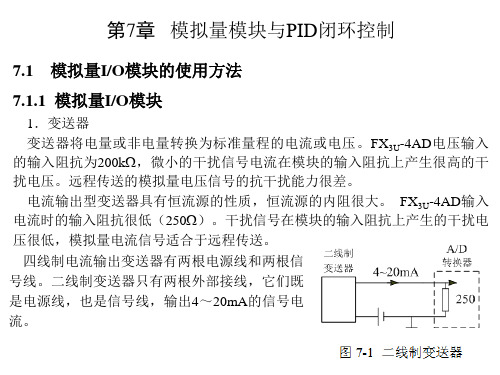
最新模拟量及PID
模块七PLC模拟量及PID控制课件

模拟量信号特点
连续变化,取值范围广泛,易受干扰影响。
PLC模拟量模块介绍
模拟量输入模块
将模拟量信号转换为数字信号,便于 PLC处理。
模拟量输出模块
将PLC输出的数字信号转换为模拟量 信号,控制外部设备。
模拟量输入电路原理与实践
电路原理
通过电阻、电容等元件对模拟量信号进行滤波、放大等处理 ,以保证信号的稳定性和精度。
要点三
衰减曲线法
先将比例度设置为一个较大值,然后 逐步减小比例度,同时加大积分时间 常数,使系统响应出现衰减振荡;此 时的比例度和积分时间常数即为合适 的PID参数;最后加入微分调节,提 高系统响应速度。
03
PLC实现PID控制策略
PLC内置PID功能介绍与设置
PID算法原理
介绍比例、积分、微分三环节的作用及调节规律, 以及PID控制参数的整定方法。
实时监控数据显示和报警功能实现
实时监控数据显示
通过触摸屏界面实时显示PLC采集到的模拟量数据,如温度、压力 、流量等,方便用户随时掌握设备运行状态。
数据曲线绘制
根据实时数据绘制相应的曲线图,可以更加直观地了解设备运行趋 势和历史数据变化情况。
报警功能实现
设定报警阈值,当实时数据超过或低于阈值时,触摸屏界面上显示 报警信息,并触发声光报警装置,提醒用户及时处理。
PID控制故障
PID调节失效,导致系统失控。原因可能包括参 数设置不当、传感器故障等。
故障排查方法和步骤总结
01
观察故障现象
通过查看PLC指示灯、监控画面等 信息,了解故障的具体表现。
03
制定排查方案
针对可能的原因,制定详细的排 查方案,包括检查电源、通信线
模拟量闭环控制一般用PID

模拟量闭环控制一般用PID。
需要较好的动态品质和较高的稳态精度时,可以选用PI控制方式;控制对象的惯性滞后较大时,应选择PID控制方式。
各部分的作用如下:
在P,I,D这三种控制作用中,比例部分与误差信号在时间上是一致的,只要误差一出现,比例部分就能及时地产生与误差成正比的调节作用,具有调节及时的特点。
比例系数KC越大,比例调节作用越强,系统的稳态精度越高;但是对于大多数系统,KC过大会使系统的输出量振荡加剧,稳定性降低。
控制器中的积分作用与当前误差的大小和误差的历史情况都有关系,只要误差不为零,控制器的输出就会因积分作用而不断变化,一直要到误差消失,系统处于稳定状态时,积分部分才不再变化,因此积分部分可以消除稳态误差,提高控制精度。
但是积分作用的动作缓慢,可能给系统的动态稳定性带来不良影响,因此很少单独使用。
积分时间常数TI增大时,积分作用减弱,系统的动态性能(稳定性)可能有所改善,但是消除稳态误差的速度减慢。
根据误差变化的速度(即误差的微分),微分部分提前给出较大的调节作用。
微分部分反映了系统变化的趋势,它较比例调节更为及时,所以微分部分具有超前和预测的特点。
微分时间常数增大时,超调量减小,动态性能得到改善,但是抑制高频干扰的能力下降。
实例详解S7-200SMART与PID的应用

实例详解S7-200SMART与PID的应用一、 PID回路控制概述PID控制器是应用最广泛的闭环控制器,它根据给定值与被控实测值之间的偏差;按照PID算法计算出控制器的输出量,控制执行机构进行调节,使被控量跟随给定量变化,并使系统达到稳定;自动消除各种干扰对控制过程的影响。
其中PID分别表示比例、积分和微分S7-200 SMART中PID功能实现方式有以下三种:PID指令块:通过一个PID回路表交换数据,只接受0.0 - 1.0之间的实数(实际上就是百分比)作为反馈、给定与控制输出的有效数值。
PID向导:方便地完成输入/输出信号转换/标准化处理。
PID指令同时会被自动调用。
