ABB-CBM5.0 GSD文件导入步骤
新手学习ABB工业机器人程序,你要先学会它的程序导出和导入原理

新手学习ABB工业机器人程序,你要先学会它的程序导出和导
入原理
对于新手来说,学习编程方法已经很吃力了,所以在学习编程之前,你要从最基本的开始,比如说这个程序的导入和导出,你可能搞不懂它的运作流程,导致学习起来更费劲,接下来我就对这个进行一下详细说明
首先我们现在ABB的示教器上建一个程序出来
示教器首页,点击左上角的菜单键,显示主菜单,如下图
点击程序编辑器,得到如下图
我们选择新建后得到一个程序,如下图
程序建好后,现在显示的只是一部分,那我们把它导出,方法如下
点击任务与程序,选择文件得到如下图
选择另存程序为
将优盘插入到示教器上,位置如下
然后点击向上翻页,直到找到你的优盘
然后选择U盘,文件名可以自己起一个,然后点击确定,这样就保存到U盘里了,去优盘里找到该文件
打开后我们看一下
我们得到两个文件,现在我对这两个文件说明一下,第一个MainModule这个文件存放的是你的程序,是属于一个模块文件,既然它叫模块,那么就说明可以有好几个模块,而NewProgramName 是个导入文件,也就是说从优盘往机器人导入的时候,显示的是这个文件,这个文件导入时就会把模块文件导入进去,说白了就是我这里有一个筐,里面可以放好多鸡蛋,我们把这个筐打开一下(可以选择记事本打开),大家就会明白
是不是和那个模块名字一样囊,如果外面模块名字改变后,相对应的这个里面的名字也得做一下改变,否则模块不会跟着一起导入的。
这就是ABB导出程序,以及导入原理。
如何将新的 PROFIBUS 或 PROFINET GSD 文件集成到 STEP 7 硬件配置中
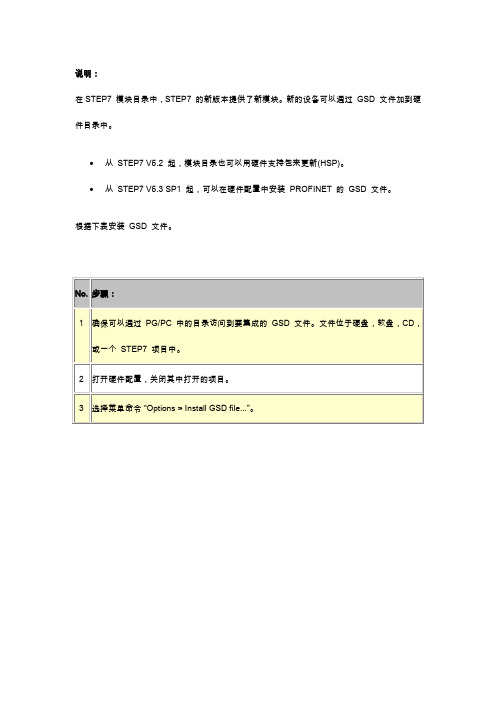
说明:
在STEP7 模块目录中,STEP7 的新版本提供了新模块。
新的设备可以通过GSD 文件加到硬件目录中。
∙从STEP7 V5.2 起,模块目录也可以用硬件支持包来更新(HSP)。
∙从STEP7 V5.3 SP1 起,可以在硬件配置中安装PROFINET 的GSD 文件。
根据下表安装GSD 文件。
在硬盘上保存GSD 文件:
GSD 文件保存在硬盘目录“<Drive:>\ Program Files\Siemens\Step7\S7DATA\GSD”下。
图 03
已组态从站的GSD 文件名:
在硬件配置中双击已组态的从站。
GSD 文件的名字位于“Properties - DP slave”对话框中订货号的右侧。
图 04
关于GSD 文件的安装要求和过程,重写和恢复重写的更多信息可以在下面的文档中得到: “使用STEP7 V5.4配置硬件和通讯连接”( ID: 18652631) 3.9章使用GSD 文件。
导入GSD和EDDL文件说明
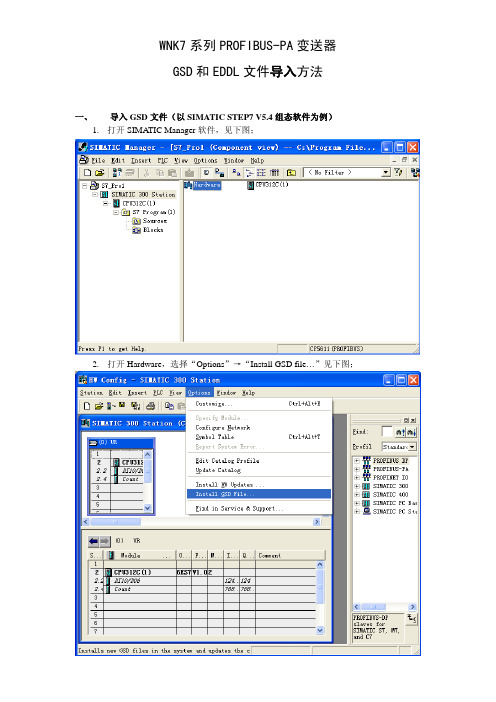
WNK7系列PROFIBUS-PA变送器GSD和EDDL文件导入方法一、 导入GSD文件(以SIMATIC STEP7 V5.4组态软件为例)1. 打开SIMATIC Manager软件,见下图;2. 打开Hardware,选择“Options”→“Install GSD file…”见下图;3.在“Install GSD files”界面中,选择GSD文件所在的文件夹即“WNK7_Pressure_GSD_EDDL文件”文件夹,在列表中可看到“WNK0B6E.gsd”,点击“WNK0B6E.gsd”,然后点击“Install”按钮即可安装,见下图;4.GSD文件安装好后,在“HW Config”界面的右边的设备列表中即可看到“WNK Sertial Pressure Transmitter”。
二、导入EDDL文件(以SIMATIC PDM 6.0管理软件为例)1. 加入变送器生产厂商信息;a)、以记事本方式用打开manufacturer.csv文件,manufacturer.csv文件一般在SIMATIC软件的安装目录下的S7BIN文件夹下,如:“ C:\Program Files\Siemens\Step7\S7BIN”;b)、将光盘目录下的“WNK厂商信息.csv”中的内容拷贝到“manufacturer.csv”文件的尾部并保存,如下图;2.选择“开始”→“所有程序”→“SIMATIC”→“SIMATIC PDM”→“Manage device catalog”,在“SIMATIC PDM Manager Device Catalog”界面中点击“Browse…”按钮选择EDDL文件所在的文件夹即“WNK7_Pressure_GSD_EDDL文件”文件夹,在列表中可看到“Anhui WNK Electronic Engineering Co.,Ltd”, 点击“Select All”按钮,如下图;3. 点击“OK”按钮,如下图;3. 再点击“OK”按钮进行安装,如下图;点击“确定”按钮完成安装。
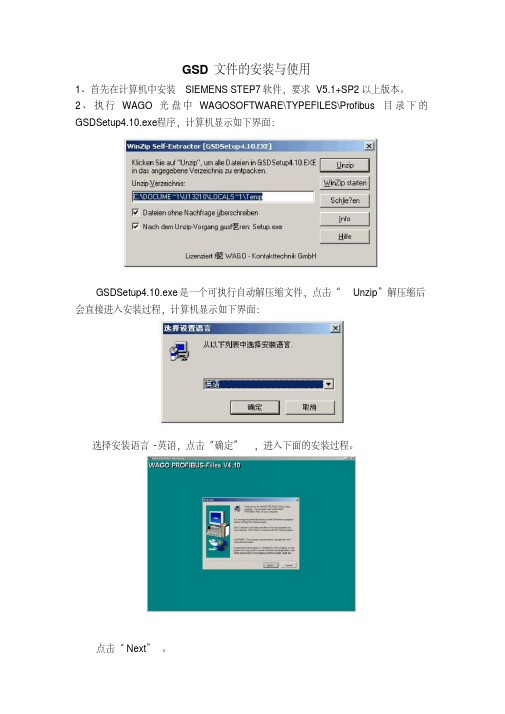
GSD文件的安装与使用剖析
5、关于“ WAGO 750-833”中 I/O 模块列表中带“ PFC”的选项: 750-833 具有可编程功能,可以运行控制程序。在 SIEMENS STEP7 配置
举例来说,在一个站中若有 2 个 750-402(4DI ),那么在配置时,先配置一 个“750-402”,然后再配置一个 “* 750-402 ” 。SIEMENS STEP7 分配给“ 750-402” 1 个字节的输入地址,而对“ * 750-402”不分配地址。“750-402”使用所分配 1 个字节输入地址的前 4 位,“ * 750-402” 使用已分配给“ 750-402” 的 1 个字节 输入地址的后 4 位。
750-833, 750-343 的硬件配置与 750-333 相同。 5、关于 I/O 模块列表中带“ * ”的选项:
在“ WAGO 750-333” 、“WAGO 750-833” 与“WAGO 750-343”中的 I/O 模块列表中有一些带有“ * ”的模块型号,如“ * 750-400” 、“* 750-402” 、“* 750-501” 、“ * 750-504 ”等。在 WAGO I/O 模块中有一些 2 点或 4 点的数字量 输入 /输出模块,如 750-400(2DI )、750-402(4DI )、750-501( 2DO)、750-504 ( 4DO)等,这些模块所占的 I/O 地址为 2bit 或 4bit,均小于 1 个字节。SIEMENS STEP7 软件对 I/O 模块列表中每个 2 点或 4 点的数字量输入 /输出模块均分配 1 个字节的输入或输出地址,这样会导致 PLC 中 I/O 地址的浪费。使用带“ * ”的 选项可以避免 PLC 中 I/O 地址的浪费。
ABB_800M CUP315 GSD 通信

800M与CPU315DP通讯设置步骤创建新硬件库,如图1,在程序根目录下的Libraries目录下的Hardware目录处,鼠标右键单击,在弹出菜单中选择New Library。
图1将新硬件库命名为sms2,创建后如图2所示,右键单击其子目录Hardware Types,选择Insert/Replace Hardware Types。
图2在弹出的Insert Hardware Definitions对话框中,选择与硬件对应的GSD文件,此处选择SIEM8176.GSE (E代表语言环境为英语),如图3。
图3在弹出的Device Import Wizard中,点击Next按钮,如图4。
图4然后弹出Device Information,如图5,此界面中可以更改硬件在项目树中的名称和图标,如果没有特殊要求,可以不做修改,点击Next。
图5在弹出的Module selection对话框中,可以选择程序中需要的模块。
如图6。
选择完毕后,点击Next。
图6在I/O setting对话框中,需要定义模块的通道。
如图7中红色线圈出的部分。
图7此处的GSD byte, word 是指GSD 文件中的byte, word 字节,即传动中相对应的状态字,拆分到AC800M 中新的channel 对应的状态字。
16byte OutPut 可以按apply standard conversion 产生一组通道。
再次选择64byte output 按apply standard conversion 产生不同的通道。
接下来弹出的诊断设置对话框可不进行修改。
如图8。
图8图9,图10对话框显示的是修改信息,直接点击Next及Finish。
至此,新的硬件库创建完成。
图9图10在CBM程序的硬件中找到需要插入CPU315的控制站,右键单击ConnectedLibraries,选择弹出的Connect Library,如图11,选择刚刚创建的sms2硬件资源库。
西门子PLC与ABB变频器之间的现场总线通讯技术
西门子PLC与ABB变频器之间的现场总线通讯技术640吨推进式铸锭加热炉是公司投资新建的铝及铝合金铸锭轧制前的加热和部分铸锭的均热处理的加热炉,炉气温度均匀性要求在±5℃,循环风速场的均匀性直接决定炉气温度的均匀性,循环风机采用Profibus-DP过程现场总线通讯技术,自动化控制单元使用西门子的S7-300PLC与变频器使用ABB公司的ACS510变频器。
标签:变频器;PLC;现场总线1 空气循环风机及控制系统描述1.1 空气循环风机为强化热交换保证产品质量,在炉顶装有高温离心式风机(每区2台),风机采用ABB公司的变频器调速。
低温启动时采用低速,便于启动;高温时采用高速以缩短加热时间,可提高温度均匀性和生产率,具有调速方便、加热效率高、工作可靠的特点,也可按照额定电流设置变频器,根据炉气温度的变化连续调速。
采用该系统的炉子,炉气温度和铸锭温度的均匀性可达≤±5℃以内。
为方便风机维护,炉上配备手动干油站,每区1套。
每套组件的内部轴承安装在水冷的轴承座上,并且每个元件都是密封的,防止油或水进入炉内。
风机的每根轴都是由两个日本NSK轴承支撑。
1.2 控制系统风机最高工作温度650℃。
炉群管理计算机可以和整个工厂的L3级通过以太网连接,采用TCP/ IP 通讯协议,作为数据查询和记录的管理计算机。
并安装炉群控制系统数据软件。
上位机:1套。
在PLC处增加一个上位管理系统,主要对加热炉管理与监控。
上位机的PC机主要配置如下(高于或等于以下配置,采用市场主流配置):CPU:2.5G显存:128M内存:512M硬盘:120G显示器:19”(液晶)光驱:DVD+RW键盘、鼠标通用10/100M 快速以太网接口软件包括(软件版本为高于或等于以下版本,以下所有文本的版本相同):WINDOWS XPIntouch 10.0控制系统选用SIEMENS公司的S7-400系列程控器,S7-400主站与各个子站间采用PROFIBUS-DP连网。
ABB机器人程序导入及通讯配置

ABB机器人程序导入及通讯配置目录•机器人程序导入概述•ABB机器人程序导入步骤•通讯配置基本概念•ABB机器人通讯配置方法•程序导入与通讯配置常见问题及解决方案•总结与展望01机器人程序导入概述导入目的与意义实现机器人自动化通过导入程序,可以使机器人按照预设的轨迹和动作进行自动化操作,提高生产效率和准确性。
方便程序管理和维护将程序导入机器人控制器后,可以方便地进行程序的修改、调试和管理,提高程序的可维护性。
促进机器人技术应用程序导入是实现机器人技术应用的重要环节,有助于推动机器人在各个领域的应用和发展。
准备程序文件连接机器人控制器导入程序文件验证程序导入流程简介将编写好的机器人程序保存为特定格式的文件,如RAPID程序文件。
将准备好的程序文件导入到机器人控制器中。
通过编程设备或电脑与机器人控制器建立通讯连接。
