Fanuc数控车床G代码及M指令
Fanuc数控车床G代码及M指令
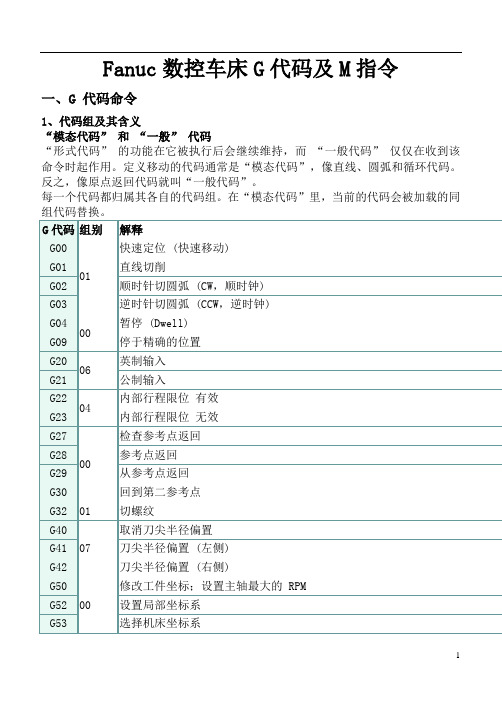
Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码”和“一般”代码“形式代码”的功能在它被执行后会继续维持,而“一般代码”仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
2. 举例①绝对坐标系程序G02 X100. Z90. I50. K0. F0.2或G02 X100. Z90. R50. F02;②增量坐标系程序G02 U20. W-30. I50. K0. F0.2;或G02 U20. W-30. R50. F0.2;G30 第二原点返回 (G30)坐标系能够用第二原点功能来设置。
Fanuc数控车床G代码及M指令(同名5342)
Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G9001 (内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612 恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
FANUC系统所有G功能代码M功能代码.pdf

G00 快速定位G01 直线补间切削G02 圆弧补间切削CW(顺时针)G03 圆弧补间切削CCW(逆时针)G02.3 指数函数补间正转G03.3 指数函数补间逆转G04 暂停G05 高速高精度制御 1G05.1 高速高精度制御 2G06~G08没有G07.1/107 圆筒补间G09 正确停止检查G10 程式参数输入/补正输入G11 程式参数输入取消G12 整圆切削CWG13 整圆切削CCWG12.1/112 极坐标补间有效G13.1/113 极坐标补间取消G14没有G15 极坐标指令取消G16 极坐标指令有效G17 平面选择 X-YG18 平面选择 Y-ZG19 平面选择 X-ZG20 英制指令G21 公制指令G22-G26没有G27 参考原点检查G28 参考原点复归G29 开始点复归G30 第2~4参考点复归G30.1 复归刀具位置 1G30.2 复归刀具位置 2G30.3 复归刀具位置 3G30.4 复归刀具位置 4G30.5 复归刀具位置 5G30.6 复归刀具位置 6G31 跳跃机能G31.1 跳跃机能 1G31.2 跳跃机能 2G31.3 跳跃机能 3G32没有G33 螺纹切削G34 特别固定循环(圆周孔循环)G35 特别固定循环(角度直线孔循环)G36 特别固定循环(圆弧)G37 自动刀具长测定G37.1 特别固定循环(棋盘孔循环)G38 刀具径补正向量指定G39 刀具径补正转角圆弧补正G40 刀具径补正取消G41 刀具径补正左G42 刀具径补正右G40.1 法线制御取消G41.1 法线制御左有效G42.1 法线制御右有效G43 刀具长设定(+)G44 刀具长设定(—)G43.1 第1主轴制御有效G44.1 第2主轴制御有效G45 刀具位置设定(扩张)G46 刀具位置设定(缩小)G47 刀具位置设定(二倍)G48 刀具位置设定(减半)G47.1 2主轴同时制御有效G49 刀具长设定取消G50 比例缩放取消G51 比例缩放有效G50.1 G指令镜象取消G51.1 G指令镜象有效G52 局部坐标系设定G53 机械坐标系选择G54 工件坐标系选择 1G55 工件坐标系选择 2G56 工件坐标系选择 3G57 工件坐标系选择 4G58 工件坐标系选择 5G59 工件坐标系选择 6G54.1 工件坐标系选择扩张48组G60 单方向定位G61 正确停止检查模式G61.1 高精度制御G62 自动转角进给率调整G63 攻牙模式G63.1 同期攻牙模式(正攻牙)G63.2 同期攻牙模式(逆攻牙)G64 切削模式G65 使用者巨集单一呼叫G66 使用者巨集状态呼叫 AG66.1 使用者巨集状态呼叫 BG67 使用者巨集状态呼叫取消G68 坐标回转有效G69 坐标回转取消G70 使用者固定循环G71 使用者固定循环G72 使用者固定循环G73 固定循环(步进循环)G74 固定循环(反向攻牙)G75 使用者固定循环G76 固定循环(精搪孔)G77 使用者固定循环G78 使用者固定循环G79 使用者固定循环G80 固定循环取消G81 固定循环(钻孔/铅孔)G82 固定循环(钻孔/计数式搪孔)G83 固定循环(深钻孔)G84 固定循环(攻牙)G85 固定循环(搪孔)G86 固定循环(搪孔)G87 固定循环(反搪孔)G88 固定循环(搪孔)G89 固定循环(搪孔)G90 绝对值指令G91 增量值指令G92 机械坐标系设定G93 逆时间进给G94 非同期进给(每分进给)G95 同期进给(每回转进给)G96 周速一定制御有效G97周速一定至于取消G98 固定循环起始点复归G99 固定循环 R点复归G114.1 主轴同期制御G100~225 使用者巨集(G码呼叫)最大10个M00 程式停止(暂停)M01 程式选择性停止/选择性套用M02 程序结束M03 主轴正转M04 主轴反转M05 主轴停止M06 自动刀具交换M07 吹气启动M08 切削液启动M09 切削液关闭M10 吹气关闭→M09也能关吹气 