导波雷达液位计信号处理模块设计
导波雷达液位计调试步骤两版带举例MR
导波雷达液位计调试步骤两版带举例MR 导波雷达液位计是一种常用的液位测量仪器,可以应用于各种工况和液体介质。
调试导波雷达液位计需要进行准确的标定和参数设置,以确保其测量结果的准确性和稳定性。
下面分别是两版导波雷达液位计的调试步骤,以及一些实际应用中的例子。
第一版调试步骤:1.安装:将导波雷达液位计安装在液位容器上,根据实际要求选择合适的安装方式,如顶装、侧装或杠杆式安装。
确保安装牢固,并且传感器与液位容器无任何物理接触。
2.连接:连接导波雷达液位计与控制系统,确保正确连接电源和信号线,并检查线缆是否接地良好。
建议使用双绞线或屏蔽电缆以减少电磁干扰。
3.参数设置:根据液体介质特性和工况要求,设置导波雷达液位计的相关参数,包括介质类型、介质密度、容器形状等。
这些参数可以在液位计的用户手册中找到,或者通过厂家的技术支持获取。
4.标定:进行导波雷达液位计的零点和满量程标定,以确保测量结果的准确性。
首先将液位计置于空置状态,调整零点参数,使得显示值与实际液位值一致;然后将液位计置于满量程状态,调整满量程参数,使得显示值与实际液位值一致。
5.验证:使用标准测量工具,如液位计或尺子,进行液位的实际测量,并将测量结果与导波雷达液位计的显示值进行对比。
如果存在偏差,可以调整标定参数或重新进行标定。
导波雷达液位计安装在储罐的顶部,并连接到控制系统。
根据化工液体的特性,设置导波雷达液位计的参数,如介质类型为液态、介质密度为1.2 g/cm³、容器形状为圆柱形。
然后进行零点和满量程标定,确保导波雷达液位计的显示值与实际液位值一致。
最后,使用液位计或尺子进行实际液位的测量,并将测量结果与导波雷达液位计的显示值进行对比。
第二版调试步骤:1.安装:将导波雷达液位计安装在液位容器上,保证传感器的安装位置平稳且无需物理接触。
确保导波雷达液位计与液位容器之间没有障碍物,以免影响测量精度。
2.连接:连接导波雷达液位计与控制系统,确保正确连接电源和信号线,并检查线缆是否接地良好。
一种雷达信号处理模块的设计和实现

一种雷达信号处理模块的设计和实现一种雷达信号处理模块的设计和实现现代雷达特别是机载雷达数字信号处理机的特点是输入数据多,工作模式复杂,信息处理量大。
因此,在一个实时信号处理系统中,雷达信号处理系统要同时进行高速数据分配、处理和大量的数据交换.而传统的雷达信号处理系统的设计思想是基于任务,设计者针对应用背景确定算法流程,确定相应的系统结构,再将结构划分为模块进行电路设计。
这种方法存在一定的局限性。
首先,硬件平台的确定会使算法的升级受到制约,由此带来运算量加大、数据存储量增加甚至控制流程变化等问题。
此外,雷达信号处理系统的任务往往不是单一的,目前很多原来由模拟电路完成的功能转由数字器件来处理。
系统在不同工作阶段的处理任务不同,需要兼顾多种功能。
这些问题都对通用性提出了进一步要求[2].随着大规模集成电路技术、高速串行处理及各种先进算法的飞速发展,利用高速DSP和FPGA相结合的系统结构是解决上述问题的有效途径。
1雷达信号处理机方案设计1.1雷达信号处理的目的现代机载雷达信号处理的任务繁重,主要功能是在空空方式下将AD 数据录取后进行数字脉压处理、数据格式转换和重排、加权降低频谱副瓣电平,然后进行匹配滤波或相参积累(FFT或DFT)、根据重复频率的方式进行一维或二维CFAR处理、跟踪时测角等运算后提取出点迹目标送给数据处理机。
空地方式下还要进行地图(如RBM和SAR)等相关图像成像处理,最后坐标转换成显示数据送给显控处理机。
上述任务需要基于百万门级可编程逻辑器件FPGA与高性能DSP芯片作为信号处理模块,以充分满足系统的实时性要求,同时为了缩短机载雷达系统的研制周期和减少开发经费,设计的基本指导思想是通用化的信号处理模块,可以根据不同要求,通过软件自由修改参数,方便用户使用。
1.2系统模块化设计方案的功能模块,除了信号处理所必需的脉冲压缩模块、为MTD模块作准备的数据重排模块、FIR滤波器组模块、求模模块、恒虚警处理模块和显示数据存储模块外,还包括雷达同步信号和内部处理同步产生模块、自检数据产生模块以及不同测试点测试数据采样存储模块。
导波雷达液位计说明书
长恒仪表GDUL系列导波雷达物位计选型说明书淄博长恒仪表有限公司地址:山东省淄博市开发区鲁泰大道61号-2 邮编:255000 电话:0533-6219770 传真:0533-3588202北京办事处地址:北京市中关村北二条12号楼401室邮编:100080 电话:010-62581023 138********传真:010-62581023电子邮件:hcr6281@导波雷达物位计一、原理导波雷达物位计发出高频脉冲沿着导波组件(钢缆或刚棒)传播,当雷达波遇到被测介质时,由于介电常数发生突变,引起部分脉冲波的反射,并沿着导波组件还回。
