自行车里程测速仪设计院系:信息工程学院姓名:学号:专业:年级:指导教师:职称:完成日期:摘要随着居民生活水平的不断提高,自行车不再仅仅是普通的运输、代步的工具,而是成为人们娱乐、休闲、锻炼的首选。
自行车测速仪能够满足人们最基本的需求,让人们能清楚地知道当前的速度、里程、时间等物理量。
本文介绍了一种基于单片机控制的简易自动自行车速度以及里程计算系统,包括自行车里程表的硬件构成,软件逻辑以及程序代码。
该里程测速系统以AT89C51作为系统控制核心,采用霍尔传感器来检测信号,通过一定时间间隔内对信号的采集,结合自行车本身车轮参数,经过单片机对采集信号进行分析计算,最终在LCD上显示车辆行驶里程、平均速度和瞬时速度,并且具有超速报警功能。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
为了便于扩展和更改,软件的设计采用模块化结构,使程序设计的逻辑关系更加简洁明了,使硬件在软件的控制下协调运作。
正文中首先简单描述系统硬件工作原理,且附以系统硬件设计框图,论述了本次毕业设计所应用的各硬件接口技术和各个接口模块的功能及工作过程, 并具体描述了AT89C51接口的软、硬件调试;其次阐述了程序的流程和实现过程。
仿真实验表明所设计的硬件电路及软件程序是正确的,满足设计要求。
关键词:里程/速度;霍尔元件;单片机;LCDIAbstractWith the development of people’s life, the bicycle is not only the universal tool of transportation and substitute for walking, but becomes the first choice of entertainment and exercising. The bicycle speedometer can fulfill the basic need of people’s life, so that they can learn the speed, the mileage, time of the bicycle.This article describes a simple microcontroller-based control automatically bike speed and mileage calculation system, including bicycle odometer hardware structure, software logic, and program code. Velocity system of the mileage uses AT89C51 as the control core, uses the hall sensors to detect the signal within a certain time interval the signal acquisition, combined with a bicycle wheel parameters after a single-chip signal acquisition, analysis and calculation, the mileage, average speed and instantaneous speed will finally display on the LCD, and the system has speed alarm function. The system hardware circuit is simple, the subroutine is versatile, which fully meets the design requirements.For the sake of easy to expand with the design adoption mold a logic for turning construction, making procedure designing relation that change, software more shorter and more easier to understand. Make hardware control in software descended to moderate the operation. The text inside describes the system hardware work principle in brief first, and attach with the system hardware design frame diagram, discuss this graduate design a function for applied each hardware connecting a people the technique connects with each one a mold piece and work processes, combine to describe in a specific way the AT89C51 electric circuit connects oscular and soft, the hardware adjusts to try. Expatiated the process of the procedure the next in order with realizes process. The simulation results have proved that the hardware circuits design and software program is correct, and the system can meet the designing requirement completely.Keywords: Mileage / speed; Hall element; MCU; LCDII目录1 绪论 (1)1.1 课题研究的目的和意义 (1)1.2 国内外的发展现状分析 (1)1.3 