启动机器人,验证导入的程序是否正确执行。
不同型号和版本的机器人可能需要不同的程序格式和导入方法。
确认机器人型号和控制器版本用于连接电脑和机器人控制器,实现程序文件的传输。
准备编程设备和通讯线缆了解并熟悉所使用的机器人编程语言,以便编写和修改程序。
熟悉机器人编程语言在导入程序前,确保机器人周围的环境安全,避免意外发生。
确保安全环境准备工作02ABB机器人程序导入步骤连接机器人与电脑确保电脑与机器人控制器之间的物理连接正确,通常使用以太网或USB连接。
检查连接状态,确保通讯正常。
选择正确的通讯接口根据机器人控制器的型号和配置,选择正确的通讯接口,如TCP/IP、DeviceNet等。
在电脑上配置相应的通讯参数,如IP地址、端口号等,以确保与机器人控制器的通讯顺畅。
上传程序文件至机器人使用ABB提供的机器人软件(如RobotStudio)或控制器自带的文件传输功能,将程序文件上传至机器人控制器。
在电脑上准备好要上传的机器人程序文件,通常是.rap或.mod等格式。
等待文件传输完成,确保文件完整无误。
CBF操作手册

课程设计CBF操作手册秦宇飞一、CBF组态的顺序及内容如果一下写得很复杂,不容易调。
逐渐完善程序的功能,反复多次)14 将仿真的程序移动到真实的控制器上增加变量输入和输出的硬件连接。
将变量和通道对应起来。
重新命名变量或将资源指定到真实控制器15 完成课程设计报告16 答辩演示Digivis仿真二、软件安装及配置1. 装软件CBF注意:不要安装安全锁注意:安装前记住自己电脑的用户名和密码。
2. 安装IE73. 安装JAVA虚拟机4. 安装虚拟网卡添加硬件设置:5. 调整屏幕分辩率到1280x1024 目的:为了使DigiView的画面显示好看.把隐藏的钩去掉三、软件使用2. CBF设置注意:子网掩码3. 仿真控制器设置保证仿真控制器的服务已启动http://localhost:8888/输入站ID后:4. 建新项目1)建立项目软件和硬件结构a) 项目树结构A.控制器B.操作员站C.公共显示画面b) 组态的内容:⏹画面组态⏹逻辑组态⏹硬件组态c) 增加项目树结点:在公共显示池加画面:开始画面组态在过程站加程序:开始逻辑组态继续增加程序:d) 加了操作员站、公共显示池和过程站的界面:e) 开始硬件组态:f) 加了仿真控制器和操作员站的界面:g) 硬件结构和项目树的对应---资源指定指定之后的界面:h) 设置IP地址、资源ID等i) 增加新模件加800F控制器增加FI830,Profibus通讯模件从GSD文件导入模件描述文件。
GSD文件与通讯模件CI801,CI830,CI840有关,每种通讯模件对应一个GSD文件。
如果选用的通讯模件是CI801,就要使用CI801的GSD文件。
选择最高版本的GSD文件。
导入后,即增加新的结点。
增加通讯模件和IO模件。
通讯模件是必要加入了,比如这里加入了CI840,其它IO模件根据实际需要选择。
j) 通道分配选择模件I/O编辑DI模件的通道拆分:这里的模件有16个DI通道,每个通道占1位,16个通道占16位,共计2个字节。
ABB使用步骤

ABB使用步骤ABB使用步骤1 01 9 插入组态CONF 名字PS2 01 HUBE插入冗余过程站3 01 HUBE插入图形库宏 P-MAC4 01 HUBE插入公共显示池 P-CD5 01 HUBE插入用户功能池 P-FB6 01 HUBE插入三个操作员站 D-OS切换到硬件结构中1 插入3个操作员站,并制定资源 OS1,OS2,OS32 插入AC800FR 右击参数名称改为PS,CPU类型改为PM802F双击PS到资源配置根据设备情况资源1 P槽插入SA811FR电源模块2 E1槽插入EI813FR以太网模件3 F1槽插入FI830FR Profibus模件冗余双击FI模块到模块详细1 右击长方形插入PROFIBUS主站确认2 双击长方形到具体配置3 将CI801_GSD-file解压到Abb_08D3_v131.GSD4 右击PROFIBUS DPV1主设备插入从设备选PROFI-DEV确认选择路径为Abb_08D3_v131.GSD所在位置5 导入此GSD文件6一共插入9个,根据DCS图纸来决定在S:F1 FI830FR下的PRIFI-M-DEV下插入PROFIBUS从设备,双击到内存配置最大输入字节改为1281插入CI801,修改名称为CI8012插入DI810,修改名称为DI101 (AI810是普通的AI830是RTD AI835是TC)3插入DI810,修改名称为DI102 右击参数中的用户中POSITION改为24插入DO810,修改名称为DO101 右击参数中的用户中POSITION改为3等等到下面1右击MOD ADDR 1 AI810 选择I/O编辑然后选择输入输出类型在灰色空白处右击选择插入元素AI810选 BYTE0 2.。
14的中的INT2然后在信号表中找到模块点对应的信号代码复制到I/O编辑的变量中3在后面注释中选中过程印象确认。
S7-300 如何通过GSD 文件实现PROFIBUS DP 主从通讯

图1 GSD 文件下载界面打开SIMATIC Manager,进入硬件组态界面,选择菜单栏的“Options”->“Install GSD File…”,如图2 所示。
图 2 安装GSD 文件进入GSD 安装界面后,选择“Browse…”,选择相关GSD 文件的保存文件夹,选择对应的GSD 文件(这里选择语言为英文的“*.GSE”文件),点击“Install”按钮进行安装。
图 3 选择安装GSD 文件安装完成后可以在下面的路径中找到CPU314C-2DP,如图4:图 4 硬件目录中的保存路径3 CP342-5 做主站采用GSD 方法实现PROFIBUS DP 通信3.1 网络拓扑介绍PROFIBUS DP 主站由CPU314+CP342-5 组成,其中CP342-5 做主站。
