安川机器人各个系列详细资料
安川机器人DX200培训教材

目录•机器人基础知识•DX200机器人概述•DX200机器人基本操作•DX200机器人编程与调试•DX200机器人维护与保养•DX200机器人应用案例机器人基础知识机器人的分类根据机器人的应用领域和智能水平,可以将其分为工业机器人、服务机器人、特种机器人等。
机器人的定义机器人是一种能够自动执行任务的机器系统。
它可以接受人类指挥,也可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人的定义与分类机器人的发展历程第一代机器人示教再现型机器人,主要由机器手控制器和示教盒组成,可按预先引导动作记录下信息重复再现执行。
第二代机器人感觉型机器人,如具有视觉、触觉、听觉等外部传感器,能实际检测工作环境变化给机器人提供的信息,如工件和移动物体的大小、距离、方向和速度;零件的倾斜和移动;分力的变化等,机器人能控制自身动作以适应外界的变化。
第三代机器人智能型机器人,具有多种感知功能,可进行复杂的逻辑思维、判断和决策,在作业环境中独立行动,与第五代计算机关系密切。
工业制造领域机器人在工业制造领域的应用非常广泛,如焊接、装配、喷涂、搬运等。
它们可以提高生产效率、降低生产成本、提高产品质量等。
军事领域机器人在军事领域的应用也逐渐增多,如无人侦察机、无人战斗机、排雷机器人等。
它们可以执行高风险的任务、提高作战效率、减少人员伤亡等。
服务领域随着人工智能技术的发展,服务机器人也逐渐走进人们的生活,如智能家居机器人、餐厅服务机器人、酒店服务机器人等。
它们可以提供便捷的生活服务、提高生活质量等。
医疗服务领域机器人在医疗服务领域的应用也越来越多,如手术机器人、康复机器人、护理机器人等。
它们可以协助医生进行手术操作、帮助患者进行康复训练、提供日常的护理服务等。
机器人的应用领域DX200机器人概述高速度、高精度紧凑、轻量化设计结构紧凑、重量轻,方便安装和集成到各种自动化设备中。
丰富的功能配置支持多种通讯协议和扩展模块,可实现复杂的自动化任务。
安川工业机器人从入门到精通

03
基础知工业机器人定义和分类
明确工业机器人的概念,了解不同类 型的工业机器人及其应用领域。
传感器与感知系统
阐述工业机器人常用的传感器类型, 如位置传感器、力传感器等,以及感 知系统的基本原理和功能。
机械结构
详细介绍工业机器人的机械结构,包 括关节、连杆、驱动装置等部件的作 用和设计原理。
THANKS
感谢观看
1 2 3
协作机器人市场潜力巨大
协作机器人具有安全、易用、灵活等特点,未来 在5G、物联网等技术的推动下,协作机器人市 场将迎来更大发展空间。
智能化水平不断提升
随着人工智能技术的深入应用,工业机器人的智 能化水平将不断提升,实现更高级别的自动化和 智能化生产。
应用领域不断拓展
工业机器人将逐渐拓展至医疗、物流、农业等非 工业领域,为这些行业带来革命性的变革。
生产线现状
原有生产线以人工操作为主,设备陈旧,无法满足市场日益增长的 需求。
引入安川工业机器人的目的
提高生产效率、降低人力成本、提升产品质量。
生产线自动化改造方案设计
01
02
03
04
机器人选型
根据生产线工艺流程和负载要 求,选用安川Motoman系列
工业机器人。
布局规划
重新规划生产线布局,设置机 器人工作站,实现自动化上下
02
安川工业机器人简介
公司背景及发展历程
01
02
03
04
1915年,安川电机成立,初 期以生产马达为主。
1977年,安川电机开始研发 工业机器人,并推出首款 MOTOMAN机器人。
1980年代,安川电机工业机 器人进入快速发展期,广泛应 用于汽车、电子、机械等领域
安川焊接机器人说明书

在机器人运行过程中,保持警 惕,注意观察设备运行状态, 及时发现并处理问题。
应急处理预案制定
制定机器人故障应急 处理预案,明确故障 类型、处理措施和责 任人。
定期检查应急处理预 案的可行性和有效性 ,及时更新和完善预 案内容。
对操作人员进行应急 处理培训,提高他们 应对突发情况的能力 。
感谢您的观看
05
设备维护与保养
日常维护项目清单
清洁机器人表面
使用干布擦拭机器人表面,确 保无灰尘、油污等杂质。
检查电缆和连接器
检查所有电缆和连接器是否松 动或损坏,确保连接可靠。
检查焊接设备
检查焊枪、导电嘴等易损件, 如有磨损或损坏应及时更换。
润滑关节和轴承
按照使用说明书要求,定期为 机器人的关节和轴承添加润滑
伺服电机
驱动机器人各关节运动 ,实现精确的位置和速
度控制。
减速器
降低电机输出速度,增 加输出扭矩,提高机器
人动作精度。
控制器
接收外部指令,解析并 控制伺服电机运动,实
现机器人动作。
传感器
监测机器人状态和环境 信息,为控制器提供反
馈信号。
辅助设备及配件
01
02
03
04
示教器
用于手动操作机器人,进行示 教编程和调试。
06
安全注意事项及操作规范
安全防护措施建议
在机器人工作区域设置安全围 栏,确保人员不会误入危险区
域。
在机器人上安装急停按钮, 以便在紧急情况下迅速切断
电源。
定期对机器人进行安全检查和 维护,确保设备处于良好状态
。
操作规范要点提示
在操作机器人前,务必熟悉设 备的各项功能和操作流程。
(日)安川手册-安川机器人选型手册(全)
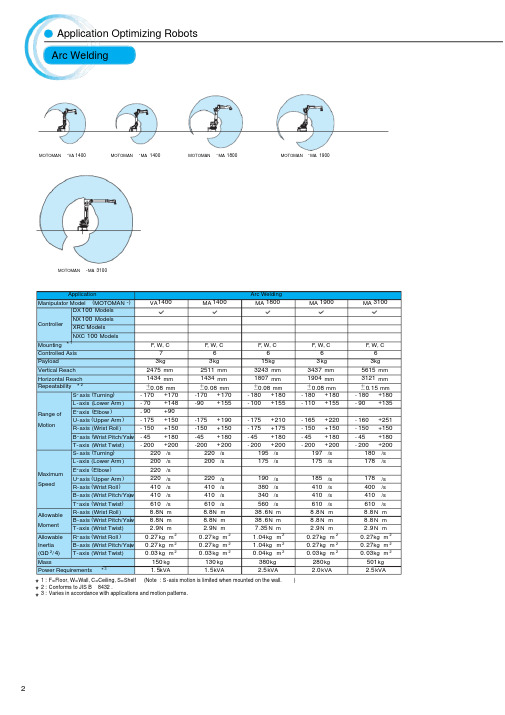
*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S-axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.ApplicationArc Welding Manipulator Model (MOTOMAN -)VA 1400MA 1400MA 1800MA 1900MA 3100ControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 Models Mounting *1F , W, C F , W, C F , W, C F , W, C F , W, CControlled Axis 76666Payload3kg3kg 15kg 3kg 3kg Vertical Reach 2475 mm2511 mm 3243 mm 3437 mm 5615 mm Horizontal Reach1434 mm 1434 mm 1807 mm 1904 mm 3121 mm Repeatability *2±0.08 mm±0.08 mm±0.08 mm±0.08 mm±0.15 mmRange ofMotion S -axis (Turning ) -170+170-170+170-180+180-180+180-180+180L -axis (Lower Arm ) -70+148-90+155-100+155-110+155-90+135E -axis (Elbow ) -90+90U -axis (Upper Arm ) -175+150-175+190-175+210-165+220-160+251R -axis (Wrist Roll ) -150+150-150+150-175+175-150+150-150+150B -axis (Wrist Pitch/Yaw) -45+180-45+180-45+180-45+180-45+180T -axis (Wrist Twist ) -200+200-200+200-200+200-200+200-200+200MaximumSpeedS -axis (Turning )220/s 220/s 195/s 197/s 180/s L -axis (Lower Arm )200/s 200/s 175/s 175/s 178/s E -axis (Elbow )220/sU -axis (Upper Arm )220/s 220/s 190/s 185/s 178/s R -axis (Wrist Roll )410/s410/s 380/s 410/s 400/s B -axis (Wrist Pitch/Yaw )410/s410/s 340/s 410/s 410/s T -axis (Wrist Twist )610/s 610/s 560/s 610/s 610/s Allowable MomentR -axis (Wrist Roll)8.8N m8.8N m 38.6N m 8.8N m 8.8N m B -axis (Wrist Pitch/Yaw )8.8N m8.8N m 38.6N m 8.8N m 8.8N m T -axis (Wrist Twist )2.9N m2.9N m 7.35N m 2.9N m 2.9N m Allowable R -axis (Wrist Roll )0.27kg m 20.27kg m 21.04kg m 20.27kg m 20.27kg m 2Inertia B -axis (Wrist Pitch/Yaw)0.27kg m 20.27kg m 21.04kg m 20.27kg m 20.27kg m 2(GD 2/4)T -axis (Wrist Twist )0.03kg m 20.03kg m 20.04kg m 20.03kg m 20.03kg m 2Mass 150kg130kg 380kg 280kg 501kg Power Requirements *31.5kVA1.5kVA2.5kVA2.0kVA2.5kVAApplication Optimizing Robots Arc WeldingMOTOMAN-VA 1400MOTOMAN -MA 3100MOTOMAN-MA 1400MOTOMAN-MA 1800MOTOMAN-MA 1900*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4: When not used with an external cable.ApplicationSpot Welding Manipulator Model (MOTOMAN -)VS 50MS 80MS 120ES 165D ES 165RDES 200D ES 200RD ES 280DControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F F F F S F S FControlled Axis 76666666Payload50kg80kg *4120kg 165kg *4165kg *4200kg *4200kg *4280kg Vertical Reach 2597 mm 3397 mm 2163 mm 3372 mm 4782 mm 3372 mm 4782 mm 3022 mm Horizontal Reach 1630 mm 2061 mm 1623 mm 2651 mm 3140 mm 2651 mm 3140 mm 2446 mmRepeatability *2±0.1 mm±0.07 mm ±0.2 mm ±0.2 mm±0.2 mm 0.2 mm±0.2 mm ±0.2 mm Range ofMotionS -axis (Turning )-180+180-180+180-150+150 -180+180-180+180-180+180-180+180-180+180L -axis (Lower Arm )-60+125-60+120-60+50-60+76-130+80-60+76-130+80-60+76E -axis (Elbow )-170+170U -axis (Upper Arm )-35+215-170+90-105+72 -142.5+230-112+208-142.5+230-107+208-142.5+230R -axis (Wrist Roll )-170+170-360+360*4-360+360-360+360*4-360+360*4 -360+360*4-360+360*4-360+360B -axis (Wrist Pitch/Yaw)-125+125-125+125*4-130+130-130+130*4-130+130*4 -125+125*4-125+125*4-125+125T -axis (Wrist Twist )-180+180-360+360*4-360+360-360+360*4-360+360*4-360+360*4-360+360*4-360+360MaximumSpeedS -axis (Turning )170/s 170/s 130/s 110/s 105/s 95/s 90/s *490/s L -axis (Lower Arm )130/s 140/s110/s 110/s105/s 90/s85/s *480/sE -axis (Elbow )130/sU -axis (Upper Arm )130/s 160/s 130/s 110/s105/s 95/s 85/s *490/s R -axis (Wrist Roll )130/s230/s 215/s 175/s 175/s 120/s 120/s 115/s B -axis (Wrist Pitch/Yaw )130/s230/s 180/s 150/s 150/s 120/s 120/s 110/s T -axis (Wrist Twist )200/s 350/s 300/s 240/s 240/s 190/s 190/s 190/s AllowableMomentR -axis (Wrist Roll )377N m392N m *4588N m 921N m *4921N m *41344N m *41344N m *41333N m B -axis (Wrist Pitch/Yaw )377N m392N m *4588N m 921N m *4921N m *41344N m *41344N m *41333N m T -axis (Wrist Twist )147N m196N m *4392N m 490N m 490N m 715N m 715N m 706N m A ll owab le R -axis (Wrist Roll )29.6kg m 228kg m 2*435kg m 285kg m 2*485kg m 2*4143kg m 2*4143kg m 2*4142kg m 2Inertia B -axis (Wrist Pitch/Yaw)29.6kg m 228kg m 2*435kg m 285kg m 2*485kg m 2*4143kg m 2*4143kg m 2*4142kg m 2(GD 2/4)T -axis (Wrist Twist )12.5kg m 211kg m 2*414.5kg m 245kg m 245kg m 280kg m 280kg m 279kg m 2Mass640kg 550kg 950kg 1100kg 1540kg 1130kg 1570kg 1120kg Power Requirements *35.0kVA 4.0kVA 4.5kVA 5.0kVA5.0kVA5.0kVA 5.0kVA 10kVAMOTOMAN -VS 50MOTOMAN -MS 80MOTOMAN -MS 120MOTOMAN -ES 165DMOTOMAN-ES 200DMOTOMAN-ES 200RDMOTOMAN-ES 280DMOTOMAN-ES 165RDApplication Optimizing Robots Spot WeldingApplicationMaterial Handling(General purpose)Manipulator Model (MOTOMAN -)HP 3JMH 5MH 5LMH 6MH 6SHP 20DHP 20D -6MH 50MH 50-20ControllerDX 100 ModelsNX 100 Models XRC Models NXC 100 Models*4*4Mounting *1F, W, CF , W, CF , W, CF , W, CF , W, CF, W, CF, W, CF , W, CF , W, CControlled Axis 666666666Payload 3kg 5kg 5kg 6kg 6kg 20kg 6kg 50kg 20kg Vertical Reach 804 mm 1193 mm 1560 mm 2486 mm 1597 mm 3063 mm 3459 mm 3578 mm 5585 mm Horizontal Reach 532 mm706 mm895 mm1422 mm997 mm1717 mm1915 mm2061 mm3106 mmRepeatability *2±0.03 mm ±0.02 mm ±0.03 mm ±0.08 mm ±0.08 mm ±0.06 mm ±0.06 mm ±0.07 mm ±0.15 mmRange of MotionS -axis (Turning )-160+160 -170+170 -170+170 -170+170 -170+170 -180+180 -180+180 -180+180 -180+180L -axis (Lower Arm) -85+90-65+150-65+150 -90+155 -80+133-110+155 -110+155-90+135 -90+135U -axis (Upper Arm) -105+260 -136+255 -138+255 -175+250 -130+165 -165+255 -160+255 -170+251 -160+251R -axis (Wrist Roll ) -170+170 -190+190 -190+190 -180+180 -180+180 -200+200 -200+200 -360+360 -190+190B -axis (Wrist Pitch/Yaw ) -120+120 -125+125 -125+125 -45+225 -45+225-50+230-50+230 -125+125-50+230T -axis (Wrist Twist) -360+360 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360Maximum SpeedS -axis (Turning )200/s 376/s 270/s 220/s 220/s 197/s 197/s 180/s 180/s L -axis (Lower Arm )150/s350/s 280/s 200/s 220/s 175/s 175/s 178/s 178/s U -axis (Upper Arm )190/s 400/s 300/s 220/s 220/s 187/s 187/s 178/s 178/s R -axis (Wrist Roll )300/s 450/s 450/s 410/s 410/s 400/s 400/s 250/s 400/s B -axis (Wrist Pitch/Yaw )300/s 450/s 450/s 410/s 410/s 400/s 400/s 250/s 400/s T -axis (Wrist Twist)420/s 720/s 720/s 610/s 610/s 600/s 600/s 360/s 600/s Allowable Moment R -axis (Wrist Roll )5.39N m 12N m 12N m 11.8N m 11.8N m 39.2N m 11.8N m 216N m 39.2N m B -axis (Wrist Pitch/Yaw)5.39N m 12N m 12N m 9.8N m 9.8N m 39.2N m 9.8N m 216N m 39.2N m T -axis (Wrist Twist )2.94N m 7N m7N m5.9N m5.9N m19.6N m5.9N m147N m 19.6N m Allowable Inertia (GD 2/4)R -axis (Wrist Roll )0.1kg m 20.30kg m 20.30kg m 20.27kg m 20.27kg m 21.05kg m 20.24kg m 228kg m 21.05kg m 2B -axis (Wrist Pitch/Yaw)0.1kg m 20.30kg m 20.30kg m 20.27kg m 20.27kg m 21.05kg m 20.17kg m 228kg m 21.05kg m 2T -axis (Wrist Twist)0.03kg m 20.1kg m 20.1kg m 20.06kg m 20.06kg m 20.75kg m 20.06kg m 211kg m 20.75kg m 2Mass27kg28kg 30kg 130kg 120kg 268kg 273kg 550kg 495kg Power Requirements*30.5kVA1.0kVA1.0kVA1.5kVA1.5kVA2.0kVA2.0kVA4.0kVA3.5kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S-axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4: Only for handling.HandlingApplication Optimizing Robots MOTOMAN -HP 3J MOTOMAN-HP 20DMOTOMAN-HP 20D -6MOTOMAN-MH 50MOTOMAN-MH 50-20MOTOMAN-MH 5MOTOMAN-MH 5LMOTOMAN-MH 6MOTOMAN-MH 6SApplicationMaterial Handling(General purpose)Manipulator Model (MOTOMAN -)MH 80MH 165MH 200MH 215MH 250UP 350DUP 400RDUP 350D -500UP 350D -600ControllerDX 100 ModelsNX 100 Models XRC Models NXC 100 ModelsMounting *1F F F F F F S F FControlled Axis 666666666Payload 80kg 165kg *4200kg *4215kg 250kg 350kg 400kg 500kg 600kg Vertical Reach 3578 mm 3372 mm 3372 mm 3894 mm 3490 mm 2761 mm 4908 mm 2761 mm 2761 mm Horizontal Reach 2061 mm2651 mm2651 mm2912 mm2710 mm2542 mm3518 mm2542 mm2542 mmRepeatability *2±0.07 mm ±0.2 mm 0.2 mm ±0.2 mm 0.2 mm ±0.5 