研究的主要内容 (2)2 系统总体设计 (3)2.1 系统总体设计思路 (3)2.2 结构框图 (3)2.3 速度测量原理 (4)2.4 传感器的选择 (4)2.5 显示模块的选择 (4)2.6 操作说明 (5)2.7 工作原理 (5)3 硬件电路设计 (6)3.1 系统总电路图 (6)3.2 AT89C51单片机简介 (7)3.3 1602LCD液晶显示模块 (9)3.4 霍尔元件 (11)3.4.1 霍尔元件简介 (11)3.4.2 霍尔传感器测量原理 (12)3.4.3 转速测量方法 (13)3.5 晶振复位电路 (13)3.6 报警电路 (14)4 软件程序设计 (15)4.1 测量算法概述 (15)4.2 主程序设计 (15)4.3 中断子程序设计 (17)5 调试与仿真 (18)III5.1 Proteus及Keil软件简介 (18)5.1.1 Proteus软件 (18)5.1.2 Keil软件 (18)5.2 应用Keil软件进行程序调试 (19)5.3 Proteus软件仿真 (19)5.4 仿真结果 (19)6 结论 (23)参考文献 (24)致谢 (25)附录 (26)IV绪论1 绪论1.1 课题研究的目的和意义中国人口众多,还是发展中国家,经济不发达制约了大多数人的消费水平,人们使用的交通工具主要还是自行车,它轻巧便捷,使用简单,很受人们的喜爱,同时也可以作为休闲运动工具,是人们锻炼身体的好工具。
自行车行程速度毕业设计
学号:中州大学毕业设计设计题目:基于单片机的自行车里程速度计设计学院:专业:班级:姓名:指导教师:日期:年月日摘要1目前自行车已成为人们娱乐、休闲、锻炼的首选,尤其是对于用来锻炼的人们,自行车速度里程计让他们清楚地知道当前的速度、里程等物理量,更好的用于锻炼。
本论文主要阐述一种基于霍尔元件的自行车速度里程计设计。
以AT89C51 单片机为核心,A44E 霍尔传感器测转数,实现对自行车速度里程计测量统计。
该速度里程计将传感器输入到单片机的脉冲信号的宽度实时地测量出来,然后通过单片机计算出速度和行程,再将所得的数据存储到串口数据存储器,采用CAT24WC32 实现在系统掉电的时候保存速度和行程信息,并由串口液晶显示模块实时显示出所测速度和行程。
本设计介绍了自行车速度/里程测试仪的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用汇编语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
关键词:速度/里程;霍尔元件;单片机;LCD液晶显示Abstract2Now the bicycle has become the first choice of entertainmenting and exercising. Especially for people to exercise,The bicycle speed/trip can fulfill the basic need of people’s life, so that they can learn the speed and the mileage of the bicycle. In these paper, the bicycle speed/trip design based on the Hall element is elaborated. By AT89C51 as kernel, using A44E Hall element to measure revolution, the measure and statistic are achieved. The range informations are saved by CAT24WC32 when the power is off, the bicycle speed can be displayed on LCD. In this article, the hardware circuit and software design of bicycle speed/trip instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in assemble language, the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meet the demand of design.Key words: speed/trip; Hall element; Single Chip Microcomputer; LCD目录一、概述1、设计目的 (1)32、课题简介 (1)二、系统设计1、总体设计方案 (2)2、硬件部分简介 (3)(1)AT89c51芯片简介 (3)(2)硬件设计 (4)3、软件部分 (5)(1)初始化程序 (6)(2)主程序 (8)(3)中断程序 (9)(4)里程、速度处理程序 (11)(5)显示子程序 (14)(6)延时子程序 (16)三、调试 (17)1、硬件调试 (17)2、软件调试 (17)四、操作说明 (19)五、参考文献 (20)六、心得体会 (21)七、附录 (22)1、元器件清单 (22)2、整体原理图 (23)3、完整程序 (24)自行车里程计/速度计的设计一、概述41、设计目的本设计采用AT89C51单片机作控制,利用霍尔元件等器件设计一个可用LED 数码管显示当前自行车行驶的距离及速度并具有超速报警功能的自行车里程/速度表,使其作为自行车的一种辅助工具,让自行车的功用更强大,给人们带来更多的方便。
基于单片机的自行车计速器的设计

• 110•自行车符合现代社会对绿色出行的提倡,越来越多人喜欢骑自行车出门,绿色出行的同时可以锻炼身体,可以达到健康运动和代步的最佳效果,所以才会有越来越多的自行车爱好者出现,它可以让使用者清楚地知道当前的速度,或可以同时附带其他实用的功能,而且单片机体积小、可靠性高并且价格便宜。
在这个背景下,科学、实用并且美观又价格合理的自行车计速器——这一辅助工具迅速发展起来,并有很大的使用价值。
随着电子技术的不断发展进步,传统的计速器从机械元器件组成的机械式到半电子式,再从集成电路式到目前的单片机系统设计的计速器。
