基于Matlab的网络控制系统仿真平台
基于物联网的图形化虚拟仿真实验平台设计

基于物联网的图形化虚拟仿真实验平台设计领兄【摘要】The virtual simulation platform proposed in this paper and working in Web environment is based on B/S struc?ture. The MySQL is adopted by the server. The Java language is used to profile the interface program,read the model data in da?tabase,and generate the Simulink simulation program. Matlab as the operation core is used to run the M?file to simulate the model file by calling the Java interface program and feed the simulation results back. The virtual simulation platform based on network was tested by means of two simulation examples to verify the validity of the platform.%提出的Web环境下的虚拟仿真平台基于B/S结构,服务器端采用MySQL数据库,使用Java语言编写接口程序,从数据库中读取模型数据并生成Simulink仿真程序,运算核心Matlab运行M文件,通过调用Java 接口程序对该模型文件进行仿真并返回仿真结果。
最后,结合两个仿真实例来测试基于网络的虚拟仿真平台,验证了该平台的有效性。
【期刊名称】《现代电子技术》【年(卷),期】2017(040)001【总页数】5页(P32-35,40)【关键词】虚拟仿真平台;Matlab;Simulink;虚拟实验室【作者】领兄【作者单位】呼和浩特职业学院计算机信息学院,内蒙古呼和浩特 010051【正文语种】中文【中图分类】TN911-34;TM417近年来高校规模不断增大,学生人数的不断增加造成实验室设备资源紧张、不能满足学生要求的现象[1]。
基于MATLAB的simulink对信号调制与解调的仿真
基于MATLAB的对信号调制与解调的仿真摘要Simulink是Mathworks公司推出的基于Matlab平台的著名仿真环境Simulin作为一种专业和功能强大且操作简单的仿真工具,目前已被越来越多的工程技术人员所青睐,它搭建积木式的建模仿真方式既简单又直观,而且已经在各个领域得到了广泛的应用。
本文主要是以simulink为基础平台,对2ASK、2FSK、2PSK信号的仿真。
文章第一章内容是对simulink的简单介绍和通信技术的目前发展和未来展望;第二章是对2ASK、2FSK和2PSK信号调制及解调原理的详细说明;第三章是本文的主体也是这个课题所要表现的主要内容,第三章是2ASK、2FSK和2PSK信号的仿真部分,调制和解调都是simulink建模的的方法,在解调部分各信号都是采用相干解调的方法,而且在解调的过程中都对整个系统的误码率在display模块中有所显示本文的主要目的是对simulink的熟悉和对数字通信理论的更加深化和理解。
关键词:2ASK、2FSK、2PSK,simulink,调制,相干解调目录摘要 (32)第一章绪论 (34)1.1 MATLAB/Smulink的简介 (34)1.2 通信发展简史....................................... 错误!未定义书签。
4 1.3 通信技术的现状和发展趋势........................... 错误!未定义书签。
7 第二章 2ASK、2FSK、2PSK和2DPSK的基本原理和实现...... 错误!未定义书签。
7 2.1 2ASK的基本原理和调制解调实现..................... 错误!未定义书签。
8 2.2 2FSK的基本原理和调制解调实现.................... 错误!未定义书签。
11 2.3 2PSK的基本原理和调制解调实现................... 错误!未定义书签。
基于matlab gui的控制系统界面设计毕业设计论文
基于MATLAB GUI的控制系统界面设计摘要:MATLAB语言是一种十分有效的工具,能容易地解决在系统仿真及控制系统设计领域的教学与研究中遇到的问题,它可以将使用者从频繁的底层编程中解放出来,把有限的宝贵时间更多地华仔解决科学问题上。
MATLABA GUI是MATLAB人际交互界面。
由于GUI本身提供了windows基本控件的支持,并且具有良好的时间驱动机制,同时提供了MATLAB数学库的接口,所以GUI对于控制系统仿真的平台设计显得十分合适。
GUI对于每个用户窗口生成.fig和.m 文件。
前者负责界面的设计信息,后者负责后台代码的设计。
本文界面设计主要基于MATLAB GUI平台,结合控制系统基础理论和MATLAB控制系统工具箱,实现了用于控制系统界面的设计。
主要包括:进行常规控制环节(比如PID)的图形界面设计,能够在已知传输函数的情况下,输出常用响应曲线。
关键词:控制系统;MATLAB GUI;计算机设计Control system based on MATLAB GUI interface designAbstract: MATLAB language is a very effective tool,and can be easily resolved in the system simulation and control system of teaching in the field of computer-aided design and research problems,it could be the bottom of the user from tedious programming liberate the limted spend more valuable time to solve scientific problems. The MATLAB GUI is the interative interface.As the GUI itself provides the basic control windows support,and has a good mechanism for event-driven,while providing the MATLAB Math Library interface,the GUI for control system simulation platform for the design of it is suitable. GUI window generated for each user.Figand .M file. The former is responsible for the design of the interfaceinformation,which is responsible for the design of the background code.Research done in this article is mainly based on MATLAB GUI platform,the basis of combination of control syetem theory and MATLAB Control System Toolbox,the realization of control systems for computer-aided analysis and design software.Mainly includes:routine control links,such as PID,graphical interface design,can in the known transfer function of the case,the output respnonse curve is commonly used.Key words: Control System;MATLAB GUI;Computer design目录1 概述 (1)1.1 本文研究的目的以及意义 (1)1.2 已了解的本课题国内外研究现状 (1)1.3 本课题研究内容 (3)2 控制系统与MATLAB语言 (3)2.1 控制系统理论基础 (3)2.1.1 控制系统的古典理论与现代理论 (3)2.1.2 控制系统理论的基本内容 (4)2.2 MATLAB语言与控制系统工具箱 (4)2.2.1 MATLAB软件介绍 (5)2.2.2 控制系统工具箱介绍 (7)3 MATLAB简介及应用 (9)3.1 MATLAB GUI (9)3.2 图形用户界面设计工具的启动 (10)3.2.1图形用户界面设计工具的启动方式 (10)3.2.2 菜单方式 (10)3.2.3 图形用户界面设计窗口 (13)3.3 图形用户界面开发环境(GUIDE) (14)3.4 控件对象及属性 (16)3.5 菜单设计 (18)3.5.1 建立用户菜单 (18)3.5.2 菜单对象常用属性 (18)3.5.3 快捷菜单 (18)3.5.4 对话框设计 (19)3.5.5 公共对话框 (19)3.6 GUI程序设计 (19)4 GUI控制系统界面 (20)4.1 GUI控制系统界面设计 (20)4.1.1 具体设计步骤 (20)4.2 具体实现过程 (23)4.2.1 运行效果 (23)4.2.2 实现代码 (24)[参考文献] (25)附录 (26)谢辞 (29)1 概述1.1 本文研究的目的以及意义自动控制原理是自动控制专业和自动化专业的主要课程之一[3],是研究自动控制技术的基础理论课,是必修的专业基础课程。
自动控制原理试题
4.以下不属于非线性系统特点的是( )
A. 满足叠加性 B. 存在自激振荡 C.有多个平衡点 D. 频率响应会畸变
5.设系统开环传递函数为 ,则开环放大倍数为( )
A. ; B. 6; C. 12; D. 2
三、判断题(每小题2分,共10分)
1)系统的闭环脉冲传递函数;(4分)
2)判定系统的稳定性;(4分)
3)说明零阶保持器对系统的影响。(4分)
六、控制系统两种结构方案如图所示。(12分)
1)如何调整K1,K2和K3,使系统获得良好动态性能?