mm ±0.5 mm ±0.5 mm ±0.5 mmRange of Motion S -axis (Turning )-180+180 -180+180-180+180 -180+180 -180+180 -150+150 -150+150 -150+150 -150+150L -axis (Lower Arm)-90+135-60+76-60+76-60+76-60+76-55+61-122+20-55+61-55+61U -axis (Upper Arm ) -170+251 -142.5+230 -142.5+230 -142.5+230 -142.5+230-113+30-9+120-113+30-113+30R -axis (Wrist Roll ) -360+360 -360+360*4 -360+360*4 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360B -axis (Wrist Pitch/Yaw ) -125+125 -130+130*4 -125+125*4 -125+125 -125+125 -125+125 -120+120 -125+125 -125+125T -axis (Wrist Twist ) -360+360 -360+360*4 -360+360*4 -360+360 -360+360 -360+360 -360+360 -360+360 -360+360Maximum SpeedS -axis (Turning )170/s 110/s 95/s 100/s 100/s 95/s 80/s 80/s 60/s L -axis (Lower Arm)140/s 110/s 90/s 90/s 90/s 95/s 80/s 80/s 70/s U -axis (Upper Arm )160/s 110/s 95/s 97/s 97/s 95/s 80/s 80/s 70/s R -axis (Wrist Roll )230/s 175/s 120/s 120/s 120/s 100/s 80/s 100/s 80/s B -axis (Wrist Pitch/Yaw )230/s 150/s120/s 120/s 120/s 100/s 80/s 100/s 80/s T -axis (Wrist Twist)350/s 240/s190/s190/s190/s 160/s 160/s 160/s 160/s Allowable Moment R -axis (Wrist Roll )392N m 921N m *41344N m *41176N m 1385N m 1960N m 1960N m 1960N m 2450N m B -axis (Wrist Pitch/Yaw)392N m 921N m *41344N m *41176N m 1385N m 1960N m 1960N m 1960N m 2450N m T -axis (Wrist Twist )196N m 490N m 715N m 710N m735N m 823N m 833N m 823N m 823N m Allowable Inertia (GD 2/4)R -axis (Wrist Roll )28kg m 285kg m 2*4143kg m 2*4317kg m 2317kg m 2150kg m 2150kg m 2150kg m 2200kg m 2B -axis (Wrist Pitch/Yaw)28kg m 285kg m 2*4143kg m 2*4317kg m 2317kg m 2150kg m 2150kg m 2150kg m 2200kg m 2T -axis (Wrist Twist)11kg m 245kg m 280kg m 2200kg m 2200kg m 290kg m 250kg m 290kg m 290kg m 2Mass555kg 1100kg 1130kg 1140kg 1130kg 2200kg 3600kg 2350kg 2400kg Power Requirements *34.5kVA5.0kVA5.0kVA6.0kVA6.0kVA5.5kVA12kVA5.5kVA7.0kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S-axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4: When not used with an external cable.MOTOMAN-MH 80MOTOMAN -MH 250MOTOMAN -UP 350D MOTOMAN -UP 400RDMOTOMAN -UP 350D -500MOTOMAN -UP 350D -600MOTOMAN-MH 165MOTOMAN-MH 200MOTOMAN-MH 215ApplicationPicking / Packing PalletizingManipulator Model(MOTOMAN -)MPK 2MPK 50MPL 80MPL 100MPL 160MPL 300MPL 500MPL 800ControllerDX 100 Models NX 100 ModelsXRC Models NXC 100 ModelsMounting *1F ,W,C F F F F F F FControlled Axis 54544444Payload2kg50kg 80kg 100kg 160kg 300kg 500kg 800kg Vertical Reach 1625 mm 1668 mm 3291 mm 3024 mm 3024 mm 3024 mm 3024 mm 3024 mm Horizontal Reach900 mm1893 mm 2061 mm 3159 mm 3159 mm 3159 mm 3159 mm 3159 mm Repeatability *2±0.5 mm±0.5 mm ±0.07 mm ±0.5 mm ±0.5 mm ±0.5 mm ±0.5 mm ±0.5 mm Range of MotionS -axis (Turning )-170+170-180+180-180+180-180+180 -180+180 -180+180 -180+180 -180+180L -axis (Lower Arm)-120+120-35+80-90+135-45+90-45+90-45+90-45+90-45+90U -axis (Upper Arm)-102+282-105+15-160+35-120+15.5-120+15.5-120+15.5-120+15.5-120+15.5R -axis (Wrist Roll )B -axis (Wrist Pitch/Yaw)-150+150 -15+15T -axis (Wrist Twist)-270+270 -350+350- 360+360-360+360 -360+360-360+360-360+360-360+360Maximum SpeedS -axis (Turning )320/s185/s 170/s 140/s 140/s 90/s85/s 65/s L -axis (Lower Arm )330/s215/s 170/s 140/s 140/s 100/s 85/s 65/s U -axis (Upper Arm )330/s215/s 170/s140/s 140/s110/s 85/s 65/sR -axis (Wrist Roll )B -axis (Wrist Pitch/Yaw )380/s 170/s T -axis (Wrist Twist )2000/s374/s350/s 305/s 305/s 195/s 195/s 125/sAllowableMoment R -axis (Wrist Roll )B -axis (Wrist Pitch/Yaw)3.5N m 78.4N m T -axis (Wrist Twist )1.5N m 20.5N m Allowable R -axis (Wrist Roll )Inertia B -axis (Wrist Pitch/Yaw)0.065kg m 216kg m 2(GD 2/4)T -axis (Wrist Twist)0.012kg m 25.5kg m 26.1kg m 280kg m 280kg m 2140kg m 2200kg m 2550kg m 2Mass75kg 670kg 550kg 1700kg 1700kg 1820kg 2300kg 2550kg Power Requirements *31.5kVA4.0kVA 4.0kVA9.5kVA9.5kVA 9.5kVA 9.5kVA 10kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.Picking / PackingPalletizingApplication Optimizing Robots MOTOMAN -MPK 2MOTOMAN -MPK 50MOTOMAN-MPL 80MOTOMAN -MPL 160MOTOMAN -MPL 300MOTOMAN -MPL 500MOTOMAN -MPL 800MOTOMAN-MPL 100ApplicationAssembly & Distributing Manipulator Model(MOTOMAN -)SIA 5D SIA 10D SIA 20DSIA 30D SIA 50DSDA 5D SDA 10D SDA 20DControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F , W, C F, W, C F , W, C F F F , C F FDegrees of Freedom 77777151515Payload5kg 10kg 20kg 30kg 50kg 5kg/Arm 10kg/Arm 20kg/Arm Vertical Reach 1007 mm 1203 mm 1498 mm 2597 mm 2597 mm 1118 mm 1440 mm 1820 mm Horizontal Reach 559 mm 720 mm 910 mm 1485 mm 1630 mm 1604 mm 1970 mm 2590 mm Ripeatability*2±0.06 mm±0.1 mm±0.1 mm±0.1 mm±0.1 mm±0.06 mm ±0.1 mm ±0.1 mm Range of MotionRotation-170+170 -170+170 -180+180S -axis (Turning ) -180+180 -180+180-180+180 -180+180 -180+180 -90+270, -270+90 -180+180 -180+180L -axis (Lower Arm) -110+110 -110+110 -110+110 -125+125 -60+125 -110+110 -110+110 -110+110E -axis (Elbow ) -170+170 -170+170 -170+170 -170+170 -170+170 -170+170-170+170 -170+170U -axis (Upper Arm ) -90+115 -135+135 -130+130 -110+110 -35+215-90+115 -135+135 -130+130R -axis (Wrist Roll ) -180+180 -180+180 -180+180 -170+170 -170+170 -180+180 -180+180 -180+180B -axis (W rist Pitch/Yaw ) -110+110 -110+110 -110+110 -110+110 -125+125 -110+110 -110+110 -110+110T -axis (Wrist Twist) -180+180-180+180 -180+180 -180+180 -180+180-180+180 -180+180 -180+180Maximum SpeedRotation180/s 130/s 125/s S -axis (Turning )200/s 170/s130/s 130/s 170/s 200/s 170/s 130/s L -axis (Lower Arm )200/s170/s 130/s 130/s 130/s 200/s 170/s 130/s E -axis (Elbow )200/s170/s 170/s 130/s 130/s 200/s 170/s 170/s U -axis (Upper Arm )200/s 170/s 170/s 130/s 130/s 200/s 170/s 170/s R -axis (Wrist Roll )200/s 200/s 200/s 170/s 130/s 200/s 200/s 200/s B -axis (W rist Pitch/Yaw )230/s 200/s 200/s 170/s 130/s 230/s 200/s 200/s T -axis (Wrist Twist )350/s400/s 400/s 200/s 200/s 350/s 400/s 400/s AllowableMoment R -axis (Wrist Roll )14.7N m31.4N m 58.8N m 117.6N m 377N m 14.7N m 31.4N m 58.8N m B -axis (W rist Pitch/Yaw)14.7N m 31.4N m 58.8N m 117.6N m 377N m 14.7N m 31.4N m 58.8N m T -axis (Wrist Twist )7.35N m 19.6N m 29.4N m 58.8N m 147N m 7.35N m 19.6N m 29.4N m Allowable R -axis (Wrist Roll )0.45kg m 21.0kg m 24.0kg m 26.0kg m 229.6kg m 20.45kg m 21.0kg m 24.0kg m 2Inertia B -axis (W rist Pitch/Yaw)0.45kg m 21.0kg m 24.0kg m 26.0kg m 229.6kg m 20.45kg m 21.0kg m 24.0kg m 2(GD 2/4)T -axis (Wrist Twist )0.11kg m 20.4kg m 22.0kg m 23.0kg m 212.5kg m 20.11kg m 20.4kg m 22.0kg m 2Mass 30kg 60kg 120kg 345kg 640kg 110kg 220kg 380kg Power Requirements *31.0kVA1.5kVA2.2kVA 2.8kVA 5.0kVA1.4kVA2.7kVA4.4kVA*1: F=Floor, W=Wall, C=Ceiling, S=Shelf *2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.MOTOMAN-SIA 5DMOTOMAN-SIA 50DMOTOMAN-SDA 5DMOTOMAN-SDA 10DMOTOMAN-SDA 20DMOTOMAN-SIA 10DMOTOMAN-SIA 20DMOTOMAN-SIA 30DAssembly & DistributingApplication Optimizing RobotsApplicationPress Handling Manipulator Model (MOTOMAN -)EPH 130EPH 130REPH 130RLEPH 4000EP 4000NControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F S S S SControlled Axis 66666Payload130kg 130kg 130kg 200kg 200kg Vertical Reach 3372 mm 3775 mm 4151 mm 2629 mm 2629 mm Horizontal Reach2651 mm3134 mm 3474 mm 3505 mm 3505 mm Repeatability *2±0.2 mm±0.2 mm ±0.3 mm ±0.5 mm ±0.5 mm Range of MotionS -axis (Turning ) -180+180 -180+180 -180+180 -150+150 -150+150L -axis (Lower Arm ) -60+76-130+70-130+70-122+25-122+25U -axis (Upper Arm ) -137.5+230-70+95-70+95-70+53-70+53R -axis (Wrist Roll ) -360+360 -360+360 -360+360 -360+360 -360+360B -axis (Wrist Pitch/Yaw) -130+130 -130+130 -130+130 -120+120 -120+120T -axis (Wrist Twist ) -360+360 -360+360 -360+360 -360+360-360+360Maximum SpeedS -axis (Turning )130/s 110/s 110/s 90/s 90/s L -axis (Lower Arm )130/s110/s 110/s 90/s 90/s U -axis (Upper Arm )130/s110/s 110/s 90/s 90/s R -axis (Wrist Roll )215/s 215/s 215/s 80/s 80/s B -axis (Wrist Pitch/Yaw )180/s180/s 180/s 80/s 80/s T -axis (Wrist Twist )300/s 300/s 300/s 160/s 160/s AllowableMomentR -axis (Wrist Roll )735N m735N m 735N m 1274N m 1274N m B -axis (Wrist Pitch/Yaw)735N m 735N m 735N m 2156N m 2156N m T -axis (Wrist Twist )421N m421N m 421N m 0N m 0N m Allowabl e R -axis (Wrist Roll )45kg m 245kg m 245-130kg m 2*484.5kg m 284.5kg m 2Inertia B -axis (Wrist Pitch/Yaw )45kg m 245kg m 245-130kg m 2*4330kg m 2330kg m 2(GD 2/4)T -axis (Wrist Twist )15kg m 215kg m 215-38kg m 2*480kg m 280kg m 2Mass 1495kg 1420kg 1445kg 3050kg 3100kg Power Requirements *310kVA 10kVA 10kVA 22kVA22kVA*1:F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 84323.*3: Varies in accordance with applications and motion patterns.*4: Varies in accordance with load torque.Press HandlingApplication Optimizing Robots MOTOMAN-EPH 130MOTOMAN-EP 4000NMOTOMAN-EPH 130RMOTOMAN-EPH 130RLMOTOMAN-EPH 4000*1: F=Floor, W=Wall, C=Ceiling, S=Shelf (Note : S -axis motion is limited when mounted on the wall.)*2: Conforms to JIS B 8432.*3: Varies in accordance with applications and motion patterns.*4-130+90(S-axis -90+90)-130+30(S-axis +90+120)-130+30(S-axis -90-120)ApplicationPainting Manipulator Model (MOTOMAN -)EPX 1250EPX 2050PX 2750EPX 2700EPX 2800EPX 2800R EPX 2900ControllerDX 100 Models NX 100 ModelsXRC ModelsNXC 100 ModelsMounting *1F ,W,C F F W F S FControlled Axis 6666666Payload5kg 15kg 10kg 15kg 20kg 15kg 20kg Vertical Reach 1852 mm 2806 mm 3758 mm 5147 mm 4582 mm 4751 mm 4410 mm Horizontal Reach1256 mm 2054 mm 2729 mm 2700 mm 2778 mm 2825 mm 2900 mm Repeatability *2±0.15 mm±0.5 mm±0.5 mm±0.15 mm ±0.5 mm ±0.5 mm ±0.5 mm Range of MotionS -axis (Turning ) -170+170 -90+90 -150+150-125+25, -25+125 -150+150-120+120 -150+150L -axis (Lower Arm )-65+120 -50+100-40+90-65+140-45+120*4-50+110U -axis (Upper Arm )-165+205-163+5+10+168-65+90-85+90-70+90-70+90R -axis (Wrist Roll ) -190+190 -360+360 -260+260 -720+720-360+360 -360+360 -360+360B -axis (Wrist Pitch/Yaw) -145+145 -360+360 -270+270 -720+720-360+360 -360+360 -360+360T -axis (Wrist Twist ) -360+360 -360+360 -260+260 -720+720-360+360-360+360-360+360Maximum SpeedS -axis (Turning )185/s 2.0m/s 2.0m/s 2.0m/s 