根据PID算法自己编程S7-200 SMART CPU最多可以支持8个PID控制回路(8个PID 指令功能块),根据PID算法自己编程没有具体数目的限制,但是我们需要考虑PLC的存储空间以及扫描周期等影响。
PID控制是负反馈闭环控制,能够抑制系统闭环内的各种因素所引起的扰动,使反馈跟随给定变化。
PID控制算法有几个关键的参数Kc(Gain,增益)Ti(积分时间常数),Td(微分时间常数)Ts(采样时间)在S7-200 SMART中PID功能是通过PID指令功能块实现。
通过定时(按照采样时间)执行PID功能块,按照PID运算规律,根据当时的给定、反馈、比例-积分-微分数据,计算出控制量由于PID可以控制温度、压力等等许多对象,它们各自都是由工程量表示,因此有一种通用的数据表示方法才能被PID功能块识别。
S7-200 SMART中的PID功能使用占调节范围的百分比的方法抽象地表示被控对象的数值大小。
在实际工程中,这个调节范围往往被认为与被控对象(反馈)的测量范围(量程)一致。
PID 功能块只接受0.0 - 1.0之间的实数(实际上是0%--100%)作为反馈、给定与控制输出的有效数值,如果是直接使用PID功能块编程,必须保证数据在这个范围之内,否则会出错。
第七章--数字PID控制及其算法

式中:
KI
KP
T TI
KD
KP
TD T
增量控制算式
整理得:Yn KP KI KD en KP 2KD en 1 KDen 2
d0en d1en 1 d2en 2
式中:
d0
K
P
1
T TI
TD T
d1
KP
1
2TD T
一开始: 比例调节作用→比例输出Y1
随后: 积分作用→在同一方向,在Y1 的根底上输出值不断增大
最后: PI调节器的输出趋于稳定值 KIKPe(t)
第七章 数字PID控制及其算法
③优缺点 优点:克服了比例调节有静差存在的缺点,又防止
了积分调节响应慢的缺点,静态和动态特性 得到了改善。 缺点:当控制对象具有较大的惯性时,无法得到很 好的调节品质。
1
KPen en
1
KP
T TI
en
KP
TD T
en
2en
1
en
2
Y n
1
KP
en
en
1
T TI
en
TD T
en
2en
1
en
2
Yn 1 KPenen 1 Ien Den 2en 1 en 2
式中:e(n)=w-u(n):w—给定值 u(n)—第n次实际输入值
KP—比例系数 D=TD/T—微分系数
在模拟控制系统中调节器的正、反作用是靠改变模拟 调节器中的正、反作用开关的位置来实现的。
第七章 数字PID控制及其算法
7.3.1 正、反作用问题
在数字控制系统中,可用两种方法来实现正、反作用控制: 改变偏差E(K)的公式 正作用:E(K)=M(K)-R(K) 反作用:E(K)=R(K)-M(K) 其中M(K)是测量值,R(K)是给定值 对运算结果进行改变 E(K)计算公式不变,假设需要反作用时,在完成PID运算 之后,先将其结果求补,而后再送到D/A转换器进行转换, 进而输出。
FX3版第7、8章
(1)一阶惯性数字滤波 模拟量反馈信号pv(t)采样后用一阶惯性数字滤波器来滤除干扰噪声,Tf是
滤波器的时间常数。输入滤波常数 = Tf /(Tf +TS),TS为采样周期。 (0~1)越大滤波效果越好;过大会使系统的响应迟缓。
(2)不完全微分PID
微分容易引入高频干扰。为此在微分部分增加了一阶惯性滤波。下式是不
完全微分PID的传递函数,微分增益KD是不完全微分的滤波时间常数与微分 时间TD的比值。
(3)反馈量微分PID 设定值SVn的突变将会使误差EVn和PID的输出量MVn突变,为了消除给定值 突变的影响,只对反馈量PVnf 微分。不考虑给定值的变化(即令SVn为常 数),有
