24GHz雷达传感器的运用电路图
毫米波电路中的几个关键问题:设计传输线、选择PCB板、性能优化
毫⽶波电路中的⼏个关键问题:设计传输线、选择PCB 板、性能优化毫⽶波电路中的⼏个关键问题:设计传输线、选择PCB 板、性能优化在⾼频电路设计中,可以采⽤多种不同的传输线技术来进⾏信号的传输,如常见的同轴线、微带线、带状线和波导等。
⽽对于PCB平⾯电路,微带线、带状线、共⾯波导(CPW),及介质集成波导(SIW)等是常⽤的传输线技术。
但由于这⼏种PCB 平⾯传输线的结构不同,导致其在信号传输时的场分布也各不相同,从⽽在PCB材料选择、设计和应⽤,特别是毫⽶波电路时表现出不同的电路性能。
本⽂将以毫⽶波下通⽤的PCB平⾯传输线技术展开,讨论电路材料、设计等对毫⽶波电路性能的影响,以及如何优化。
1. 引⾔⼏年前,毫⽶波电路还仅仅⽤于航天、卫星通信、通信回传等特殊专有的领域。
然⽽,随着⽆线通信技术的飞速发展,对更⾼的数据传输速率、更⼩的传输延迟、更宽的带宽等需求促使毫⽶波频段逐渐被⽤在移动通信覆盖例如,802.11ad WiGig,5G 等领域;随着主动安全驾驶和未来⽆⼈驾驶技术的发展,汽车对测距测速的要求越来越⾼,毫⽶波也被使⽤在如77GHz的汽车雷达领域。
但是,对于设计⼯程师来说,毫⽶波电路的设计与低频段射频电路设计存在着显著的不同。
毫⽶波频段下不同传输线技术的⾊散辐射或⾼次模、阻抗匹配、信号的馈⼊技术等都将直接影响电路最终的性能。
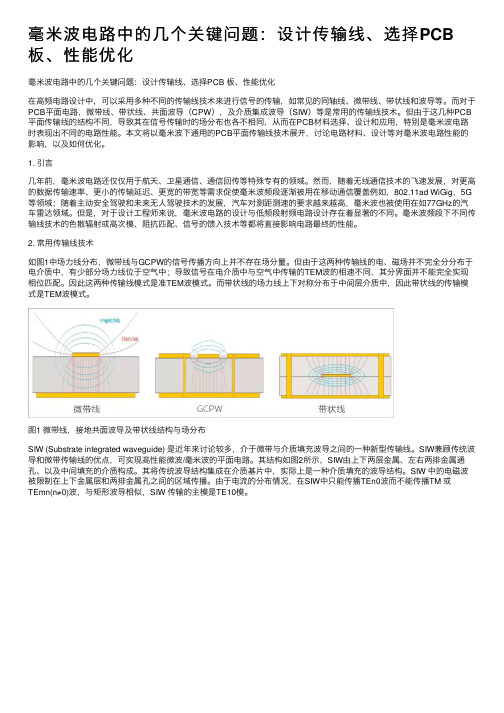
2. 常⽤传输线技术如图1中场⼒线分布,微带线与GCPW的信号传播⽅向上并不存在场分量。
但由于这两种传输线的电、磁场并不完全分分布于电介质中,有少部分场⼒线位于空⽓中;导致信号在电介质中与空⽓中传输的TEM波的相速不同,其分界⾯并不能完全实现相位匹配。
因此这两种传输线模式是准TEM波模式。
⽽带状线的场⼒线上下对称分布于中间层介质中,因此带状线的传输模式是TEM波模式。
图1 微带线,接地共⾯波导及带状线结构与场分布SIW (Substrate integrated waveguide) 是近年来讨论较多,介于微带与介质填充波导之间的⼀种新型传输线。
雷达传感器功能应用说明_V1.0

最大范围为 0.5V~10V;
调制频率:理论上最大不能超过 150kHz ,但建议探测远距离目标( 30~100m )时采用
100~200Hz 的调制频率,探测近距离目标(10~20m)时采用 500~1kHz 的调制频率。
深圳市华儒科技有限公司
SHENZHEN HUARU TECHNOLOGY CO.,LTD.
雷达传感器功能应用说明探测动态目标的距离和速度ivs系列雷达产品均适于同时探测动态目标的距离和瞬时速度探测过程中既产生时间延迟效应又有多普勒效应即同一时刻发射信号和目标回波信号的频率差异是由时间延迟效应和多普勒效应共同引起的
雷达传感器功能应用说明 24GHz 平面天线雷达
技术支持手册Ⅰ V 1.0 2012.06
2. 设置调制信号 探测静态目标的距离,即静态目标到传感器之间的距离,调制信号采用锯齿波即可。这是因为, 此时的干扰大多为多普勒信号,而在抗干扰性能方面,锯齿波调制要优于三角波调制。选用线性升 坡曲线或者降坡曲线作为发射频率的时间相关函数,并定期重复这些波,以期得到可能的平均值。
调制幅度:选取调谐曲线中线性度最好的一段确定 Vtune 的调节范围。理论上,调制幅度
声
明
本手册内容仅供参考。本公司有权对本手册内容进行定期变更,恕不另行通知。变更内容将
会补充到新版本资料中,请及时联系本公司获取最新资料。
24GHz 平面天线雷达:雷达传感器功能应用说明
1 概述
雷达是利用电磁波探测目标的电子设备,其工作原理可简述为:发射电磁波对目标进行照射并 接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。 目前常用的雷达工作频段有: 10.525GHz——X 波段, 24 GHz——K 波段, 35 GHz——Ka 波段, 77 GHz——V 波段。 目前,我公司的主营业务是 24GHz 即 K 波段微波雷达产品。24GHz 是 ISM 规定的全球通用的 一个雷达工作频段,在此频段上工作时所受干扰较小。 我公司所代理的 24GHz 微波雷达传感器均为德国 InnoSenT 公司生产, 其采用世界最先进的平 面微带技术,具有体积小、集成化程度高、感应灵敏等特点。产品多工作于 CW 和 FMCW 模式, 功能应用多样,包括:探测动态目标的速度、静态目标的距离、动态目标的距离和速度、目标的方 位(角度测量)以及判别运动的方向。
ADI新型雷达传感器系统应用的详细资料概述
ADI新型雷达传感器系统应用的详细资料概述ADI公司特地开发了一款新颖的24GHz雷达系统级原型解决方案(称为DemoRAD, 演示雷达),可以在整个系统参考设计中实现硬件和软件应用开发。
演示雷达平台提供硬件和软件,支持快速评估和开发24 GHz雷达,且无需RF微波和信号链系统专业知识,因此可在产品开发阶段大大降低开发时间,并减少系统专业知识需求。
随着新型射频雷达传感器应用的出现,24GHz硅基毫米波雷达技术正在越来越多地用于汽车、无人机、泛工业和消费类应用等大众市场,作为非接触式智能传感器应用。
ADI的新型24 GHz雷达产品提供出色的性能和高集成度,是小尺寸、低成本且易用的超低功耗解决方案,适用于物理检测、跟踪、安全控制和防撞警告系统等应用。
而随着这一新型射频雷达传感器应用的出现,许多希望能够快速完成雷达传感器解决方案评估、设计,制造雷达传感器解决方案的公司将会面临一系列新的开发挑战。
为了解决这一重大痛点问题,ADI公司特地开发了一款新颖的24GHz雷达系统级原型解决方案(称为DemoRAD, 演示雷达),可以在整个系统参考设计中实现硬件和软件应用开发。
它提供可在几分钟内开箱即用的软件示例,并轻松启动雷达传感器。
该方案可对产品进行快速原型制作,从而测量目标/对象存在、运动、角位置、速度以及传感器范围等实时信息。
演示雷达是一款完整的天线到比特解决方案,拥有完整的ADI信号链。
采用ADI公司的24 GHz、多通道雷达解决方案。
这个产品包括一个两通道发送,四通道接收解决方案,提供执行FM-CW调制的斜坡PLL,ADC可以将基带信号转换进入DSP,为我们提供完整的信号链。
传感器包含单个PCB,正面连接至24 GHz RF芯片组,集成2个发射器/4个接收器天线,反面有数据采集ADC和DSP。