2)比较两种方案的特点。
七、已知单位反馈系统传递函数为 ,(14分)
1)试绘制概略根轨迹。
2)分析各参数变化对系统性能的影响。
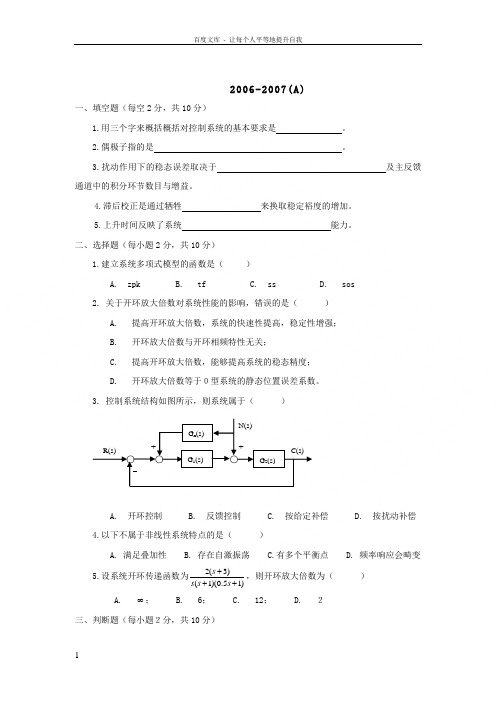
A. zpk B. tf C. ss D. sos
2.关于开环放大倍数对系统性能的影响,错误的是( )
A. 提高开环放大倍数,系统的快速性提高,稳定性增强;
B. 开环放大倍数与开环相频特性无关;
C. 提高开环放大倍数,能够提高系统的稳态精度;
D. 开环放大倍数等于0型系统的静态位置误差系数。
3. 控制系统结构如图所示,则系统属于( )
则T =秒,A =。
二、求图示系统的传递函数。(10分)
三、稳定性分析(共2题,5分/题,共10分)
1.已知系统的特征方程如下,应用劳斯稳定判据判定稳定性。
2.设二阶非线性系统 ,判定系统奇点的类型并给出Matlab仿真程序。
四、已知渐进对数幅频特性曲线如图所示,求开环传递函数,并求截止频率、相角裕度。
(16分)
五、设带理想继电特性的非线性控制系统如图所示。设系统的初始状态为零,利用相轨迹法分析系统在阶跃信号作用下的运动过程(10分)。
基于Matlab的移相全桥变换器仿真实验平台设计

入输出信号相同即可。所建立的模型可以是程序模块 或基本单元组成的电路模块。
将移相脉冲发生 器 看 作 由 脉 冲 信 号 发 生 器、移 相 信号发生器和死区时间设置3部分组成的一个功能模 块 ,如 图 6 所 示 。 其 中 ,脉 冲 信 号 发 生 器 产 生 频 率 固 定 且占空比为50%的互补方波脉冲 Q 和 QN;移相 信 号 发生器产生相对 于 脉 冲 波 形 Q 和 QN 有 一 定 相 位 差 的互补方波脉冲 Q’和 QN’,此 相 位 差 的 大 小 由 调 节 器的输出决定,小于方波脉冲周期 的 1/2;死 区 时 间 设 置模块分别设置两组互补方波脉冲之间的死区时间。
图2 主电路的 Matlab模型图
主电路中的变压器起着隔离和传输功率的作用, 变 压 器 次 级 与 二 极 管 构 成 全 波 整 流 器 ,如 图 2 所 示 ;滤 波器为常用 的 倒 “L”型 结 构;负 载 由 带 有 跳 变 装 置 的 电阻 Ro1和 Ro2组成。跳变装置 S1和 S2的构成如图3 所 示 ,其 作 用 是 测 试 系 统 在 负 载 变 化 时 的 动 态 响 应 ,使 负载电阻在t=0.01s(该时间值可自行设定)处 从 Ro1 跳变到 Ro2。
图 3 负 载 跳 变 模 块 构 成 图
由于 Matlab仿真工具箱中没有运放模块,故补偿 网络可以采用 PI或 PID 模 块[7-9],或 者 直 接 用 带 有 限 幅 功 能 的 传 递 函 数 模 块 ,如 图 5 所 示 。
2.2 控 制 系 统 模 型 的 建 立 移相全桥变换器的控制系统包含调节器和移相脉
首先利用控制对象传递函数类型选定补偿网络结构然后依据频率特性曲线设定补偿网络的零极点再根据系统开环传递函数频率特性曲线的期望穿越频率调整补偿网络增益就得到了反馈控制中补偿网络的传递函数gcv56表示可以通过设置零极点转化为单零点单极点等其他类型的传递函数表达式
基于MATLAB的MAC协议仿真分析

基于MATLAB的MAC协议仿真分析作者:朱逢园党旺来源:《数码设计》2020年第10期摘要:随者无线网络技术和互联网的快速发展,无线局城网凭借着灵活、力便等优势,已经被广泛应用。
本文以MATLAB软件为主要开发工具,分析了MAC层的DCF访问机制,在MATLAB平台上实现IEEE 802.11系列标准协议中关键物理层技术和MAC层接入机制的性能仿真和验证。
关键词:无线局域网;MAC;DCF中图分类号:TN929;文献标识码:A;文章编号:1672-9129(2020)10-0039-011;序言随着无线网络技术的快速发展,MAC作为媒体访问控制协议,其主要作用是控制每个通信节点对信道的访问,解决冲突,实现高效共享。
近年来,许多研究者致力于IEEE802.11无线网络性能的分析、研究和改进,但大部分工作局限于无AP无线局域网的性能,能够用于提高AP通信能力(通常称为提高节点的优先级)的研究很少,本文将系统研究无线网络中常用的MAC层协议,并对其进行仿真。
2;IEEE802.11 MAC接入控制协议概述MAC层的功能主要由层协议来完成,层协议定义了访问媒体的规则。
层协议决定了网络容量,系统频率利用率、网络性能等,以及无线媒体访问控制的协调功能,包括分布式协调功能、协调功能、协调功能混合等[1]。
2.1 CSMA/CA载波侦听机制该技术是利用载波传感技术来比较待测信号与参考点。
如果信号强度低于参考点,则说明频带尚未使用。
工作站可以使用这个带宽发送和接收数据。
反之,如果信号强度高于参考点,说明当前传输介质处于忙碌状态,则工作站必须延迟传输时间,继续检测传输介质,直到传输介质处于空闲状态,才能传输帧。
在标准中,物理层评估无线媒体的空闲时间,并使用物理载波截取该层对无线传输介质的占用情况进行估计,利用网络分配向量进行估计,实现虚拟截取,避免不必要的传输尝试。
只有当两种监听机制的监听结果空闲时,才可以认为无线媒体处于空闲状态。
基于MATLAB控制系统的仿真与应用毕业设计论文

基于MATLAB控制系统的仿真与应用毕业设计论文目录一、内容概括 (2)1. 研究背景和意义 (3)2. 国内外研究现状 (4)3. 研究目的和内容 (5)二、MATLAB控制系统仿真基础 (7)三、控制系统建模 (8)1. 控制系统模型概述 (10)2. MATLAB建模方法 (11)3. 系统模型的验证与校正 (12)四、控制系统性能分析 (14)1. 稳定性分析 (14)2. 响应性能分析 (16)3. 误差性能分析 (17)五、基于MATLAB控制系统的设计与应用实例分析 (19)1. 控制系统设计要求与方案选择 (20)2. 基于MATLAB的控制系统设计流程 (22)3. 实例一 (23)4. 实例二 (25)六、优化算法在控制系统中的应用及MATLAB实现 (26)1. 优化算法概述及其在控制系统中的应用价值 (28)2. 优化算法介绍及MATLAB实现方法 (29)3. 基于MATLAB的优化算法在控制系统中的实践应用案例及分析对比研究31一、内容概括本论文旨在探讨基于MATLAB控制系统的仿真与应用,通过对控制系统进行深入的理论分析和实际应用研究,提出一种有效的控制系统设计方案,并通过实验验证其正确性和有效性。
本文对控制系统的基本理论进行了详细的阐述,包括控制系统的定义、分类、性能指标以及设计方法。
我们以一个具体的控制系统为例,对其进行分析和设计。
在这个过程中,我们运用MATLAB软件作为主要的仿真工具,对控制系统的稳定性、动态响应、鲁棒性等方面进行了全面的仿真分析。
在完成理论分析和实际设计之后,我们进一步研究了基于MATLAB 的控制系统仿真方法。
通过对仿真模型的建立、仿真参数的选择以及仿真结果的分析,我们提出了一种高效的仿真策略。
我们将所设计的控制系统应用于实际场景中,通过实验数据验证了所提出方案的有效性和可行性。
本论文通过理论与实践相结合的方法,深入探讨了基于MATLAB 控制系统的仿真与应用。
基于matlab simulink的直流微电网的建模和仿真

直流微电网的建模和仿真目录1 引言 (3)1.1 目的 (3)1.2 文档格式 (3)1.3 术语 (3)1.4 参考文献 (3)2 系统概述 (4)3直流微网的能量管理方法 (4)4系统建模 (5)4.1PV电池 (5)4.2 PV电池DCDC变换器建模 (8)4.3蓄电池双向DCDC1变换器建模 (9)4.4逆变器建模 (11)4.5负载建模 (12)4.6蓄电池建模 (13)5仿真验证 (13)6结论 (18)1 引言1.1 目的该文档针对独立智能供电及生活保障系统的需求,给出了提供智能供电的直流微电网系统框架,并根据这一框架搭建理论模型和仿真模型。
验证这一直流微电网系统的功能可行性。
1.2 文档格式本文档按以下要求和约定进行书写:(1)页面的左边距为2.5cm,右边距为2.0cm,装订线靠左,行距为最小值20磅。
(2)标题最多分三级,分别为黑体小三、黑体四号、黑体小四,标题均加粗。
(3)正文字体为宋体小四号,无特殊情况下,字体颜色均采用黑色。
(4)出现序号的段落不采用自动编号功能而采用人工编号,各级别的序号依次为(1)、1)、a)等,特殊情况另作规定。
1.3 术语1.4 参考文献2 系统概述图1 直流微网的系统框图图1为直流微网的系统框图,仿真系统包括以下几个部分:1)PV组件的特性模型2)蓄电池的模型3)PV组件后的DCDC拓扑模型和控制模型4)蓄电池后双向DCDC1的拓扑模型和控制模型5)逆变器包括:单相逆变器和三相逆变器的拓扑模型和控制模型6)交流负载模型7)直流负载模型8)超级电容模型(暂缺)9)超级电容后双向DCDC2的拓扑模型和控制模型(暂缺)10)柴油机模型(暂缺)11)智能控制器2与光伏智能控制器的协调控制模型(暂缺)3直流微网的能量管理方法能量管理思想:管理微网中各分布电源的能量流动,使得微网工作最优状态。
以下为结合我们项目的一个能量管理原则,有了这个管理原则,就可以明确各个分布电源的控制方法。
matlab电路仿真教程

基于MATLAB/Simulink的直流电路仿真分析
