AD转换非线性补偿实用算法
AD590温度传感器的非线性补偿及应用

参考文献(3条) 1.方佩敏 新编传感器原理 1994 2.张锡富 传感器 1993 3.王俊省 微计算机检测技术及应用 1996
相似文献(0条)
引证文献(24条) 1.裴勇生 基于935单片机的多点温度采集及显示系统的设计[期刊论文]-中国教育技术装备 2009(9) 2.路康.马斌强.刘美琪.袁超 温室大棚动态参数测试系统的设计[期刊论文]-河南农业大学学报 2008(03) 3.王刚 温度无线采集的系统设计[期刊论文]-科技信息(科学·教研) 2008(11) 4.劳振花 测量气体绝热指数的智能仪器研制[期刊论文]-科学技术与工程 2008(03) 5.丛红.仪垂杰.程道来 一种微型多路智能温湿度测控系统设计[期刊论文]-机床与液压 2008(02) 6.倪效勇.王典洪.张红剑 基于SOPC技术的传感器非线性软件校正的实现[期刊论文]-传感器与微系统 2008(01) 7.董学义 集成温度传感器AD590的应用[期刊论文]-黑龙江科技信息 2007(21) 8.周克宁.吴飞飞 一种电磁式电流互感器的数据实时修正法[期刊论文]-仪器仪表学报 2007(12) 9.雷少刚 基于AD590组成的温度测量电路及应用[期刊论文]-西安航空技术高等专科学校学报 2007(03) 10.孙世举 数字式多路温度巡检仪设计[期刊论文]-内江科技 2007(05) 11.胡明江.王忠.祁利巧.聂佳梅 优化电磁式角位移传感器线性度[期刊论文]-传感技术学报 2007(06) 12.尤文.张昕.韩波.关常军 超低功耗无线数字温度传感器的研制[期刊论文]-中国测试技术 2006(05) 13.于洪增.丁金华 温度监控虚拟仪器设计[期刊论文]-大连轻工业学院学报 2006(04) 14.余海钱.廖海洋.王涵 基于MEMS技术和无线射频网络的人体健康参数采集系统[期刊论文]-传感技术学报 2006(05) 15.刘燕 基于DSP的水分测定电子天平研究[学位论文]硕士 2006 16.王伯营 大规模集成电路界面热阻试验研究[学位论文]硕士 2006 17.党淑雯.郑耀林 计算机多点温度实用检测系统的设计[期刊论文]-华侨大学学报(自然科学版) 2005(01) 18.薛增涛 温室环境集成智能控制系统[学位论文]硕士 2005 19.卢言君 基于DSP的Internet远程控制器的开发与研究[学位论文]硕士 2005 20.党淑雯.郑耀林 集成温度传感器AD590及其在热电偶冷端补偿中的应用[期刊论文]-仪器仪表用户 2004(04) 21.王戴.吕强中.王同峰 温度传感器在数据采集系统中的应用[期刊论文]-计算机测量与控制 2004(01) 22.蔡兵 基于神经网络的AD590温度传感器非线性校正技术[期刊论文]-化工自动化及仪表 2004(04) 23.刘振全 集成温度传感器AD590及其应用[期刊论文]-电子质量 2004(12) 24.刘金权.黄锐.陆坤.奚大顺 基于无线数据传输的电力变压器监测系统[期刊论文]-传感器技术 2004(01)
ad转换的基本算法
ad转换的基本算法1. 什么是ad转换ad转换(Ad Conversion)是指将广告展示或点击行为转化为实际的业务指标,如注册、购买等,以衡量广告投放效果的一种算法。
ad转换算法在互联网广告领域中被广泛应用,可以帮助广告主评估广告效果、优化广告投放策略和提高投放效率。
2. ad转换算法的基本原理ad转换算法的基本原理是通过统计和分析广告展示和点击行为数据,将这些行为转化为具体的业务指标。
下面介绍几种常见的ad转换算法。
2.1 基于规则的算法基于规则的ad转换算法是一种简单但有效的方法。
它根据预先设定的规则,对广告展示和点击行为进行分类,并将其转化为相应的业务指标。
例如,可以设定一个规则,如果用户点击广告后产生了注册行为,则将该点击行为转化为注册指标。
2.2 基于回归分析的算法基于回归分析的ad转换算法是一种更为精确的方法。
它通过建立一个统计模型,将广告展示和点击行为与实际的业务指标之间的关系进行建模。
通过对模型进行拟合和验证,可以预测和估计广告投放对业务指标的影响程度。
这种算法可以帮助广告主更准确地评估广告效果和优化投放策略。
2.3 基于机器学习的算法基于机器学习的ad转换算法是一种较为复杂但有效的方法。
它利用机器学习算法对广告展示和点击行为数据进行训练和学习,从而自动发现其中的模式和规律,并将其应用于转化预测和优化决策中。
这种算法可以根据数据的特征和模式进行自适应调整,从而提高转化预测的准确性和效果。
3. ad转换算法的应用ad转换算法在互联网广告领域有着广泛的应用。
下面介绍一些常见的应用场景。
3.1 广告效果评估ad转换算法可以帮助广告主评估广告的效果和效益。
通过将广告点击和展示行为转化为实际的业务指标,广告主可以了解广告对业务的影响程度,并根据评估结果进行决策和优化。
3.2 广告投放优化ad转换算法可以帮助广告主优化广告投放策略。
通过分析广告展示和点击行为的特征和模式,算法可以发现哪些广告素材、渠道和时段对业务指标的影响最大,从而指导广告主进行广告投放的调整和优化,提高广告投放效率。
第十章 AD转换及其应用

内置ADC相关寄存器
ADMUX-ADC多路选择寄存器
内置ADC相关寄存器
ADCSRA-ADC 控制和状态寄存器A
ADEN: ADC 使能 ADSC: ADC 开始转换 ADATE: ADC 自动触发使能 ADIF: ADC 中断标志 ADIE: ADC 中断使能
内置ADC相关寄存器
内置ADC相关寄存器
ADMUX-ADC多路选择寄存器
内置ADC相关寄存器
ADMUX-ADC多路选择寄存器
ADLAR: ADC 转换结果 左对齐
内置ADC相关寄存器
ADMUX-ADC多路选择寄存器
内置ADC相关寄存器
ADMUX-ADC多路选择寄存器
内置ADC相关寄存器
ADMUX-ADC多路选择寄存器
主要组成: 信号处理装置、采样单元、采样保持器、数据 放大器、A/D转换器控制电路。
1、信号处理装置
组成:标度变换器、滤波电路、线性化处理及电参量间的转 换电路等。 ★ 标度变换器: 作用:把经由各种传感器所得到的不同种类和不同电平的被 测模拟信号变换成统一的标准信号。 ★ 滤波电路:
作用:滤掉或消除干扰信号,保留或增强有用信号。
ADCSRA-ADC 控制和状态寄存器A
内置ADC相关寄存器
ADCH/ADCL-ADC 数据寄存器 右对齐 ADLAR=0
左对齐 ADLAR=1
内置ADC相关寄存器
特殊功能IO 寄存器- SFIOR
ADTS2:0: ADC 自动触发源
ADC转换过程
选择参考电压源
通过设置ADMUX中的REFS[1:0]位
AD转换技术

几种A/D转换技术的介绍:(1)直接转换ADC直接转换ADC也称“闪电”式(Flash),这种结构的ADC速度极快,所有位的转换同时完成,但要求高密度集成数量巨大的比较器,如图4所示,一个N位分辨率的转换器需要2N-1个比较器。
参考电压由一个电阻网络设定,彼此相差VReF/2N,当输入电压NiN加上以后,所有比较器将 V1N与各自的参考电压值进行比较。
输出经一个编码逻辑单元编码后产生转换器的并行 N位数据输出,虽然直接转换 ADC 具有最快的速度,(目前可达几个GHz),但其分辨率受到集成度的限制,其过大的输入电容及大量的比较器产生的功率耗散,都将使该种转换器的应用受到影响。
(2)逐次逼近ADC逐次逼近ADC或称为位权转换技术,这种结构如图 5,采用一个比较器和一个N位数模转换器(DAC)和一个逐次逼近寄存控制器(SAR)等组成,当开始转换时,SAR将高位设置为 1, DAC将该值转换模拟量后由比较器与输入电压进行比较,当高于输入电压时则SAR 将第 1位设为 0,同时设置第二位为 1进行下一次比较,当 DAC电压低于输入电压时 SAR 将该位设为 1,同时设置下一位为 1,这样直到第 N位设置并判断完成后, SAR将此比较结果作为 ADC的输出。
这种转换技术具有功耗较低,很低的生产成本,但其输入带宽低,采样速率不高(最高达1MSPS)。
(3)积分型ADC积分型ADC又称双斜率转换技术,它包括两个主要部分,一部分电路采样并量化输入电压,产生一个时域间隔,另一部分产生脉冲序列,再由一个记数器将其转换成数字量。
如图6,图7,积分型 ADC的速度和带宽都非常低,但它们抑制高频噪声和固定的低频干扰的能力很强。
(4) ∑-ΔA DC∑-Δ转换器又称过采样转换器,这种转换器由∑-Δ调制器及数字滤波器和1位DAC构成,如图8,输入信号送入∑-ΔADC后被1位DAC进行高速量化,经过数字滤波处理后,得到转换记录。
ADC的积分非线性和微分非线性