2.0m/s 2.0m/s155/s L -axis (Lower Arm )185/s 125/s U -axis (Upper Arm )185/s 155/s R -axis (Wrist Roll )360/s 450/s B -axis (Wrist Pitch/Yaw )410/s 550/s T -axis (Wrist Twist )500/s 650/s Allowable MomentR -axis (Wrist Roll )8.0N m 45.8N m 30.4N m 45.8N m 77.4N m 45.8N m 72.0N m B -axis (Wrist Pitch/Yaw)8.0N m 33.8N m 19.6N m 33.8N m 49.9N m 33.8N m 51.5N m T -axis (Wrist Twist )3.0N m 10.8N m 9.8N m 10.8N m 19.6N m 10.8N m 19.6N m Allowable R -axis (Wrist Roll )0.20kg m 21.45kg m 20.97kg m 21.45kg m 22.45kg m 21.45kg m 22.73kg m 2Inertia B -axis (Wrist Pitch/Yaw)0.20kg m 20.79kg m 20.40kg m 20.79kg m 21.20kg m 20.79kg m 21.63kg m 2(GD 2/4)T -axis (Wrist Twist )0.07kg m 20.10kg m 20.10kg m 20.10kg m 20.20kg m 20.10kg m 20.20kg m 2Mass110kg 540kg 560kg 590kg 650kg 820kg 1030kg Power Requirements*31.5kVA5.0kVA 5.0kVA 5.0kVA5.0kVA 5.0kVA5.0kVAType L Type RMOTOMAN -EPX 1250MOTOMAN -EPX 2800MOTOMAN -EPX 2800R MOTOMAN -EPX 2900MOTOMAN -EPX 2050MOTOMAN -PX 2750MOTOMAN -EPX 2700PaintingApplication Optimizing RobotsControllersController ModelDX 100DX 100(Assembly & Distributing )NX 100NXC 100Manipulator Model Small Model VA 1400, MA 1400, MA 1900MA 3100, MH 5, MH 5L, MH 6, MH 6S, HP 20D, HP 20D -6, MPK 2SIA 5D, SIA 10D, SIA 20DHP 3J, MH 5, MH 5LLarge Model MA 1800, VS 50, MS 80, MS 120, ES 165D, ES 165RD, ES 200D,ES 200RD, ES 280D *2, MH 50, MH 50-20, MH 80, MH 165, MH 200,MH 215*2,MH 250*2, UP 350D, UP 400RD, UP 350D -500, UP 350D -600, MPK 50*2, MPL 80*2, MPL 100*2, MPL 160*2, MPL 300*2, MPL 500*2, SIA 30D, SIA 50DSDA 5D, SDA 10D, SDA 20D EPH 130, EPH 130R,EPH 130RL, EPH 4000,EP 4000N Dimensions(W ×H ×D )Small Model425×1200×450 mm (Possible to control 3 external axes )500×580×580 mm (Possible to control 1 external axes )500×1200×500mm (Possible to control 2 external axes )485×183×300 mm (Possible to control 1 external axes )Large Model425×1200×450 mm (Possible to control 2 external axes )500×880×580 mm (Possible to control 1 external axes )600×1200×550 mm(Possible to control 2 external axes)Approximate Mass Small Model100kg 100kg 100kg 16kg Large Model 100kg *2150kg 150kg IEC Protection Class IP 54IP 54IP 51IP 20Dimensions (W ×H ×D )169×314.5×50 mm 169×314.5×50 mm 199×338×60 mm 199×338×60 mm Approximate Mass 0.990kg 0.990kg 1.320kg 1.320kg IEC Protection Class IP 65IP 65IP 65IP 65External Interface CF slot ×1USB Port (1.1)×1CF slot ×1USB Port (1.1)×1CF slot ×1CF slot ×1Number of Controlled Manipulators Up to 8 manipulators Up to 8 manipulators Up to 4 manipulators Up to 4 manipulators Number of Controlled Axes Up to 72 axes Up to 72 axes Up to 36 axes Up to 36 axesNumber ofJOBs Robot 16 JOBs 16 JOBs 8 JOBs 8 JOBs System 4 JOBs 4 JOBs 4 JOBs 4 JOBs Up to 32 groups Up to 32 groups Up to 16 groups Up to 16 groups Robot Up to 8 groups (R 1 to R 8)Up to 8 groups (R 1 to R 8)Up to 4 groups (R 1 to R 4)Up to 4 groups (R 1 to R 4)Base Up to 8 groups (B 1 to B 8)Up to 8 groups (B 1 to B 8)Up to 4 groups (B 1 to B 4)Up to 4 groups (B 1 to B 4)Station Up to 24 groups (S 1 to S 24)Up to 24 groups (S 1 to S 24)Up to 12 groups (S 1 to S 12)Up to 12 groups (S 1 to S 12)JOB CapacityJOB :200000 steps Robot command :10000 steps JOB :200000 steps Robot command :10000 steps JOB :60000 steps Robot command :10000 steps JOB :60000 stepsRobot command :10000 stepsCIO Ladder 20000 steps 20000 stepsStandard :10000 steps Extension :15000 steps Standard :10000 stepsExtension :15000 stepsI/OSystem Input :2048(max.)System Output :2048(max.)System Input :2048(max.)System Output :2048(max.)System Input :1024(max.)System Output :1024(max.)System Input :1024(max.)System Output :1024(max.)Number of JOB NamesUp to 32 digitsUp to 32 digitsUp to 8 digitsUp to 8 digits*1: These specifications and dimensions are for standard specifications and they are subject to change due to the optional installation.*2: When manipulator is ES 280D, MH 215, MH 250, MPK 50, MPL 80, MPL 100, MPL 160, MPL 300, and MPL 500, the regenerative resistor box (120 mm in depth, 50kg ) is mounted on the surface of the backside of the controller. Note : Contact YASKAWA regarding the dimension of the controller for MPL 800.Standard Specifi cations of Controller*1Small modelSmall model(for single -arm robots )Small modelLarge modelLarge model (for dual -arm robots)Large model DX 100NXC 100DX 100(Assembly & Distributing)NX 100Co n t r o l l e rs Pr o g r a m m i n g Pe n d a n t So f t w a r e Number of Controlled GroupsController Model NX 100(Painting )XRC (Painting )ManipulatorModel Standard Pendant EPX 2050, EPX 2700, EPX 2800, EPX 2800R, EPX 2900PX 2750Explosion-proof PendantEPX 2050, EPX 2700, EPX 2800, EPX 2800R, EPX 2900PX 2750Dimensions(W ×H ×D )Standard Pendant974×1200×600 mm(Possible to control 3 external axes )974×900×600 mm(Possible to control 3 external axes)Explosion-proof Pendant 974×1200×600 mm(Possible to control 3 external axes )974×1300×600 mm(Possible to control 3 external axes)Approximate Mass Standard Pendant 250kg 100kg Explosion -proof