电路如图所示,参数如下:R1=2,R2=4,R3=12,R4=4,R5=12,R6=4, R7=2,Us=10V。求i3,U4,U7;
仿真结果
举例说明 Sim6_1.mdl
三、Simulink常用模块介绍
在模块浏览器中的Simulink节点下包含了搭建一个Simulink模块所
需要的基本模块。本节主要对其中的Sources模块库、Sinks 模块库、 Simpower systeems模块库中的常用模块进行介绍。
Sources 模块
阶跃函数,起始时间是第1秒而非0秒。双击step模块, 对仿真起始时间(step time)和阶跃值(Initial value, Final value) 的大小进行设置。
举例说明
2. 对信号线的操作
改变粗细、设定标签、线的折弯、线的分支 举例说明
3. 对运行仿真的操作
设置仿真参数 启动仿真 仿真结果分析
(1)设置仿真参数
Simulink模块编辑窗口菜单栏: Simulation /Simulation Parameters Solver页: 设置仿真的开始和结 束时间,选择解法器, 说明解法器参数及选择 一些输出选项
Communications Blockset(通信模块集)
Control Neural
System Toolbox(控制系统工具箱)
Network Blockset(神经网络模块集)
Power System
Blockset(电源系统模块集)
……
3. Simulink模块编辑窗口
启动方式: (1)模块库浏览器的菜单“File”/“New”/“Model”命令 (2)单击工具栏上的 图标
基于matlab的智能PID控制器设计和仿真毕业设计论文
基于MATLAB的智能PID控制器设计与仿真摘要在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
传统的PID控制器原理十分简单,即按比例、积分、微分分别控制的控制器,但是他的核心也是他的难点就是三个参数(比例系数Kp、积分系数Ki、微分系数Kd)的整定。
参数整定的合适,那么该控制器将凭借结构简单、鲁棒性好的优点出色的完成控制任务,反之则达不到人们所期望的控制效果。
人工神经网络模拟人脑的结构和功能而形成的信息处理系统,是一门十分前沿高度综合的交叉学科,并广泛应用于工程领域。
神经网络控制是把自动控制理论同他模仿人脑工作机制的数学模型结合起来,并拥有自学习能力,能够从输入—输出数据中总结规律,智能的处理数据。
该技术目前被广泛应用于处理时变、非线性复杂的系统,并卓有成效。
关键词自适应PID控制算法,PID控制器,神经网络Design and simulation of Intelligent PID Controllerbased on MATLABAbstractPID controller ,the control method which is developed on the basis of classical control theory, is widely used in industrial production.The Principle of traditional PID controller is very simple, which contains of the proportion, integral, differential three component, but its core task and difficulties is three parameter tuning(proportional coefficient Kp, integral coefficient Ki and differential coefficient KD).If the parameter setting is suitable, the controller can accomplish the control task with the advantages of simple structure and good robustness;but on the contrary, it can not reach the desired control effect which we what.Artificial neural network , the formation of the information processing system which simulate the structure and function of the human brain , is a very high degree of integration of the intersection of disciplines, and widely used in the field of engineering. Neural network control ,combining automatic control theory and the imitate mathematical model of the working mechanism of human brain , has self-learning ability, and can summarize the law of the input-output data , dealing with data intelligently .This technique has been widely used in the process of time-varying, nonlinear and complex system, and it is very effective.Key W ord:Adaptive PID control algorithm,PID controller,Neural network目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 课题研究背景及意义 (1)第二章 PID控制器 (2)2.1 PID控制原理 (2)2.2常规PID控制器的算法理论 (3)2.2.1 模拟PI D控制器 (3)2.2.2 数字P I D控制算法 (3)2.2.3常规PID控制的局限 (5)2.2.4 改进型PID控制器 (5)第三章人工神经网络 (8)3.1 人工神经网络的原理 (8)3.2神经网络PID控制器 (8)3.2.1神经元PID控制器 (8)3.2.2 单神经元自适PID应控制器 (9)3.3 BP神经网络参数自学习的PID控制器 (12)第四章MATAB仿真 (16)4.1 仿真过程 (16)第五章结论与展望 (24)致谢 (25)参考文献 (25)华东交通大学毕业设计(论文)第一章绪论1.1 课题研究背景及意义在工业生产中应用非常广泛的是PID控制器,是最早在经典控制理论基础上发展起来的控制方法,应用也十分广泛。
桂林电子科技大学信息与通信学院2012毕业设计总表

TDMA(3路输入信号)通信系统的实现
61 改进的自组织神经网络的研究(邻域特性) 62 改进的自组织神经网络的研究(学习速率)
63 改进的自组织神经网络的研究(边缘特征) 64 65 66 67 68 69 70 71
手机遥控音乐播放器 传感器网络虚拟MIMO传输仿真 传感器网络用于数字航道观测的可视化模拟 认知中继传输系统误码性能仿真 IS-95系统通信链路的MATLAB仿真与实现 (3,1,9)卷积码编译码器的MATLAB实现 QPSK调制解调的DSP实现 QPSK调制解调系统的MATLAB实现
家庭电能检测控制器设计 体效应感应报警系统设计 双向语音应答楼宇电动门锁控制装置设计 微型高效DC/DC开关电源模块设计 E1码流旁路在线式误码检测仪设计 非接触式汽油发动机点火状态测试仪设计 多调制模式可变频率射频信号发生器设计 遥控的模拟多信道选择器设计
基于左手材料的小型化天线 高增益小型化全向天线 微波无线供电系统设计 正交频分复用调制电路设计 QPSK调制解调电路设计 基于USB接口的FPGA下载器设计 全数字PLL设计 全数字调频接收电路设计 Cordic算法的FPGA实现 基于FPGA的8051单片机设计 正交频分复用解调电路设计
基于射频芯片防盗报警器的设计 基于射频芯片的电子称设计 遥控电子开关器的设计 PC温度监控系统设计 基于单片机的函数信号发生器设计 单片机数控直流电源的设计 手持式数据采集器的设计 无线温度监控系统设计 基于无线通信的脉搏监测系统 基于串口的两路数据采集 基于USB的数据采集 脉搏波形采集与存储系统 基于单片机的信号发生器设计 基于DSP的卷积码设计 基于DSP的OFDM调制解调验证 基于DSP的信道估计与均衡
职 称
出题面向专业
学生学号
Simulink仿真平台及通信模块简介

常见问题与解决方案
模块兼容性问题
在使用Simulink通信模块时,可能会遇 到模块兼容性问题。例如,某些模块可 能无法与其他模块正确连接或出现错误 。此时需要检查模块的兼容性和连接方 式,确保模块之间的正确连接。
发展
随着技术的不断进步和应用需求的不断增长,Simulink也在不断更新和扩展,支持更多的算法和工具箱,满足不 同领域的需求。
02