M11《斗笠式》主轴夹刀M12 主轴松刀M13 主轴正转+切削液启动M14 主轴反转+切削液启动M15 主轴停止+切削液关闭M16— M18没有M19 主轴定位M20 ——没有M21 X轴镜象启动M22 Y轴镜象启动M23 镜象取消M24 第四轴镜象启动M25 第四轴夹紧M26 第四轴松开M27 分度盘功能M28 没有M29 刚性攻牙M30 程式结束/自动断电 M31 —— M47 没有M48 深钻孔启动M49 —— M51 没有M52 刀库右移M53 刀库左移M54 —— M69 没有M70 自动刀具建立M71 刀套向下M72 换刀臂60°M73 主轴松刀M74 换刀臂180°M75 主轴夹刀M76 换刀臂0°M77 刀臂向上M78 —— M80 没有M81 工作台交换确认M82 工作台上M83 工作台下M84 工作台伸出M85 工作台缩回M86 工作台门开M87 工作台门关M88 —— M97 没有 M98 调用子程序M99 子程序结束。
Fanuc的G代码及M代码

Fanuc的G代码及M代码。
G00定位G01直线切削G02顺时针方向圆弧切削G03逆时针方向圆弧切削G04暂停指令G09正确停止检测G10补正设定G12顺时针方向圆周切削G13逆时针方向圆周切削G15极座标系统取消G16极座标系统设定G17XY平面设定G18XZ平面设定G19YZ平面设定G20英制单位设定G21公制单位设定G22软体极限设定G23软体极限设定取消G27机械原点复归检测G28自动经中间点复归机械原点G29自动从参考点复归G30自动复归到第二原点G40刀具半径补正取消G41刀具半径偏左补正G42刀具半径偏右补正G43刀具长度沿正向补正G44刀具长度沿负向补正G49刀具长度补正取消G45刀具位置补正增加G46刀具位置补正减少G47刀具位置补正两倍增加G48刀具位置补正两倍减少G50比例功能取消OFFG51比例功能设定ONG52回复到基本座标系统G53回复到机械座标系统G54第一工件座标系统G55第二工件座标系统G56第三工件座标系统G57第四工件座标系统G58第五工件座标系统G59第六工件座标系统G60 外部补正G70圆周等分段循环G71圆周分段循环G72直线分段循环G73高速喙钻循环G74左旋牙切削循环G76精搪孔循环G77反面搪孔循环G80固定循环取消G81钻孔循环G82沉头孔加工循环G83啄钻循环G84右旋牙切削循环G85搪孔循环G86搪孔循环G87搪孔循环G88搪孔循环G89搪孔循环G90绝对指令座标值设定G91增量指令座标值设定G92绝对程式零点设定G94每分钟进给量设定mm/minG95每转进给给设定mm/revG98固定循环,刀具复归到起始点G99固定循环,刀具复归到R点M00 程序停止M01 選擇性程序停止M02 程序結束M03 主軸順時針旋轉M04主轴逆时针旋转M05主轴停止M06刀具交换M07雾化冷却液开启M08冷却液开启M09冷却液关启M10工作台(B轴)锁住M11工作台(B轴)松开M13主轴顺时针转动及加切削液M14主轴逆时针转动及加切削液M15正方向运动M16负方向运动M19主轴定位M30程式结束记忆体回归M90程式中断取消M91程式中断设定M92多段暂存取消M93多段暂存设定M94镜像投影工能取消M95镜像投影工能设定M96刀具补正圆弧转角模式M97刀具补正交角转角模式M98副程式呼叫M99副程式结束(注:文档可能无法思考全面,请浏览后下载,供参考。
数控车床G指令和M代码
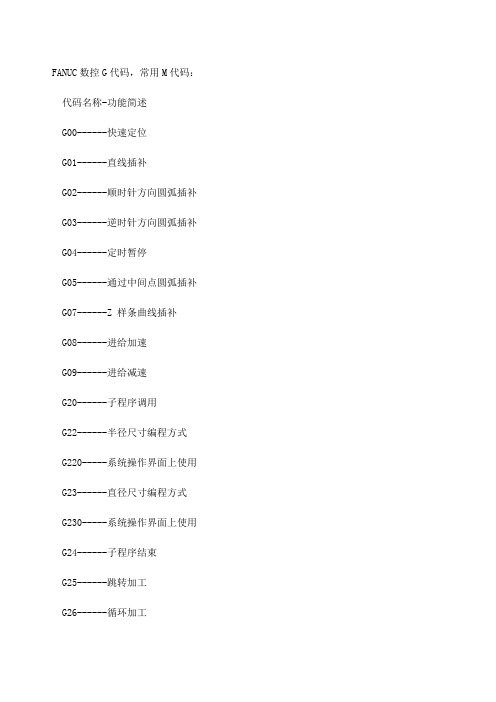
数控车床G指令和M代码详细解释FANUC数控G代码,常用M代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详解G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
Fanuc数控车床G代码及M指令

Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同G7000精加工循环G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G9001(内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
FANUC数控铣床G功能代码M代码
FANUC数控铣床G功能代码M代码G代码:
1.G00-高速定位
2.G01-线性插补
3.G02-顺时针圆弧插补
4.G03-逆时针圆弧插补
5.G04-暂停
6.G17-XY平面选择
7.G18-XZ平面选择
8.G19-YZ平面选择
9.G20-英制单位选择
10.G21-公制单位选择
11.G28-快速归零
12.G40-切削补偿关闭
13.G41-切削补偿左偏
14.G42-切削补偿右偏
15.G43-刀具补偿
16.G44-刀具长度补偿负方向
17.G49-切削补偿取消
18.G80-无条件取消模态
19.G90-绝对编程
20.G91-增量编程
M代码:
1.M00-程序结束
2.M01-可选停止(可设为暂停)
3.M02-程序结束并重启
4.M03-主轴正转
5.M04-主轴反转
6.M05-主轴停止
7.M06-刀具换刀
8.M08-冷却液开启
9.M09-冷却液关闭