2.闭环控制的工作原理 闭环负反馈控制可以使测量值PVn等于或跟随设定值SVn。假设实际温度值 c(t)低于给定的温度值,误差EVn为正,mv(t)将增大,使执行机构(电动调节 阀)的开度增大,进入加热炉的天然气流量增加,加热炉的温度升高,最终 使实际温度接近或等于设定值。
3.闭环控制反馈极性的确定 闭环控制必须保证系统是负反馈,如果系统接成了正反馈,将会失控。
均值会降低PL编程 不同型号的PLC可连接1、2、4台FX3U-4AD-ADP。M8280~M8283为ON和 OFF时,通道1~4分别为电流输入和电压输入。D8280~D8283用来保存来自 通道1~4的输入数据。D8284~D8287用来设置通道1~4的平均次数(1~ 4095)。 D8288用于保存适配器的错误信息。 图7-3中,适配器的通道1和通道2分别被设置为电压输入和电流输入。开机 时将错误信息M8288中的第6位(硬件错误)和第7位(通信数据错误)清零。 在运行时将D8288中的错误信息传送到M0~M15。 通道1和通道2的平均值滤波的次数为8,D200和D201用来存放通道1和通道2 的A-D转换的平均值。
模拟量PID参数调节(重要)
模拟量PID参数调节模拟量PID参数调节PID就是比例微积分调节,具体你可以参照自动控制课程里有详细介绍!正作用与反作用在温控里就是当正作用时是加热,反作用是制冷控制。
PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机等。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
不同的控制系统﹐其传感器﹑变送器﹑执行机构是不一样的。
比如压力控制系统要采用压力传感器。
电加热控制系统的传感器是温度传感器。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID 控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intelligentregulator),其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PI D控制实现的压力、温度、流量、液位控制器,能实现PID控制功能的可编程控制器(PLC),还有可实现P ID控制的PC系统等等。
可编程控制器(PLC)是利用其闭环控制模块来实现PID控制,而可编程控制器(PLC)可以直接与ControlNet 相连,如Rockwell的PLC-5等。
还有可以实现PID控制功能的控制器,如Rockwell 的Logix产品系列,它可以直接与ControlNet相连,利用网络来实现其远程控制功能。
1、开环控制系统开环控制系统(open-loop controlsystem)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
PID指令及自整定系统总结

PID指令及自整定系统总结第一部分、PID 控制Micro/WIN 提供了PID Wizard(PID 指令向导),可以帮助我们方便地生成一个闭环控制过程的PID 算法。
此向导可以完成绝大多数PID 运算的自动编程,只需在主程序中调用PID 向导生成的子程序,就可以完成PID 控制任务。
PID 向导既可以生成模拟量输出PID 控制算法,也支持开关量输出;既支持连续自动调节,也支持手动参与控制。
PID 向导编程步骤在Micro/WIN 中的命令菜单中选择:工具> 指令向导,然后在指令向导窗口中选择PID 指令:图1. 选择PID 向导在使用向导时必须先对项目进行编译,在随后弹出的对话框中选择“Yes” ,确认编译。
如果已有的程序中存在错误,或者有没有编完的指令,编译不能通过。