Simulink通信模块介绍
信号源模块
信号源模块
产生模拟或数字信号,作为通信系统的输入。
信号源分类
正弦波、方波、三角波等。
应用场景
用于测试和验证通信系统的性能。
参数设置
物理层协议
Simulink支持多种物理层协议, 如以太网协议、光纤通信协议等, 可以模拟不同协议下的信号传输 性能。
数据链路层协议
Simulink支持多种数据链路层协 议,如PPP协议、HDLC协议等, 可以模拟不同协议下的数据链路 层行为。
卫星通信系统仿真
卫星轨道和运动
Simulink支持多种卫星轨道和运动模型,如地球同步轨道、 太阳同步轨道等,可以模拟不同轨道和运动下的卫星信号 传输特性。
卫星信道建模
Simulink支持多种卫星信道模型,如自由空间传播信道、 大气衰减信道等,可以模拟不同环境下的卫星信号传播特 性。
卫星通信协议
Simulink支持多种卫星通信协议,如DVB-S2协议、 COFDM协议等,可以模拟不同协议下的卫星信号传输性 能。
物联网通信系统仿真
传感器网络建模
Simulink支持多种传感器网络模型,如无线传感器网络、有源传感器网络等,可以模拟不 同传感器网络下的信号传输特性。
基于 MATLAB/GUI 的过程控制仿真实验系统设计
基于 MATLAB/GUI 的过程控制仿真实验系统设计王红梅;张厚升;邢雪宁【摘要】为使学生更好地理解控制系统的结构及其特点,设计了基于MATLAB/GUI的过程控制仿真实验系统。
仿真系统借助GUIDE良好的界面管理,分层次设计了液位单回路控制、加热炉温度串级控制、锅炉汽包水位控制等八个子实验。
每个实验界面可进行参数设置、仿真结果显示、重要信息提示。
后台程序采用MALTAB 的m 文件或 Simulink实现。
该系统知识全面、内容设计合理、界面友好、使用简单、可操作性强。
%In order to make students better understand the structure and characteristics of the process control system ,the process control simulation system based on MATLAB/GUI was de‐signed .With the help of a GUIDE good interface management ,the simulation system hierarchical designs eight children experiment .For example ,liquid level single loop control ,furnace tempera‐ture cascade control and boiler drum water level control .Each experiment has the same charac‐ters:parameters can be set ,simulation results can be shown ,important messages are pointed out .Daemons use MALTAB m file or Simulink .This system has the characteristics of compre‐hensive knowledge ,reasonable content design ,friendly interface ,simple use ,and strong maneu‐verability .【期刊名称】《山东理工大学学报(自然科学版)》【年(卷),期】2015(000)006【总页数】3页(P58-60)【关键词】过程控制;MATLAB/GUI;仿真实验【作者】王红梅;张厚升;邢雪宁【作者单位】山东理工大学电气与电子工程学院,山东淄博255049;山东理工大学电气与电子工程学院,山东淄博255049;山东理工大学电气与电子工程学院,山东淄博255049【正文语种】中文【中图分类】TP373过程控制课程是自动化学科的主干专业课程,该课程理论性和实用性都很强.目前课程的体系结构主要是授课加实验的模式.通过对学生实验情况的观察,发现学生不能把课程知识和实验很好的结合,对系统的结构特点理解欠佳,致使做实验时一知半解,影响实验效果.鉴于此,本文开发的基于MATLAB/GUI的仿真实验系统重点弥补以上缺憾.一方面,借助MALTAB友好的界面显示特点使学生对理论知识有更直观的理解,另一方面,通过对仿真系统的构造加强对系统结构的认知,为今后在过程控制实验装置上进行实验打下基础.与传统实验装置相比,该仿真实验系统不需要传感器、变送器、执行器等实验装置,仅需有安装MATLAB软件的计算机就可进行实验,不受场地和时间的限制,实验投入少,实验成本低,而且可开放性强.过程控制课程主要包含三个核心内容:1)各种形式的系统结构,比如,单回路、串级系统、前馈-反馈系统等,应该重点掌握各结构的组成、特点及应用场合.2)理论分析,通过理论分析进一步验证系统的结构特点.3)参数整定,可按照一定的整定步骤,实现参数的最优化[1-2].为了使学生对以上内容有更好的掌握,仿真系统设计的总体思路是借助MATLAB/GUI仿真工具,直观、简洁的展示抽象的理论知识,借助MATLAB/Simulink,系统、全面的反映过程控制系统的结构特点和参数整定.本仿真系统考虑教学内容和学生的认知规律,由简入难,逐层的设计各实验.实验系统总体分为:简单系统、高性能系统、特殊系统、复杂系统四部分,每个系统下面又有相应的子实验.同时,子实验的实例选取特别注意和实际应用相结合.系统的整体结构如图1所示.MATLAB的GUI为用户提供了设计良好的人机交互界面的工具,通过它可以更好的管理程序,使操作变的更为简单、便捷.GUIDE界面中提供了按钮、列表框、复选框、文本框、滑块、坐标系、菜单等控件.界面生成过程主要包括界面设计和程序实现,具体步骤如下:1) 明确系统功能后,通过合理布置控件,制作友好的静态界面.2) 按一致性原则对各控件的属性进行设置.3) 根据功能要求,编写各控件的回调函数.4) 系统测试运行.2.1 统主界面设计的仿真系统的主界面主要实现两个功能:1)展示实验的整体内容;2)通过相应的控件进入到子实验.为此,设计了如图2所示的主界面.四个Panel控件用于区分四个不同种类的子实验,每个Panel里放有两个控件用于进入不同的子实验.每个Pushbutton的回调函数均完成执行关闭主界面并打开相应子实验界面功能.整个主界面力求做到设计简洁,层次清晰,使用方便.2.2 子实验界面当在主界面选择了子实验后,系统进入相应的实验.本系统共包括8个子实验,界面设计主要分为三个区域:1)参数设置区,该部分主要实现操作人员对系统参数的设置;2)显示区,将仿真结果以图形化的方式进行显示;3)子实验的仿真结构图及其它信息显示区,该区便于操作人员了解子实验系统的构成.本文以PID参数作用分析子实验及前馈—反馈子实验分别进行说明.PID参数作用分析子实验是通过分析系统的阶跃响应随某一参数的变化趋势,来更好的理解各参数的作用[3].这样界面操作中就需要能输入不同数值的比例系数、积分系数、微分系数,并将阶跃仿真结果进行显示.设计的PID参数作用分析子实验界面如图3所示.PID参数作用分析子实验GUI界面右边区域可以根据需要利用Edit控件设定比例、积分、微分系数,每个参数的意义及可变化的维数利用Text控件说明.参数设置完毕后点击相应的“开始仿真”按钮,则后台仿真程序运行,完毕后在左边的显示区域显示系统随参数变化的阶跃响应曲线.图3显示的是比例系数Kp从0.5变化到1.5时的系统阶跃响应曲线.界面中还提供了仿真中的重要信息——被控对象数学模型.当实验结束后可通过“返回”按钮回到图2系统主界面,继续进行其它子实验.本界面很关键的一点就是编写“开始仿真”按钮的回调函数.首先需要获取界面中用户在Edit控件输入的比例、积分或微分参数;然后将参数由字符型转化成数值型用于阶跃响应分析.前馈—反馈控制仿真实验是以工业中常用的换热器出口温度控制为例[4],其中被加热液体的流量变化比较剧烈,采用前馈对该干扰进行补偿.该实验通过比较前馈-反馈控制与反馈控制的阶跃响应曲线的性能区别来体现前馈控制的作用.干扰信号取脉冲干扰和随机干扰两种形式,可通过界面中的按钮来进行选择.设计的前馈—反馈控制子实验界面如图4所示.在进行实验前,需先将前馈—反馈MATLAB/Simulink仿真程序中的手动开关打到相应的位置.Simulink仿真程序中的Manual Swith用于选择是否加入干扰,Manual Swith1用于选择干扰类型,Manual Swith2用于选择是否进行前馈补偿.界面中所有控件的回调函数都可以看到,学生一方面可以学习如何编写代码,另一方面可以根据需要对界面进行改进,更进一步还可以设计新的功能界面,这也是MATLAB的优势所在.子实验的运行都是通过后台的MATLAB的m文件或Simulink程序来实现.MATLAB/Simulink在编程方面尤其简便,通过选取相应的模块并连接,则能构建仿真系统.而且Simulink除了丰富的工具箱,还提供了用户自定义模块,方便用户使用.本文以基于MATLAB/Simulink的串级控制仿真程序为例进行介绍.