2012-05-22 16:43ADC的积分非线性和微分非线性2011年05月10日星期二 10:41模数器件的精度指标是用积分非线性度(Interger NonLiner)即INL值来表示。
也有的器件手册用 Linearity error 来表示。
他表示了ADC器件在所有的数值点上对应的模拟值,和真实值之间误差最大的那一点的误差值。
也就是,输出数值偏离线性最大的距离。
单位是LSB(即最低位所表示的量)。
比如12位ADC:TLC2543,INL值为1LSB。
那么,如果基准4.095V,测某电压得的转换结果是1000,那么,真实电压值可能分布在0.999~1.001V之间。
对于DAC也是类似的。
比如DAC7512,INL值为8LSB,那么,如果基准4.095V,给定数字量1000,那么输出电压可能是0.992~1.008V之间。
下面再说DNL值。
理论上说,模数器件相邻量个数据之间,模拟量的差值都是一样的。
就相一把疏密均匀的尺子。
但实际并不如此。
一把分辨率1毫米的尺子,相邻两刻度之间也不可能都是1毫米整。
那么,ADC相邻两刻度之间最大的差异就叫差分非线性值(Differencial NonLiner)。
DNL值如果大于1,那么这个ADC甚至不能保证是单调的,输入电压增大,在某个点数值反而会减小。
这种现象在SAR(逐位比较)型ADC中很常见。
举个例子,某12位ADC,INL=8LSB,DNL=3LSB(性能比较差),基准4.095V,测A 电压读数1000,测B电压度数1200。
那么,可判断B点电压比A点高197~203mV。
而不是准确的200mV。
对于DAC也是一样的,某DAC的DNL值3LSB。
那么,如果数字量增加200,实际电压增加量可能在197~203mV之间。
总结:(1)INL(Interger NonLinear,Linearity error)精度。
理解为单值数据误差,对应该点模拟数据由于元器件及结构造成的不能精确测量产生的误差。
AD转换基本原理

AD转换基本原理AD转换(Analog-to-Digital Conversion)是指将连续的模拟信号转换为离散的数字信号的过程。
模拟信号是连续变化的,而数字信号是离散的,由一系列的0和1构成。
AD转换的基本原理包括采样、量化和编码三个过程。
首先是采样过程,即将连续的模拟信号在时间上进行离散化。
模拟信号是连续变化的,无限可分,而数字信号是离散的,由一系列取样点组成。
采样过程通过在一定的时间间隔内对模拟信号进行采样,获取一系列的采样点。
采样间隔需要满足奈奎斯特采样定理,即采样频率要大于被采样信号的最高频率的2倍,以避免采样失真。
接下来是量化过程,即将每个采样点的幅度转换为一组离散的量化值。
在量化过程中,根据量化位数,将模拟信号的幅度划分成若干等级,每个等级对应一个离散的量化值。
常用的量化方式有线性量化和非线性量化。
线性量化将量化等级均匀划分,而非线性量化可以根据信号的统计特性进行更精确的量化。
最后是编码过程,即将量化后的离散值转换为二进制数。
编码过程通过使用不同的编码方法,将量化值转换为对应的二进制数,以便存储和进一步处理。
常用的编码方法有自然二进制编码、格雷码编码和二进制编码等。
总结来说,AD转换的基本原理可以归纳为采样、量化和编码三个过程。
通过采样将连续的模拟信号离散化,然后通过量化将每个采样点的幅度转换为一组离散的量化值,最后通过编码将量化值转换为对应的二进制数。
AD转换在众多电子设备和通信系统中广泛应用,如传感器、音频设备、无线通信等,将模拟信号转换为数字信号,方便存储、处理和传输。
电子设计毕业设计-AD转换器-
A/D转换器3.9.【4血转换器的分类及简介常用的A'D转換养有积分型、逐次逼近型、井行比校妙申并"堂、W 调制型、电容所列逐次比较型及他频变換型.1.积分型{如TLC7135)积分塑A/I)工作原理是将输人电圧转换成时冏(脉冲宽度信号)或频和脉冲频和.然后山定时器/计数器获得数字值•优点是具有禹分辨車,缺点是由于转换将爱依赖匸积分河间,N此转换速率低。
2.逐次比较型(如TLC0831)逐次比较型A/D由一个比较器和D/A转换器通过逐次叱校逻辑构成•从MSB幵州.册序地对旬-位将输入电压与内置3 A转换器输出进行比较,经"次比较廁備出数孑值.优点足連度戦髙、功耗低•在低分辨率(<12位)时价格便宜•但高精度(>】2位)时价格很高,3并行比较型/串并行比较型(如TIXS510)并行比较型A/I)采用多个比较器•仅做一次比较而实行转换,又称Flash(快谨)型,由于转换速率极高•"位的转换需要加-1个比较器.因此电路规模也扱大,价格也髙,适用于视频A/D$$换器等速度待別高的领域。
串幷行比较型A/D转换器结构上介于并行型和逐次比较型之间.最典型的定由2个"2 位的片•行型A/D转换器配合D/A转换器组成,用两次比校实行转换•所以称为H訪flash(半快速〉型。
还有分成三步或多步实现A/D转凑的叫做分级(Multistep/Subranglingl型A/D. 而从转换时序角度又可称为流水线(Pipelined)型A/D,现代的分级禮儿⑴转换器中还加入f 对多次转换结果做数字运算而修正持件等功能。
这类A/D速度比逐次比较型离•电路规模比并行宅小.4.04调制型(如AD7705)I-A型A/D由积分務、比较器、1位D/A转换器和数字濾波器等组成,原理上近似于积分壇•将输入电压转换成时间(脉冲宽度)信号,用数字滤波器处理后得到数字值。
因此具有高分辨率•主妥用于音频和测It5.电審阵列巡次比较型电容阵列逐次比较型A/D在内置D/A转换器中采用电容矩阵方式•也町称为电荷再分配型°傲的电阻阵列DA转换器中多数电阻的值必级一致•在車芯片卜牛•成高精度的电亂)1•不容易。
APD非线性响应补偿--应用笔记4463

应用笔记4463APD非线性响应补偿Hrishikesh ShindeJan 10, 2010摘要:激光模块需对雪崩光电二极管(APD)的非线性响应进行补偿。
本应用笔记以DS1875 SFP 控制器为例,探讨如何使用Maxim的光控制器完成非线性补偿。
APD特性光模块采用基于雪崩光电二极管(APD)的光接收器支持高灵敏度设计。
从APD接收到的反馈呈非线性(平均接收功率),这一非线性特性为优化控制激光器模块带来一定困难,典型的APD非线性特性如图1所示。
图1. 典型的APD响应显示了非线性特性为了保证精准操作,需要对APD的非线性进行补偿。
补偿后可以为SFP控制器模块提供线性反馈,提高系统稳定性。
补偿后的APD响应如图2所示。
图2. 该平均曲线显示了所期望的典型响应,生产过程中对响应中微小变化的补偿是不可行的。
使用RSSI修正非线性Maxim的光控制器,如DS1875,能够补偿APD的非线性。
DS1875的一个输入通道(MON3)有两个工作区(细调和粗调)配置,每个区域都有其独立的量程和偏置,用于校准接收到的功率信号的非线性。
校准通过对APD二极管的非线性响应进行分段线性近似,拟合完成。
除了提供两个独立的工作区,DS1875也可在细调区域对ADC转换结果进行右移操作。
即使输入信号不能完全覆盖输入范围,通过右移操作也可提高转换精度。
滞回的重要性在给定的交叉点,DS1875根据输入信号的幅度自动地在两个工作区之间切换。
在交叉点提供滞回,当从粗调切换到细调时,切换点会发生变动。
这能保证器件不会在两个工作区间来回触发,造成不稳定。
交叉点会根据针对细调范围的右移位设定的不同而改变,表1列出了不同的右移设置下交叉点的改变。
需要注意的是,DEC栏到滞回(hysteresis)栏对应的变化值。
表1. 右移时的交叉点设置校准DS1875DS1875输入端MON3的两个工作区必须进行校准,这样才能准确拟合所要求的APD响应。
AD转换电路

1当启动信号(即“START”信号,图中未示出)的正边沿到达后,电路被初始化为
以下状态:寄存器TR3〜TR0清零为d3d2d1d0=0000,从而DAC的模拟输出vo=0V;FF1〜FF6组成的环形计数器的状态为Q1Q2Q3Q4Q5Q6=100000,门H3〜H0被Q6=0封锁,数字 输出D3D2D1D0=0000。
2START信号过后,即其下降边到达时,信号vc=1,A/D转换开始。第1个CP脉冲
到达时,如果输入的取样保持信号vi工0V,则vi>vo=0V,vb=0,与门G3〜G0被封锁,TR3的R=0、S=Q1=1,而TR2〜TR0的S=0、R=1(注意,Q1=1经或门M2〜M0使TR2〜TR0的R=1),所以TR3〜TR0被置为d3d2d1d0=1000,此数码经D/A转换变为满量程电压的一 半左右(这相当于上述加100公斤的秤砣!);与此同时,环形移位寄存器状态下移1位变
G1、G2输出低电平,开关So闭合使电容C完全放电,Si掷下方,比较器输出vb=0,门G3关闭。
(2)vc=1时,开关So断开,开关Si掷上方接输入信号Vi,积分器开始对Vi积分,输 出电压为
1
vOV|dt-t(1222-1)
RC
显然vo是1条负向积分直线,如图12.2.2-1(b)中t=0〜T1段实线所示。与此同时,比较器
4类似地,第3个CP脉冲到达后,d1dO=1O,Q1Q2Q3Q4Q5Q6=OOO1OO;第4个CP脉 冲到达后,dO=1,Q1Q2Q3Q4Q5Q6ROOO1O。
5第5个CP脉冲用于输出数字码:第5个CP脉冲到达后,]Q1Q2Q3Q4Q5Q6=OOOOO1,
AD转换法分析