客户可在这个参考设计的基础上构建其最终产品设计。
该演示雷达只需连接USB和电源,用户就可以启动运行,在几分钟之内收到雷达信号。
24GHz汽车毫米波雷达实验报告
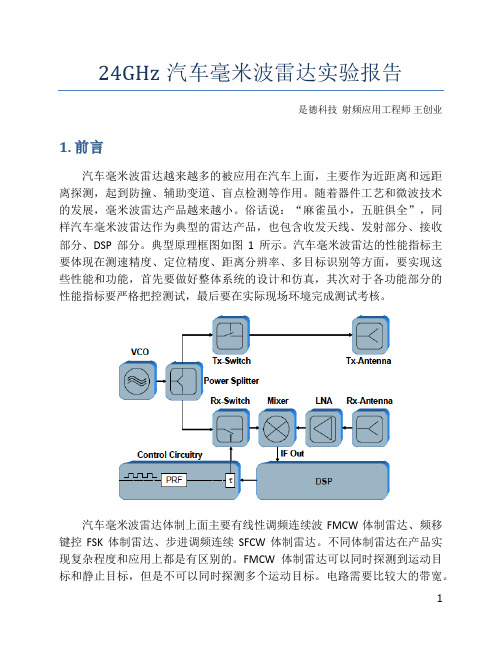
24GHz汽车毫米波雷达实验报告是德科技射频应用工程师王创业1. 前言汽车毫米波雷达越来越多的被应用在汽车上面,主要作为近距离和远距离探测,起到防撞、辅助变道、盲点检测等作用。
随着器件工艺和微波技术的发展,毫米波雷达产品越来越小。
俗话说:“麻雀虽小,五脏俱全”,同样汽车毫米波雷达作为典型的雷达产品,也包含收发天线、发射部分、接收部分、DSP部分。
典型原理框图如图1所示。
汽车毫米波雷达的性能指标主要体现在测速精度、定位精度、距离分辨率、多目标识别等方面,要实现这些性能和功能,首先要做好整体系统的设计和仿真,其次对于各功能部分的性能指标要严格把控测试,最后要在实际现场环境完成测试考核。
汽车毫米波雷达体制上面主要有线性调频连续波FMCW体制雷达、频移键控FSK体制雷达、步进调频连续SFCW体制雷达。
不同体制雷达在产品实现复杂程度和应用上都是有区别的。
FMCW体制雷达可以同时探测到运动目标和静止目标,但是不可以同时探测多个运动目标。
电路需要比较大的带宽。
FSK体制雷达,可以同时探测并且正确区分开来多个运动目标,但是不可以正确测量静止目标。
电路带宽比窄,系统响应捕获比较慢,成本比FMCW体制要低很多。
SFCW体制雷达,可以同时探测多个静止和运动的目标,并且将各个目标正确区分开来。
SFCW体制雷达具有更为复杂的调制波形,信号处理也更为复杂,产品实现成本高。
2.实验目的在汽车毫米波雷达系统研制过程中,经常会碰到各式各样的问题,譬如系统波形的选择和设计、系统链路的设计、信号处理算法的选择、微波电路的设计调试、天线的设计。
主要的问题主要体现在系统方案、处理算法模拟、微波电路指标调试及对系统性能的影响上。
典型的例子,在FMCW雷达系统,雷达探测距离分辨率不仅与信号的调制带宽有关,还与FMCW调制的线性度有关。
利用是德科技平台化解决方案,即软件+硬件+工程师,可以很容易的实现雷达系统设计仿真、处理算法验证、微波电路设计测试、天线设计测试。
汽车反射特性—24G vs 300G雷达
汽车反射特性—24G vs 300G雷达雷达传感器广泛应用于汽车行业,辅助驾乘在雨、雾、烟等不利天气条件和恶劣的环境中能安全驾驶。
目前,较为常见的汽车雷达工作在24G, 77G. 最新研究表明,低频太赫兹雷达(0.1-0.3THz),具备更高带宽、更窄的波束及较短的波长,能对路况实现更高分辨率成像。
汽车雷达要求的探测距离要达到200米,且低频太赫兹辐射的大气衰减更为严重;但相关研究表明,0.1-0.3 THz范围内相关频点的大气衰减是低于每公里10 dB,符合行业要求。
汽车雷达系统的目标检测算法至关重要的因素是典型道路目标的雷达反射率和雷达反射截面(RCS)。
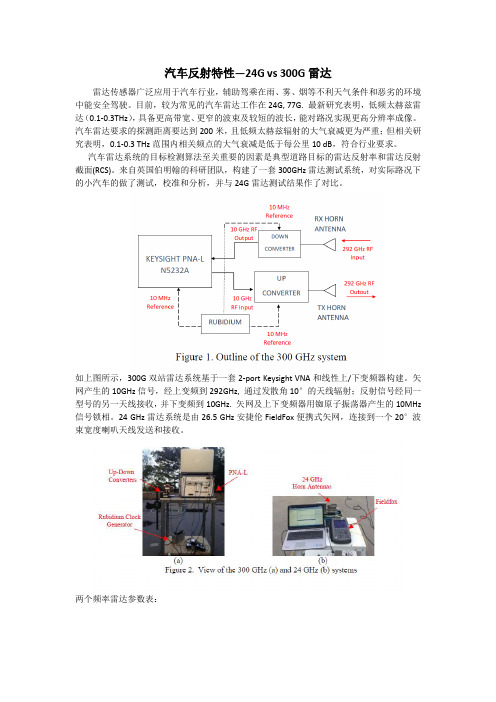
来自英国伯明翰的科研团队,构建了一套300GHz雷达测试系统,对实际路况下的小汽车的做了测试,校准和分析,并与24G雷达测试结果作了对比。
如上图所示,300G双站雷达系统基于一套2-port Keysight VNA和线性上/下变频器构建。
矢网产生的10GHz信号,经上变频到292GHz, 通过发散角10°的天线辐射;反射信号经同一型号的另一天线接收,并下变频到10GHz. 矢网及上下变频器用铷原子振荡器产生的10MHz 信号锁相。
24 GHz雷达系统是由26.5 GHz安捷伦FieldFox便携式矢网,连接到一个20°波束宽度喇叭天线发送和接收。
两个频率雷达参数表:实验在室外进行,如图3所示。
为评估24 GHz 和300 GHz系统天线相同辐照区域,汽车与雷达距离分别为11.5米和23米。
汽车在电脑控制下可360°旋转。
雷达获取的反射信号中,可以清晰分辨出地面反射和汽车目标反射。
图5显示出,地面反射引起的多径损耗,影响了雷达接收信号强度,引入零位分别为1米@24GHz和0.3米@300GHz.为获取和距离、系统增益及损耗不相关的汽车平均反射率,实验采用测量50cm金属球的RCS 作为校准参考。
经计算和校准后所得,汽车反射率极坐标图如下所示:实验对比结果,汽车RCS分别为3.5 dBsm@24 GHz, 6.8 dBsm@300 GHz. 验证了测试方法,也表明了汽车总体反射率在这两个频段是近似的,300GHz频点的平均反射率比24GHz 高约3dB.文献来源:DOI: 10.23919/IRS.2018.8448009欢迎垂询,获取更多我司24G, 94G, 220G及300G雷达产品信息。
传感器接线图解析

`传感器接线图双线直流电路原理图接线电压:10—65V直流常开触点(NO)无极性防短路的输出漏电电流≤0.8mA电压降≤5V注意不允许双线直流传感器的串并联连接三线直流电路原理图接线电压:10—30V直流常开触点(NO)电压降≤1.8V防短路的输出完备的极性保护三线直流与四线直流传感器的串联当串联时,电压降相加,单个传感器的准备延迟时间相加。
img]2-3.jpg border=0>四线直流电路原理图接线电压:10—65V切换开关防短路的输出完备的极性保护电压降≤1.8V三线直流与四线直流传感器的并联双线交流电路原理图常开触点(NO)常闭触点(NC)接线电压:20—250V交流漏电电流≤1.7mA电压降≤7V(有效值)双线交流传感器的串联常开触点:“与”逻辑常闭触点:“或非”逻辑当串联时,在传感器上的电压降相加,它减低了负载上可利用的电压,因此要注意:不能低于负载上的最小工作电压(注意到电网电压的波动)。
机械开关与交流传感器的串联断开的触点中断了传感器的电源电压,若在传感器被衰减期间内机械触点闭和的话,则会产生一个短时间的功能故障,传感器的准备延迟时间(t≤80ms)避免了立即的通断动作。
补偿方法:将一电阻并联在机械触点上(当触点断开时也是一样),此电阻使传感器的准备时间不再起作用,对于200V交流,此电阻大约为82KΩ/1w。
电阻的计算方法:近似值大约为400Ω/V双线交流传感器的并联常开触点:“与”逻辑常闭触点:“或非”逻辑当并联时,漏电流相加,例如:它可以—在可编程控制器的输入端产生一个高电平的假象。
—超过小继电器的维持电流,避免了在触点上的压降。
机械开关与交流传感器的并联闭和触点使传感器的工作电压短路,当触点短开以后只有在准备延迟时间(t≤80ms)之后传感器才处于功能准备状态。