介电常数变化越大,反射波越强。
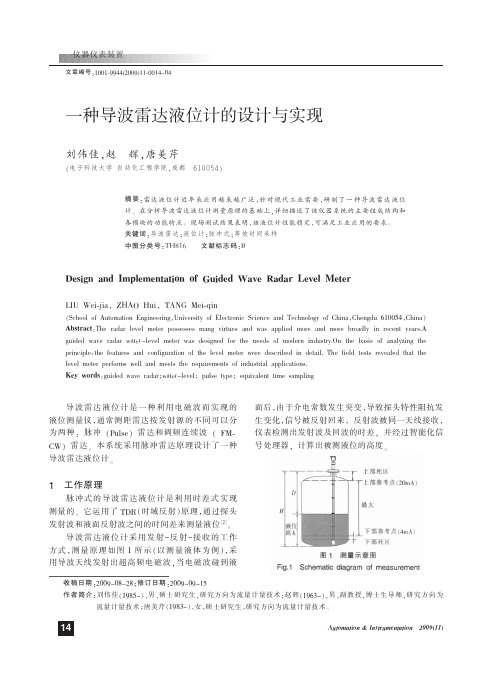
由于雷达波的传输速度是恒定的,所以雷达物位计只要计算出发射与接收雷达波的时间间隔,就可以计算出液位空高,量程减去空高就是实际液位高度。
以上是测量液位的原理,导波雷达物位计用于界面测量的原理与上面类似,测量的前提是上层介质比下层介质的相对介电常数小10以上,以便有足够大的回波信号供仪表判断。
二、特点z 采用EchoDiscovery 先进的回波处理技术;z 316L 、PTFE 和陶瓷材质,适合强酸强碱等腐蚀场合; z 应用范围广,料位、液位、界面均可测量;z 同轴、双棒、双缆导波组件,超低介电常数测量; z 独特的表头散热结构,适合高温高压介质液位测量。
三、技术参数1、 UL31普通型导波雷达物位计(见图1)应用场合:液体和固体均可 导波组件:钢缆和钢棒组件直径:Φ6、Φ8、Φ10mm 组件材质:316L /PTFE最大量程:钢缆-30米;钢棒-6米 测量精度:±10mm输出信号:两线制,4~20mA /HART 现场显示:液晶数字+棒图 电源电压:14~30VDC 工作压力:-1.0~40bar 工作温度:-40~150℃过程连接:G1½A G2A 1½NPT 电缆接线:M20×1.5或½NPT防爆等级:ExiaⅡCT6 图1 UL31型导波雷达物位计 防护等级:IP662、 UL32防腐型导波雷达物位计(见图2)应用场合:强腐蚀性液体 导波组件:Φ10mm PTFE 最大量程:6米 测量精度:±10mm输出信号:两线制,4~20mA /HART 现场显示:液晶数字+棒图 电源电压:14~30VDC 工作压力:-1.0~40bar 工作温度:-40~150℃ 过程连接:法兰PTFE电缆接线:M20×1.5或½NPT钢缆钢棒应用场合:小介电常数液体介质 组件型式:同轴 组件直径:Φ28mm组件材质:316L /PTFE 最大量程:6米 测量精度:±10mm输出信号:两线制,4~20mA /HART 现场显示:液晶数字+棒图 电源电压:14~30VDC 工作压力:-1.0~40bar 工作温度:-40~150℃ 过程连接:法兰316L电缆接线:M20×1.5或½NPT 防爆等级:ExiaⅡCT6防护等级:IP66 图3 UL33型导波雷达物位计 4、 UL34高温型导波雷达物位计(见图4)应用场合:高温高压液体介质 组件型式:钢缆和钢棒 组件直径:Φ8、Φ10mm 组件材质:316L /陶瓷最大量程:钢缆-30米;钢棒-6米 测量精度:±10mm输出信号:两线制,4~20mA /HART 现场显示:液晶数字+棒图 电源电压:14~30VDC 工作压力:-1.0~40bar 工作温度:-40~200℃过程连接:G1½A G2A 1½NPT 电缆接线:M20×1.5或½NPT 防爆等级:ExiaⅡCT6防护等级:IP66 图4 UL34型导波雷达物位计 5、 UL35超高温型导波雷达物位计(见图5)应用场合:高温高压液体介质导波组件:Φ6、Φ10mm/钢缆和钢棒 组件材质:316L /陶瓷 最大量程:钢缆-30米;钢棒-6米 测量精度:±10mm输出信号:两线制,4~20mA /HART 现场显示:液晶数字+棒图 电源电压:14~30VDC 工作压力:-1.0~400bar 工作温度:-200~400℃过程连接:G1½A G2A 1½NPT 电缆接线:M20×1.5或½NPT钢缆 钢缆钢棒钢棒应用场合:小介电常数液体和固体均可 导波组件:双钢缆和双钢棒 组件直径:Φ4、Φ8 组件材质:316L /PTFE最大量程:钢缆-30米;钢棒-6米 测量精度:±10mm输出信号:两线制,4~20mA /HART 现场显示:液晶数字+棒图 电源电压:14~30VDC 工作压力:-1.0~40bar 工作温度:-40~150℃过程连接:G1½A G2A 1½NPT 电缆接线:M20×1.5或½NPT 防爆等级:ExiaⅡCT6防护等级:IP66 图6 UL36型导波雷达物位计 四、安装要求z 避免接触容器内的设施和进出料口; z 建议安装于容器直径1/6~1/4处;z 量程范围内,导波缆、棒、管等不要碰壁; z 选择探头长度时,适当加长,安装时可以根据现场实际情况把探头剪短; z 容器接管的长度见图7所示。
一种导波雷达液位计的设计与实现
(2)信号的处理 由于过程级应用要求的测量范围最大为 20m, 误差小于 5mm 的高分辨率,对电磁波信号如果采用 直接测量一个周期发射脉冲和接收脉冲之间的时间 差值 Δt 的方法是很难达到效果的。等效时间采样是 针对周期性重复的高频信号的一种采样技术,由于 雷达液位仪发射和回波信号均为周期性重复信号, 它相当于将被测的极短时间量 Δt 放大,大大降低了
系统上电后 MCU 执行上电复位操作,然后开始 执行单片机的内部程序,软件流程图如图 6 所示。