A/D转换器AD转换就是模数转换,就是把模拟信号转换成数字信号。
模拟量可以是各种物理量,但在A/D转换前,输入到A/D转换器的输入信号必须转换成电压信号。
输出是数字信号。
输出数字信号的位数越多,分辨率越高,精度也越高,转换器的性能也就越好。
A/D转换主要有三种方法:逐次逼近法,双积分法,电压频率转换法。
A/D转换一般要经过采样、保持、量化及编码4个过程。
在实际电路中,有些过程是合并进行的,如采样和保持,量化和编码在转换过程中是同时实现的。
转换方法模数转换过程包括量化和编码。
量化是将模拟信号量程分成许多离散量级,并确定输入信号所属的量级。
编码是对每一量级分配唯一的数字码,并确定与输入信号相对应的代码。
模数转换从转换原理来分可分为直接法(逐次逼近法)和间接法(双积分法,电压频率转换法)两大类。
直接法是直接将电压转换成数字量。
它用数模网络输出的一套基准电压,从高位起逐位与被测电压反复比较,直到二者达到或接近平衡。
1.逐次逼近法图1 逐次逼近法原理图先使二进位制数的最高位Dn-1=1,经数模转换后得到一个整个量程一半的模拟电压VS,与输入电压Vin相比较,若Vin>VS,则保留这一位;若Vin<Vs,则Dn-1=0。
然后使下一位Dn-2=1,与上一次的结果一起经数模转换后与Vin相比较,重复这一过程,直到使D0=1,再与Vin相比较,由Vin>VS还是Vin<V来决定是否保留这一位。
经过n 次比较后,n位寄存器的状态即为转换后的数据。
特点:直接逐位比较型转换器是一种高速的数模转换电路,转换精度很高,但对干扰的抑制能力较差,常用提高数据放大器性能的方法来弥补。
间接法不将电压直接转换成数字,而是首先转换成某一中间量,再由中间量转换成数字。
2.双积分法图2 双积分法原理图双积分法A/D转换的过程是:先将开关接通待转换的模拟量Vi,Vi采样输入到积分器,积分器从零开始进行固定时间T的正向积分,时间T到后,开关再接通与Vi极性相反的基准电压VREF,将VREF输入到积分器,进行反向积分,直到输出为0V时停止积分。
《AD转换及其原理》

二.ADC的主要技术参数
1. 分辨率
• 对于ADC来说,分辨率表示输出数字量变化一个相邻数码 所需要输入模拟电压的变化量。通常定义为满刻度电压与 2n的比值,其中n为ADC的位数。例如具有12位分辨率的 ADC能够分辨出满刻度的1/212(0.0244%)。
• 有时分辨率也用A/D转换器的位数来表示,如ADC0809的分 辨率为8位,AD574的分辨率为12位等。
接着不断用上压述方力法,、由大温到小度砝码、逐一位添加移比较和,凡速砝码度总重等量小,于物它体重们量的都砝码是保留连,否续则拿变下所化添加的的砝物码。理量。
ALE:地址锁存允许信号。
计算机能够处 这理的些是数连字量续信息变。化的物理量称为模拟量。
这样可得保留的砝码为128g+64g+2g+1g=195g,与重物重量相等,相当于转换的数码为D7~D0=11000011。 ALE:地址锁存允许信号。 一个n位二进制数只能表示2n个量化电平,量化过程中不可避免会产生误差,这种误差称为量化误差。
“[ ]”表示取整。 A/D转换的一般步骤和基本原理
D0 D = Dn-1 Dn-2 D1 D0
这些连续变化的物理量称为模拟量。
(由于集成运放A具有很高的输入阻抗,在保持阶段,电容C上所存电荷不易泄放。
D
uI
“[ ]”表示取整。
基本原理
△ 称为 ADC 的单位量化电压或量化单位,它 是 ADC 的最小分辨电压。
ADC0809
ADC0809的引脚功能
• IN0~IN7:8路模拟输入。 • START:启动A/D转换信号。 • ALE:地址锁存允许信号。 • EOC:转换结束信号。 • ADDA、ADDB、ADDC:8路模拟通道选择。
• V)RE=F+(5+V,)V、REVFR(EF-()-=)0V:。基准电压输入,典型值为VREF(+
ad信号幅度补偿逻辑_理论说明以及概述

ad信号幅度补偿逻辑理论说明以及概述1. 引言1.1 概述本文旨在介绍AD信号幅度补偿逻辑的理论说明以及概述。
AD信号幅度补偿逻辑是一种用于提高模拟-数字转换器(ADC)性能的技术。
通过在信号采集前对输入信号进行幅度补偿,该技术可以有效地消除由于ADC非线性导致的动态范围损失和失真问题。
1.2 文章结构本文主要分为四个部分:引言、AD信号幅度补偿逻辑理论说明、AD信号幅度补偿逻辑概述以及结论。
以下将对每个部分的内容进行详细描述。
1.3 目的本文旨在介绍AD信号幅度补偿逻辑的原理、算法、应用场景以及优势,并展示其在实际应用中的表现和性能评估结果。
同时,文章将总结主要观点和研究成果,并探讨未来发展方向和可能的应用领域,以期为相关研究和工程领域提供有益参考。
以上是“1. 引言”部分内容的详细描述,请依据此内容进行撰写。
2. AD信号幅度补偿逻辑理论说明:2.1 AD信号幅度补偿原理AD信号幅度补偿是一种用于恢复被失真的模拟信号幅度的技术。
在数模转换器(ADC)应用中,由于电路非线性、温度等因素的影响,输入信号可能会被压缩或展宽,导致采样结果产生误差。
为了减小这种误差并提高系统性能,需要对AD信号进行幅度补偿。
AD信号幅度补偿的原理基于估计和校正两个步骤。
首先,通过采集样本数据来估计AD转换器当前的失真程度。
这些样本数据可以通过测试仪器或自校验电路获取。
然后,在获取到失真程度信息后,利用校正算法对ADC输出数据进行修正,使其重新回复到与输入信号成比例的幅度。
2.2 AD信号幅度补偿算法常见的AD信号幅度补偿算法包括两点线性插值、多项式插值和曲线拟合等方法。
- 两点线性插值方法:该方法通过选取两个已知输入输出对,并根据线性插值公式来估计其他未知输入输出对的幅度补偿值。
这种方法简单快速,但对于复杂的非线性失真情况效果不佳。
- 多项式插值方法:该方法通过使用多项式函数来建模非线性失真,并利用已知输入输出对拟合出一个适当的多项式曲线。
多路开关采样AD转换误差计算

多路开关采样AD转换误差计算多路开关采样是一种常用的模拟到数字(AD)转换技术,用于将模拟信号转换为数字信号。
在实际应用中,由于各种因素的影响,多路开关采样AD转换存在一定的误差。
本文将重点介绍多路开关采样AD转换误差的计算方法。
1.非线性误差2.噪声误差3.采样保持误差4.温度误差5.偏置电流误差首先,我们来看一下非线性误差。
非线性误差是指AD转换器输出与输入之间的误差,通常以百分比的形式表示。
非线性误差可通过数据手册中的非线性误差曲线来确定。
一般来说,非线性误差会随着输入信号的变化而变化,因此在进行误差计算时需要考虑输入信号的范围。
其次,噪声误差是由于电路中各种噪声源引起的。
噪声误差可通过测量转换器的信噪比(SNR)来确定。
通常情况下,SNR越高,转换的精度就越高。
采样保持误差是指在采样保持阶段,输入信号的变化引起的误差。
采样保持误差主要来自于采样保持电路中的开关和电容。
通常情况下,通过在设计中选择合适的开关和电容,可以减小采样保持误差。
温度误差是由于温度变化引起的。
温度会影响转换器电路中的电阻、电容和其他元件的性能,从而导致转换误差。
温度误差通常可以通过在数据手册中查找温度特性曲线来确定。
最后,偏置电流误差是由于转换器输入端偏置电流引起的。
偏置电流误差通常以电流的形式表示,并可以通过在数据手册中查找偏置电流特性曲线来确定。
综上所述,多路开关采样AD转换误差的计算方法包括查阅数据手册获取相关特性曲线,根据输入信号范围确定非线性误差,测量并计算信噪比确定噪声误差,选择合适的开关和电容减小采样保持误差,查找温度特性曲线确定温度误差,查找偏置电流特性曲线确定偏置电流误差。
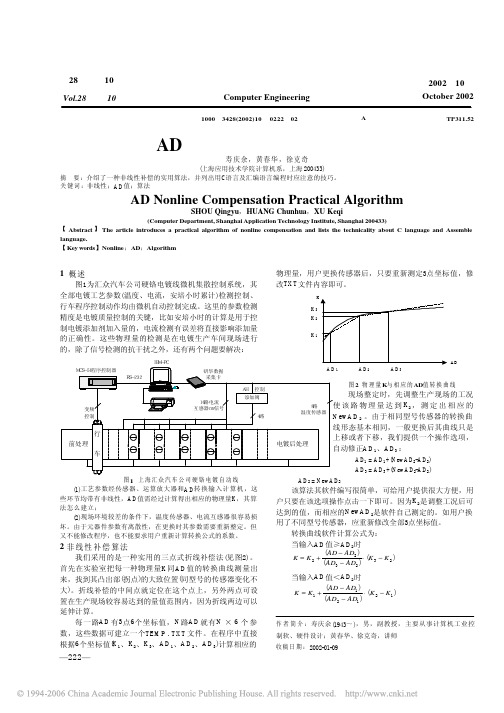
铂电阻的AD非线性校正