补偿办法:触点上串联一个电阻可以可靠地保证了传感器的最小工作电压,因此避免了在机械触点断开之后的准备延迟。
SRR20X-2-2C-2124GHz短距离毫米波雷达传

SRR20X/-2/-2C/-2124GHz短距离毫米波雷达传感器
SRR20X探测区域示意图
安全、可靠、鲁棒、轻量化设计
SRR20X是大陆集团提供的一款新型短距离毫米波雷达传感器,可以适用于不同的应用场景
典型应用领域:
-各类车辆的简单防碰撞保护(尤其是电动车)
-中短距离车辆跟随控制、距离控制(各种车型、尤其是电动车)
-小范围区域监控(适用于危险或不能接近的区域)
-对车辆和特种物体的周围防护;
-目标检测
测量原理:
SRR2XX传感器采用快斜率PCM(脉冲压缩调制)调频体制,在一个测量周期内独立测量距离和速度(多普勒原理),目标实时刷新频率为33HZ。
SRR2XX可在极短时间内探测到远达50m的目标,并能分辨出两个甚至更多目标的相对角度和速度。
优点:
快速安全:SRR2XX很好的处理了测量性能与高安全性之间的矛盾,可实时检测目标的距离并根据当前车速判断是否存在碰撞风险
可靠:具有自动故障检测功能,可识别传感器问题,并自动输出故障码
鲁棒、轻量化设计:通过使用相对简单的雷达测量技术,以及在汽车行业的深度研发和批量生产基础,可以保证产品鲁棒和轻量化性能
SRR2XX产品参数。
雷达感应原理调试

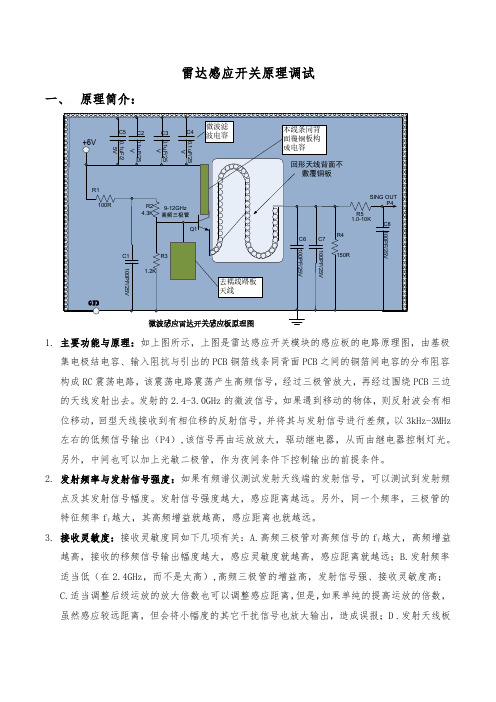
雷达感应开关原理调试一、原理简介:1.主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。
发射的2.4-3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。
另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。
2.发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。
该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。
3.接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号P4。
4.发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。
一般的发射频率2.5GHz左右最佳,频率过高,则高频三极管增益降低,感应距离近。
发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。
5.发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及其发射信号幅度。
发射信号强度越大,感应距离越远。
但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。
另外,同一个频率,三极管的特征频率f T越大,其高频增益就越高,感应距离也就越远,所以,最好设计调整PCB,将频点做到2.4GHz。
24Ghz车载雷达原理和设计大报告
超高速通信电路与系统技术概论课程报告小组成员:学院:信息科学与工程学院指导教师:二零一七年六月24GHz车载雷达原理与设计1.研究背景与车载雷达的开展与应用1.1研究背景自从1904年德国工程师里斯蒂安在柏林皇家专利会上取得了雷达设计的创造专利以后,雷达的开展可谓是日新月异。
雷达最初的目的在于无线电检测和测距,辐射出能量并检测反射回来的波,根据时间差可计算出与目标物体之间的距离。
现在技术较为成熟的是调频连续波雷达,一个频率连续变化的波,其中一局部波束信号作为参考物,另一局部波束信号辐射出去,经过目标物体局部反射后的信号与参考信号进展混频从而产生一个差频信号,通过信号处理那么可以得到距离。
这种技术不仅精度极高,同时本钱较低,因此广为流行。
据调查统计,追尾是交通事故最主要的发生形式,尤其是高速公路上的超速现象和雨雪雾霾天气更是事故的导火索。
交通事故大多数是驾驶员没有意识到前方车辆距离自身车辆太近或者完全来不及反响所造成的,如果驾驶员能提前0.5秒意识到危险的靠近,那么交通事故将减少至少一半。
对此,目前已采取了许多措施,其中主要有平安带、平安气囊和保险杠等,但这都只是“治标不治本〞。
要想从根本上解决问题,汽车平安间距检测系统的存在必不可少。
汽车平安间距检测系统主要的作用为停车辅助和防止碰撞。
停车辅助是指驾驶员在倒车时倒车雷达会帮助他们探测后视镜看不见的物体,通常是用来探测前方物体的距离,当距离过小存在危险时,警报会发出声响提醒驾驶员注意,通常距离越小警报声显得越危急。
除此之外,碰撞防止是指在碰撞快要发生时发出警报提醒驾驶员及时作出应对,减少驾驶员的反响时间,极大程度地防止了碰撞的发生。
该系统同样也是以雷达为根底,雷达如图1.1所示,它不断探测周围车辆的距离和速度,不仅会发出警报,必要时也会自动拐弯或是减速。
由此可见,汽车平安间距检测系统对于减少交通事故的发生起着不可替代的关键作用。
图1-1防撞雷达示意图由于交通事故率每一年都在上涨,汽车雷达得到了业内人士越来越多的关注,从上个世纪70年代至今,渐渐出现了超声波、激光、红外、微波等多种方式的汽车雷达系统。
BGT24MTR11中文使用手册

Infineon BGT24MTR11 24 GHZ雷达用户向导目录1引言 (2)2 概述 (2)3 VCO 压控振荡器 (2)3.1调谐电压输入 (3)3.2预分频器 (4)3.2.1 16分频器 (4)3.2.2 65536分频器 (4)4 发射机 (5)4.1 TX 端 (5)4.1.1 输出功率的使能与禁用 (6)4.1.1.1 通过SPI总线使能/禁用 (7)4.1.1.2 通过TXOFF引脚使能/禁用 (7)4.2 本振LO (7)5 接收机 (8)5.1低噪声放大器ANA (8)5.2 混频器 (9)6 传感器 (9)6.1 功率传感器 (10)6.2 温度传感器 (10)图目录图一 BGT24MTR11结构图图二 VCO频率与调谐电压VFINE=VCOARSE及温度的关系图图三三维图:输出频率与VCOARSE及VFINE的关系图图四二维图:输出电压与VCOARSE及VFINE的关系图图五 Div16的输出终端图图六不同温度下TX输出的功率与频率的关系图图七功率传感器的转换特性图图八温度传感器的转换特性图表格目录表一输出功率简表表二模拟多路复用器真值表1引言本文关于如何使用BGT24MTR11提供了一些数据手册中未作说明的补充信息。