首先执行系统初始化程序,程序会检查是否首 次上电,若是首次上电,此时程序自动进入系统参数 设置菜单。 需要设置的系统参数包括测量参数(例 如介电系数、杆长、阻尼时间等),标定参数,串行通 讯参数等。 设置的参数将自动存储到存储器中,以 便下一次使用时进行自动装载。 接着,系统用执行
平均误差
测量读数/mm 人工检尺/mm
841 ( 量 程 外 )
839
799
800.5
768
768.5
736
736
710
708.5
679
677
640
638
597
597
563
562.5
522
524
475
476
453
454
431
431.5
400
399
5 结语
本方案研制的导波雷达液位计, 系统运行稳 定,满足液位测量的过程级应用。 其工作性能稳定
仪器仪表装置
表 1 实际现场测试对比表 Tab.1 Comparison of the actual field test
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
雷达液位计和导波雷达液位计有什么区别

雷达液位计和导波雷达液位计有什么区别
原理:发射—反射—接收就是雷达液位计的基本工作原理。
雷达传感器的天线以波束的形式发射电磁波信号,发射波在被测物料表面产生反射,反射回来的回波信号仍由天线接收。
发射及反射波束中的每一点都采用超声采样的方法进行采集。
信号经智能处理器处理后得出介质与探头之间的距离,送终端显示器进行显示、报警、操作等。
特点:雷达液位计大的特点是在恶劣条件下功效显著。
无论是有毒介质,还是腐蚀性介质,也无论是固体、液体还是粉尘性、浆状介质,它都可以进行测量。
在测量方面,具有以下特点:
1、连续准确地测量
雷达液位计的探头与介质表面无接触,属非接触测量,能够准确、快速地测量不同的介质。
探头几乎不受温度、压力、气体等的影响(500℃时影响仅为0.018%,50bar时为0.8%)。
2、对干扰回波具有抑制功能
3、准确安全节省能源
雷达液位计采用材料的化学性、机械性都相当稳定,且材料可以循环利用,环保功效。
4、无须维修且可靠性强
微波几乎不受干扰,与测量介质不直接接触,几乎可以被应用于各种场合,如真空测量、液位测量或料位测量等。
由于材料的使用,对情况极其复杂的化学、物理条件都很耐用,它可以提供准确可靠、长期稳定的模拟量或数字量的物位信号。
5、维护方便,操作简单
雷达液位计具有故障报警及自诊断功能。
根据操作显示模块提示的错误代码分析故障,及时确定故障予以排除,使维护校正更加方便、准确,保障仪表的正常运行。
6、适用范围广,几乎可以测量所有介质
从槽罐体的形状来说,雷达液位计可以对球罐、卧罐、柱形罐、圆柱椎体罐等的液位进行。
3300系列导波雷达液位和界面变送器
电子装置和电缆连接位于独立 的隔室中,使操作更安全,并 提高防潮能力 模块化设计,可减少备件,并 能方便地更换表头,而无需打 开储罐
智能无线 THUM™ 适配器支持访问在线组态、 多变量数据和诊断数据
最大限度地减少维护工作,从而节省开支
• 没有需要维护的机械可移动部件 • 具有用户友好界面的软件通过回波曲线工具和记录功能可
对于扩展产品供应,需要额外的交货准备时间。
导波杆总长 (5) (厘米 / 英寸)
标准
XX
0–99 厘米或 0–11 英寸
过程连接 – 尺寸 / 类型 (其它过程连接请向厂家询问)
ASME / ANSI 法兰(6) (7)
标准
AA
2 英寸, 150 磅
AB
2 英寸, 300 磅
BA
3 英寸, 150 磅
导波杆长度单位
标准
E
英制 (英尺,英寸)
M
公制 (米,厘米)
导波杆总长 (5) (英尺 / 米)
标准
XX
0–23 米或 0–77 英尺
标准 ★ ★ ★ ★
标准 ★ ★ ★
标准 ★ ★
标准 ★ ★
标准 ★
5
罗斯蒙特 3300 系列
表 1. 3301 和 3302 液位和 / 或界面变送器的订购信息
★ 标准产品表示最普通的选项。为了实现最佳发货时间,建议选择带星号 (★) 的选项。
BB
3 英寸, 300 磅
CA
4 英寸, 150 磅
CB
4 英寸, 300 磅
扩展型
DA
6 英寸, 150 磅
EN (DIN) 法兰 (6) (7)
标准
储油罐导波雷达液位测量中的滤波器设计
置信度估计Conf()
Conf()>ThrConf 液位测量值
OriH()修正后液位RevH()
信号处理算法流程图
在大型储油罐的油脂储存中放油的频率较低>=
液位测量值OriH()
置信度Conf()
获取24h的测量值OriH是
(-+1,……,), 计算置信度Conf()
Conf()=0
3 置信度估计算法流程
是上述置信度估计算法的基本流程图个测量结果的置信度,算子是为了计算相邻测量值的液位变化绝对值的平均ΔHFlag()=0?