10.M30-程序结束并重启
11.M41-自动换刀准备
12.M42-自动换刀执行
13.M98-副程序调用
14.M99-副程序结束
以上只是部分常用的G功能代码和M代码,实际应用中还有更多的代码可以根据具体需求进行选择和使用。
不同型号的数控铣床可能会有一些特定的代码和功能,需根据相应的型号手册进行了解和使用。
Fanuc数控车床G代码及M指令
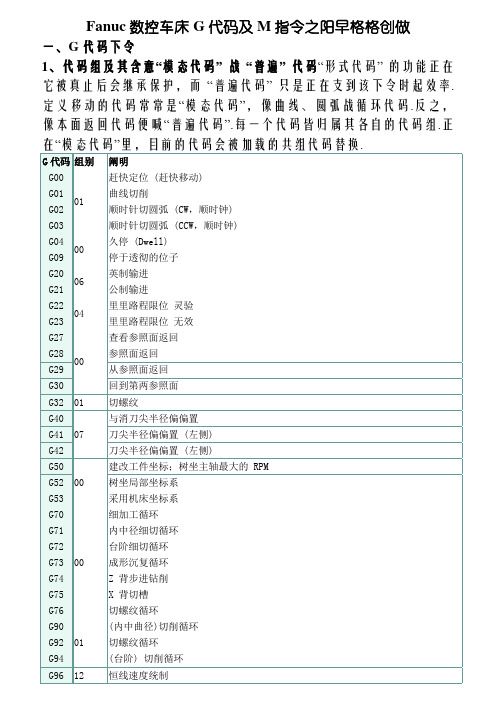
Fanuc数控车床G代码及M指令之阳早格格创做一、G 代码下令1、代码组及其含意“模态代码” 战“普遍” 代码“形式代码” 的功能正在它被真止后会继承保护,而“普遍代码” 只是正在支到该下令时起效率.定义移动的代码常常是“模态代码”,像曲线、圆弧战循环代码.反之,像本面返回代码便喊“普遍代码”.每一个代码皆归属其各自的代码组.正G97 恒线速度统制与消G98 10 牢固循环返回起初面2、代码阐明:G00 定位1. 圆法G00 X_ Z_那个下令把刀具从目前位子移动到下令指定的位子 (正在千万于坐标办法下),大概者移动到某个距离处 (正在删量坐标办法下). 2. 非曲线切削形式的定位咱们的定义是:采与独力的赶快移动速率去决断每一个轴的位子.刀具路径没有是曲线,根据到达的程序,呆板轴依次停止正在下令指定的位子.3. 曲线定位刀具路径类似曲线切削(G01) 那样,以最短的时间(没有超出每一个轴赶快移动速率)定位于央供的位子.4. 举例N10 G0 X100 Z65G01 曲线插补1. 圆法G01 X(U)_ Z(W)_ F_ ;曲线插补以曲线办法战下令给定的移动速率从目前位子移动到下令位子.X, Z: 央供移动到的位子的千万于坐标值.U,W: 央供移动到的位子的删量坐标值. 2. 举例①千万于坐标步调 G01 X50. Z75. F0.2 ;X100.; ②删量坐标步调G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 圆法G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03)X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凸圆G03 –顺时钟 (CCW) 凸圆X, Z –正在坐标系里的末面U, W –起面与末面之间的距离I, K –从起面到核心面的矢量 (半径值)R –圆弧范畴 (最大180度). 2. 举例①千万于坐标系步调G02 X100.Z90. I50. K0. F0.2大概G02 X100. Z90. R50. F02;②删量坐标系步调G02U20. W-30. I50. K0. F0.2;大概G02 U20. W-30. R50. F0.2;G30 第两本面返回(G30)坐标系不妨用第两本面功能去树坐.1. 用参数 (a, b) 树坐刀具起面的坐标值.面“a” 战“b” 是机床本面与起刀面之间的距离.2. 正在编程时用 G30 下令代替 G50 树坐坐标系.3. 正在真止了第一本面返回之后,没有管刀具本质位子正在何处,遇到那个下令时刀具便移到第两本面.4. 调换刀具也是正在第两本面举止的.G32 切螺纹 (G32) 1. 圆法G32 X(U)__Z(W)__F__ ;G32 X(U)__Z(W)__E__ ;F –螺纹导程树坐E –螺距 (毫米)正在体例切螺纹步调时应当戴主轴转速RPM 匀称统制的功能(G97),而且要思量螺纹部分的某些个性.正在螺纹切削办法下移动速率统制战主轴速率统制功能将被忽略.而且正在支进脆持按钮起效率时,其移动进程正在完毕一个切削循环后便停止了.2. 举例G00 X29.4; (1循环切削)G32 Z-23. F0.2;G00 X32; Z4.; X29.;(2循环切削)G32 Z-23. F0.2;G00 X32.; Z4.G40/G41/G42 刀具曲径偏偏置功能(G40/G41/G42)1. 圆法G41 X_ Z_;G42 X_ Z_;正在刀具刃是尖利时,切削进程依照步调指定的形状真止没有会爆收问题.没有过,真正在的刀具刃是由圆弧形成的 (刀尖半径) 便像上图所示,正在圆弧插补战攻螺纹的情况下刀尖半径会戴去缺面.2. 偏偏置功能下令切削位子刀具路径G40与消刀具按步调路径的移动G41左侧刀具从步调路径左侧移动G42左侧刀具从步调路径左侧移动补偿的准则与决于刀尖圆弧核心的动背,它经常与切削表面法背里的半径矢量没有沉合.果此,补偿的基准面是刀尖核心.常常,刀具少度战刀尖半径的补偿是按一个假念的刀刃为基准,果此为丈量戴去一些艰易.把那个准则用于刀具补偿,应当分别以 X 战 Z 的基准面去丈量刀具少度刀尖半径 R,以及用于假念刀尖半径补偿所需的刀尖形式数 (0-9).那些真质应当事先输进刀具偏偏置文献.“刀尖半径偏偏置” 应当用 G00 大概者 G01功能去下达下令大概与消.没有管那个下令是没有是戴圆弧插补,刀没有会透彻移动,引导它渐渐偏偏离所真止的路径.果此,刀尖半径偏偏置的下令应当正在切削进程开用之前完毕;而且不妨预防从工件中部起刀戴去的过切局里.反之,要正在切削进程之后用移动下令去真止偏偏置的与消过G54-G59 工件坐标系采用(G54-G59) 1. 圆法G54 X_ Z_;2. 