PROFIBUS DP 从站由CPU314C-2DP 组成,集成的DP 接口做从站。
网络拓扑图如下:图 5 网络拓扑图3.2 从站组态首先插入SIMATIC S7-300 站,添加CPU314-2DP,双击DP 接口,分配一个PROFIBUS 地址,然后在“Operating Mode”中选择“DP salve”模式,进入“Configuration”标签页,新建两行通信接口区,如图6 所示:图 6 从站通信接口区注意:上述从站组态的通信接口区和主站导入的GSD 从站的通信接口区在顺序、长度和一致性上要保持一致。
3.3 主站组态及编程3.3.1 主站组态首先插入SIMATIC S7-300 站,添加CPU314 以及CP342-5,然后双击CP342-5,将“Operating Mode”设置为“DP Master”。
新建一条PROFIBUS 网络。
然后从硬件目录中选择CPU314C-2DP GSD 文件(路径参照图4),添加到新建的PROFIBUS 网络中,为其分配PROFIBUS 地址,该地址要与前文的从站地址一致。
ABB变频器上传和下载步骤

ABB变频器上传和下载步骤ABB变频器上传和下载步骤
如何将已经设置好电机需要上传到CDP-312操作面板上:
1.激活可选设备的通讯
确认98.02COMM.MODULELINK设定为FIELDBUS
98.07COMMPROFILE设定为ABBDRIVES
2.按LOC/REM切换到L本地控制状态;
3.按FUNC进入功能模式;
4.按单双箭头键进入UPLOAD功能,按ENTER执行上传,完成后自动切换到当前信号显示模式;、
5.如果要将控制盘从一个传动单元移开前,确认控制盘处于远程控制模式状态(可以按LOC/REM进行改变)
如何将数据从控制盘下载到传动单元:
1.将存有上传数据的控制盘连接到传动设备;
2.确认处于本地控制模式(可以按LOC/REM选择);
3.按FUNC进入功能模式;
4.进入DOWNLOAD下载功能,按ENTER执行下载。
1。
安装和删除GSD文件的方法
安装和删除GSD文件的方法
安装和删除GSD文件的方法:
一,安装GSD文件。
在安装GSD文件时,不能打开或者编辑工程,如果有打开的工程,请关闭工程之后,再行安装。
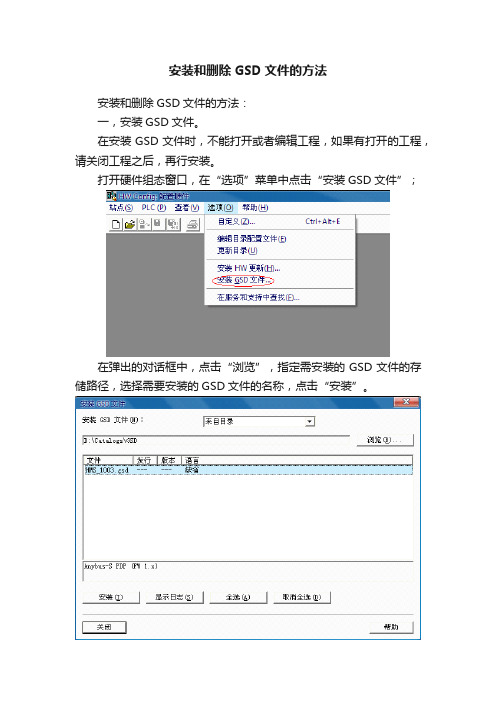
打开硬件组态窗口,在“选项”菜单中点击“安装GSD文件”;
在弹出的对话框中,点击“浏览”,指定需安装的GSD文件的存储路径,选择需要安装的GSD文件的名称,点击“安装”。
安装成功之后,会弹出相应的的提示信息。
安装完毕之后,可以再右侧的配置组件中查看到刚刚安装的GSD 文件相应的组件。
二,删除GSD文件
删除之前,确认要删除的GSD文件信息。
打开SETP7安装路径,进入相应的GSD文件夹,
如“C:\Program Files\Siemens\Step7\S7DATA\GSD”,
找出要删除的GSD文件并删除。
打开硬件组态窗口,在“选项”菜单中点击“更新目录”;
更新完成之后,没有提示信息弹出,可以检查右侧组件栏中,是否还存在想要删除的GSD文件相应的组件。
(全文完)。
iFIX - ABB CBM组态指南

1-J BABB AC800M 3.2与Intellution iFIX3.0组态指南曹卫锋2004/10/202-J B内容⏹介绍采用IFIX3.0作为ABB AC800M 控制系统的SCADA/HMI 软件的方案。
⏹介绍ABB OPC Server 的设置,关于CBM 的详细组态,请参考CBM 的培训课程。
⏹介绍iFIX 的OPC 配置和组态及如何实现快速批量组态。
⏹介绍iFIX 数据库组态及如何实现快速批量组态。
⏹介绍冗余服务器的设置。
3-JBAC800M/iFIX方案4-J B为什么选择OPC 作为通讯接口⏹不再需要任何驱动,即插即用,真正解决了客户在使用多种不同厂家的产品时的兼容性和互操作性问题。
⏹多个客户端可以同时和多个服务器通讯。
⏹高速性能,Server 和Client 之间的通讯速度可达20000Tags/s 。
⏹ABB AC800M 控制系统提供完善的OPC 通讯方案,跟多种HMI/SCADA 软件有大量成功的案例,如iFIX ,Intouch ,Citect等。
5-J BIndustrialIT AC800M OPC 解决方案⏹ABB 提供标准的2.0版本的OPC DA 和AE 服务器,供各种OPC 客户端访问。
⏹OPC Data Access Server 从AC800M/C 控制器采集数据,供OPC Client 访问。
⏹OPC Alarm and Event Server 提供报警和事件的OPC Server,供OPC Alarm&Event Client 访问。
对于大部分的HMI/SCADA 软件的事件和报警均在上位软件中实现,但在某些特殊情况下,比如电厂的SOE ,事件必须控制器中产生,然后通过OPC AE Server 供Client 访问。
6-J BIFIX OPC 解决方案⏹IFIX PDB OPC Client 软件名称OPC Power Tool,又称为OPC Client Driver ,既作为OPC 客户端连接第三方OPC Server,又作为第三方OPC Client 连接PDB 的中间OPC Server,产品包含在I/O Driver & OPC Server CD 中。
ABB工业机器人单独导入程序方法及步骤

ABB工业机器人单独导入程序方法及步骤
在进行数据恢复时,要注意的是,备份数据是具有唯一性的,不能讲一台机器人的备份恢复到另一台机器人中去,这样的话,会造成系统故障。
但是,也常会将程序和I/O的定义做出通用的,方便在批量生产使用时,可以通过分别单独导入程序和EIO文件来解决实际需要。
一、单独导入程序操作步骤:第1步:在主菜单下,选择程序编辑器