液位测量结果OriH()
N
液位修正值RevH()
RevH()=OriH()
计算ΔH()和ΔHFlag()
ΔHFlag()=2?
RevH()=RevH(-1)
ΔHFlag()=ΔHFlag(-1)?RevH()=RevH(-1)
RevH()=OriH()4 滤波算法流程图
表示液位采集间隔时间示相邻测量点的液位变化速率4)
图5 某个液位测量结果在滤波前后的比较
实验分析
结合实验结果可知,平均一阶差分能够很好地区分含噪声样本与不含噪声样本,因此,基于平均一阶差分的置信度具有对含噪测量结果的良好鉴别能力。
本文所述的滤波算法
通过调节电压激励电路的输入电压值或大小可以调节激励半径的大小。
德国vega雷达液位计模块调试中文分解说明-1.调试量程
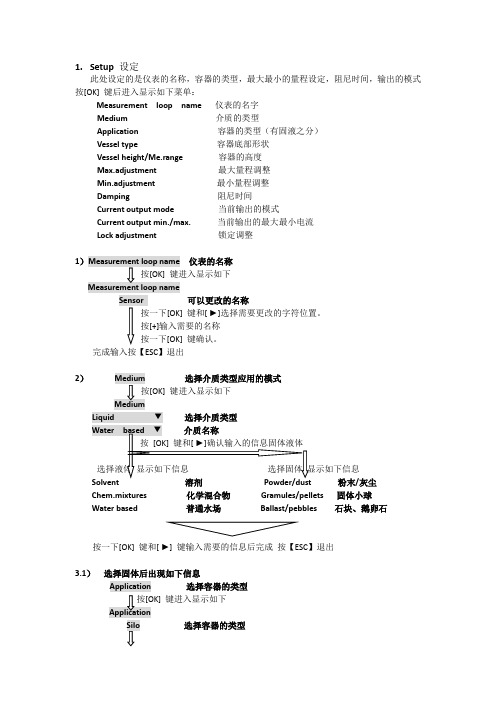
1.Setup 设定此处设定的是仪表的名称,容器的类型,最大最小的量程设定,阻尼时间,输出的模式按[OK] 键后进入显示如下菜单:Measurement loop name 仪表的名字Medium 介质的类型Application 容器的类型(有固液之分)Vessel type 容器底部形状Vessel height/Me.range 容器的高度Max.adjustment 最大量程调整Min.adjustment 最小量程调整Damping 阻尼时间Current output mode 当前输出的模式Current output min./max. 当前输出的最大最小电流Lock adjustment 锁定调整1仪表的名称可以更改的名称键和[ ►]选择需要更改的字符位置。
键确认。
完成输入按【ESC】退出2)粉末/灰尘Chem.mixtures 化学混合物Gramules/pellets 固体小球Water based 普通水场Ballast/pebbles 石块、鹅卵石按一下[OK] 键和[ ►]键输入需要的信息后完成按【ESC】退出3.1)选择固体后出现如下信息Application 选择容器的类型键进入显示如下选择容器的类型筒仓煤仓物位变化快的煤仓堆料压碎器演示按[OK]3.2)选择液体后出现如下信息Application 选择容器的类型储存罐储存罐带搅拌轮船上的储存罐反应器定量给料器导波管旁通管穿透测量开放水池水槽演示[ ►]键选择以上显示类型按[OK] 按【ESC】退出4)选择容器底部的类型键进入显示如下容器底部的类型可以选择的类型键显示顶部类型竖直的圆弧的有尖角的]键选择以上显示类型按[OK] 】退出5)选择容器的高度可以按照实际高度更改的数值键和[ ►]选择和更改的量程位置。
键确认。
6)最大数值校准键进入显示如下可以更改的百分比数可以更改的上空距离数[OK] 键和[ ►]选择和更改百分比数输入需要更改的数值可以更改的百分比数键确认后出现如下可以更改的上空距离数按一下[OK] 键和[ ►]选择和更改上空的距离值按[OK] ESC】退出7)最小数值校准键进入显示如下可以更改的百分比数可以更改的上空距离数[OK] 键和[ ►]选择和更改百分比数输入需要更改的数值可以更改的百分比数键确认后出现如下可以更改的上空距离数按一下[OK] 键和[ ►]选择和更改上空的距离值按[+]输入需要更改的数值按[OK] ESC】退出8) Damping 积分时间键确认后出现如下可以更改积分时间按一下[OK] 键和[ ►]选择和更改积分数值按[+]输入需要更改的数值按[OK] 键完成选择按【ESC】退出9)当前输出的模式输出电流的类型输出信号失败的模式不更改键显示此项是一般选择的电流输出方式[ ►]键和[OK]键选择和确认输出电流的类型此项是固定选取的项目[ ►]键按[OK] 】退出10) 设定当前电流的最大最小输出设定最小电流输出固定选择4mA设定最大电流输出固定选择20mA]键和[OK]键选择和确认输出的最小电流按[ ►]键和完成选择按【ESC】退出11)调试锁选择不同的状态是模块信息锁住不可以乱动封闭是否开锁[OK] 键后用[ ►]键和[OK]键输入值再按[OK] 键开启是否上锁按【ESC】退出。
雷达液位计的设置原理
雷达液位计的设置原理
雷达液位计的设置原理是利用雷达技术进行测量。
它使用微波信号在液体和气体介质之间传播,并通过测量信号的回波时间和强度来确定液位高度。
雷达液位计的设置原理包括以下几个步骤:
1. 发射信号:雷达液位计先发送一个微波信号,通常是射频脉冲,通过天线将信号发射到被测液体界面上。
2. 信号传播:发射的微波信号在液体和气体界面上反射,形成回波信号。
这些回波信号会返回到雷达液位计的接收器。