BGT24MTR11是英飞凌公司24 GHZ雷达收发产品BGT24系列的主导产品,在此操作说明书中作为所有的BGT24产品的一个例子。
在此提及的BGT24MTR11的基本组成与BGT24MTR12、BGT24MR2的基本组成一样。
此操作说明书中的附加信息同样适用于其他产品。
2 概述下图显示了BGT24MTR11的内部结构图。
此操作说明书包括结构图的一下分节:●压控振荡器和前置分频器●发射机链,包括TX和LO输出端●接收器链,包括低噪声放大器和混频器●片上传感器3 VCO 压控振荡器BGT24MTR11的信号发生器由一个自由运行的振荡器组成,该振荡器带有两路单独的调谐电压输入端,输入端后跟一个缓冲放大器,以减少频率牵引效应。
SYH24A1 24G 毫米波雷达使用说明书

SY H24A1 24G毫米波雷达使用说明书一、原理毫米波雷达是通过雷达天线发射和接收电磁波,测量物体的运动幅度和位置的传感器。
通过算法解析后,来判断人体的呼吸,运动,人数,距离,方向等信息。
二、应用范围毫米波雷达不受温度、湿度、噪声、气流、尘埃、光照等影响,适合在恶劣环境中使用;适用于养老检测,酒店,民宿管理,办公室人员管理,闯入报警,道闸防撞,人数统计等需要测试运动状态的环境。
三、探测范围本雷达模组测量人体活动面积大约200平方米以内。
物体运动最大感知距离小于20米,测量呼吸距离为5米内。
雷达天线测量范围横向80°/纵向30°,云帆瑞达雷达模块通常是可以通过不同的算法,测量不同距离的产品。
图3-1 模组测量范围演示图片四、安装方式通过对不同探测距离以及不同运动幅度的监测,根据房间布局做出合适部署。
在室内时,安装在高处会有更好的体验效果,如空调,热水器,监控摄像头等设备的安装高度体验更佳。
1.水平安装方式水平安装时,站姿或者坐姿体态更利于监测。
适用于办公室,家电,道闸,客厅等空旷环境。
图4-1 水平安装方式检测图示雷达模组水平安装高度建议为1米~1.5米,雷达水平正向安装,安装倾角在正负5o以内,雷达模组正前方需无明显遮挡物及覆盖物,正对方向需尽量覆盖人体活动区域。
在该安装模式下,人体运动检测最大距离大于10米;人体静止检测最大距离约等于5米,一般有效距离作用距离为3~4米。
2.倾斜安装方式测量房间内人员运动,主要适用于酒店、大厅,庭院安防等环境。
图4-2 倾斜安装方式检测图示倾斜安装时高度建议为2-3米;雷达模组下视倾斜角度范围为10°~30°,模组正对方向需无明显遮挡物及覆盖物。
在该安装模式下,人体运动检测最大距离小于10米;人体静止检测最大距离小于5米,一般有效距离为3~4米。
该模式下,雷达正下方及邻近区域可能存在监视盲区,随着下视倾角增加,静态人体探测距离会明显缩短。
24GHz FMCW雷达收发器芯片组的特点与应用介绍
24GHz FMCW雷达收发器芯片组的特点与应用介绍本文介绍了适于汽车和工业传感器应用的24GHz FMCW雷达收发器芯片组,ADF5904搭配IC (发射机ADF5901芯片和ADF4159 PLL)使用兼具高性能相位噪声、输出功率和高速斜坡能力,使该器件针对传感器具有更低的噪底性能。
ADF5904:4通道、24GHz接收机下变频器MMICADF5904集成式多通道接收机下变频器具有10dB噪声系数性能,优于竞争型对手器件3dB。
该器件功耗低50% ,采用小型、性价比高的5mm×5mm LFCSP塑料封装。
该器件的四个片内接收通道采用简单的单端连接与四个独立天线相连,从而简化了射频传输线设计和PCB布局布线,同时缩小了电路板尺寸。
接收机下变频器可同时直接放大并转换4路24GHz接收机信号,以产生高质量、高幅度基带信号或降低频率信号,以便轻松连接ADI 4通道模数转换器或模拟前端(AFE)。
ADF5904还提供集成式温度传感器,无需使用分立式检测元件,这些元件原本可能需要在系统装配和测试期间占用额外的时间与资源来校准。
ADF5904针对采用数字波束成形的多通道接收机高频应用设计,如汽车ADAS雷达、微波雷达传感器和工业雷达系统,在这些应用中,能效正在成为越来越重要的系统级设计考虑因素。
ADF5904 24GHz接收机具有同类一流的接收机灵敏度,相比竞争型RF IC技术整体功耗更低,因而适合此类应用以及其它传感器应用。
主要特性4 个接收通道,接收机通道增益:22dB;噪声系数:1 0 d B ,P 1 d B :-10dBm;功耗:0.5mW(全部4个通道开启);LO输入范围:-8dBm至+5dBm;接收机至IF隔离:30dB;RF信号带宽:250MHz;。
IPM-165中文资料
深圳市华儒科技有限公司
SHENZHEN HUARU TECHNOLOGY CO.,LTD.
版本 V 1.1
产品手册
- 8 -
输入/输出 输入 输出 输入
1. Vcc:电源。外接 5V 正向电压源。 2. IF1:同相信号(I)输出端。此信号中携带有动态目标的运动信息。 3. GND:接地引脚。
深圳市华儒科技有限公司
SHENZHEN HUARU TECHNOLOGY CO.,LTD.
版本 V 1.1
产品手册
- 5 -
IPM-165 24GHz 平面天线雷达
7.2 天线罩安装方式
天线罩材料选择
在安装时,天线罩不可采用金属材料或金属层;可采用非含碳的塑料材料或塑料泡沫。 正确方法 正确方法 1. 天线罩采用塑料材料(ABS,PVC 等)时,须正确估算出天线罩的厚度和空间,并采取不 直接与天线结构接触的方式来包裹天线; 2. 天线罩采用泡沫材料 (如 Stypopor 或相似材料) 时, 应保证材料的相对介电常数接近于 1。 错误方法 1. 2. 3. 4. 用金属箔或部分金属部件来包裹天线; 用任何种类的油漆或清漆喷洒天线结构; 用 CFK 薄片(可导电)包裹天线; 塑料材料与腐蚀的天线结构直接接触(对贴片的共振频率有较高的介电常数影响)。
IPM-165 24GHz 平面天线雷达
产品手册 V1.1 2011.9
目
1 2 3 4 5 6 7
录