程序通过串级控制与单回路系统的比较,理解串级结构形式的改变带来的性能变化,再通过对一次干扰和二次干扰的抗干扰能力的仿真分析,学习串级系统的抗干扰特点.仿真实例取自实际应用中的反应釜加热炉温度控制系统[5],其中,加热炉温度为主变量,夹套温度为副变量的串级控制系统.构建的串级控制仿真系统结构如图5所示.程序中通过Manual Swith选择是单回路控制还是串级控制,Manual Swith1选择是否加入一次干扰,Manual Swith2选择是否加入二次干扰.将基于MATLAB/GUI的过程控制仿真实验系统应用于《过程控制》的教学,使学生直观的领会和理解该课程的各系统结构和理论知识,对调动学生的学习积极性以及提高学生的实验兴趣和实验能力都有相当的作用.一方面,学生通过MATLAB这一仿真平台,可以更快捷有效的编写仿真实验,其超强的计算能力和丰富的图形界面显示给知识的学习带来意想不到的效果;另一方面,教师可在授课时使用该软件进行理论知识的直观演示,增强知识的传授.同时,结合过程控制所学知识以及MATLAB软件,学生可自行根据需求将实验装置中没有的一些复杂控制系统通过仿真实验的形式加以实现,从而极大的培养学生学习能力.【相关文献】[1] 黄德先, 王景春, 金以慧. 过程控制系统[M]. 北京: 清华大学出版社, 2011.[2]潘永湘, 杨延西, 赵跃. 过程控制与自动化仪表[M]. 第二版. 北京:机械工业出版社, 2007[3]何佳佳, 候再恩. PID参数优化算法[J]. 化工自动化及仪表. 2010, 37(11): 1-4.[4]孙秀丽, 王培培. 前馈-反馈控制系统的具体分析及其MATLAB/Simulink仿真[J]. 中国集成电路, 2013(9), 54-58.[5]罗及红. 基于PID算法的炉窑温度串级控制系统设计[J]. 计算机测量与控制,2012, 20(12): 3243-3245.。
基于matlabsimulink的pid控制器设计
基于matlabsimulink的pid控制器设计1.引言1.1 概述概述部分:PID控制器是一种常用的控制算法,它通过不断地调整系统的输出来使其尽量接近所期望的目标值。
在工业控制领域,PID控制器被广泛应用于各种工艺过程和自动化系统中。
本文将以MATLAB/Simulink为工具,探讨基于PID控制器的设计方法。
PID控制器以其简单易实现、稳定性好的特点,成为许多控制系统的首选。
在文章的正文部分,我们将对PID控制器的基本原理进行详细介绍,并结合MATLAB/Simulink的应用,展示如何使用这一工具来设计和实现PID控制器。
在控制系统设计中,PID控制器通过测量系统的误差,即期望输出值与实际输出值之间的差异,并根据三个控制参数:比例项(Proportional)、积分项(Integral)和微分项(Derivative)来调整系统的输出。
比例项控制系统的响应速度,积分项消除系统的稳态误差,微分项抑制系统的震荡。
MATLAB/Simulink作为一款功能强大的仿真软件,提供了丰富的控制系统设计工具。
它不仅可以帮助我们直观地理解PID控制器的工作原理,还可以实时地模拟和分析系统的响应。
通过使用MATLAB/Simulink,我们可以轻松地进行PID控制器参数调整、系统性能评估和控制算法的优化。
总之,本文旨在介绍基于MATLAB/Simulink的PID控制器设计方法,通过理论介绍和实例演示,帮助读者深入理解PID控制器的原理和应用,并为读者在实际工程项目中设计和实施PID控制器提供参考。
在结论部分,我们将总结所得结论,并对未来进一步研究的方向进行展望。
文章结构部分的内容可以描述文章的整体架构和各个部分的内容大纲。
以下是对文章1.2部分的内容补充:1.2 文章结构本文主要由以下几个部分构成:第一部分是引言部分,包括概述、文章结构和目的等内容。
在概述中,将简要介绍PID控制器在自动控制领域的重要性和应用背景。
基于Matlab的网络控制系统仿真平台

孙 君 曼
( 州轻 工业 学 院电 气信 息 工程 学院 河 南 郑 ,
邓 纬
李荔 簿
互傻 在
4 50 ) 700
郑 州 40 0 ; 50 2 开封 空 分设备 集 团公 司 , 南 开封 河
摘
要 :为 了在不 同网络 情 况 下对 N S 能 进行 比较 , C性 并且 能 够 方便 控制 算 法 研究 , 立 了功 能完 善 的 网络 控制 系 统 ( C ) 台。 建 NS平
cn o ss m ( C ) l f i m rh n v nt n i et l h d T em i f tr a a / me i e r aa z , n C m - o t l yt N S p t r wt c p e s e u c o ss s bi e . h a a e o M t T Tm e n ye ada Ss u r e ao m h o e i f i a s ne u sf l b a l d N i
基 于 Malb的 网络 控制系统仿真 平 台 t a
孙君曼 , 等
基 于 M t b的 网络控制 系统仿 真平 台 aa l
M a lb b s d Si ua in PItO m orNe w ore n r l y t m t — a e m lt af r f t a o k d Co to s e S
lto d li sa l h db d pig tek r la dn t r d l fMalb r e i .Th to fh w o etb iht esmuae d lo ain mo e se tbi e y a o t h ene ewok mo ueo ta /T u T me s n n emeh do o t sa ls h i ltd mo e f NC a e n Tre i ewok smuain e vrn n sito c d i eal n h r be c u r d i ewok ta s sin aer sa c e S b s d o u T me n t r i lto n io me ti nr d e n d ti,a dt ep o lmso c re n n t r r n miso e e rh d r b x rme t n n lz d c mp e e sv l y e p i nsa d a ay e o rh n iey.T ee p rme t ftmed ly a d p c esls x rme t n NCS aea aye n d t l h e e — e h x e i nso i ea n a k t ose pei nsi n lz d i ea .T x r i
基于MWorks的移动通信系统仿真可行性与性能分析

基于MWorks的移动通信系统仿真可行性与性能分析第一章移动通信系统概述随着科技的不断发展,移动通信系统已经成为现代社会中不可或缺的一部分。
本章将对移动通信系统进行概述,包括其定义、发展历程、关键技术和应用领域等方面。
移动通信系统(Mobile Communications System,简称MCS)是一种利用无线电波在空中传输信息的技术,使得用户可以在不同地点之间进行语音、数据、图像等信息的实时交流。
移动通信系统主要包括基站子系统(Base Station Subsystem,简称BSS)、核心网络子系统(Core Network Subsystem,简称CNSS)和终端设备子系统(Terminal Equipment Subsystem,简称TES)。
基站子系统负责与终端设备子系统之间的无线连接,核心网络子系统负责处理和管理整个系统的信令、计费、资源分配等功能。
移动通信系统的发展可以追溯到20世纪70年代末和80年代初,当时主要采用模拟技术进行通信。
随着数字技术的发展,尤其是码分多址(Code Division Multiple Access,CDMA)技术的引入,移动通信系统开始进入数字时代。
21世纪初,随着移动互联网的兴起,移动通信系统又进入了一个新的发展阶段,各种新的技术和应用层出不穷,如4G、5G、物联网等。
频谱资源管理:合理分配和利用无线电频谱资源,以满足不同业务需求和覆盖范围的要求。
信道编码与调制:通过信道编码技术提高信号抗干扰能力,实现高效、稳定的数据传输;通过调制技术将信息信号转换为适合无线传输的电磁波信号。
1多址与冲突检测:采用多址分配技术(如随机接入、时分多址等)实现多个用户同时接入;通过信道估计、空时分组码等技术检测和避免信道冲突。
功率控制与节能:通过动态调整发射功率,实现能量的有效利用,降低能耗。
网络优化:通过统计分析、预测算法等手段对网络性能进行实时监控和优化,提高网络质量和用户体验。
基于Matlab的运动控制系统实验平台设计
收 稿 日 期 "#"% #$ #*$! 修 回 日 期 "#"% #( &"% 基 金 项 目 国 家 自 然 科 学 基 金 项 目!,&%'$&#%"$浙 江 省 高 等 教 育,十 三 五-第 二 批 教 学 改 革 项 目!+E"#&)##'*"% 作 者 简 介 徐 建 明!&)'# "&男 &博 士 &教 授 % 引 用 格 式 徐 建 明 &支 文 龙 &周 家 豪 !基 于 =H6IHW的 运 动 控 制 系 统 实 验 平 台 设 计'+(!计 算 机 测 量 与 控 制 &"#"$&%"!%")&$, &("!