3. 信号接收:雷达液位计的接收器接收回波信号,并测量回波信号的时间。
4. 分析和计算:通过测量回波信号的时间,雷达液位计可以计算出信号从发射到接收器之间的时间差。
根据雷达的速度和时间差,可以确定液位的高度。
5. 显示和输出:通过将测量值转换为用户能理解的形式,雷达液位计可以实时显示液位高度,并且可以通过输出信号或控制系统进行数据记录和处理。
总体而言,雷达液位计的设置原理是通过测量发射信号与回波信号之间的时间差,来确定液位的高度。
这种原理适用于各种液体和气体介质,具有较高的精度和稳
定性。
一种隔离式导波雷达物位计的设计与实现
一种隔离式导波雷达物位计的设计与实现摘要隔离式导波雷达物位计是一种常用的工业测量仪器,具有精度高、可靠性强等优点。
本文基于该测量原理,设计并实现了一种新型的隔离式导波雷达物位计。
该物位计采用了单片机和数字信号处理器等先进技术,能够实现精确的测量任务。
实验结果表明,该物位计设计与实现均具有较好的性能和可靠性,能够满足多种工业应用需求。
关键词:隔离式导波雷达、物位计、单片机、数字信号处理器、精度高、可靠性强正文一、引言在工业生产过程中,物位测量是一项非常重要的任务。
传统的物位计测量方式有很多缺点,例如精度不高、易受干扰等等,因此需要采用更先进的测量技术来实现精确的测量。
隔离式导波雷达物位计是一种常用的测量仪器,具有精度高、可靠性强、抗干扰能力强等优点,因此在工业领域得到了广泛的应用。
本文基于该测量原理,设计并实现了一种新型的隔离式导波雷达物位计。
该物位计采用了单片机和数字信号处理器等先进技术,能够实现精确的测量任务。
实验结果表明,该物位计设计与实现均具有较好的性能和可靠性,能够满足多种工业应用需求。
二、隔离式导波雷达物位计的测量原理隔离式导波雷达物位计的测量原理是基于高频信号在介质中传输时的反射原理。
当一定频率的高频信号通过导波管准确的发射后,信号将被传播到探头的端部,然后反射回传回导波管,在不同介质界面处发生反射。
以此测得液位的深度。
三、设计与实现1.硬件设计隔离式导波雷达物位计的硬件设计采用单片机控制电路及数字信号处理器的组合设计。
硬件主要有信号发射与接收模块、信号处理模块和单片机控制模块,其中信号处理模块采用数字信号处理器进行处理。
2.软件设计隔离式导波雷达物位计的软件设计主要包括数据采集与处理等方面。
通过单片机控制模块采集数据,并将数据传输到数字信号处理器进行处理,最终将处理结果通过数码管进行显示。
四、实验结果分析实验结果表明,隔离式导波雷达物位计设计与实现均具有较好的性能和可靠性,能够满足多种工业应用需求。
e+h导波雷达液位计说明书

e+h导波雷达液位计说明书摘要:1.e+h 导波雷达液位计概述2.e+h 导波雷达液位计的工作原理3.e+h 导波雷达液位计的特点4.e+h 导波雷达液位计的应用领域5.e+h 导波雷达液位计的安装与维护正文:一、e+h 导波雷达液位计概述e+h 导波雷达液位计是一种采用导波雷达技术来测量液体或固体物位的仪表。
它通过发射能量波(一般为脉冲信号),并接收反射的能量波来测量物位高度。
e+h 导波雷达液位计具有高精度、高可靠性、易于安装和维护等特点,广泛应用于各种工业领域。
二、e+h 导波雷达液位计的工作原理e+h 导波雷达液位计的工作原理如下:1.发射装置发射能量波,能量波在波导管中传输。
2.能量波遇到障碍物(如液体表面)后反射,反射的能量波由波导管传输至接收装置。
3.接收装置接收反射信号,并根据测量能量波运动过程的时间差来确定物位变化情况。
三、e+h 导波雷达液位计的特点1.高精度:e+h 导波雷达液位计具有较高的测量精度,能够满足各种工业场合的要求。
2.高可靠性:采用先进的导波雷达技术,具有出色的抗干扰能力和较长的使用寿命。
3.较强的适应性:适用于各种液体、固体物位的测量,可广泛应用于不同场合。
4.易于安装和维护:e+h 导波雷达液位计结构简单,安装方便,且维护成本较低。
四、e+h 导波雷达液位计的应用领域e+h 导波雷达液位计广泛应用于以下领域:1.工业生产过程:如高贮仓、高煤仓或堆场等测量场合。
2.石油、化工、冶金等行业:用于测量各种液体、固体物位。
3.环保领域:如水位监测、污水处理等。
五、e+h 导波雷达液位计的安装与维护1.安装:选择合适的安装位置,保证能量波能顺利传输到接收装置,并避免安装在有较强干扰的环境中。
2.维护:定期检查导波雷达液位计的运行状况,发现问题及时处理。
罗斯蒙特 3300 系列导波 雷达液位和界面液位计

4
2013 年 9 月
快速安装指南
第 1 步:安装液位计表头 / 导波杆