Pendant 250kg 200kg IEC Protection Class IP 41(Option : IP 54)IP 41Dimensions (W ×H ×D )Standard Pendant 199×338×60 mm 200×325×77 mm Explosion -proof Pendant 235×203×78 mm211×382×75 mmApproximate MassStandard Pendant1.32kg 1.2kgExplosion-proof Pendant 1.25kg 2.0kg IEC Protection Class IP 65IP 40External InterfaceCF slot ×1Standard RS 232C for Backup Explosion -proof N/ANumber of Controlled Manipulators Up to 4 robots Up to 3 robots Number of Controlled Axes Up to 36 axesUp to 27 axesNumber of JOBs Robot 8 JOBs 6 JOBsSystem4 JOBsUp to 16 groupsUp to 8 groupsRobot UP to 4 groups (R 1 to R 4)UP to 3 groups (R 1 to R 3)Base UP to 4 groups (B 1 to B 4)UP to 3 groups (B 1 to B 3)StationUP to 12 groups (S 1 to S 12)UP to 6 groups (S 1 to S6)JOB Capacity 60000 steps 10000 steps60000 steps 10000 steps CIO Ladder Standard :10000 steps Extension :15000 steps 1500 stepsI/OSystem Input :1024(max.)System Output :1024(max.)System Input :256(max.)System Output :256(max.)Number of JOB NamesUp to 8 digitsUp to 8 digits*: These specifications and dimensions are for standard specifications and they are subject to change due to the optional installation.Note : Contact YASKAWA regarding the dimension of the controller for EPX1250.Standard Specifi cations of Controller *Standard pendant model Standard pendant modelExplosion -proof pendant model Explosin -proof pendant modelNX 100(Painting )XRC (Painting )For PaintingCo n t r o l l e r s So f t w a r e Pr o g r a m m i n g Pe n d a n t Number of Controlled Groups。
2024版安川机器人培训教程讲课文档

机器人预防性维护与保养计划
制定维护计划
根据机器人使用频率、 工作环境等因素,制 定合理的预防性维护 与保养计划。
定期检查与保养
按照计划定期对机器 人进行检查、清洁、 润滑等保养工作。
预防性维修
在机器人出现故障前, 提前进行预防性维修, 以延长机器人使用寿 命。
培训操作人员
对机器人操作人员进 行专业培训,提高其 操作和维护技能,减 少人为故障的发生。
机器人安全防护措施
01
02
03
安全区域设置
在机器人工作区域周围设 置安全区域,确保人员不 会进入危险区域。
安全警示标识
在机器人工作区域和周围 设置明显的安全警示标识, 提醒人员注意安全。
定期维护和检查
定期对机器人进行维护和 检查,确保其处于良好的 工作状态,及时发现并处 理潜在的安全隐患。
机器人事故应急处理
以确保机器人性能和安全。
机器人故障排除与维修
ห้องสมุดไป่ตู้
故障诊断
通过故障代码、指示灯等 方式,快速定位机器人故 障。
更换损坏部件
根据故障诊断结果,及时 更换损坏的部件,确保机 器人正常运行。
调整参数设置
针对某些故障,可能需要 调整机器人的参数设置, 以恢复其正常功能。
维修记录
详细记录故障排除和维修 过程,以便后续分析和改 进。
市场规模持续扩大
随着技术进步和应用领域的不断 拓展,机器人市场规模将持续扩
大。
行业应用不断深化
机器人将在更多行业领域得到应 用,推动各行业自动化、智能化
发展。
创新驱动发展
机器人产业将不断涌现新的技术、 新的产品和新的服务模式,创新 驱动将成为产业发展的核心动力。
安川工业机器人伺服部分型号

安川工业机器人伺服部分型号近年来,随着科技的不断进步和工业自动化的快速发展,机器人在工业生产中扮演着越来越重要的角色。
作为一家专注于工业机器人制造的公司,安川工业机器人(Yaskawa Electric)的伺服部分型号备受瞩目。
本文将介绍安川工业机器人伺服部分型号,并探讨它们对工业生产的影响。
一、型号A-1000型号A-1000是安川工业机器人伺服部分中的一款重要产品。
其优势主要体现在三个方面:性能优异、稳定可靠、易于操作。
首先,型号A-1000具有出色的性能。
它采用了先进的数字控制技术和高精度传感器,通过精准的位置控制和转矩控制,实现了精密的运动控制。
不仅如此,A-1000还支持多轴同步运动,可以同时控制多个运动轴,大大提高了生产效率。
其次,型号A-1000具有稳定可靠的特点。
它采用了高品质的元器件和先进的故障诊断系统,能够实时监测设备状况,并及时报警。
一旦出现故障,A-1000能够迅速响应,及时采取措施进行修复,确保工业生产的稳定进行。
最后,型号A-1000操作简单便捷。
它采用了人性化的界面设计和智能化的操作方法,使得工作人员能够轻松掌握使用技巧。
不需要复杂的编程和调试过程,即可实现机器人的运动控制,提高了生产效率和工作效率。
二、型号B-2000型号B-2000是安川工业机器人伺服部分中的另一款重要产品。
它具有以下特点:高效节能、多功能应用、智能化控制。
首先,型号B-2000具有高效节能的特点。
它采用了先进的节能技术和智能控制算法,能够在工作过程中实现能量的有效利用,并最大程度地减少能源的浪费。
与传统的机电设备相比,B-2000能够大幅度降低能耗,不仅节约了能源资源,还降低了生产成本。
其次,型号B-2000具有多功能应用的特点。
它适用于多种工业生产环境和工艺流程,可以灵活应对不同的生产需求。
无论是装配生产线,还是物料搬运,甚至是高精度加工,B-2000都能够胜任。
这使得厂商在选型时更加灵活多样,可以根据实际需要进行选择。
2024版安川机器人DX100培训教材(中文)

20
危险区域识别与防护措施
在机器人工作区域内,应设置明显的安全警示标识和警戒线,以提醒人员注意危险 区域。
对于存在危险的区域,应采取相应的防护措施,如安装安全护栏、安全门等,以防 止人员进入危险区域。
在机器人工作区域内,应定期检查安全设施是否完好,如有损坏应及时更换或修复。
16
故障诊断与排除方法
故障现象识别
故障原因分析
根据机器人异常表现,识别故障现象,如运 动异常、报警代码等。
分析故障现象,确定可能的原因,如电气故 障、机械故障等。
故障排除步骤
维修与更换部件
按照故障排除手册的指导,逐步排查并修复 故障。
根据故障情况,维修或更换损坏的部件,确 保机器人恢复正常
日常保养
每天进行日常清洁和检查,确保机器人处于 良好状态。
定期保养
根据机器人使用频率和环境条件,制定定期 保养计划,包括清洁、紧固、润滑等。
长期停用保养
若机器人长期停用,需进行特殊保养措施, 如定期开机运行、防潮防尘等。
2024/1/25
保养记录与建议
建立机器人保养档案,记录每次保养情况, 并根据实际情况调整保养计划。
喷涂应用
喷涂机器人在汽车、 家电等领域应用广泛, 可实现自动化喷涂, 提高生产效率和产品 质量。
装配应用
装配机器人在电子、 汽车等领域应用广泛, 可实现自动化装配, 提高生产效率和产品 质量。
检测应用
检测机器人在食品、 医药等领域应用广泛, 可实现自动化检测, 提高检测效率和准确 性。
搬运应用
搬运机器人在物流、 仓储等领域应用广泛, 可实现自动化搬运, 提高搬运效率和准确 性。
安川机器人参数s4c说明

安川机器人参数s4c说明安川机器人参数s4c说明简介安川机器人是一种先进的工业机器人,能够实现自动化生产和加工。
其参数s4c是指安川机器人控制系统的相关参数,下面将详细介绍这些参数的含义和作用。
目录•S4C参数介绍–系统参数–机械参数–监控参数•S4C参数详解–系统参数•控制模式•控制周期•机器人轴数•…–机械参数•机器人速度•机器人负载•关节角度范围•…–监控参数•机器人状态•报警处理•故障诊断•…S4C参数介绍在介绍具体的S4C参数之前,我们先了解一下S4C参数的分类。
S4C参数主要分为系统参数、机械参数和监控参数三大类。
系统参数系统参数主要影响机器人的控制模式、运动规划和控制周期等方面,是机器人控制系统的基本配置。
以下是系统参数的一些常见内容:- 控制模式:包括位置控制、速度控制和力控制等。
- 控制周期:指控制系统每隔多少时间进行一次计算和更新。
- 机器人轴数:表示机器人运动的自由度,对应机械臂关节数目。
机械参数体现了机器人硬件方面的特性,包括机器人的速度、负载能力、工作范围等。
以下是机械参数的一些常见内容: - 机器人速度:表示机器人的最大运动速度。
- 机器人负载:指机器人能够承受的最大负载重量。
- 关节角度范围:表示机器人关节的可调节范围。
监控参数监控参数用于监测和处理机器人的状态、报警和故障等信息,确保机器人正常运行和工作安全。
以下是监控参数的一些常见内容: -机器人状态:包括机器人的运行状态、位置信息等。
- 报警处理:用于处理机器人可能出现的各种报警信息。
- 故障诊断:通过监控参数,可以对机器人进行故障诊断和排除。
S4C参数详解接下来,我们将详细解释每个S4C参数的含义和作用。
系统参数控制模式控制模式决定了机器人的控制方式,常见的控制模式有位置控制、速度控制和力控制等。
控制周期控制周期是指控制系统每隔多少时间进行一次数据计算和更新,控制周期越短,机器人的响应速度越快。
机器人轴数是指机器人运动的自由度,也可以理解为机械臂的关节数目,决定了机器人的灵活性和可控性。
安川机器人常见型号【一览表】
企业采用机器人代替人工生产已经不是什么新奇事了,机器人生产具有很多的优势,因而被人们大力推广。
安川机器人就是一个比较有名的品牌,成立至今已经推出多种用途的机器人,下面就来为大家详细介绍安川机器人型号。
安川机器人型号主要有以下几种:
产品一,安川机器人SEMISTAR-M、V系列--MCL,MFL,MFS系列MCL165
MCL165适用于洁净室内大型重物的搬运。
*大负载重达165KG,洁净度达到ISO6级。
产品二,安川机器人SEMISTAR-M、V系列--MCL,MFL,MFS系列SEMISTAR-VD95D SEMISTAR-VD95D适用于真空环境内*大搬运尺寸达730*920mm双腕玻璃基板搬运机器人!