功能通过使用 G54 – G59 下令,去将机床坐标系的一个任性面 (工件本面偏偏移值) 给予 1221 – 1226 的参数,并树坐工件坐标系(1-6).该参数与 G 代码要相对于应如下:工件坐标系1 (G54) ---工件本面返回偏偏移值---参数 1221工件坐标系2 (G55) ---工件本面返回偏偏移值---参数 1222工件坐标系 3 (G56) ---工件本面返回偏偏移值---参数 1223工件坐标系 4 (G57) ---工件本面返回偏偏移值---参数 1224工件坐标系 5 (G58) ---工件本面返回偏偏移值---参数 1225工件坐标系 6 (G59) ---工件本面返回偏偏移值---参数 1226正在交通电源战完毕了本面返回后,系统自动采用工件坐标系 1 (G54) .正在有“模态”下令对于那些坐标干出改变之前,它们将脆持其灵验性.除了那些树坐步调中,系统中另有一参数可坐刻变动G54~G59 的参数.工件中部的本面偏偏置值不妨用 1220 号参数去传播.G70 细加工循环(G70)1. 圆法G70 P(ns) Q(nf)ns:细加工形状步调的第一个段号.nf:细加工形状步调的末尾一个段号2. 功能用G71、G72大概G73细车削后,G70细车削.G71 中园细车牢固循环(G71)1. 圆法G71U(△d)R(e)G71P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)N(ns)…………….F__从序号ns至nf的步调段,指定A及B间的移动指令..S__.T__N(nf)……△d:切削深度(半径指定)没有指定正背标记.切削目标依照AA’的目标决断,正在另一个值指定前没有会改变.FANUC系统参数(NO.0717)指定.e:退刀路程本指定是状态指定,正在另一个值指定前没有会改变.FANUC系统参数(NO.0718)指定.ns:细加工形状步调的第一个段号.nf:细加工形状步调的末尾一个段号.△u:X目标细加工预留量的距离及目标.(曲径/半径)△w: Z目标细加工预留量的距离及目标.2. 功能如果正在下图用步调决断A至A’至B的细加工形状,用△d(切削深度)车掉指定的地区,留细加工预留量△u/2及△w.G72 端里车削牢固循环(G72)1. 圆法G72W(△d)R(e)G72P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)△t,e,ns,nf, △u, △w,f,s及t的含意与G71相共.2. 功能如下图所示,除了是仄止于X轴中,本循环与G71相共.G73 成型加工复式循环(G73)1. 圆法G73U(△i)W(△k)R(d)G73P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)N(ns)…………………沿A A’ B的步调段号N(nf)………△i:X轴目标退刀距离(半径指定), FANUC系统参数(NO.0719)指定.△k: Z轴目标退刀距离(半径指定), FANUC系统参数(NO.0720)指定.d:分隔次数那个值与细加工沉复次数相共,FANUC系统参数(NO.0719)指定.ns: 细加工形状步调的第一个段号.nf:细加工形状步调的末尾一个段号.△u:X目标细加工预留量的距离及目标.(曲径/半径)△w: Z目标细加工预留量的距离及目标.2. 功能本功能用于沉复切削一个渐渐变更的牢固形式,用本循环,可灵验的切削一个用细加工段制大概铸制等办法已经加工成型的工件.G74 端里啄式钻孔循环(G74)1. 圆法G74 R(e);G74 X(u) Z(w) P(△i) Q(△k) R(△d) F(f)e:退却量本指定是状态指定,正在另一个值指定前没有会改变.FANUC系统参数(NO.0722)指定.x:B面的X坐标u:从a至b删量z:c面的Z坐标w:从A至C删量△i:X目标的移动量△k:Z目标的移动量△d:正在切削底部的刀具退刀量.△d的标记一定是(+).然而是,如果X(U)及△I简略,可用所要的正背标记指定刀具退刀量.f:进给率: 2. 功能如下图所示正在本循环可处理断削,如果简略X(U)及P,截止只正在Z轴支配,用于钻孔.。
Fanuc数控车床G代码及M指令68204

Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同G代码组别解释G0001 快速定位 (快速移动)G01 直线切削G02 顺时针切圆弧 (CW,顺时钟) G03 逆时针切圆弧 (CCW,逆时钟)G0400 暂停 (Dwell)G09 停于精确的位置G2006 英制输入G21 公制输入G2204 内部行程限位有效G23 内部行程限位无效G2700 检查参考点返回G28 参考点返回G29 从参考点返回G30 回到第二参考点G32 01 切螺纹G4007 取消刀尖半径偏置G41 刀尖半径偏置 (左侧) G42 刀尖半径偏置 (右侧)G5000 修改工件坐标;设置主轴最大的 RPMG52 设置局部坐标系G53 选择机床坐标系G7000精加工循环G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G9001(内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
FANUC数控G代码,常用M代码