螺母 螺栓
导波杆 垫片
液位计外壳 法兰
带法兰的储罐连接
1.在储罐法兰顶部布置一个垫片。 2.在液位计仍连接的情况下,将导波杆向下安放进
全写保护功能。
4.重新盖上封盖并拧紧。
在 LCD 上设置报警和写保护:
要使 LCD 的设置取代电路板设置,写保护开关需要处于 OFF (关)位置,报警开关需要处于 HIGH (高)位置。
1.要将 4–20 mA 报警输出设置为 LOW (低),请 在右侧孔位与中心孔位之间放置跳线。
2.要启用安全写保护功能,在左侧孔位与中心孔位 之间放置跳线 – ON (开)。
储罐中。
3.拧紧螺栓。 4.将连接液位计外壳和导波杆的螺母松开,旋转外
壳至所需位置。
5.拧紧螺母。
螺母
适配器 导波杆
储罐法兰
螺纹密封剂 (NPT)
或 垫片 (BSP/G) 储罐法兰 / 过程连接件
螺纹式储罐连接
1.对于带有 BSP/G 螺纹的适配器,将垫片放置于储 罐法兰的顶端。
2.在液位计仍连接的情况下,将导波杆向下安放储 罐中。
II 1/2 G Ex d [ia Ga] IIC T6…T1 Ga/Gb II —/2 D Ex tb IIIC T85 °C…T135 °C —/Db
含有 >7.5% 镁或锆的导波杆和法兰不允许在有粉尘的易爆环境中使用。更多信息请联系 Rosemount Tank Radar。
含有轻质金属的导波杆和法兰
雷达电子部件
雷达液位计毕业设计
雷达液位计毕业设计液位计是在工业生产中应用最广泛的一类仪表,它可以测量物体的高度,并可以用于熔锅、粗溶剂残留量以及罐液位的测量等。
为了满足实际应用的需要,本次毕业设计采用雷达液位计,研究如何实现它的全自动测量系统。
一、雷达液位计的原理雷达测量原理是通过一个发射器向物体发射脉冲波,然后用一个接收器接收物体的反射脉冲,并利用物体的物理特性计算出物体的距离,从而测量出物体的高度。
雷达液位计是应用雷达原理来测量储罐内液位的仪表,它在发射端发射一个高频脉冲,然后通过一个接收端接收反射回来的高频脉冲,最终通过信号处理电路进行信号处理,通过脉冲传输时间差计算出储罐内液位。
二、功能要求本次设计的目标是实现一个全自动的雷达液位测量系统,要求系统能够实时准确的测量出物体的高度,具有较高的稳定性和可靠性。
在功能上,系统需要具备以下功能:1.达发射和接收电路:实现雷达发射、接收和测量脉冲的传输,并能准确测量出物体的高度。
2.脉冲处理电路:利用数字信号处理技术,实现接收信号的质量判断,并根据测量出的脉冲传输时间差,计算出物体的高度。
3.据处理电路:利用数字信号处理技术,处理接收到的测量数据,从而实现对物体高度的测量。
4. 人机交互功能:实现测量结果的可视化显示和调节测量参数,从而满足实际应用的需求。
三、硬件设计为实现上述功能,本次设计采用STC89C51单片机作为系统的控制器,采用电路设计软件或元器件库设计电路原理图,搭建雷达发射和接收及接收信号处理的电路,使用LCD显示模块实现显示功能,采用连接线将电子元件连接起来,最终搭建出完整的雷达液位测量系统。
四、软件设计软件设计的目的是将上述功能实现在STC89C51单片机中,从而使系统达到自动测量的要求。
因此,我们采用Keil软件对单片机进行编程,根据流程图和伪代码编写C语言程序,实现上述功能,并且使用串口模块进行数据传输,从而实现自动测量功能。
五、结论本次设计采用雷达液位计,研究如何实现它的全自动测量系统。
VEGA导波雷达液位计FLEX81,82,83,86

VEGA导波雷达液位计FLEX81,82,83,861 测量原理1.1 测量原理高频率的的微波脉冲沿着一根缆、棒或包含一根棒的同轴套管运行,接触到被测介质后,微波脉冲被反射回来,被电子部件接收,并分析计算其运行时间。
微处理器识别物位回波,分析计算后将它转换成物位信号给出。
由于测量原理简单,VEGAFLEX 可以不带料调整,从而节省了大量调试费用。
测量缆或棒可以截短,使之更加适应现场的应用。
1.2 测量特点不受粉尘得影响粉尘强烈不会对测量造成影响。
不受噪音的影响VEGAFLEX 不受入料噪音的影响。
对于蒸汽不敏感即使在烟雾、噪音、蒸汽很强烈的情况下,测量精度也不受到影响。
不受介质特性变化的影响被测介质的密度变化或介电常数的变化不会影响测量精度。
粘附:没有问题在测量探头或容器壁上粘附介质不会影响测量结果。
应用范围广测量范围- 棒式:可达 6 米(由于运输原因可达 4 米,如果需要,可选多节棒式电极)- 缆式:可达75 米- 同轴管式可达6 米(由于运输原因可达4 米)过程温度和过程压力范围广泛,见技术参数一章。