第2步:点击MainMoudle模块
第3步:打开文件菜单,点击加载模块,从备份目录RAPID下加载所需要的程序模块,如RAPID程序模块
二、单独导入EIO文件操作步骤:第1步:在ABB主菜单页面下,点击控制面板,选择配置
第2步:打开文件菜单
第3步:点击加载参数
第4步:选择删除现有参数后加载
第5步:在备份目录SYSPAR找到EIO.cfg文件,然后单击“确定”按钮
第6步:单击是,重启后完成信号导入。
ABBrobotstudio使用详细步骤

搬运码垛工作站建模1、创建机器人系统2、创建动态输送链3、创建动态夹具4、工作站逻辑连接5、添加IO(设置好需重启)6、示教目标点(同步到RAPID)7、RAPID编程一、创建机器人系统1、创建空工作站2、导入IRB 260机器人模型3、从布局创建机器人系统,勾选Chinese和709-1网络二、创建动态输送链1、添加输送链并修改位置2、创建600*400*200的物料并修改位置3、添加一个smart组件4、添加source组件5、设置物料本地原点6、添加LINEMOVER和QUEUE组件7设置LINEMOVER属性8、添加面传感器组件9、设置输送链不能被传感器检测10、设置SC_输送链的属性连接11、设置信号连接12、添加信号处理组件,用于检测传感器下降沿13、传感器下降沿触发source进行copy14、传感器与SC输送链的输出联系15、添加仿真开始结束组件,用于激活传感器16、添加置位复位组件,对仿真开始结束信号进行保持17、18、进行仿真设定选择SC——输送链进行验证三、创建动态夹具1、先制作一个吸盘模型,然后设置成工具,并安装到机器人法拉盘2、添加SMART组件3、添加ATTACHER和DETACHER组件4、设置属性5、添加一个线传感器组件6、线传感器设置属性7、设置吸盘工具不能被传感器检测8、把线传感器安装到吸盘(不更新位置,保持当前位置)9、设置属性连接10、添加信号及连接11、添加信号处理取非和锁定组件12、继续信号连接13、添加一个示教物料14、应用手动线性验证SC_工具四、工作站逻辑连接五、参考代码MODULE MainMoudlePERS tooldatatGrip:=[TRUE,[[0,0,200],[1,0,0,0]],[25,[0,0.00109327,116.889],[1,0,0,0],0,0,0]];!吸盘工具数据PERS loaddata LoadEmpty:=[0.01,[0,0,1],[1,0,0,0],0,0,0];PERS loaddata LoadFull:=[40,[0,0,50],[1,0,0,0],0,0,0];!有效载荷数据PERS robtarget pHome:=[[1620.00,-0.00,1331.59],[1.27986E-06,-0.707107,-0.707107,1.27986E-06],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];!基准点PERS robtarget pActualPos:=[[1620,-1.87531E-14,1331.59],[1.27986E-06,-0.707107,-0.707107,1.27986E-06],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];!实际点PERS robtargetpPick1:=[[1488.007792464,376.826660408,476.964684195],[0,0.707106307,0.7071 07256,0],[0,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1路拾取目标点PERS robtarget pPlace1:=[[-292.446,1263.27,55.4492],[0,0.707107,0.707106,0],[1,0,2,0],[9E+09,9E+09,9E+09, 9E+09,9E+09,9E+09]];!1路放置基准点PERS robtarget pBase1_0:=[[-292.446294945,1263.272085268,55.449220723],[0,0.707107387,0.707106176,0],[1, 0,2,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1路放置0度姿态PERS robtarget pBase1_90:=[[-391.976797324,1362.469634994,55.449159414],[0,1,-0.000030621,0],[1,0,3,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1路放置90度姿态PERS robtarget pPick2:=[[1488.013130905,-358.406014736,476.965039287],[0,0.707106307,0.707107256,0],[-1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS robtarget pPlace2:=[[-317.378,-1857.99,55.449],[0,0.707108,0.707106,0],[-2,0,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];PERS robtarget pBase2_0:=[[-317.378137718,-1857.993871961,55.448967354],[0,0.707107745,0.707105817,0],[-2,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS robtarget pBase2_90:=[[-407.525988074,-1755.902485322,55.449282402],[0,1,-0.000031217,0],[-2,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS speeddata MinSpeed:=[1000,300,5000,1000];PERS speeddata MidSpeed:=[2500,400,5000,1000];PERS speeddata MaxSpeed:=[4000,500,5000,1000];!