产品三,安川机器人SEMISTAR-M、V系列--MCL,MFL,MFS系列MFS2500D
MFS2500D实现洁净室内多层第8代超大型液晶玻璃基板箱体内的高速搬运!
产品四,安川MS165,MS165紧凑型非常高,动作范围大,有助于回避干涉,在同样姿态下可增加机器人打点数,在提高生产效率和操作便利性上为用户提供有利帮助。
产品五,安川MH24,MH24采用中空手臂设计,可以内置电缆以便减少作业干扰。
MH24
安全性能优异,具有减速机和硬件的预防护功能,还可以监视机器人和极限动作。
其实安川机器人型号还有很多,这里就不在一一介绍了,每种型号都有各自的特点以及用途,因此大家在选择的时候一定要结合实际需要,不要盲目的选择,为自己带来不必要的麻烦。
2024版安川机器人培训资料

contents •机器人基础知识•安川机器人产品介绍•机器人操作与编程•机器人维护与保养•机器人应用案例分享•培训总结与展望目录01机器人基础知识机器人定义与分类机器人定义机器人分类机器人发展历程第一代机器人示教再现型机器人,主要由控制器和示教盒组成,通过人工示教的方式让机器人学习并重复执行特定任务。
第二代机器人带感觉的机器人,配备了各种传感器,如视觉、触觉、力觉等,使机器人能够感知外部环境并作出相应反应。
第三代机器人智能机器人,具有自主学习和决策能力,能够通过与环境的交互不断提高自身性能。
服务行业机器人在服务行业的应用包括餐饮服务、酒店服务、导游服务等。
它们能够提供高效、便捷的服务,提升客户体验。
工业制造机器人在工业制造领域的应用最为广泛,包括焊接、装配、喷涂、搬运等各个环节。
它们能够提高生产效率、降低人力成本并改善工作环境。
医疗保健机器人在医疗保健领域的应用包括手术协助、康复训练、患者照护等。
它们能够减轻医护人员的工作负担,提高医疗服务的效率和质量。
军事安全机器人在军事安全领域的应用包括侦察、排雷、反恐等。
它们能够在危险环境下执行任务,保障人员的安全。
机器人应用领域02安川机器人产品介绍安川机器人系列MOTOMAN系列高性能、高效率的工业机器人,广泛应用于焊接、切割、装配等领域。
GP系列通用型工业机器人,适用于搬运、码垛、上下料等任务。
HC系列协作型机器人,可与人协同工作,适用于柔性生产线和智能制造场景。
安川机器人特点与优势采用先进的控制算法和传动技术,实现高精度定位和重复定位。
优化机械结构和控制系统,提高机器人运动速度和加速度。
采用高品质材料和严格的生产工艺,确保机器人长期稳定运行。
提供友好的操作界面和编程环境,降低用户使用难度。
高精度高速度高可靠性易用性安川机器人应用领域01020304汽车制造电子电器塑料橡胶食品饮料03机器人操作与编程主界面配置界面监控界面调试界面操作界面及功能介绍编程语言与指令系统使用专用的编程软件,通过拖拽、配置参数等方式编写机器人程序。
安川电机机器人技术的介绍

安川电机机器人技术的介绍安川电机是一家全球领先的机器人制造商和自动化解决方案提供商。
公司成立于1915年,总部位于日本,现在已经发展成为全球范围内拥有超过10,000名员工的大型企业。
一、产品系列工业机器人是安川电机机器人技术的重点产品之一、其具有高速、高精度和高负载能力的特点,可用于各种自动化任务,如装配、焊接、喷涂等。
这些机器人能够以高度准确的方式执行复杂的操作,并且能够适应不同的生产环境。
协作机器人是最近几年安川电机机器人技术的新兴产品。
这些机器人能够与人类工作在同一空间,实现人机协作。
它们具有易于操作、安全性高的特点,可以在需要与人类密切合作的任务中发挥作用。
例如,在工厂中与工人共同组装产品或在医院中与医生合作进行手术等。
二、技术创新首先,安川电机机器人技术在控制系统方面取得了重大突破。
他们开发了高级控制算法和智能感知技术,使机器人具有更高的运动灵活性和自适应性。
这些技术使机器人能够更精确地执行任务,并适应复杂多变的工作环境。
其次,安川电机机器人技术在机器人外观设计方面也积极创新。
他们注重用户体验,设计了简洁、灵活、易于操作的机器人外观。
这些机器人不仅性能出色,而且操作起来非常简单,即使对于没有专业知识的人来说也很容易上手。
三、应用案例1.汽车制造:安川电机机器人技术在汽车制造业中得到广泛应用。
机器人可以执行各种操作,例如车身焊接、零件加工和组装等。
使用机器人可以大大提高生产效率,减少错误,并提高产品的一致性和质量。
2.电子设备制造:安川电机机器人技术在电子设备制造业中也发挥着重要作用。
机器人可以执行细节精确的任务,如电路板组装、电子元件焊接等。
使用机器人可以提高生产效率,减少损坏和废品,并确保产品质量。
3.食品加工:安川电机机器人技术在食品加工业中很受欢迎。
机器人可以执行各种任务,如食品包装、食材切割和烹饪等。
机器人可以提高效率,减少食品浪费,并确保食品的安全性和卫生性。
总结:安川电机机器人技术是一种先进的自动化解决方案,用于提高生产效率、降低成本和增强竞争力。
安川机器人输出信号50016

安川机器人输出信号50016
摘要:
1.安川机器人概述
2.安川机器人的常用型号及应用领域
3.安川机器人外部启动信号及其接线图
4.结束语
正文:
一、安川机器人概述
安川机器人是一种广泛应用于工业领域的自动化机器人,以其出色的性能和可靠的稳定性而著称。
在我国,安川机器人已经成为了众多行业中必不可少的重要设备,助力我国工业生产效率的提升。
二、安川机器人的常用型号及应用领域
安川机器人有很多种型号,下面列举一些常用型号及其应用领域:
1.通用机器人:gp7、gp8、gp12、gp25、gp50、gp88、gp180、
gp180-120、gp225 等。
这些机器人广泛应用于装配、搬运、上下料等常规工业生产场景。
2.焊接机器人:ar1440、ar2010。
这些机器人主要用于金属焊接领域,提高了焊接质量和效率。
3.防爆机器人:这些机器人适用于易爆环境中的自动化作业,保证了人员安全和生产连续性。
三、安川机器人外部启动信号及其接线图
安川机器人外部启动信号通常包括以下几个:
1.启动信号:用于启动机器人执行任务。
2.停止信号:用于停止机器人执行任务。
3.紧急停止信号:用于紧急停止机器人执行任务,以确保人员安全。
4.其他控制信号:例如方向控制、速度控制等,用于控制机器人执行任务过程中的具体动作。
具体的接线图需要根据机器人的具体型号和应用场景来绘制,一般来说,接线图应包括电源线、信号线、控制线等,确保接线准确无误,以保证机器人的正常运行。
四、结束语
安川机器人作为一种重要的工业自动化设备,在我国的工业生产领域发挥着重要作用。
安川机器人各个系列详细资料

驱动功 率
9.5KVA
安装方 式
倒挂、壁挂、地面
安全问 题
机器人有自动《碰撞检测功能》,机器人最大干 扰力 为100L,超过数值,机器人自动停止。
码垛能力范 围
与配套设计有关系
湿度
0~+45℃
安装环 境