并且伴随着单片机以及外围芯片的发展也进一步促进了它的发展。
由此可见,自行车计速器有着广阔的发展前景和很大的市场。
自行车发展至今已经有两百多年历史了,发展至今他从简单的代步工具,有了越来越多的附加功能。
社会经济不断提升,人们生活水平不断提高,现代社会对绿色出行水平的倡议以及全民养生图1 总体设计系统框图2 系统硬件设计2.1 单片机最小系统对于51系列单片机,一个最小系统由单片机、晶振电路和复位电路组成。
如图2所示。
基于单片机的自行车计速器的设计西北民族大学电气工程学院 王子谦图2 单片机最小系统健身意识的觉醒,自行车逐渐成为我们首选的短途代步工具,对于喜欢健身的人来说自行车的计速器就显得尤为重要。
老式传统的测速器由于是机械制造,长期使用会磨损严重,就会造成严重的误差,本次设计的自行车计速器就可以解决这一问题同时满足需求。
1 整体方案设计本设计要实现测速,报警与照明功能,据此功能可分为三个模块:测速模块、显示模块、报警模块、照明模块、外接充电模块。
采用 AT89C52 芯片,利用霍尔传感器将车轮转速转化为电信号,进而将电信号送入单片机内,利用单片机的定时器与计数器得到因车轮转动而引起的脉冲数和车轮转动一圈的时间,计算出自行车行进的速度,最后由单片机送出到外部的 LCD 显示屏上。
时速播报则是利用单片机接收到的信息,经过单片机计算后输出信号到智能语音芯片上进行解析,之后再由小喇叭进行播报,后改为蜂鸣器警报。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
学号:中州大学毕业设计设计题目:基于单片机的自行车里程速度计设计学院:专业:班级:姓名:指导教师:日期:年月日摘要1目前自行车已成为人们娱乐、休闲、锻炼的首选,尤其是对于用来锻炼的人们,自行车速度里程计让他们清楚地知道当前的速度、里程等物理量,更好的用于锻炼。
本论文主要阐述一种基于霍尔元件的自行车速度里程计设计。
以AT89C51 单片机为核心,A44E 霍尔传感器测转数,实现对自行车速度里程计测量统计。
该速度里程计将传感器输入到单片机的脉冲信号的宽度实时地测量出来,然后通过单片机计算出速度和行程,再将所得的数据存储到串口数据存储器,采用CAT24WC32 实现在系统掉电的时候保存速度和行程信息,并由串口液晶显示模块实时显示出所测速度和行程。
本设计介绍了自行车速度/里程测试仪的硬件电路和软件设计。
硬件部分利用霍尔元件将自行车每转一圈的脉冲数传入单片机系统,然后单片机系统将信号经过处理送显示。
软件部分用汇编语言进行编程,采用模块化设计思想。
该系统硬件电路简单,子程序具有通用性,完全符合设计要求。
关键词:速度/里程;霍尔元件;单片机;LCD液晶显示Abstract2Now the bicycle has become the first choice of entertainmenting and exercising. Especially for people to exercise,The bicycle speed/trip can fulfill the basic need of people’s life, so that they can learn the speed and the mileage of the bicycle. In these paper, the bicycle speed/trip design based on the Hall element is elaborated. By AT89C51 as kernel, using A44E Hall element to measure revolution, the measure and statistic are achieved. The range informations are saved by CAT24WC32 when the power is off, the bicycle speed can be displayed on LCD. In this article, the hardware circuit and software design of bicycle speed/trip instrument are introduced in detail. About the hardware, the pulse number is transmitted of one cycle of the bicycle into Single Chip Microcomputer system. Then the signal processed by Single Chip Microcomputer system is sent to display scream. About the software, in assemble language, the program is designed in the mode of modules. The system has simple hardware, common sub-program, and meet the demand of design.Key words: speed/trip; Hall element; Single Chip Microcomputer; LCD目录一、概述1、设计目的 (1)32、课题简介 (1)二、系统设计1、总体设计方案 (2)2、硬件部分简介 (3)(1)AT89c51芯片简介 (3)(2)硬件设计 (4)3、软件部分 (5)(1)初始化程序 (6)(2)主程序 (8)(3)中断程序 (9)(4)里程、速度处理程序 (11)(5)显示子程序 (14)(6)延时子程序 (16)三、调试 (17)1、硬件调试 (17)2、软件调试 (17)四、操作说明 (19)五、参考文献 (20)六、心得体会 (21)七、附录 (22)1、元器件清单 (22)2、整体原理图 (23)3、完整程序 (24)自行车里程计/速度计的设计一、概述41、设计目的本设计采用AT89C51单片机作控制,利用霍尔元件等器件设计一个可用LED 数码管显示当前自行车行驶的距离及速度并具有超速报警功能的自行车里程/速度表,使其作为自行车的一种辅助工具,让自行车的功用更强大,给人们带来更多的方便。