代码名称-功能简述
01* G00------直线快速定位
02* G01------直线插补.直线切削近给
03* G02------顺时针方向圆弧插补
04* G03------逆时针方向圆弧插补
05* G04------定时暂停.暂停指定时间
06* G07.1------圆柱插补
14* G20------英制单位加工
15* G21------公制单位加工
16* G28------参考点复归
17* G29------从参考点复归
18* G30------任意参考点回归
19* G31------跳跃机能
20* G32------ 螺牙切削
21* G40------刀具半径补偿消除
22* G41------刀具半径左补偿
23* G42------刀具半径右补偿
24* G50------坐标系统设定/主轴最高转速限制
25* G52------局部坐标设定
26* G53------机械坐标定位
27* G54 .G59.9------工作坐标系统设定
07* G09------确保停止检测
08* G10------可程式资料设置
09* G12.1------启动机坐标插补
10* G13.1------取消机坐标插补
11* G17------设定X-Y工作平面
12* G18------设定Z-X工作平面
13* G19------设定Y-Z工作平面
42* G87------侧面钻孔循环
43* G88------侧面攻牙循环
44* G89------侧面镗孔循环
FANUC常用的G代码和M代码

FANUC常用的G代码和M代码FANUC常用的G代码和M代码G功能字FANUC系统G00—快速移动点定位G01—直线插补G02—顺时针圆弧插补G03—逆时针圆弧插补G04—暂停G17—XY平面选择G18—ZX平面选择G19—YZ平面选择G32—螺纹切削---G33—恒螺距螺纹切削G40—刀具补偿注销刀具补偿注销G41—刀具补偿——左刀具补偿G42—刀具补偿——右刀具补偿G43—刀具长度补偿——正G44—刀具长度补偿——负G49—刀具长度补偿注销G50—主轴最高转速限制G54~G59加工坐标系设定零点偏置G65—用户宏指令G70—精加工循环英制G71—外圆粗切循环米制G72—端面粗切循环G73—封闭切削循环G74—深孔钻循环G75—外径切槽循环G76—复合螺纹切削循环G80—撤销固定循环撤销固定循环G81—定点钻孔循环固定循环G90—绝对值编程绝对尺寸G91—增量值编程增量尺寸G92—螺纹切削循环主轴转速极限G94—每分钟进给量直线进给率G95—每转进给量旋转进给率G96—恒线速控制恒线速度G97—恒线速取消注销G98—返回起始平面G99—返回R平面M功能字含义表M00—程序停止M01—计划停止M02—程序停止M03—主轴顺时针旋转M04—主轴逆时针旋转M05—主轴旋转停止M06—换刀M07—2号冷却液开M08—1号冷却液开M09—冷却液关M30—程序停止并返回开始处M98—调用子程序M99—返回子程序。
数控车床G指令和M代码详细解释

FANUC数控G代码,常用M代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补G03------逆时针方向圆弧插补G04------定时暂停G05------通过中间点圆弧插补G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用G23------直径尺寸编程方式G230-----系统操作界面上使用G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制G33------等螺距螺纹切削,公制G53,G500-设定工件坐标系注销G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点)G75------返回编程坐标零点G76------返回编程坐标起始点G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详解G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
FANUC系统G和M代码注解

FANUC系统G代码注解G00:快速定位。
G01:直线切削。
G01X_Y_F_G02:顺时针切削。
G02X_Y_R_F_。
R圆弧大小。
G02X_Y_I_J_F_。
I相对X:J相对Y。
G03:逆时针切削。
G03X_Y_R_F_。
R圆弧大小。
G03X_Y_I_J_F_。
I相对X:J相对Y。
G04:暂停。
G04X_。
X暂停时间。
G05:高速加工模式。
G17:平面选择X-Y。
G18:平面选择Z-X。
G19:平面选择Y-Z。
G20:英制输入。
G21:公制输入。
G28:参考原点回归。
G33:螺纹切削。
G40:刀具半径补正取消。
G41:刀具半径补正左(D)。
G42:刀具半径补正右(D)。
G43:刀具长度补正(+)(H)。
G44:刀具长度补正(-)(H)。
G49:刀具长度补正量取消。
G54—G59:工件坐标。
G63:攻牙模式。
G68:坐标回转有效。
X_Y_R_。
X旋转支点X坐标值:Y旋转支点Y坐标值:R旋转角度。