如果项目中已经配置了一个PID 回路,则向导会指出已经存在的PID 回路,并让你选择是配置修改已有的回路,还是配置一个新的回路:图2. 选择需要配置的回路----------------------- Page 2-----------------------第一步:定义需要配置的PID 回路号第二步:设定PID 回路参数图3. 设置PID 参数定义回路设定值(SP,即给定)的范围:在低限(Low Range)和高限(High Range)输入域中输入实数,缺省值为0.0 和100.0,表示给定值的取值范围占过程反馈量程的百分比。
这个范围是给定值的取值范围。
它也可以用实际的工程单位数值表示,接下来会和过程输入量一起总结。
比例增益:即比例常数。
积分时间:如果不想要积分作用,可以把积分时间设为无穷大:9999.99微分时间:如果不想要微分回路,可以把微分时间设为0 。
采样时间:是PID 控制回路对反馈采样和重新计算输出值的时间间隔。
在向导完成后,若想要修改此数,则必须返回向导中修改,不可在程序中或状态表中修改。
----------------------- Page 3-----------------------第三步:设定回路输入输出值图4. 设定PID 输入输出参数标定:指定输入类型单极性:即输入的信号为正,如0-10V 或0-20mA 等双极性:输入信号在从负到正的范围内变化。
可编程序控制器模拟量及PID算法应用案例
机器人制作 控制工程基础(第3版) 过程控制原理与系统 自动检测技术 信息科学与技术导论 大规模系统构架建模及其开发技术 Web程序设计 Visual Basic程序设计 数据结构 实用工具软件简明教程 程序设计导引及在线实践 编译原理课程设计 基于Linux的Oracle数据库管理 可编程控制器原理、应用与实训 微机原理与接口技术 PIC单片机原理与接口技术 网络系统集成项目实践 2.0网站开发实例教程
自动控制原理 数字逻辑 数据结构算法解析
数字逻辑
DSP技术与应用实例(第2版)
数据库原理与设计
CMMI和集成化软件研发管理
XBRL数据集成处理与分析
微机原理与接口技术 计算机仿真技术第二版
动态网页设计实训教程
人工智能技术及应用
过程控制仪表 工业控制计算机系统及应用 系统与数据恢复技术 数据库语言程序设计 数字信息模式识别理论与应用 数字逻辑与数字系统(第四版)
复杂问题决策支持模式研究 信息安全技术 自然计算与网络智能 Flex与ActionScript编程 信息存储与检索(第二版) 传感器技术及应用实例 智能仪表原理与设计技术 数据结构:从应用到实现(Java版) 计算机编译原理 LINUX系统管理(影印版) 松翰SN8P2700系列单片机原理及应用技术 2.0网络数据库开发 互联网应用理论与实践教程 微型计算机原理与接口技术 蚁群优化算法 MATLAB/Simulink与控制系统仿真 不等式机器证明与自动发现 计算智能与计算电磁学 执行元件及控制 复杂系统智能评价方法与应用
Java语言实用教程(第2版) 基于VB和SQL的数据库编程技术 汇编语言程序设计 编译原理 网络操作系统案例教程 开源软核处理器OpenRisc的SOPC设计 现场总线系统监控与组态软件 嵌入式系统 芯片级主板维修标准教程 MSP430单片机基础与实践 80C51嵌入式系统教程 网络控制系统与应用 网络安全技术实用教程 遥感图像处理理论与实践 微机原理与汇编语言 软件工程基础 自动控制原理与系统 无线传感器及元器件:网络设计与应用 智能仪器原理与设计
S7200PLC模拟量及PID控制的实例剖析

任务一: PLC模拟量控制及应用
▪ 1.模拟量输入
➢ (4)输入模拟量的读取 ➢ 每个模拟量占用一个字长(16位),其中数据占12位,依据输入模拟量
的极性,其数据字格式有所不同,其格式如图7-3所示。
MSB
LSB
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