搬运速度定义PERS bool bPalletFull1:=FALSE;PERS bool bPalletFull2:=FALSE;!逻辑布尔量,拾取后为UE,放置后为FALSEPERS num nCount1:=1;PERS num nCount2:=1;!输送链计数PROC Main()rInitAll;WHILE TRUE DOIF diBoxInPos1=1 AND diPalletInPos1=1 AND bPalletFull1=FALSE THEN rPick1;rPlace1;ENDIFIF diBoxInPos2=1 AND diPalletInPos2=1 AND bPalletFull2=FALSE THEN rPick2;rPlace2;ENDIFWaitTime 0.1;ENDWHILEENDPROCPROC rInitAll()Reset doGrip;pActualPos:=CRobT(\tool:=tGrip);pActualPos.trans.z:=pHome.trans.z;MoveL pActualPos,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pHome,MidSpeed,fine,tGrip\WObj:=wobj0;bPalletFull1:=FALSE;nCount1:=1;bPalletFull2:=FALSE;nCount2:=1;ENDPROCPROC rPick1()MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPick1,MinSpeed,fine,tGrip\WObj:=wobj0;Set doGrip;WaitTime 0.3;GripLoad LoadFull;MoveL Offs(pPick1,0,0,400),MinSpeed,z50,tGrip\WObj:=wobj0; ENDPROCPROC rPick2()MoveJ Offs(pPick2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPick2,MinSpeed,fine,tGrip\WObj:=wobj0;Set doGrip;WaitTime 0.3;GripLoad LoadFull;MoveL Offs(pPick2,0,0,400),MinSpeed,z50,tGrip\WObj:=wobj0; ENDPROCPROC rPlace1()rPosition1;MoveJ Offs(pPlace1,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveL pPlace1,MinSpeed,fine,tGrip\WObj:=wobj0;Reset doGrip;WaitTime 0.3;GripLoad LoadEmpty;MoveL Offs(pPlace1,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; nCount1:=nCount1+1;IF nCount1>20 THENbPalletFull1:=TRUE;ENDIFENDPROCPROC rPlace2()rPosition2;MoveJ Offs(pPlace2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPlace2,MinSpeed,fine,tGrip\WObj:=wobj0;Reset doGrip;WaitTime 0.3;GripLoad LoadEmpty;MoveL Offs(pPlace2,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveJ Offs(pPick2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; nCount2:=nCount2+1;IF nCount2>20 THENbPalletFull2:=TRUE;ENDIFENDPROCPROC rPosition1()TEST nCount1CASE 1:pPlace1:=Offs(pBase1_0,0,0,0);CASE 2:pPlace1:=Offs(pBase1_0,600+10,0,0);pPlace1:=Offs(pBase1_90,0,400+10,0);CASE 4:pPlace1:=Offs(pBase1_90,400+10,400+10,0); CASE 5:pPlace1:=Offs(pBase1_90,800+20,400+10,0); CASE 6:pPlace1:=Offs(pBase1_0,0,600+10,200);CASE 7:pPlace1:=Offs(pBase1_0,600+10,600+10,200); CASE 8:pPlace1:=Offs(pBase1_90,0,0,200);CASE 9:pPlace1:=Offs(pBase1_90,400+10,0,200);CASE 