G69:坐标回转取消。
G73:固定循环步进式钻孔循环。
X_Y_Z_R_Q_F_。
R:安全高度Q:每次进刀量。
G74:固定循环反攻牙循环。
X_Y_Z_R_P_F_K_。
P主轴在R点反转暂停时间。
K重复次数。
G76:固定循环精搪孔。
X-Y_Z_R_Q_P_F_K_。
Q每次镗孔到底部X/Y偏移量。
G80:固定循环取消。
G81:固定循环直接钻孔。
G82:固定循环反搪孔。
G83:固定循环深钻孔。
X_Y_Z_R_Q_F_。
R:安全高度Q:每次进刀量。
G84:固定循环正攻牙。
X_Y_Z_R_P_F_K_。
P主轴在R点反转暂停时间。
K重复次数。
G90:绝对直指令。
G91:增量直指令。
G98:固定循环起始点回归。
G99:固定循环R点回归。
G16:极坐标。
X_Y_F_。
X:角度Y:长度。
G15:极坐标取消。
1 / 2FANUC系统M代码注解M00:程式暂停。
M01:选择性暂停。
M02:程式结束。
M03:主轴正转。
CW。
M04:主轴反转。
数控车床G指令和M代码详细解释
FANUC数控G代码,常用M代码:代码名称-功能简述G00------快速定位G01------直线插补G02------顺时针方向圆弧插补 G03------逆时针方向圆弧插补 G04------定时暂停G05------通过中间点圆弧插补 G07------Z 样条曲线插补G08------进给加速G09------进给减速G20------子程序调用G22------半径尺寸编程方式G220-----系统操作界面上使用 G23------直径尺寸编程方式G230-----系统操作界面上使用 G24------子程序结束G25------跳转加工G26------循环加工G30------倍率注销G31------倍率定义G32------等螺距螺纹切削,英制 G33------等螺距螺纹切削,公制 G53,G500-设定工件坐标系注销 G54------设定工件坐标系一G55------设定工件坐标系二G56------设定工件坐标系三G57------设定工件坐标系四G58------设定工件坐标系五G59------设定工件坐标系六G60------准确路径方式G64------连续路径方式G70------英制尺寸寸G71------公制尺寸毫米G74------回参考点(机床零点) G75------返回编程坐标零点G76------返回编程坐标起始点 G81------外圆固定循环G331-----螺纹固定循环G90------绝对尺寸G91------相对尺寸G92------预制坐标G94------进给率,每分钟进给G95------进给率,每转进给功能详解G00—快速定位格式:G00 X(U)__Z(W)__说明:(1)该指令使刀具按照点位控制方式快速移动到指定位置。
移动过程中不得对工件进行加工。
(2)所有编程轴同时以参数所定义的速度移动,当某轴走完编程值便停止,而其他轴继续运动,(3)不运动的坐标无须编程。
Fanuc的G代码及M代码

Fanuc的G代码及M代码。
G00定位G01直线切削G02顺时针方向圆弧切削G03逆时针方向圆弧切削G04暂停指令G09正确停止检测G10补正设定G12顺时针方向圆周切削G13逆时针方向圆周切削G15极座标系统取消G16极座标系统设定G17XY平面设定G18XZ平面设定G19YZ平面设定G20英制单位设定G21公制单位设定G22软体极限设定G23软体极限设定取消G27机械原点复归检测G28自动经中间点复归机械原点G29自动从参考点复归G30自动复归到第二原点G40刀具半径补正取消G41刀具半径偏左补正G42刀具半径偏右补正G43刀具长度沿正向补正G44刀具长度沿负向补正G49刀具长度补正取消G45刀具位置补正增加G46刀具位置补正减少G47刀具位置补正两倍增加G48刀具位置补正两倍减少G50比例功能取消OFFG51比例功能设定ONG52回复到基本座标系统G53回复到机械座标系统G54第一工件座标系统G55第二工件座标系统G56第三工件座标系统G57第四工件座标系统G58第五工件座标系统G59第六工件座标系统G60 外部补正G70圆周等分段循环G71圆周分段循环G72直线分段循环G73高速喙钻循环G74左旋牙切削循环G76精搪孔循环G77反面搪孔循环G80固定循环取消G81钻孔循环G82沉头孔加工循环G83啄钻循环G84右旋牙切削循环G85搪孔循环G86搪孔循环G87搪孔循环G88搪孔循环G89搪孔循环G90绝对指令座标值设定G91增量指令座标值设定G92绝对程式零点设定G94每分钟进给量设定mm/minG95每转进给给设定mm/revG98固定循环,刀具复归到起始点G99固定循环,刀具复归到R点M00 程序停止M01 選擇性程序停止M02 程序結束M03 主軸順時針旋轉M04主轴逆时针旋转M05主轴停止M06刀具交换M07雾化冷却液开启M08冷却液开启M09冷却液关启M10工作台(B轴)锁住M11工作台(B轴)松开M13主轴顺时针转动及加切削液M14主轴逆时针转动及加切削液M15正方向运动M16负方向运动M19主轴定位M30程式结束记忆体回归M90程式中断取消M91程式中断设定M92多段暂存取消M93多段暂存设定M94镜像投影工能取消M95镜像投影工能设定M96刀具补正圆弧转角模式M97刀具补正交角转角模式M98副程式呼叫M99副程式结束。