0
12 位数据值
任务一入(AI)寻址 ➢ 通过A/D模块,S7—200 CPU可以将外部的模拟量
(电流或电压)转换成一个字长(16位)的数字量。 可以用区域标识符(AI)、数据长度(W)和模拟通 道的其始地址来读取这些量,其格式为:AIW[起始字 节地址] ➢ 因为模拟输入量为一个字长,且从偶数字节开始存放, 所以必须从偶数字节地址读取这些值,如AIW0、 AIW2、AIW4等,模拟量输入值为只读数据。
切断模块电源,用DIP开关选择需要的输入范围。 接通CPU和模块电源,使模块稳定15min。 用一个变送器、一个电压源或电流源,将零值信号加到模块的一个输入端。 读取该输入通道在CPU中的测量值。 调节模块上的OFFSET(偏置)电位器,直到读数为零,或所需要的数字值。 将一个满刻度模拟量信号接到某一个输入端子,读出A/D转换后的值。 调节模块上的GAIN(增益)电位器,直到读数为32 000,或所需要的数字值。 必要时重复上述校准偏置和增益的过程。
电压负载 电流负载
PID调节-指令用法与设置步骤-模拟量和PWM-自编

S7-300的PID调节一.PID的应用场合PID调节(P比例,I积分,D微分):常用于需要用温度,液位,压力等闭环控制动作的场所。
常用的PID调节有三种:A.用温控等仪表进行调节,但是一般常规仪表只有一路PID控制通道,如果要实现多路PID控制,就需要很多仪表,成本过高,且不便于集中处理。
B.用PLC中的FB41/FB58块(模拟量输出控制,FB41/FB58 就相当于我们常规仪表里的控制器,FB58是专用于温度控制的块,但是占CPU 资源过大),需要用到的硬件为:1. PLC:CPU及模拟量输入输出模块;2. 传感器:接收压力,温度等信号;3. 变送器:将温度,压力等信号转换成电流或电压信号,依所用的模块可以取舍,例如如果PLC模拟量输入模块带有RTD模块(直接接热电阻信号)的功能,温度变送器可以不用;4. 功率调节器(调压模块){必备}:接入模拟量输出模块,用模拟量输出的调节,调节电压大小,进行恒定的输出,控制被执行元件(例如加热器);5.加热/加压器:最后的执行元件,接在功率调节器上,用来升/降温度和压力等;简易结构如下图:C.对于无法用模拟量控制的硬件,比如冷却风扇的启停等,只能用开关量控制,可以用PID算法(PWM)控制固态继电器(SSR)的通断,实现对温度的控制(FB41联合FB43,或者FB41联合FB59或者FB58联合FB59使用,FB58,FB59是专用于温度调节的块,但是占用CPU资源过大)。
控制原理:温度传感器检测到传感器的温度信号,经温度变送器将温度值转换成4~20mA的电流信号,送入PLC AI模块。
PLC把这个测量信号经过标度变换与设定值比较得到偏差,经PID运算后,发出PWM控制信号,经PWM来控制固态继电器的通断,来间接调节加热元件等的通断,从而实现温度的连续控制。
需要的元器件:1.固态继电器:与方法B相比,是将B中的功率调节器换成了固态继电器;2.其他与B类似,如果PLC模拟量输入模块带有RTD模块(直接接热电阻信号)的功能,温度变送器可以不用;二.下面主要介绍方法B和C的原理和程序编写:二.1 方法B—用PLC中的FB41块(模拟量输出控制):PLC需要用到的块为:OB35,FB41,FC105(若用RTD模块接收温度可不用),FC106。
第5章 西门子S7-200系列PLC模拟量,PID指令及应用

输入端子 工作电源
增益电位器 DIP开关
单极性模拟量 SW1 ON SW2 OFF ON SW3 ON OFF
满量程输入
分辨率
0~10V 0~5V 0~20mA
2.5mV 1.25mV 5μA 分辨率
双极性模拟量 SW1 OFF SW2 OFF ON SW3 ON OFF