温度 振动 其它
20~80%RH(无结露)
4.9m/s2以下 ◆不可有引火性及腐蚀性气体、 液体 ◆不可用涉水、油、粉等 ◆不可靠近电磁气源头
产品详细参数
型 号
MPL100
用 途
涂装、搬运、码垛、装配、切割
构 造
垂直多关节
自由 度
6轴 分:S、L、U、R、B、T
可
搬重 量
100KG(要算上抓手工件的重量)
本
体重 量
1700KG
重复定位精 度
±0.5mm
作业半径范 围
3159MM
输入电 压
200V—60HZ或220V—50HZ
驱动方 法
伺服马达
应用领域: ②、喷涂:汽车类、玩具类、电子类、塑胶类、家电类等。
③、焊接:汽车类、电子类、家电类、金属加工类、锯造类等。
广泛应用 于:
弧焊、点焊、涂胶、切割、搬运、码垛、喷漆、科研及教学
0~+45℃ 20~80%RH(无结露)
4.9m/s2以下 可有引火性及腐蚀性气体、 可用涉水、油、粉等 可靠近电磁气源头
喷涂能力范围这方面和配套设计有关系防暴机器人需专门购买305最快速度140弧焊点焊涂胶切割搬运码垛喷漆科研及教学95kva140与配套设计有关系倒挂壁挂地面140机器人有自动碰撞检测功能机器人最大干扰力为超过数值机人自动停200v60hz或220v50hz伺服马达36100kg要算上抓手工件的重量动作范围181700kg05mm3159mm产品详细参数产品详细参数mpl100安装环境04涂装搬运码垛装配切割2080rh垂直多关节49ms不可有引火性及液体不可用涉水油不靠近电磁气45120类等行业
安川电机机器人技术的介绍
MOTOMAN-VA1400
动作特性的提高及高速化,提高了生产性
■ 实现了世界做高速度 (各轴动作速度最大提高5%)*
■ 最大可达距离扩大至1434mm(提高44mm)*
*:与我司6轴旧机型相比
弧焊最适化的结构、功能的延续
焊接功率 电缆
使用性的提高、多种设置方式
■ 焊接供电电缆内置于底座内 ■ 焊接地线、保护气管、空气管可内置于
• 可进行多台机器人的仿真(高密度布置验证时不可或缺) • 对独立、协调功能的支持(双机协调功能、双腕机器人) • 可计算出高精度节拍
<其它特点>
• 机器人语言全命令的支持
• (控制界面)可视化示教盒的操作简单(与实际示教盒操作相同)
• 继承了MotoSim EG的操作性
• 各种条件文件、参数的编辑
MOTOMAN
一边看图一边设定波型(焊接特性)
YASKAWA Robotics Division 14
新型机器人控制柜“DX100”的弧焊功能 -电弧监视功能-
通过示教盒监视焊接状态
可以通过机器人控制柜示教盒监视焊接结果。
■电弧监视器功能
・焊接电流、电压的图示化
MOTOMAN
YASKAWA Robotics Division 15
アーク発生直後に、 パルス状の電流を印加 → 入熱を与えるとともに、 ワイヤ溶融を促進
電圧減少率を調整し、 入熱制御、短絡促進。
MOTOMAN
相比以往数字电源,飞溅最大可以减1/5。 YASKAWA Robotics Division
使用MOTOWELD-EL电源的2次侧断路 回路进行焊接的高速状态下拍摄的影像
日本安川机器人

I/O接口(例CN308)
I/O接口(例CN307)
MXT端口
MXT端口
控制电源接口
建议:为了安全起见,采用第二种,外接外部电源控制。
三种模式
示教模式 再现模式 远程模式
I/O定义
外部输入:通过CN306-CN309接入,200XX 外部输出:通过CN306-CN309接入,300XX 通用输入:内部辅助继电器(运行程序和梯
☆安川模式:机器人故障维修或者升 级时。(型号不同,密码不同)
接线端口
I/O接口(CN306/CN307/CN308/CN309) MXT接口 控制电源接口(DC24V)
I/O接口
输入:40点 输出:40点 关于输入输出的分配,根据用途不 同,有专用输入输出和通用输入输 出2种。 专用输入输出:已经定义好了,可 以直接用;
如果需要使用模拟量输出,需要增加基板。
梯形图程序
STR/STR-NOT/AND/AND-NOT/OR/OR-NOT GSTR/GOUT TMR ADD/SUB/MUL/DIV BIN/BCD MOV WAND/WOR
通讯基板
CC-LINK通讯板 PROFIBUS通讯板 DEVICE-NET通讯板 以太网通讯板 其它
通常各种通讯基板安装时不需要驱动,只需要在软 件内设置。
主菜单区Βιβλιοθήκη 状态显示区状态显示区
安全模式
四种安全模式:
☆操作模式:此模式是操作者进行的 基本操作模式。(如机器人的启动 及停止恢复)
☆编辑模式:该模式下使操作者能进 行示教和编辑程序,并可对机器人 进行设置。 (密码:00000000)
☆管理模式:本模式为建立和维护机 器人系统:如参数、系统时间的设 定以及用户口令的变更。 (密码: 99999999)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
±360° 140°/s 140°/s 140°/s 305°/s
电类、塑胶类等行业。
驱动功 率
9.5KVA
安装方 式
倒挂、壁挂、地面
安全问 题
机器人有自动《碰撞检测功能》,机器人最大干 扰力 为100L,超过数值,机器人自动停止。
码垛能力范 围
与配套设计有关系
湿度
0~+45℃
安装环 境
温度 振动 其它
20~80%RH(无结露)
4.9m/s2以下 ◆不可有引火性及腐蚀性气体、 液体 ◆不可用涉水、油、粉等 ◆不可靠近电磁气源头
产品详细参数
型 号
MPL100
பைடு நூலகம்
用 途
涂装、搬运、码垛、装配、切割
构 造
垂直多关节
自由 度
6轴 分:S、L、U、R、B、T
可
搬重 量
100KG(要算上抓手工件的重量)
本
体重 量
1700KG
重复定位精 度
±0.5mm
作业半径范 围
3159MM
输入电 压
200V—60HZ或220V—50HZ
驱动方 法
伺服马达
S轴(旋转)
±180°
L轴(下臂)
﹢90°
动作范 围
U轴(上臂)
R轴(手腕旋 转)
B轴(手腕摆 动)
T轴(手腕回 转)
S轴
﹢15.5° -
±360° 140°/s
L轴
140°/s
最快速
U轴
度 R轴
140°/s -
喷涂能力范 这方面和配套设计有关系,(防暴机器人需专门
B轴
围
购买)
T轴
305°/s
①、码垛与搬运:食品饮料类、医药类、烟草类、汽车类、化工类、物流类、家电类、塑胶类等行业。
应用领域: ②、喷涂:汽车类、玩具类、电子类、塑胶类、家电类等。
③、焊接:汽车类、电子类、家电类、金属加工类、锯造类等。
广泛应用 于:
弧焊、点焊、涂胶、切割、搬运、码垛、喷漆、科研及教学
0~+45℃ 20~80%RH(无结露)
4.9m/s2以下 可有引火性及腐蚀性气体、 可用涉水、油、粉等 可靠近电磁气源头