10:pPlace1:=Offs(pBase1_90,800+20,0,200);CASE 11:pPlace1:=Offs(pBase1_0,0,0,400);CASE 12:pPlace1:=Offs(pBase1_0,600+10,0,400);CASE 13:pPlace1:=Offs(pBase1_90,0,400+10,400);CASE 14:pPlace1:=Offs(pBase1_90,400+10,400+10,400); CASE 15:pPlace1:=Offs(pBase1_90,800+20,400+10,400); CASE 16:pPlace1:=Offs(pBase1_0,0,600+10,600);CASE 17:pPlace1:=Offs(pBase1_0,600+10,600+10,600);pPlace1:=Offs(pBase1_90,0,0,600);CASE 19:pPlace1:=Offs(pBase1_90,400+10,0,600);CASE 20:pPlace1:=Offs(pBase1_90,800+20,0,600);DEFAULT:TPErase;TPWrite "the Counter of line 1 is error,please check it!"; Stop;ENDTESTENDPROCPROC rPosition2()TEST nCount2CASE 1:pPlace2:=Offs(pBase2_0,0,0,0);CASE 2:pPlace2:=Offs(pBase2_0,600+10,0,0);CASE 3:pPlace2:=Offs(pBase2_90,0,400+10,0);CASE 4:pPlace2:=Offs(pBase2_90,400+10,400+10,0);CASE 5:pPlace2:=Offs(pBase2_90,800+20,400+10,0);CASE 6:pPlace2:=Offs(pBase2_0,0,600+10,200);CASE 7:pPlace2:=Offs(pBase2_0,600+10,600+10,200);CASE 8:pPlace2:=Offs(pBase2_90,0,0,200);CASE 9:pPlace2:=Offs(pBase2_90,400+10,0,200);CASE 10:pPlace2:=Offs(pBase2_90,800+20,0,200);CASE 11:pPlace2:=Offs(pBase2_0,0,0,400);CASE 12:pPlace2:=Offs(pBase2_0,600+10,0,400);CASE 13:pPlace2:=Offs(pBase2_90,0,400+10,400);CASE 14:pPlace2:=Offs(pBase2_90,400+10,400+10,400);CASE 15:pPlace2:=Offs(pBase2_90,800+20,400+10,400);CASE 16:pPlace2:=Offs(pBase2_0,0,600+10,600);CASE 17:pPlace2:=Offs(pBase2_0,600+10,600+10,600);CASE 18:pPlace2:=Offs(pBase2_90,0,0,600);CASE 19:pPlace2:=Offs(pBase2_90,400+10,0,600);CASE 20:pPlace2:=Offs(pBase2_90,800+20,0,600);DEFAULT:TPErase;TPWrite "the Counter of line 1 is error,please check it!"; Stop;ENDTESTENDPROCPROC rModify()MoveJ pHome,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pPick1,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase1_0,MinSpeed,fine,tGrip\WObj:=wobj0; MoveJ pBase1_90,MinSpeed,fine,tGrip\WObj:=wobj0; MoveJ pPick2,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase2_0,MinSpeed,fine,tGrip\WObj:=wobj0; MoveJ pBase2_90,MinSpeed,fine,tGrip\WObj:=wobj0; ENDPROCENDMODULE。
PROFIBUS-DP与ABB变频器之间通讯设置步骤_图文(精)

PROFIBUS-DP与ABB变频器之间通讯设置步骤_图文(精)PROFIBUS-DP与ACS800通讯设置步骤一.PROFIBUS-DP现场总线控制器PLC的设置:第一步:安装ABB变频器GSD文件 ABB_0812.GSD(可以在变频器的网站上下载到,使用STEP7组态软件,进入Hardware Configure,将RPBA-01的GSD(设备数据库文件导入STEP7的编程环境中,点击options——install GSD file 将ABB变频器的GSD文件导入STEP7中。
第二步:硬件组态(如:选定S7-315-2DP为主站系统,默认地址为2,将ABB的RPBA-01组态到S7-315-2DP为主站的DP网上,并选定使用的PPO类型,一般用PPO4,设定站点网络地址,然后编译存盘。
第三步:PLC主机从从站读取输入信息并把输出信息反送给从站,因此在PLC主程序OB1中调用两个系统功能块SFC14和SFC15来读写这些数据,实现到变频器的通信控制,并在PLC程序中建立一个数据块,用于变频器的数据通信。
可以通过控制字来实现传动设备的控制。