满量程输入
±5V ±2.5V
M X 1.0 MPn MDn
当 M n 1 .0 时
当 M n 0 .0 时
M X ( MPn MDn )
、
第N次采样 时的比例项
第N次采样 时的微分项
为了实现平滑切换,系统会作下列调整:
SPn PV n
Mx Mn
//给定值=过程变量
PVn 1 PVn //过程变量前值=过程变量当前值
●从输入通 道 AIW0对 单极性模拟 量进行采样、 转换,并填 入回路参数 表程序。
标准化实数 16位有符号整数 ● 回路输出转化的步骤: 计算公式: R 浮点型 M n offset Span
控制对象不同,对特性要求不同,选择的 PID回路类型也不同。必须根据系统对动态品 质、稳态精度和调节速度的要求来合理选择P、 I、D回路中的一种或多种控制类型。
2.5mV 1.25mV
◆ 模拟量输出模块 EM232的特性
● 模拟量输出模块 EM232 的D/A 转换精度: 提供 12位的D/A转换器 。
(EM232)
输出端子 工作电源
※ 每个输出模块有二路输出(3个端子一组) ※ 可以输出±10V电压或0~20mA电流信号; ◎ 电压负载时:V0端接负载正极、 M0 接负 载负极。 ◎ 电流负载时:I0端接负载正极、 M0 接负 载负极。 ※ 模块需要直流24V工作电源。
欧姆龙PLC使用和PID指令使用_郭晓明
欧姆龙学习总结1、软件安装:按照安装包“1安装指南”步骤安装完成,此版本软件为9.0,只有9.1版本以上的才可以使用RS232下载线。
升级软件为9.1版本,点击安装包-升级包,选择”Cmn1004_0402setup”安装,升级为9.1版本。
卸载有专用卸载软件(官方下载)。
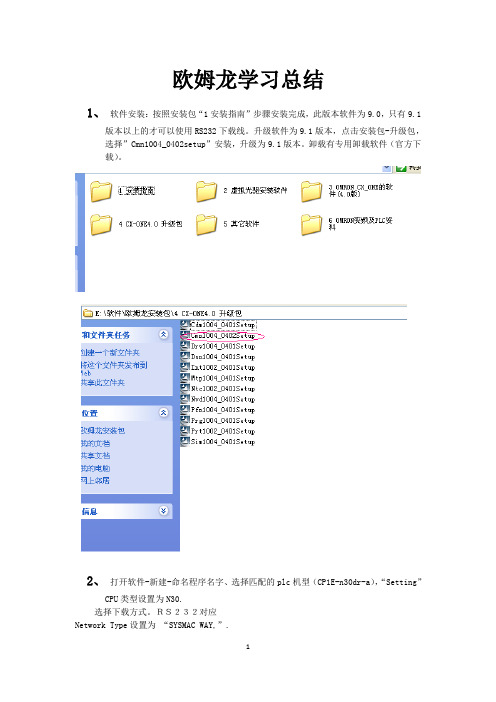
2、打开软件-新建-命名程序名字、选择匹配的plc机型(CP1E-n30dr-a),“Setting”CPU类型设置为N30.选择下载方式。
RS232对应Network Type设置为“SYSMAC WAY,”.3、pid于pidat指令介绍1. PID指令/PID自动整定控制指令PID(190)/PIDA(191)PID是由比例运算(P)、积分运算(I)和微分运算(D)共同组合作用的简称。
其中,比例作用是建立在设定值(SV)上的比例带操作,在此带内控制变量(MV)与偏差成正比,提供一个无振荡的平滑控制过程;积分作用是指对阶跃偏差的自动校正过程;比例作用和积分作用都通过控制结果进行校正,因此不可避免会产生响应滞后。
微分作用弥补了这一缺陷,通过操作变量与偏差形成的斜坡(微分系数)成比例来进行控制,可加速对干扰的响应。
(1)PID控制指令PID(190)PID(190)指令的梯形图如图3-72所示。
图中,S为输入字(即输入PV值);D为输出字(即控制变量输出MV值),S和D均为16位无符号的二进制数(0~FFFFH)或十进制数(0~65535);C为参数字,具有2个自由度PID控制的参数C共有39个字,其中C~C+8的9个字由用户来设置,C+9~C+38的30个字为指令工作区,用户不能占用。
该指令根据C中设定的参数实现PID控制。
当执行条件为ON时,PID(190)按照C中设置的参数(设定值,PID常量等)在两个自由度上对目标值执行PID控制,从输入字S的内容中得到指定输入的数据,并根据设定参数执行PID计算,并将计算结果以操作变量的形式存入输出字D中。
PID
PID手动向自动的无扰动切换:一般的DCS都采用:PV跟踪,PV跟踪:即手动时,设定值SP跟着过程值PV跑,设个选项开关,有的工艺人员不喜欢PV跟踪,因为SP值被冲掉了。
PID控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