计与计算$后者侧重仿真&结果会偏于理想化% 针对运动控制系统课程实验平台的不足&国内外对于
运动控制 系 统 课 程 实 验 平 台 设 计 的 研 究 也 有 不 少%文 献 '%(介绍了 一 种 基 于 8=;%"#["*&"-;^ 的 低 成 本 电 机 控 制测试台%文献 '$(介绍了一 种 用 于 设 计 和 实 现 嵌 入 式 控 制软件的实验 平 台% 文 献 '(( 将 =H6IHW+;4OGI423 和 ;4O5 9JVAN;PL6AOL工具箱引入到 了 运 动 控 制 系 统 课 程 的 实 验 教 学中%文献 ',( 介 绍 了 将 =H6IHW+;4OGI423 仿 真 与 实 际 硬 件设备控制相结合的实验平台%文 献 ''( 从 运 动 控 制 系 统 课程特点和实践环节各类实验的特点分析入手来建设实验 平台%文献 '*(介绍了一 种 新 型 的 快 速 控 制 原 型 系 统& 该 系统将控制类课程仿真与动手实践相结合&学生通过该系 统可以专注于控制系统设计*仿真和实验控制验证&而不 是单纯编程%文献 ')(介绍了 一 种 永 磁 同 步 电 机 控 制 系 统 的实验平台&该平台实现了仿真和硬件平台控制的结合%
基于MATLAB_GUI的自动控制原理仿真实验平台设计
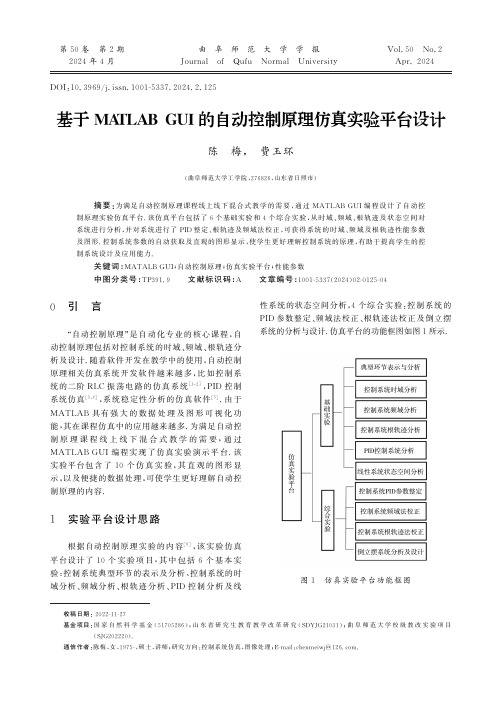
D O I :10.3969/j.i s s n .1001-5337.2024.2.125 收稿日期:2022-11-27基金项目:国家自然科学基金(51705286);山东省研究生教育教学改革研究(S D Y J G 21031);曲阜师范大学校级教改实验项目(S J G 202220).通信作者:陈梅,女,1975-,硕士,讲师;研究方向:控制系统仿真,图像处理;E -m a i l :c h e n m e i w j@126.c o m.基于M A T L A B G U I 的自动控制原理仿真实验平台设计陈 梅, 费玉环(曲阜师范大学工学院,276826,山东省日照市) 摘要:为满足自动控制原理课程线上线下混合式教学的需要,通过MA T L A B G U I 编程设计了自动控制原理实验仿真平台.该仿真平台包括了6个基础实验和4个综合实验,从时域㊁频域㊁根轨迹及状态空间对系统进行分析,并对系统进行了P I D 整定㊁根轨迹及频域法校正,可获得系统的时域㊁频域及根轨迹性能参数及图形.控制系统参数的自动获取及直观的图形显示,使学生更好理解控制系统的原理,有助于提高学生的控制系统设计及应用能力.关键词:MA T A L B G U I;自动控制原理;仿真实验平台;性能参数中图分类号:T P 391.9 文献标识码:A 文章编号:1001-5337(2024)02-0125-040 引 言自动控制原理 是自动化专业的核心课程,自动控制原理包括对控制系统的时域㊁频域㊁根轨迹分析及设计.随着软件开发在教学中的使用,自动控制原理相关仿真系统开发软件越来越多,比如控制系统的二阶R L C 振荡电路的仿真系统[1,2],P I D 控制系统仿真[3,4],系统稳定性分析的仿真软件[5].由于MA T L A B 具有强大的数据处理及图形可视化功能,其在课程仿真中的应用越来越多.为满足自动控制原理课程线上线下混合式教学的需要,通过MA T L A B G U I 编程实现了仿真实验演示平台.该实验平台包含了10个仿真实验,其直观的图形显示,以及便捷的数据处理,可使学生更好理解自动控制原理的内容.1 实验平台设计思路根据自动控制原理实验的内容[6],该实验仿真平台设计了10个实验项目,其中包括6个基本实验:控制系统典型环节的表示及分析㊁控制系统的时域分析㊁频域分析㊁根轨迹分析㊁P I D 控制分析及线性系统的状态空间分析,4个综合实验:控制系统的P I D 参数整定㊁频域法校正㊁根轨迹法校正及倒立摆系统的分析与设计.仿真平台的功能框图如图1所示.图1 仿真实验平台功能框图第50卷 第2期2024年4月 曲阜师范大学学报J o u r n a l o f Q u f u N o r m a l U n i v e r s i t yV o l .50 N o .2A p r .2024(1)控制系统典型环节表示与分析.典型环节主要包括比例环节㊁积分环节㊁一阶惯性环节㊁实际微分环节㊁二阶振荡环节及延迟环节6种.该实验实现了典型控制系统的数学模型表示,并绘制了各系统的单位阶跃响应曲线,同时对系统性能进行了分析.(2)控制系统的时域分析.该实验让学生了解不同输入信号下的系统响应曲线,并掌握单位阶跃响应的动态性能指标.输入信号包括单位阶跃㊁单位脉冲㊁单位斜坡㊁单位加速度㊁及正弦信号,动态性能指标包括上升时间t r㊁峰值时间t p㊁超调量σ㊁调节时间t s及稳态误差e s s.(3)控制系统的频域分析.该实验主要包括系统频域图形绘制及频域参数求解.频域图形包括B o d e 图㊁N y q u i s t图及N i c h o l s曲线,系统频域参数包括增益裕量G m㊁相角裕量P m㊁穿越频率ωc g及剪切频率ωc p.(4)控制系统的根轨迹分析.该实验包括系统根轨迹绘制,以及求解系统的临界开环增益K及稳定增益范围.(5)P I D控制系统分析.该实验可以设置不同P I D参数,通过单位阶跃响应曲线及动态性能指标,使学生掌握P㊁P I㊁P I D等不同控制及参数,对系统性能的影响.(6)线性系统的状态空间分析.该实验可以对线性系统可观可控分析;确定系统极点配置的状态反馈矩阵及反馈系统;确定状态观测器反馈矩阵及状态观测器设计.(7)控制系统的P I D参数整定.该实验让学生掌握临界比例度法及4ʒ1衰减曲线法2种常用的P I D参数整定方法,以及P㊁P I及P I D控制参数的求解.(8)控制系统的频域法校正.频域法校正包括超前㊁滞后㊁滞后超前3种校正方法.通过设置需要校正的参数静态误差系数K v㊁相角裕度γ及剪切频率ωc,来确定校正器的参数,并通过校正前㊁后的时域及频域参数来验证校正后系统性能的改善.(9)控制系统的根轨迹法校正.根轨迹校正包括超前㊁滞后㊁超前滞后3种校正方式.通过设置时域参数超调量σ及调节时t s;或频域参数阻尼比ζ及角频率ωn,来确定校正系统的参数,并通过校正前后的时域参数对比来验证校正后系统性能是否满足要求.(10)倒立摆系统的分析与设计.该实验让学生了解倒立摆系统的工作原理,以及对倒立摆的控制.通过设置倒立摆参数,可以确定状态方程及输出方程,并通过极点配置及P I D参数整定对系统进行控制.该仿真实验平台的界面的设计及功能编程是通过MA T L A B G U I设计实现的.界面的设计通过G U I D E图形用户接口开发环境实现[7].在MA T-L A B2018的命令窗口中键入 g u i d e 打开G U I D E,通过添加控件分别设计各界面,界面设计的文件名扩展名为.f i g;然后编辑对应的M文件,通过各界面控件的C a l l b a c k函数实现控件的功能.2实验平台的功能实现2.1仿真系统界面设计该仿真系统包括1个主界面和10个子界面,主界面中主要包括10个按钮,用来显示各实验子界面.下面以 控制系统根轨迹校正 实验为例说明各子界面的设计过程.根轨迹校正实验子界面中主要包括系统参数设置㊁校正参数设置㊁校正系统获取㊁系统性能参数的求解㊁校正前后根轨迹及单位阶跃响应曲线的绘制5个模块.仿真界面通过MA T L A B G U I设计,通过添加各控件实现,界面设计如图2所示.图2根轨迹法校正界面2.2实验平台功能实现2.2.1系统参数设置控制系统参数设置形式为传递函数形式,通过在编辑框中输入分子n u m㊁分母d e n参数实现.使用g e t函数获取编辑框中的字符串,并通过s t r2n u m函数将字符串转换为数值,最后通过t f函数得到系统传递函数.621曲阜师范大学学报(自然科学版)2024年2.2.2校正参数设置根据根轨迹法校正设计要求[8],系统校正的参数设置包括静态误差系数K v㊁时域参数超调量σ和调节时间t s㊁频域参数阻尼比ζ和角频率ωn.设置时域参数或频率参数的选择通过单选按钮实现,两种形式的参数可以相互转换,主要实现代码如下.i f(g e t(h a n d l e s.r a d i o t i m e,'V a l u e'))%时域参数z e t e=((l o g(1/s i g m a))^2/((p i)^2+(l o g(1/ s i g m a))^2))^(1/2)%ζw n=3.5/(z e t e*t s)%ωne l s e%频域参数s i g m a=e x p(-p i*z e t e/s q r t(1-z e t e*z e t e)) *100t s=3.5/(z e t e*w n)2.2.3校正器参数根轨迹法校正包括超前㊁滞后㊁超前滞后3种校正方式,通过按钮实现选择,超前校正实现代码如下. k c=k v/n u m*d e n(l e n-1);g=p o l y v a l(n u m,s1)/p o l y v a l(d e n,s1);t h e t a_G=a n g l e(g);t h e t a_s=a n g l e(s1);MG=a b s(g);M s=a b s(s1);T z=(s i n(t h e t a_s)-k c*MG*s i n(t h e t a_G-t h e t a_s))/(k c*MG*M s*s i n(t h e t a_G))T p=-(k c*MG*s i n(t h e t a_s)+s i n(t h e t a_G +t h e t a_s))/(M s*s i n(t h e t a_G))G c1=t f([T z,1],[T p,1])%超前2.2.4校正系统动态性能参数校正后的系统开环传递函数是由原系统的开环传递函数G0(s)与校正器的传递函数G c(s)串联组成[9].为了验证校正系统是否满足要求,需要确定校正前后系统的性能参数,包括超调量σ㊁上升时间t r㊁调节时间t s,主要实现代码如下.