产品简介 ............................................................................................................................... - 1 原理结构 原理 结构 ............................................................................................................................... - 2 技术参数 ............................................................................................................................... - 3 天线样式 ............................................................................................................................... - 4 接口定义 接口 定义 ............................................................................................................................... - 5 功能应用 功能 应用 ............................................................................................................................... - 6 传感器安装说明 传感器安装说明 .................................................................................................................... - 7 7.1 机械尺寸及安装方向 ........................................................................................................... - 7 7.2 天线罩安装方式 ................................................................................................................... - 8 版本信息 ....................................................................................................................................... - 9 公司信息 ....................................................................................................................................... - 9 -
24GHz雷达传感器的运用电路图
24GHz雷达传感器的运用电路图本产品可广泛应用于类似自动门控制开关、安全防范系统、ATM自动提款机的自动录像控制系统、火车自动信号机等,需要自动感应控制的场所。
这是一种标准的24GHz雷达传感器,这种探测方式与其它探测方式相比具有如下的优点:1、非接触探测;2、不受温度、湿度、噪声、气流、尘埃、光线等影响,适合恶劣环境;3、抗射频干扰能力强;4、输出功率仅有10mW,对人体构不成危害;5、远距离:探测范围超过20米。
多普勒原理简介:多普勒理论是以时间为基础的,当无线电波在行进过程中碰到物体时,该电波会被反射,反射波的频率会随碰到物体的移动状态而改变。
如果无线电波碰到的物体的位置是固定的,那么反射波的频率和发射波的频率应该相等。
如果物体朝着发射的方向移动,则反射回来的波会被压缩,就是说反射波的频率会增加;反之,当物体朝着远离发射的方向移动时,反射回来的波的频率会随之减小,这就是多普勒效应。
这种现象在日常生活中会经常遇到,比如一辆鸣笛的警车从你身边高速通过时,你听到的声音的频率是变化的:当警车高速接近你的时候,(与静止声源相比)声音传输的时间缩短,频率升高。
当警车远离你的时候,声音的传输时间拉长,频率降低。
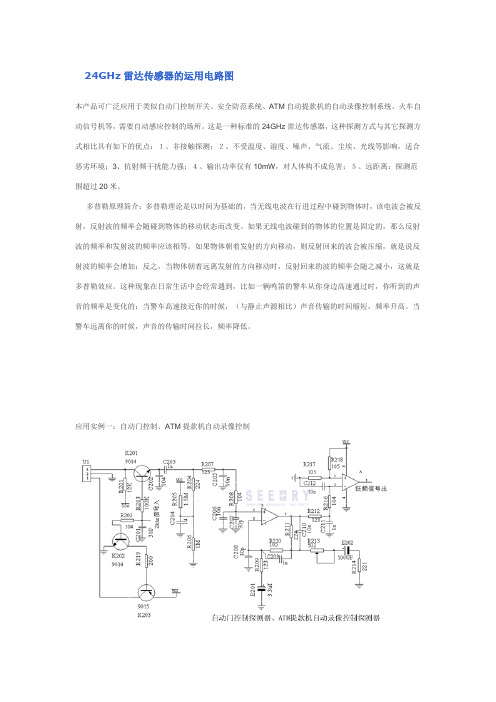
应用实例一:自动门控制、ATM提款机自动录像控制本电路作用距离4-15米连续可调,和热释电红外探测器相比,具有抗强光干扰,探测距离远,不受温、湿度影响等优点。
电路原理简述:图中U1是微波感应探测器模块,通过K202,K203,R202,R219向模块提供2kHz 的脉动电源(能产生频率为2khz 高电平宽度为20uS的电路很多,如使用反向器CD4069、lm555 等),K201在U1起作用期间导通,把U1输出的反应物体移动的低频信号选通输出,C202为采样保持电路,保证信号的连续和完整。
由LM358组成的两极低通放大电路把U1的输出放大,在LM358的1脚输出。
可调电阻R213 用于调整一级放大器的增益,调整R213的大小可以调整探测距离。
雷达感应原理调试
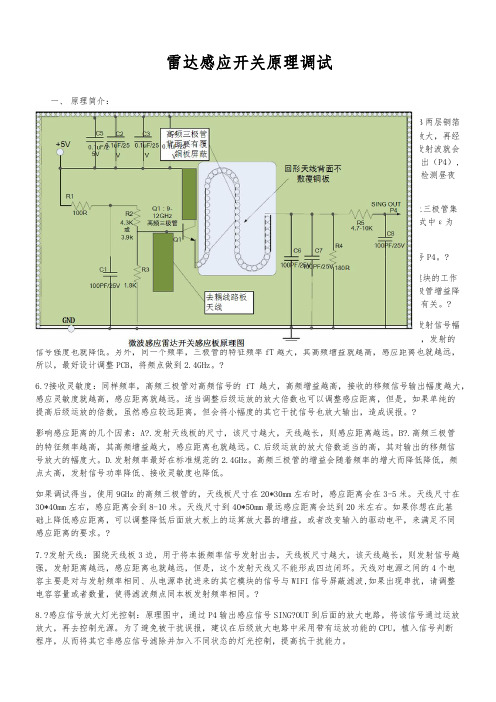
雷达感应开关原理调试一、原理简介:1.主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由基极集电极结电容、输入阻抗与引出的PCB铜箔线条同背面PCB之间的铜箔间电容的分布阻容构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。
发射的2.4-3.0GHz的微波信号,如果遇到移动的物体,则反射波会有相位移动,回型天线接收到有相位移的反射信号,并将其与发射信号进行差频,以3kHz-3MHz 左右的低频信号输出(P4),该信号再由运放放大,驱动继电器,从而由继电器控制灯光。
另外,中间也可以加上光敏二极管,作为夜间条件下控制输出的前提条件。
2.发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及其发射信号幅度。
发射信号强度越大,感应距离越远。
另外,同一个频率,三极管的特征频率f越大,其高频增益就越高,感应距离也就越远。