界面测量VEGAFLEX81, 83, 86 都可以提供用于测量液体界面的类型,其应用区别取决于被测介质的化学特性和测量条件的要求,详见技术参数一章。
界面测量的前提条件高频的微波脉冲沿着测量缆或测量棒向下运行。
在接触到介质表面的时候,一部分微波脉冲被反射回来。
另一部分微波脉冲则穿透上一层液体介质,到达两种液体介 质的界面后被反射回来。
这两次被反射回来的微波脉冲的运行时间均被进一步分析处理。
界面测量1 基准面d1 到界面的举例(HART -数值 1 或初始值)d2 到上一层介质表面的举例(HART- 数值 3 或第 3 个数值)TS 上一层介质的厚度(d1-d2 )h1 高度-到界面h2 高度-到上一层介质表层L1 下一层介质L2 上一层介质L3 气层上一层介质(L2):可以为不导电介。
采用MSP430F149单片机的导波雷达液位计设计

图1 导波雷达液位计信号处理流程图电源电路设计根据导波雷达液位计使用工况的要求,系统使用+24V 直流来供电,系统电源电路如图3所示。
系统电源电路使用AD421芯片,AD421是一种可以产生4~20mA 电流输出的DAC [5]。
导波雷达液位计使用它实现回路供电,还为整个系统和其他电路的芯片等提供工作电源和相应的参考电源。
系统把AD421芯片的几个引脚的输出作为电源,使用它输出+5V 作为电源电压输出及产生+1.25V 和+2.5V 同时,单片机稳定工作还需+1.8V 到+3.6V 的电源电压,所以要把上述得到的+5V 电源转换到这个范围内(通常为+3.3V )。
本文采用HT7133芯片进行电源转换。
HT7133是一种功耗很低的输出电压为3.3V 的电压调节器,它只有3个端口,在其输入端之前采用二极管进行过流保护。
信号变换电路设计导波雷达液位计的单片机发出的控制信号必须通过信号变换变成相应据。
信号变换的计数器电路如图4所示。
所选芯片是74HC4040M ,它是一种12位的二进制纹波计数器。
作为时钟的输入端口,MR 则是它的实现异步主复位功能的输入端口和Q0~Q11为计数器的12个并行的输出端口。
在此选用了两个计数器,第一个计数器是把PWM0信号(460k 信号)进行8分频,第二个计数器再对8分频后的信号依次进行2分频后再分12位进行输出。
对于图中的每一路输出,如果图4 计数器电路图图5 DAC电路图图3 系统电源电路图图2 导波雷达液位计结构组成图PWM0和PWM1信号是单片机产生的周期性脉宽调制信号,分别为460k信号和周期100ms占空比30%的信号。
第一个计数器首先把PWM0信号进行8分频产生一个输出送到第2个计数器作为CP,再把这个分频后的信号再进行分频计数,进而得到12路并行的周期性计数信号(A0~A11),再送给12位DAC转换为模拟信号。
将PWM1作为第2个计数器的MR,可以来控制各路只有在高电平的30ms内有输出,得到的信号送至DAC进行转换。
导波雷达液位计调试步骤 两 版 带举例 MR

Magnetrol导波雷达液位计调试步骤1 键区有三个键用于滚动显示和校准变送器。
上下键()和回车键()。
箭头在显示模式中的功能在组态模式中的功能在组态程序中从一个显示项向前和后移动到另一个显示项增加或减少显示值或移动到另一个选项。
输入组态模式接受一个值并移动到组态程序的下一步。
变送器表头示意图2 组态问题对Eclipse变送器组态需要一些关键的参数。
在开始组态前首先填写下列运行参数表。
显示问题答案Probe Model 型号上所列的探头型号是什么?(探头型号上前面4个数字)705-510A-110/7MR-A118-327Probe Mount 探头安装形式是NPT(螺纹)、BSP(螺纹)还是flange(法兰)的?NPTLevel Units 测量单位(inches(英寸)、centimeters(厘米)、feet(英尺)或meters(米))cmProbeLength型号上所列的探头长度是多少?327Level Offset 液体在探头的末端时输出的液位读数。
根据实际水位对准(正常安装误差为-12cm)Dielectric 介质的电介质常数是多少?(界面测10~100量中最上层的电介质)Set 4.0 mA4mA 对应的0%的参考点是多少?0cmSet 20.0 mA 20mA 对应的100%的参考点是多少? 300cm (可根据现场确定,与DCS 量程一致)Threshld 阈值类型? CFD3 快速组态Eclipse 变送器出厂时均设为默认值可在现场重新组态。
下面给出了最小化的组态说明。
1、 变送器供电。
显示器上每隔5秒交替显示四个值:Status (状态)、Level (高度)、%Output (输出%)和Loop current (回路电流)。