[y,t]=s t e p(G G c);[m a x_y,k]=m a x(y);C=d c g a i n(G G c);m a x_o v e r s h o o t=(m a x_y-C)/C*100;s=l e n g t h(t);w h i l e y(s)>0.95*C&&y(s)<1.05*Ce n ds=s-1;t s=t(s)%调节时间2.2.5仿真曲线绘制为了更直观地比较系统校正前后的性能,绘制了其对应的单位阶跃响应曲线及根轨迹.使用s t e p 函数绘制单位阶跃响应曲线,使用r l o c u s函数绘制根轨迹曲线,坐标轴控件的设置通过a x e s函数实现. 3实验平台测试通过实例对实验平台的各项功能进行了测试.例控制系统的开环传递函数G(s)=8s2+0.4s,通过根轨迹校正,使系统满足静态误差系数为4,超调量为30%,调节时间为3.5s.根据校正要求,首先进行系统参数设置,输入分子n u m为8,分母d e n为[1,0.4,0].设置校正参数静态误差系数K v为4,选择时域参数单选按钮,并输入超调量σ为30,调节时间t s为3.5s.选择校正按钮后,系统开始校正,将求解的校正器参数及系统性能参数显示到对应的编辑框中.选择 超前校正 按钮,求得校正系统的传递函数为G C(s)=2.73s+10.51s+1,校正后的超调量为30%,上升时间为0.5s,调节时间为2.76s,满足设计要求.选择 滞后校正 按钮,求得校正系统的传递函数为G C(s)=0.215s+0.00215s+0.00215,校正后的超调量为60%,上升时间为0.94s,调节时间为13.4s,超调量及调节设计均不满足设计要求,不采用该校正方式.选择 超前滞后 校正按钮,求得校正系统的传递函数为G C(s)=0.49s+0.20.5s+1㊃0.66s+0.0066s+0.00656,校正后的超调量为21.8%,上升时间为0.69s,调节时间为2.3s,满足设计要求.超前滞后校正前后单位阶跃响应响应曲线如图3所示,根轨迹下页如图4所示.图3超前滞后校正前后单位阶跃响应曲线721第2期陈梅,等:基于MA T L A B G U I的自动控制原理仿真实验平台设计图4 超前滞后校正前后根轨迹4 结 论通过MA T L A B G U I 设计了自动控制原理实验仿真平台,实现了控制系统分析中的10个典型实验.该仿真系统数据获取方便,并且直观的图形显示有助于学生加深对控制系统的理解.教学实践表明,该实验平台操作方便,功能设计齐全,可用于自动控制原理课程的线下课堂演示教学和线上实验教学,使学生更牢固地掌握知识,同时有助于提高学生的编程设计能力和问题解决能力.参考文献:[1]马壮.基于M a t l a b 的典型二阶R L C 振荡电路实验教学仿真[J ].实验室研究与探索,2016,35(10):95-98.[2]王晨丰,赵鹏.基于M A T L A B L T I V i e w e r 工具箱的二阶系统阶跃响应分析[J ].电子测试,2020(8):57-59.[3]陈梅,王健.基于MA T L A B G U I 的P I D 控制仿真系统设计[J ].实验技术与管理,2020,28(2):140-143.[4]张婧,盖文东,徐文尚,等.基于M a t l a b 的P I D 控制器参数整定方法[J ].实验科学与技术,2016,14(4):37-40.[5]闫红梅,张鸣,李远征,等.基于M a t l a b 的系统稳定性分析实验设计[J ].实验技术与管理,2018,35(4):144-146.[6]胡寿松.自动控制原理[M ].6版.北京:科学出版社,2016.[7]张贤明.MA T L A B 语言及应用案例[M ].南京:东南大学出版社,2010.[8]王正林,王胜开,陈国顺,等.MA T L A B /S i m u l i n k 与控制系统仿真[M ].北京:电子工业出版社,2008.[9]张德丰.MA T L A B 控制系统设计与仿真[M ].北京:电子工业出版社,2009.D e s i g n o f a u t o m a t i c c o n t r o l p r i n c i p l e s i m u l a t i o n e x pe r i m e n t p l a tf o r m b a s e d o n M A T L A B G U IC H E N M e i , F E I Y u h u a n(C o l l e g e o f E n g i n e e r i n g ,Q u f u N o r m a l U n v e r s i t y ,276826,R i z h a o ,S h a n d o n g,P R C )A b s t r a c t :T o m e e t t h e n e e d s o f b l e n d e d o n l i n e a n d o f f l i n e t e a c h i n g o f a u t o m a t i c c o n t r o l p r i n c i pl e s ,t h e s i m u l a t i o n e x p e r i m e n t p l a t f o r m o f a u t o m a t i c c o n t r o l p r i n c i p l e i s d e s i g n e d t h r o u gh MA T L A B G U I p r o -g r a mm i n g .T h e s i m u l a t i o n p l a t f o r m i n c l u d e s 6b a s i c e x p e r i m e n t s a n d 4c o m p r e h e n s i v e e x p e r i m e n t s .I t a n -a l y z e s t h e s y s t e m f r o m t i m e d o m a i n ,f r e q u e n c y d o m a i n ,r o o t l o c u s a n d s t a t e s pa c e ,a n d c o n d u c t s P I D t u n -i n g ,r o o t l o c u s a n d f r e q u e n c y d o m a i n c o r r e c t i o n f o r t h e s y s t e m.T h e t i m e d o m a i n ,f r e q u e n c y do m a i n a n d r o o t l o c u s p e r f o r m a n c e p a r a m e t e r s a n d g r a p h s o f t h e s y s t e m c a n b e o b t a i n e d .T h e a u t o m a t i c a c q u i s i t i o n o f c o n t r o l s y s t e m p a r a m e t e r s a n d v i s u a l g r a p h i c d i s p l a y c o u l d h e l p s t u d e n t s t o b e t t e r u n d e r s t a n d t h e p r i n c i pl e o f t h e c o n t r o l s y s t e m ,e n h a n c e s t u d e n t s c o n t r o l s y s t e m d e s i g n a n d a p p l i c a t i o n a b i l i t y,a n d m e e t t h e r e -q u i r e m e n t s o f e x p e r i m e n t a l t e a c h i n g o b je c t i v e s .K e y wo r d s :MA T L A B G U I ;a u t o m a t i c c o n t r o l p r i n c i p l e ;s i m u l a t i o n e x p e r i m e n t p l a t f o r m ;p e r f o r m -a n c e p a r a m e t e r821 曲阜师范大学学报(自然科学版) 2024年。
自动控制原理试题2015分解
2006-2007(A)一、填空题(每空2分,共10分)1.用三个字来概括概括对控制系统的基本要求是。
2.偶极子指的是。
3.扰动作用下的稳态误差取决于及主反馈通道中的积分环节数目与增益。
4.滞后校正是通过牺牲来换取稳定裕度的增加。
5.上升时间反映了系统能力。
二、选择题(每小题2分,共10分)1.建立系统多项式模型的函数是()A. zpkB. tfC. ssD. sos2. 关于开环放大倍数对系统性能的影响,错误的是()A. 提高开环放大倍数,系统的快速性提高,稳定性增强;B. 开环放大倍数与开环相频特性无关;C. 提高开环放大倍数,能够提高系统的稳态精度;D. 开环放大倍数等于0型系统的静态位置误差系数。
3. 控制系统结构如图所示,则系统属于()A. 开环控制B. 反馈控制C. 按给定补偿D. 按扰动补偿4.以下不属于非线性系统特点的是()A. 满足叠加性B. 存在自激振荡C.有多个平衡点D. 频率响应会畸变5.设系统开环传递函数为2(3)(1)(0.51)ss s s+++,则开环放大倍数为()A. ∞;B. 6;C. 12;D. 2三、判断题(每小题2分,共10分)1.为保证系统具有足够的稳定裕度,中频段应有足够的宽度。
( )2.闭环极点越远离虚轴,对应的响应分量结束得越早。
( )3.引入测速反馈后,可以增大系统的阻尼,改善稳定性,但会使稳态精度下降。