T越大,高频增益3.接收灵敏度:接收灵敏度同如下几项有关:A.高频三极管对高频信号的fT 越高,接收的移频信号输出幅度越大,感应灵敏度就越高,感应距离就越远;B.发射频率适当低(在2.4GHz,而不是太高),高频三极管的增益高,发射信号强、接收灵敏度高;C.适当调整后级运放的放大倍数也可以调整感应距离,但是,如果单纯的提高运放的倍数,虽然感应较远距离,但会将小幅度的其它干扰信号也放大输出,造成误报;D .发射天线板的尺寸,该尺寸越大,天线越长,则感应距离越远。
4.如果调试得当,使用9GHz的高频三极管的,天线板尺寸在20*20mm左右时,感应距离会在3-5米。
天线尺寸在30*30mm左右,感应距离会到8-10米。
天线尺寸到40*50mm最远感应距离会达到20米左右。
如果你调试后感应距离较远,可以调整降低后面放大板上的运算放大器的增益,或者改变输入的驱动电平,来降低感应距离,而不是调整三极管与天线。
云帆瑞达 R24VD1B生物感知雷达产品手册说明书

R24VD1B_生物感知雷达产品手册(V1.5)产品特点⏹静止人体探测⏹生命体征检测⏹24GHz毫米波雷达传感器⏹基于多普勒雷达技术,实现雷达扫描区域人员感知功能;⏹实现运动人员及静止人员的同步感知功能;⏹运动感知最大距离:≤12米⏹微动感知最大距离:≤5米⏹人体感知最大距离:≤3米⏹天线波束宽度:⏹R24VD1B:水平90°/垂直60°扇形波束⏹具备场景识别能力,识别有人/无人及人员活动状态,输出体动⏹不受温度、湿度、噪声、气流、尘埃、光照等影响,适合恶劣环境;⏹输出功率小,长时间照射对人体无伤害;⏹无人到有人探测时间:0.5秒以内⏹有人到无人探测时间:大于1分钟R24VD1B型号说明✧R24VD1B-窄波束人体感知雷达传感器,90度/60度扇形波束(测量精度高,建议在6米距离内使用)产品应用✧健康守护✧智能家电(电视、浴霸、安防等)✧办公室节能(空调、照明)✧睡眠监控(睡眠曲线)✧居家安防✧自动门、电梯等产品封装体积:≤35MM×30MM×5MM接口:P ITCH2.0MM接口,双排插针目录1.概述 (4)2.电气特性及参数 (5)2.1.检测角度及距离 (5)2.2.电气特性 (5)2.3.RF性能 (5)3.模块尺寸及引脚说明 (6)3.1.模块尺寸封装 (6)3.2.引脚说明 (6)3.3.使用接线图 (7)4.主要工作性能及 (7)4.1.雷达模块工作范围 (7)4.2.主要功能及性能 (7)5.雷达工作及按照方式 (8)5.1.安装方式 (8)5.1.1.水平安装 (8)5.1.2.倾斜安装 (9)5.1.3.置顶安装 (10)5.2.雷达模块工作模式 (10)6.典型应用模式 (11)6.1.智能家电应用 (11)6.2.家居场所应用 (12)6.3.卧室安装及应用 (12)6.4.节能控制应用 (12)7.注意事项 (13)7.1.启动时间 (13)7.2.有效探测距离 (13)7.3.雷达生物探测性能 (13)7.4.电源 (13)8.常见问题 (14)9.免责声明 (14)10.版权说明 (14)11.联系方式 (14)12.历史版本更新说明 (15)1.概述R24VD1B雷达模块是采用毫米波雷达技术,实现的人体运动感知及人体生物感知的雷达探测模块。
24GHz车载雷达射频前端设计
提交论文日期
二○一四年三月
万方数据
万方数据
西安电子科技大学 学位论文独创性(或创新性)声明
秉承学校严谨的学风和优良的科学道德,本人声明所呈交的论文是我个人在 导师指导下进行的研究工作及取得的研究成果。尽我所知,除了文中特别加以标 注和致谢中所罗列的内容以外,论文中不包含其他人已经发表或撰写过的研究成 果;也不包含为获得西安电子科技大学或其它教育机构的学位或证书而使用过的 材料。与我一同工作的同志对本研究所做的任何贡献均已在论文中做了明确的说 明并表示了谢意。 申请学位论文与资料若有不实之处,本人承担一切的法律责任。 本人签名: 日期:
万方数据
万方数据
目 录
第一章 绪论 ................................................................................................................ 1 1.1 研究背景............................................................................................................ 1 1.2 车载雷达系统发展现状..................................................................................... 2 1.3 本文的工作及章节安排..................................................................................... 3 第二章 车载雷达原理与方案 ..................................................................................... 5 2.1 雷达工作体制选择 ............................................................................................ 5 2.2 调频连续波(FMCW)雷达 ............................................................................. 6 2.2.1 测距与测速 .................................................................................................. 7 2.2.2 相位法测角 ................................................................................................ 10 2.3 射频系统方案 .................................................................................................. 11 第三章 发射组件与锁相环 ....................................................................................... 