Fanuc数控车床G代码及M指令
Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同G7000精加工循环G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G9001(内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
2021年Fanuc数控车床G代码及M指令
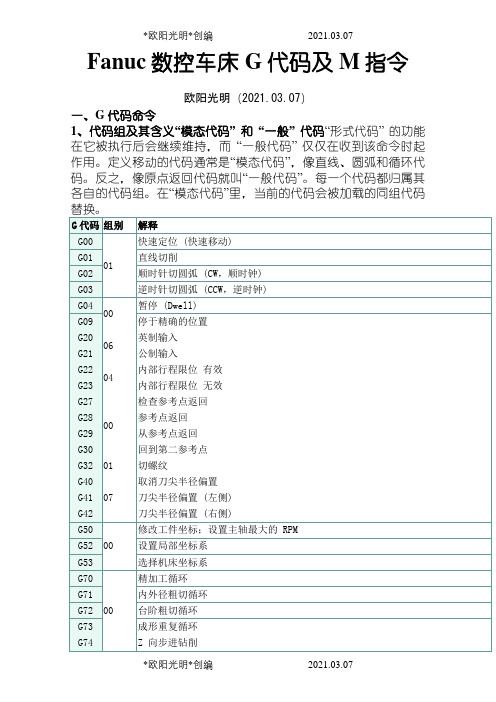
Fanuc数控车床G代码及M指令欧阳光明(2021.03.07)一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码G75 X 向切槽G76 切螺纹循环G9001 (内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612 恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序 G01X50. Z75. F0.2 ;X100.; ②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03)X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧围 (最大180 度)。
2. 举例①绝对坐标系程序G02 X100. Z90. I50. K0. F0.2或G02 X100. Z90. R50. F02;②增量坐标系程序G02 U20. W-30. I50. K0. F0.2;或G02 U20. W-30. R50. F0.2;G30 第二原点返回 (G30)坐标系能够用第二原点功能来设置。
1. 用参数 (a, b) 设置刀具起点的坐标值。
点“a” 和“b” 是机床原点与起刀点之间的距离。
2. 在编程时用 G30 命令代替 G50 设置坐标系。
3. 在执行了第一原点返回之后,不论刀具实际位置在那里,碰到这个命令时刀具便移到第二原点。
4. 更换刀具也是在第二原点进行的。
G32 切螺纹 (G32)1. 格式G32 X(U)__Z(W)__F__ ;G32 X(U)__Z(W)__E__ ;F –螺纹导程设置E –螺距 (毫米)在编制切螺纹程序时应当带主轴转速RPM 均匀控制的功能 (G97),并且要考虑螺纹部分的某些特性。
在螺纹切削方式下移动速率控制和主轴速率控制功能将被忽略。
而且在送进保持按钮起作用时,其移动进程在完成一个切削循环后就停止了。
2. 举例G00 X29.4; (1循环切削)G32 Z-23. F0.2;G00 X32;Z4.;X29.;(2循环切削)G32 Z-23. F0.2;G00 X32.;Z4.G40/G41/G42 刀具直径偏置功能 (G40/G41/G42)1. 格式G41 X_ Z_;G42 X_ Z_;在刀具刃是尖利时,切削进程按照程序指定的形状执行不会发生问题。
不过,真实的刀具刃是由圆弧构成的 (刀尖半径) 就像上图所示,在圆弧插补和攻螺纹的情况下刀尖半径会带来误差。
2. 偏置功能命令切削位置刀具路径G40取消刀具按程序路径的移动G41右侧刀具从程序路径左侧移动G42左侧刀具从程序路径右侧移动补偿的原则取决于刀尖圆弧中心的动向,它总是与切削表面法向里的半径矢量不重合。
因此,补偿的基准点是刀尖中心。
通常,刀具长度和刀尖半径的补偿是按一个假想的刀刃为基准,因此为测量带来一些困难。
把这个原则用于刀具补偿,应当分别以 X 和 Z 的基准点来测量刀具长度刀尖半径 R,以及用于假想刀尖半径补偿所需的刀尖形式数 (0-9)。
这些容应当事前输入刀具偏置文件。
“刀尖半径偏置” 应当用 G00 或者 G01功能来下达命令或取消。
不论这个命令是不是带圆弧插补,刀不会正确移动,导致它逐渐偏离所执行的路径。
因此,刀尖半径偏置的命令应当在切削进程启动之前完成;并且能够防止从工件外部起刀带来的过切现象。
反之,要在切削进程之后用移动命令来执行偏置的取消过G54-G59 工件坐标系选择(G54-G59)1. 格式G54 X_ Z_;2. 功能通过使用 G54 –G59 命令,来将机床坐标系的一个任意点 (工件原点偏移值) 赋予 1221 – 1226 的参数,并设置工件坐标系(1-6)。
该参数与 G 代码要相对应如下:工件坐标系 1 (G54) ---工件原点返回偏移值---参数 1221工件坐标系 2 (G55) ---工件原点返回偏移值---参数 1222工件坐标系 3 (G56) ---工件原点返回偏移值---参数 1223工件坐标系 4 (G57) ---工件原点返回偏移值---参数 1224工件坐标系 5 (G58) ---工件原点返回偏移值---参数 1225工件坐标系 6 (G59) ---工件原点返回偏移值---参数 1226在接通电源和完成了原点返回后,系统自动选择工件坐标系 1 (G54) 。
在有“模态”命令对这些坐标做出改变之前,它们将保持其有效性。
除了这些设置步骤外,系统中还有一参数可立刻变更G54~G59 的参数。
工件外部的原点偏置值能够用 1220 号参数来传递。