2、 移走底部电子隔间的盖。
3、 使用上下键( )从组态程序的一个步骤转到另一个步骤。
4、 按回车键( )。
一个惊叹号(!)。
5、 使用上下键( )来增加或减少显示值或滚读选项。
导波雷达液位计回波信号处理模块设计方法研究

III
目录
目录
第一章 绪论 .....................................................................................................................1 1.1 液位计的研究背景及选题意义............................................................................ 1 1.2 导波雷达液位计国内外研究现状........................................................................ 3 1.2.1 雷达液位计的分类 ........................................................................................ 3 1.2.2 国内外研究现状 ............................................................................................ 4 1.3 论文的主要研究内容及章节安排 ........................................................................ 7
(保密的学位论文在解密后应遵守此规定)
作者签名:
导师签名: 日期:
年月日
摘要
摘要
导波雷达液位计作为一种测距仪表,相比其他传统的液位测量仪表,具有精 度和可靠性较高,实时性较好,能够在恶劣的环境下测量等优点,被广泛应用于 石油化工、冶金、锅炉等工业领域中。随着市场上对导波雷达液位计需求量的逐 渐增多,对其设计与开发有越来越重要的意义,并相继成为各大公司关注的热点。
fmcw雷达液位测量系统信号处理方法
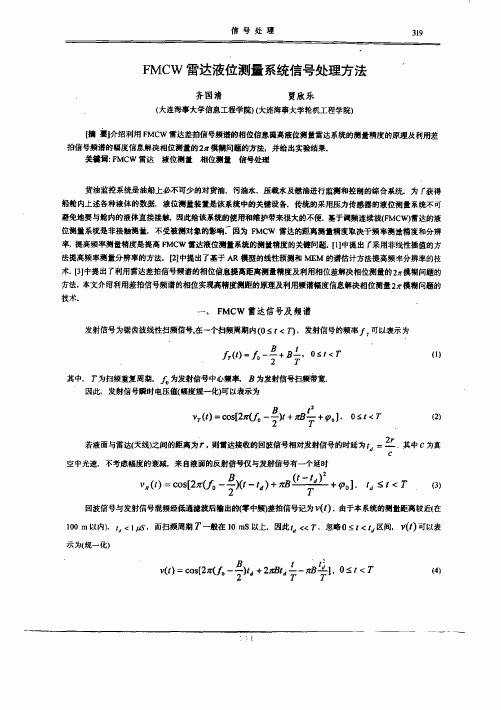
信号处理319FMCW雷达液位测量系统信号处理方法齐国清贾欣乐(大连海事大学信息工程学院)(大连海事大学轮机工程学院)【摘要】介绍利用FMCW雷达差拍信号频谱的相位信息提高液位测量雷达系统的测量精度的原理发利用差拍信号频谱的幅度信息解决相位测量的2石模糊问题的方法,并给出实验结果.关键词:FMCW雷达液位测量相位测量信号处理货油监控系统是油船上必不可少的对货油、污油水、压载水及燃油进行监测和控镧的综合系统.为r获得船舱内上述各种液体的数据,液位测量装置是该系统中的关键设备.传统的采用压力传感器的液位测量系统不可避免地要与舱内的液体直接接触,因此给该系统的使用和维护带来很大的不便.基于调频连续波(FMCW)雷达的液位测量系缆是非接触测量,不受被浏对象的影响.因为FMCW雷达的距离弱量精度取决干频率测世精度和分辨率,提高频率测量精度是提高FMCW雷达液位测量系统的测量精度的关键问题.【1】中提出厂采用非线性插值的方法提高频率测量分辨率的方法.【2】中提出了基于AR模型的线性预测和MEM的谱估计方法提高频率分辨率的技术.【3忡提出了利用雷达差拍信号频谱的相位信息提高距离测量精度及利用相位差解决相位测量的2石摸糊问题的方法.本文介绍利用差拍信号频谱的相位实现高精度测距的原理及利用频谱幅度信息解决相位测量21r模糊问题的技术.一、FMCW雷达信号及频谱发射信号为锯齿波线性扫频信号,在一个扫频周期内(0≤r<刀,发射信号的频率,,可以表示为刖)=^一詈+口;,O<t<T…其中,7’为扫频重复周期,fo为发射信号中心频率,B为发射信号扫频带宽.因此,发射信号瞬时电压值(幅度规—化)可以表示为V加)=州2,r眠一詈)H廊争+州,O<t<T(2)若液面与雷达(天线)之间的距离为广-则雷达接收的回波信号相对发射信号的时延为。
=等.其中c为真空中光速.不考虑幅度的衰减,来自液面的反射信号仅与发射信号有一个延时嘣f)=cos陬(fo一秒B训+魈华氓】.ta≤t<T(3)回波信号与发射信号混频经低通滤波后输出的C零中频)差拍信号记为V(f).由于本系统的测量距离较近(在]00m以内),f,<1,d.而扫频周期T一般在10mS以上.因此‘(<T.忽略。