15 3.1 雷达发射机 ...................................................................................................... 15 3.1.1 基础知识介绍 ........................................................................................... 15 3.2 车载雷达发射组件设计................................................................................... 17 3.2.1 发射机形式选择及指标设定 .................................................................... 17 3.2.2 器件选择 ................................................................................................... 17 3.2.3 设计与测试 ............................................................................................... 20 3.3 锁相环 ............................................................................................................. 24 3.3.1 锁相环原理及主要参数 ............................................................................ 24 3.3.2 集成锁相环 ............................................................................................... 25 3.3.3 锁相环芯片选择........................................................................................ 26 3.3.4 锁相环电路设计........................................................................................ 28 第四章 接收组件设计............................................................................................... 31 4.1 雷达接收机 ...................................................................................................... 31 4.2 雷达接收组件主要技术参数 ........................................................................... 32 4.2.1 噪声 ........................................................................................................... 32 4.2.2 灵敏度 ........................................................................................................ 32
24GHz雷达传感器原理
24GHz雷达传感器原理第一篇:24GHz雷达传感器原理24GHz雷达传感器原理一:CW多普勒雷达传感器将24GHz选为发射频率,利用发送与接收信号的频率差,通过公式计算出物体运动的速度。
经过参考信号与回波信号的混频,双通道传感器输出两个频率幅度相同,相位差为90°的中频信号IF1和IF2,根据90°相位引导的信号类型,可识别物体的运动方向(远离或靠近)二:FMCW 雷达传感器如果要测量一个参数【距离】,如静态物体到传感器的距离,那么选用线性升坡或降坡作为发射频率的时间相关函数就足够了,并定期重复这些坡,以期得到可能的平均值。
根据延迟效应的计算公式可以得到物体的距离。
24GHz雷达传感器运用交通监测A:交通监控:车辆流量,车辆分类,速度监控(警用雷达)B:距离测量:停车帮助,起停巡航,ACC盲点检测,防撞控制C:火车运用:铁路障碍检测,站台监控,调车帮助,速度测试D:轨道车辆:导航F:智能驾驶物体探测A:开门装置B:卫生设施:水龙头,小便池C:内部和外部侵入报警,安防管理D:智能照明E:计数装置运用方面A:跑步,滑雪,冲浪等运动中测距,测速B:球类测速工业应用:A:液位测量B 流速测量C 泥浆密度测量D 传送带监控E 机器人24GHz雷达传感器案例一:雷达传感器在物联网中运用24GHz雷达传感器在物联网中起到一个信息采集的作用,它在家庭智能防入侵,机场防入侵,智能电网,监狱系统等上面因为其具有稳定性和受环境因素影响小的原因,可以及时的对物体做出反应而被采用,和视频以及其他各种传感技术一起发挥着重要作用。
二:雷达传感器在汽车驾驶辅助系统中的运用24GHz雷达传感器在汽车辅助驾驶,ACC自适应雷达巡航控制系统等上面起到检测与预防的作用,他和汽车的其他制动系统结合在一起,可以有效的防止交通碰撞事故,国外此项技术运用较为成熟,国内起步较晚,但有相关单位进行此项研究。
三:交通检测在交通工程上,速度是计量与评估道路绩效和交通状况的基本重要数据之一。
微波(雷达)感应模块原理调试
雷达感应开关原理调试一、原理简介:1.?主要功能与原理:如上图所示,上图是雷达感应开关模块的感应板的电路原理图,由集电极外PCB两层铜箔间的电容、三极管内阻、寄生电容等构成RC震荡电路,该震荡电路震荡产生高频信号,经过三极管放大,再经过围绕PCB三边的天线发射出去。