G70 精加工循环(G70)1. 格式G70 P(ns) Q(nf)ns:精加工形状程序的第一个段号。
nf:精加工形状程序的最后一个段号2. 功能用G71、G72或G73粗车削后,G70精车削。
G71 外园粗车固定循环(G71)1. 格式G71U(△d)R(e)G71P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)N(ns)…………….F__从序号ns至nf的程序段,指定A及B间的移动指令。
.S__.T__N(nf)……△d:切削深度(半径指定)不指定正负符号。
切削方向依照AA’的方向决定,在另一个值指定前不会改变。
FANUC系统参数(NO.0717)指定。
e:退刀行程本指定是状态指定,在另一个值指定前不会改变。
FANUC系统参数(NO.0718)指定。
ns:精加工形状程序的第一个段号。
nf:精加工形状程序的最后一个段号。
△u:X方向精加工预留量的距离及方向。
(直径/半径)△w: Z方向精加工预留量的距离及方向。
2. 功能如果在下图用程序决定A至A’至B的精加工形状,用△d(切削深度)车掉指定的区域,留精加工预留量△u/2及△w。
G72 端面车削固定循环(G72)1. 格式G72W(△d)R(e)G72P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)△t,e,ns,nf, △u, △w,f,s及t的含义与G71相同。
2. 功能如下图所示,除了是平行于X轴外,本循环与G71相同。
G73 成型加工复式循环(G73)1. 格式G73U(△i)W(△k)R(d)G73P(ns)Q(nf)U(△u)W(△w)F(f)S(s)T(t)N(ns)…………………沿A A’ B的程序段号N(nf)………△i:X轴方向退刀距离(半径指定), FANUC系统参数(NO.0719)指定。
△k: Z轴方向退刀距离(半径指定), FANUC系统参数(NO.0720)指定。
d:分割次数这个值与粗加工重复次数相同,FANUC系统参数(NO.0719)指定。
ns: 精加工形状程序的第一个段号。
nf:精加工形状程序的最后一个段号。
△u:X方向精加工预留量的距离及方向。
(直径/半径)△w: Z方向精加工预留量的距离及方向。
2. 功能本功能用于重复切削一个逐渐变换的固定形式,用本循环,可有效的切削一个用粗加工段造或铸造等方式已经加工成型的工件。
G74 端面啄式钻孔循环(G74)1. 格式G74 R(e);G74 X(u) Z(w) P(△i) Q(△k) R(△d) F(f)e:后退量本指定是状态指定,在另一个值指定前不会改变。
FANUC系统参数(NO.0722)指定。
x:B点的X坐标u:从a至b增量z:c点的Z坐标w:从A至C增量△i:X方向的移动量△k:Z方向的移动量△d:在切削底部的刀具退刀量。
△d的符号一定是(+)。
但是,如果X(U)及△I省略,可用所要的正负符号指定刀具退刀量。
f:进给率:2. 功能如下图所示在本循环可处理断削,如果省略X(U)及P,结果只在Z轴操作,用于钻孔。
G75 外经/径啄式钻孔循环(G75)1. 格式G75 R(e);G75 X(u) Z(w) P(△i) Q(△k) R(△d) F(f)2. 功能以下指令操作如下图所示,除X用Z代替外与G74相同,在本循环可处理断削,可在X轴割槽及X轴啄式钻孔。
G76 螺纹切削循环(G76)1. 格式G76 P(m)(r)(a) Q(△dmin) R(d)G76 X(u) Z(w) R(i) P(k) Q(△d) F(f)m:精加工重复次数(1至99)本指定是状态指定,在另一个值指定前不会改变。
FANUC系统参数(NO.0723)指定。
r:到角量本指定是状态指定,在另一个值指定前不会改变。
FANUC系统参数(NO.0109)指定。
a:刀尖角度:可选择80度、60度、55度、30度、29度、0度,用2位数指定。
本指定是状态指定,在另一个值指定前不会改变。
FANUC系统参数(NO.0724)指定。
如:P(02/m、12/r、60/a)△dmin:最小切削深度本指定是状态指定,在另一个值指定前不会改变。
FANUC系统参数(NO.0726)指定。
i:螺纹部分的半径差如果i=0,可作一般直线螺纹切削。
k:螺纹高度这个值在X轴方向用半径值指定。
△d:第一次的切削深度(半径值)l:螺纹导程(与G32)2. 功能螺纹切削循环G90 外直径的切削循环(G90)1. 格式直线切削循环:G90 X(U)___Z(W)___F___ ;按开关进入单一程序块方式,操作完成如图所示 1→2→3→4 路径的循环操作。
U 和 W 的正负号 (+/-) 在增量坐标程序里是根据1和2的方向改变的。
锥体切削循环:G90 X(U)___Z(W)___R___ F___ ;必须指定锥体的“R” 值。
切削功能的用法与直线切削循环类似。
2. 功能外园切削循环。
1. U<0, W<0, R<02. U>0, W<0, R>03. U<0, W<0, R>04. U>0, W<0, R<0G92 切削螺纹循环 (G92)1.格式直螺纹切削循环:G92 X(U)___Z(W)___F___ ;螺纹围和主轴 RPM 稳定控制 (G97) 类似于 G32 (切螺纹)。