因为 B 常数为负值 , 上式可写成 R t - R 0 = R 0 × A × t ×( 1 收稿日期 : 2002 - 09 - 10
作者简介 : 李纲民 (1965 - ) ,男 , 山东烟台人 , 高级工程师 , 研究方向为智能仪表的研制与开发 .
K5 × V in . 其中 : N 为 A/ D 转换输出的数字量 ; V in 为 A/ D 的模拟输入电压 ; V R 为基准电 VR
压 ; K5 为变换系数 .
第 1 期 李纲民 , 等 :铂电阻的 A / D 非线性校正 表 1 数据与误差分析表 理论温度 / ℃ Pt 100 电阻值 / Ω 校正后的温度 / ℃
由式 ( 1) 可得 , V in = V 0 = K1 ×( R t R 0 ) , 由式 ( 4) 可以看出 , 只要选用输入可浮 动比例式 A/ D 转换器 , 将一定量的输入 V in 反馈到基准电压 V R , 即可实现补偿 . 具体电 路见图 2 . 由图 2 可得 A/ D 转换器的输出 N 为
铂电阻的 A/ D 非线性校正
李纲民1 ,杨文波2
( 1. 烟台大学 计算机科学与技术学院 ,山东 烟台 264005 ; 2. 烟台市 广播电视局 ,山东 烟
台 264001) 摘要 : 提出了四线制铂电阻在测量过程中通过硬件设计进行电阻温度之间非线性校正的 一种方法 ,给出了相应的校正电路和实验数据 . 该方法具有电路简单 ,使用方便 ,测量精度 较高等特点 . 也可将其应用到其他具有类似关系的传感器的非线性校正中 . 关键词 : 铂电阻 ; A/ D 转换 ; 非线性校正 中图分类号 : O471 文献标识码 : A
AD转换非线性补偿实用算法
时要编小数除法的程序(DIV 指令是整数除法)。这样要比用
浮点子程序库简单得多。其次,由于汇编程序对多字节带符
号数不太好处理。当AD <AD1时应使用下式来计算物理量 K。
K
=
K1
−
( AD1 ( AD2
− −
AD) AD1 )
⋅
(K2
−
K1)
另外,单片机系统要使用E2PROM来存放用户设定修改
的3个坐标点。
language. 【 Key words】 Nonline; AD; Algorithm
1 概述
图1为汇众汽车公司硬铬电镀线微机集散控制系统,其 全部电镀工艺参数(温度、电流,安培小时累计)检测控制、 行车程序控制动作均由微机自动控制完成。这里的参数检测 精度是电镀质量控制的关键,比如安培小时的计算是用于控 制电镀添加剂加入量的,电流检测有误差将直接影响添加量 的正确性。这些物理量的检测是在电镀生产车间现场进行 的,除了信号检测的抗干扰之外,还有两个问题要解决:
SHORT INT ISP,I,J
STATIC NNSIGNED T [N],TKAD [N] [6],TAD [N]
······
IF (FP = OPEN(“TEMP . TXT ”,O_RDONLY) = = -1) {PRINTF ( “CANNOT OPEN TEMP . TXT .\N”) EXIT (1);
3 结束语
随着加工技术的不断进步、加工工艺的不断完善和加工 设备的不断改进,计算机的机箱设计越来越复杂,品种也越 来越多,在进行密封设计时,应针对不同种类的机箱选用相 应的密封结构,或者在同一种机箱上根据不同的结构特点选 用多种密封结构,力争做到既简单、经济又可靠、实用。随 着产品批量的增长,为了降低成本,特别是小型、袖珍式的 加固计算机机箱的加工制造,将会更多地采用铝合金压铸或 失蜡浇铸的方式,它具有成本低、易加工成型等特点,而且 可以得到形状很复杂的箱体。但是,由于是热加工的方式, 其收缩比难以控制,密封槽的尺寸一致性差,这就给密封设 计带来一定的困难,因此设计人员应加强对铸造机箱的密封 设计研究,以提高其密封的能力。
第2章 多路开关采样AD转换误差计算解读

3.3 多路开关集成芯片 CD4501真值表
INH C
B
A
接通通道
0
0
0
0
S0
0
0
0
1
S1
0
0
1
0
S2
0
0
1
1
S3
0
1
0
0
S4
0
1
0
1
S5
0
1
1
0
S6
0
1
1
1
S7
1 ×××
无
其中VEE是负电源端,用于电平移位。当 VSS=0V时,使得在单组电源供电条件下工作的 CMOS电路所提供的数字信号能直接控制开关,切 换幅度在VEE到VDD之间的模拟信号,最大峰—峰 值达15V。典型电平移位连接方法如图2.27所示
多路开关集成芯片 表3.1 AD7501真值表
A2
A1
A0
EN
导通
0
0
0
1
1
0
0
1
1
2
0
1
0
1
3
0
1
1
1
4
1
0
0
1
5
1
0
1
1
6
1
1
0
1
7
1
1
1
1
8
×
×
×
0
无
多路开关集成芯片
AD7503 除EN 端的控制逻辑电平相 反外, 其它与AD7501相同。
⑵ AD7502
EN A1 A0
UDD
(+1 5 V)
基于未建模动态补偿的非线性自适应切换控制方法