( )4.对于最小相位系统,稳定的充要条件是奈氏曲线中正负穿越次数之差为零。
( )5.劳斯判据是近似求解系统的闭环极点的作图方法。
( ) 四、求下列两图所示示系统的传递函数。
其中,T=1s ,K=1。
(12分,每图6分)⨯⨯⨯)(s R )(s C )(1s G )(2s G )(3s G )(4s G )(2s H )(1s H )(3s H ---+1Tse s--(1)Ks s +)(s R )(s C -T五、已知系统开环传递函数为100(2)()()(1)(20)s G s H s s s s +=++,试绘制渐近对数幅频特性曲线,并求截止频率与相角裕度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
控制系统的各组成部分由 TrueTime Kernel模块 构成 ,数据的传递或监控系统的运行由 8 个接口来完 成 ,具有简单灵活的实时内核以及网络接口 、外部通 道 、A /D 和 D /A 转换器接口等 。控制系统信息传递的 网络环境可利用 TrueTime Network 模块达到要求 , 其 主要功能包括灵活使用多种调度策略 ;可设置传输速 率 、媒体访问控制协议 、网络节点数等网络参数 ; 可根 据设定的网络模型模拟数据的接收与发送 ;当模块被 触发时 ,可执行相应的功能 。
网络节点由 TrueTime Network 构建 ,模块内可方 便地设定网络速度 、传输控制协议以及许多其他的网 络模型参数 ,并按照选定的网络模型模拟数据的接收 与发送情况 。
接收 /发送的信息包括接收方和发送方主机节点 的信息和用户定义的数据 (通常是控制信号或测量信 号 ) 、信息总长度和实时属性参数 (如优先权 、截止时 间等 ) 。在仿真环境下 ,当一条信息传输完成后 ,其将 被存储在目的主机节点的缓冲区 ,并以中断的形式通 知目的主机 。
修改稿收到日期 : 2009 - 08 - 14。 第一作者孙君曼 ,女 , 1969年生 , 2002 年毕业于华中科技大学控制 理论与控制工程专业 ,获硕士学位 , 副教授 ;主要从事网络化控制系统方 面的研究 。
《自动化仪表 》第 31卷第 3期 2010年 3月
基于 Matlab开发的系统仿真工具 TrueTime 能够 为 NCS仿真提供网络实验环境 、基本结构和良好的物 理系统接口 ,并能够按照 Matlab 的方式调用代码 ,执 行性好 。本文利用 Matlab / TrueTime 提供的 TrueTime Kernel、TrueTime Network模块 ,构建了 NCS仿真模型 。 网络控制系统结构如图 1所示 。
图 1 网络控制系统结构框图 Fig. 1 Structure of NCS
控制器采用 P ID 算法 ,受控对象为线性二阶系统 , 执行器和传感器均为事件驱动 ,网络协议采用 CSMA / CD ( Ethemet) 。通过逐渐加深时延程度和依次增大丢 包量来得到具体的仿真实验数据 ,并分析网络特性对 控制系统性能的影响程度 。以此实验平台为基础 ,可 对控制算法与网络调度等问题进行深入研究 。
(1)
式中
:
·
x
(
t)
为系统的
n ×1维状态向量 ; u ( t)为
r ×1维
控制向量 ; y ( t) 为 m ×1 维输出向量 ; A 为 n ×n 维 、B
为 n ×r维 、C 为 1 ×n维的矩阵 。
离散化后 ,系统的方程为 :
X ( k + 1) = <X ( k) +γu ( k)
(2)
节点 1产生干扰信号 ,主要是发送堵塞信号到网
20
PROCESS AUTOM AT IO N INSTRUM ENTAT IO N Vol131 No13 M arch 2010
基于 Matlab的网络控制系统仿真平台 孙君曼 ,等
络 ,堵塞信号优先在控制器节点执行 ,每个节点都有初 始化脚本和编码函数。 Interrup ts、A /D接口接地 ; Rcv用 来接收系统的信息 ,发送端 Schedule口用来监控系统的 资源分配情况 ,其他接口 D /A、Monitors、P等用于输出信 号的保存。该模块选用了库函数 ttsendm sg( ) 。 2. 5 网络模块
(郑州轻工业学院电气信息工程学院 1 ,河南 郑州 450002;开封空分设备集团公司 2 ,河南 开封 475000)
摘 要 : 为了在不同网络情况下对 NCS性能进行比较 ,并且能够方便控制算法研究 ,建立了功能完善的网络控制系统 (NCS)平台 。 对 Matlab / TrueTime主要特点进行了分析 ,并利用其核心模块和网络模块 ,建立了一种 NCS仿真模型 ;详细介绍了基于 TrueTime网络 仿真环境下 NCS仿真模型的构建方法 ,并针对网络传输中出现的问题进行了实验研究和全面分析 ,对 NCS的时延和丢包实验进行了 深入地分析 。实验结果表明该平台为 NCS研究提供了便捷的途径 。 关键词 : 网络控制系统 TrueTime 时延 丢包 Network模块 Kernel模块 中图分类号 : TP13 文献标志码 : A Abstract: To compare the performance of NCS under different network situations, and make the study of control algorithm s easier, the networked control system (NCS) p latform with comp rehensive functions is established. The main features ofMatlab / TrueTime are analyzed, and a NCS simu2 lation model is established by adop ting the kernel and network module ofMatlab / TrueTime. The method of how to establish the simulated model of NCS based on TrueTime network simulation environment is introdced in detail, and the p roblem s occurred in network transm ission are researched by experiments and analyzed comp rehensively. The experiments of time delay and packets loss experiments in NCS are analyzed in detail. The ex2 perimental result indicates that this p latform p rovides easy and rap id path of researching NCS. Keywords: Networked control system (NCS) TrueTime Time delay Packet lost Network module Kernel module
节点 4为传感器模块 ,用于检测受控对象 ,并通过 A /D 转换成数字信息 ,经传感器模块处理之后 ,以数 字量的方式发送给网络模块 ,再经该模块处理后发送 给控制器 。实验中 , Intermp ts、Rcv接地 , 发送端接口 D /A、Snd、Monitors和 P用于输出信号的保存 , Schedule 接口监控系统的资源分配情况 ,并利用 ttanalogin ( )和 ttsendm sg( ) 2 个库函数接收信息 ,并把处理后的信息 发送给系统的下一个节点 。 2. 4 干扰信号节点
节点 3为控制器 ,用于处理参考输入和传感器端 输入的信息 ,并发送结果到执行器节点 。将从网络中 得到的传感器端的输出信号与参考信息进行比较 ,得 到差值 ,再根据控制段设计的系统控制策略计算出控 制量 ,最后通过网络发送给执行结构 [3 - 4 ] 。
控制器由线性控制器 、TrueTime Kernel模块这 2 部分组成 。线性控制器用来处理传感器的信息 ( Rcv 端 ) ; TrueTime Kernel模块共包括 A /D、interrup ts和 rcv 这 3个输入端以及 D /A、Monitors、P、snd 和 Schedule 这 5个输出端 。接口输入信息由 A /D 端进入 ,控制器 因无中断所以 interrup ts端接地 , rcv接收的信息经控 制器处理后 ,由 snd 发送给系统的网络模块 , Schedule 用来监控系统的资源分配情况 。控制器节点使用库函 数 ttgetm sg( ) ,可以得到从网络上传来的传感器的信 息 ;使用 ttsendm sg( ) ,可以给下一个节点发送信息 。 2. 2 执行机构
2 网络控制系统模型的建立
网络控制系统的模型构成如图 2所示 。
图 2 网络控制系统的模型 Fig. 2 Model of etworked control system
这里的控制对象是一个二阶系统 ,状态方程为 :
·
x ( t) = A x ( t) + B u ( t)
y ( t) = C x ( t)
0 引言
1 网络控制系统结构
目前 ,在控制系统发展进程中 ,以 Internet为网络 环境的网络化控制系统 NCS ( networked control system ) 正逐渐成为研究的热点 。与传统的控制系 统 相比 , NCS主要工作在网络环境中 ,它是一种分布式实时控 制系统 。
NCS系统通过网络进行控制信息的传递 ,所以 ,在 关注控制系统结构的同时 ,更要研究网络传输的一些 重要因素及其对系统的性能影响程度 ,如数据传输单 包多包 、信息安全 、时延以及丢包等 ,这些都是 NCS系 统需要考虑的因素 。
TrueTime是一种基于 Matlab的实时控制与网络控 制仿真工具箱。该工具箱主要包括 TrueTime Kernel、