第三步:在2号从站的参数设置中,将Operation Mode改为Vendor Specific(即ABB传动协议;第四步:其它为默认配置;第五步:将配置下载到主站中。
通过以上几步的设置主站对从站2的输出区(OUTPUT的数据结构为:Output的第一个字是用于ABB 传动通信协议的控制字CW;Output的第二个字是变频器的给定值REF1;Output的第三个字是变频器的给定值REF2;Output 的第四个字是变频器的给定值REF3(由ACS800变频器参数90.01决定;Output的第五个字是变频器的给定值REF4(由ACS800参数90.02决定;Output的第六个字是变频器的给定值REF5(由ACS800参数90.03决定。
主站对从站2的输入区(INPUT的数据结构为:Input的第一个字是用于ABB 传动通信协议的状态字SW;Input的第二个字是变频器的实际值ACT1(由ACS800参数92.02决定;Input的第三个字是变频器的实际值ACT2(由ACS800参数92.03决定;Input的第四个字是变频器的实际值ACT3(由ACS800参数92.04决定; Input的第五个字是变频器的实际值ACT4(由ACS800参数92.05决定;Input的第六个字是变频器的实际值ACT5(由ACS800参数92.06定二.ACS800变频器的参数设置步骤:第一步:将ACS800变频器PROFIBUS适配器模块安装到变频器上;第二步:按照适配器模块的用户手册调整硬件(如站号等第三步:此时需要在本地模式下(按LOC/REM选择设定和确认以下参数:(按FAR 进入参数选择模式,用单双箭头选择,ENTER键进入参数或参数组的设定首先将参数98.02改为FIELDBUS(表示RPBA-01通讯摸板被激活;;并确定参数98.07为ABB DRIVES(作用是选择传动单元的通讯协议;第四步:修改51组参数(51这组参数只有安装了现场总线适配器模块并且该模块被参数98.02激活后才是可见的,并且被自动配置可以不用设置。
如何获取ABB机器人Profinet的GSD文件的详细方法过程概述
如何获取ABB机器人Profinet的GSD文件的详细方
法过程概述
profinet的gsd文件获取如下:
打开robotstudio,addin下,找到robotware,右击
找到如下路径...\DistributionPackages\ABB.RobotWare-6.06.1025\RobotPackages\RobotWare_RPK_6.06.1025\utility\service\GSDML
为需要的gsdml文件
1)机器人需要有888-2或者888-3选项(使用控制器网口),或者840-3选项(使用Anybus网口)
2)此处举例888选项
3)机器人控制器有如下网口,其中
X2 是服务端口,ip固定192.168.125.1
X3连接了示教器
X7连接了安全板
X9连接了轴计算机
4)Profinet可以连接WAN口或者LAN3口,根据设置连接
5)此处举例连接WAN口
6)控制面板,配置,主题选择communication
7)进入IPSETTING
8)点击ProfinetNetwork
9)修改ip并选择对应网口
10)重启
11)控制面板,配置,主题I/O ,PROFINET InternalDevice
12)配置输入输出字节数。
和PLC那边设置一致
13)配置界面下,进入Industry Network,PROFINET
14)设置station名字,这个名字要和PLC端对机器人的station设置一样
15)添加signal,device选择profinetInternal device。
跟我学:西门子1200PLC与ABB机器人实现Profinet通讯,简单又实用

跟我学:西门⼦1200PLC与ABB机器⼈实现Profinet通讯,简单⼜实⽤西门⼦1200PLC作为Profinet控制器,ABB机器⼈作为Profinet的IO设备。
⼀、博途软件硬件组态1、博途软件中安装ABB机器⼈GSD⽂件。
GSD⽂件默认保存路径在C:\ProgramData\ABBIndustrial IT\Robotics IT\DistributionPackages\ABB.RobotWare-6.08.1040\RobotPackages\RobotWare_RPK_6.08.1040\utility\service\GSDML⽂件夹中。
依次点击“选项”、“管理通⽤站描述⽂件(GSD)(D)”,找到GSD⽂件夹,安装需要的GSD⽂件。
2、打开博途软件,创新新项⽬,添加1200PLC,设置PLC的IP地址等参数。
3、在“⽹络视图”下,添加ABB机器⼈硬件。
在硬件⽬录下找到ABB BASIC V1.4,双击添加到⽹络视图中。
4、分配连接的Profinet控制器,选择PLC_1。
5、设置Profinet IO设备的名称和IP地址。
6、根据实际通讯需要添加通讯数据的长度,这⾥添加输⼊和输出都是64个字节。
并设置输⼊输出的PLC地址。
7、保存硬件组态并下载到PLC中。
⼆、ABB机器⼈通讯配置1、设置ABB机器⼈Profinet IO设备的名称,与PLC硬件组态中设置⼀致。
2、设置ABB机器⼈通讯数据长度,与PLC硬件组态中数据长度⼀致。
3、设置ABB机器⼈Profinet通讯相关参数,IP地址和通讯接⼝。
IP地址需与PLC组态中的配置⼀致。
LAN3⼝即机器⼈控制柜上的X5⼝,设置完成后重新启动机器⼈系统。
4、添加通讯变量,这⾥测试功能需要,所以只添加两个组输⼊和两个组输出,长度为⼀个字节。
实际项⽬中,请根据需要添加变量。
输⼊变量名称、类型、总线、数据长度。
添加完成后重新启动机器⼈系统。
三、通讯测试1、ABB机器⼈控制柜上的⽹线连接X5,计算机IP地址修改为192.168.101.***⽹段。