第37卷第7期自动化学报Vol.37,No.7 2011年7月ACTA AUTOMATICA SINICA July,2011基于未建模动态补偿的非线性自适应切换控制方法柴天佑1,2张亚军1摘要针对一类不确定的离散时间零动态不稳定的单输入-单输出(Single-input single-output,SISO)非线性系统,提出了一种基于未建模动态补偿的非线性控制器.采用自适应神经模糊推理系统(Adaptive-network-based fuzzy inference system, ANFIS)和一一映射相结合的方法估计未建模动态.在此基础上,提出了由线性自适应控制器、非线性自适应控制器以及切换机制组成的自适应切换控制方法.该方法通过对上述两种控制器的切换,保证闭环系统输入输出信号有界的同时,改善系统性能.本文将要求未建模动态全局有界的条件放宽为线性增长,建立了所提自适应控制方法的稳定性和收敛性分析.通过仿真比较和水箱的液位控制实验,验证了所提方法的有效性.关键词非线性系统,不稳定零动态,未建模动态补偿,自适应切换控制DOI10.3724/SP.J.1004.2011.00773Nonlinear Adaptive Switching Control Method Based on UnmodeledDynamics CompensationCHAI Tian-You1,2ZHANG Ya-Jun1Abstract This paper presents a nonlinear controller based on unmodeled dynamics compensation for a class of uncer-tain and discrete-time single-input single-output(SISO)nonlinear systems with unstable zero-dynamics.By combining an adaptive-network-based fuzzy inference system(ANFIS)with“one-to-one mapping”,a compensator for unmodeled dynamics is constructed.With the above development,an adaptive switching control method is proposed that consists of a linear adaptive controller,a nonlinear adaptive controller and a switching mechanism.By using switching between the above two controllers,it has been shown that both an improved performance and stability can be achieved simultane-ously.The paper assumes the unmodeled dynamics of the systems to satisfy a linear growth condition,which relaxes the widely used global boundedness condition on the unmodeled dynamics.The analysis on stability and convergence of the adaptive control method are established.Finally,through the simulation based comparative study and the experiment of the proposed control on a tank level adaptive control system,the effectiveness of the proposed method is justified.Key words Nonlinear system,unstable zero dynamics,unmodeled dynamics compensation,adaptive switching control不确定非线性系统的自适应控制问题一直是自适应控制领域具有挑战性的难题.文献[1]针对一类零动态渐近稳定的非线性系统,将多模型与神经网络相结合,提出了一种非线性自适应控制方法.文献[2−4]针对零动态不稳定的非线性系统,分别提出了基于广义最小方差策略的自适应控制方法和广义预测自适应控制方法.但上述方法都把这类非线性收稿日期2010-10-15录用日期2011-01-22Manuscript received October15,2010;accepted January22, 2011国家重点基础研究发展计划(973计划)(2002CB312201),国家自然科学基金(60534010,61004091),国家创新研究群体科学基金(60521003),高等学校学科创新引智计划项目(B08015),国家科技支撑计划(2008BAB31B03)资助Supported by National Basic Research Program of China (973Program)(2002CB312201),National Natural Science Founderation of China(60534010,61004091),Funds for Cre-ative Research Groups of China(60521003),the111Project (B08015),and National Science and Technology Support Project (2008BAB31B03)1.流程工业综合自动化国家重点实验室(东北大学)沈阳1100042.东北大学自动化研究中心沈阳1100041.State Key Laboratory of Synthetical Automation for Pro-cess Industries(Northeastern University),Shenyang1100042.Research Center of Automation,Northeastern University, Shenyang110004系统表示成一个线性系统和高阶非线性项即未建模动态,并假定未建模动态全局有界,而且界已知.文献[5]利用k阶差分算子,在不需要未建模动态全局有界,但未建模动态的变化率须全局有界并且界已知的情况下,提出了基于神经网络与多模型的非线性多变量自适应控制方法.文献[6]针对一类具有结构不确定性的未建模动态的非线性系统,假定在未建模动态有界但其界未知的条件下,利用模糊逻辑系统来逼近该未建模动态,提出了鲁棒自适应控制方法.如何进一步放宽未建模动态全局有界的条件,研究一般意义下的不确定非线性系统的自适应控制问题是一个具有挑战性的研究课题.在文献[1−3]中都使用神经网络来逼近系统的未建模动态,但神经网络收敛速度慢并且容易陷入局部极小点,而且网络结构的确定仍需凭借经验和凑试法[7],所以影响未建模动态的估计,从而影响控制效果.另外,神经网络的万能逼近特性要求网络的输入(状态,系统的输入或输出)有界,而在自适应控制中,在设计控制器之前是不能保证其状态或输入输出信号是有界的.因此,针对未建模动态全局有界的局限性,本文要求系统的未建模动态是线性增774自动化学报37卷长的,并采用自适应神经模糊推理系统(Adaptive-network-based fuzzy inference system,ANFIS)[8]与文献[9]提出的连续、单调并可逆的一一映射相结合的方式来估计未建模动态,提出了基于未建模动态补偿的一类单输入-单输出(Single-input single-output,SISO)零动态不稳定非线性系统的自适应切换控制方法.1控制问题描述一般而言,SISO离散时间非线性动态系统可用状态方程表示:Σ:x(k+1)=F[x(k),u(k)]y(k)=H[x(k)](1)其中,u(k)∈R和y(k)∈R分别为系统在k时刻的输入和输出;x(k)∈R n是系统的状态,F[x(k),u(k)]∈R n和H[x(k)]∈R为连续可微的未知非线性函数,原点为系统的平衡点,即F(0,0)=0,H(0)=0.当在原点的某一邻域研究非线性系统(1)时,通常采用下面的式(2)作为其等价系统[1,10].Σ:x(k+1)=C x(k)+D u(k)+F1[x(k),u(k)]y(k)=E x(k)+H1[x(k)](2)其中C=∂F F∂x x|x=0,u=0∈R n×nD=∂F F∂u|x=0,u=0∈R n×1E=∂H∂x x|x=0∈R1×n并称三元组(C,D,E)代表Σ的线性化系统,记作ΣL,并且假定系统ΣL既能控又能观[1].F1[·]∈R n,H1[·]∈R是包含x(k)和u(k)高阶项的函数,定义为高阶函数.由于系统输入输出可观测,系统的状态x(k+1)可以表示为y(k),···,y(k−n+ 1),u(k),···,u(k−n+1)的函数.所以,在原点的邻域里,式(2)可以局部地表示为y(k+d)=a0y(k)+···+a n−1y(k−n+1)+b0u(k)+···+b n−1u(k−n+1)+v[y(k),···, y(k−n+1),u(k),···,u(k−n+1)](3)其中,d为系统的时滞,d≥1;n为系统的阶次; v[·]是系统的未建模动态(高阶非线性函数);当时滞d=1时,利用单位延迟算子z−1,式(3)可写为A(z−1)y(k+1)=B(z−1)u(k)+v[X(k)](4)其中,A(z−1)和B(z−1)是关于z−1的多项式,阶次分别为n,n−1;A(z−1),B(z−1)和X(k)分别为A(z−1)=1−a0z−1−···−a n−1z−nB(z−1)=b0+b1z−1+···+b n−1z−n+1X(k)=[y(k),···,y(k−n+1),u(k),···,u(k−n+1)]T 本文要求非线性部分v[·]=v[X(k)]满足如下假设[11−12]:条件1.|v[·]|≤γ(k),∀k,其中,γ(k)是v[·]的上界函数,定义为γ(k)=ε1 X(k) +ε2(5) 0≤ε1<1,ε2>0均为已知常数.注 1.上述高阶非线性部分的上界是一个与系统过去的输入u(k),···,u(k−n+1)和输出y(k),···,y(k−n+1)都有关的函数,放宽了文献[1−6]中要求高阶非线性项或其变化率全局有界的限制.PH中和过程就是满足上述条件的非线性系统.控制目标为设计自适应控制系统,保证闭环系统的输入输出信号有界即闭环系统(Bounded-input-bounded-output,BIBO)稳定,同时使得系统输出渐近跟踪预先给定的有界参考信号的变化.2基于未建模动态补偿的非线性控制器针对非线性被控对象(4),提出如图1所示的含有反馈控制器和未建模动态补偿器组成的非线性控制器.其中,反馈控制器由关于z−1的多项式R(z−1),H(z−1)和G(z−1)组成,用来控制系统的输出y(k),使其跟踪有界参考输入信号w(k).未建模动态补偿器K(z−1)用来消除未建模动态v[·]对控制输出的影响.图1基于未建模动态补偿的非线性控制器Fig.1Nonlinear controller based on compensation ofthe unmodeled dynamics7期柴天佑等:基于未建模动态补偿的非线性自适应切换控制方法775由图1可知,u(k)可以表示为u(k)=H−1(z−1){R(z−1)w(k)−G(z−1)y(k)−K(z−1)v[·]}(6)将控制器方程(6)代入被控对象(4)可得闭环系统方程:[H(z−1)A(z−1)+z−1B(z−1)G(z−1)]y(k+1)= R(z−1)B(z−1)w(k)+[H(z−1)−B(z−1)K(z−1)]v[·](7)从式(7)可以看出,通过选择R(z−1)、H(z−1)、G (z−1)和K(z−1)可以实现输出y(k)对参考输入w(k)的跟踪,并尽可能地消除非线性项对系统输出的影响.为选择控制器参数R(z−1)H(z−1)、G(z−1)和K(z−1),引入如下的性能指标[13]J=[P(z−1)y(k+1)−R(z−1)w(k+1)+Q(z−1)u(k)+K(z−1)v[·]]2(8)其中,w(k)∈R是已知有界的参考输入信号. P(z−1)、Q(z−1)、R(z−1)和K(z−1)均为关于z−1的加权多项式.使性能指标式(8)最小的最优非线性控制器为[F B(z−1)+Q(z−1)]u(k)=R(z−1)w(k+1)−G(z−1)y(k)−[K(z−1)+F]v[·](9)其中,G(z−1)=g0+g1z−1+···+g n−1z−n+1为关于z−1的n−1阶多项式,F为常数,它们由下面的Diophantine方程所唯一确定:P(z−1)=F A(z−1)+z−1G(z−1)(10)由式(10),易得F=P(0).由式(6)和式(9)可知,与图1中所对应的控制器参数为H(z−1)=F B(z−1)+Q(z−1)K(z−1)=K(z−1)+F当v[·]的影响可以忽略时,线性控制器方程为[F B(z−1)+Q(z−1)]u(k)=R(z−1)w(k+1)−G(z−1)y(k)(11)下面给出一种简单的加权项选择方法.P(z−1)=R(z−1)=1(12)Q(z−1)=λ1(1−z−1)(13)K(z−1)=λ2(1−z−1)(14)λ1,λ2采用离线凑试法选择.按照式(12)∼(14)来选择加权多项式,此时对应的H(z−1)和K(z−1)分别为H(z−1)=B(z−1)+λ1(1−z−1)(15) K(z−1)=1+λ2(1−z−1)(16)于是,控制器方程(9)和(11)变为[B(z−1)+λ1(1−z−1)]u(k)=w(k+1)−G(z−1)y(k)−[1+λ2(1−z−1)]v[·](17)[B(z−1)+λ1(1−z−1)]u(k)=w(k+1)−G(z−1)y(k)(18) 3自适应切换控制方法3.1自适应控制策略当系统的A(z−1),B(z−1)以及未建模动态v[X(k)]未知时,可采用如图2所示的由线性自适应控制器、非线性自适应控制器和切换机制组成的自适应控制方法.图2自适应切换控制结构Fig.2The structure of the adaptive switching control 线性自适应控制器用来保证闭环系统的输入输出信号有界;基于未建模动态补偿的非线性自适应控制器用来改善系统的性能.切换机制通过上述两种自适应控制器的切换,保证闭环自适应系统输入输出有界的同时改善系统的性能.3.2自适应控制算法由式(4)、式(10)和式(12)可得线性控制器参数估计方程为y(k+1)=G(z−1)y(k)+H(z−1)u(k)+v[·]=θT X(k)+v[·](19)776自动化学报37卷其中,H(z−1)=F B(z−1),X(k)为输入输出组成的数据向量,θT=[g0,g1,···,g n−1,h0,h1,···,h n−1].