其输入e (t)与输出u (t)的关系为其中kp为比例系数;TI为积分时间常数;TD为微分时间常数可以呀!那是因为在讲经典控制理论,所以一般用复频域。
可以用状态空间模型的。
这个在Simulink里可以用积分,微分,比例等分立元件搭建模型的。
也有现成的状态空间模型。
PID是工业生产中最常用的一种控制方式,PID调节仪表也是工业控制中最常用的仪表之一,PID 适用于需要进行高精度测量控制的系统,可根据被控对象自动演算出最佳PID控制参数。
PID参数自整定控制仪可选择外给定(或阀位)控制功能。
可取代伺服放大器直接驱动执行机构(如阀门等)。
PID外给定(或阀位)控制仪可自动跟随外部给定值(或阀位反馈值)进行控制输出(模拟量控制输出或继电器正转、反转控制输出)。
可实现自动/手动无扰动切换。
手动切换至自动时,采用逼近法计算,以实现手动/自动的平稳切换。
PID 外给定(或阀位)控制仪可同时显示测量信号及阀位反馈信号。
PID光柱显示控制仪集数字仪表与模拟仪表于一体,可对测量值及控制目标值进行数字量显示(双LED数码显示),并同时对测量值及控制目标值进行相对模拟量显示(双光柱显示),显示方式为双LED数码显示+双光柱模拟量显示,使测量值的显示更为清晰直观。
PID参数自整定控制仪可随意改变仪表的输入信号类型。
采用最新无跳线技术,只需设定仪表内部参数,即可将仪表从一种输入信号改为另一种输入信号。
PID参数自整定控制仪可选择带有一路模拟量控制输出(或开关量控制输出、继电器和可控硅正转、反转控制)及一路模拟量变送输出,可适用于各种测量控制场合。
PID参数自整定控制仪支持多机通讯,具有多种标准串行双向通讯功能,可选择多种通讯方式,如RS-232、RS-485、RS-42等,通讯波特率300~9600bps 仪表内部参数自由设定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
● 2.模拟量模块的测量信号类型及测量范围设定
(2)配有量程卡的模拟量模块的测量信号类型和测量范围 的设定配有量程卡的模拟量模块,其量程卡在供货时已插 入模块一侧,如果需要更改量程,必须重新调整量程卡, 以更改测量信号的类型和测量范围。 量程卡可以设定为“A”、“B”、“C”、“D”四个位置, 各种测量信号类型和测量范围的设定在模拟量模块上有相 应的标记指示,可以根据需要进行设定和调整。 调整量程卡的步骤为: ①用锣丝刀将量程卡从模拟量模块中松开; ②将量程卡按测量要求和范围正确定位,然后插入模拟量 模块中。
●表4-8
电流测量范围为0-20mA和4-20mA的模拟值表示
●表4-9
标准Pt x100 RTD温度传感器的模拟值表示如表4-9所示以CPU313C模 块为例,模拟量精度为12位,由表4-6可知,十六位数 中最后三位 为0,因此分辨率为08H。再由表4-9可知,对应的温度分辨率为0.8℃。 对于其它模拟量输入信号的模拟值信号以及模拟量输出信号的表示, 参阅相关技术文档。
● 3.模拟值的表示
模拟值用二进制补码表示,宽度为16位,符号总在最高位。 模拟量模块的精度最高为15位,如果少于15位,则模拟值 左移调整,然后才保存到模块中。未用的低位填入“0”, 如表4-6所示,表中标有“x”的位为“0”或“1”。
●表4-6 模拟值的精度表示
模拟值的精度表示
●表4-7
电压测量范围±10 V - ±1V的模拟值表示
● 4.2.6 工程数值换算功能FC105的应用
FC105的数值换算公式为:
OUT=((FLOAT
)IN
-K1)/(K2-K1)*(HI_LIM-
LO_LIM )+LO_LIM
●1.图4-2
图4-2设置CPU
图4-3设置CPU313C模块输出信号的类型及量程
●1.图4-3