2、课题简介自行车被发明及使用到现在已有两百多年的历史,在这两百年间人类在不断的尝试与研发过程中,自行车发展的目的也从最早的代步工具转换成休闲娱乐的用途,随着生活水平的提高,人们希望自行车的功能更强大,而里程计/速度计正满足了这个需求。
现在先进的里程/速度计不仅能显示实时的速度和里程,还显示时间,甚至具有测量骑车人的心跳、显示骑车人热量消耗等功能。
由于时间有限,本设计完成的功能减为两个,即测量并通过LED数码管进行动态显示当前的速度和里程,并在超速时发出警报。
要求达到的各项指标及实现方法如下:1. 利用霍尔传感器产生里程数的脉冲信号。
2. 对脉冲信号进行计数。
实现:利用单片机自带的计数器T1对霍尔传感器脉冲信号进行计数。
3. 对数据进行处理,要求用LED显示里程总数和即时速度。
实现:利用软件编程,对数据进行处理得到需要的数值。
最终实现目标:自行车的速度里程表具有里程、速度测试与显示功能,采用单片机作控制,显示电路可显示里程及速度。
二、系统设计1、总体设计方案采用AT89C51芯片,用霍尔元件将车轮的转速转换成电脉冲,经过处理后送入单片机。
里程及速度的测量,是经过AT89C51的定时/计数器测出总的脉冲数和每转一圈的时间,再经过单片机的计算得出,计算结果通过LED显示器显示出来。
传感器是获取自然或生产领域中信息的关键器件,是现代信息系统和各种设备不可缺少的信息采集工具。
磁传感器是一种将磁学量信号转变为电信号的器件或装置。
随着信息产业、工业自动化、医疗仪器等的飞速发展和计算机应用的普及,需要大量的传感器将被测或被控的非电信号转换成可与计算机兼容的电信号。
作为输入信号,这就给磁传感器的快速发展提供了机遇,形成了磁传感器的产业。
56其中最具代表的磁传感器就是霍尔传感器,在自动检测系统中,利用霍尔传感器测转数是一种最基本的测量工作。
单片机是本次设计的核心部件,它是信号从采集到输出的桥梁,而且包括计算、定时、信息处理等功能当轮子每转一圈,通过开关型霍尔元件传感器采集到一个脉冲信号,并从引脚12即P3.2外部中断0端输入,传感器每获取一个脉冲信号即对系统提供一次计数中断。
每次中断代表车轮转动一圈,中断数n 轮圈的周长为L 的乘积为里程值。
计数器T1计算每转一圈所用的时间t ,就可以计算出即时速度v 。
当里程键按下时,里程指示灯亮,LED 切换显示当前里程,与当速度键按下时,速度指示灯亮,LED 切换显示当前速度,若自行车超速,系统发出报警信号,指示灯闪烁。
里程数据自动记忆,也可用于电动自行车、摩托车、汽车等机动车仪表上。
设计包括硬件、软件两部分,硬件电路包括AT89C51单片机的外围电路以及LED 显示电路等,这里对硬件部分只做简单介绍,主要阐述的是软件部分的设计,包括数据初始化程序的设计、主程序的设计、处理子程序的设计、显示子程序的设计;最后针对仿真过程遇到的问题进行了具体说明与分析,对本次设计进行总结。
图2.1 系统的原理框图 外部信号霍尔传感 外部存储 AT89C52单片机里程显示速度显示报警部分7 2、 硬件部分介绍(1)AT89C51芯片简介AT89C51是一种带4K 字节闪存可编程可擦除的只读存储器即为 (FPEROM —Flash Programmable and Erasable Read Only Memory )的低电压、高性能CMOS 8位微处理器,俗称单片机。
图2-2 单片机内部机构示意图管脚说明:VCC :供电电压。
GND :接地。
P0口:P0口为一个8位漏级开路双向I/O 口,每脚可吸收8TTL 门电流。
当P1口的管脚第一次写1时,被定义为高阻输入。
P0能够用于外部程序数据存储器,它可以被定义为数据/地址的第八位。
在FIASH 编程时,P0 口作为原码输入口,当FIASH 进行校验时,P0输出原码,此时P0外部必须被拉高。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O 口,P1口缓冲器能接收输出4TTL 门电流。
P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。
在FLASH 编程和校验时,P1口作为第八位地址接收。
P2口:P2口为一个内部上拉电阻的8位双向I/O 口,P2口缓冲器可接收,输出4个TTL 门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。
并因此作为输入时,P2口的管脚被外部拉低,将输出电流。
这是由于内部上拉的缘故。
P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。
在给出地址“1”定时/计数器 中断系统CPU 存储器 并行I/O 口 串口I/O 口TXDRXDT INTP0-P3时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。
P2口在FLASH编程和校验时接收高八位地址信号和控制信号。
P3口:P3口管脚是8个带内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。
当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。
作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这是由于上拉的缘故。
P3口也可作为AT89C51的一些特殊功能口,如下表所示:口管脚备选功能P3.0 RXD(串行输入口)P3.1 TXD(串行输出口)P3.2 /INT0(外部中断0)P3.3 /INT1(外部中断1)P3.4 T0(记时器0外部输入)P3.5 T1(记时器1外部输入)P3.6 /WR(外部数据存储器写选通)P3.7 /RD(外部数据存储器读选通)P3口同时为闪烁编程和编程校验接收一些控制信号。
RST:复位输入。
当振荡器复位器件时,要保持RST脚两个机器周期的高电平时间。
ALE/PROG:当访问外部存储器时,地址锁存允许的输出电平用于锁存地址的地位字节。