由式(9),式(17)和式(19)可得非线性控制器方程为θT X(k)=w(k+1)−λ1(1−z−1)u(k)−[1+λ2(1−z−1)]v[X(k)](20)由式(11),式(18)和式(19)可得线性控制器方程为θT X(k)=w(k+1)−λ1(1−z−1)u(k)(21)3.2.1线性自适应控制器首先采用线性控制器参数辨识方程(19)估计线性控制器参数θ,其估计值ˆθ1(k)T为ˆθ1(k)T=[ˆg1,0(k),···,ˆg1,n−1(k),ˆh1,0(k),···,ˆh1,n−1(k)](22)辨识算法[1]为ˆθ1(k)=proj{ˆθ1(k)}=θ1(k),ˆh1,0(k)≥b min[···,b min,···]T,其他(23)ˆθ 1(k)=ˆθ1(k−1)+µ1(k)X(k−1)e1(k)1+(k−1)T(k−1)(24)µ1(k)=1,|e1(k)|>2γ(k−1)0,其他(25)其中,γ(k−1)由式(5)计算.e1(k)=y(k)−ˆθ1(k−1)T X(k−1)=v[X(k−1)](26)其次,由式(21)和确定等价原则可知,基于线性估计模型的自适应控制器为ˆθ1(k)T X(k)=w(k+1)−λ1(1−z−1)u(k)(27) 3.2.2非线性自适应控制器采用基于ANFIS的估计算法估计未建模动态v[X(k)],其估计值为ˆv[X(k)].由辨识方程(19)可得非线性控制器参数辨识方程为y(k+1)−ˆv[·]=θT2X(k)+π[·](28)其中,π[·]=v[·]−ˆv[·],ˆv[·]由下列方法估计.由于v[X(k)]可能无界,故引入ς[X(k)].|ς[X(k)]|=|v[X(k)]|ε1 X(k) +ε2(29)很明显,|ς[X(k)]|≤1.为保证ANFIS的输入向量X(k)在紧集中,本文采用文献[9]中提到的连续单调并可逆的一一映射α:˜Xi(k)=α[X i(k)]=11+exp[−X i(k)](30)i=1,2, (2)α把X i(k)的定义域Ωi=(−∞,+∞)映射到˜Ωi= (0,1),˜Ωi可以被紧集Ωi=[0,1]所覆盖,从而保证了ANFIS的万能逼近特性成立的前提条件.所以,新的数据向量˜X(k)将作为ANFIS的输入训练数据并得到ς[˜X(k)].ˆv[X(k)]可按下式计算:ˆv[X(k)]=ˆς[˜X(k)][ε1 α−1[˜X(k)] +ε2](31)其中α−1[˜X(k)]=[α−1(˜X1(k)),···,α−1(˜X2n(k))]在时刻k,采用ANFIS在线逼近ς[X(k)]的结构如图3所示.图3ANFIS估计v[X(k)]的结构Fig.3The architecture of ANFIS estimating v[X(k)]图3中,系统的输入量和输出量首先经过映射α转化为˜u(k),···,˜u(k−n+1),˜y(k),···,˜y(k−n+1),并以此作为ANFIS的输入,ANFIS按照模糊推理技术来建立ς[˜X(k)]的模糊模型,从而对ς[˜X(k)]进行估计,并利用神经网络的学习能力对误差|ς−ˆς|进行反复纠正学习,采用BP算法与最小二乘算法相结合的混合校正算法来调整模糊基函数中隶属度的中心值和宽度以及模糊规则结论部分的连接权,最终使估计误差达到最小.本文采用T-S型[14]ANFIS来估计ς[X(k)],其中,T-S型模糊系统可由n条模糊If-then规则组成的集合来表示.假定系统有m个输入x1,x2,···,7期柴天佑等:基于未建模动态补偿的非线性自适应切换控制方法777 x m,单输出f,则第i条模糊规则的形式如下[15−16]:If x1is A i1,x2is A i2,···,x m is A imthen f i=p i0+p i1x1+p i2x2+···+p imx m其中,A im 是输入量x m的模糊子集,p im为连接权重,i=1,···,n.图3中的ANFIS是具有5层结构的前向网络,其内部各层的具体功能以及参数调节算法在文献[8]中有详细阐述,这里不再赘述.ˆθ2(k)为k时刻参数θ的基于辨识方程(28)的估计值,其辨识算法类似于ˆθ1(k),即ˆθ2(k)=proj{ˆθ2(k)}=θ2(k),ˆh2,0(k)≥b min[···,b min,···]T,其他(32)ˆθ 2(k)=ˆθ2(k−1)+a(k)X(k−1)e2(k)1+X(k−1)T X(k−1)(33)a(k)=1,|e2(k)|>2ξ0,其他(34)其中,ξ>0为预先指定的紧集上的误差界,满足|v[·]−ˆv[·]|<ξ.e2(k)=y(k)−ˆθ2(k−1)T X(k−1)−ˆv[·](35)然后,由式(20)和确定等价原则可知,非线性自适应控制器方程为ˆθ2(k)T X(k)=w(k+1)−λ1(1−z−1)u(k)−[λ2(1−z−1)+1]ˆv[X(k)](36)其中ˆθ2(k)T=[ˆg2,0(k),···,ˆg2,n−1(k),ˆh2,0(k),···,ˆh2,n−1(k)] 3.2.3切换机制切换机制由线性模型、非线性模型以及切换函数组成.采用类似于文献[1]的方法可得切换函数为J j(k)=kl=1µj(l)[e2j(l)−4γ(l−1)2]2[1+X(l−1)T X(l−1)]+ckl=k−N+1[1−µj(l)]e2j(l)(37)µj(k)=1,|e j(k)|>2γ(k−1)0,其他(38)其中,当j=1时,e1表示采用线性模型时的辨识误差;j=2时,e2表示采用非线性模型时的辨识误差.N是正整数,c>0是一个常数.e1(k)和e2(k)的值分别由式(26)和式(35)计算.任意时刻k,切换机制选择最小的切换函数所对应的控制器来控制系统,即J∗(k)=min[J1(k),J2(k)]如果J∗(k)=J1(k),选择u1(k);如果J∗(k)=J2(k),选择u2(k).4稳定性和收敛性分析为了证明本文所提控制方法的稳定性和收敛性,首先建立以下几个引理.引理1.辨识算法(22)∼(26)具有下面的性质:1) ˆθ1(k)−θ ≤ ˆθ1(0)−θ ;2)limk→∞Nk=1µ1(k)[e21(k)−4γ(k−1)2]2[1+(k−1)T(k−1)]<∞;3)limk→∞µ1(k)[e21(k)−4γ(k−1)2]2[1+X(k−1)T X(k−1)]=0.辨识算法(28)∼(35)具有下面的性质:4) ˆθ2(k)−θ ≤ ˆθ2(0)−θ ;5)limk→∞a(k)[e22(k)−4ξ2]2[1+X(k−1)T X(k−1)]=0.证明.令:˜θi(k)=ˆθi(k)−θ,i=1,2采用类似于文献[1]的方法容易证得引理1的结论成立,这里不再赘述.引理 2.当自适应算法(22)∼(26)和算法(28)∼(35)分别作用于系统(4)时,系统的输入输出动态方程为Γ00Γy(k+1)u(k)=B(z−1)A(z−1)w(k+1)+λ1(1−z−1)−1v[·]+B(z−1)A(z−1)e1(k+1)(39)Γ00Γy(k+1)u(k)=B(z−1)A(z−1)w(k+1)+λ1(1−z−1)−1v[·]−B(z−1)λ2(1−z−1)A(z−1)λ2(1−z−1)ˆv[·]+B(z−1)A(z−1)e2(k+1)(40)778自动化学报37卷其中,Γ(z−1)=B(z−1)+λ1(1−z−1)A(z−1).证明.由式(26)和式(27)可得e1(k+1)=y(k+1)−ˆθ1(k)T X(k)=y(k+1)−w(k+1)+λ1(1−z−1)u(k)(41)将式(41)两边同时乘以B(z−1),将式(4)两边同时乘以λ1(1−z−1),并把所得的结果相加可得:Γy(k+1)=B(z−1)e1(k+1)+B(z−1)w(k+1)+λ1(1−z−1)v[·](42)将式(41)两边同时乘以A(z−1),将式(4)两边同时乘以P(z−1)并把所得的结果相加可得:Γu(k)=A(z−1)w(k+1)+A(z−1)e1(k+1)−v[·](43)联立式(42)和式(43),可得式(39).采用类似于上面的证明方法可得式(40).引理3.考虑下列n阶时不变非线性系统x(k+1)=A x(k)+B u(k)+f(x(k),u(k))x(0)=x0y(k)=(k)+h(x(k))式中,u(k),y(k)分别是p×1和m×1维输入和输出向量,x(k)为n×1维状态向量.假设A是渐近稳定的,并且x(k)) ≤ε3 x(k) +ε4f(x(k),u(k)) ≤ε5 x(k) +ε6 u(k) +ε7其中,εi≥0(i=3,···,7)为已知的常数.如果ε5足够小,则存在与k无关的常数C1和C2,使得|y i(k)|≤C1+C2max0≤τ≤ku(τ)对所有的1≤k<∞,0<C1<∞,0<C2<∞,i=1,···,m.证明.由引理3的状态方程,通过逐次迭代可得:y(k)=CA k x0+(x(k))+kj=1CA j−1B u(k−j)+kj=1CA j−1f(x(k−j),u(k−j))因此,可以证明:|y i(k)|≤ y(k) ≤ C k x0 + h(x(k)) +kj=1C j−1 B u(k−j) +kj=1C j−1 f(x(k−j),u(k−j)) ≤C x0 ·Kλk+ h(x(k)) +kj=1C ·Kλj−1 B u(k−j) +kj=1·Kλj−1 f(x(k−j),u(k−j)) ≤K1λk+ h(x(k)) +K2kj=1λj−1 u(k−j) + K3kj=1λj−1 f(x(k−j),u(k−j))其中,K1= C x0 ·K,K2= C ·K,K3= C ·K.上面第2个不等式运用了下列结论[17]:因为A是渐近稳定的,所以, A j ≤Kλj,0<λ<1及0≤K<∞.由假设条件:h(x(k)) ≤ε3 (x(k) +ε4f(x(k),u(k)) ≤ε5 x(k) +ε6 u(k) +ε7可进一步推得:|y i(k)|≤ y(k) ≤K1λk+ x(k)) +K2kj=1λj−1max0≤τ≤ku(τ) + K3kj=1λj−1 f(x(k−j),u(k−j))≤K1λk+ε3 x(k) +ε4+K21−λmax0≤τ≤ku(τ) + K3kj=1λj−1[ε5 x(k−j) +ε6 u(k−j) +ε7]≤K1λk+ε3 x(k) +ε4+K21−λmax0≤τ≤ku(τ) + K3ε5kj=1λj−1 x(k−j) +K3ε61−λmax0≤τ≤ku(τ) + K3ε71−λ=K1λk+K3ε71−λ+ε4+K21−λ+K3ε61−λ×max0≤τ≤ku(τ) +ε3 x(k) +K3ε5kj=1λj−1 x(k−j)(44)7期柴天佑等:基于未建模动态补偿的非线性自适应切换控制方法779又因为:x(k) ≤ A x(k−1) + B u(k−1) +ε5 x(k−1) +ε6 u(k−1) +ε7对上式中的x(k−1)进行逐次迭代有:x(k) ≤( A +ε5)k x0 +kj=0( A +ε5)j−1( B +ε6) u(k−j) +kj=0( A +ε5)j−1ε7≤(Kλ+ε5)k x(0) +ε7[1−(Kλ+ε5)k] 1−Kλ−ε5+1−(Kλ+ε5)k) 1−(Kλ−ε5)( B +ε6)max0≤τ≤ku(τ)对上面的不等式,当ε5满足条件:0≤ε5≤1−Kλ那么,存在C1>0,C2>0可使下面的不等式成立:(Kλ+ε5)k x0 +ε71−(Kλ+ε5)k)1−Kλ−ε5≤C11−(Kλ+ε5)k1−Kλ−ε5( B +ε6)≤C2因此x(k) ≤C1+C2max0≤τ≤ku(τ)同理,存在C3>0,C4>0使得下式成立.x(k−j) ≤C3+C4max0≤τ≤k−ju(τ) ≤C3+C4max0≤τ≤ku(τ)所以|y i(k)|≤ y(k) ≤K1λk+K3ε71−λ+ε4+K21−λ+K3ε61−λmax 0≤τ≤k u(τ) +ε3[C1+C2max0≤τ≤ku(τ) ]+K3ε5 1−λ[C3+C4max0≤τ≤ku(τ) ](45)令K1λk+K3ε71−λ+ε4+ε3C1+K3ε51−λC3≤C1K21−λ+K3ε61−λ+ε3C2+K3ε5C41−λ≤C2则由式(44)可得|y i(k)|≤ y(k) ≤C1+C2max0≤τ≤ku(τ)定理1.假定系统(4)满足如下假设条件:1)构成A(z−1)和B(z−1)的参数在紧集Ω中变化,并且未知,B(1)=0;2)系统的阶次n已知;3)非线性部分v[·]满足条件1).凑试λ1使其满足B(z−1)+λ1(1−z−1)A(z−1)=0,|z|≥1(46)则当自适应控制算法(22)∼(35)以及切换机制作用于系统(4)时,闭环切换系统BIBO稳定.而且,当k→∞时,系统的广义跟踪误差满足:|e g(k)|≤2sup[γ(k−1)]+ε其中,ε为任意小的正数,e g(k+1)定义为e g(k+1)=y(k+1)−w(k+1)+λ1(1−z−1)u(k)+λ2(1−z−1)v[·]证明.首先证明单独使用线性自适应控制算法(22)∼(26)时,闭环系统输入输出信号有界.由假设3)、引理2中的式(39)、引理3、式(46)以及w(k+1)的有界性可知,存在正常数C1,C2,C3,C4满足:|y(k)|≤C1+C2max0≤τ≤k|e1(τ)||u(k−1)|≤C3+C4max0≤τ≤k|e1(τ)|由于X(k−1)=[y(k−1),···,u(k−1),···]T,因此存在正常数C5,C6满足:X(k−1) ≤C5+C6max0≤τ≤k|e1(τ)|(47)由引理1的性质3)limk→∞µ1(k)(e1(k)2−4γ(k−1)2)2(1+X(k−1)T X(k−1))=0(48)因为|e(k)|>2γ(k−1)时,µ1(k)=1;|e(k)|≤2γ(k−1)时,µ1(k)=0.所以式(48)中的分子是非负的.由式(47)和式(48)以及类似于文献[18]中的引理3.1可知,X(k−1)有界,即单独使用线性自适应控制器时,闭环系统BIBO稳定.其次,证明当自适应控制算法(22)∼(35)以及切换机制作用于系统(4)时,闭环切换系统输入输出信号有界.780自动化学报37卷由假设3)、引理2中的式(40)、引理3、式(46)以及w(k+1)的有界性可知,存在正常数C7和C8满足:X(k−1) ≤C7+C8max0≤τ≤k|e2(τ)|(49)因此,结合式(47)和式(49),在每一时刻,对闭环系统总有下式成立.X(k−1) ≤C9+C10max0≤τ≤k|e(τ)|(50)其中,C9和C10为正常数,e(τ)=e1(τ)或者e(τ)=e2(τ).由式(37)和µi(i=1,2)的定义可知,切换函数J1(k)的第2项总是有界.结合引理1的性质2)可知,J1(k)有界.对于J2(k),在k时刻存在以下两种情况:1)J2(k)<J1(k)此时,根据切换机制,系统切换到非线性自适应控制器(36).由于J2(k)<J1(k)且J1(k)总是有界,所以J2(k)有界.由切换函数(37)和J2(k)的有界性可得lim k→∞µ2(k)[e2(k)2−4γ(k−1)2]2[1+X(k−1)T X(k−1)]=0(51)由µ2(k)的定义可知,式(51)中的分子非负.由式(49)和式(50),采用类似于文献[18]中的引理3.1可知,X(k−1)有界,即闭环系统输入输出信号有界.2)J1(k)≤J2(k)根据切换机制,系统切换到线性自适应控制器(27)来控制系统.由前面的分析可知,闭环系统输入输出信号有界.综上,无论切换系统采用线性自适应控制器(27)或非线性自适应控制器(36),闭环切换系统的输入输出信号总是有界,即闭环系统BIBO稳定.