用同样的方法可对CPU313C模拟量输出通道进行设置, 可以设置为电压输出或电流输出,对于电压输出有0-10V、 ±10V两种选择,对于电流输出有0-20mA、4-20mA、±20mA 三种选择,图4-3中第0通道设置为电压型,范围+/-10V, 第1通道设置为电流型,范围4-20mA。
模拟量及PID
● 第四章 PLC温度控制技术
• 温度控制系统广泛应用于工业控制领域,如钢铁厂、化工 厂、火电厂等锅炉的温度控制系统,电焊机的温度控制系 统等。锅炉温度是一个大惯性系统,一般采用PID调节进 行控制。本章首先介绍温度传感器的使用和S7-300 PLC中 块的基本概念,然后对PID控制器的基本概念进行简单介 绍,并结合一个水箱温度控制系统的实例,详细介绍S7300 PLC中PID控制器的应用。
●1.模拟量模块的主要特性
表4-2、4-3列出了模拟量输入模块SM331的主要特性,更详细的特性说 明请参阅相关技术文档。
●1.表4-3
表4-3 模拟量输入模块SM331的主要特性
●1.表4-4
表4-4 模拟量输出模块SM332的主要特性
●1.表4-5
表4-5 模拟量输出/输出混合模块SM334的主要特性
●表4-9
表4-9 标准Pt x100 RTD温度传感器的模拟值表示
● 4.2.6 工程数值换算功能FC105的应用
工程数值换算功能FC105用来将一个输入的整型值(例如 模拟量I/O格式的整型值)转换为实型值,在工程中具有 广泛的应用。 FC105输入输出参数关系如表4-10。
●表4-10
FC105输入输出参数关系
● 2.模拟量模块的测量信号类型及测量范围设定
由于模拟量输入或输出模块提供有不止一种类型信号的输 入或输出,每种信号的测量范围又有多种选择,因此必须 对模块信号类型和测量范围进行设定。一般采用STEP7软件 设定和量程卡设定两种方法。 (1)通过STEP7软件设定 以CPU313C模块为例进行设置。如上所述,CPU313C不仅是 CPU模块,而且提供了功能丰富的输入输出信号,其中模拟 量输入第0-3通道为电压/电流信号输入,第4通道为电阻/ 铂电阻输入,其设置在STEP7软件中进行,方法为: 在图4-1所示的“HW Config”对话框中,双击“AI5/AO2” 项,打开图4-2的“Properties”属性对话框,该对话框有 “General”、“Addresses”、“Inputs”、“Outputs” 四个选项,选中“Inputs”项,画面如图4-2所示。
● 2.热电阻
本章将要介绍的水箱温度控制系统,传感器采用Pt100铂热 电阻,型号WZP-035,测量温度范围0-300℃。表4-1列出了 范围为0-100℃的Pt100铂热电阻的温度和电阻值的对应关 系。
● 表4-1
●4.1.2 模拟量模块与选型
模拟量模块包括模拟量输入模块SM331、模拟量输出 模块SM332和模拟量输入/输出混合模块SM334。对模 拟量输入模块SM331,可选择的输入信号类型有电压 型、电流型、电阻型、热电阻型、热电偶型,而模 拟量输出模块SM332提供有电压和电流两种类型的信 号输出。有的CPU模块集成了这些信号输入输出功能, 如S7-300的CPU313C模块(订货号6ES7 313-5BE010AB0),不仅提供24路的DI输入和16路的DO输出, 而且配置了5路模拟量输入和2路模拟量信号输出。
●1.图4-1
图4-1 “HW Config”硬件组态对话框
●1.图4-1
对于第0-3通道,可在“Measurement type”中选择电 压或电流输入,在“Measuring range”中根据需要选择测 量范围,对于电压输入有0-10V、±10V两种选择,对于电 流输入有0-20mA、4-20mA、±20mA三种选择。第4通道为电 阻/铂电阻测量通道,有R-2L、RTD-2L两种选择,图中测量 类型已选为RTD-2L,PT 100,用于测量传感器为PT 100铂 热电阻的温度值。