发射的2.4-3.2GHz的微波信号如果遇到移动物体,则反射波相对发射波就会有相位变化,回型天线接收到反射信号,反射波与发射信号的相位移频就会以3-20MHz左右的低频输出(P4),该信号再由后级运放放大,驱动继电器,从而由继电器控制灯光。
另外,中间也可以加上光敏二极管检测昼夜光线,作为夜间条件下控制输出的前提条件。
?2.?发射频率:RC振荡电路的频率f=1/2πRC,公式中的R是原理图中三极管的输入阻抗,C是PCB上三极管集电极基极引线正反面铜箔之间的电容以及三极管寄生电容组成的总电容。
该电容量公式为C=εS/d,式中ε为介质(在这里就是指的PCB板材的介电常数),S为PCB极板面积,d为极板间距也就是PCB厚度。
?3.?接收:通过回型天线接收反射回来的雷达波,如果发射与接收波之间有相位移频,则输出低频信号?4.?发射避开公共频段又不能过高:因为3G和4G手机信号和WIFI信号的频率范围在1.8-2.4GHz,模块的工作频率尽可能避开这个频段,避免相互干扰。
一般的发射频率2.5GHz左右最佳,频率过高,则高频三极管增益降低,感应距离近。
发射频率同天线部分PCB线路板尺寸大小、厚度、布线、三极管输入阻抗与电容等有关。
?5.?发射频率与发射信号强度:如果有频谱仪测试发射天线端的发射信号,可以测试到发射频点及其发射信号幅度。
发射信号强度越大,感应距离越远。
但是,高频三极管来说,随着频率的增加,其增益逐渐降低,发射的信号强度也就降低。
另外,同一个频率,三极管的特征频率fT越大,其高频增益就越高,感应距离也就越远,?B?.高频三极管C.后级运放的放大倍数适当的高,其对输出的移频信2.4GHz。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
24GHz雷达传感器的运用电路图
本产品可广泛应用于类似自动门控制开关、安全防范系统、ATM自动提款机的自动录像控制系统、火车自动信号机等,需要自动感应控制的场所。
这是一种标准的24GHz雷达传感器,这种探测方式与其它探测方式相比具有如下的优点:1、非接触探测;2、不受温度、湿度、噪声、气流、尘埃、光线等影响,适合恶劣环境;3、抗射频干扰能力强;4、输出功率仅有10mW,对人体构不成危害;5、远距离:探测范围超过20米。
多普勒原理简介:多普勒理论是以时间为基础的,当无线电波在行进过程中碰到物体时,该电波会被反射,反射波的频率会随碰到物体的移动状态而改变。
如果无线电波碰到的物体的位置是固定的,那么反射波的频率和发射波的频率应该相等。
如果物体朝着发射的方向移动,则反射回来的波会被压缩,就是说反射波的频率会增加;反之,当物体朝着远离发射的方向移动时,反射回来的波的频率会随之减小,这就是多普勒效应。
这种现象在日常生活中会经常遇到,比如一辆鸣笛的警车从你身边高速通过时,你听到的声音的频率是变化的:当警车高速接近你的时候,(与静止声源相比)声音传输的时间缩短,频率升高。
当警车远离你的时候,声音的传输时间拉长,频率降低。
应用实例一:自动门控制、ATM提款机自动录像控制
本电路作用距离4-15米连续可调,和热释电红外探测器相比,具有抗强光干扰,探测距离远,不受温、湿度影响等优点。
电路原理简述:图中U1是微波感应探测器模块,通过K202,K203,R202,R219向模块提供2kHz 的脉动电源(能产生频率为2khz 高电平宽度为20uS的电路很多,如使用反向器CD4069、lm555 等),K201在U1起作用期间导通,把U1输出的反应物体移动的低频信号选通输出,C202为采样保持电路,保证信号的连续和完整。
由LM358组成的两极低通放大电路把U1的输出放大,在LM358的1脚输出。
可调电阻R213 用于调整一级放大器的增益,调整R213的大小可以调整探测距离。
应用实例二:火车自动信号机开关电路
作用距离:1-9米连续可调。
这种电路的抗干扰能力更强,调整范围更大,可以应用于野外和条件较为恶劣的场所使用。
原理简述:上图是一个完整的应用电路,U3D(LM339)及周围相关元件组成2kHz 低占空比振荡器,P1,P2 提供脉动电源和选通。
E9为采用保持电容,反应物体移动的低频信号经过LM324 A、B 及周围元件组成的低通放大电路放大后,到由LM324 C 及周围相关元件组成的比较器。
C9-C12,R32-R35组成的低通滤波网络虑除工频干扰信号。
由U3A组成的延时电路保证了发现物体移动后电路有相当时间的稳定输出。
由U1A及相关元件组成的第一级放大电路,其增益A1A≈R30/R31=375/473=78.7;第二级放大器由U1B及相关电路组成,放大增益A1B≈R36/(R35+R34)=475/943=50;两级放大的增益为A=78.7×50=39 35,即为36db。
由U1C及R39、R40、P2、E12组成的电压比较器,把前级放大的信号变换成脉冲信号,再由U3A及相关元件组成的延时电路延时输出。
调整P2可以改变探测距离的大小,改变R41、E13、R42的大小可以调整输出时间的长短。
应用实例三:三鉴探头
原理概述:三鉴是指红外主导、微波辅助、单片机智能处理(PIR/MW/AI)的综合探测技术,当被动红外发现目标后启动微波检测电路,当两种信号均有效并通过单片机智能处理符合报警输出条件时,由单片机给出报警信号。
电路简析:本电路中被动红外(PIR)信号经滤波后直到单片机的比较器的输入口17、18脚,比较器把红外头感应到的信号直接转换为脉冲信号,数字信号经MPU PIC16C622A 的处理,利用软件可以进行出、入识别以及干扰的虑除。
RB1输出2kHz占空比为5%的脉冲(宽度为20uS),驱动P2给微波探测器提供脉冲电源。
微波探测器的低频输出通过P1选通输出到C101采用保持电容上。
反应物体移动的低频信号经U1A及相关元件组成的可编程运算放大器放大,再经U1B组成的比较器进行电平转换,转换后的脉冲信号到PIC16C622 的RB3脚输入到MPU。
当红外发现目标后,RB1输出高电平,三极管K3导通,由U1A组成的可编程放大器的增益由100倍增加到10000倍左右,微波探测器电路开始工作,MPU开始检测物体移动信号。
MPU通过对PIR信号分析,可以判断出红外源的出入情况,以此可以排除热空气以及非热源移动物体的干扰(如飘动的窗帘、转动的电扇等),同时综合微波探测器的信号,可以排除多种热源的干扰。
合理的MPU数学模型和编制科学的软件,可以识别出体重小于20kg宠物。
基本上可以消除宠物的引起的误报。
本电路中改变P1的大小,可以改变放大电路的增益,从而调整微波电路的探测距离。