下面进行收敛性分析.综合引理1的性质3)和式(51)可知,切换系统的辨识误差e(τ)=e1(τ)或者e(τ)=e2(τ)均满足下式:lim k→∞µj(k)[e(k)2−4γ(k−1)2]2(1+X(k−1)T X(k−1))=0(52)由式(52)以及X(k−1)的有界性可知,对辨识算法(22)∼(35)总有limk→∞µj(k)[e(k)2−4γ(k−1)2]=0(53)由µj(k)的定义和式(53)可得:lim k→∞sup[e(k)2]≤sup[4γ(k−1)2]因此,下面的不等式成立:limk→∞sup[e(k)]≤2sup[γ(k−1)](54)由e g(k)的定义以及式(26)、式(27)、式(35)和式(36)可得在每一时刻,e g(k+1)=e1(k+1)+λ2(1−z−1)v[X(k)](55)或者e g(k+1)=e2(k+1)+λ2(1−z−1)[v[X(k)]−ˆv[X(k)]](56)综合式(54)∼(56)可知,对任意小的正数ε,存在时刻K,当k>K时,|e g(k)|=|e(k)|≤2sup[γ(k−1)]+ε(57)注2.对辨识算法(28)∼(35),由引理1的性质2)以及X(k−1)的有界性可得,对任意小的正数ε,存在时刻K,当k>K时,|e2(k)|≤2ξ+ε(58)ξ是预先指定的紧集上的误差限,满足|ζ[·]−ˆζ[·]|≤ξ由于模糊系统是万能逼近器,它能以任意精度逼近紧集上的任意函数[8].只要把输入空间划分得足够细,选择足够多的隶属函数,就可使ANFIS逼近误差充分小,即ξ→0.因此,非线性自适应控制器可使系统的广义跟踪误差收敛到原点的小邻域内.即:¯e g(k)=|e2(k)|≤ε ,ε =2ξ+εε 为与ξ有关的正数.5仿真实验与水箱控制实验5.1对未建模动态v[X(k)]估计的比较为了体现ANFIS的优点,采用文献[1]中的非线性系统进行仿真对比实验.y(k+1)=2.6y(k)−1.2y(k−1)+u(k)+0.5u(k−1)+sin[u(k)+u(k−1)+y(k)+y(k−1)]−u(k)+u(k−1)+y(k)+y(k−1)1+u(k)2+u(k−1)2+y(k)2+y(k−1)2显然,该系统的高阶非线性项v[X(k)]即sin[u(k)+u(k−1)+y(k)+y(k−1)]−7期柴天佑等:基于未建模动态补偿的非线性自适应切换控制方法781u(k)+u(k−1)+y(k)+y(k−1) 1+u(k)2+u(k−1)2+y(k)2+y(k−1)2是全局有界的.分别用ANFIS和BP神经网络对其进行估计,网络的输入量是X(k)=[u(k),u(k−1), y(k),y(k−1)]T.首先通过映射α把输入数据转化为˜y(k),˜y(k−1),˜u(k),˜u(k−1),并以此作为ANFIS和BP神经网络的输入,通过式(31)得出v[X(k)]的估计值ˆv[X(k)](在下面的例子中均采用该映射α来预先处理网络的输入数据,故下文将不再重述).两种方法比较结果如图4∼6所示.图4采用ANFIS估计v[X(k)]的效果Fig.4The estimated effect of v[X(k)]byANFIS图5采用BP神经网络估计v[X(k)]的效果Fig.5The estimated effect of v[X(k)]by BP neuralnetworks.图6ANFIS和BP神经网络的估计误差比较Fig.6The estimated error comparison of ANFIS and BPneural networks图4是采用ANFIS经过100次迭代训练后估计v[X(k)]的效果.在仿真中,ANFIS采用网格划分法对输入空间进行划分,每个输入量的模糊子集个数取为3,隶属函数选为高斯型.图5是采用两层BP神经网络经过100次迭代训练后估计v[X(k)]的效果.在仿真中,BP神经网络隐含层节点数l=18,激活函数为S型传输函数;输出层的激活函数取线性传输函数.学习率lr=1,动量因子mc=0.95.比较图4和图5可以看出,ANFIS比BP神经网络对v[X(k)]的估计精度高,而且,当经过100次训练后,基于网格法的ANFIS输出的均方误差为0.0081,BP神经网络输出的均方误差为0.0394.因此,ANFIS提高了对未建模动态的估计精度和网络的收敛速度.图6为ANFIS和BP神经网络估计高阶非线性项v[X(k)]的误差比较结果.由图6中可以看出,整体上ANFIS的逼近误差比BP神经网络的小.这主要是因为ANFIS采用最小二乘估计算法调节模糊系统中的结论参数,而条件参数采用误差反向传播算法来调节,以此种方式对给定的条件参数,可以得到结论参数的全局最优点,这样降低梯度法中搜索空间的维数,提高了逼近精度,减小了逼近误差.从训练数据中随机抽取10组数据并分别计算ANFIS和BP网络逼近系统未建模动态的相对误差,结果如表1和表2所示.表1ANFIS逼近未建模动态的相对误差Table1The relative errors of approaching theunmodeled dynamics by ANFIS原始数据ANFIS估计值相对误差0.921 1.14960.248260.65150.651720.000342910.256140.256180.00015232−0.89518−0.89710.00213980.76150.703940.075578−0.35991−0.443330.231790.435890.275680.36753−1.0124−1.04190.029198−0.85309−0.861280.0095952−0.25501−0.238860.063346通过比较表1和表2,很明显,ANFIS逼近系统未建模动态的相对误差比BP网络的小.进一步探讨网络内部的学习算法:1)ANFIS假设各输入输出分割数是预先确定的,网络需要学习的参数主要是模糊系统后件网络中的连接权p kij(j=1,2,···,m;i=1,2,···,n;k= 1,2,···,r.m为节点个数;n为输入量的维数;r 为模糊规则数)以及前件网络第2层各节点中隶属函数的中心c ij和宽度δij(i=1,2,···,m;j= 0,1,···,m i),m=ni=1m i,m i为输入分量的模糊分割数.ANFIS的误差代价函数为782自动化学报37卷E=12ri=1(t i−y i)2式中,t i和y i分别表示期望输出和实际输出.c ij和σij的学习算法为c ij(k+1)=c ij(k)−β∂E ∂c ijδij(k+1)=δij(k)−β∂E ∂δij其中,β>0为学习率.表2BP网络逼近未建模动态的相对误差Table2The relative errors of approaching theunmodeled dynamics by BP neural networks原始数据BP估计值相对误差0.921 1.40490.525390.65150.534540.179530.256140.192390.24888−0.89518−0.376470.579450.76150.794230.042985−0.35991−0.392310.090030.435890.48880.1214−1.0124−0.955060.056624−0.85309−0.707090.17115−0.25501−0.0516390.79752)BP神经网络BP神经网络对N个训练样本的总的误差函数为E=Np=1E p=12Np=1Lk=1(t pk−y pk)2其中,N为模式样本对数;L为网络输出节点数.网络输入输出层权系数w ij和w kj(i,k分别为隐含层和输出层的节点数)均按照误差函数梯度变化的反方向调整来使网络收敛.如何设置w ij和w kj 的初值非常重要,但一般设置为随机数.通过上述比较,虽然ANFIS是局部逼近网络,但是它是按照模糊系统模型建立的,网络中的各个节点及所有参数均具有明显的物理意义,这些参数的初值可以根据系统的模糊或定性的知识来加以确定.同时,ANFIS具有神经网络的结构,参数的学习和调整比较容易.利用混合学习算法可以很快收敛到期望的输入输出关系.而BP神经网络的参数一般取随机数,具有不确定性,且网络的结构仍需凭借经验和凑试法.所以,ANFIS优于单纯的BP神经网络.5.2v[X(k)]有界时控制效果的比较当v[X(k)]有界时,我们选用下面的离散时间零动态不稳定的非线性系统做仿真对比实验.y(k+1)=2.6y(k)−1.2y(k−1)+u(k)+1.2u(k−1)+sin(u(k)+u(k−1)+y(k)+y(k−1))−u(k)+u(k−1)+y(k)+y(k−1) 1+u(k)2+u(k−1)2+y(k)2+y(k−1)2因此,A(z−1)=1−2.6z−1+1.2z−2,B(z−1)= 1−1.2z−1,n=2,高阶非线性项全局有界,(0,0)为系统的平衡点,并且系统在(0,0)附近零动态不稳定.离线选择加权项P(z−1)=1,R(z−1)=1, Q(z−1)=0.2(1−z−1),K(z−1)=0.1(1−z−1),则闭环系统的特征多项式为P(z−1)B(z−1)+Q(z−1)A(z−1)=1.2+0.48z−1+0.76z−2−0.24z−3其特征根分别为:−0.3255±0.8311i,0.2510,均在单位圆内.参考输入信号为w(k)= 3sign[sin(πk/50)].系统的初始状态为y(0)=0, u(0)=0.下面用本文所提的控制方法来设计控制器,并分别用ANFIS和BP神经网络来估计系统的高阶非线性项,并对控制效果作仿真比较.在仿真中,选择切换函数中的参数N=2,c=1.ANFIS的隶属度函数选为高斯型,对每个输入量划分为3个模糊子集.BP神经网络隐含层节点数l=18.仿真结果如图7∼10所示.通过比较图7和图9可以看出,采用基于AN-FIS和多模型切换的非线性自适应控制算法时,系统的控制效果有了明显的改善,跟踪性能也得到了显著提高.两种控制算法对应的系统输入输出幅值大小如表3所示.表3ANFIS与BP神经网络控制的幅值比较Table3Comparison of amplitudes by ANFIS and BPneural networks controlu,y幅值比较ANFIS BP网络u min−9.2020−10.4320u max9.20939.5347y min−4.5629−6.3798y max 4.5561 5.8046图7基于ANFIS与多模型切换系统的性能(输出y,参考输入w,控制输入u)Fig.7Performance of the switching system based on ANFIS and multiple models(output y,reference input w,control input u)图8切换序列(1表示线性,2表示非线性)Fig.8Switching sequence(1denotes linear;2denotesnonlinear)由表3可以看出,采用本文所提的控制算法提高了控制精度,与用BP网络相比,本文的控制方法输入幅值较小,输出超调量也较小.另外,从图7中可以看出,采用本文所提的控制方法使得系统进入稳态的时间短,收敛速度快.图8和图10是相应的控制器切换序列.图9采用BP网络时切换系统的性能(输出y,参考输入w,控制输入u)Fig.9Performance of the switching system by BP neural networks(output y,reference input w,control input u)图10采用BP网络时控制器切换序列(1表示线性,2表示非线性)Fig.10Switching sequence(1denotes linear;2denotesnonlinear)5.3本文所提方法的仿真实验当v[X(k)]满足线性增长条件时,为了说明本文所提控制方法的有效性,考虑如下的离散时间零动态不稳定的非线性系统:y(k+1)=2.6y(k)−1.2y(k−1)+u(k)+1.2u(k−1)+0.5y(k)sin(u(k)+u(k−1)+y(k)+y(k−1))易知该系统高阶非线性项0.5y(k)sin(u(k)+u(k−1)+y(k)+y(k−1))满足条件1,仿真中取ε1=ε2=0.01.其余的加权多项式和参数选择方案均与第5.2节相同.在仿真中,ANFIS经过100次迭代训练后切入控制,其控制效果如图11和图12所示.图11基于ANFIS与多模型切换系统的性能(输出y,参考输入w,控制输入u)Fig.11Performance of the switching system based on ANFIS and multiple models(output y,reference input w,control input u)图12切换序列(1表示线性,2表示非线性))Fig.12Switching sequence(1denotes linear;2denotesnonlinear)由图11可知,当v[X(k)]满足线性增长条件,采用本文控制方法时,闭环系统的输入u(k)和输出y(k)均是有界的,而且系统具有良好的跟踪特性.图12为系统的切换序列.从图12中可以看出,大部分时间是基于ANFIS的非线性自适应控制器在工作;只有当参考输入发生突变,控制输入震荡较剧烈时,为保证系统稳定,线性自适应控制器才投入工作.5.4水箱的液位控制实验将本文所提的方法应用在多功能过程控制实验平台上进行水箱的液位控制实验.控制目标是通过调节水泵的脉冲(Pulse width modulation,PWM)占空比,从而改变水泵的电压,使得水箱的液位快速地保持在预设定的高度.在本文的仿真中,液位的设定值w=8cm.多功能过程控制实验平台主要由复杂控制算法软件包、嵌入式控制器和水箱3个部分组成.其中,复杂控制算法软件包安装在PC机中,可以用Matlab工具对自适应控制算法编程,然后下载到嵌入式控制器对水箱进行实时控制.水箱如图13所示,其工艺过程原理图如图14所示.图14中所涉及的符号含义如表4所示.图14所示的液位系统由水泵、流量传感器、液位传感器、泄水阀、水箱和控制器组成.本实验中泄水阀保持全开状态.水泵从蓄水池抽水,水流经过流量传感器进入水箱,最后,由泄水阀门排入蓄水池形成水流回路.图13水箱Fig.13Tank图14水箱液位控制工艺过程原理图Fig.14Schematic diagram of technology process for tanklevel control水箱液位的控制过程具有非线性,并存在滞后的特性,以水泵的PWM占空比为输入u(k),以液位的高度为输出的输入输出模型描述如下:A(z−1)y(k+1)=B(z−1)u(k)+v[X(k)]其中,v[X(k)]为水箱系统的未建模动态.为了使自适应控制算法简单,选择A(z−1)=1+a1z−1B(z−1)=b0根据水箱系统的输入输出模型,运用本文所提的方法进行自适应控制器设计,利用复杂控制算法软件包进行自适应控制算法的编程,然后下载到控制器中实现对单容水箱液位的自适应控制.实验中,液位的设定值w=8cm,加权因子选为λ1=0.003,λ2=0.01,式(5)中的ε1和ε2分别选为0.001和0.1,采样周期为0.1s.切换函数中的参数选为N=2,c=1.实验结果如图15∼19所示.。
数字电子技术 9AD转换

第九章 数-模和模-数转换
3位逐次比较 型A/D转换器 的原理图:
门G1~G9组成逻辑 控制电路
F三FA、位F环1F~数形FB和码F计5F寄组数C存成组器器5成位
第九章 数-模和模-数转换 初始条件:QaQbQc = 000 Q1Q2Q3Q4Q5=10000 1、常态:时钟运行,VL=0 2、启动:VL = 1,转换开始 3、第1个CP脉冲:QaQbQc = 100 Q1Q2Q3Q4Q5 = 01000
保持电路实际上 是使用了电容的存储 特性,实际使用时取 样与保持两个是合二 为一的。
当vL为高电平时,T导通。输入经 R1和T向电容CH充电;若取R1= RF, 充电结束后vo= vC= - vi ---采样。
当vL为低电平时,T截止。---保持
第九章 数-模和模-数转换
◆量化和编码
取样-保持后的信号仍然是一个时间上离散的模拟量,它 的取样信号取值是任意的,而数字信号的取值是有限的或离散 的,如用四位二进制数来表示,其只有0000~1111共十六种状 态,因此要实现幅度数字化就是用具体的数字量来近似表示对 应的模拟值,这个过程就是量化。
缓冲器的输出送到优先编码器,经过编码器将其输出的 状态转移为三位二进制信号。
第九章 数-模和模-数转换
并行比较型ADC的精度取决于:
(1) 量化电平的划分;划分越细(△越小),精度越高,比 较器和触发器的数目越多。
(2) 参考电压的稳定度。
(3) 分压电阻的精度和比较器的灵敏度。
从图上可以看出,当输出位数增加一位,其比较器的个 数增加一倍,由于比较器属于模拟电路,其集成度不是很高, 给制造带来不便,价格较高,一般较少使用。但这种转换电路 的最大优点是速度快,这是其它转换电路无法实现的,故在速 度较高的场合,如视频信号的ADC等常有使用。